Изобретение относится к области обеспечения полетов воздушных судов электроэнергией, посредством подвижных средств и может быть использована при подготовке воздушных судов к полетам.
Известен авиационный подвижный электроагрегат АПА-5Д1 (Авиационный подвижной электроагрегат АПА-5Д1. Руководство по эксплуатации ЮСЯИ 244.00.00.000РЭ), на базе автомобиля Урал-4320-31, состоящий из ходового двигателя автомобиля Камаз-740.10, сцепления, коробки передач, карданного вала к раздаточной коробке базового шасси, раздаточной коробки базового шасси, коробки отбора мощности, карданного вала к раздаточной коробке электроагрегата, раздаточной коробки электроагрегата, генераторов, оборудования обеспечивающего управление и передачу электроэнергии потребителям. Особенностью данного электроагрегата является наличие кинематической схемы передачи крутящего момента от источника (двигателя автомобиля) к потребителям (генераторам электроагрегата) посредством механических узлов и агрегатов.
Недостатком данного привода является низкая надежность, так как в случае выхода из строя базового двигателя и любого элемента привода возникает полная потеря работоспособности специального оборудования, что обусловливает необеспеченность электроэнергией воздушных судов в процессе их подготовки к вылету. Так, подключение мощных потребителей вызывает резкие колебания мощности, изменяющие на генераторе его электромагнитный тормозной момент и, как следствие, частоту вращения приводных узлов от двигателя шасси, на которые, в том числе действуют ударные нагрузки. При этом наиболее дефектным в эксплуатации является карданный вал, передающий крутящий момент от коробки дополнительного отбора мощности шасси автомобиля к раздаточной коробке электроагрегата, что обусловлено его разбалансировкой и разрушениями в местах крепления фланцев и крестовин. Вследствие крутильных колебаний, возникающих на коленчатом валу двигателя и валах трансмиссии от неравномерности работы двигателя, ударных нагрузок в агрегатах и механизмах трансмиссии, возникающих при резком включении сцепления, возникают неисправности раздаточной коробки электроагрегата. Таким образом, надежность механизмов и узлов трансмиссии во многом обусловлена влиянием динамических и ударных нагрузок. Динамические нагрузки возникают при изменении скорости движения механизма в результате управляющих или возмущающих воздействий. Ударные нагрузки возникают в процессе выборки зазоров в передаче.
Известен авиационный подвижной электроагрегат АПА-100У (Авиационный подвижной электроагрегат АПА - 100У. Руководство по эксплуатации ИВУА.561331.001РЭ) на базе автомобиля Урал-4320-1011-31, состоящий из автомобильного базового шасси, отдельного двигателя электроагрегата Камаз-740.39-380 являющегося источником механической энергии, преобразуемой генераторами в электрическую, эластичной муфты, генератора, оборудования обеспечивающего управление и передачу электроэнергии потребителям. Особенностью является наличие кинематической схемы передачи крутящего момента от индивидуального источника механической энергии (двигателя Камаз-740.39-380) к единственному генератору типа БГЧ-100 посредством эластичной муфты.
Недостаток данного электроагрегата заключается в экономической необоснованности его применения для основной массы воздушных судов, ввиду завышенной себестоимости, избыточной мощности агрегатов и как следствие значительных эксплуатационных расходов,
Наиболее близким прототипом является авиационный подвижный электроагрегат АПА-5ДМ-ГП на базе автомобиля на базе Урал-4320-31 (Патент РФ №217954, МПК B64F 1/34, Опуб. 26.04.2023), состоящий из ходового двигателя автомобиля Камаз-740.10, сцепления, коробки передач, карданного вала к раздаточной коробке базового шасси, раздаточной коробки базового шасси, коробки отбора мощности, аксиально поршневой регулируемой гидросистемы насос - мотор, раздаточной коробкой электроагрегата, генераторов, оборудования, обеспечивающего управление и передачу электроэнергии потребителям. Особенностью является наличие кинематической схемы передачи крутящего момента от источника (двигателя автомобиля) к потребителям (генераторам электроагрегата) посредством использования аксиально-поршневого регулируемого гидронасоса с автоматическим регулятором гидравлического потока и связанного с ними гидрогенератора.
Недостатком данного электроагрегата является применение схемы с открытым контуром, не позволяющим обеспечить систему постоянным расходом и давлением рабочей жидкости, чего требует реальная эксплуатация объекта; отсутствие средств автоматизации высокой надежности, обеспечивающих постоянный контроль и регулирование параметров работы системы, отсутствие средств поддержания температурного режима гидросистемы.
