Изобретение относится к экзоскелетам, в том числе к промышленным экзоскелетам - носимым на человеке операторе средствам индивидуальной защиты опорно-двигательного аппарата, компенсирующим и/или перераспределяющим нагрузку на опорно-двигательный аппарат и предотвращающим или снижающим негативное воздействия тяжести трудового процесса на опорно-двигательный аппарат человека при манипуляциях с грузами при помощи ручного труда, который может быть использован, например, при проведении погрузочно-разгрузочных, в том числе такелажных работ, предполагающих поднятие и перемещение разнообразных тяжелых и/или объемных предметов, а также при монтаже или сборке узлов и агрегатов, предполагающих удержание и фиксацию деталей или инструмента при выполнении работ.
Известен «Пассивный экзоскелет» ИМ 217935 (2023), представляющий собой плотно подогнанный к телу корсет, соединяющий грудную и пояснично-крестцовую опоры, опоры для бедер, опорную пластину спины, расположенную между грудной и пояснично-крестцовой опорами, регулировочные стропы, два эластомера, расположенные на опорной пластине спины и соединенные с задней частью опор для бедер. Известен также ряд более ранних пассивных экзоскелетов, например, по патентам ИМ 190786 (2019), ИМ 194544 (2019), US 20210007874 (2019), ИМ 198841 (2020), ИМ 211198 (2021), ИМ 212301 (2021)ПМ216 018 (2022), имеющих сходный состав и структуру, незначительно различающихся направлением укладки эластичных строп, их строением, способами их соединения с грудной опорой и опорой для бедер и регулировками длины эластомеров под анатомические особенности человека пользователя. Общим для этих технических решений является принцип работы, который основан на свойствах эластомеров накапливать потенциальную энергию при их растяжении во время наклона ипри приседании человека, например, для захвата груза руками и возврате накопленной упругой энергии при подъеме.
Принципиальным недостатком таких экзоскелетов является приложение сжимающей нагрузки на позвонки при наклоне или приседании оператора, возникающей вследствие растяжения эластомеров, упругая сила которых, предназначенная для разгрузки мышц спины при подъеме, в то же время является дополнительной травмирующей нагрузкой на позвоночник как при подъеме оператора с грузом, так и при наклонах и приседаниях за грузом. При этом работает положительная обратная связь: чем больше мы хотим разгрузить мышцы спины, тем больше догружаем межпозвоночные диски, особенно в пояснично-крестцовой зоне S1-L5, причем для создания большей разгружающей силы за счет растяжения эластомеров помимо собственного веса оператора потребуется прикладывать мышечные усилия сгибателей тазобедренных суставов и сгибателей позвоночника - мышц живота, что суммарно приводит к дополнительным затратам энергии и мышечной усталости пользователя.
Известен также «Экзоскелет» по патенту ПМ 198903 (2020), состоящий из функционально соединенных между собой силового модуля, модуля крепления и модуля подъема груза. Силовой модуль включает в себя жесткий спинной каркас, соединяемый с помощью шарнира с бедренным звеном, которое, в свою очередь, соединено шарнирно с голенным звеном, шарнирно соединенным со звеном стопы. Спинной каркас представляет собой жесткий рамный корпус, который присоединяется с помощью грудных фиксирующих креплений и креплений поясничного отдела к торсу оператора. Подобным образом устроен спинной каркас по патенту «Управляемый модуль спины экзоскелета» ПМ 208086 (2020).
Также известен «Силовой модуль экзоскелета» по патенту ПМ 215 116 (2022) спинной каркас которого так же, как и в рассмотренных выше ПМ198903, ПМ 208086, представляет собой жесткую рамную конструкцию, которая крепится к телу оператора с помощью жилета и поясного ремня.
Известен «Модульный экзоскелет» ПМ 202 567 (2020), представляющий собой жесткую каркасную раму, выполненную в виде буквы «Г», на которую установлены нагрудная и спинная пластины. Рама крепится на теле оператора с помощью пояса со смонтированной на нем набрюшной пластиной, которая посредством трубчатой фронтальной опоры соединяется с рамой и нагрудной пластиной. При этом спинная пластина изначально имеет изогнутую форму, в целом повторяющую естественные изгибы позвоночника, а регулировка прогиба спинной пластины под индивидуальные особенности оператора обеспечивается за счет установки мягких прокладок разной толщины. Таким образом туловище (грудная клетка, живот, спина, таз) оператора заключено в жесткой каркасной раме с трехточечным контактом через объемные мягкие прокладки со спинной пластиной сзади и нагрудной и брюшной пластинами спереди.
Кроме того, известен «Грузовой экзоскелет с настройкой под антропометрические параметры пользователя» по патенту на изобретение №2665116 (2018), у которого спинно-грудной узел, соединенный с «шасси», являющимся по существу поясом, вместе образуют жесткую каркасную конструкцию, размещенную вокруг торса человека и, благодаря применению ряда технических решений, обеспечивает возможность регулирования ее ширины, толщины, высоты и угла наклона передней части для обеспечения ее прилегания к верхней части груди, спины и боков человека.
Общим недостатком, присущим рассмотренным экзоскелетам с жестким каркасом, является ограничение подвижности оператора в экзоскелете при поворотах вокруг вертикальной оси, при наклонах вправо-влево во фронтальной плоскости, а также существенное стеснение проведения такелажных работ, так как затруднено выполнение захватов грузов с пола снаклоном вперед в сигитальной плоскости и/или с приседанием, когда для того чтобы достать и подхватить груз с пола, необходимо изогнуть позвоночник дугой. Это связано с тем, что при таком изгибе должна была бы увеличиваться воображаемая длина дуги от пояса до плеч оборудования экзоскелета, которое, прилегая к телу, реально находится на некотором расстоянии от собственно изгибающегося позвоночника оператора, а значит и на большем радиусе от центра дуги изгиба, а в жестком каркасе это невозможно. По этой причине плечи будут с силой упираться в плечевые дуги, так что оператор в ряде случаев просто физически не сможет выполнить захват груза с пола.
В то же время, известен ряд технических решений для облегчения выполнения поворотов и частично наклонов путем внесения подвижности между жестким поясом и спинным каркасом.
Так, известен «Пассивный экзоскелет для поддержки спины и рук» по патенту ПМ 206503 (2021), представляющий собой достаточно жесткий, но тем не менее в некоторой степени податливый каркас, образованный жилетом, включающим грудной пояс, набедренным поясом и скрепляющей их между собой пластиной, обладающей упругостью в сигитальной плоскости. Известен также «Экзоскелет активный» по патенту ПМ 189468 (2018) в котором пояс, выполненный в виде коромысло-образной детали, подобной тазовым костям человека, посредством упругой рессоры спины, выполненной в виде плоской балки прямоугольного сечения, соединен с плечами, в свою очередь выполненными в виде пространственной детали, по форме, напоминающей отложенный ворот шубы, что вместе с грудными ремнями - стяжками образует податливый каркас. Вносимая таким образом подвижность существенно ограничена, т.к. упругие элементы должны обладать необходимой прочностью и быть достаточно жесткими чтобы воспринимать груз без стесняющих оператора деформаций. Понятно, что захват груза с пола в таких экзоскелетах также существенно затруднен.
Следующие технические решения направлены на увеличение подвижности оператора в экзоскелете за счет шарнирного соединения спинно-грудного каркаса с С-образным поясом, закрепленным на операторе в области таза. Этот подход реализован в ряде патентов таких как, например, ПМ 202205 и ПМ 190786.
Так в патенте «Экзоскелет для облегчения перемещения человеком груза» ПМ 202205 (2020) С-образный пояс состоит из трех жестких соединенных между собой частей - двух боковых дуг пояса и центрального «копчика», на котором устанавливается поясничный узел, содержащий двухстепенной шарнир и закрепленную на нем пластину поясничного узла с велкротканью. В свою очередь образованный Т-образной пластиной и плечевыми дугами с лямками для фиксации на торсе оператора жесткий каркас спины пристегивается к поясничной пластине по принципу «липучки». Такой способ соединения обеспечивает возможность учесть антропометрические особенности пользователей, а именно их рост. Такое конструктивное исполнение экзоскелета за счет наличия двух цилиндрических степеней подвижности обеспечивает возможность оператору совершать наклоны вправо-влево и поворачиваться вокруг вертикальной оси. Недостатком же является все та же, рассмотренная выше, стесненность оператора пользователя при наклонах вперед и приседании для захвата груза.
В патенте же «Пассивный грузовой экзоскелет» ПМ 190786 (2019) каркас экзоскелета состоит из спинной и поясничной частей, устанавливаемых на плечи и спину человека и фиксируемых поясом и плечевыми ремнями, а обе эти части соединены при помощи сферического шарнира, причем корпус сферического шарнира закреплен неподвижно на спинной части каркаса, палец шарнира шаровой частью установлен в корпусе шарового шарнира, а цилиндрическим концом жестко соединен с поясничной частью каркаса также в области копчика пользователя. Таким образом вместе с поворотами обеспечиваются наклоны спинной части каркаса относительно поясничной в любой плоскости, в том числе и в сагитальной, что важно для выполнения небольших наклонов вперед.
Кроме того, известен «Грузовой экзоскелет, спинной карданный узел и кольцевой кардан грузового экзоскелета» по патенту на изобретение №2 563 209 (2014), содержащий каркас с элементами крепления к туловищу с помощью лямок и поясного ремня. Каркас, в свою очередь, состоит из плечевого блока в виде Х-образно соединенных пластин, Г-образно изогнутых на концах, охватывающих плечи и грудь оператора, и С-образного пояса-коромысла, изогнутого по форме поясничной области тела человека, которые соединены между собой спинным карданным узлом посредством двух опорных площадок. Спинной карданный узел представляет собой две трубки, соединенные между собой крестовым карданом, диаметр которого равен диаметру трубок. На трубки карданного узла с небольшим натягом, не мешающим ему перемещаться на трубках, установлен трубчатый фиксатор с рифлением на внешней стороне для предотвращения скольжения руки оператора при перемещении фиксатора по трубкам. На противоположных концах трубок установлены заглушки и крепежные опорные площадки, причем конец одной из трубок вставляется в опорную площадку и фиксируется в ней винтом через резьбовое отверстие в заглушке, что позволяет карданному узлу вращаться вокруг своей оси относительно корпуса (опорной площадки), что обеспечивает оператору возможность поворачиваться вокруг вертикальной оси. Каркас скомпонован так, что крестовой кардан расположен в области верха поясничного отдела (в зоне соединения с грудным), что при поднятом фиксаторе обеспечивает более комфортное выполнение любых наклонов в данном экзоскелете по сравнению с рассмотренными выше вариантами, у которых шарниры расположены в области крестца. В то же время, заложенная функция ручной фиксации-расфиксации карданного шарнира существенно усложняет конструкцию и изготовление экзоскелета, а также затрудняет работу в нем, так как требует точного согласования осей трубок кардана путем точного выравнивания наклонов плеч, груди, поясницы и таза оператора для беспрепятственного перемещения трубчатого фиксатора. При этом, экзоскелетам с введенными вконструкцию шарнирами также присущ недостаток, заключающийся в рассмотренной выше существенной стесненности оператора при наклонах вперед и приседании для захвата груза, что ограничивает функциональность оператора в таких экзоскелетах при проведении такелажных работ.
Таким образом, для всех рассмотренных выше экзоскелетов присущ биомеханически обусловленный общий недостаток - стесненность наклонов, выражающаяся в том, что плечи оператора упираются в каркас из-за того, что при наклонах жесткие каркасы, находясь на некотором расстоянии от позвоночника, даже с шарнирами, как бы отстают по длине от наклона тела вперед по дуге «на шарнирах» межпозвоночных дисков и сопровождающегося к тому же распрямлением анатомических изгибов позвоночника.
Следующим шагом в ряду технических решений, направленных на достижение большей подвижности оператора, и наиболее близким к заявляемому изобретению аналогом, принятым за прототип, является «Экзосклет и способ его использования» по патенту на изобретение №2 696 631(2015), который является пассивным и содержит по меньшей мере три взаимосвязанные секции: секцию туловища, секцию тазобедренного сустава и секцию нижних конечностей. В свою очередь, секция туловища, являющаяся функционально и называемая в ряде случаев, как, например, в ПМ 202 567 модулем спины, включает плечевой элемент, выполненный с возможностью частично охватывать шею пользователя и содержит два крылообразных удлинения над плечами и позвоночный узел, подобный позвоночнику человека и включающий в себя ряд отдельных позвоночных элементов - позвонков с боковыми фигурными выступами. Тазобедренная секция, представляющая собой жесткий С-образный пояс, который содержит жесткие центральный нижний спинной крестцовый элемент и два, шарнирно соединенных с ним правого и левого тазобедренных элемента с поясными ремнями с защелками, причем внутренняя поверхность этих элементов покрыта упругим материалом для комфорта пользователя. Позвоночный узел скреплен с жилетом посредством текстильных петель, охватывающих боковыевыступы позвонков, причем жилет непосредственно примыкает к телу оператора и с помощью наплечных лямок, нагрудной сетки и грудных лямок позвоночный узел крепится к туловищу пользователя. В свою очередь, плечевой элемент, все позвонки и нижний спинной элемент последовательно соединены между собой при помощи упругих элементов и стянуты воедино с помощью двух тонких податливых эластичных элементов - тяг, проходящих сквозь специальные сквозные отверстия в позвонках, одними концами закрепленных вверху на плечевом элементе, а другие концы после натяжения вручную для смыкания позвонков закрепляются на нижнем спинном элементе. Каждый межпозвонковый упругий элемент содержит внутренние телескопические пружины, межпозвонковые пружины и сферический межпозвонковый контакт, который сомкнут в положении выпрямленного позвоночного узла и разомкнут при наклонах больше 10°. При этом длина позвоночного узла увеличивается вслед за увеличением дуги поверхности спины над остистыми отростками позвонков к которой прилегает позвоночный узел согласованно с наклоном позвоночника за счет взаимного наклона позвонков относительно центров поворота межпозвоночных дисков. При удлинении позвоночного узла его позвоночные элементы (позвонки) смещаются друг относительно друга, межпозвонковые сферические контакты размыкаются, пружины разжимаются, эластичные тяги упруго удлиняются, а внутренние телескопические трубчатые контакты внутри позвонков сохраняются, обеспечивая целостность узла и его возврат в исходное положение при распрямлении позвоночника оператора.
