ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к устройству формирования изображения для компьютерной томографии. В частности, конструкции устройства согласно данному изобретению применимы для использования в области стоматологических и медицинских устройств формирования изображения для конусно-лучевой компьютерной томографии (КЛКТ).
УРОВЕНЬ ТЕХНИКИ
Компьютерная томография (КТ) - это вид рентгеновского формирования изображения, при котором объем, изображение которого необходимо сформировать, облучают с разных направлений, и из полученной таким образом визуальной информации может быть построено требуемое двухмерное или трехмерное изображение.
Известные устройства компьютерной томографии являются большими и массивными, и они, как правило, установлены на полу. Для формирования изображения пациента размещают в смотровом отверстии устройства, как правило, на смотровой платформе, расположенной горизонтально и выполненной с возможностью перемещения в боковом направлении.
С развитием технологии конусно-лучевой компьютерной томографии (КЛКТ), в которой, например, используются более низкие скорости поворота средства формирования изображения, было разработано устройство с меньшим весом, чем у более традиционного КТ-устройства. Среди устройств КЛКТ есть также, например, устройства, которые не предназначены для установки на полу, а выполнены мобильными. Также были разработаны конструкции, содержащие вертикально проходящую раму и горизонтально проходящую опору для средства формирования изображения.
Если рассматривать медицинские рентгеновские устройства формирования изображения в целом, то устройства, содержащие конструкцию для поддержки пациента, как правило, разработаны для формирования изображения либо стоящего, либо сидящего, либо лежащего пациента.
Некоторые КТ-устройства, разработанные в последнее время, являются многоцелевыми устройствами, поддерживающими более одной модальности формирования изображения, что, с другой стороны, увеличивает сложность такого устройства, например, поскольку один или более компонентов устройства выполнены с возможностью нового типа свободы перемещения. Кроме того, вес устройства может быть увеличен, а некоторые модификации могут, например, создать новые проблемы, связанные с расположением пациента для оказания воздействия.
Например, в патенте США №7,945,012 рассмотрены различные режимы формирования изображения устройства формирования изображения для компьютерной томографии, но при этом не описаны конкретные и подробные варианты выполнения конструкции, с помощью которых возможно осуществление перемещений, требуемых для осуществления таких режимов формирования изображения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью изобретения является создание устройства для компьютерной томографии, в частности КЛКТ-устройства, обладающего признаками, относящимися к взаимному расположению устройства и пациента для оказания воздействия. В вариантах выполнения устройство выполнено с возможностью воздействий согласно более чем одному режиму формирования изображения.
Признаки, характеризующие данное изобретения, указаны в п. 1 формулы изобретения. В частности, устройство согласно данному изобретению содержит первую проходящую продольно рамную часть. Опорная конструкция проходит от проходящей продольно рамной части по существу перпендикулярно. Источник рентгеновского излучения и детектор изображения, которые вместе образуют узел формирования рентгеновского изображения, установлены на опорной конструкции. Для перемещения узла формирования рентгеновского изображения вокруг виртуальной или физической оси поворота имеется первый приводной механизм. Имеется система управления, имеющая по меньшей мере один режим работы и обеспечивающая одновременное управление указанным первым приводным механизмом и работой узла формирования рентгеновского изображения. Опорная конструкция содержит по меньшей мере один направляющий механизм, выполненный с обеспечением возможности бокового перемещения источника рентгеновского излучения или детектора изображения или их обоих относительно опорной конструкции. Диапазон указанного бокового перемещения источника рентгеновского излучения, или детектора изображения, или их обоих включает основное положение и первое и второе крайние положения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее изобретение описано подробнее со ссылкой на некоторые предпочтительные варианты выполнения и прилагаемые чертежи, на которых:
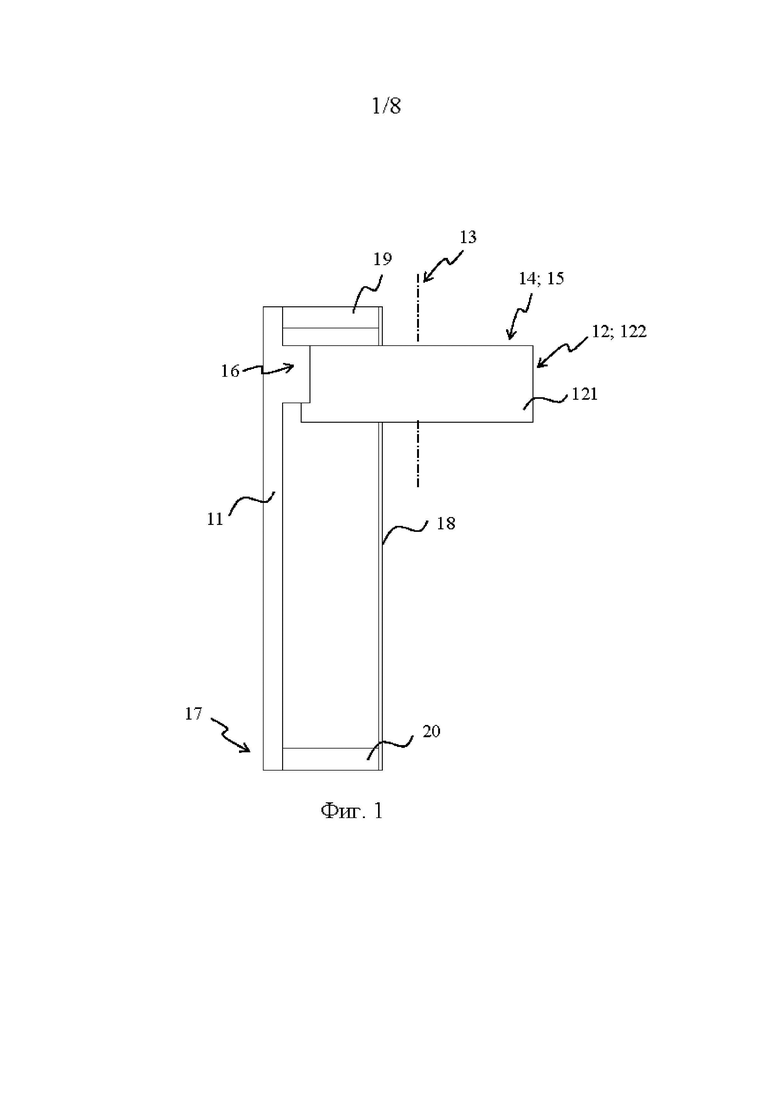
Фиг. 1 схематично изображает общий вид сбоку компонентов предложенного в качестве примера устройства формирования изображения, включающего признаки данного изобретения;
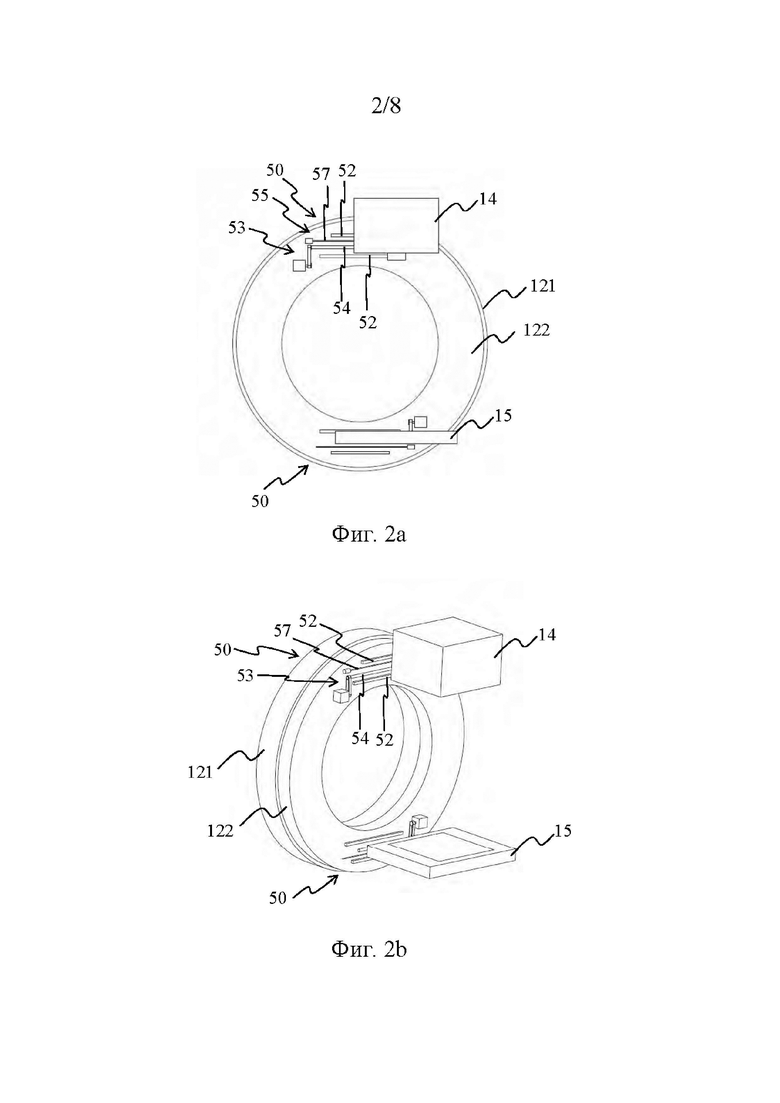
Фиг. 2а-2с изображают некоторые элементы конструкции предложенного в качестве примера варианта выполнения, включающего моторизованную направляющую конструкцию, расположенную в функциональном соединении с узлом формирования изображения данного устройства;
