Область техники
[0001] Настоящее изобретение относится к области обеспечения взрывных работ в скважинах, а именно к измерительному оборудованию и способам измерения глубины скважины и определения наличия жидкости в скважинах.
Уровень техники
[0002] Взрывные работы в скважинах - это ключевой этап в добыче полезных ископаемых. Они играют важную роль в процессе извлечения ресурсов из земли и позволяют добиться нескольких критически важных целей. Прежде всего, взрывные работы предназначены для эффективного разрушения твердых пород, которые окружают скважину. Это необходимо для обеспечения доступа к полезным ископаемым, залегающим внутри земли. Так, в нефтегазовой промышленности взрывы применяются для разрыва пластов и открывания доступа к скопившимся запасам сырья. Кроме того, взрывные работы имеют свое применение в повышении проницаемости геологического пласта. Путем контролируемых взрывов можно улучшить способность породы пропускать флюиды, что существенно увеличивает эффективность и производительность скважины. Это особенно важно в сфере нефтедобычи, где повышенная проницаемость позволяет увеличить объем добычи. В некоторых случаях взрывные работы также применяются для геологических исследований. Они могут помочь в получении данных о составе геологических формаций, их структуре и свойствах. Это важно для оценки потенциальных месторождений и разработки оптимальных стратегий добычи.
[0003] Измерение глубины скважины и определение наличия жидкости в ней представляют собой неотъемлемую часть предварительной подготовки к взрывным работам и влияют на безопасность и эффективность всей операции. Знание точной глубины скважины является необходимым условием для правильного проведения взрывных работ. Это позволяет инженерам и специалистам точно определить параметры взрыва, в том числе выбор типа взрывчатых веществ, их распределение внутри скважины и глубину внедрения. Неправильное определение глубины может привести к нежелательным последствиям, таким как неполное разрушение породы или даже повреждение самой скважины. Важность определения наличия жидкости в скважине также трудно переоценить. Это связано с несколькими аспектами. Во-первых, наличие жидкости может оказать влияние на поведение взрыва. Например, если скважина содержит воду, это может замедлить распространение ударной волны и изменить характер разрушения породы. Кроме того, определение наличия жидкости важно с точки зрения безопасности. Например, при взрыве в ненадлежащих условиях с наличием взрывопожароопасных газов или жидкостей, это может привести к серьезным авариям.
[0004] Измерение глубины скважины и определение наличия жидкости в ней осуществляются с помощью специальных технологий и оборудования. Один из наиболее распространенных способов - это использование кабельных высотомеров или глубиномеров. Эти приборы спускаются в скважину с помощью кабеля и оснащены датчиками, регистрирующими расстояние до дна. При достижении дна скважины, считывается показание, что и дает точную глубину. Для определения наличия жидкости в скважине используется геофизическое исследование, называемое геоакустическим зондированием. Этот метод основан на измерении времени, требуемого для прохождения звуковых волн через жидкость и твердые породы. Если в скважине присутствует жидкость, то скорость распространения звука будет существенно выше, чем если бы в ней была только твердая порода. Также могут использоваться другие методы, такие как эхолокация, гравиметрия и магнитометрия, но они менее распространены в данном контексте. Важно отметить, что точность измерений и надежность результатов зависят от квалификации и опыта специалистов, проводящих эти исследования, а также от качества используемого оборудования.
[0005] Известен прибор для измерения глубины скважины, охраняемый патентом на полезную модель № CN 218724510 U (опубл. 24.03.2023 г.; МПК: В65Н 75/40; В65Н 75/44; G01F 23/04; G01F 23/296; G01F 23/80). Полезная модель представляет собой прибор для измерения глубины скважины, объединяющий измерение глубины скважины и измерение уровня воды, который содержит опору основания, имеющую U-образную опорную конструкцию корпуса, одна сторона опоры основания соединена с возможностью поворота с поворотным столом. Внутренняя часть опоры основания соединена с возможностью вращения с валиком. Один конец валика снабжен ручкой, внутренняя часть одной стороны ручки соединена болтом на защелку, а другая сторона ручки снабжена датчиком уровня воды. Контроллер детектора глубины скважины установлен на одной стороне дисковой конструкции опоры основания, а контроллер детектора глубины скважины проникает внутрь опоры основания и снабжен отверстием для стыкового соединения.
[0006] Первым недостатком аналога является то, что для определения уровня воды и глубины скважины используют два разных троса. Это является крайне затратным, т.к. требует оснастить прибор двумя кабелями. Более того, это повышает нагрузку на двигатель, связанную с повышением веса погружаемого троса. Помимо этого, спуск и подъем троса осуществляются вручную, что является трудоемким и замедляет процесс измерения.