Основным недостатком рассмотренного экзоскелета-прототипа, а именно его составной части - секции туловища, функционально являющейся модулем спины, является его неспособность разгрузить позвоночник и мышцы спины от дополнительных нагрузок при распрямлении спины с грузом после захвата его с пола при наклоне или приседе, вследствие размыкания силовой цепи передачи нагрузки от груза по силовому конструктиву экзоскелета на землю, так как в позвоночном узле при наклоне в сагитальной плоскостиисчезает силовое контактное взаимодействие плечевого элемента с первым позвоночным элементом, последующих позвоночных элементов между собой и последнего позвонка с тазобедренной секцией.
К конструктивным же недостаткам можно отнести высокую сложность межпозвоночных узлов с большим числом малоразмерных элементов, сложность изготовления, сборки и ремонта, малую площадь сферических контактных площадок и, как следствие, высокие контактные напряжения при работе с грузами, что приводит к снижению надежности позвоночного узла при его низкой ремонтопригодности. При этом отсутствует возможность адаптации модуля спины экзоскелета к антропометрическим параметрам, в частности, росту пользователя, а также в конструкции плечевого элемента не предусмотрена возможность установки дополнительного оборудования, например, для разгрузки рук, которое, в свою очередь, может рассматриваться в качестве модуля экзоскелета верхних конечностей.
Задачами предлагаемого изобретения являются:
- обеспечение разгрузки позвоночника и мышц спины во время выполнения такелажных работ, особенно при подъеме тяжелых и/или объемных предметов с пола, при выполнении рабочих операций с инструментом в статичной позе при сохранении подвижности пользователя в экзоскелете во время ходьбы, а также при выполнении монтажных или сборочных операций,
- упрощение конструкции модуля спины экзоскелета, -повышение надежности позвоночного узла,
- обеспечение возможности адаптации модуля спины к антропометрическим параметрам пользователей,
- обеспечение возможности установки на модуль спины дополнительного оборудования.
Задача обеспечения разгрузки позвоночника и мышц спины при сохранении подвижности оператора в экзоскелете решается за счет того, что вактивный модуль спины экзоскелета, содержащий грудо-плечевой каркас, закрепляемый на плечевом поясе (плечах) и груди оператора с помощью системы ремней, позвоночный узел, проходящий от грудо-плечевого каркаса вниз вдоль позвоночника оператора и включающий ряд связанных между собой и последовательно опирающихся друг на друга позвоночных элементов - позвонков, и жесткий С-образный пояс с двумя поясными ремнями с защелками, который содержит центральный крестцовый элемент, причем самый верхний позвонок шарнирно соединен с грудо-плечевым каркасом, а самый нижний позвонок шарнирно соединен с центральным крестцовым элементом пояса, дополнительно включен тяговый привод фиксации-расфиксации позвоночного узла. Привод натягивает или прослабляет тягу, одним концом прикрепленную в сборе к крестцовому элементу пояса, проходящую внутри позвоночного столба и прикрепленную вторым подвижным концом к шкиву тягового привода вращательного типа, закрепленного в собранном виде на грудо-плечевом каркасе. Это обеспечивает активный перевод модуля спины приводом по команде оператора из расслабленного состояния в состояние целостного жесткого каркаса с одновременным распрямлением, принудительным или совместно с мышцами спины, изогнутого (для захвата груза) позвоночника оператора для принятия им биомеханически обусловленной формы, благоприятной для поднятия груза, в которой основная нагрузка от веса груза воспринимается, минуя опорно-двигательную систему оператора, например, активными приводами тазобедренных шарниров экзоскелета между поясом и бедренными звеньями нижних конечностей.
В то же время, обеспечение способности активной фиксация формы модуля спины вблизи торса оператора в статичной позе, которую он принял для удобства работы с инструментом, например, с некоторым разворотом торса в сторону рабочей зоны, также способствует разгрузке опорно-двигательного аппарата и снижает утомление оператора, что продлевает время непрерывного выполнения рабочей операции до смены позы для отдыха задействованных вработе мышечных групп с последующим возвратом к продолжению выполнения операции, что повышает эффективность работы и производительность труда оператора.
Таким образом, можно говорить, что предложенный модуль спины приобретает новое качество и может рассматриваться как активный модуль спины экзоскелета. При этом источник энергии, необходимый для работы привода фиксации позвоночного узла, входит в состав экзоскелета, а управление работой привода активного модуля спины осуществляется системой управления экзоскелета в целом.
Задача упрощения конструкции модуля спины решается за счет того, что