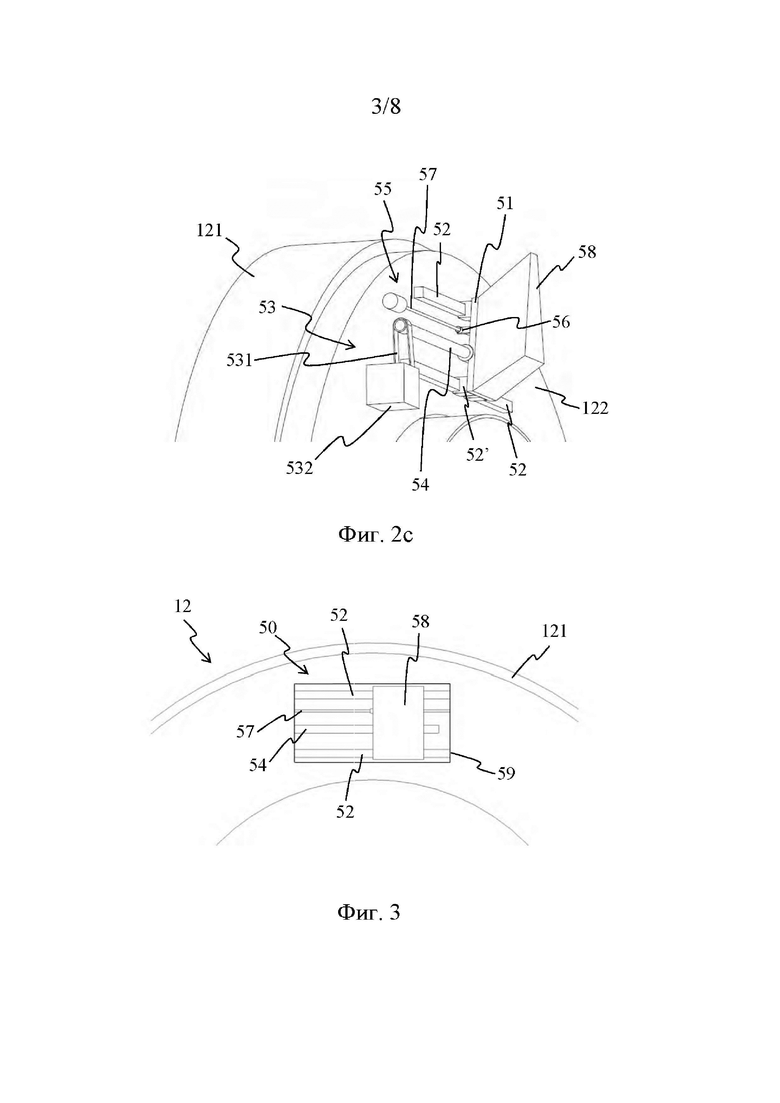
Фиг. 3 изображает направляющую конструкцию, показанную на Фиг. 2а-2с, частично закрытую корпусом опорной конструкции узла формирования изображения данного устройства;
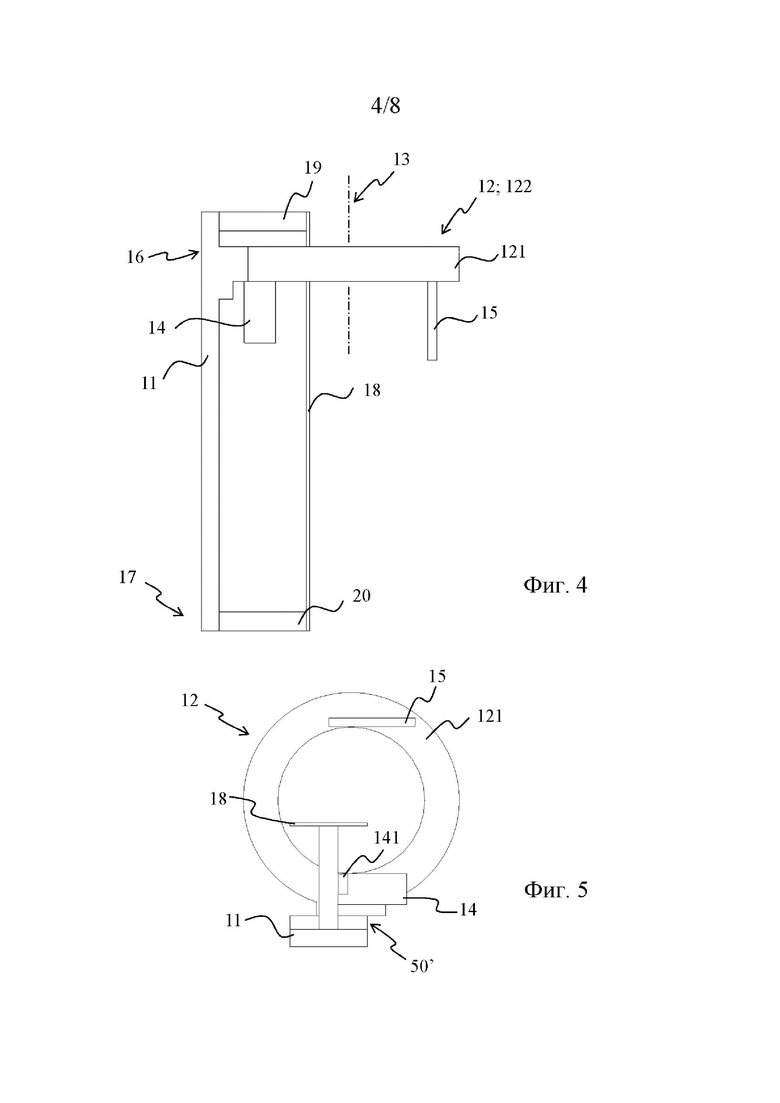
Фиг. 4 изображает вариант выполнения, в котором узел формирования изображения данного устройства расположен и проходит за пределами корпуса опорной конструкции этого узла;
Фиг. 5 схематично изображает общий вид того, как определенные элементы данного устройства могут быть перемещены в различные местоположения в пределах их определенных диапазонов перемещений;
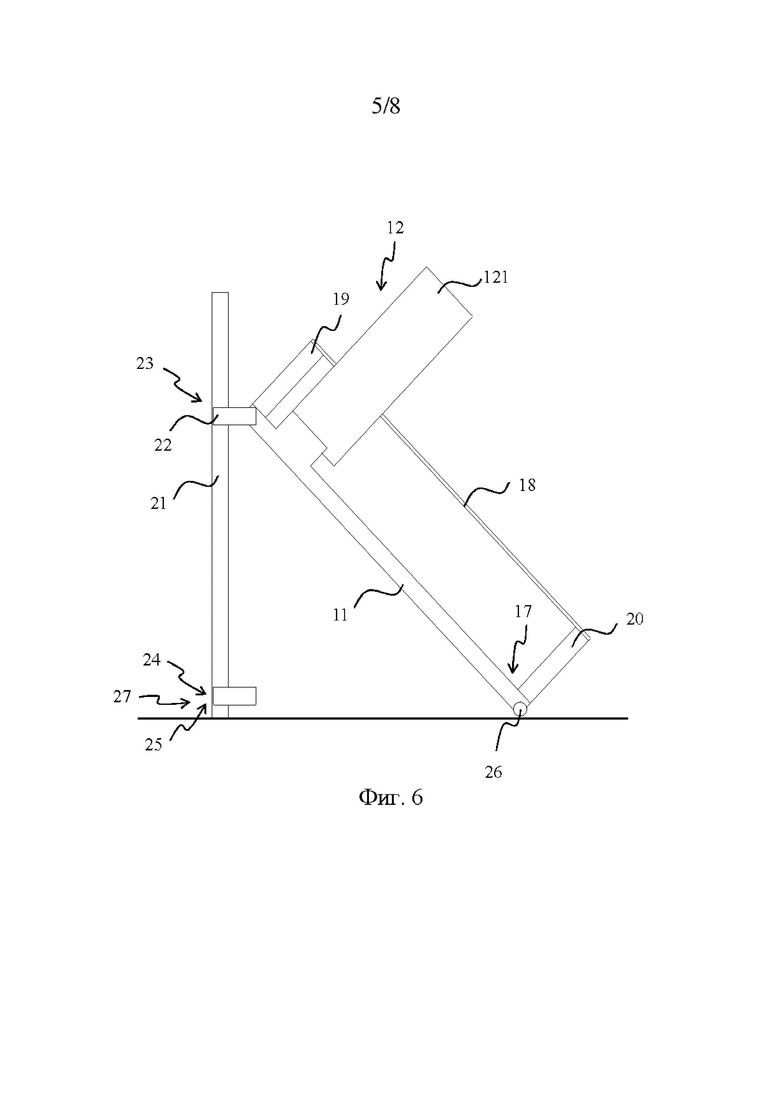
Фиг. 6 схематично изображает общий вид сбоку варианта выполнения, подобного показанному на Фиг. 1, снабженного элементами, обеспечивающими изменение ориентации;
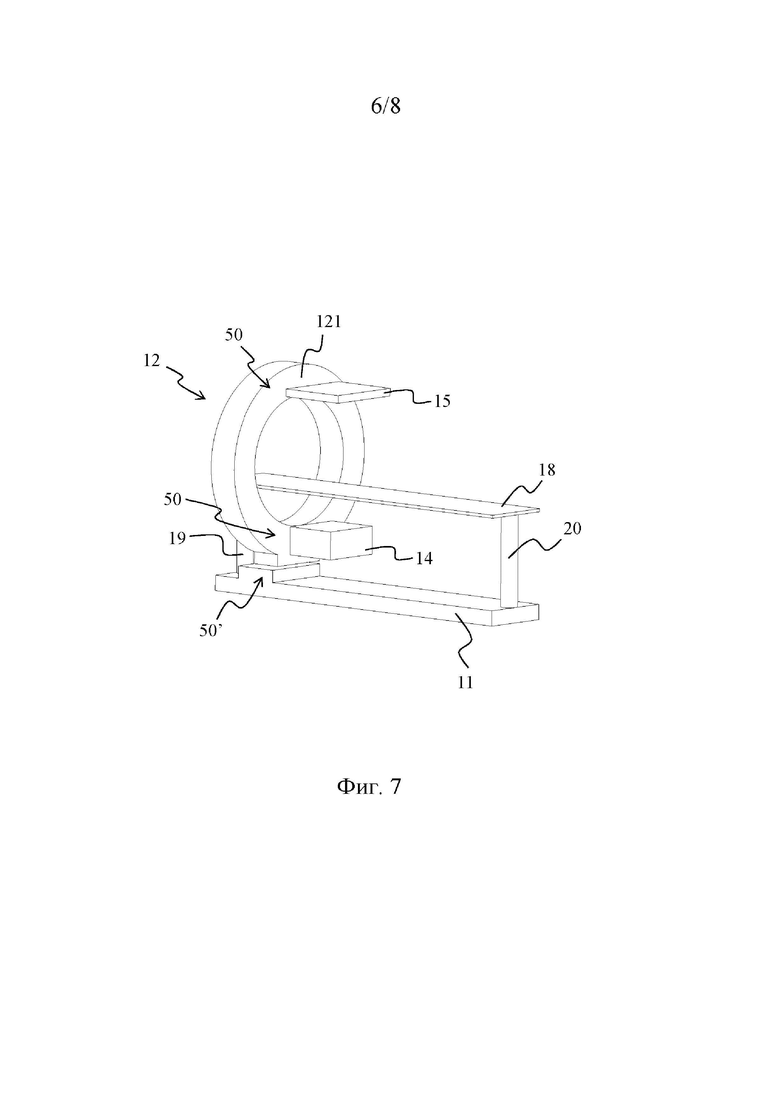
Фиг. 7 схематично изображает общий вид устройства в горизонтальном положении, при этом определенные компоненты перемещены в местоположения, соответствующие показанным на Фиг. 5;
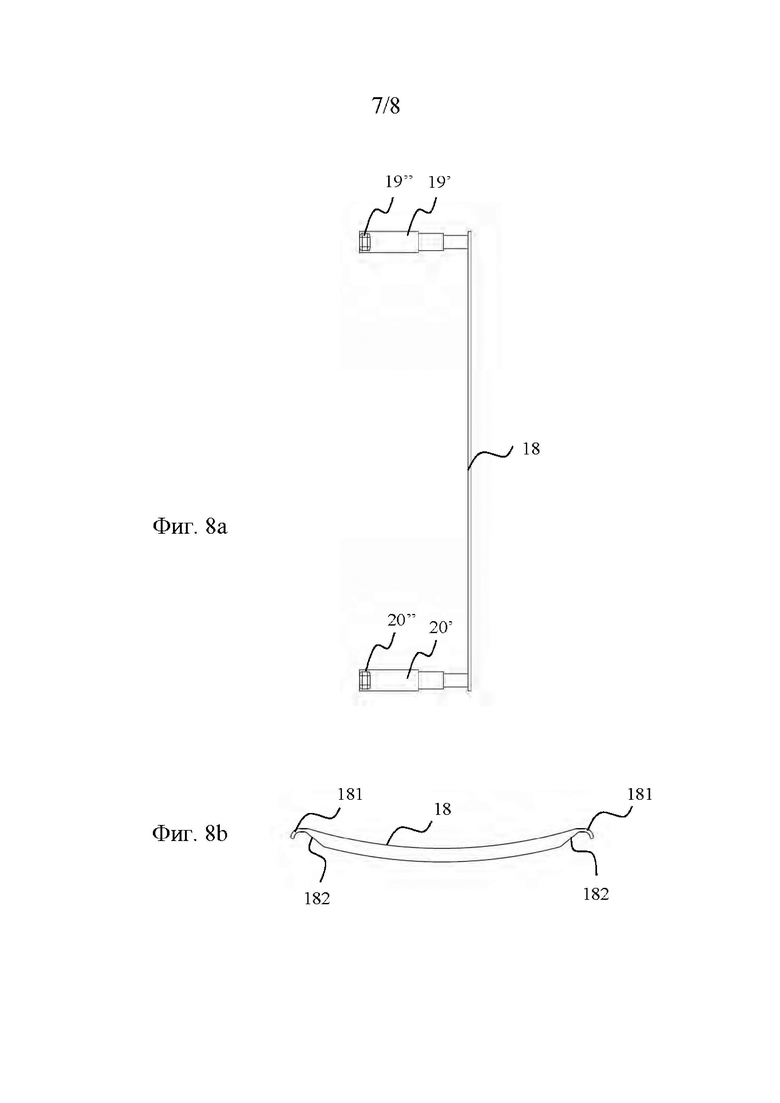
Фиг. 8а изображает в качестве примера некоторые детали опоры для пациента, подходящей для использования в предложенном устройстве;
Фиг. 8 изображает в качестве примера поперечный разрез опоры для пациента, которая может быть подобна показанной на Фиг. 3b;
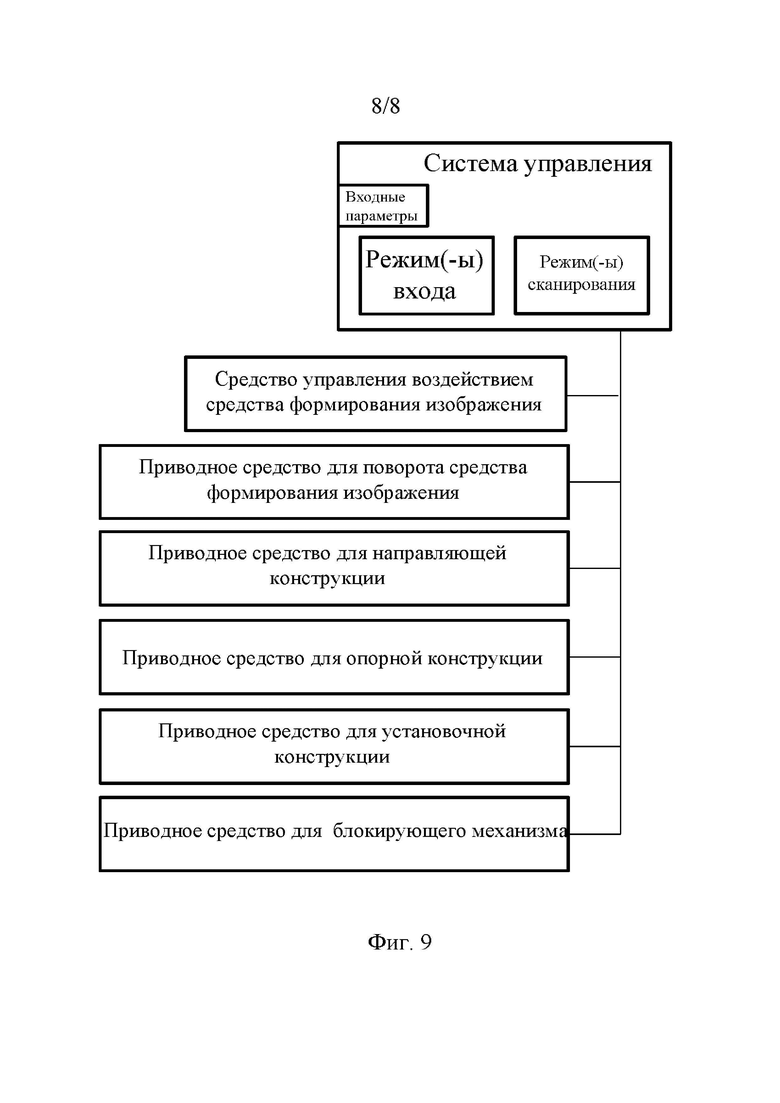
Фиг. 9 изображает блок-схему, иллюстрирующую пример системы управления данным устройством.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Более полное понимание компонентов, процессов и устройств, раскрытых в данном документе, можно получить, обратившись к сопутствующим чертежам. Данные чертежи являются лишь схематичными иллюстрациями, выполненными для удобства и простоты демонстрации данного изобретения, и, таким образом, не предназначены для определения относительных размеров и габаритов устройств или их компонентов и/или определения или ограничения объема примерных вариантов выполнения.
Несмотря на то, что в последующем описании для ясности используются специальные термины, эти термины предназначены только для обозначения конкретной конструкции вариантов выполнения, выбранной для иллюстрации на чертежах, и не предназначены для определения или ограничения объема изобретения. Следует понимать, что на чертежах и в последующем описании подобными ссылочными позициями обозначены компоненты с подобными функциями.
Указание элементов в единственном числе включает множественное число, если явным образом не указано иное.
Используемые в данном документе слова «примерно», «в целом» и «по существу» включают конструктивные или количественные модификации, которые не оказывают существенного влияния на назначение элемента или номера, указанного вместе с таким словом. Например, выражение «по существу» может включать диапазон отклонений, таких как 25%, или 10%, или 0% от заявленного отношения.
В описании и в формуле изобретения слово «содержащий» может включать такие варианты, как «состоящий из» и «состоящий по существу из». Используемые в настоящем документе слова «включает(-ют)», «имеет(-ют)», «имеющий», «имеет», «может», «состоит(-ят)» и их вариации являются открытыми переходными фразами, выражениями или словами, которые означают наличие названных элементов/этапов и допускают наличие других элементов/этапов.
На Фиг. 1 показано устройство, содержащее проходящую продольно рамную часть 11, проходящую в первом направлении и имеющую первый конец и второй конец. От этой проходящей продольно рамной части 11 или «удлиненной рамной части 11» во втором направлении проходит опорная конструкция 12, которая поддерживает источник 14 рентгеновского излучения и детектор 15 изображения (на Фиг. 1 не видны), причем второе направление по существу ортогонально первому направлению. Источник 14 рентгеновского излучения и детектор 15 изображения, которые вместе образуют узел 14, 15 формирования рентгеновского изображения, могут быть установлены на опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения по существу напротив друг друга в вариантах выполнения изобретения, при этом их положение также может быть регулируемым.
В то время, как устройства, подобные рассмотренным выше, зачастую содержат опору для пациента, на Фиг. 1 показана одна конкретная конструкция опоры 18 для пациента, механически соединенная с удлиненной рамной частью 11. Данная опора 18 для пациента, применимая в различных вариантах выполнения изобретения, которые подробнее рассмотрены далее, имеет поверхность, которая проходит по существу параллельно рамной части 11. В некоторых вариантах выполнения такая опора 18 для пациента является дополнительной, а в варианте выполнения на Фиг. 1 опора 18 для пациента имеет по существу такую же длину, что и рамная часть 11.