[0007] Еще одним известным аналогом является техническое решение, раскрытое в заявке № WO 2020243797 A1 (опубл. 10.12.2020 г.; МПК: Е21В 47/04; Е21В 47/06; G01B 7/04; G01B 7/26). Заявленная система для скважинных измерений содержит кабель, содержащий разнесенные по длине кабеля закладные элементы; датчик для обнаружения элементов, когда они перемещаются относительно датчика; и процессор для определения расстояния, пройденного кабелем, на основе обнаружения элементов, прошедших мимо датчика. Также в заявке раскрыть способ для скважинных измерений, который включает обнаружение элементов, движущихся мимо датчика; и определение расстояния, пройденного кабелем, на основе обнаружения элементов, которые прошли мимо датчика.
[0008] Недостаток описанного решения заключается в том, что для измерения глубины скважины гибкий кабель должен быть заранее выполнен с закладными элементами, а в скважину должна быть заранее установлена сенсорная система (или на ином пути кабеля). Это является крайне ресурсозатратным. Помимо этого, измерение глубины по меткам на тросе является крайне непрактичным, т.к. трос подвергается растяжению, температурному расширению, проскальзыванию при двойном наматывании и т.д. Такое больше количество переменных сложно учесть, т.к. зависимость от этих параметров не является линейной. В связи с этим, точность измерений с помощью меток снижается. Также ввиду того, что расчет глубины осуществляется посредством подсчета меток на кабеле, данный способ не является точным. Он может определять глубину только в пределах погрешности расстояния между двумя соседними метками. То есть, необходимо или ставить метки с очень большой частотой, которая может перестать быть различимой для датчиков, детектирующих метки, или будет снижаться точность измерения.
[0009] Также известно устройство для измерения глубины спуска кабеля в скважину, раскрытое в патенте № RU 2622468 C1 (опубл. 15.06.2017 г.; МПК: G01B 7/04; Е21В 47/04; G01B 7/26). Устройство содержит корпус, катушку, закрепленную в корпусе, с возможностью вращения в нем, содержащую намотанный на нее кабель с заранее известными параметрами, шкив, закрепленный в корпусе, через который кабель, разматываемый с катушки, спускается в скважину; метку, закрепленную на шкиве, блок обнаружения метки, выполненный с возможностью обнаружения метки и передачи сигнала обнаружения на блок измерения, блок измерения, выполненный с возможностью принимать сигнал обнаружения от блока обнаружения метки, вычислять глубину спуска кабеля как произведение количества принятых сигналов обнаружения на длину окружности шкива. Причем блок измерения на основании заранее известных параметров кабеля дополнительно вводит корректирующую функцию FP для измеряемого значения длины кабеля, учитывающую нелинейное растяжение кабеля по мере его спуска в скважину; причем блок обнаружения метки и блок измерения закреплены в корпусе и функционально связаны друг с другом посредством линий связи.
[0010] Первый недостаток устройства в том, что устройство (зондирующее) является крайне габаритным и ресурсоемким, что оказывает повышенную нагрузку на двигатель. Помимо этого, аналогично предыдущему описанному решению, измерение глубины описанным устройством осуществляют по меткам на тросе. В связи с этим, точность измерений с помощью этого устройства снижается.
[0011] Также известно устройство измерения глубины по заявке № WO 2018102864 A1 (опубл. 14.06.2018 г.; МПК: В21С 47/20; Е21В 47/04; G01B 11/02; G01B 5/02; G01B 5/18; G01F 23/00). Устройство измерения глубины содержит катушку, содержащую отрезок шнура с бобышкой, прикрепленной к свободному концу шнура, удаленному от катушки. Бобышка представляет собой твердое тело предпочтительно в форме сферы, сфероида или эллипсоида. Устройство имеет измерительное устройство, предназначенное для измерения длины шнура, высвобождаемого из катушки во время использования, что указывает на глубину отверстия. Измерительное устройство также выполнено с возможностью измерения скорости ускорения, при которой шнур сбрасывается с катушки, при этом изменение скорости ускорения указывает на то, что шарик попал в жидкость или суспензию.
[0012] Первым недостатком данного устройства является то, что в том случае, если количество жидкости в скважине слишком мало, не предусмотрено достоверного способа автоматического измерения точного уровня воды и наличия воды в скважине в принципе. Однако, для дальнейшего проведения взрывных работ крайне важным является определение наличия жидкости в скважине, а также точной высоты водяного столба. Сущность изобретения
[0013] Задачей настоящего изобретения является создание и разработка измерительного устройства для измерения глубины скважины и обнаружения наличия в ней жидкости при обеспечении взрывных работ и способа измерения глубины скважины и обнаружения наличия в ней жидкости при обеспечении взрывных работ, обеспечивающих возможность автоматического измерения глубины скважины и детектирования наличия жидкости в скважине с повышенной точностью и скоростью измерения.
