Изобретение относится к области графической и электронной персонализации плоских носителей информации, в частности, персонализации ID карт и может быть использовано в иных процессах, предполагающих обработку, транспортировку, позиционирование плоских носителей информации. В частности, изобретение предназначено для персонализации ID карт с использованием графической (лазерной) обработки, а также с возможностью записи информации на встроенные в такие карты RFID чипы т.е. электронной персонализации.
Известен способ осуществления процесса персонализации плоского носителя информации, в котором транспортируют заготовку носителя информации из приемного устройства в устройство позиционирования, размещают заготовку носителя на рабочей поверхности устройства позиционирования, обеспечивают требуемое позиционирование заготовки носителя относительно обрабатывающего устройства, осуществляют при помощи обрабатывающего устройства персонализацию носителя на его противоположных сторонах за счет поворота устройства позиционирования и выгружают персонализированный носитель, (см. US 6652698 B1, опуб., 25.11.2003).
Недостатками известного способа являются повышенная сложность устройства для осуществления процесса персонализации из-за необходимости использования большого количества устройств позиционирования заготовки носителя на каждом операционном участке, ухудшение качества поверхности носителя, его целостности из-за необходимости его транспортировки вдоль всей технологической линии обработки носителя, низкая точность размещения на носителе информации из-за потери точности его позиционирования в процессе протяженной транспортировки при отсутствии на каждом операционном участке сложных и дорогостоящих устройств позиционирования.
Наиболее близким техническим решением к заявленному является способ осуществления процесса персонализации плоского носителя информации, заключающийся в том, что транспортируют заготовку носителя информации из приемного устройства в устройство позиционирования, размещают заготовку носителя на рабочей поверхности устройства позиционирования, обеспечивают требуемое позиционирование заготовки носителя относительно обрабатывающего устройства, осуществляют при помощи обрабатывающего устройства персонализацию носителя на его противоположных сторонах за счет поворота устройства позиционирования и выгружают персонализированный носитель (см. RU 2767026 С1, опуб., 16.03.2022).
Недостатками известного технического решения являются использование значительного количества отдельных модулей, каждый из которых снабжен собственным рабочим столом. Модули расположены в различных зонах обработки, предназначенных для проведения различных технологических операций с заготовкой носителя информации, что требует дополнительных механических манипуляторов для транспортировки обрабатываемой заготовки носителя из одного модуля в другой. Необходимость использования значительного количества рабочих столов и транспортировочных устройств требует дополнительного перемещения носителя с последующей его юстировкой на новом рабочем столе. При этом снижается точность проведения всего комплекса обработки носителя, увеличиваются габариты установки, ее сложность, материалоемкость. Кроме того, ухудшается качество поверхности носителя из-за дополнительных его перемещений со скольжением по различным рабочим поверхностям, а также снижается надежность работы устройства из-за повышенной вероятности перекоса и последующего заклинивания носителя при воздействии на него транспортировочных устройств.
Техническая проблема заключается в повышении производительности и качества процесса персонализации носителя, в осуществлении процесса персонализации плоских носителей с меньшими затратами материалов, меньшими затратами времени на производство и лучшим качеством работ, при меньшей площади, используемой для осуществления персонализации.
Техническим результатом является повышение точности позиционирования носителя и сокращения времени, затрачиваемого на процесс персонализации, за счет использования перемещающегося единственного рабочего стола, что позволяет исключить необходимость транспортировки носителя между операциями и его позиционирования на дополнительных рабочих столах и обеспечить таким образом большую точность позиционирования носителя. Кроме того, снижается материалоемкость и сложность оборудования, обеспечивающего процесс персонализации. Увеличивается надежность работы оборудования за счет уменьшения вероятности заклинивания носителя при его транспортировке от одного рабочего стола к другому. Снижается вероятность потери качества поверхностей носителя за счет значительного уменьшения пути его транспортировки по рабочим поверхностям оборудования.
Проблема решается и технический результат достигается тем, что при осуществлении процесса персонализации плоского носителя информации транспортируют заготовку носителя информации из приемного устройства в устройство позиционирования, размещают заготовку носителя на рабочей поверхности устройства позиционирования, обеспечивают требуемое позиционирование заготовки носителя относительно обрабатывающего устройства, осуществляют при помощи обрабатывающего устройства персонализацию носителя на его противоположных сторонах за счет поворота устройства позиционирования и выгружают персонализированный носитель, при этом, согласно изобретению, требуемое позиционирование заготовки носителя относительно обрабатывающего устройства обеспечивают путем перемещения устройства позиционирования вместе с заготовкой носителя.
Технический результат достигается также тем, что после размещения заготовки носителя на рабочей поверхности устройства позиционирования могут осуществлять доводку заготовки носителя, обеспечивая ее установку в требуемое положение на рабочей поверхности устройства позиционирования, путем перемещения устройства позиционирования вместе с заготовкой носителя относительно контактирующего с ней податливого упора.
Технический результат достигается также тем, что для осуществления переворота носителя на противоположную сторону, устройство позиционирования могут перемещать вместе с носителем в зону переворота, после чего устройством позиционирования могут транспортировать носитель в зону персонализации для персонализации его противоположной стороны.
Технический результат достигается также тем, что перед осуществлением персонализации заготовки носителя, могут обеспечивать требуемое угловое положение устройства позиционирования путем его доворота до касания контактной поверхности устройства с неподвижным позиционным упором, а перед персонализацией противоположной стороны носителя устройство позиционирования могут перемещать в сторону от зоны персонализации в зону переворота для осуществления переворота устройства позиционирования вместе с носителем, при этом для обеспечения требуемого углового положения устройства позиционирования в перевернутом положении, могут его доворачивать до касания другой контактной поверхности устройства с другим неподвижным позиционным упором.