Согласно одному аспекту, например, длина рамной части 11 составляет порядка 240 см.
Согласно одному аспекту, например, длина рамной части 11 составляет от 220 см до 260 см.
Согласно одному аспекту, например, длина опоры 18 для пациента составляет 80-90% от длины рамной части 11.
Согласно одному аспекту, например, опора 18 для пациента имеет большую длину в первом направлении и меньшую длину во втором направлении, ортогональном указанному первому направлению.
Согласно одному аспекту, например, опора 18 для пациента по меньшей мере в указанном первом направлении по меньшей мере в преобладающей части является проницаемой для излучения.
Согласно одному аспекту, например, проницаемая для излучения часть опоры 18 по существу примерно той же длины, что и рамная часть 11.
Согласно одному аспекту, например, опора 18 для пациента по меньшей мере на одном из своих концов в указанном первом направлении содержит часть, которая не является проницаемой для излучения.
Согласно одному аспекту, например, длина проницаемой для излучения части опоры 18 для пациента в указанном первом направлении составляет 80-90% от длины рамной части 11.
Примеры того, как источник 14 рентгеновского излучения и детектор 15 изображения могут быть установлены на опорной конструкции 12 для образования узла 14, 15 формирования рентгеновского изображения, представлены ниже при обсуждении некоторых других чертежей данного изобретения, а на Фиг. 1 показано в целом, как опорная конструкция 12 для узла 14, 15 формирования рентгеновского изображения может содержать корпус 121, который закрывает кольцеобразную поворотную гентри 122, на которой установлен узел 14, 15 формирования рентгеновского изображения. В одном варианте выполнения корпус 121 проходит так, что он закрывает источник 14 рентгеновского излучения и детектор 15 формирования изображения, а в другом варианте выполнения корпус 121 гентри может закрывать конструкцию, с помощью которой источник 14 рентгеновского излучения и детектор 15 изображения соединены с гентри 122, но не друг с другом.
Узел 14, 15 формирования рентгеновского изображения может быть выполнен с возможностью поворота вокруг оси 13 поворота. В конкретной конструкции, показанной на Фиг. 1, схематично показывающей общий вид сбоку, как описано выше, данная ось 13 поворота совпадает или может совпадать с центральной осью опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения, корпуса 121 и поворотной гентри 122, как описано выше.
Так, например, согласно одному аспекту, явно не показанному на Фиг. 1, данное устройство содержит приводной механизм 16, выполненный с обеспечением возможности перемещения узла 14, 15 вокруг оси 13 поворота. Ось 13 поворота может быть физической осью или виртуальной осью поворота, как в случае на Фиг. 1.
Согласно одному аспекту, например, ось 13 поворота или центр поворота узла 14, 15 формирования рентгеновского изображения при обеспечении перемещения по криволинейной траектории и, таким образом, определении местоположения виртуальной оси 13 поворота совпадают с центральной осью 13 гентри 122.
Согласно одному аспекту ось 13 поворота является мгновенной (виртуальной) осью поворота, при этом, как обсуждалось выше, расположение мгновенной оси поворота относительно центральной оси опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения, корпуса 121 и/или поворотной гентри 122 может быть изменено.
Согласно одному аспекту по меньшей мере один из компонентов, источник 14 рентгеновского излучения или детектор 15 изображения, выполнен с возможностью бокового перемещения из положения, точно противоположного другому компоненту.
Согласно одному аспекту опорная конструкция 12 для узла 14, 15 формирования рентгеновского изображения содержит гентри 122, имеющую центральную ось, при этом конструктивные части устройства обеспечивают по меньшей мере одно из следующего: боковое перемещение источника 14 рентгеновского излучения между положениями, в которых центральный луч, генерируемый источником, совпадает с центральной осью гентри 122, и положением, в котором центральный луч, генерируемый источником, не совпадает с центральной осью гентри 122; боковое перемещение детектора 15 изображения между положениями, в которых вектор, нормальный к поверхности детектора в центральной части детектора 15, совпадает с центральной осью гентриы 122, и положением, в котором вектор, нормальный к поверхности детектора в центральной части детектора 15, не совпадает с центральной осью гентри 122. Боковое перемещение узла 14, 15 может включать перемещение узла 14, 15 в положение, в котором они обращены друг к другу, при этом центральный луч, генерируемый источником 14 рентгеновского излучения, не совпадает с центральной осью гентри 122, а вектор, нормальный к поверхности детектора в центральной части детектора 15, не совпадает с центральной осью гентри 122.