[0014] Данная задача решается заявленным изобретением за счет достижения такого технического результата, как обеспечение возможности измерения глубины скважины и детектирования наличия жидкости в скважине с повышенной точностью и скоростью измерения. Заявленный технический результат достигается в том числе, но не ограничиваясь, благодаря
• применению датчика жидкости, в электрической цепи которого по крайней мере один контакт выполнен разомкнутым;
• возможности определения глубины скважины с помощью платы управления;
• сочетанию модуля механики и модуля электроники.
[0015] Более полно, технический результат достигается измерительным устройством для обеспечения взрывных работ, включающим модуль механики, модуль электроники и измерительный зонд. При этом модуль механики включает барабан с гибким элементом и двигатель, а гибкий элемент соединен с датчиком натяжения, сконфигурированным с возможностью определения натяжения гибкого элемента. Модуль электроники, в свою очередь, подключен к модулю механики и включает источник питания и плату управления. Измерительный зонд закреплен на конце гибкого элемента и включает датчик жидкости, в электрической цепи которого по крайней мере один контакт выполнен разомкнутым. Причем плата управления сконфигурирована по крайней мере с возможностью получения данных от датчика натяжения и датчика жидкости и определения глубины скважины.
[0016] Модуль механики включает в себя необходимое механическое оборудование для проведения измерений внутри скважины. При этом барабан с гибким элементом необходимы для спуска зонда в скважину. Двигатель, в свою очередь, обеспечивает вращение барабана, что позволяет осуществлять спуск и поднятие зонда. Гибкий элемент связывает барабан с зондом и позволяет опускать его в скважину, а датчик натяжения подключен к гибкому элементу и предназначен для измерения натяжения на гибком элементе. Измерительный зонд предназначен для сбора данных о параметрах скважины, а датчик жидкости в нем регистрирует наличие жидкости в скважине при замыкании контактов. Такой способ определения наличия жидкости позволяет обеспечить быстрый отклик системы, а также высокую точность определения наличия жидкости скважины и энергоэффективность такого измерения. Модуль электроники обеспечивает электронную обработку данных и управление системой. Источник питания в нем предоставляет энергию для питания всех компонентов системы, а плата управления принимает и обрабатывает данные от датчиков, а также принимает решения на основе этих данных. Таким образом, данная система, сочетая в себе механические, электронные и измерительные компоненты, позволяет в последствии провести безопасные и эффективные взрывные работы в скважинах.
[0017] Плата управления может дополнительно быть сконфигурирована с возможностью определения глубины по количеству оборотов барабана. Это является наиболее точным возможным способом измерения, т.к. при его применении возможно пренебрегать удлинением гибкого элемента под действием силы тяжести.
[0018] Также плата управления может дополнительно быть сконфигурирована с возможностью определения высоты водяного столба. Таким образом, становится возможным определять дополнительные параметры скважины. При этом определение высоты столба жидкости в скважине также может осуществляться по количеству оборотов двигателя от момента получения сигнала от датчика жидкости до момента получения сигнала от датчика натяжения.
[0019] В качестве гибкого элемента могут использовать стальную ленту. Она может быть намотана на барабан в один ряд и множество слоев. В этом случае, при определении глубины скважины и/или высоты водяного столба плата управления может быть сконфигурирована с возможностью корректировки длины стальной ленты в зависимости от разматываемого слоя стальной ленты, где длина первого слоя стальной ленты - длина окружности первого слоя, а длина последующих слоев - произведение длины окружности первого слоя на коэффициент разматываемого слоя, причем коэффициенты слоев меньше единицы. Это позволяет учесть, что длина разматываемой стальной ленты уменьшается с каждым слоем, и, как следствие, еще больше повысить точность определения высоты водяного столба и/или глубины скважины.
[0020] В качестве двигателя может использоваться электродвигатель для вращения барабана.
[0021] При этом плата управления может быть дополнительно сконфигурирована с возможностью управления двигателем барабана. Это позволяет автоматизировать процесс измерений.
[0022] Измерительный зонд может дополнительно включать плату, подключенную к датчику жидкости и включающую модуль беспроводной связи, а плата управления может дополнительно включать модуль беспроводной связи и быть сконфигурирована с возможностью получения данных от датчика жидкости через модуль беспроводной связи.
[0023] Измерительное устройство может дополнительно включать электромагнитный датчик, подключенный к двигателю и сконфигурированный с возможностью подсчета количества оборотов барабана.