Технический результат достигается также тем, что при помощи видеокамеры могут осуществлять инициализацию положения элементов, обеспечивающих процесс персонализации.
Технический результат достигается также тем, что могут осуществлять инициализацию положения устройства позиционирования и угловое положение его рабочей поверхности относительно обрабатывающего устройства для их приведения в требуемое положение.
Технический результат достигается также тем, что могут осуществлять инициализацию положения заготовки носителя, расположенной на рабочей поверхности, путем перемещения устройства позиционирования вместе заготовкой носителя в зону фотографирования видеокамеры и последующего поворота устройства вместе с заготовкой носителя в положение рабочей поверхности, перпендикулярное ее положению при проведении процесса персонализации, после чего визуально анализируют обращенную к ней торцевую поверхность заготовки носителя, а по результатам анализа юстируют положение устройства позиционирования и его рабочей поверхности в соответствии с системой координат обрабатывающего устройства.
Технический результат достигается также тем, что могут анализировать результат проведенного процесса персонализации при помощи видеокамеры, при этом для проведения визуального анализа персонализированный носитель могут транспортировать устройством персонализации в зону фотографирования, а для анализа противоположной стороны носителя могут переворачивать вместе с ним устройство позиционирования.
Технический результат достигается также тем, что выгрузку персонализированного носителя могут осуществлять путем его транспортировки устройством позиционирования к приемному устройству
Технический результат достигается также тем, что положение обрабатывающего устройства перед проведением процесса персонализации могут фиксировать.
Изобретение поясняется при помощи чертежей.
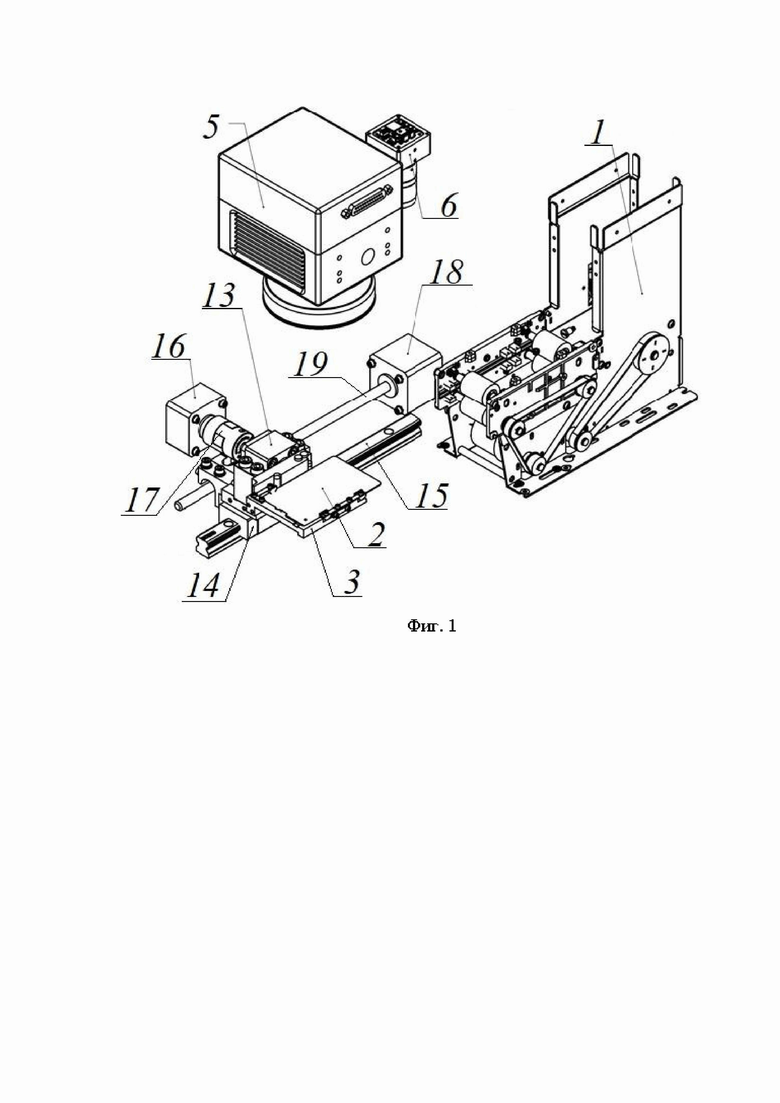
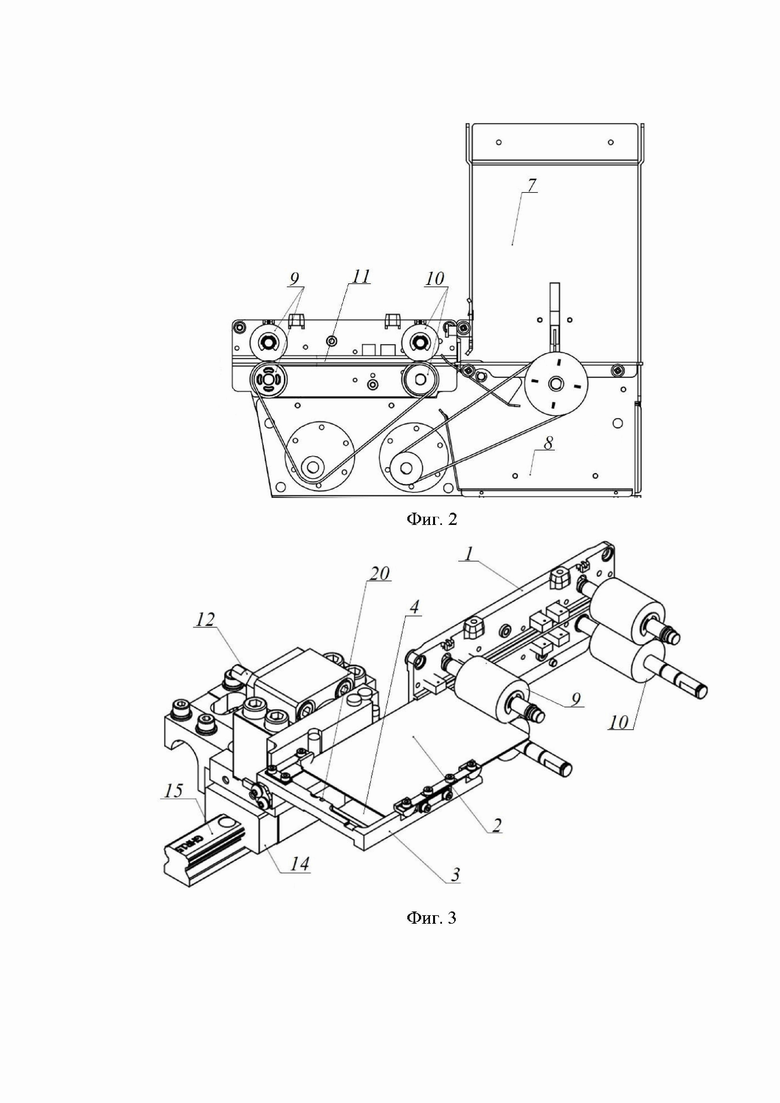
На фиг. 1 показана схема основных узлов комплекса для персонализации плоских носителей (ID-карт), с помощью которого осуществляют заявленный способ; На фиг. 2 показано приемное устройство 1 комплекса;
На фиг. 3 показан процесс передачи заготовки носителя 2 на рабочую поверхность 4 устройства позиционирования 3;
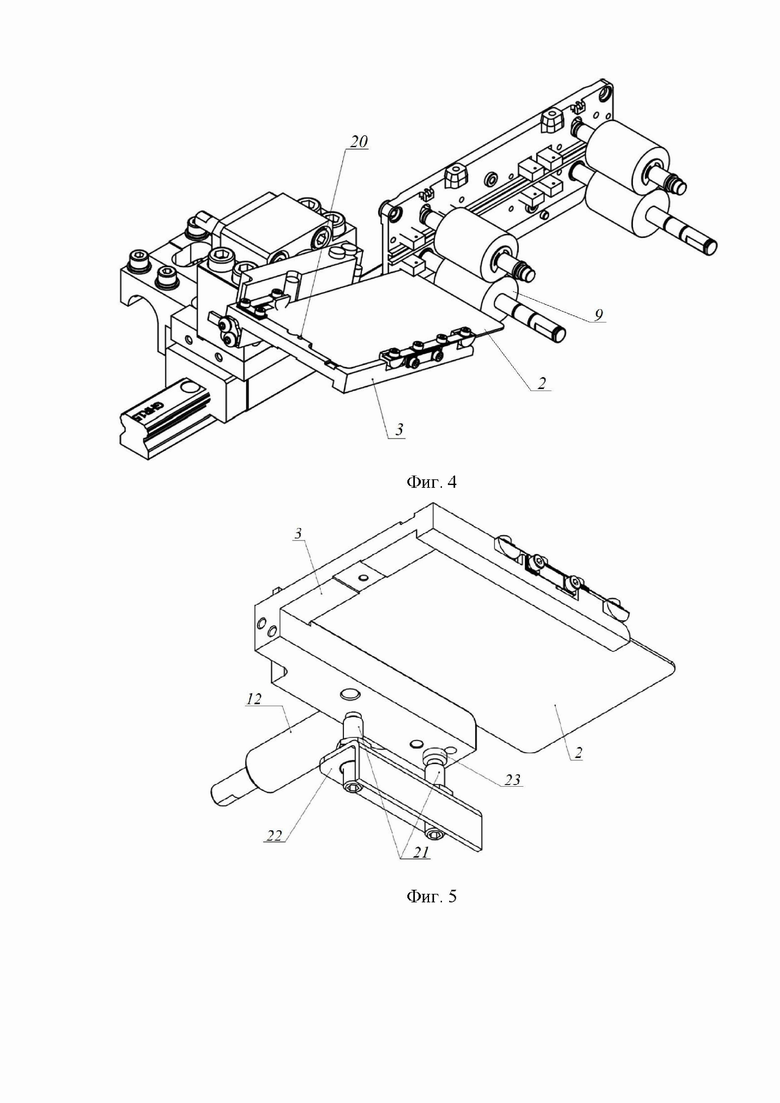
На фиг. 4 показан процесс доведения заготовки носителя 2 до требуемого положения в устройстве позиционирования 3;
На фиг. 5 показано расположение позиционных упоров 21 устройства позиционирования 3;
На Фиг. 6 показано взаимодействие устройства позиционирования с одним из позиционных упоров 21, перед персонализацией одной из сторон заготовки носителя 2;
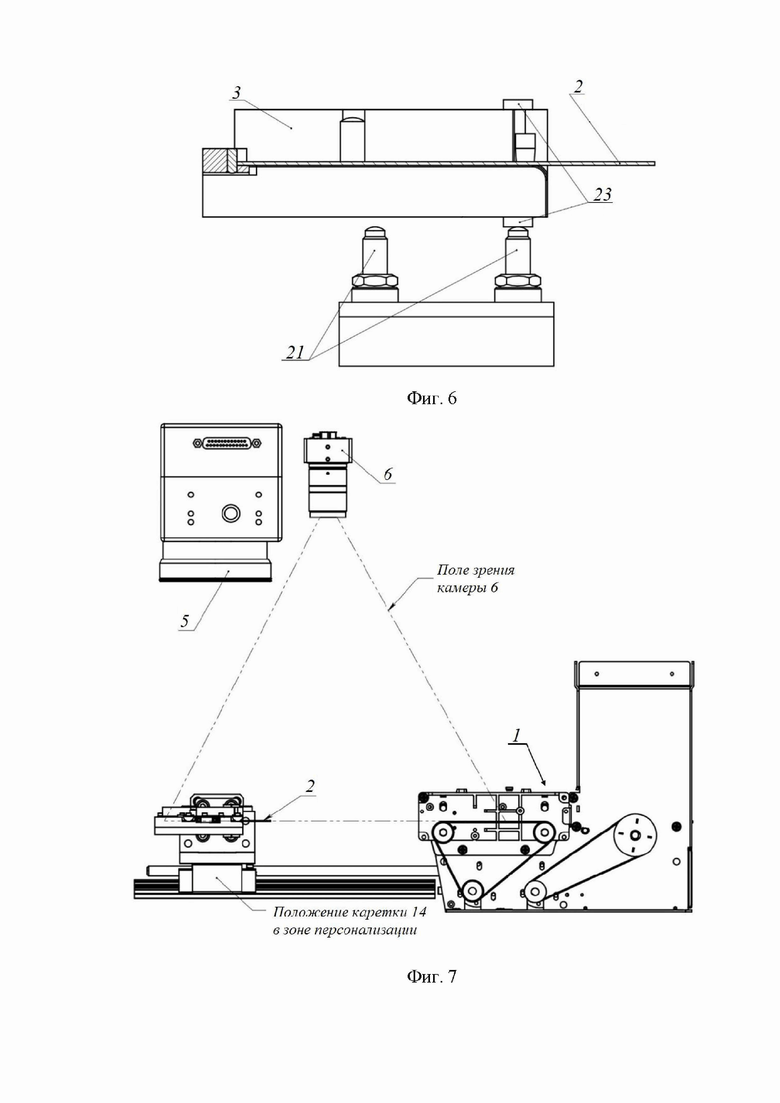