Поворот поворотной гентри 122 может выполняться любым обычным механизмом, известным специалистам в данной области. В одном варианте выполнения имеется приводной ремень, приводимый в действие по меньшей мере одним роликом и проходящий вокруг кольцеобразной поворотной гентри 122. Такая конструкция обеспечивает возможность поворота гентри 122 на угол, даже превышающий 360 градусов.
Согласно другому аспекту изобретения к устройству прикреплен еще один приводной механизм 17, обеспечивающий перемещение опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения вперед и назад в направлении, которое по существу параллельно направлению, в котором проходит удлиненная рамная часть 11. Согласно одному аспекту приводной механизм 17 может быть выполнен с обеспечением возможности перемещения опорной конструкции 12 вдоль или рядом с рамной частью 11.
Согласно одному аспекту приводной механизм 17, обеспечивающий перемещение опорной конструкции 12 в направлении, которое по существу параллельно направлению, в котором проходит рамная часть 11, может содержать двигатель, прикрепленный к опорной конструкции 12 для узла 14, 15.
Независимо от деталей конструкции приводного механизма 17 для приведения в движение опорной конструкции 12 вдоль или рядом с удлиненной рамной частью 11, в одном варианте выполнения конструкция данного устройства обеспечивает перемещение опорной конструкции 12 по существу по всей длине между указанными первым и вторым концами удлиненной рамной части 11.
В то время, как детали приводного механизма 17 для перемещения опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения вперед и назад в направлении, которое по существу параллельно направлению, в котором проходит удлиненная рамная часть 11, могут быть различными, один предпочтительный пример такого механизма раскрыт в находящейся на совместном рассмотрении патентной заявке FI 20190054, которая включена в настоящий документ посредством ссылки.
Устройство согласно данному изобретению может быть описано как стоматологическое или медицинское устройство формирования изображения для компьютерной томографии, которое содержит:
- первую проходящую продольно рамную часть 11, имеющую первый конец и второй конец,
- опорную конструкцию 12, проходящую от указанной рамной части 11 во втором направлении по существу под прямым углом к указанному первому направлению,
- источник 14 рентгеновского излучения и детектор 15 изображения, которые вместе образуют узел 14, 15 формирования рентгеновского изображения, установленный на опорной конструкции 12;
- первый приводной механизм 16, предназначенный для обеспечения перемещения узла 14, 15 вокруг виртуальной или физической оси 13 поворота.
Система управления данным устройством может иметь по меньшей мере один режим работы для управления первым приводным механизмом 16, как определено выше, и одновременного управления узлом 14, 15 формирования рентгеновского изображения.
На Фиг. 2а-2с показаны в качестве примера некоторые конструктивные детали одного возможного варианта выполнения изобретения. На Фиг. 2а-2с часть корпуса 121 опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения удалена, что делает видимой, например, направляющую конструкцию 50, которая может находиться в функциональном соединении с по меньшей мере одним из источника 14 рентгеновского излучения и детектора 15 изображения. Согласно одному варианту выполнения направляющая конструкция 50 является моторизованной.
В то время как на Фиг. 2а-2с показаны две направляющие конструкции 50, которые обеспечивают боковое перемещение источника 14 рентгеновского излучения и детектора 15 изображения относительно их опорной конструкции 12 или относительно гентри 122, согласно одному варианту выполнения только один из источника 14 рентгеновского излучения и детектора 15 изображения снабжен направляющей конструкцией 50.
Боковое перемещение источника 14 рентгеновского излучения и/или детектора 15 изображения относительно опорной конструкции 12, или гентри 122, может быть обеспечено в плоскости, перпендикулярной оси 13 поворота, вокруг которой обеспечен поворот узла 14, 15.
Согласно одному аспекту, например, указанная по меньшей мере одна направляющая конструкция 50, описанная в данном документе, установлена на кольцеобразной гентри 122, расположенной на опорной конструкции 12, поддерживающей узел 14, 15 формирования рентгеновского изображения.
Диапазон указанного бокового перемещения источника 14 рентгеновского излучения, или детектора 15 изображения, или их обоих, обеспечиваемый направляющей конструкцией 50, может включать основное положение и первое и второе крайние положения, находящиеся в противоположных направлениях от основного положения.
Хотя на Фиг. 2а-2с показан вариант выполнения, в котором конструктивно идентичные направляющие конструкции 50 выполнены как для источника 14 рентгеновского излучения, так и для детектора 15 изображения, и показаны разные детали направляющей конструкции 50, причем для ясности чертежей не все компоненты видны на них, не все компоненты представлены на каждой из Фиг. 2а-2с с соответствующим номером позиции.
Согласно одному аспекту данное устройство содержит направляющую конструкцию 50 для по меньшей мере одного из источника 14 рентгеновского излучения и детектора 15 изображения, причем направляющая конструкция 50 содержит ходовую часть 51 (видна на Фиг. 2с), установленную на источнике 14 рентгеновского излучения и/или детекторе 15 изображения для обеспечения бокового перемещения по меньшей мере одного из источника 14 и детектора 15. Диапазон бокового перемещения ходовой части 51 может включать основное положение и первое и второе крайние положения, находящиеся в противоположных направлениях от основного положения.
Кроме того, согласно одному аспекту указанная по меньшей мере одна направляющая конструкция 50 содержит по меньшей мере одну направляющую канавку или рельс 52 на стороне опорной конструкции 12 или гентри 122 и сопрягаемую конструкцию 52' на стороне ходовой части 51 (также видна на Фиг. 2с).
Согласно одному аспекту указанная по меньшей мере одна направляющая конструкция 50 может содержать моторизованную конструкцию 53, находящуюся в функциональном соединении с ходовой частью 51, причем моторизованная конструкция 53 обеспечивает боковое перемещение источника 14 рентгеновского излучения и/или детектора 15 изображения в диапазоне, включающем указанные первое и второе крайние положения источника 14 и/или детектора 15.
Согласно одному аспекту моторизованная конструкция 53 может содержать ведущий винт 54, который расположен параллельно указанной по меньшей мере одной направляющей канавке или рельсу 52 и находится в функциональном соединении с ходовой частью 51. Согласно варианту выполнения, показанному на Фиг. 2а-2с, ведущий винт 54 установлен с возможностью поворота с помощью ремня 531, который выполнен с возможностью приведения во вращение с помощью двигателя 532, при этом вместо него возможно использование другой конструкции для поворота ведущего винта 54.
Согласно еще одному аспекту направляющая конструкция 50 может содержать узел 55 датчика положения, выполненный с возможностью получения информации, относящейся к положению источника 14 рентгеновского излучения и/или детектора 15 изображения в диапазоне бокового перемещения по меньшей мере одного из источника 14 и детектора 15.
Согласно одному аспекту узел 55 датчика положения может быть выполнен с возможностью определения положения ходовой части 51 в диапазоне ее бокового перемещения.
Согласно еще одному аспекту между указанной по меньшей мере одной направляющей конструкцией 50 и системой управления данным устройством может быть обеспечен путь передачи сигнала.
Согласно одному аспекту путь передачи сигнала может включать путь передачи сигнала между узлом 55 датчика положения и системой управления данного устройства.
Согласно одному аспекту узел 55 датчика положения является узлом 55 датчика абсолютного положения.
Согласно одному аспекту узел 55 датчика абсолютного положения может содержать магнитный компонент 56, конструктивно соединенный с ходовой частью 51 и подвижно соединенный со стержнем 57, проходящим параллельно указанной по меньшей мере одной направляющей канавке или рельсу 52 и ведущему винту 54.
Согласно одному аспекту первая проходящая продольно рамная часть 11 проходит горизонтально или выполнена с возможностью перемещения так, чтобы проходить горизонтально, а моторизованная конструкция 53 направляющей конструкции 50 выполнена самоподдерживающейся относительно всех i) положений по меньшей мере одного из источника 14 рентгеновского излучения и детектора 15 изображения в пределах диапазона их бокового перемещения и ii) положений поворота, при которых первый приводной механизм 16 обеспечивает перемещение источника 14 рентгеновского излучения и детектора 15 изображения вокруг виртуальной или физической оси 13 поворота.
Как показано на Фиг. 3 и 4, согласно одному аспекту опорная конструкция 12 для узла 14, 15 формирования рентгеновского изображения содержит корпус 121 кольцеобразной гентри, в котором расположены i) указанная по меньшей мере одна направляющая конструкция 50 и также дополнительно ii) первый приводной механизм 16, обеспечивающий перемещение узла 14, 15 вокруг виртуальной или физической оси 13 поворота, причем источник 14 рентгеновского излучения и детектор 15 изображения выполнены с возможностью расположения или прохождения за пределами корпуса 121 кольцеобразной гентри.
Согласно одному варианту выполнения источник 14 рентгеновского излучения и детектор 15 изображения проходят с одной и той же стороны корпуса 121 кольцеобразной гентри, и эта сторона корпуса 121 может содержать другим образом закрытую поверхность, на которой имеется отверстие 59 для по меньшей мере одного из источника 14 рентгеновского излучения и детектора 15 изображения. Отверстие 59 может иметь такие размеры, которые обеспечивают диапазон бокового перемещения источника 14 и/или детектора 15, задаваемый с помощью указанной по меньшей мере одной направляющей конструкции 50.
На Фиг. 2с и 3 показан вариант выполнения, содержащий установочный кронштейн 58, который выполнен с возможностью прохождения через отверстие 59 в корпусе 121 гентри. Установочный кронштейн 58 может быть закреплен на ходовой части 51 с одной стороны и на источнике 14 рентгеновского излучения и/или детекторе 15 изображения с другой стороны. Как показано на Фиг. 2с и 3, возможно использование установочных кронштейнов 58 разных размеров.
Согласно одному варианту выполнения источник 14 рентгеновского излучения и/или детектор 15 изображения могут содержать корпус для источника 14 и/или детектора 15, который имеет такие конструкцию и размеры, что во всех положениях в пределах диапазона бокового перемещения по меньшей мере одного из источника 14 и детектора 15 корпус закрывает отверстие 59, через которое проходит установочный кронштейн 58.
Согласно одному аспекту данное устройство может содержать две направляющие конструкции 50, первую для источника 14 рентгеновского излучения и вторую для детектора 15 изображения. Направляющие конструкции 50 могут содержать одинаковое количество компонентов с одинаковыми функциями, образуя одинаково функционирующие узлы. Указанные первая и вторая направляющие конструкции могут быть идентичны, причем дополнительно установочный кронштейн 58 может быть другим и предназначен специально для источника 14 рентгеновского излучения и для детектора 15 изображения.
Согласно одному аспекту и со ссылкой на Фиг. 4, корпус 121 опорной конструкции 12 для узла 15, 16 формирования рентгеновского изображения не вмещает узел 14, 15 формирования рентгеновского изображения, но действует в основном или исключительно как корпус, например, для кольцеобразной гентри 122, на которой установлен узел 14, 15, и для конструкций, расположенных на данном устройстве для приведения в действие узла 14, 15 вокруг оси 13 поворота. Такое решение обеспечивает выполнение более легкой опорной конструкции 12 для узла 14, 15 и обеспечивает возможность лучшего доступа для пациентов и персонала к объему формирования изображения внутри узла 14, 15, а также облегчает для персонала четкую зрительную линию на объем формирования изображения внутри корпуса 121, в котором должен быть расположен пациент для воздействия.