- позвонки выполнены в виде прямой призмы, преимущественно с основанием близким к треугольнику, причем на верхних и нижних поверхностях позвонков выполнены согласованные по размерам и взаимному расположению три образованные выступами и вкладышами контактные зоны, расположенные в углах равнобедренного треугольника, основание, большая сторона которого расположена со стороны позвоночника оператора, при этом на одной из поверхностей позвонка выполнены три опорных цилиндрических выступа с шарообразной контактной поверхностью, а на противостоящей поверхности соседнего позвонка напротив каждого выступа размещена ответная плоская контактная площадка, установленная в углублении заподлицо в виде жесткого цилиндрического вкладыша с высоким коэффициентом трения, причем на поверхности с цилиндрическими выступами концентрично им установлены кольцевые тороидальные эластичные элементы, при этом жесткость контактной зоны выступ-вкладыш выше жесткости на сжатие эластичных элементов; а высота эластичных элементов выше чем высота опорного контактного выступа.
- в теле позвонков на линии, проходящей через центры двух опорных зон, образующих основание опорного треугольника симметрично относительно ее середины перпендикулярно его верхней и нижней поверхностям выполненычетыре сквозных отверстия, в которых установлены цилиндрические вставки из антифрикционного материала, вдоль оси по центру которых выполнены конусообразные сквозные отверстия, имеющие форму двойного конуса, подобную песочным часам, с круговым отверстием в центре, - в теле позвонков перпендикулярно его верхней и нижней поверхностям выполнено конусообразное сквозное отверстие, подобное песочным часам, с центральным круговым отверстием, расположенное на расстоянии от основания в диапазоне от 0,3 до 0,6 высоты опорного треугольника, построенной к его основанию;
В то же время, в верхнем и нижнем позвонках на их боковых сторонах в плоскости, перпендикулярной опорным поверхностям и проходящей через основание опорного треугольника параллельно линии основания опорного треугольника, выполнены два соосных цилиндрических отверстия с вмонтированными в них подшипниками в которых установлены две соосных цапфы закрепленные на установочных пластинах, которые в свою очередь закрепляются, соответственно, на верхней и нижней крепежных пластинах, выполненных по центру на задней стороне грудо-плечевого каркаса и на центральной крестцовой части пояса модуля спины с возможностью смещения установочных пластин в направлении вверх - вниз вдоль соответствующих крепежных пластин, на которых выполнены последовательные отверстия, соответствующие по конфигурации крепежным отверстиям на установочных пластинах; причем тяговый привод установлен непосредственно на верхней крепежной пластине. Также на верхней установочной пластине установлен один цилиндрический опорный выступ, образующий контактную пару, расположенную в вершине опорного треугольника с ответной плоской контактной площадкой, расположенной на верхней поверхности верхнего позвонка, а на нижней установочной пластине установлена контактная площадка, образующая контактную пару расположенного в вершине опорного треугольника с опорным выступом на нижней поверхности нижнего позвонка. Вместе с тем, в установочных пластинах соосно отверстиям в позвонкахвыполнены сквозные отверстия для прохождения сквозь них тяги привода, а на нижней установочной пластине закрепляется неподвижный конец тяги.
При этом на нижнем позвонке в двух средних конусообразных отверстиях антифрикционных вставок закреплены два направленных вверх прямолинейных упругих цилиндрических установочных прутка круглого сечения, а на верхних позвонках в двух крайних конусообразных отверстиях вставок закреплены два направленных вниз прямолинейных упругих цилиндрических круглых прутка, причем длина прутков лежит в диапазоне от 0,8 до 1,0 суммарной длины всех, включая верхние и нижние, позвонков позвоночного узла, а диаметр прутков, меньше диаметра отверстий центральных отверстий конусообразных вставок.
Задача повышения надежности позвоночного узла решается за счет увеличения числа контактных зон до трех при существенном увеличении радиуса контактных поверхностей опорных выступов, что существенно снижает уровень контактных напряжений.
Задача обеспечения возможности адаптации модуля спины к антропометрическим параметрам пользователей решается за счет смещения перед их закреплением установочных пластин вдоль грудо-спинного каркаса и крестцовой части пояса, для чего на них выполнены центральные верхняя и нижняя приемные пластины с системой крепежных отверстий, согласованных с отверстиями на установочных пластинах, а также за счет изменения числа позвонков, что позволяет достаточно просто изменять общую высоту модуля спины экзоскелета.
Задача обеспечения возможности установки на модуль спины дополнительного оборудования решается за счет того, что на грудо-плечевом каркасе со стороны спины в области лопаток оператора справа и слева от верхней приемной пластины и позвоночного узла выполнены две пластины с системой крепежных отверстий.
Сущность изобретения поясняется следующими рисунками и чертежами.
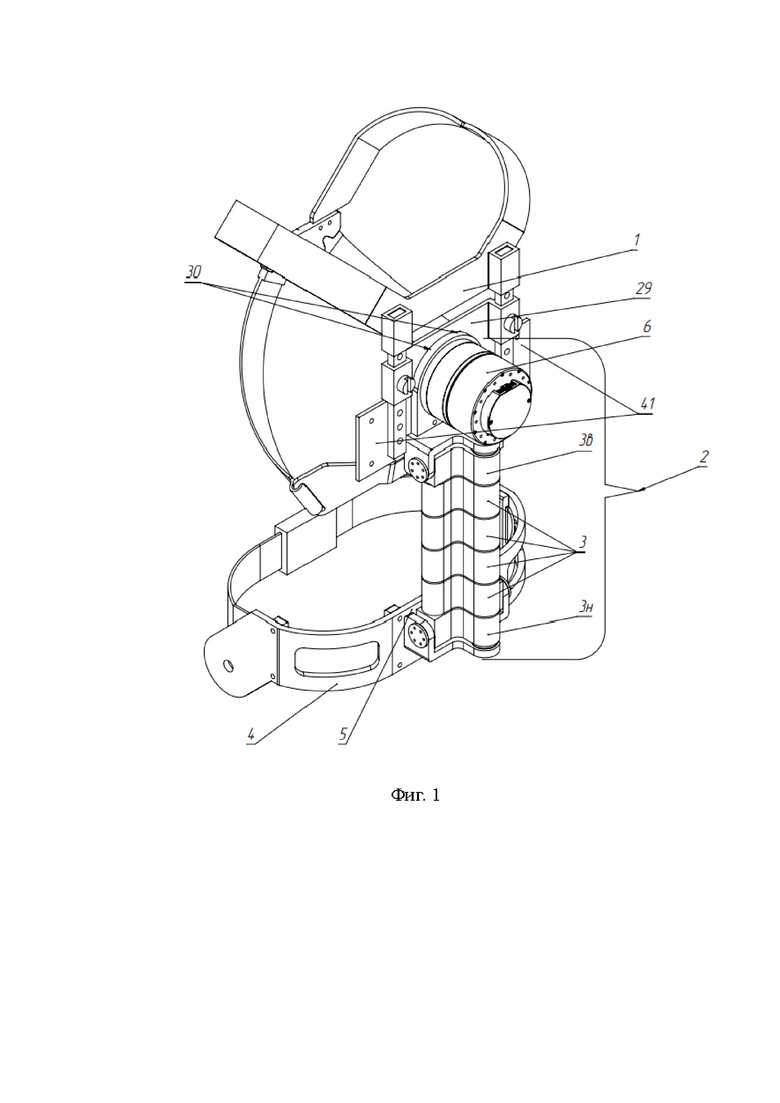
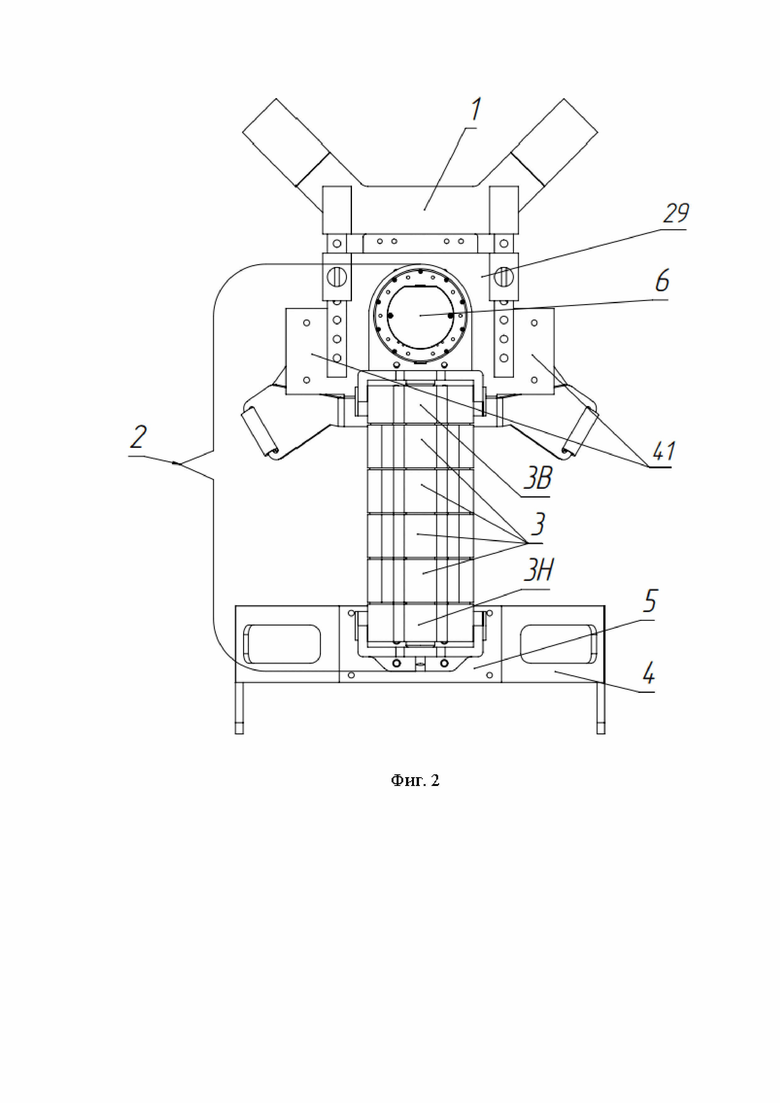
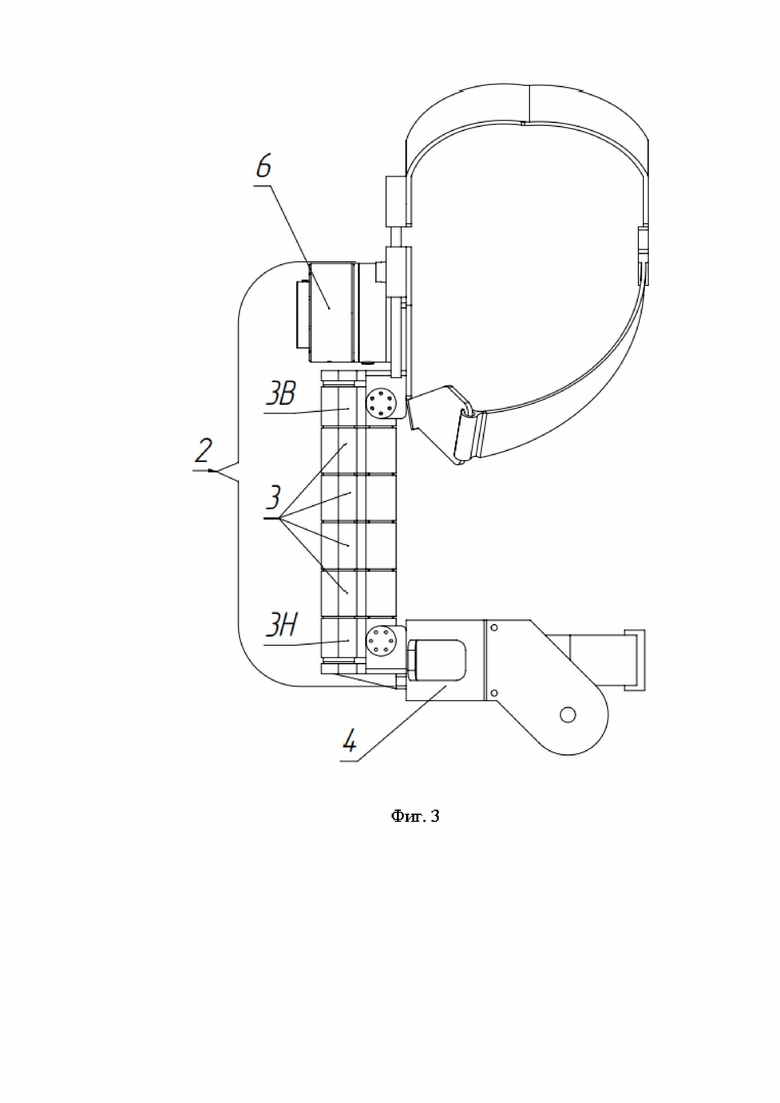
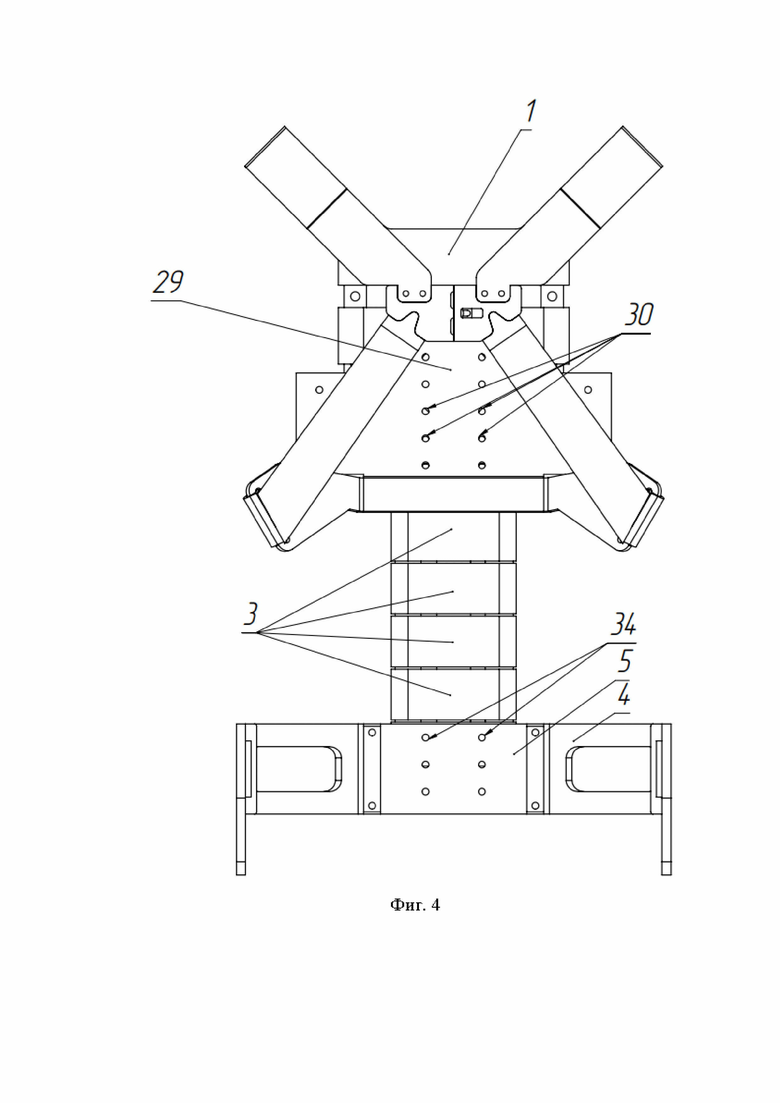
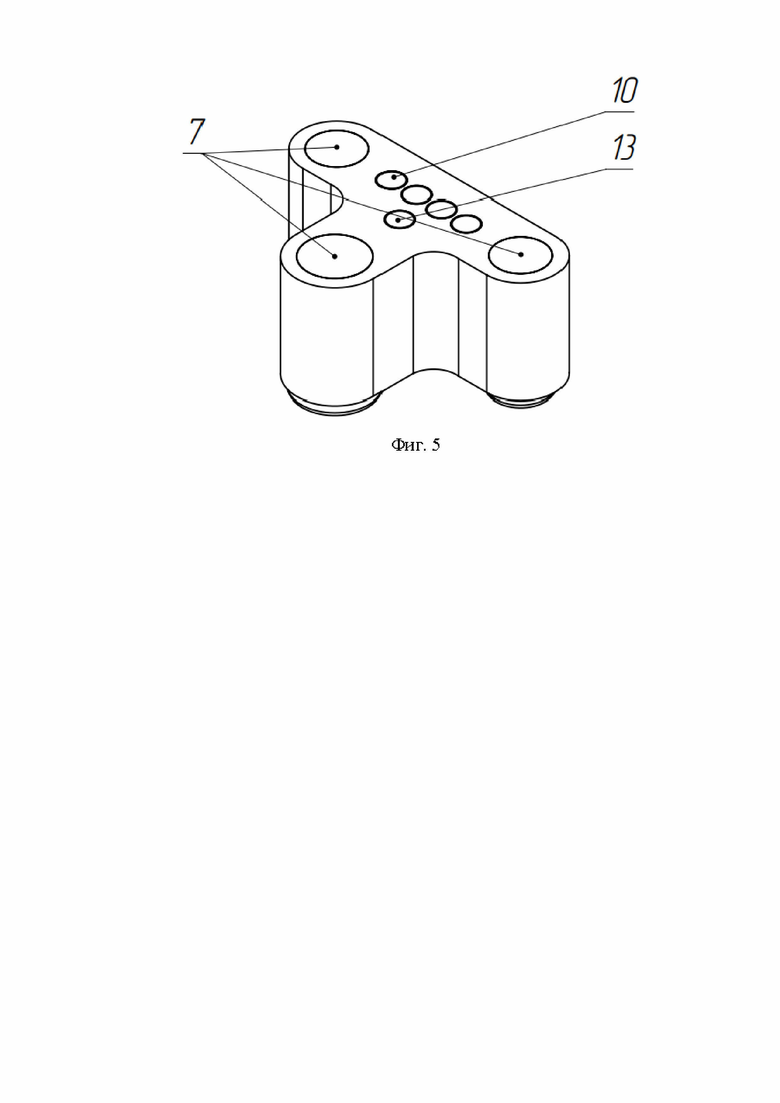
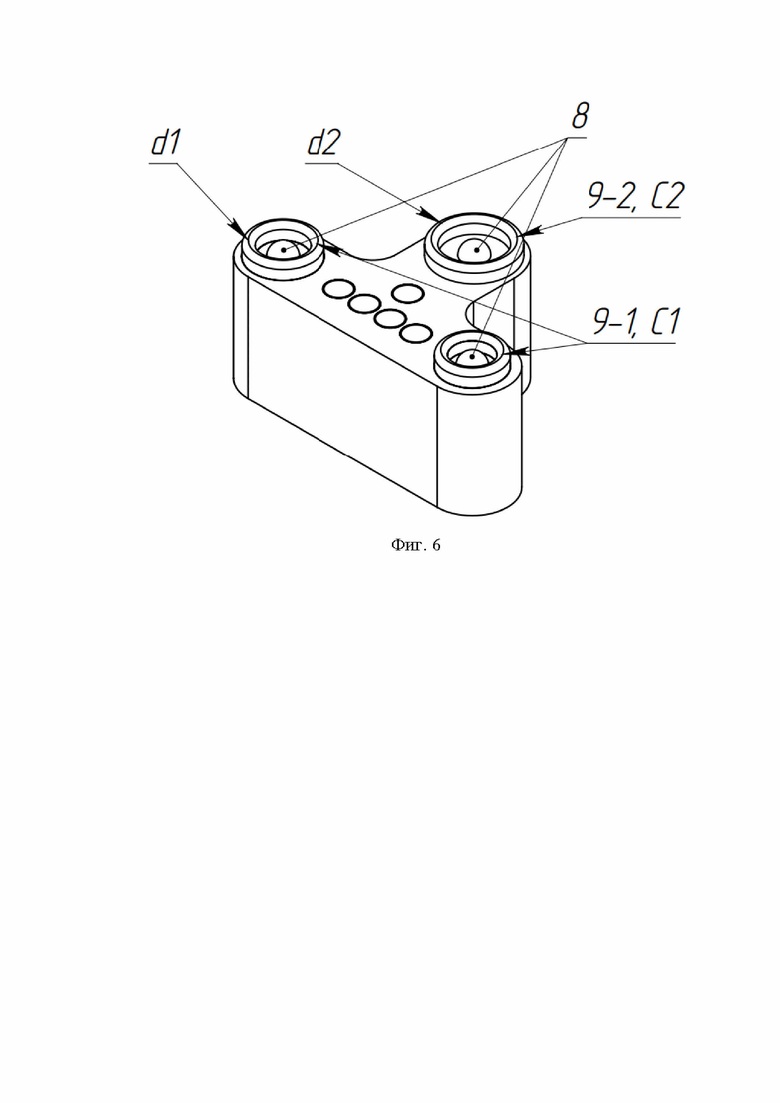
На фиг. 1 показан активный модуль спины в аксонометрии. На фиг. 2 показан активный модуль спины, вид сзади. На фиг. 3 показан активный модуль спины, вид сбоку. На фиг. 4. показан активный модуль спины, вид спереди (изнутри) На фиг. 5 показан промежуточный позвонок в аксонометрии. На фиг. 6 показан промежуточный позвонок в аксонометрии, перевернут.
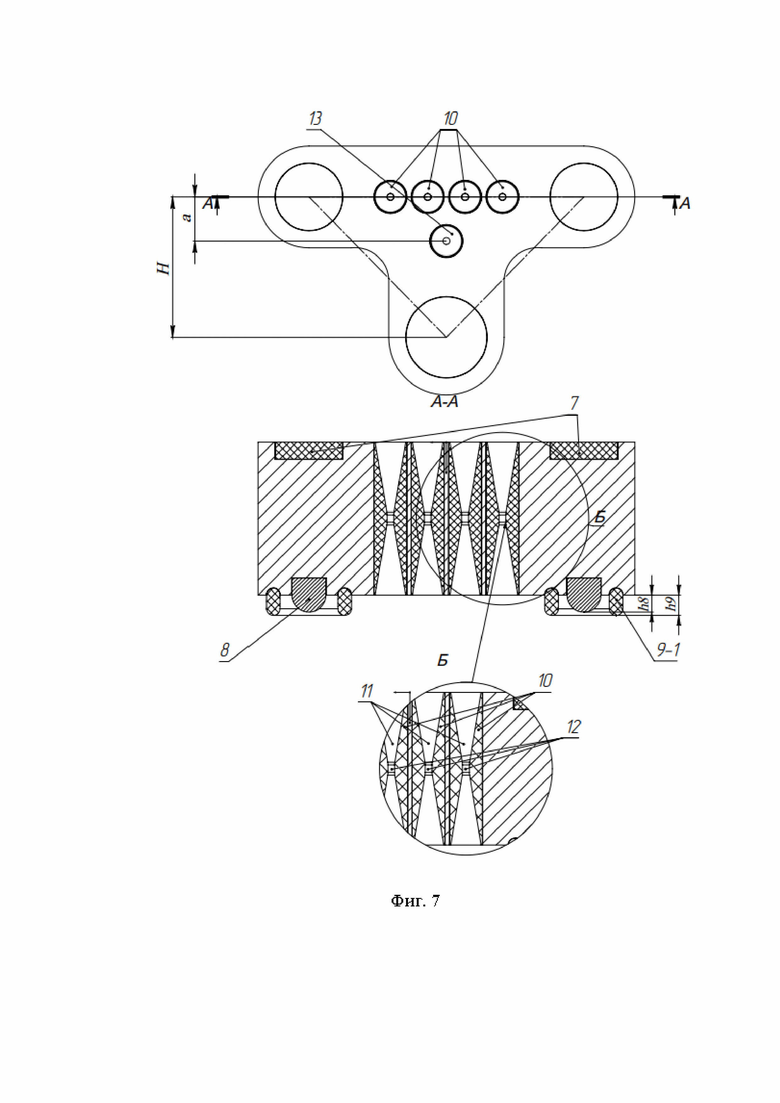
На фиг. 7 показан позвонок в разрезе.