На фиг. 7 показан вид на комплекс персонализации в процессе инициализации его элементов видеокамерой 6;
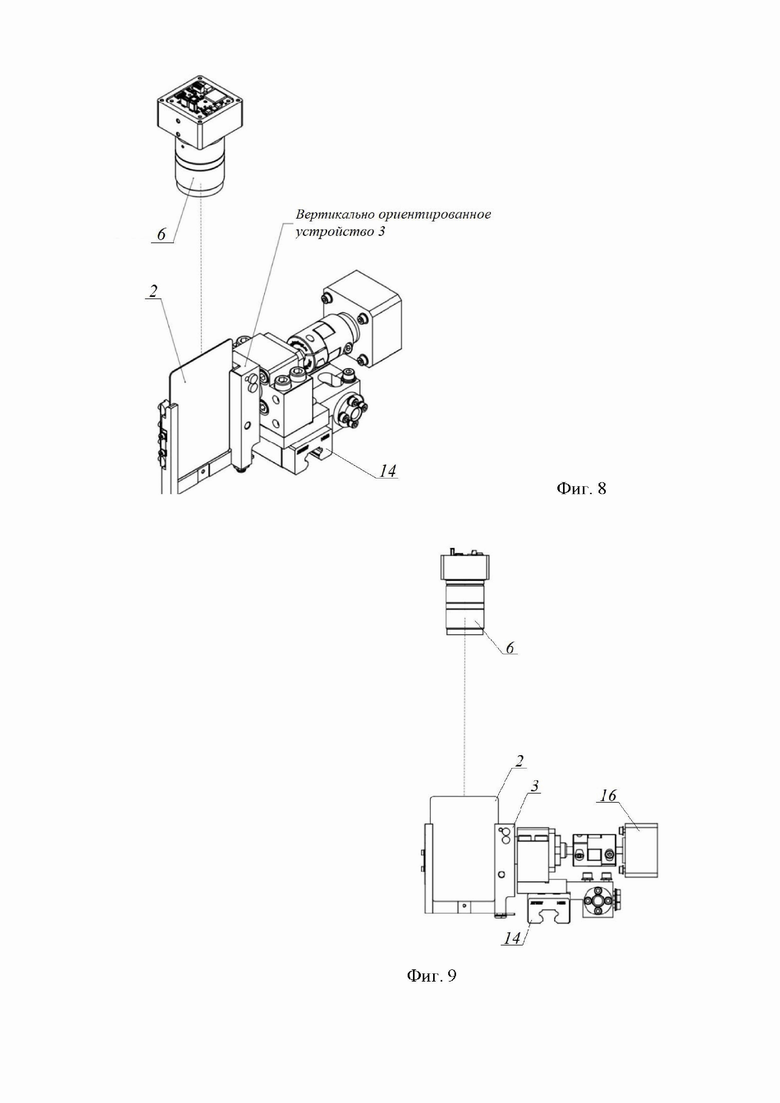
На фиг. 8 показан изометрический вид на устройство позиционирования 3 в процессе инициализации видеокамерой 6 положения заготовки носителя 2 перед началом процесса персонализации;
На фиг. 9 то же вид сбоку;
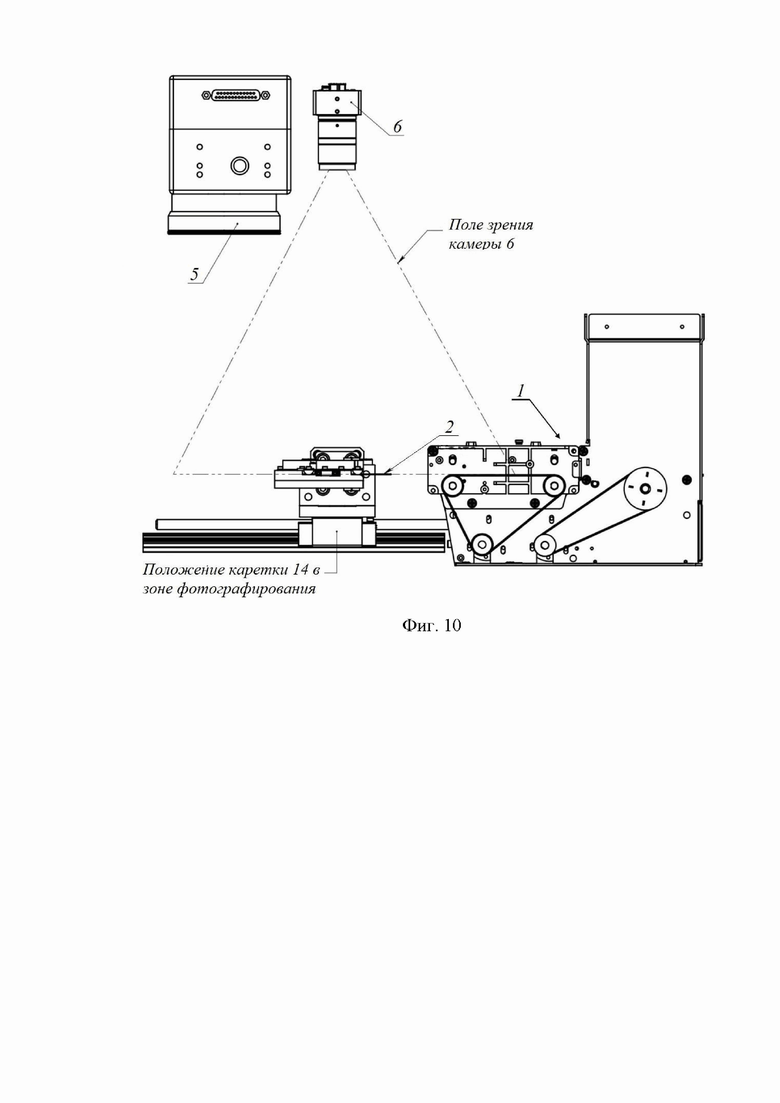
На фиг. 10 показано положение элементов комплекса в процессе анализа с помощью видеокамеры 6 результатов проведенного процесса персонализации.
Предложенный способ реализуется с помощью комплекса элементов, содержащего основание (на чертежах не показано), на котором установлены приемное устройство 1 (см. фиг. 1), для хранения/выдачи/приема плоских носителей 2 информации и их заготовок, например, ID карт.Комплекс элементов содержит также подвижное устройство позиционирования 3 носителя 2 информации, выполненное в виде рамки, имеющей рабочую поверхность 4, на которой располагается носитель 2, обрабатывающее устройство 5 (персонализатор), выполненное в виде лазерного сканатора, а также устройство инициализации элементов комплекса персонализации, выполненное в виде видеокамеры 6, установленной над элементами с возможностью идентификации формы и взаимного положения каждого элемента.