Касательно доступа к объему внутри узла 14, 15 формирования рентгеновского изображения, на Фиг. 5 показано, как определенные компоненты данного устройства могут быть перемещены в различные местоположения в диапазонах перемещений, предназначенных для них. Согласно данному варианту выполнения, несмотря на то, что рассмотренные выше варианты выполнения изобретения для перемещения в боковом направлении по меньшей мере одного из источника 14 рентгеновского излучения и детектора 15 изображения могут быть использованы для облегчения доступа пациента внутрь опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения, в данном устройстве может быть расположена другая конструктивно подобная конструкция или другая конструкция с подобным функционированием также для перемещения в боковом направлении опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения относительно удлиненной рамной части 11. Благодаря встраиванию в данное устройство такого механизма 50' линейного перемещения, например, возможно обеспечение еще большего пространства для размещения пациента в зоне формирования изображения и последующего надлежащего расположения для воздействия.
Таким образом, согласно одному аспекту данное устройство также содержит механизм 50' линейного перемещения, выполненный с обеспечением возможности перемещения опорной конструкции 12 для узла формирования рентгеновского изображения относительно рамной части 11 в направлении, которое находится под прямым углом к направлению, в котором проходит рамная часть 11, причем диапазон линейного перемещения опорной конструкции 12 включает основное положение относительно первой рамной части 11 и первое и второе крайние положения.
Когда опорная конструкция 12 для узла 14, 15 формирования рентгеновского изображения проходит в направлении под прямым углом к проходящей продольно рамной части 11, направление, в котором механизм 50' линейного перемещения перемещает опорную конструкцию 12 для узла 14, 15 относительно рамной части 11, также находится под прямым углом к данному направлению.
Касательно основного положения, обеспечиваемого механизмом 50' линейного перемещения для опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения, а также обеспечиваемого направляющей конструкцией 50 для узла формирования рентгеновского изображения, в вариантах выполнения основным положением может быть любое из указанных первого или второго крайних положений.
Далее приведены различные примеры использования степеней свободы для перемещения различных компонентов данного устройства, которые обеспечены в различных вариантах выполнения данного устройства.
Согласно одному аспекту и со ссылкой на Фиг. 5 в соединении с источником 14 рентгеновского излучения расположен светоизлучающий компонент 141. Этот светоизлучающий компонент 141 может быть выполнен с возможностью проецирования светового пучка той же формы, что и форма рентгеновского пучка, который излучает источник 14 рентгеновского излучения, или может быть настроен для его излучения. Такой светоизлучающий компонент 141 может быть установлен на той же направляющей конструкции 50, что и источник 14 рентгеновского излучения, например, в виде компонента, отдельного от источника 14 рентгеновского излучения, так, что он может быть подвижно установлен относительно остальных компонентов данного устройства. Диапазон бокового перемещения направляющей конструкции 50 предпочтительно обеспечен так, что источник 14 рентгеновского излучения и светоизлучающий компонент 141 могут быть расположены в одном и том же месте в пределах диапазона перемещения, обеспечиваемого направляющей конструкцией 50, и такая конфигурация обеспечивает новое расположение, благодаря которому возможно направление позиционирующего света на объект, изображение которого необходимо сформировать, из того же места, в котором должно происходить или брать начало фактическое воздействие формирования рентгеновского изображения.
Согласно другому аспекту система управления данным устройством содержит входные параметры для режима входа пациента, причем режим входа пациента включает управление указанной по меньшей мере одной направляющей конструкцией 50 для приведения по меньшей мере одного из источника 14 рентгеновского излучения и детектора 15 изображения в положение, более близкое к указанному первому крайнему положению, чем к указанному второму крайнему положению, в диапазоне бокового перемещения источника 14 и/или детектора 15.
Согласно одному аспекту данное устройство содержит направляющую конструкцию 50 как для источника 14 рентгеновского излучения, так и для детектора 15 изображения, а система управления данным устройством включает входные параметры для режима входа пациента, согласно которым направляющие конструкции 50 приводятся в действие для расположения как источника 14, так и детектора 15 ближе к указанному первому крайнему положению, чем к указанному второму крайнему положению, в диапазонах бокового перемещения источника 14 и детектора 15.
Согласно другому аспекту данное устройство содержит направляющую конструкцию 50 как для источника 14 рентгеновского излучения, так и для детектора 15 изображения, а система управления данного устройства включает входные параметры для режима входа пациента, которые включают управление направляющими конструкциями 50 для перемещения источника 14 и детектора 15 в одинаковом направлении, чтобы расположить их ближе к указанному первому крайнему положению, чем к указанному второму крайнему положению, в диапазонах бокового перемещения источника 14 и детектора 15.
Согласно другому аспекту система управления данного устройства включает входные параметры для режима входа пациента, которые включают приведение в действие механизма 50' линейного перемещения, чтобы расположить опорную конструкцию 12 для узла формирования рентгеновского изображения ближе к указанному первому крайнему положению, чем к указанному второму крайнему положению, в пределах диапазона линейного перемещения опорной конструкции 12.
Согласно одному аспекту система управления данного устройства включает входные параметры для режима входа пациента, причем режим входа пациента включает комбинацию указанных двух вышеописанных или других режимов входа пациента, например, для расположения узла 14, 15 формирования рентгеновского изображения и их опорной конструкции 12 в том же направлении или в противоположных направлениях от их основных положений.
Согласно одному аспекту система управления данного устройства включает входные параметры для режима входа пациента, согласно которым указанной по меньшей мере одной направляющей конструкций 50 управляют так, чтобы привести по меньшей мере один из источника 14 рентгеновского излучения и детектора 15 изображения в положение, более близкое к указанному первому крайнему положению, чем к указанному второму крайнему положению, в диапазоне бокового перемещения источника 14 и/или детектора 15, и управляют механизмом 50' линейного перемещения для приведения опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения в положение, более близкое к тому из крайних положений в диапазоне линейного перемещения опорной конструкции 12 для узла 14, 15, которое находится ближе к положению, в которое приведен источник 14 рентгеновского излучения и/или детектор 15 изображения, в диапазоне бокового перемещения источника 14 и/или детектора 15.
Согласно одному аспекту режим входа пациента включает управление посредством системы управления первым приводным механизмом 16 для перемещения узла 14, 15 формирования рентгеновского изображения вокруг оси 13 поворота для приведения источника 14 рентгеновского излучения и детектора 15 изображения в поворотное положение, в котором указанная по меньшей мере одна направляющая конструкция 50 расположена так, что направление перемещения, обеспеченное указанной по меньшей мере одной направляющей конструкцией 50, перпендикулярно направлению, в котором проходит первая проходящая продольно рамная часть 11.
Вышеуказанные режимы входа пациента могут быть осуществлены, когда конструкция данного устройства содержит источник 14 рентгеновского излучения и детектор 15 изображения, проходящие за пределы корпуса 121 гентри.
На Фиг. 6 в качестве примера показан схематичный общий вид сбоку конкретных компонентов варианта выполнения, в котором дополнительно к тому, что можно назвать первой удлиненной рамной частью 11, описанной выше, имеется вторая удлиненная рамная часть 21, механически соединенная с первой удлиненной рамной частью 11 и имеющая по существу такую же длину, что и первая удлиненная рамная часть 11.
Согласно одному аспекту и со ссылкой на Фиг. 6, вблизи указанного первого конца удлиненных рамных частей 11, 12 расположена шарнирная соединительная конструкция 22 для механического соединения указанных первой и второй удлиненных рамных частей 11, 21, предназначенная для обеспечения наклона первой удлиненной рамной части 11 вокруг по меньшей мере одной оси наклона относительно второй удлиненной рамной части 21. Указанная по меньшей мере одна ось наклона может быть осью, которая ортогональна направлению, в котором проходят указанные первая и вторая удлиненные рамные части 11, 21, а также направлению, в котором проходит опорная конструкция 12 для узла 14, 15 формирования рентгеновского изображения - перпендикулярно от первой рамной части 11.
В вариантах выполнения, показанных на Фиг. 6, указанная по меньшей мере одна ось наклона проходит горизонтально. Это не означает, что ось наклона должна быть горизонтальной.
Согласно другому аспекту на стороне второй удлиненной рамной части 21 расположена установочная конструкция 23, которая явно не видна на Фиг. 6 и находится в соединении с шарнирной соединительной конструкцией 22. Установочная конструкция 23 установлена с возможностью перемещения вдоль или параллельно второй удлиненной рамной части 21.
Согласно другому аспекту, например, вблизи указанного второго конца второй удлиненной рамной части 21 расположен блокирующий механизм 24, обеспечивающий соединение и разъединение указанных первой и второй удлиненных рамных частей 11, 21. В частности, блокирующий механизм 24 может быть расположен вблизи указанного второго конца указанных первой и второй удлиненных рамных частей 11, 21 и выполнен с возможностью обеспечения соединения вместе и разъединения указанных первой и второй удлиненных рамных частей 11, 21 вблизи их указанных вторых концов.
Когда вторая удлиненная рамная часть 21 установлена неподвижно и блокирующий механизм 24 не соединяет указанные первую и вторую удлиненные рамные части 11, 21, указанный второй конец первой удлиненной рамной части 11 может перемещаться в боковом направлении, при этом шарнирное соединение 22 между рамными частями 11, 21 обеспечивает возможность поворота первой удлиненной рамной части 11 вокруг горизонтальной оси наклона вблизи указанного первого конца первой удлиненной рамной части 11. При вертикальном исходном положении такая подвижно установленная установочная конструкция, как описано выше, обеспечивает опускание и подъем указанного первого конца первой удлиненной рамной части 11.
Конструкция, обеспечивающая наклон первой удлиненной рамной части 11 и опускание и подъем указанного первого конца первой удлиненной рамной части 11, а также конструкция блокирующего механизма 24, описанная выше, могут быть различными, и примеры таких конструкций подробнее раскрыты в находящейся на совместном рассмотрении патентной заявке FI 20190054, которая включена в настоящий документ посредством ссылки.
На Фиг. 6 показано устройство согласно Фиг. 1 на этапе, когда указанный первый конец первой удлиненной рамной части 11 перемещен вниз, а указанный второй конец первой удлиненной рамной части 11 перемещен горизонтально на поверхности. Устройство на Фиг. 6 может быть выполнено с возможностью обеспечения опускания указанного первого конца первой рамной части 11 вплоть до места вблизи указанного второго конца второй рамной части 21.
Согласно еще одному аспекту, который явно не виден на Фиг. 6, в функциональном соединении со второй удлиненной рамной частью 21 расположен приводной механизм 27 для перемещения установочной конструкции 23 вдоль или параллельно второй удлиненной рамной части 21. При механическом соединении с первой удлиненной рамной частью 11, вблизи ее указанного первого конца, приводной механизм 27 может перемещать указанный первый конец первой рамной части 11 в направлении, в котором проходит вторая рамная часть 21.
Приводной механизм 27 для приведения в действие установочной конструкции 23 может быть конструкцией, подобной приводному механизму 17, приводящему в действие опорную конструкцию 12 узла 14, 15 формирования рентгеновского изображения вдоль или параллельно первой удлиненной рамной части 11.