[0024] Также заявленный технический результат достигается способом измерения для обеспечения взрывных работ. Согласно способу сначала опускают зонд, подвешенный на гибком элементе, в скважину посредством вращения барабана при помощи двигателя. При этом измеряют натяжение гибкого элемента при помощи датчика натяжения. Причем при наличии жидкости в скважине при достижении зондом жидкости, замыкаются контакты датчика жидкости и посылают сигнал на плату управления при помощи датчика жидкости и продолжают опускать гибкий элемент, а при достижении зондом дна скважины посылают сигнал об изменении натяжения на плату управления при помощи датчика натяжения и останавливают спуск зонда. Далее при помощи платы управления определяют наличие жидкости в скважине на основании показаний датчика жидкости и определяют глубину скважины.
[0025] Опускание зонда в скважину необходимо для определения параметров внутри скважины, в частности, для определения наличия жидкости и глубины скважины. При этом то, что это осуществляется посредством вращения барабана с использованием двигателя позволяет автоматизировать процесс спуска зонда. Измерение натяжения гибкого элемента в процессе необходимо для возможности детектирования последующих изменений в натяжении гибкого элемента, что будет указывать на достижение зондом дна скважины. Детектирование наличия жидкости при замыкании контактов позволяет добиться максимально быстрого отклика на жидкость, повысить энергоэффективность такого способа, а также непосредственно определить наличие жидкости в скважине. Однако, важно, чтобы после первого детектирования жидкости спуск зонда продолжался до достижения дна скважины. Определение достижения дна скважины по изменению натяжения необходимо для точного измерения глубины скважины и определения параметров для проведения взрывных работ. Отправка показаний датчиков на плату управления необходима для последующей обработки этих показаний платой управления. Определение наличия жидкости и глубины скважины позволяет собрать и обработать данные для дальнейшего анализа и принятия решений при проведении взрывных работ
[0026] При этом могут дополнительно осуществлять подсчет оборотов двигателя при помощи электромагнитного датчика, а глубину скважины могут определять по количеству оборотов двигателя от момента начала спуска зонда до момента остановки спуска зонда. Это является наиболее точным возможным способом измерения, т.к. при его применении возможно пренебрегать удлинением гибкого элемента под действием силы тяжести.
[0027] При наличии жидкости в скважине могут дополнительно определять высоту столба жидкости в скважине. Это позволяет собрать более полный набор данных о конкретной скважине перед непосредственным проведением взрывных работ в ней. Причем определять высоту столба жидкости в скважине также могут по количеству оборотов двигателя от момента получения сигнала от датчика жидкости до момента получения сигнала от датчика натяжения о достижении зондом дна скважины.
[0028] В качестве гибкого элемента могут использовать стальную ленту. Причем стальную ленту могут наматывать на барабан в один ряд и множество слоев, а при определении глубины скважины и/или столба жидкости могут корректировать длину стальной ленты в зависимости от разматываемого слоя стальной ленты, где длина первого слоя стальной ленты длина окружности первого слоя, а длина последующих слоев произведение длины окружности первого слоя на коэффициент разматываемого слоя, причем коэффициенты слоев меньше единицы. Это позволяет учесть, что длина разматываемой стальной ленты уменьшается с каждым слоем, и, как следствие, еще больше повысить точность определения высоты водяного столба и/или глубины скважины.
[0029] В качестве двигателя могут использовать электродвигатель, а вращение барабана могут осуществлять при помощи проводной цепи двигателя.
[0030] Могут дополнительно формировать управляющие команды для двигателя при помощи платы управления. Причем формировать могут по крайней мере одну из следующих команд: команду на спуск зонда, команду на остановку зонда и команду на подъем зонда. Это позволяет автоматизировать процесс измерений, что еще больше ускоряет измерения.
[0031] Сигналы от датчика жидкости могут посылать на плату управления с использованием беспроводной связи.