Приемное устройство 1 (см. фиг. 2) содержит лоток 7 для хранения заготовок носителей 2 и лоток 8 для приема и выдачи персонализированных носителей 2. Приемное устройство 1 содержит также две пары роликов, соответственно 9 и 10, предназначенные для перемещения носителей 2 как для их персонализации по направляющему пазу 11, так и для выдачи персонализированных носителей 2 непосредственно в руки.
Устройство позиционирования 3 (см. фиг. 3) закреплено на поворотном валу 12 с возможностью вращения на любой заданный угол как в одну, так и в другую стороны. Вал 12 установлен в подшипниковой опоре 13, расположенной на подвижной каретке 14, перемещающейся по линейной направляющей 15, закрепленной на основании комплекса. Вал 12 связан с поворотным приводом 16 с помощью муфты 17. Каретка 14 связана с линейным приводом 18 при помощи ходового винта 19.
Устройство позиционирования 3 (см. фиг. 4, 5 и 6) снабжено базирующим упором 20 носителя 2 и позиционными упорами 21, зафиксированными на кронштейне 22 относительно основания. Каждый упор 21 выполнен в виде стержня с контактной сферической торцевой поверхностью, взаимодействующей периодически с ответным плоским упором 23 устройства позиционирования 3.
Фиксация обрабатывающего устройства 5 позволяет обеспечить повышенную точность выполнения персонализации за счет минимизации количества подвижных элементов (устройство позиционирования 3).