Согласно одному аспекту приводной механизм 27 для приведения в действие установочной конструкции 23 содержит цепной привод.
Для описания некоторых из рассмотренных выше признаков другими словами, в одном из вариантов выполнения изобретения в механическом соединении с шарнирной соединительной конструкцией 22 на стороне второй удлиненной рамной части 21 расположена установочная конструкция 23, которая установлена с возможностью перемещения вдоль или параллельно второй удлиненной рамной части 21, и такая конструкция обеспечивает степень свободы перемещения вдоль или параллельно второй рамной части 21 для шарнирной соединительной конструкции 23 и для указанного первого конца первой удлиненной рамной части 11, механически соединенного с шарнирной соединительной конструкцией 23.
В одном варианте выполнения установочная конструкция 23 установлена с возможностью перемещения вдоль или параллельно второй удлиненной рамной части 21 по меньшей мере по существу на расстояние, соответствующее длине первой удлиненной рамной части 11, а шарнирная соединительная конструкция 22 установлена с обеспечением возможности наклона первой удлиненной рамной части 11 между ориентациями, в которых указанные первая и вторая удлиненные рамные части 11, 21 проходят по существу параллельно и в которых эти рамные части 11, 21 проходят по существу ортогонально.
Согласно еще одному аспекту блокирующий механизм 24 содержит механизм 25 смещения, который явно не виден на Фиг. 6, для перемещения указанного второго конца первой удлиненной рамной части 11 на расстояние от второй удлиненной рамной части 21, когда блокирующий механизм 24 разъединяет первую и вторую удлиненные рамные части 11, 21.
Согласно другому аспекту, не показанному подробно на Фиг. 6, блокирующий механизм 24 содержит средство с приводом от двигателя с сопрягаемыми компонентами на стороне моторизованной конструкции и первой удлиненной рамной части 11, соответственно.
Блокирующий механизм 24 также может содержать направляющую конструкцию, выполненную с возможностью направления указанного второго конца первой удлиненной рамной части 11 прямо на блокирующий механизм 24 при перемещении указанного второго конца первой удлиненной рамной части 11 к блокирующему механизму 24 или, другими словами, при перемещении указанного второго конца первой удлиненной рамной части 11 по направлению к указанному второму концу второй удлиненной рамной части 21 и приближении к нему.
Согласно еще одному аспекту, как показано в качестве примера на Фиг. 6, первая удлиненная рамная часть 11 вблизи своего второго конца содержит по меньшей мере одно колесо или ролик 26.
Согласно другому аспекту вместо колеса или ролика на указанном втором конце первой удлиненной рамной части 11 может быть расположена конструкция, выполненная с возможностью скольжения по поверхности.
На Фиг. 7 схематично показан общий вид устройства, в качестве примера, проходящего в горизонтальном направлении. Хоть это и не показано на Фиг. 7, данное устройство может содержать конструкции, описанные для Фиг. 6, которые обеспечивают изменение направления, в котором проходит удлиненная рамная часть 11. Опорная конструкция 12 для узла 14, 15 формирования рентгеновского изображения на Фиг. 7 не аналогична конструкции на Фиг. 6, но на Фиг. 7 показаны определенные компоненты устройства, перемещенные в положения, соответствующие показанным на Фиг. 5 и описанным выше для режимов входа пациента.
Согласно еще одному аспекту, как показано на Фиг. 8а, соединительная конструкция 19, 20, которая обеспечивает механическое соединение опоры 18 для пациента с удлиненной рамной частью 11, может содержать механизм 19', 20' регулирования опоры для пациента, обеспечивающий возможность смещения опоры 18 ближе к (первой) рамной части 11 и дальше от нее.
Согласно другому аспекту в функциональном соединении с механизмом 19', 20' регулирования опоры для пациента находится приводной механизм 19'', 20'' опоры для пациента.
Согласно другому аспекту механизм 19', 20' регулирования опоры для пациента может содержать первый механизм 19' регулирования, расположенный вместе с его приводным механизмом 19'', содержащимся в приводном механизме 19'', 20'' опоры для пациента, по существу на указанном первом конце удлиненной рамной части 11, и второй механизм 20' регулирования, расположенный вместе с его приводным механизмом 20'', содержащимся в приводном механизме 19'', 20', по существу на указанном втором конце удлиненной рамной части 11.
Согласно одному аспекту, например, механизмы 19', 20' регулирования опоры для пациента расположены в функциональном соединении с системой управления данного устройства, причем система управления выполнена с возможностью управления приводным механизмом 19'', 20'' опоры для пациента механизма 19', 20' регулирования опоры для пациента.
Согласно одному аспекту, например, система управления выполнена с возможностью управления соединительной конструкцией 19, 20, содержащей первый механизм 19' регулирования с его приводным механизмом 19'', расположенный по существу на указанном первом конце (первой) удлиненной рамной части 11, и второй механизм 20' регулирования с его приводным механизмом 20'', расположенный по существу на указанном втором конце (первой) удлиненной рамной части 11, для удерживания на первом и втором концах рамной части 11 с обеспечением одинакового расстояния между (первой) удлиненной рамной частью 11 и опорой 18 для пациента при регулировании расстояния между ними.
Согласно другому аспекту расстояние между концами (первой) удлиненной рамной части 11 и опоры 18 для пациента может быть отрегулировано так, чтобы быть разным.
Согласно одному аспекту, как показано на Фиг. 8b, учитывая вышеописанное первое направление опоры 18, ее основная часть в поперечном сечении является изогнутой для обеспечения лучшей опоры для пациента на вогнутой поверхности опоры 18.
Согласно еще одному аспекту, как показано на Фиг. 8b, на краях 181 данного поперечного сечения опоры 18 для пациента форма поперечного сечения изогнута в противоположном направлении.
Согласно еще одному аспекту, как показано на Фиг. 8b, рядом с краями вышеописанного поперечного сечения опоры 18 для пациента и на стороне, противоположной основной части вогнутой поверхности, расположена удерживающая конструкция 182. Удерживающая конструкция 182 может быть, например, удлиненной рукояткой или крепежной конструкцией для вставки ремня, проходящего на вогнутой стороне опоры 18 или поверх нее, предназначенной для использования в качестве дополнительной опоры для пациента и, таким образом, обеспечения неподвижности во время процесса формирования изображения.
Согласно одному аспекту, как в целом уже упоминалось выше, различные степени свободы перемещения компонентов данного устройства могут обеспечить преимущество при расположении пациента или, точнее, анатомическом положении для воздействия. В качестве примера, рассматривая ситуацию, когда необходимо исследовать плечо пациента в положении лежа на опоре 18 для пациента, подобной описанной выше, сначала можно привести опору 18 в такое положение по высоте, в котором пациенту легче всего забраться на опору 18. Затем, когда пациент лежит на опоре 18, по меньшей мере одно из i) положения опоры 18 по высоте, II) горизонтального положения опорной конструкции 12 для узла 14, 15 формирования рентгеновского изображения и iii) положения по меньшей мере одного из источника 14 рентгеновского излучения и детектора 15 изображения в диапазоне заданного для них бокового перемещения может быть отрегулировано так, чтобы желаемое анатомическое положение оказалось в поле видимости устройства. Это, очевидно, обеспечивается в пределах степеней свободы перемещения компонентов устройства, расположенных в нем.
Кроме того, что конструкции согласно вариантам выполнения изобретения обеспечивают вход и расположение пациента, как описано выше, они также могут обеспечивать преимущество для выполнения, например, отличной от традиционного КТ-формирования изображения и, в дополнение к КТ-формированию изображения, также могут обеспечивать режимы формирования изображения без какого-либо поворота, а только с линейным перемещением узла формирования рентгеновского изображения.
Таким образом, согласно одному аспекту данное устройство содержит направляющую конструкцию 50 как для источника 14 рентгеновского излучения, так и для детектора 15 изображения, а система управления для данного устройства включает режим работы для приведения в действие моторизованной конструкции 53 направляющей конструкции 50 для перемещения источника 14 и детектора 15, начиная с их основных положений, на расстояние в одном и том же направлении в пределах указанных диапазонов бокового перемещения источника 14 и детектора 15, и выполнения воздействия для формирования изображения при повороте узла 14, 15 формирования рентгеновского изображения вокруг оси.
Согласно одному аспекту данное устройство содержит направляющую конструкцию 50 как для источника 14 рентгеновского излучения, так и для детектора 15 изображения, причем система управления включает режим работы для приведения в действие направляющей конструкции 50 для перемещения источника 14 и детектора 15 в положение, отличное от их основного положения, в пределах указанных диапазонов бокового перемещения источника 14 и детектора 15 и выполнения воздействия для формирования изображения.
Согласно одному аспекту данное устройство содержит направляющую конструкцию 50 как для источника 14 рентгеновского излучения, так и для детектора 15 изображения, а система управления включает режим работы для приведения в действие направляющих конструкций 50 для перемещения источника 14 и детектора 15 в положения, находящиеся на одинаковом расстоянии в одном и том же направлении от их основного положения, в пределах указанных диапазонов бокового перемещения источника 14 и детектора 15 и выполнения воздействия для формирования изображения.
Согласно одному аспекту режим работы данного устройства включает выполняемое до воздействия для формирования изображения перемещение как источника 14 рентгеновского излучения, так и детектора 15 изображения для их размещения на крайних концах в одном и том же направлении от их основных положений в пределах указанных диапазонов бокового перемещения источника 14 и детектора 15.
Согласно одному аспекту данное устройство содержит направляющую конструкцию 50 как для источника 14 рентгеновского излучения, так и для детектора 15 изображения, причем система управления включает режим работы для приведения в действие направляющих конструкций 50 для перемещения источника 14 и детектора 15 в пределах указанных диапазонов бокового перемещения источника 14 и детектора 15 во время воздействия для формирования изображения.
Воздействие для формирования изображения в режимах работы, указанных выше, может включать управление посредством системы управления для приведения в действие первого приводного механизма 16, установленного с возможностью перемещения узла 14, 15 формирования рентгеновского изображения вокруг оси 13 поворота.
Согласно одному аспекту система управления включает по меньшей мере два режима формирования изображения данного устройства для управления первым приводным механизмом 16 для поворота узла формирования рентгеновского изображения вокруг оси и одновременного управления узлом 14, 15 формирования рентгеновского изображения для формирования изображения объекта, из которых в указанном первом режиме формирования изображения источник 14 рентгеновского излучения и детектор 15 изображения размещены в своих основных положениях в пределах диапазонов бокового перемещения источника 14 и детектора 15, а в указанном втором режиме формирования изображения источник 14 и детектор 15 перемещены вдоль направляющей конструкции 50 в пределах диапазонов бокового перемещения источника 14 и детектора 15 с расположением на одинаковом расстоянии в одном и том же направлении от их основных положений.
Согласно одному аспекту устройство содержит направляющую конструкцию 50 как для источника 14 рентгеновского излучения, так и для детектора 15 изображения, а система управления включает режим работы, включающий первое и второе воздействия для формирования изображения, причем указанное первое воздействие включает управление посредством системы управления для приведения в действие первого приводного механизма 16, установленного с возможностью перемещения узла 14, 15 формирования рентгеновского изображения вокруг оси 13 поворота в первом направлении поворота, пока источник 14 и детектор 15 не перемещены в положение на указанных первых крайних концах или вблизи них в одном и том же направлении от их основного положения в пределах указанных диапазонов бокового перемещения источника 14 и детектора 15, а указанное второе воздействие включает управление посредством системы управления для приведения в действие первого приводного механизма 16, установленного с возможностью перемещения узла 14, 15 вокруг оси 13 поворота в направлении поворота, противоположном указанному первому направлению, после того как источник 14 и детектор 15 были перемещены в положение на указанных вторых крайних концах или вблизи них в одном и том же направлении от центрального положения в пределах указанных диапазонов бокового перемещения источника 14 и детектора 15.