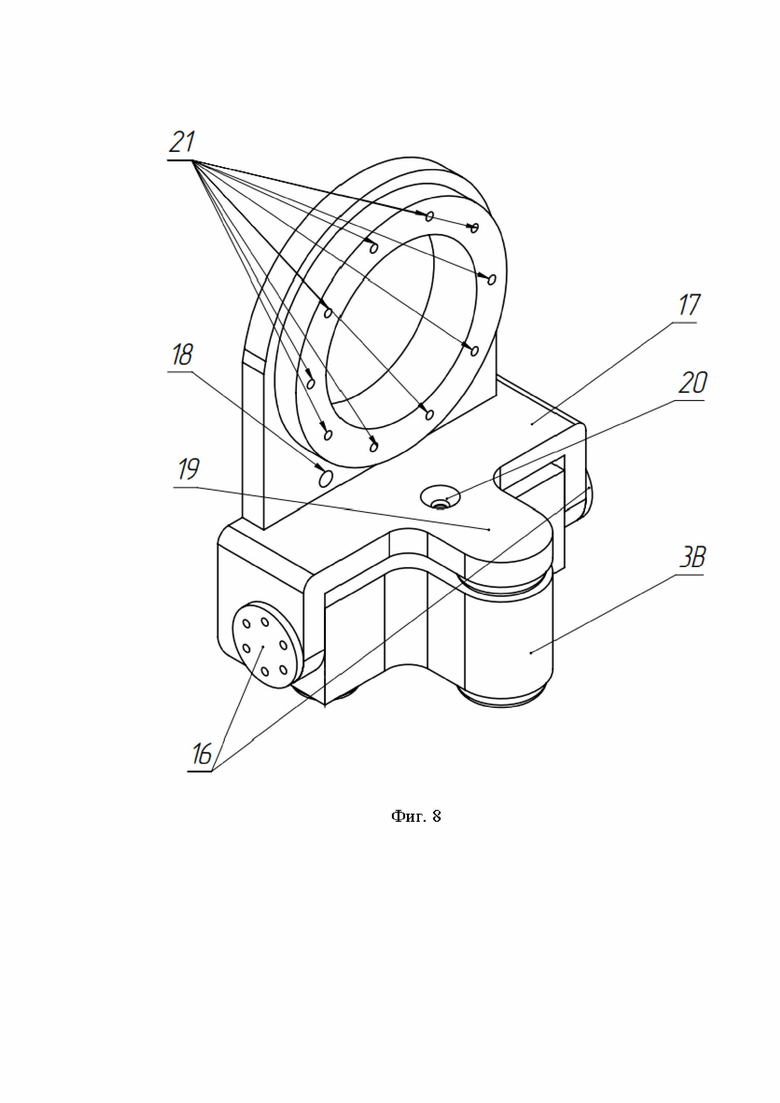
На фиг. 8 показан верхний позвонок в сборе с верхней установочной пластиной в аксонометрии.
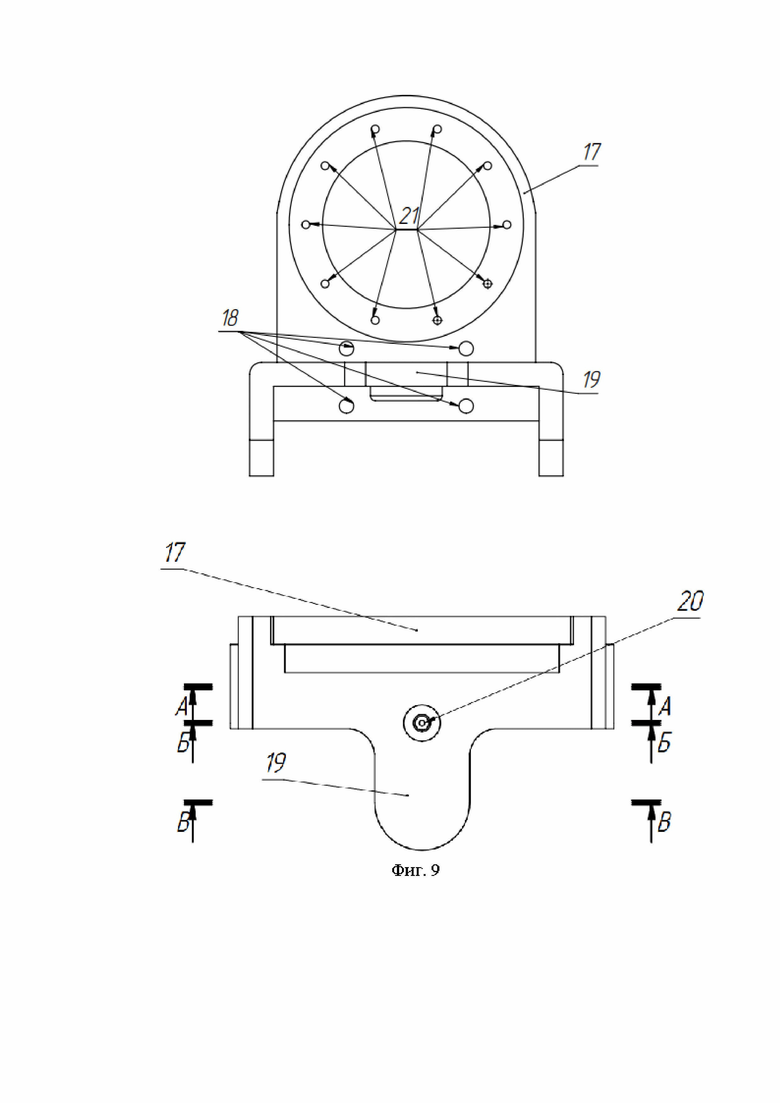
На фиг. 9 показана верхняя установочная пластина, виды спереди и сверху.
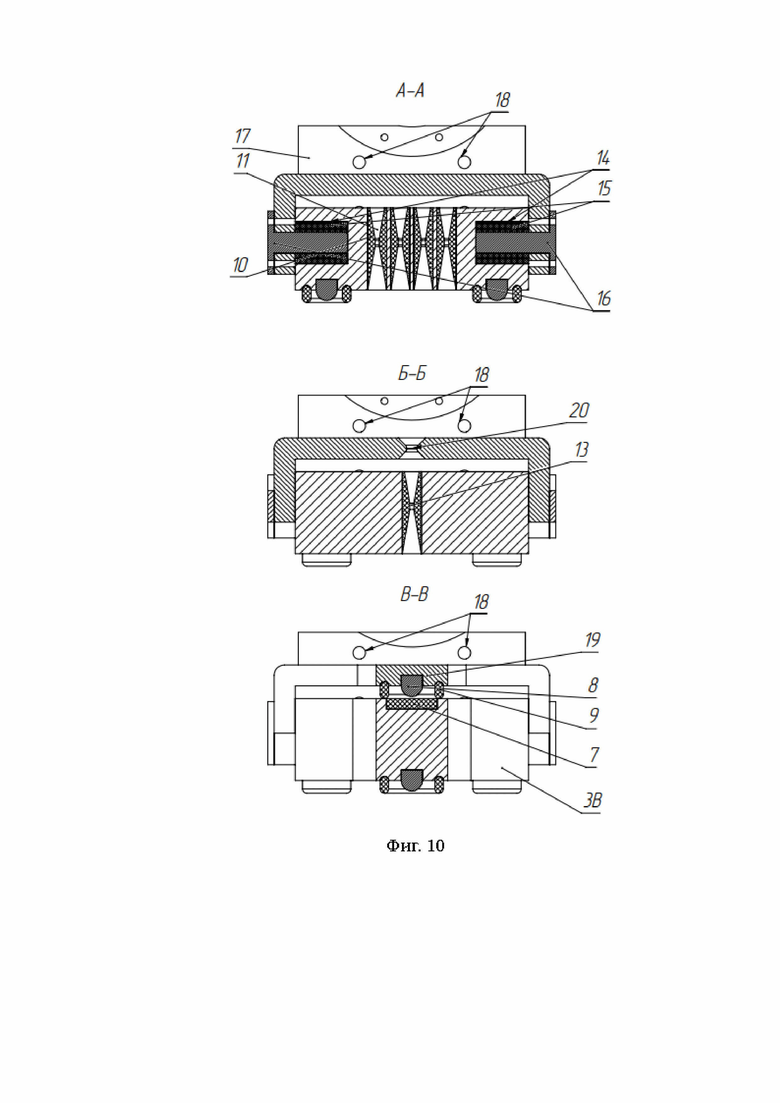
На фиг. 10 показаны разрезы сборки верхнего позвонка с верхней установочной пластиной.
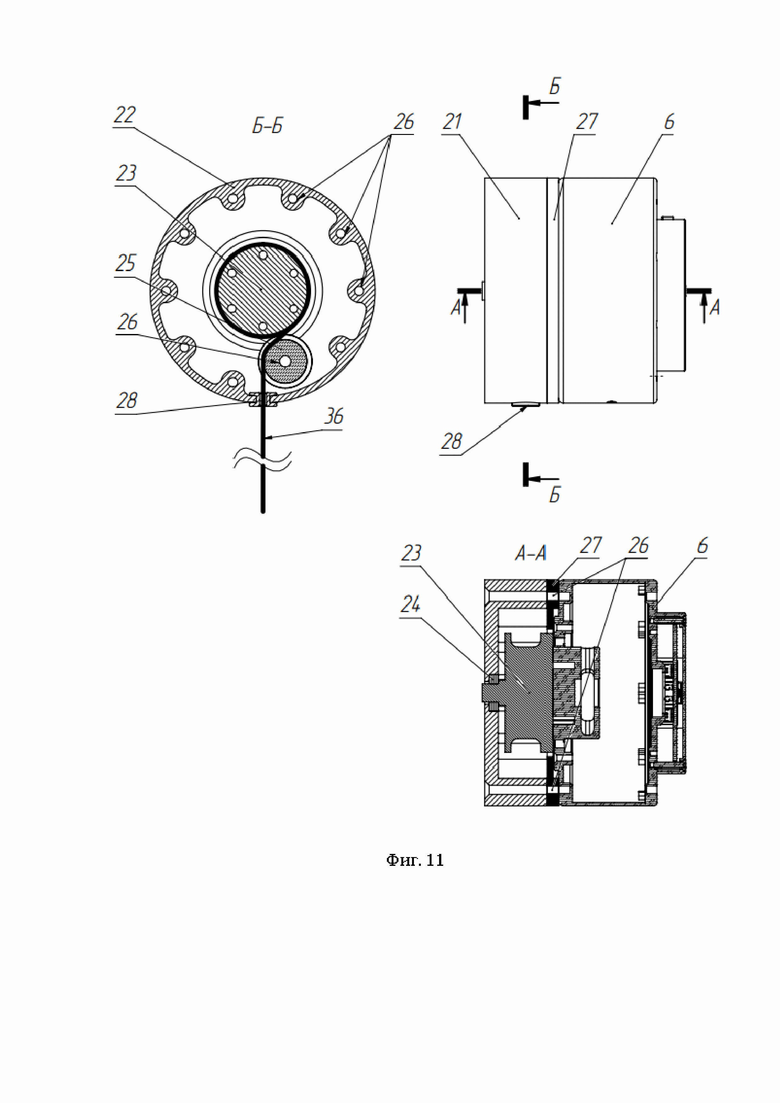
На фиг. 11 показан блок натяжителя с корпусом и приводом с поперечными разрезами
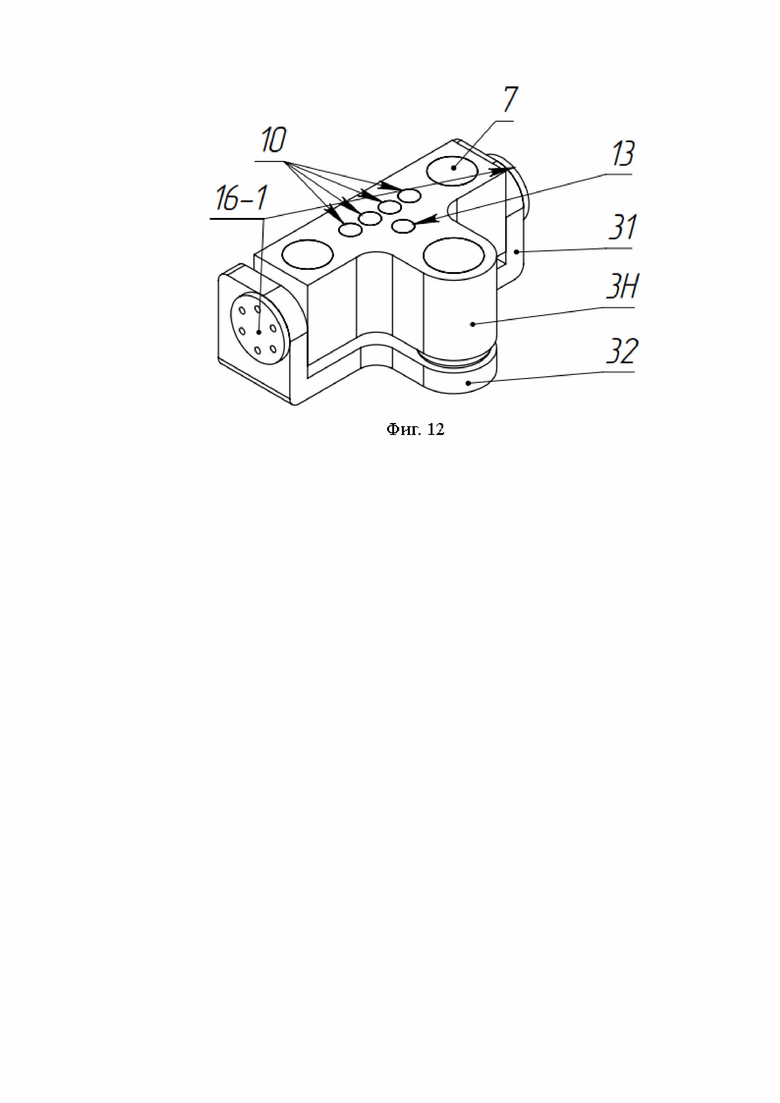
На фиг. 12 показан нижний позвонок в сборе с нижней установочной пластиной в аксонометрии.