Описываемый способ процесса персонализации осуществляется следующим образом.
С помощью видеокамеры 6 осуществляют инициализацию узлов и механизмов комплекса персонализации плоских носителей 2 (см. фиг. 7). На этапе включения оборудования или в начале цикла персонализации, т.е. когда носителя 2 в устройстве позиционирования 3 еще нет видеокамера 6 отслеживает устройство позиционирования 3, анализируя положение его края, габариты и т.д., тем самым определяя его позицию по линейной оси на направляющей 15 и ориентацию (угол) по поворотной оси вала 12. В зависимости от результата автоматического анализа фото с видеокамеры 6, программа автоматически выбирает нужный «алгоритм» перемещения устройства позиционирования 3 в нужную позицию для начала или продолжения работы.
Приемное устройство 1 транспортирует предварительно загруженную в его лоток 7 заготовку носителя 2 по направляющему пазу 11 парами роликов 10 и 9 в направлении устройства позиционирования 3 (см. фиг. 2).
Устройство позиционирования 3 перемещается в направлении подаваемой по пазу 11 заготовки носителя 2 и устанавливается в такое положение, при котором его рабочая поверхность 4 становится продолжением направляющего паза 11. Заготовка носителя 2 направляется крайней парой роликов 9 в устройство позиционирования 3 и размещается на его рабочей поверхности 4 (см. фиг. 3). Для предотвращения несогласованности закона перемещения роликов 9 и требуемого положения заготовки носителя 2 на рабочей поверхности 4 заготовку носителя 2 не доводят до крайней точки ее требуемого положения, определяемого, например, положением базирующего упора 20, расположенного на устройстве позиционирования 3. Для доведения заготовки носителя 2 до базирующего упора 20, определяющего ее требуемое положение на рабочей поверхности 4, устройство позиционирования 3 перемещают вместе с недоведенной до требуемого положения заготовкой носителя 2 в сторону податливого упора, в качестве которого могут использовать, например, внешнюю цилиндрическую поверхность одного из роликов 9 приемного устройства 1 (см. фиг. 4). Причем перед указанным перемещением устройства позиционирования 3 осуществляют его поворот вокруг оси вращения вала 12 для ориентации рабочей поверхности 4 и торца заготовки носителя 2, выступающего из устройства позиционирования 3, в направлении оси вращения ролика 9. Так как ролики 9 и 10 выполняют из податливого материала, то в процессе доведения заготовки носителя 2 до базирующего упора 20 не происходит повреждения заготовки носителя 2 или поломки привода устройства позиционирования 3. Таким образом, обеспечивают требуемое положение заготовки носителя 2 в устройстве позиционирования 3, необходимое для обеспечения требуемой точности проведения процесса персонализации. В качестве податливого упора может быть использован иной, отдельный элемент, неподвижный или выдвигаемый перед операцией доводки заготовки носителя 2.
На этапе, когда устройство позиционирования 3 получает заготовку носителя 2 из приемного устройства 1 производится еще одна инициализация, которая предшествует персонализации носителя 2. Здесь видеокамера 6 отслеживает не только положение устройства позиционирования 3, но и саму заготовку носителя 2, т.к. она в данном случае является приоритетным объектом. Устройство позиционирования 3 с заготовкой носителя 2 перемещается в позицию фотографирования, где поворачивается вокруг оси вращения вала 12 и становится вертикально-ориентированной, при этом консольный торец заготовки носителя 2 направлен вверх на видеокамеру 6 (см. фиг. 8 и 9). С высокой точностью (0,02 мм), определяется положение торца заготовки носителя 2, а именно его кромок и габаритов, что позволяет достаточно быстро, управляя подвижными осями (линейной, вал 12 и поворотной, каретка 14), выставить устройство позиционирования 3 с заготовкой носителя 2 в абсолютное положение, определенное на этапе разработки оборудования. Затем, для каждой оси перемещения элементов оборудования, в частности, устройства позиционирования 3, назначается относительный ноль, от которого осуществляется отсчет дальнейших перемещений в течение одного цикла персонализации.
Необходимо отметить, что поле зрения видеокамеры 6 наряду с программным обеспечением позволяет оценить положение всех подвижных узлов на любом этапе технологического цикла.
После указанных процедур по линейной направляющей 15 перемещают устройство позиционирования 3 вместе с установленной на ее рабочей плоскости 4 заготовкой носителя 2 в зону персонализации и устанавливают устройство позиционирования 3 в позицию обработки первой стороны заготовки носителя 2. При этом серьезной проблемой является обеспечение высокоточного позиционирования заготовки носителя 2 в зоне персонализации. И указанная высокая точность должна сохраняться на протяжении всего срока службы оборудования.
Для обеспечения высокой точности углового позиционирования и высокого значения ее повторяемости в зоне персонализации устройство позиционирования 3 поворачивается приводом 16 вокруг оси вращения вала 12 до ограничителя. Таким ограничителем является позиционный упор 21, на сферическую торцевую поверхность которого опирается плоский упор 23 устройства позиционирования 3 (см. фиг. 5 и 6). Точность позиционирования заготовки носителя 2 по линейным координатам обеспечивается точностью выставления устройства позиционирования 3 и точностью размещения заготовки носителя 2 на рабочей поверхности 4.
После проведения подготовительных операций позиционирования осуществляют непосредственно персонализацию носителя 2 на первой стороне. Персонализацию осуществляют путем нанесения информации обрабатывающим устройством 5 (например, лазерным сканатором) на поверхность заготовки носителя 2. Возможно проведение одновременно с лазерной персонализацией процесса электронной персонализации, путем осуществления записи информации на RFID чип непосредственно в момент обработки носителя 2 лазером.