Описание чертежей
[0032] Объект притязаний по настоящей заявке описан по пунктам и четко заявлен в формуле изобретения. Упомянутые выше задачи, признаки и преимущества изобретения очевидны из нижеследующего подробного описания, в сочетании с прилагаемыми чертежами, на которых показано:
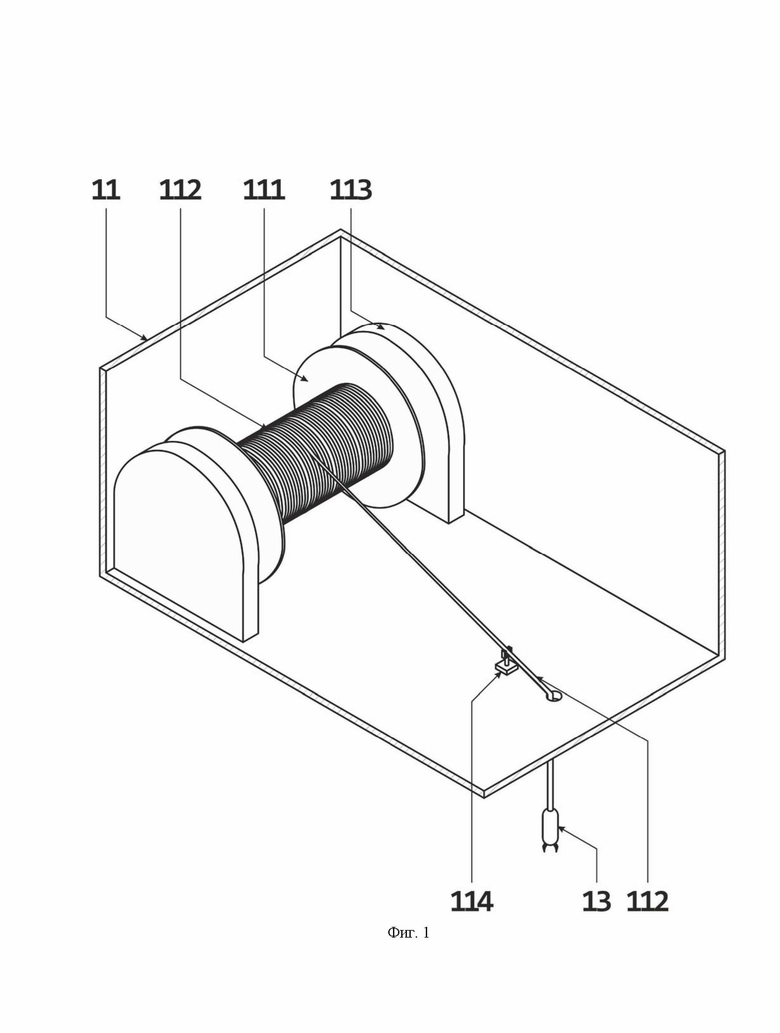
[0033] На Фиг. 1 представлен схематичный изометрический вид модуля механики измерительного устройства с закрепленным на гибком элементе измерительным зондом, согласно настоящему изобретению.
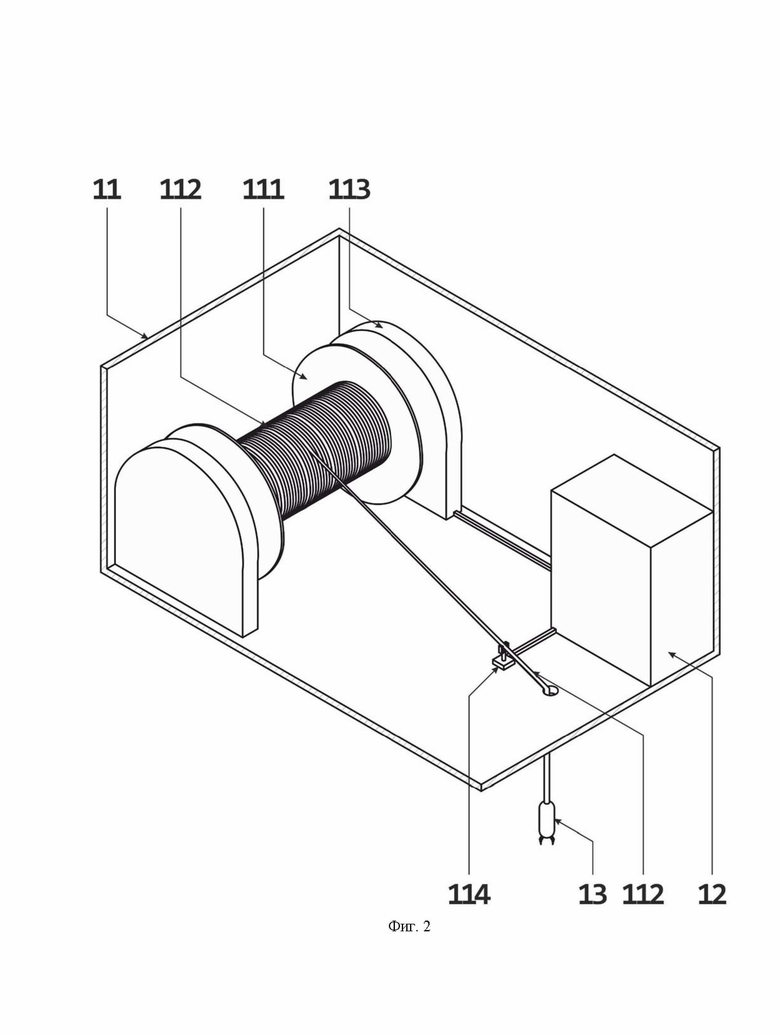
[0034] На Фиг. 2 представлен схематичный изометрический вид измерительного устройства для обеспечения взрывных работ в первом варианте размещения модуля электроники, согласно настоящему изобретению.