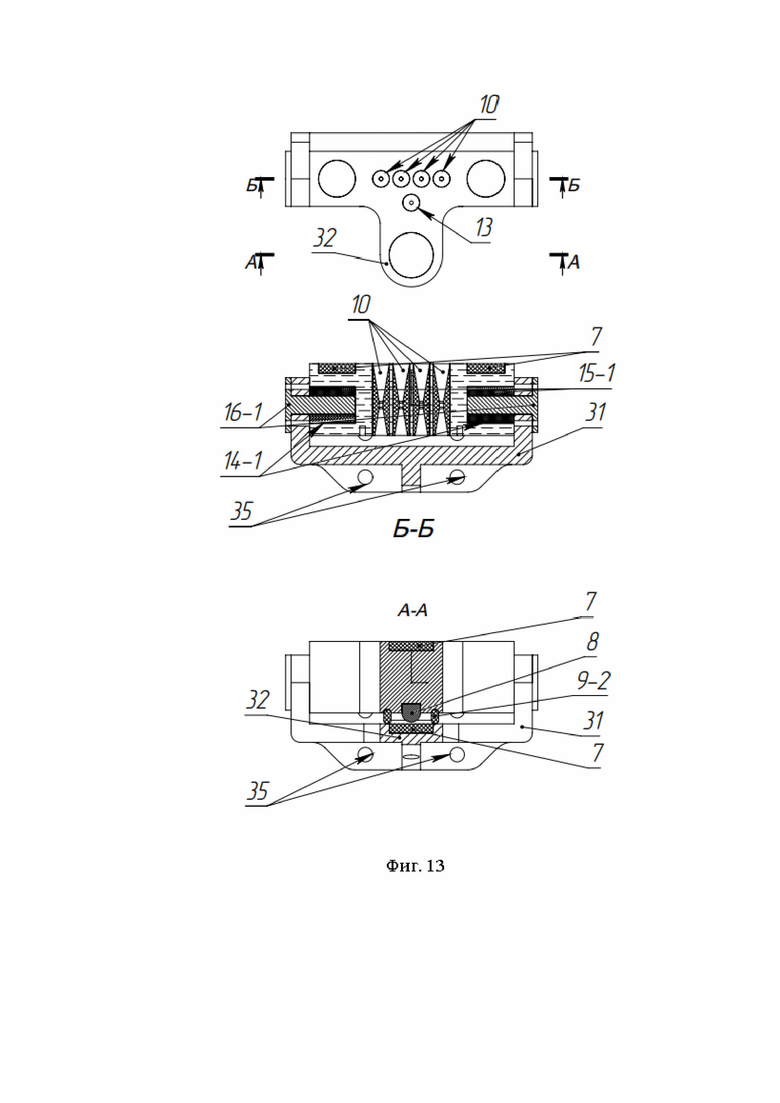
На фиг. 13 показан разрезы нижнего позвонка в сборе с нижней установочной пластиной.
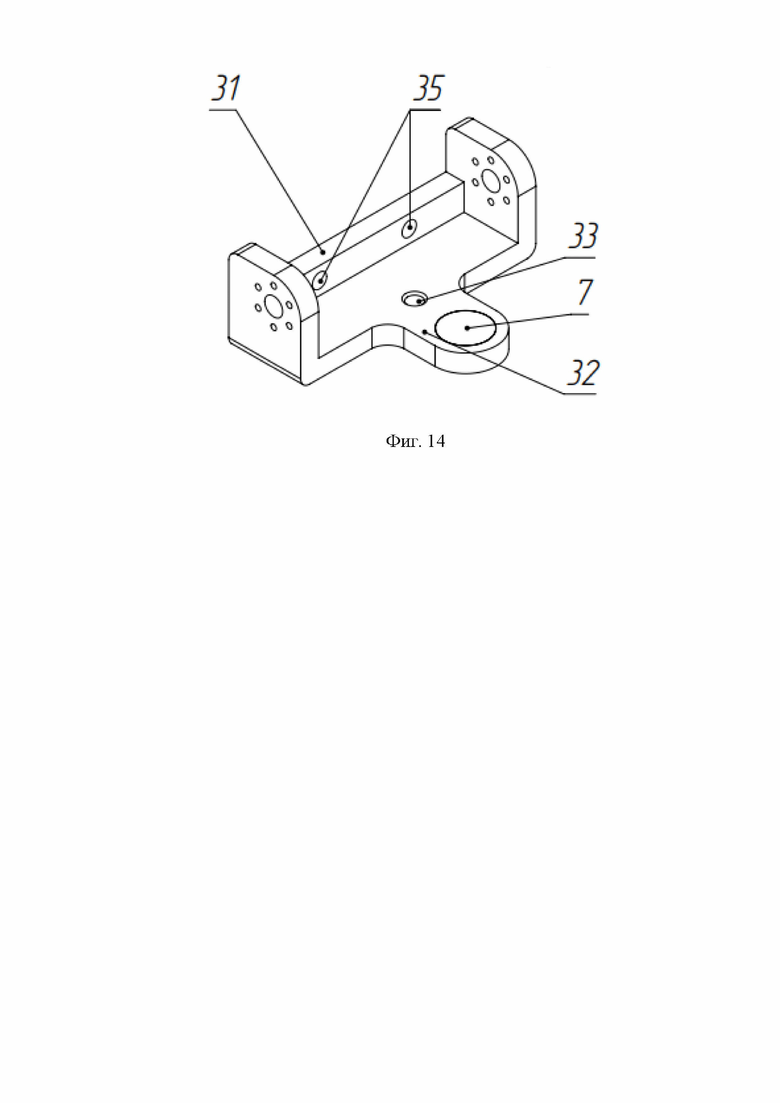
На фиг. 14 показана нижняя установочная пластина в аксонометрии.
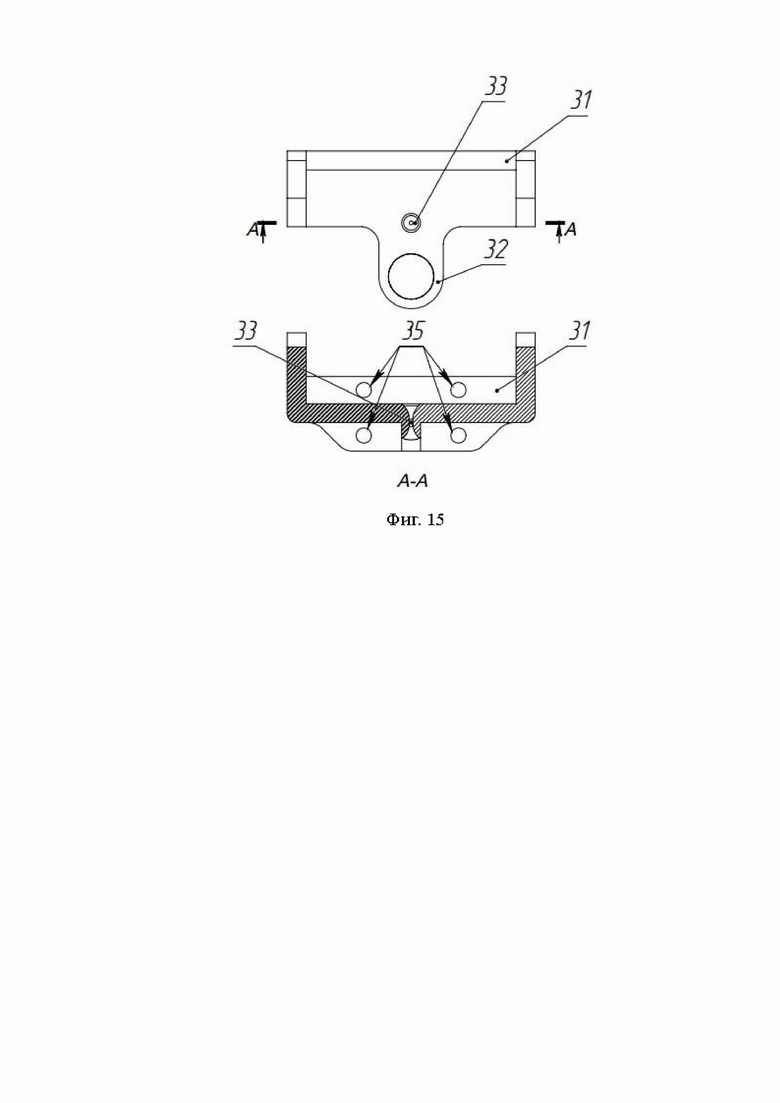
На фиг. 15 показан разрез нижней установочной пластины.
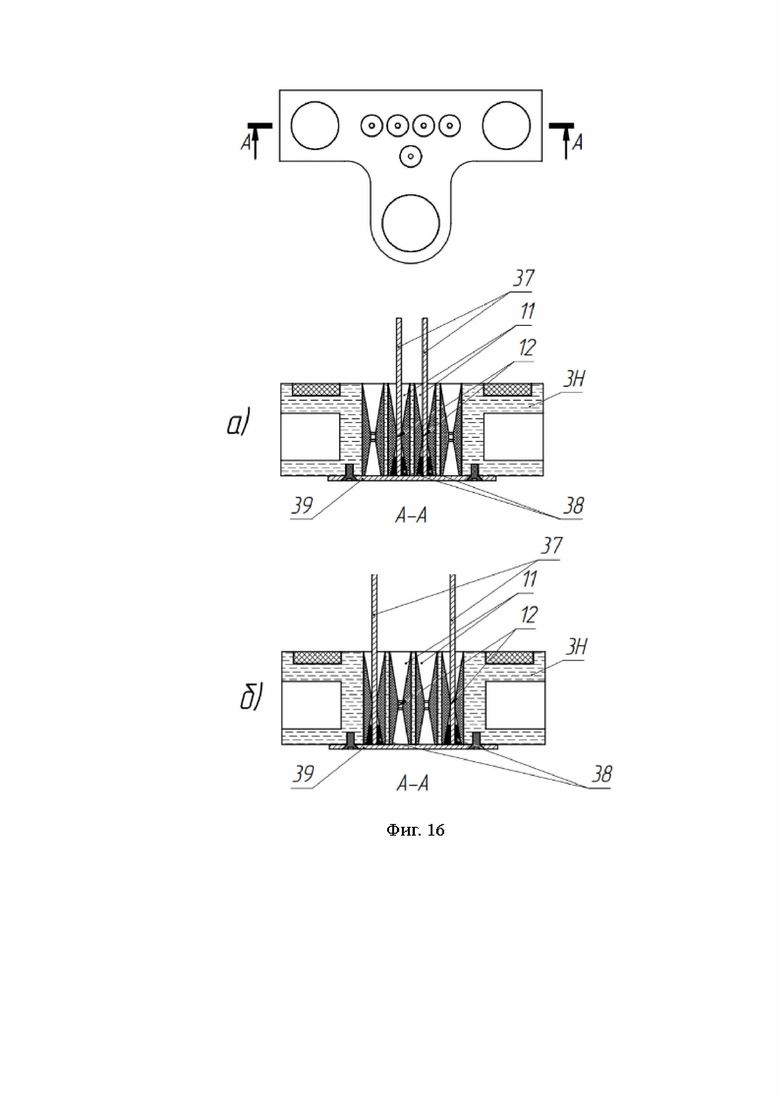
На фиг. 16 показан способ установки упругих стержней на нижнем позвонке.
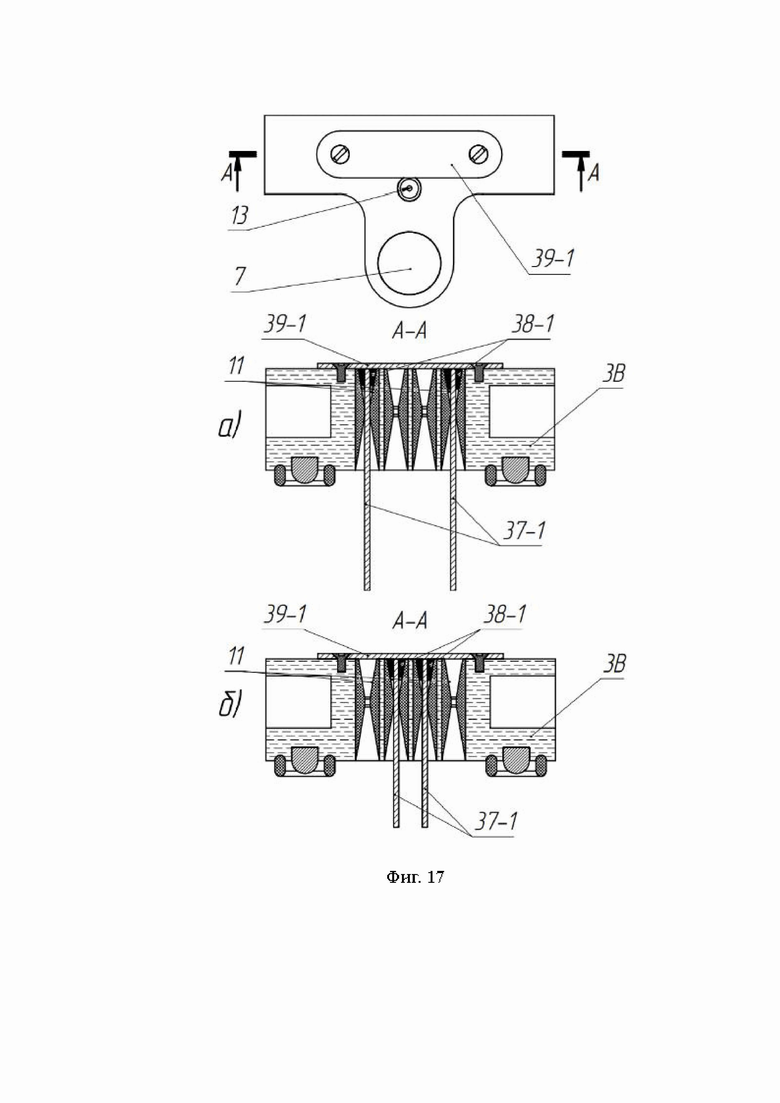
На фиг. 17. показан способ установки упругих стержней на верхнем позвонке.