Перед обработкой оборотной стороны носителя 2 устройство позиционирования 3 снимается с позиционного упора 21, перемещается в зону переворота (зону, свободную от выступающих элементов, мешающих повороту), после чего возвращается в зону обработки перевернутой на 180° и позиционируется уже на другой позиционный упор 21, не задействованный при обработке первой стороны носителя 2. Описанное поочередное взаимодействие устройства позиционирования 3 с позиционными упорами 21 обеспечивает точное и повторяемое позиционирование заготовки носителя 2 вокруг оси поворотного вала 12 для ее персонализации путем лазерной обработки. Причем взаимодействие пары контактирующих поверхностей «сфера-плоскость» (см. фиг. 5 и 6) существенно повышает точность позиционирования до уровня 0,002 мм.
После обработки обеих сторон носителя 2 устройство позиционирования 3 вместе с носителем 2 снова перемещается в зону фотографирования в поле зрения видеокамеры 6 для проведения высокоточного анализа результатов персонализации для визуального выявления ошибок и определения качества выполненной обработки. Вращение устройства позиционирования 3 в этой зоне на произвольный угол позволяет произвести такой анализ для обеих сторон носителя 2.
Выгрузку персонализированного носителя 2 осуществляют перемещением устройства позиционирования 3 с персонализированным носителем 2 в сторону приемного устройства 1 и транспортировкой его с помощью роликов 9 и 10 в лоток 8.
Таким образом, носитель 2 и его заготовку транспортируют, в частности, в зону обработки перед персонализацией, при помощи устройства позиционирования 3, на рабочей поверхности 4 которого заготовка носителя 2 устанавливается в неизменное в течение всего процесса персонализации положение. При этом заготовка носителя 2 перемещается устройством позиционирования 3 также в иные зоны описываемого комплекса устройств для обеспечения всех требуемых технологических операций процесса персонализации.
Использование перемещающегося устройства позиционирования 3 с неизменным положением на его рабочей поверхности 4 заготовки носителя 2 повышает производительность и качество процесса персонализации носителя 2. То есть, исключение необходимости транспортировки носителя 2 между операциями, а также его позиционирования на дополнительных рабочих столах обеспечивает большую точность позиционирования носителя 2, особенно, при выполнении многостадийного процесса обработки. Кроме того, снижается материалоемкость и сложность оборудования, обеспечивающего процесс персонализации, за счет минимизации количества используемых элементов конструкции и размера основания, на котором оно установлено. Увеличивается надежность работы оборудования за счет уменьшения вероятности заклинивания носителя 2 из-за исключения операций по его перемещению относительно рабочей поверхности 4 в процессе обработки. По этой же причине снижается и вероятность потери качества внешних поверхностей носителя 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧИЙ СТОЛ УСТРОЙСТВА ЛАЗЕРНОЙ ПЕРСОНАЛИЗАЦИИ ПЛОСКИХ НОСИТЕЛЕЙ ИНФОРМАЦИИ | 2023 |
|
RU2820755C1 |
| УСТРОЙСТВО ДВУХСТОРОННЕЙ ПЕРСОНАЛИЗАЦИИ ПЛОСКИХ НОСИТЕЛЕЙ ИНФОРМАЦИИ | 2023 |
|
RU2823653C1 |
| МОДУЛЬ ПОВОРОТА КАРТЫ ДЛЯ ПЕРСОНАЛИЗАЦИИ | 2021 |
|
RU2759089C1 |
| БЛОК ПЕРЕМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ КАРТЫ ПРИ ЛАЗЕРНОЙ И/ИЛИ ЭЛЕКТРОННОЙ ПЕРСОНАЛИЗАЦИИ | 2022 |
|
RU2767026C1 |
| ТОЛКАТЕЛЬ КАРТЫ УСТРОЙСТВА ДЛЯ ЛАЗЕРНОЙ И/ИЛИ ЭЛЕКТРОННОЙ ПЕРСОНАЛИЗАЦИИ | 2021 |
|
RU2763118C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КАРТЫ УСТРОЙСТВА ДЛЯ ЛАЗЕРНОЙ И/ИЛИ ЭЛЕКТРОННОЙ ПЕРСОНАЛИЗАЦИИ | 2021 |
|
RU2763119C1 |
| Мобильная платформа для создания персонализированного фильма или серии изображений | 2015 |
|
RU2761316C2 |
| СИСТЕМА, СПОСОБ И ИНТЕРФЕЙС ДЛЯ ОБЕСПЕЧЕНИЯ ПЕРСОНАЛИЗИРОВАННОГО ПОИСКА И ДОСТУПА К ИНФОРМАЦИИ | 2005 |
|
RU2419858C2 |
| РАСПРЕДЕЛЁННОЕ ОБУЧЕНИЕ МОДЕЛЕЙ МАШИННОГО ОБУЧЕНИЯ ДЛЯ ПЕРСОНАЛИЗАЦИИ | 2018 |
|
RU2702980C1 |
| Устройство для ручного выравнивания кремниевых пластин перед их временным сращиванием | 2020 |
|
RU2745297C1 |
Изобретение относится к области электронной и графической персонализации плоских носителей информации, в частности к способу осуществления процесса персонализации плоского носителя информации. Технический результат заключается в повышении точности позиционирования носителя на рабочем столе. В способе транспортируют заготовку носителя информации из приемного устройства в устройство позиционирования, размещают заготовку носителя на рабочей поверхности устройства позиционирования, обеспечивают требуемое позиционирование заготовки носителя относительно обрабатывающего устройства, осуществляют при помощи обрабатывающего устройства персонализацию носителя на его противоположных сторонах за счет поворота устройства позиционирования и выгружают персонализированный носитель, при этом после размещения заготовки носителя на рабочей поверхности устройства позиционирования осуществляют доводку заготовки носителя, обеспечивая ее установку в требуемое положение на рабочей поверхности устройства позиционирования путем перемещения устройства позиционирования вместе с заготовкой носителя. 8 з.п. ф-лы, 10 ил.