Согласно одному аспекту система управления данного устройства включает режим формирования изображения, включающий два поворота для сканирования при формирования изображения, причем первое сканирование включает перемещение узла 14, 15 формирования рентгеновского изображения с помощью первого приводного механизма 16 в первом направлении поворота, когда источник 14 рентгеновского излучения и детектор 15 изображения перемещены, до выполнения воздействия, в одном и том же направлении для расположения на расстоянии от их основных положений в направлении указанных первых крайних концов в пределах диапазонов бокового перемещения источника 14 и детектора 15, при этом второе сканирование включает перемещение узла 14, 15 формирования рентгеновского изображения с помощью первого приводного механизма 16 во втором направлении поворота, противоположном указанному первому направлению, когда как источник 14 и детектор 15 перемещены, до выполнения воздействия, на одинаковое расстояние для расположения на расстоянии от указанных основных положений в направлении указанных вторых крайних концов в пределах диапазонов бокового перемещения источника 14 и детектора 15.
Согласно одному аспекту режимы работы, описанные выше, дополнительно включают поворот в указанных первом и втором направлениях на угол более 180 градусов, но менее 360 градусов.
На Фиг. 9 показана блок-схема примера компонентов системы управления, подходящей для использования в устройстве согласно изобретению. В различных вариантах выполнения не все указанные признаки обязательно присутствуют в системе управления данного устройства. Система управления согласно Фиг. 9 выполнена с возможностью управления, прежде всего, работой источника 14 рентгеновского излучения и детектора 15 изображения во время воздействия. Компоненты, обеспечивающие управление работой источника 14 рентгеновского излучения и детектора 15 изображения, могут содержать компоненты, физически расположенные на источнике 14 и/или детекторе 15 и/или в других местах данного устройства.
Система управления на Фиг. 9 также выполнена с возможностью управления различными приводными средствами устройства, например, средствами, обеспечивающими поворот узла 14, 15 формирования рентгеновского изображения, поддерживаемыми их опорной конструкцией 20, средствами, приводящими в действие указанную одну или более направляющих конструкций 50, а также средствами, обеспечивающими перемещение опорной конструкции 20 для средств 14, 15 формирования изображения. На Фиг. 9 также показана система управления, содержащая по меньшей мере один режим входа пациента, который включает управление по меньшей мере одним из вышеупомянутых приводных средств. Соответственно, система управления на Фиг. 9 включает указанный по меньшей мере один режим сканирования. Входные параметры для системы управления могут быть обеспечены с помощью пульта дистанционного управления.
Также на Фиг. 9 показан путь передачи сигнала к установочной конструкции 23, как описано выше, а в случае, если устройство содержит моторизованный блокирующий механизм 24 для соединения и разъединения первой и второй удлиненных рамных частей 11, 21, как описано выше, система управления может также обеспечивать управление приводными средствами блокирующего механизма 24.
В целом, система управления может быть выполнена с возможностью управления всеми вышеописанными операциями или любой их частью. Рассмотренные выше конструкции и функциональные возможности обеспечивают различные возможности для упрощения расположения и выполнения формирования изображения пациента.
Изобретение относится медицине. Медицинское устройство формирования изображения для компьютерной томографии, содержащее: первую проходящую продольно рамную часть, соединенную с ней опорную конструкцию, содержащую кольцеобразную гентри, источник рентгеновского излучения и детектор изображения, которые вместе образуют узел формирования рентгеновского изображения, установленный на опорной конструкции, первый приводной механизм и систему управления для управления указанным первым приводным механизмом и одновременного управления узлом формирования рентгеновского изображения, причем опорная конструкция содержит одну или две направляющие конструкции для бокового перемещения одного из источника рентгеновского излучения и детектора изображения или обоих указанных элементов относительно опорной конструкции. Техническим результатом является создание устройства для компьютерной томографии, обладающего признаками, относящимися к взаимному расположению устройства и пациента для оказания воздействия. 34 з.п. ф-лы, 9 ил.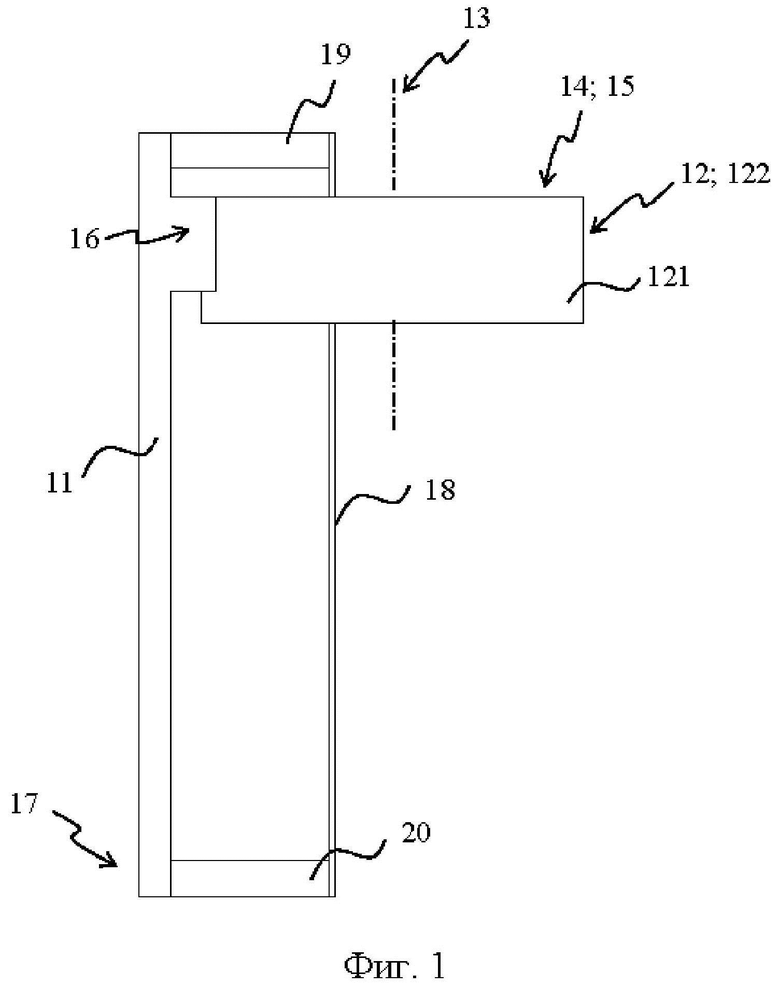
1. Медицинское устройство формирования изображения для компьютерной томографии, содержащее:
первую проходящую продольно рамную часть (11), проходящую в первом направлении и имеющую первый конец и второй конец,
опорную конструкцию (12), проходящую от проходящей продольно рамной части (11) во втором направлении под прямым углом к указанному первому направлению, причем опорная конструкция (12) содержит кольцеобразную гентри, соединенную с первой проходящей продольно рамной частью (11),
источник (14) рентгеновского излучения и детектор (15) изображения, которые вместе образуют узел (14, 15) формирования рентгеновского изображения, установленный на опорной конструкции (12),
первый приводной механизм (16), выполненный с возможностью перемещения узла (14, 15) формирования рентгеновского изображения вокруг виртуальной или физической оси (13) поворота, проходящей параллельно указанному первому направлению,
систему управления, выполненную с возможностью управления указанным первым приводным механизмом (16) и одновременного управления узлом (14, 15) формирования рентгеновского изображения,
отличающееся тем, что опорная конструкция (12) содержит одну или две направляющие конструкции (50), выполненные с обеспечением возможности бокового перемещения одного из источника (14) рентгеновского излучения и детектора (15) изображения или обоих указанных элементов, соответственно, относительно опорной конструкции (12) в плоскости, перпендикулярной направлению прохождения виртуальной или физической оси (13) поворота, причем диапазон указанного бокового перемещения включает основное положение и первое и второе крайние положения.
2. Устройство по п.1, отличающееся тем, что указанные одна или две направляющие конструкции (50) расположены на боковой поверхности гентри, при этом боковое перемещение источника (14) рентгеновского излучения и/или детектора (15) изображения относительно опорной конструкции (12) происходит на плоскости, проходящей под прямым углом к оси (13) поворота.
3. Устройство по п.1 или 2, отличающееся тем, что направляющая конструкция (50) содержит ходовую часть (51), установленную на источнике (14) рентгеновского излучения и/или детекторе (15) изображения и предназначенную для обеспечения возможности указанного бокового перемещения источника (14) рентгеновского излучения и/или детектора (15) изображения, причем диапазон указанного бокового перемещения ходовой части (51) включает основное положение и первое и второе крайние положения.
4. Устройство по п.3, отличающееся тем, что направляющая конструкция (50) содержит направляющую канавку или рельс (52) на стороне опорной конструкции (12) и сопрягаемую конструкцию (52') на стороне ходовой части (51).
5. Устройство по п.3 или 4, отличающееся тем, что направляющая конструкция (50) содержит моторизованную конструкцию (53), находящуюся в функциональном соединении с ходовой частью (51), причем моторизованная конструкция (53) обеспечивает указанное боковое перемещение одного из источника (14) рентгеновского излучения и детектора (15) изображения или их обоих в пределах указанного диапазона, включающего указанные первое и второе крайние положения одного из источника (14) рентгеновского излучения и детектора (15) изображения или их обоих, соответственно.
6. Устройство по п.5, отличающееся тем, что моторизованная конструкция (53) содержит ведущий винт (54), который проходит параллельно с указанной направляющей канавкой или рельсом (52) и находится в функциональном соединении с ходовой частью (51).
7. Устройство по любому из пп.1-6, отличающееся тем, что направляющая конструкция (50) содержит узел (55) датчика положения, выполненный с возможностью получения информации, касающейся положения источника (14) рентгеновского излучения и/или детектора (15) изображения в пределах указанного диапазона бокового перемещения.
8. Устройство по п.7, отличающееся тем, что узел (55) датчика положения выполнен с возможностью определения положения ходовой части (51) в пределах указанного диапазона бокового перемещения ходовой части (51).
9. Устройство по любому из пп.1-8, отличающееся тем, что между направляющей конструкцией (50) и системой управления обеспечен путь передачи сигнала.
10. Устройство по п.9, отличающееся тем, что путь передачи сигнала представляет собой путь передачи сигнала между узлом (55) датчика положения и системой управления.
11. Устройство по любому из пп.7-10, отличающееся тем, что узел (55) датчика положения является узлом (55) датчика абсолютного положения.
12. Устройство по п.11, отличающееся тем, что узел (55) датчика абсолютного положения содержит магнитный компонент (56), конструктивно соединенный с ходовой частью (51) и подвижно соединенный со стержнем (57), проходящим параллельно указанной по меньшей мере одной направляющей канавке или рельсу (52) и указанному ведущему винту (54) направляющей конструкции (50).
13. Устройство по любому из пп.1-12, отличающееся тем, что имеется установочный кронштейн (58), который прикреплен к ходовой части (51) и, с другой стороны, к источнику (14) рентгеновского излучения и/или детектору (15) изображения для обеспечения механического соединения источника (14) рентгеновского излучения и/или детектора (15) изображения с направляющей конструкцией (50).