Технической задачей изобретения является повышение стабильности выходных параметров генераторов электроагрегата за счет исключения влияния погрешности частоты вращения двигателя автомобиля.
Технический результат достигается авиационным подвижным электроагрегатом на базе автомобиля УРАЛ-4320-31, состоящий из двигателя, базового шасси, сцепления, коробки передач, карданного вала к раздаточной коробке базового шасси, коробки отбора мощности, аксиально поршневой регулируемой гидросистемы насос – мотор с электропропорциональным управлением, раздаточной коробкой электроагрегата, генераторов, оборудования, обеспечивающего управление и передачу электроэнергии потребителям, автоматического регулятора гидравлического потока, отличающийся тем, что содержит регулируемый нереверсируемый гидронасос с автоматическим регулятором расхода рабочей жидкости, состоящий из датчика частоты вращения гидромотора, электропропорционального регулятора гидронасоса и программно-логического контроллера, поддерживающего заданную частоту вращения выходного вала гидромотора с заданной точностью.
Отличительной особенностью является наличие аксиально – поршневой закрытой гидросистемы с электропропорциональным управлением на основе программно-логического контроллера, обеспечивающей автоматическое регулирование системы в заданных параметрах с возможностью реализации указанной схемы с закрытым контуром.
Основными преимуществами заявляемого устройства являются:
- применение аксиально – поршневой закрытой гидросистемы с электропропорциональным управлением на основе программно-логического контроллера, обеспечивающей автоматическое регулирование системы в заданных параметрах;
- применение гидросистемы с закрытым контуром, обеспечивающей постоянный расход и давление рабочей жидкости, и как следствие стабильность выходных параметров гидромотора;
- применение нагревательно-охладительных устройств, обеспечивающих эксплуатацию в экстремальных климатических условиях
- применение контрольно-измерительных приборов, обеспечивающих контроль параметров жидкости в магистралях.
Наличие указанных признаков в заявляемом устройстве обеспечивает его соответствие условию патентоспособности «новизна» и «изобретательский уровень». При этом в уровне техники не обнаружены устройства, в которых технический результат достигается приведенной совокупностью существенных признаков.
Сущность изобретния поясняется принципиальной гидравлической схемой электроагрегата АПА-5ДМ-ЭГП аксиально – поршневой закрытой гидросистемы с электропропорциональным управлением на основе программно-логического контроллера.
Авиационный подвижный электроагрегат АПА-5ДМ-ЭГП 9 (см. чертеж) состоит из двигателя базового шасси 1, сцепления 2, коробки передач 3, карданного вала к раздаточной коробке базового шасси 4, раздаточной коробки базового шасси 5, коробки дополнительного отбора мощности 6, электропропорционального аксиально-поршневого регулируемого нереверсируемого гидронасоса 7 (далее – гидронасос) с шестеренным насосом подпитки 8, программным логическим контроллером 9 (далее – ПЛК), обратными клапанами 10, предохранительным клапаном подпитки 11, гидромотора с выходным валом 12 и датчиком частоты вращения 13, раздаточного редуктора генераторов 14, гидробака 15, подогревателя рабочей жидкости от системы охлаждения ДВС базового шасси 16, теплообменника 17 с вентилятором 18, блока сливных фильтров 19, технологического вентиля 20, клапанной коробки с предохранительными клапанами, перекидным золотником и предохранительными клапанами 21, датчиков контроля давления в рабочих линиях 22, датчика давления слива утечек из корпуса гидронасоса 23, датчика температуры рабочей жидкости 24, всасывающего фильтра 25, технологического вентиля линии всасывания 26 и датчика давления подпитки 27.