1. Способ осуществления процесса персонализации плоского носителя информации, заключающийся в том, что транспортируют заготовку носителя информации из приемного устройства в устройство позиционирования, размещают заготовку носителя на рабочей поверхности устройства позиционирования, обеспечивают требуемое позиционирование заготовки носителя относительно обрабатывающего устройства, осуществляют при помощи обрабатывающего устройства персонализацию носителя на его противоположных сторонах за счет поворота устройства позиционирования и выгружают персонализированный носитель, отличающийся тем, что после размещения заготовки носителя на рабочей поверхности устройства позиционирования осуществляют доводку заготовки носителя, обеспечивая ее установку в требуемое положение на рабочей поверхности устройства позиционирования путем перемещения устройства позиционирования вместе с заготовкой носителя.
2. Способ по п. 1, отличающийся тем, что для осуществления переворота носителя на противоположную сторону устройство позиционирования перемещают вместе с носителем в зону переворота, после чего устройством позиционирования транспортируют носитель в зону персонализации для персонализации его противоположной стороны.
3. Способ по п. 2, отличающийся тем, что перед осуществлением персонализации заготовки носителя обеспечивают требуемое угловое положение устройства позиционирования путем его доворота до касания контактной поверхности устройства с неподвижным позиционным упором, а перед персонализацией противоположной стороны носителя устройство позиционирования перемещают в сторону от зоны персонализации в зону переворота для осуществления переворота устройства позиционирования вместе с носителем, при этом для обеспечения требуемого углового положения устройства позиционирования в перевернутом положении его доворачивают до касания другой контактной поверхности устройства с другим неподвижным позиционным упором.
4. Способ по п. 1, отличающийся тем, что при помощи видеокамеры осуществляют инициализацию положения элементов, обеспечивающих процесс персонализации.
5. Способ по п. 4, отличающийся тем, что осуществляют инициализацию положения устройства позиционирования и угловое положение его рабочей поверхности относительно обрабатывающего устройства для их приведения в требуемое положение.
6. Способ по п. 5, отличающийся тем, что осуществляют инициализацию положения заготовки носителя, расположенной на рабочей поверхности, путем перемещения устройства позиционирования вместе с заготовкой носителя в зону фотографирования видеокамеры и последующего поворота устройства вместе с заготовкой носителя в положение рабочей поверхности, перпендикулярное ее положению при проведении процесса персонализации, после чего визуально анализируют обращенную к ней торцевую поверхность заготовки носителя, а по результатам анализа юстируют положение устройства позиционирования и его рабочей поверхности в соответствии с системой координат обрабатывающего устройства.
7. Способ по п. 1, отличающийся тем, что анализируют результат проведенного процесса персонализации при помощи видеокамеры, при этом для проведения визуального анализа персонализированный носитель транспортируют устройством персонализации в зону фотографирования, а для анализа противоположной стороны носителя переворачивают вместе с ним устройство позиционирования.
8. Способ по п. 1, отличающийся тем, что выгрузку персонализированного носителя осуществляют путем перемещения устройства позиционирования с персонализированным носителем к приемному устройству и транспортировки персонализированного носителя устройством позиционирования в приемное устройство.
9. Способ по п. 1, отличающийся тем, что положение обрабатывающего устройства перед проведением процесса персонализации фиксируют.
| US 20220212481 A1, 07.07.2022 | |||
| US 20120132720 A1, 31.05.2012 | |||
| БЛОК ПЕРЕМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ КАРТЫ ПРИ ЛАЗЕРНОЙ И/ИЛИ ЭЛЕКТРОННОЙ ПЕРСОНАЛИЗАЦИИ | 2022 |
|
RU2767026C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КАРТЫ УСТРОЙСТВА ДЛЯ ЛАЗЕРНОЙ И/ИЛИ ЭЛЕКТРОННОЙ ПЕРСОНАЛИЗАЦИИ | 2021 |
|
RU2763119C1 |
| ТОЛКАТЕЛЬ КАРТЫ УСТРОЙСТВА ДЛЯ ЛАЗЕРНОЙ И/ИЛИ ЭЛЕКТРОННОЙ ПЕРСОНАЛИЗАЦИИ | 2021 |
|
RU2763118C1 |
| МОДУЛЬ ПОВОРОТА КАРТЫ ДЛЯ ПЕРСОНАЛИЗАЦИИ | 2021 |
|
RU2759089C1 |
| WO 1997033245 A1, 12.09.1997 | |||
| Установка вакуумной сублимационной сушки | 2024 |
|
RU2831147C1 |
| EP 1991430 A1, 19.11.2008 | |||
| US 20180326763 A1, 15.11.2018 | |||
| US 20090308929 A1, 17.12.2009 | |||
| US 20130220984 A1, 29.08.2013 | |||