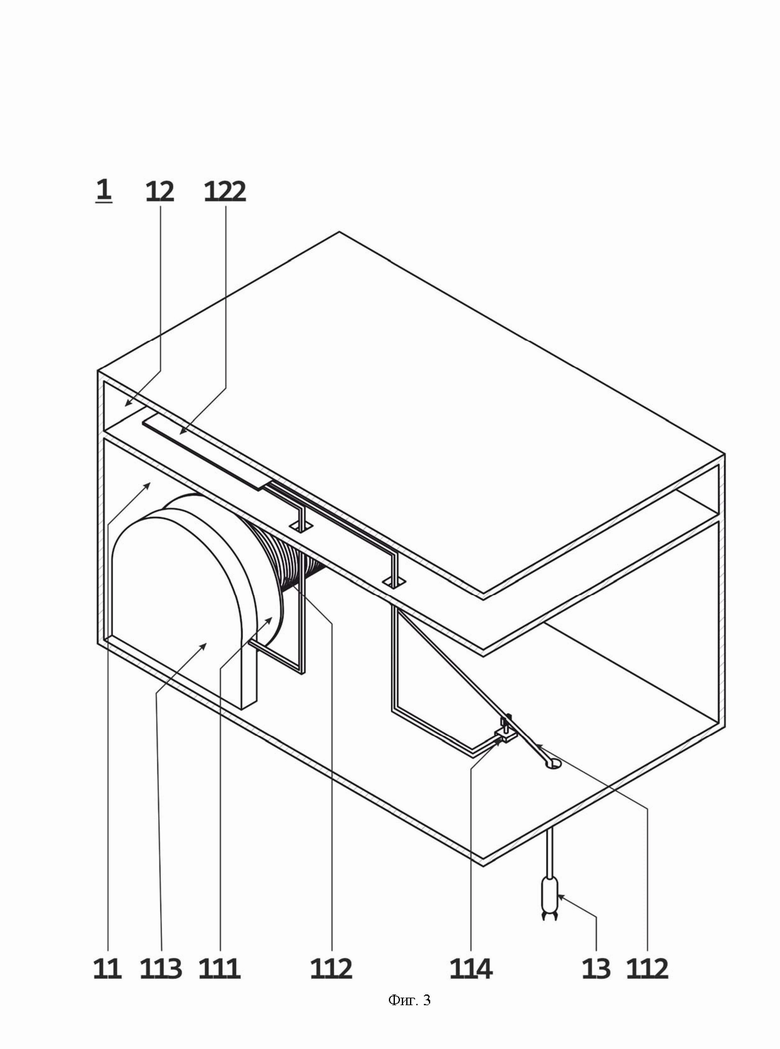
[0035] На Фиг. 3 представлен схематичный изометрический вид измерительного устройства для обеспечения взрывных работ во втором варианте размещения модуля электроники, согласно настоящему изобретению.
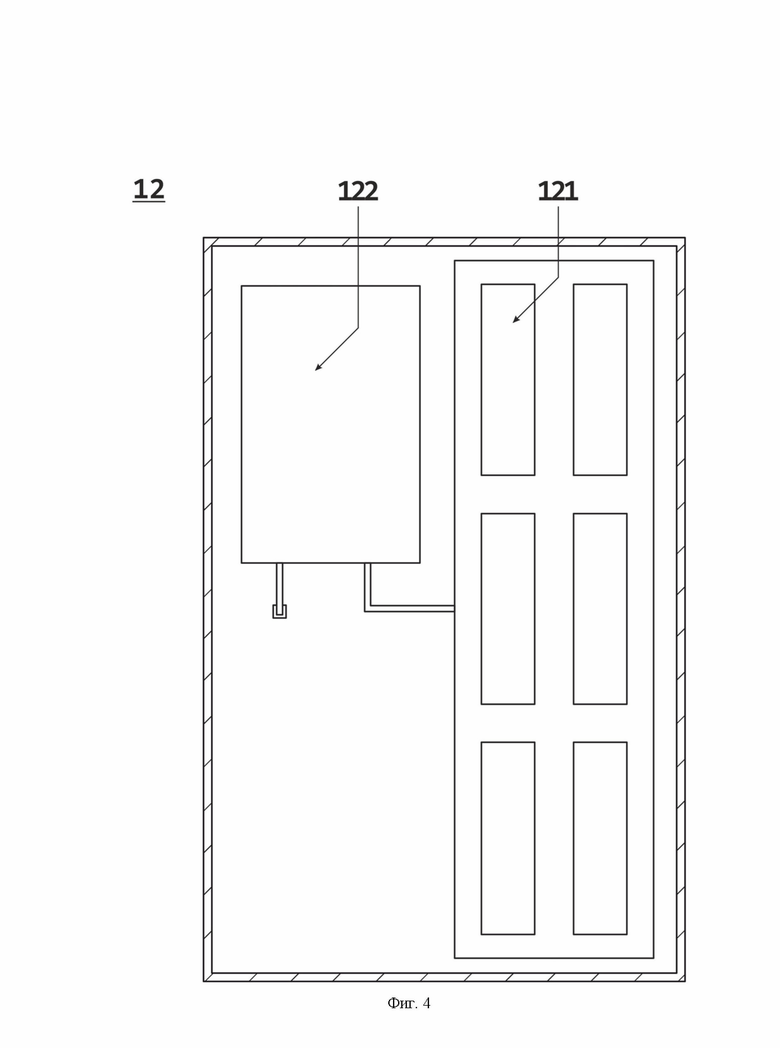
[0036] На Фиг. 4 представлен модуль электроники измерительного устройства в разрезе в виде сверху, согласно настоящему изобретению.