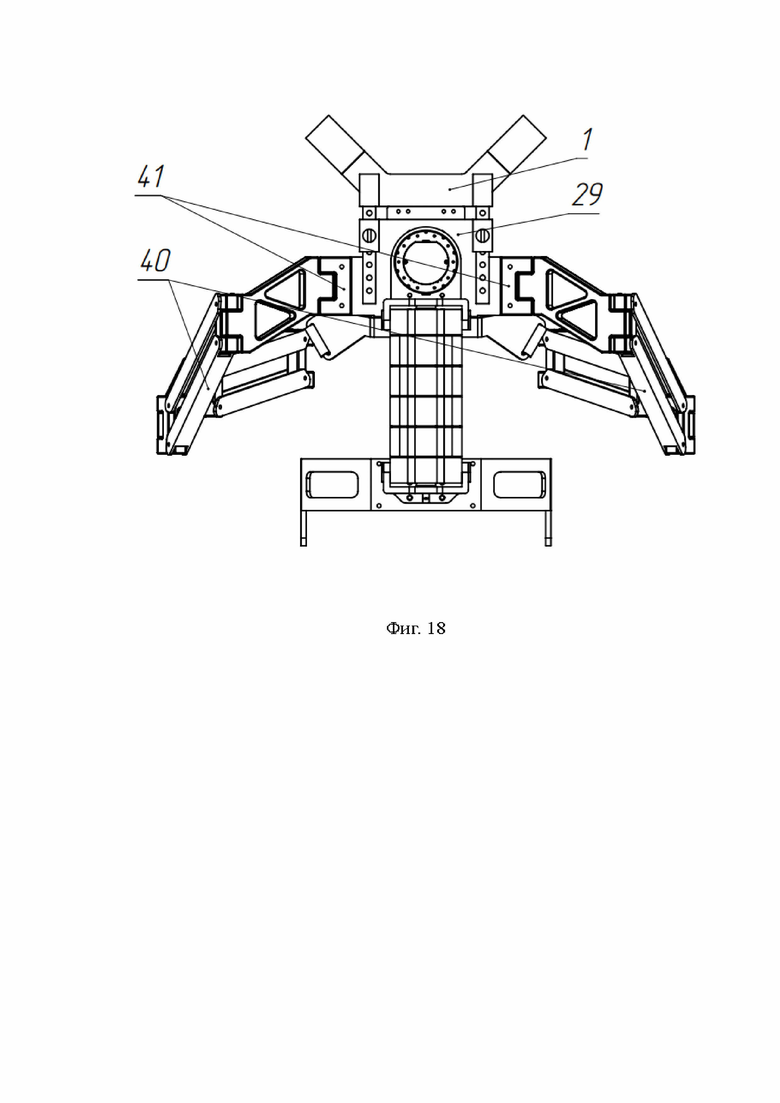
На фиг. 18. показан способ закрепления дополнительного оборудования на верхней приемной пластине, вид сзади
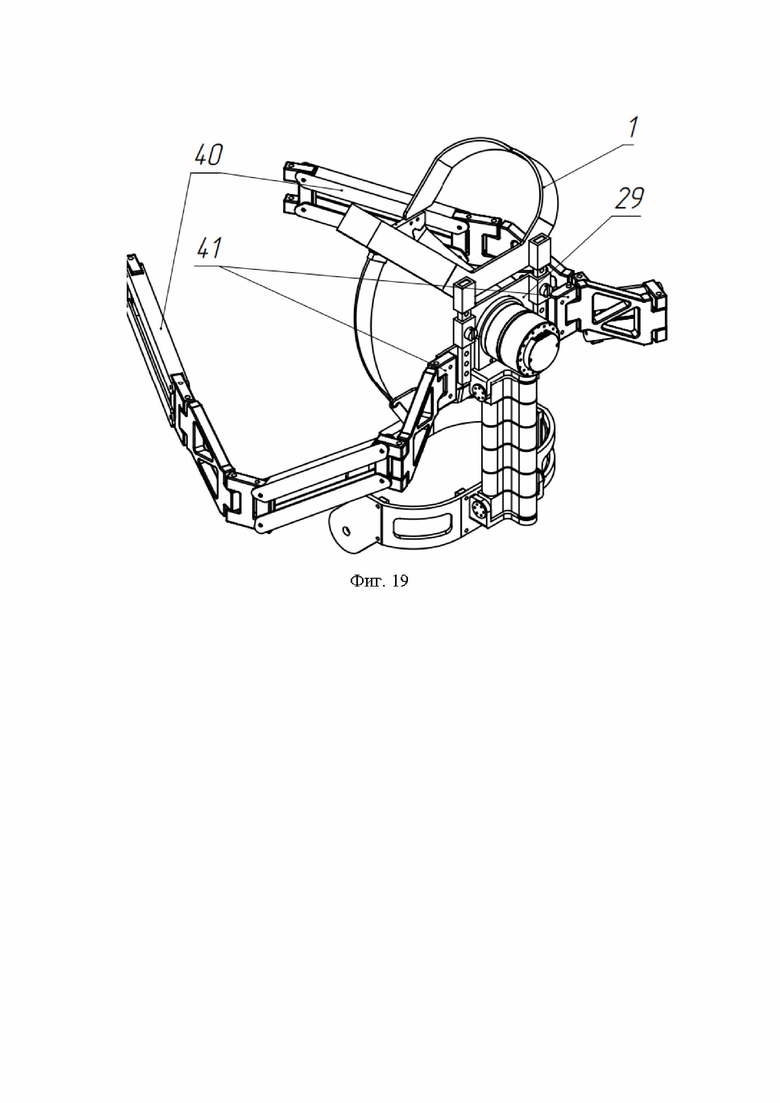
На фиг. 19 показан способ закрепления дополнительного оборудования на верхней приемной пластине, аксонометрия
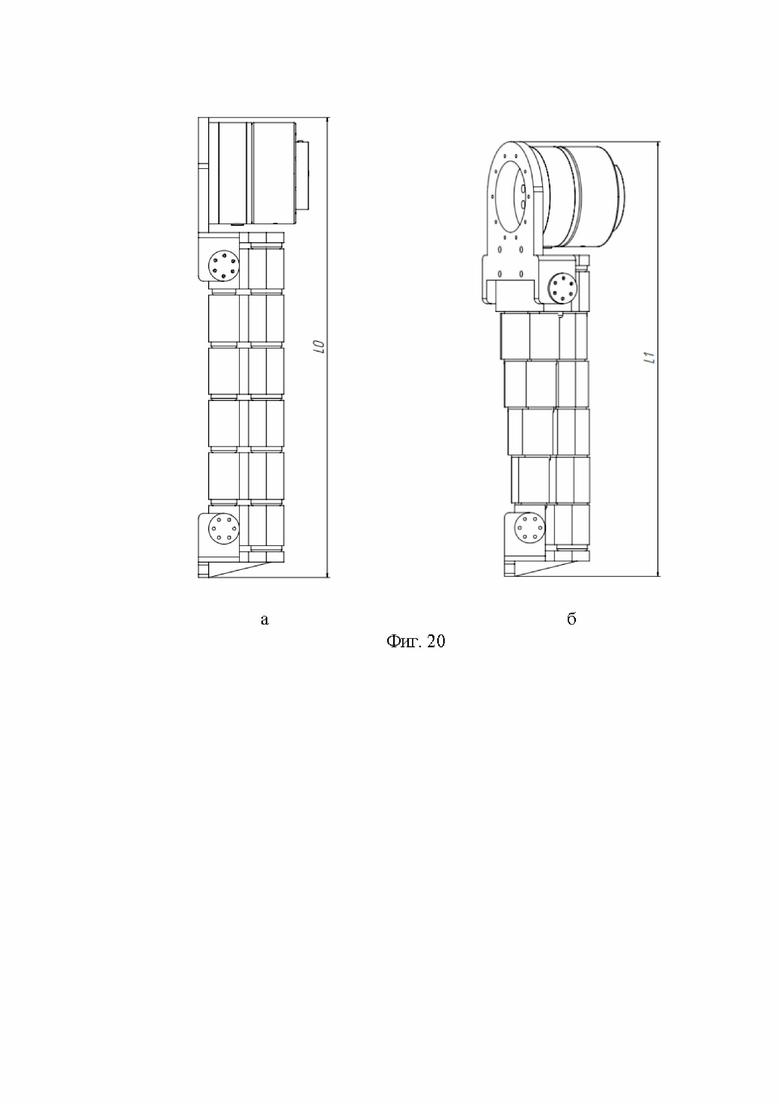
На фиг. 20 схематично показан позвоночный узел в процессе работы при фиксации поворота стоя.
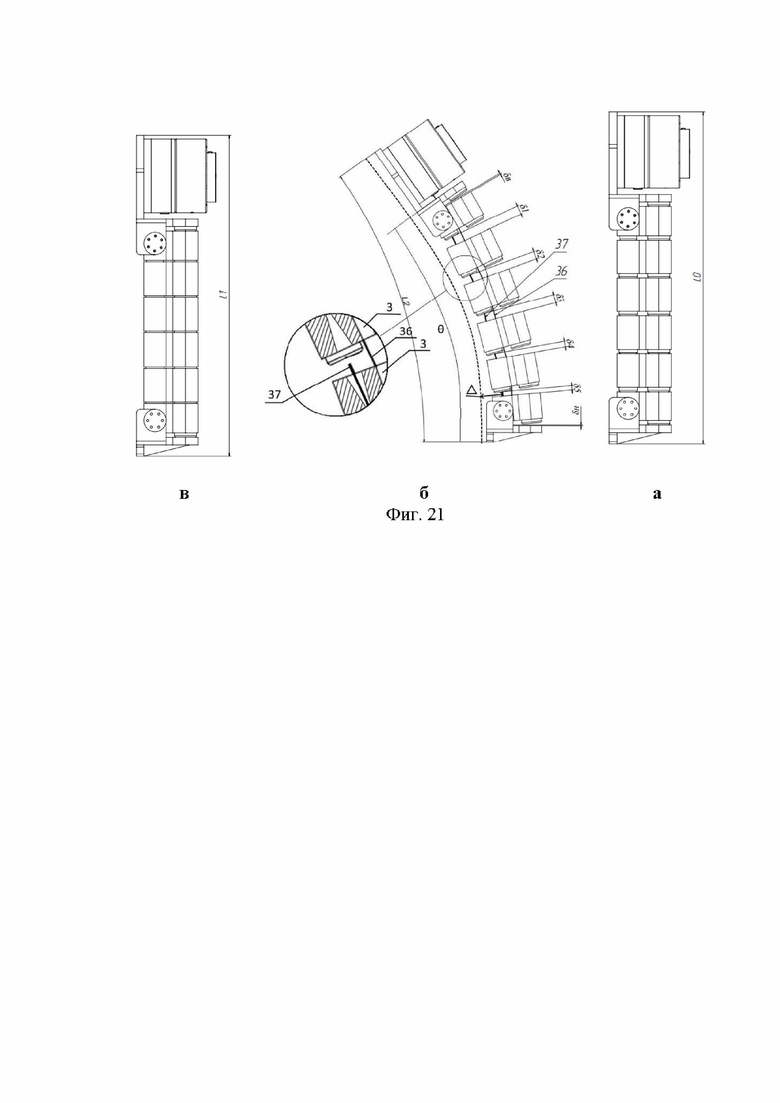
На фиг. 21 схематично показан позвоночный узел в процессе работы при наклоне и распрямлении с фиксацией.
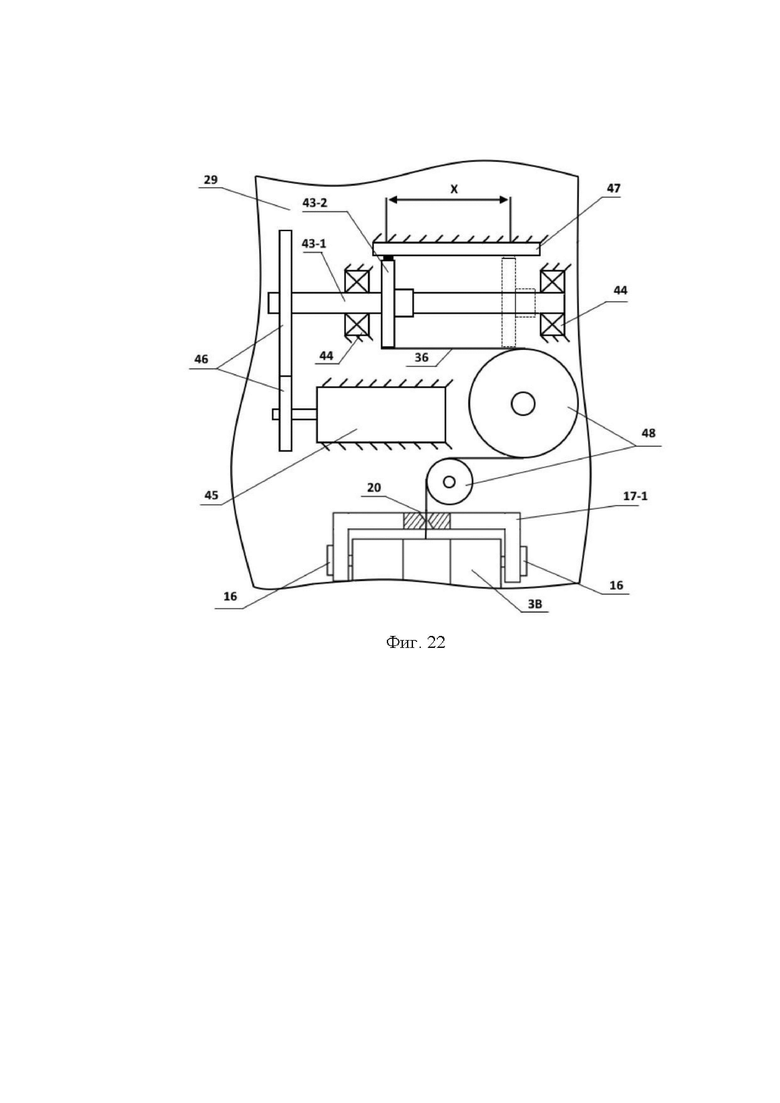
На фиг. 22 показана конструктивная схема установки линейного тягового привода.