Принцип работы привода электроагрегата состоит в том, что гидронасос 7 получает крутящий момент от коробки дополнительного отбора мощности 6 и, преобразуя вращательную (механическую) энергию насоса в энергию потока рабочей жидкости, находящейся в предварительно заправленном закрытом контуре с гидромотором 12, нагнетает ее под давлением в напорную магистраль, выполненную в виде рукавов высокого давления. Гидронасос 7, обеспечивает поступление равномерного потока гидравлической жидкости, в том числе при колебаниях числа оборотов двигателя базового шасси 1. Гидравлический поток из гидронасоса 7 направляется в гидромотор 12, преобразующий энергию потока рабочей жидкости во вращательное движение его выходного вала, обеспечивая требуемый крутящий момент и частоту вращения на раздаточном редукторе электроагрегата 14. Саморегулирование гидронасоса 7 реализуется посредством встроенного в него электромагнитного сервоклапана, получающего управляющий сигнал от ПЛК 9, в результате отклоняется люлька ходовой части, и в рабочие линии поступает жидкость под давлением, расход которой пропорционален элетромеханическому сигналу. Расход рабочей жидкости в силовой линии приводит в движение гидромотор 12, создавая требуемый крутящий момент и частоту вращения на его выходном валу. В процессе работы закрытого контура возникают утечки рабочей жидкости, которые восполняются насосом подпитки 8. Равномерная работа закрытой системы регулируется обратными клапанами 10 и клапанной коробкой 21.
Автоматическое регулирование частоты вращения гидромотора 12, осуществляется посредством датчика частоты вращения 13, установленного на нём, ПЛК 9 и гидронасоса 7. ПЛК 9, посредством датчика частоты вращения 13, получает сигнал о частоте вращения гидромотора 12 и при помощи программного обеспечения автоматически поддерживает ее на заданном уровне, регулированием расхода рабочей жидкости в силовых линиях в требуемых пределах посредством воздействия на электросервоклапан гидронасоса 7. Регулирование гидронасоса 7 происходит бесступенчато, механическая связь с гидромотором отсутствует, что обеспечивает плавное и безударное изменение режимов работы гидросистемы.
Гидромотор 12, в зависимости от регулируемого гидравлического потока рабочего объема, имеет возможность получения различных скоростей и моментов вращения выходного вала.
Величина развиваемого момента раздаточном редукторе электроагрегата 14 пропорциональна давлению в силовых линиях, а частота вращения пропорциональна величине угла отклонения люльки гидронасоса 7. При этом гидронасос 7 может быть оснащен датчиком угла наклона люльки, что в совокупности с датчиками давления 22 позволяет на программном уровне через ПЛК 9 реализовать режим работы при постоянной мощности на выходном валу гидромотора 12.
Гидросистема оснащена подогревателем рабочей жидкости 16 в гидробаке с отбором теплоносителя от системы охлаждения ДВС базового шасси, обеспечивающего прогрев рабочей жидкости до требуемой по ТУ и запуск гидросистемы при низких температурах в северных широтах и низких температурах окружающего воздуха с отсечкой теплоносителя после прогрева по данным датчика температуры 24. Также гидросистема оснащена теплообменником 17, обеспечивающим поддержание оптимальной температуры рабочей жидкости при ее разогреве и вентилятором 18, включаемым по команде ПЛК 9 при достижении максимально-возможной температуры рабочей жидкости и ее охлаждение по датчику температуры 24, что обеспечивает работоспособность системы при работе в южных широтах и высокой температуре окружающей среды.
Также гидросистема оснащена сливными 19 и всасывающими фильтрами 25, которые дополнительно могут оснащаться электронными датчиками загрязнения, а также перекрывными вентилями 26 и 20 для технического обслуживания.
С учетом вышеизложенного работа электроагрегата АПА-5ДМ-ЭГП может осуществляться в достаточно широком диапазоне скоростей и в экстремальных климатических условиях, параметры которого выдаются с высокой точностью.
В заявляемом устройстве, в отличие от прототипа, применен эффективный, надежный и реальный принцип привода электроагрегата от двигателя базового шасси посредством бесступенчатого регулирования крутящего момента на валу раздаточного редуктора электроагрегата, реализуемого путем автоматического управления потоком рабочей жидкости привода пропорционально автоматическому воздействию на механизм управления.