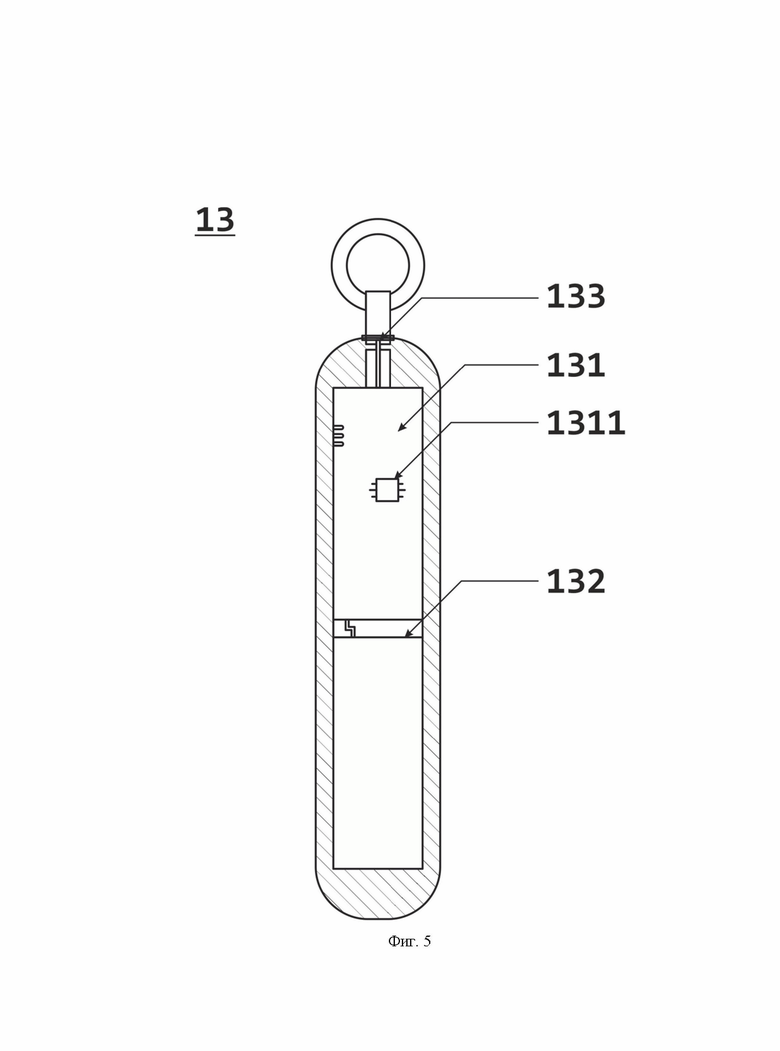
[0037] На Фиг. 5 представлен схематичный вид измерительного зонда в продольном разрезе.