Активный модуль спины экзоскелета включает в себя груд о-плечевой каркас 1 (фиг. 1-4) с системой ремней для закрепления на плечах и груди пользователя, позвоночный узел 2, включающий ряд связанных между собой позвоночных элементов - позвонков 3в, 3н, 3, жесткий С-образный пояс 4 с двумя поясными ремнями с защелками, который содержит центральный крестцовый элемент 5. Позвоночный узел состоит из N позвонков: первого верхнего 3в позвонка, последнего нижнего 3н позвонка и (N-2) одинаковых промежуточных позвонков 3.
На грудо-плечевой каркас 1 установлен тяговый привод 6. Внутренние поверхности пояса и каркаса, непосредственно соприкасающиеся с телом пользователя, покрыты упругим материалом для комфортного ношения модуля (на рисунках не показаны).
Промежуточный позвонок 3 (фиг. 5) выполнен в виде прямой призмы в конкретном предпочтительном исполнении с основанием близким к треугольнику. На верхней поверхности позвонка в углах равнобедренного треугольника, основание которого обращено к пользователю, размешен цилиндрические вкладыши 7 с плоской контактной площадкой, установленный в углублении заподлицо с поверхностью позвонка.
На нижней поверхности позвонка (на фиг. 6 позвонок повернут вокруг основания опорного треугольника) выполнены три опорных цилиндрических выступа 8 с шарообразной поверхностью на конце и концентрично выступам8 установлены три кольцевых тороидальных эластичных элемента 9-1,9-2, при этом высота h9 эластичных элементов больше, чем высота h8 опорного контактного выступа (фиг. 7). Контактная жесткость выступа с вкладышем, зависящая от материала вкладыша и радиуса шарообразной контактной поверхности выступа, выше чем жесткость на сжатие эластичных элементов, зависящая в свою очередь от упругих свойств материала элементов, диаметра и формы поперечного сечения. Причем значения жесткости на сжатие С1 каждого из эластичных элементов 9-1, установленных в углах на основании опорного треугольника, равны между собой и могут отличаться от жесткости С2 эластичного элемента 9-2, установленного в вершине опорного треугольника за счет разных диаметров d1, d2 и формы поперечного сечения при одинаковой высоте h9.
В теле позвонков (фиг. 7) на линии, проходящей через центры двух опорных зон, образующих основание опорного треугольника симметрично относительно ее середины перпендикулярно его верхней и нижней поверхности выполнены четыре сквозных отверстия, в которых установлены и закреплены цилиндрические вставки 10 из антифрикционного материала вдоль оси, по центру которых выполнены конусообразные сквозные отверстия 11. Эти отверстия 11 имеют форму двойного конуса подобную песочным часам, с круговым отверстием 12 в центре. Также в теле позвонков перпендикулярно его верхней и нижней поверхности выполнено конусообразное сквозное отверстие 13, подобное песочным часам с центральным круговым отверстием, а ось этого конусообразного отверстия расположена на расстоянии «а» от основания преимущественно в диапазоне от 0,3 до 0,6 высоты опорного треугольника Н, выбранного в соответствии с формулой:
полученной из условия параллельного сближения позвонков при сжатии за счет их стягивания тягой, проходящей через отверстия 13.
Так, например, для случая С1=С2 имеем:

а для случая С1=0,5С2 будет:

В верхнем 3в позвонке (фиг. 8 -10) на его боковых сторонах в плоскости, перпендикулярной опорным поверхностям и проходящей через основание опорного треугольника параллельно линии его основания выполнены два соосных цилиндрических отверстия 14 с вмонтированными в них подшипниками 15, например, шариковых или роликовых подшипников качения, или выполненных из антифрикционного материла в виде втулок подшипников скольжения (фиг. 10, разрез А-А). В качестве материала втулок может служить, например, капролон марки «МГ» - конструкционный полимер полиимид, модифицированный графитом, обладающий необходимой прочностью и антифрикционными свойствами.
В верхнем позвонке 3в так же, как и в промежуточных позвонках 3, закреплены цилиндрические вставки 10 из антифрикционного материала вдоль оси, по центру которых выполнены конусообразные сквозные отверстия 11 и выполнено отверстие 13 (фиг. 10, разрезы А-А, Б-Б). В подшипниках 15 установлены две соосных цапфы 16, закрепленные на верхней установочной пластине 17 с крепежными отверстиями 18. На верхней установочной пластине 17 на кронштейне 19 (фиг. 10, разрез В-В) выполнен цилиндрический опорный выступ 8, а также торообразный эластичный элемент 9, образующий контактную пару, расположенную в вершине опорного треугольника, с ответной плоской контактной площадкой вкладыша 7, расположенного наверхней поверхности верхнего позвонка. В пластине 17, соосно центральным отверстиям 13 в позвонках 3, выполнено сквозное цилиндрическое отверстие 20 с коническими проточками на входе и выходе из отверстия.
На установочной пластине 17 выполнены крепежные отверстия 21 (фиг. 9) для установки привода с резьбовыми отверстиями, в соответствии с которыми выполнены отверстия 21.
Тяговый привод 6 вращательного типа установлен на промежуточном замкнутом корпусе 22 (фиг. 11) с выполненными в нем отверстиями 21-1 согласованными с отверстиями 21 и с помощью винтов в части отверстий 21, 21-1, и соединен со шкивом 23, который вторым концом опирается на подшипник 24, установленный на корпусе 22 соосно с осью вращения привода. В корпусе 22 установлен отклоняющий ролик 25, вращающийся на оси 26, установленной одним концом в корпусе 22.
На стыковочном промежуточном (между корпусом 22 и приводом 6) кольце 27 также выполнены отверстия 21-2, повторяющие отверстия 21 и выполнено отверстие для установки второго конца оси 26 ролика 25.
В корпусе 22 выполнено входное отверстие 28, расположенное соосно отверстиям 13 позвоночного узла.
Центральная часть грудо-спинного каркаса 1 (фиг. 4) выполнена в виде верхней приемной пластины 29 с крепежными отверстиями 30 для установки верхней установочной пластины 17 путем совмещения отверстий 18 (фиг. 9) и 30.
Аналогично верхнему позвонку, в нижнем 3н позвонке (фиг. 12, 13) на его боковых сторонах в плоскости, перпендикулярной опорным поверхностям и проходящей через основание опорного треугольника параллельно линии основания опорного треугольника, выполнены два соосных цилиндрических отверстия 14-1 с вмонтированными в них подшипниками 15-1. В нижнем позвонке 3н также, как и в промежуточных позвонках 3, закреплены цилиндрические вставки 10, и выполнено отверстие 13, а в вершине опорноготреугольника выполнен цилиндрический выступ 8 и концентрично выступу установлен кольцевой тороидальный эластичный элемент 9 (фиг. 13, сечение А-А). В подшипниках 15-1 установлены две соосных цапфы 16-1 закрепленные на нижней установочной пластине 31 с крепежными отверстиями 35 (фиг. 13 - 15). На нижней установочной пластине 31 на кронштейне 32 в вершине опорного треугольника установлен контактный вкладыш 7. В пластине 31 соосно центральным отверстиям 13 в позвонках 3 выполнено сквозное цилиндрическое отверстие 33 с коническими проточками на входе и выходе из отверстия (фиг. 14, 15).
Центральная крестцовая часть 5 С-образного пояса 4 выполнена в виде нижней приемной пластины с группой последовательных отверстий 34 (фиг. 4), согласованных с отверстиями 35 на нижней установочной пластине 31, и служат для установки и закрепления пластины 31 в выбранном положении на приемной нижней пластине.
Описанные выше составные части активного модуля спины экзоскелета собираются воедино следующим образом.
Сначала на шкиве 23 закрепляется один конец тяги 36 с длиной до 400-600 мм (с запасом, уточняется в процессе сборки) и частично наматывается на шкив, после чего шкив скрепляется с выходным валом привода. На промежуточном кольце 27 устанавливается ролик 25 одним концом оси 26, а второй конец тяги 36 продевается сквозь отверстие 28 в корпусе 22 (фиг. 11 сечение В-В). После этого совмещаются отверстия 21-1 и 21-2 и устанавливаются вторые концы шкива в подшипнике 24 и оси 26 в корпусе 22 и с помощью не менее чем трех винтов корпус 22 соединяется с приводом 6.
Затем на нижнем позвонке 3н предварительно перед установкой их в нижнюю установочного пластину 31 (в соответствии с фиг. 13 сечение В-В) в двух, например, в средних конусообразных отверстиях вставок 10 снизу-вверх устанавливаются два направленных вверх прямолинейных упругих цилиндрических установочных прутка 37 (фиг. 16,а) круглого сечения сзакрепленными на их концах коническими вставками 38 и фиксируются с помощью планки 39 закрепляемой на нижнем позвонке с помощью винтов. При этом прутки 37 скрепляются со вставками 38 любым способом, например, с помощью резьбового соединения, обжимки прессованием или сваркой по торцу, а форма вставок соответствует конусу отверстия 11. При этом диаметр прутков 37 несколько меньше диаметра отверстий 12 в центре сквозных отверстий 11. После этого на установочные прутки 37 нанизываются промежуточные позвонки 3.
Аналогично, на верхнем позвонке Зв в двух, соответственно, крайних конусообразных отверстиях 11 вставок 10 устанавливаются два направленных вниз прямолинейных упругих цилиндрических установочных прутка 37-1 (фиг. 17,а) круглого сечения с закрепленными на их концах коническими вставками 38-1 и фиксируются с помощью планок 39-1, закрепляемых на верхнем позвонке с помощью винтов. После этого верхний позвонок 3в устанавливается в верхней установочной пластине 17 (в соответствии с фиг. 10 сечение А-А), а свободный конец тяги 36 продевается сквозь отверстия 20 и 13 верхнего позвонка.
Далее установочные прутки 37-1 вставляются в крайние отверстия 11 и продвигаются вдоль набора позвонков через отверстия 11, а тяга 36 продевается сквозь отверстия 13.
На конечном участке сборки позвоночного узла верхний позвонок нанизывается на прутки 37 вплоть до смыкания всех контактных зон позвонков, а тяга 36 с помощью наконечника продевается сквозь отверстие 33 нижней установочной пластины 31. На конце тяги выполнен крепежный элемент, например, узел, который фиксируется в конической проточке отверстия 33, например, также с помощью накладной планки, закрепленной на пластине 31.
Для предварительной настройки позвоночного модуля, исходя из роста пользователя, определяется ориентировочный размер модуля: выбираетсяколичество промежуточных позвонков и намечаются конкретные отверстия из групп 30,18 и 34, 35. Затем позвоночный узел 2 устанавливается на верхнюю приемную пластину 29 каркаса 1 и на крестцовый элемент 5 путем совмещения выбранных отверстий и скреплением винтами приемных и установочных пластин, соответственно 29 с17 и 5 с31. После сборки модуля экзоскелет надевается оператором, затягиваются ремни для плотного прилегания к телу. В случае появления дискомфорта при ношении экзоскелета, позвоночный модуль 2 переставляется ниже или выше по крепежным отверстиям элементов 29 и 5. После окончательной установки узла 2 в комфортном для оператора положении выполняется настройка конечной длины тяги 36. Для этого оператор принимает положение тела «стоя», при этом все позвонки сомкнуты с контактом всех элементов 9-1, 9-2 со смежными позвонками, привод при необходимости подматывает или стравливает тягу 36, после чего с помощью встроенного в привод 6 датчика, считывается угловое положение ротора привода и сохраняется в памяти управляющего устройства экзоскелета как начальное, что соответствует начальной длине тяги 36 и длине позвоночного узла Lo (фиг. 20, а). Затем оператор выполняет максимально возможный наклон вперед в сагитальной плоскости, тем самым разматывая тягу 36 со шкива 23, что приводит к проворачиванию ротора привода 6. После этого угловое положение ротора запоминается устройством управления как конечное, тем самым определяя конечную длину тяги 36 и, соответственно, длину позвоночного узла L2 (фиг. 21, б).
Кроме основной функции по разгрузке спины оператора, модуль спины служит опорой для установки дополнительного оборудования, помогающего при выполнении типовых операций на производстве, таких как работа с тяжелым инструментом в статичной позе. Таким оборудованием могут служить, например, подпружиненные механические устройства, выполненные, например, по типу пантографа 40, закрепляемые в двух узлах 41, которые расположены на поверхности верхней приемной пластины 29, слева и справа от позвоночного узла 2 и выполнены в виде пластин сотверстиями. С их помощью такого дополнительного оборудования снимается нагрузка с рук и плеч оператора, что также способствует снижению утомляемости и повышает эффективность работы с инструментом.
Активный модуль спины работает следующим образом.
В положении стоя при ходьбе оператора в экзоскелете, в состав которого входит активный модуль спины, соединенный модулем нижних конечностей, пользователь имеет достаточную свободу и объем движений туловища в пределах суммы упругих деформаций всех межпозвонковых тороидальных эластичных элементов 9 в пределах разницы высот (h9-h8) (фиг. 7), выполняющих роль, аналогичную межпозвоковым дискам в позвоночнике человека. При этом общая длина позвоночного угла 2 составляет длину Lo (фиг. 20, а).
При необходимости в положении стоя принять устойчивую позу для работы с инструментом, например, с некоторым разворотом в сторону стены для работы с ручным инструментом типа перфоратор или дрель, оператор выполняет необходимый разворот и фиксирует поворот путем включения привода на втягивание тяги 36 от начального положения на заданную величину путем намотки тяги 36 на шкив 23 с достаточной силой для смятия всех эластичных элементов 9 на величину (h9-h8) и более для «жесткого» силового упора выступов 8 во вкладыши 7 (фиг 20, б). Нормальные контактные силы порождают значительные контактные тангенциальные силы трения в вершинах опорных треугольников в силу высокого коэффициента трения контактной пары выступ - вкладыш и упругого силового «вмятия» выступа во вкладыш. Тангенциальные силы трения, в свою очередь, являются причиной возникновения реактивного момента, препятствующего обратному развороту позвоночного узла, снимая тем самым нагрузку с мышечного аппарата туловища оператора, что облегчает ему работу и предотвращает усталость.