14. Устройство по любому из пп.1-13, отличающееся тем, что в нем имеются две направляющие конструкции (50), включая первую конструкцию для источника (14) рентгеновского излучения и вторую конструкцию для детектора (15) изображения, причем указанные первая и вторая направляющие конструкции (50) могут содержать одинаковые компоненты и образовывать одинаково функционирующие узлы.
15. Устройство по любому из пп.1-14, отличающееся тем, что опорная конструкция (12) для узла (14, 15) формирования рентгеновского изображения содержит корпус (121), который вмещает по меньшей мере указанную поворотную гентри (122) и указанные одну или две направляющие конструкции (50).
16. Устройство по п.15, отличающееся тем, что корпус (121) имеет поверхность с по меньшей мере одним отверстием (59) для прикрепления с помощью установочного кронштейна (58) через указанное по меньшей мере одно отверстие (59) по меньшей мере одного из источника (14) рентгеновского излучения и детектора (15) изображения, причем указанное по меньшей мере одно отверстие (59) имеет такие размеры, чтобы обеспечить диапазон бокового перемещения источника (14) рентгеновского излучения и/или детектора (15) изображения, направляемого с помощью указанных одной или двух направляющих конструкций (50).
17. Устройство по любому из пп.1-16, отличающееся тем, что в соединении с источником (14) рентгеновского излучения расположен светоизлучающий компонент (141), причем опорная конструкция (12) содержит указанную направляющую конструкцию (50), выполненную с обеспечением возможности бокового перемещения источника (14) рентгеновского излучения относительно опорной конструкции (12), при этом светоизлучающий компонент (141) выполнен с возможностью проецирования светового луча такой же формы, что и рентгеновский луч, излучаемый источником рентгеновского излучения, причем рабочий диапазон направляющей конструкции (50) обеспечивает возможность расположения светового луча и рентгеновского луча в одном и том же местоположении относительно опорной конструкции (12).
18. Устройство по любому из пп.1-17, отличающееся тем, что оно содержит второй приводной механизм (17), выполненный с возможностью перемещения опорной конструкции (12) в направлении, параллельном указанному первому направлению, в котором проходит проходящая продольно рамная часть (11).
19. Устройство по любому из пп.4-18, отличающееся тем, что указанная первая проходящая продольно рамная часть (11) проходит горизонтально или выполнена с возможностью перемещения так, чтобы проходить горизонтально, а указанная моторизованная конструкция (53) направляющей конструкции (50) выполнена самоподдерживающейся относительно всех i) положений по меньшей мере одного из источника (14) рентгеновского излучения и детектора (15) изображения в пределах указанных диапазонов их боковых перемещений и ii) положений поворота, в которых посредством указанного первого приводного механизма (16) обеспечена возможность перемещения источника (14) рентгеновского излучения и детектора (15) изображения вокруг оси (13) поворота.
20. Устройство по любому из пп.1-19, отличающееся тем, что опорная конструкция (20) для узла (14, 15) формирования рентгеновского изображения содержит корпус (121) кольцеобразной гентри, причем указанные одна или две направляющие конструкции (50) расположены внутри, а источник (14) рентгеновского излучения и детектор (15) изображения расположены снаружи корпуса (121) кольцеобразной гентри.
21. Устройство по любому из пп.1-20, отличающееся тем, что система управления включает входные параметры для режима входа пациента, согласно которым обеспечено управление указанными одной или двумя направляющими конструкциями (50) с обеспечением приведения одного из источника (14) рентгеновского излучения и детектора (15) изображения или обоих указанных элементов, соответственно, в положение, более близкое к указанному первому крайнему положению, чем к указанному второму крайнему положению, в пределах указанного диапазона бокового перемещения источника (14) рентгеновского излучения и/или детектора (15) изображения.
22. Устройство по любому из пп.1-21, отличающееся тем, что оно содержит указанную направляющую конструкцию (50) и для источника (14) рентгеновского излучения, и для детектора (15) изображения, причем система управления указанного устройства включает входные параметры для режима входа пациента, согласно которым обеспечивается приведение в действие направляющих конструкций (50) для расположения источника (14) рентгеновского излучения и детектора (15) изображения ближе к указанному первому крайнему положению, чем к указанному второму крайнему положению, в пределах диапазонов бокового перемещения источника (14) рентгеновского излучения и детектора (15) изображения.
23. Устройство по любому из пп.1-22, отличающееся тем, что оно содержит механизм (50') линейного перемещения, выполненный с обеспечением возможности перемещения опорной конструкции (12) для узла (14, 15) формирования изображения относительно указанной первой проходящей продольно рамной части (11) в направлении, которое проходит под прямым углом к указанному первому направлению, в котором проходит указанная первая проходящая продольно рамная часть (11), и под прямым углом к указанному второму направлению, в котором опорная конструкция (12) для узла (14, 15) формирования рентгеновского изображения проходит от указанной первой проходящей продольно рамной части (11), причем диапазон указанного линейного перемещения опорной конструкции (12) включает основное положение относительно первой проходящей продольно рамной части (11) и первое и второе крайние положения.
24. Устройство по п.23, отличающееся тем, что система управления включает входные параметры для режима входа пациента, которые включают приведение в действие механизма (50') линейного перемещения с обеспечением расположения опорной конструкции (12) для узла (14, 15) формирования рентгеновского изображения ближе к указанному первому крайнему положению, чем к указанному второму крайнему положению, в пределах диапазона линейного перемещения опорной конструкции (12).
25. Устройство по п.24, отличающееся тем, что система управления включает входные параметры для режима входа пациента, согласно которым обеспечено управление указанными одной или двумя направляющими конструкциями (50) с обеспечением приведения одного из источника (14) рентгеновского излучения и детектора (15) изображения или обоих указанных элементов, соответственно, в положение, более близкое к указанному первому крайнему положению, чем к указанному второму крайнему положению, в пределах диапазона бокового перемещения источника (14) рентгеновского излучения и/или детектора (15) изображения, и механизмом (50') линейного перемещения с обеспечением приведения в действие опорной конструкции (12) для перемещения узла (14, 15) формирования рентгеновского изображения в положение, более близкое к тому из крайних положений в пределах диапазона линейного перемещения опорной конструкции (12) для узла (14, 15) формирования рентгеновского изображения, которое ближе к положению, в которое приведен источник (14) рентгеновского излучения и/или детектор (15) изображения, в пределах диапазона бокового перемещения источника (14) рентгеновского излучения и/или детектора (15) изображения.
26. Устройство по любому из пп.21-25, отличающееся тем, что режим входа пациента включает управление с помощью системы управления указанным первым приводным механизмом (16) для перемещения узла (14, 15) формирования рентгеновского изображения вокруг оси (13) поворота для приведения источника (14) рентгеновского излучения и детектора (15) изображения в поворотное положение, при котором указанные одна или две направляющие конструкции (50) расположены так, что направление перемещения, обеспеченное указанными одной или двумя направляющими конструкциями (50), находится под прямым углом к направлению, в котором проходит указанная первая проходящая продольно рамная часть (11).
27. Устройство по любому из пп.1-26, отличающееся тем, что оно содержит опору (18) для пациента, имеющую поверхность, которая проходит параллельно первой проходящей продольно рамной части (11).
28. Устройство по п.27, отличающееся тем, что опора (18) для пациента имеет такую же длину, что и первая проходящая продольно рамная часть (11).
29. Устройство по п.27 или 28, отличающееся тем, что оно содержит соединительную конструкцию (19, 20), которая обеспечивает механическое соединение опоры (18) для пациента с первой проходящей продольно рамной частью (11), и механизм (19', 20') регулирования опоры для пациента, предназначенный для обеспечения смещения опоры (18) для пациента ближе к первой проходящей продольно рамной части (11) и дальше от нее.
30. Устройство по любому из пп.1-29, отличающееся тем, что оно содержит указанную направляющую конструкцию (50) и для источника (14) рентгеновского излучения, и для детектора (15) изображения, причем система управления включает режим работы для приведения в действие направляющих конструкций (50) для перемещения источника (14) рентгеновского излучения и детектора (15) изображения в положения, которые находятся на одинаковом расстоянии в одном и том же направлении от основного положения в пределах указанных диапазонов бокового перемещения источника (14) рентгеновского излучения и детектора (15) изображения, и обеспечения воздействия для формирования изображения.
31. Устройство по любому из пп.1-30, отличающееся тем, что оно содержит указанную направляющую конструкцию (50) и для источника (14) рентгеновского излучения, и для детектора (15) изображения, причем система управления включает режим работы для приведения в действие направляющих конструкций (50) для перемещения источника (14) рентгеновского излучения и детектора (15) изображения в пределах указанных диапазонов бокового перемещения источника (14) рентгеновского излучения и детектора (15) изображения во время воздействия для формирования изображения.
32. Устройство по п.30 или 31, отличающееся тем, что воздействие для формирования изображения включает управление с помощью системы управления приведением в действие указанного первого приводного механизма (16), предназначенного для перемещения узла (14, 15) формирования рентгеновского изображения вокруг оси (13) поворота.
33. Устройство по любому из пп.30-32, отличающееся тем, что перед воздействием для формирования изображения обеспечено приведение в движение как источника (14) рентгеновского излучения, так и детектора (15) изображения для расположения на крайних концах в одном и том же направлении от их основных положений в пределах указанных диапазонов бокового перемещения источника (14) рентгеновского излучения и детектора (15) изображения.
34. Устройство по любому из пп.1-33, отличающееся тем, что оно содержит указанную направляющую конструкцию (50) и для источника (14) рентгеновского излучения, и для детектора (15) изображения, причем система управления включает режим работы, включающий первое и второе воздействия для формирования изображения, причем указанное первое воздействие для формирования изображения включает управление с помощью системы управления приведением в действие указанного первого приводного механизма (16), предназначенного для перемещения узла (14, 15) формирования рентгеновского изображения вокруг оси (13) поворота в первом направлении поворота, когда источник (14) рентгеновского излучения и детектор (15) изображения приведены в положение на указанных первых крайних концах в одном и том же направлении от их основного положения в пределах указанных диапазонов бокового перемещения источника (14) рентгеновского излучения и детектора (15) изображения, а указанное второе воздействие для формирования изображения включает управление с помощью системы управления приведением в действие указанного первого приводного механизма (16), предназначенного для перемещения узла (14, 15) формирования рентгеновского изображения вокруг оси (13) поворота в направлении поворота, противоположном указанному первому направлению поворота, после того, как источник (14) рентгеновского излучения и детектор (15) изображения были расположены на указанных вторых крайних концах в одном и том же направлении от их основного положения в пределах указанных диапазонов бокового перемещения источника (14) рентгеновского излучения и детектора (15) изображения.
35. Устройство по п.34, отличающееся тем, что указанный режим работы включает поворот в указанных первом и втором направлениях на угол более 180 градусов, но менее 360 градусов.
| US 2017215826 A1, 03.08.2017 | |||
| WO 2015112424 A1, 30.07.2015 | |||
| US 2014139215 A1, 22.05.2014 | |||
| US 10151810 B2, 11.12.2018 | |||
| СПОСОБ ПРОИЗВОДСТВА АРОМАТИЗИРОВАННОГО КОФЕЙНОГО НАПИТКА "ДНЕПРОВСКИЙ" | 2008 |
|
RU2384143C1 |