Таким образом, заявленное изобретение позволяет повысить стабильность выходных параметров генераторов электроагрегата за счет исключения влияния погрешности частоты вращения двигателя автомобиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ СТАНЦИЯ ЭЛЕКТРОСНАБЖЕНИЯ АВИАДВИГАТЕЛЕЙ И БОРТОВЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2730805C1 |
| ВИБРАТОР СЕЙСМИЧЕСКИЙ МОБИЛЬНЫЙ | 2006 |
|
RU2316793C1 |
| МЕХАНИЗМ ОТБОРА МОЩНОСТИ (ВАРИАНТЫ) | 2003 |
|
RU2252149C1 |
| Самоходная машина для распределения материала | 1990 |
|
SU1790845A1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ДОРОЖНОЙ ПОВЕРХНОСТИ | 1993 |
|
RU2041313C1 |
| ГИДРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2742664C1 |
| ПЕРЕДВИЖНАЯ СМЕСИТЕЛЬНАЯ УСТАНОВКА | 2002 |
|
RU2256062C2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА МАШИНЫ С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2529111C1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |

Изобретение относится к области обеспечения полетов воздушных судов электроэнергией посредством подвижных средств и может быть использовано при подготовке воздушных судов к полетам. Электроагрегат оборудован аксиально-поршневой регулируемой гидросистемой насос – мотор с электропропорциональным управлением, обеспечивающей управление и передачу электроэнергии потребителям, и автоматического регулятора гидравлического потока. Электроагрегат содержит регулируемый нереверсируемый гидронасос с автоматическим регулятором расхода рабочей жидкости, состоящий из датчика частоты вращения гидромотора, электропропорционального регулятора гидронасоса и программно-логического контроллера, поддерживающего заданную частоту вращения выходного вала гидромотора с заданной точностью. Достигается исключение влияния погрешности частоты вращения двигателя автомобиля на выходной диапазон параметров генераторов электроагрегата и повышение их точности, повышение показателей надежности, исключение резких колебаний мощности и инерционности существующих систем, исключение влияния динамических и ударных нагрузок от агрегатов трансмиссии. 1 ил.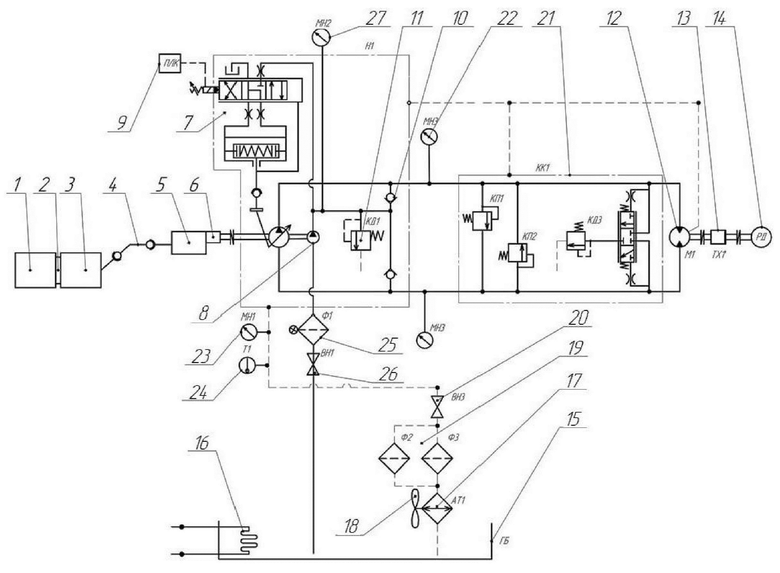
Авиационный подвижный электроагрегат на базе автомобиля УРАЛ-4320-31, состоящий из двигателя базового шасси, сцепления, коробки передач, карданного вала к раздаточной коробке базового шасси, коробки отбора мощности, аксиально-поршневой регулируемой гидросистемы насос – мотор с электропропорциональным управлением, раздаточной коробкой электроагрегата, генераторов, оборудования, обеспечивающего управление и передачу электроэнергии потребителям, и автоматического регулятора гидравлического потока, отличающийся тем, что содержит регулируемый нереверсируемый гидронасос с автоматическим регулятором расхода рабочей жидкости, состоящий из датчика частоты вращения гидромотора, электропропорционального регулятора гидронасоса и программно-логического контроллера, поддерживающего заданную частоту вращения выходного вала гидромотора с заданной точностью.
| RU 217954 U1, 26.04.2023 | |||
| УСТРОЙСТВО ЗАЩИТЫ ГИДРОАГРЕГАТОВ ОТ ТОКОВ ОБРАТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 0 |
|
SU210238A1 |
| ОБРАЗОВАТЕЛЬ ВЕНТИЛЯЦИОННЫХ КАНАЛОВ В СКИРДАХ СЕНА ИЛИ СОЛОМЫ | 0 |
|
SU204798A1 |
| US 6424891 B1, 23.07.2002 | |||
| ПЕРЕДВИЖНОЙ АГРЕГАТ АЭРОДРОМНОГО ОБСЛУЖИВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2364556C1 |