Для взятия груза (далее под грузом будет подразумеваться как объект для переноса, так и тяжелый инструмент, с которым необходимо работать), оператор наклоняется вперед. Это приводит к изгибу позвоночника оператора и изменению длины дуги на поверхности спины, к которой прилегает активный модуль позвоночника, так как она отстоит от нейтральной линии изгиба позвоночника, которая проходит внутри «сечения» позвоночных дисков, причем ближе к его внутреннему краю. Плечи оператора начинают давить на плечевые дуги, расположенные на каркасе 1. Это приводит к расхождению позвонков узла 2 (фиг. 21, б), что проявляется в возникновении (N+1) зазоров δi между позвонками 3в, 3, 3н и установочными пластинами. В процессе наклона позвонки свободно скользят по упругим пруткам 37 и 37-1 благодаря зазорам в отверстиях 12 и антифрикционным свойствам вставок 10.
Помимо расхождения позвонков по пруткам, со шкива 23 свободно разматывается тяга 36 за счет, например, размыкания обмоток двигателя либо управляемого поворота шкива, которые выполняются приводом по команде приводу от системы управления экзоскелета, инициируемой оператором. Помимо удлинения позвоночного модуля происходит свободный изгиб упругих стержней 37, 37-1, что приводит к запасанию потенциальной энергии упругой изгибной деформации стержней 37.
Далее, после захвата груза с пола оператором, практически всегда выполняемого с приседом, начинается процесс подъема. Оператор принимает биомеханически благоприятную позу, при которой центр тяжести тела оператора в экзоскелете с грузом находится над пятками оператора, для чего он регулирует глубину приседа. Вместе с тем, оператор должен принять биомеханически безопасную позу, для чего он должен выпрямить спину сприданием ей естественных изгибов, в частности прогиба (лордоза) поясницы. В процессе принятия благоприятной позы по команде оператора включается привод на втягивание тяги до начального положения (фиг. 20, а) с распрямлением и высвобождением упругой энергии стержней 37 и дополнительного сжатия позвоночного узла 2 путем сжатия эластичных элементов 9 и силового контактного вжатия выступов 8 во вкладыши 7 (фиг. 21, в). В результате позвоночный узел превращается в жесткий стержень, который способен воспринимать нагрузку от веса груза и тем самым разгрузить позвоночник оператора. После этого осуществляется вставание оператора с переносом нагрузок на экзоскелет и перемещение груза или работа с инструментом. Далее, переход в свободную позу осуществляется путем ослабления сжатия и перевода тяги 36 в начальное положение (фиг. 20, а) путем ослабления натяжения тяги 36 и частичного сматывания ее со шкива 23.
Вариантом исполнения активного модуля спины может служить применение в качестве тягового привода линейного привода, элементы которого установлены на приемной пластине 29 грудо-плечевого каркаса (фиг. 22). Также вариантом исполнения активного модуля спины может быть служить закрепление установочных прутков 37 на нижнем позвонке в двух крайних конусообразных отверстиях антифрикционных вставок 10 (фиг. 16,б), а на верхнем позвонке закрепление установочных прутков 37-1 в двух средних конусообразных отверстиях антифрикционных вставок 10 (фиг. 17, б).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКЗОСКЕЛЕТ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2015 |
|
RU2696631C2 |
| Экзоскелет для спины человека | 2024 |
|
RU2838297C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПЕВТИЧЕСКОГО ОЗДОРОВЛЕНИЯ ЧЕЛОВЕКА | 2012 |
|
RU2519975C1 |
| ЭКЗОПОЗВОНОЧНИК ГИБКИЙ ДЛЯ РЕАБИЛИТАЦИИ | 2022 |
|
RU2805805C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ДЕФОРМАЦИЙ ПОЗВОНОЧНИКА И КОСТЕЙ ТАЗА | 2004 |
|
RU2294731C2 |
| СПОСОБ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ ДЕФОРМАЦИЙ ПОЗВОНОЧНИКА И ОРТОПЕДИЧЕСКИЙ КОМПЛЕКТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2329014C2 |
| Способ устранения деформации позвоночника | 2021 |
|
RU2782995C1 |
| СПОСОБ ЛЕЧЕНИЯ ПОЗВОНОЧНИКА | 2000 |
|
RU2178285C1 |
| СПОСОБ ОЗДОРОВЛЕНИЯ ПОЗВОНОЧНИКА И СУСТАВОВ | 2013 |
|
RU2545447C1 |
| СПОСОБ КОРРЕКЦИИ КИЛЕВИДНОЙ ДЕФОРМАЦИИ ГРУДНОЙ КЛЕТКИ И ДЕФОРМАЦИИ ПОЗВОНОЧНИКА ОРТЕЗОМ | 2022 |
|
RU2784920C1 |
Изобретение относится к медицинской технике, а именно к экзоскелетам. Активный модуль спины экзоскелета содержит грудо-плечевой каркас, выполненный с возможностью закрепления на плечевом поясе и груди оператора с помощью системы ремней, позвоночный узел, проходящий вниз от грудо-плечевого каркаса вдоль позвоночника оператора и включающий ряд связанных между собой позвоночных элементов - позвонков и С-образный пояс с двумя поясными ремнями с защелками. С-образный пояс содержит центральный крестцовый элемент. Самый верхний позвонок соединен с грудо-плечевым каркасом, а нижний позвонок соединен с центральным крестцовым элементом пояса. В состав активного модуля спины включен тяговый привод фиксации-расфиксации позвоночного столба для натягивания или ослабления тяги, одним концом прикрепленную в сборе к крестцовому элементу пояса, проходящую внутри позвоночного столба и прикрепленную вторым подвижным концом к шкиву тягового привода вращательного типа, закрепленного в собранном виде на грудо-плечевом каркасе. Самый верхний позвонок соединен с грудо-плечевым каркасом, а самый нижний позвонок соединен с центральным нижним крестцовым элементом пояса с помощью цилиндрических шарниров, оси которых направлены перпендикулярно сагитальной плоскости. Позвонки выполнены в виде прямой призмы, на верхних и нижних поверхностях которых выполнены согласованные по размерам и взаимному расположению три образованные выступами и вкладышами контактные зоны, расположенные в углах равнобедренного треугольника, основание, большая сторона которого расположена со стороны позвоночника оператора. На одной из поверхностей позвонка выполнены три опорных цилиндрических выступа с шарообразной контактной поверхностью на конце, а на противостоящей поверхности соседнего позвонка напротив каждого выступа размещен контактный цилиндрический вкладыш с плоской контактной площадкой, установленный в углублении заподлицо с поверхностью позвонка. Шаровая поверхность выступа и поверхность вкладыша образуют контактную пару. На поверхности позвонка с цилиндрическими выступами концентрично им установлены кольцевые тороидальные эластичные элементы. Жесткость контактной зоны выступ-вкладыш выше жесткости на сжатие эластичных элементов, а высота эластичных элементов больше чем высота опорного контактного выступа. На нижнем позвонке в двух средних конусообразных отверстиях антифрикционных вставок закреплены два направленных вверх прямолинейных упругих цилиндрических установочных прутка круглого сечения, а на верхнем позвонке в двух крайних конусообразных отверстиях вставок закреплены два направленных вниз прямолинейных упругих цилиндрических установочных прутка круглого сечения. Длина прутков лежит в диапазоне от 0,8 до 1,0 суммарной длины всех позвонков, а диаметр прутков, меньше диаметра центральных отверстий конусообразных вставок. На верхней приемной пластине справа и слева от позвоночного узла выполнены две пластины с отверстиями для присоединения оборудования. Техническим результатом является обеспечение разгрузки позвоночника и мышц спины во время выполнения такелажных работ, при подъеме тяжелых и/или объёмных предметов с пола, при выполнении рабочих операций с инструментом в статичной позе при сохранении подвижности пользователя в экзоскелете во время ходьбы, при выполнении монтажных или сборочных операций; упрощение конструкции модуля спины экзоскелета; повышение надежности позвоночного узла; обеспечение возможности адаптации модуля спины к антропометрическим параметрам пользователей; обеспечение возможности установки на модуль спины дополнительного оборудования. 2 з.п. ф-лы, 22 ил.
1. Активный модуль спины экзоскелета, содержащий грудо-плечевой каркас, выполненный с возможностью закрепления на плечевом поясе и груди оператора с помощью системы ремней, позвоночный узел, проходящий вниз от грудо-плечевого каркаса вдоль позвоночника оператора и включающий ряд связанных между собой позвоночных элементов - позвонков и С-образный пояс с двумя поясными ремнями с защелками, С-образный пояс содержит центральный крестцовый элемент, самый верхний позвонок соединен с грудо-плечевым каркасом, а нижний позвонок соединен с центральным крестцовым элементом пояса отличающийся тем, что
в состав активного модуля спины включен тяговый привод фиксации-расфиксации позвоночного столба для натягивания или ослабления тяги, одним концом прикрепленную в сборе к крестцовому элементу пояса, проходящую внутри позвоночного столба и прикрепленную вторым подвижным концом к шкиву тягового привода вращательного типа, закрепленного в собранном виде на грудо-плечевом каркасе;
самый верхний позвонок соединен с грудо-плечевым каркасом, а самый нижний позвонок соединен с центральным нижним крестцовым элементом пояса с помощью цилиндрических шарниров, оси которых направлены перпендикулярно сагитальной плоскости;
позвонки выполнены в виде прямой призмы, на верхних и нижних поверхностях которых выполнены согласованные по размерам и взаимному расположению три образованные выступами и вкладышами контактные зоны, расположенные в углах равнобедренного треугольника, основание, большая сторона которого расположена со стороны позвоночника оператора, при этом на одной из поверхностей позвонка выполнены три опорных цилиндрических выступа с шарообразной контактной поверхностью на конце, а на противостоящей поверхности соседнего позвонка напротив каждого выступа размещен контактный цилиндрический вкладыш с плоской контактной площадкой, установленный в углублении заподлицо с поверхностью позвонка, при этом шаровая поверхность выступа и поверхность вкладыша образуют контактную пару, причем на поверхности позвонка с цилиндрическими выступами концентрично им установлены кольцевые тороидальные эластичные элементы, при этом жесткость контактной зоны выступ-вкладыш выше жесткости на сжатие эластичных элементов, а высота эластичных элементов больше чем высота опорного контактного выступа;
в теле позвонков на линии, проходящей через центры двух опорных зон, образующих основание опорного треугольника симметрично относительно середины линии перпендикулярно его верхней и нижней поверхностям, выполнены четыре сквозных отверстия, в которых установлены цилиндрические вставки из антифрикционного материала вдоль оси, по центру которых выполнены конусообразные сквозные отверстия, имеющие форму двойного конуса, подобную песочным часам, с круговым отверстием в центре, а в теле позвонков перпендикулярно его верхней и нижней поверхностям выполнено конусообразное сквозное отверстие, подобное песочным часам, с центральным круговым отверстием, а ось конусообразного отверстия расположена на расстоянии а от основания на высоте опорного треугольника, построенной к его основанию, зависящему от соотношения жесткостей на сжатие кольцевых тороидальные эластичных элементов в основании опорного треугольника С1 и его вершине С2 и вычисляется по формуле
в верхнем и нижнем позвонках на их боковых сторонах в плоскости перпендикулярной опорным поверхностям и проходящей через основание опорного треугольника параллельно линии основания опорного треугольника выполнены два соосных цилиндрических отверстия с вмонтированными подшипниками, в которых установлены две соосных цапфы, закрепленные на верхней и нижней установочных пластинах; установочные пластины закреплены, соответственно, на верхней и нижней крепежных пластинах, выполненных по центру на задней стороне грудо-плечевого каркаса и на центральной крестцовой части пояса модуля спины с возможностью смещения установочных пластин в направлении вверх - вниз вдоль соответствующих крепежных пластин, на которых выполнены последовательные отверстия, соответствующие по конфигурации крепежным отверстиям на установочных пластинах; тяговый привод установлен непосредственно на верхней крепежной пластине;
на верхней установочной пластине установлен один цилиндрический опорный выступ, образующий контактную пару, расположенную в вершине опорного треугольника с ответной плоской контактной площадкой, расположенной на верхней поверхности верхнего позвонка, а на нижней установочной пластине установлена контактная площадка, образующая контактную пару расположенного в вершине опорного треугольника с опорным выступом на нижней поверхности нижнего позвонка; в установочных пластинах соосно отверстиям в позвонках выполнены сквозные отверстия для прохождения сквозь них тяги привода; на нижней установочной пластине закреплен неподвижный конец тяги,
на нижнем позвонке в двух средних конусообразных отверстиях антифрикционных вставок закреплены два направленных вверх прямолинейных упругих цилиндрических установочных прутка круглого сечения, а на верхнем позвонке в двух крайних конусообразных отверстиях вставок закреплены два направленных вниз прямолинейных упругих цилиндрических установочных прутка круглого сечения; длина прутков лежит в диапазоне от 0,8 до 1,0 суммарной длины всех позвонков, а диаметр прутков меньше диаметра центральных отверстий конусообразных вставок;
на верхней приемной пластине справа и слева от позвоночного узла выполнены две пластины с отверстиями для присоединения оборудования.
2. Активный модуль спины экзоскелета по п.1, отличающийся тем, что в качестве тягового привода применен закрепленный на грудо-плечевом каркасе линейный привод, к подвижной части которого прикреплен подвижный конец тяги.
3. Активный модуль спины экзоскелета по пп.1, 2 отличающийся тем, что на нижнем позвонке установочные прутки закреплены в двух крайних конусообразных отверстиях антифрикционных вставок, а на верхнем позвонке в двух средних конусообразных отверстиях антифрикционных вставок.
| US 20210069890 A1, 11.03.2021 | |||
| US 2021236374 A1, 05.08.2021 | |||
| US 11141342 B2, 12.10.2021 | |||
| US 2020368094 A1, 26.11.2020 | |||
| CN 111587167 A, 25.08.2020. |