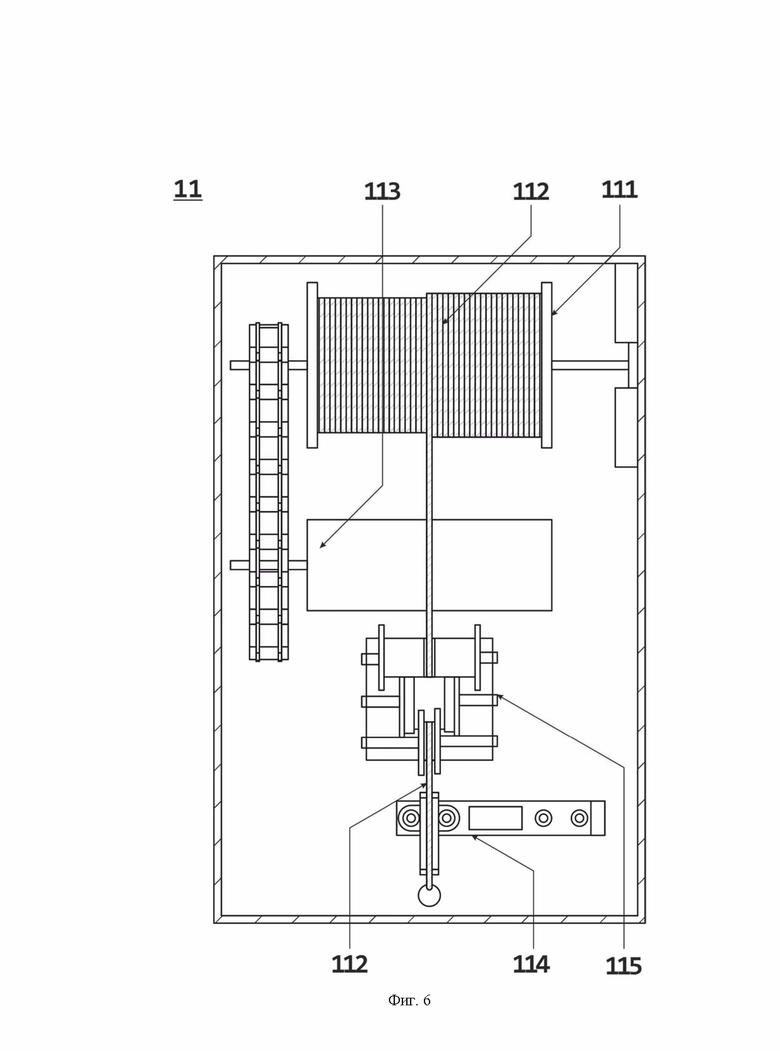
[0038] На Фиг. 6 представлен модуль механики измерительного устройства с дополнительными элементами в разрезе в виде сверху, согласно настоящему изобретению.
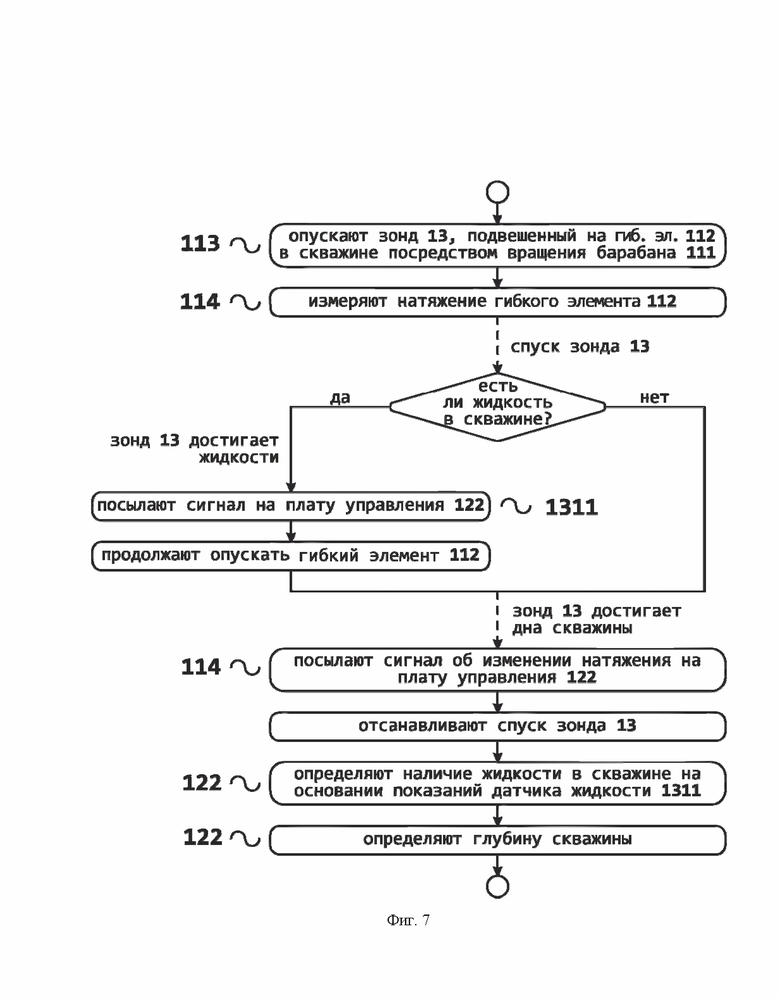
[0039] На Фиг. 7 представлена блок-схема, иллюстрирующая способ измерения для обеспечения взрывных работ, согласно настоящему изобретению.
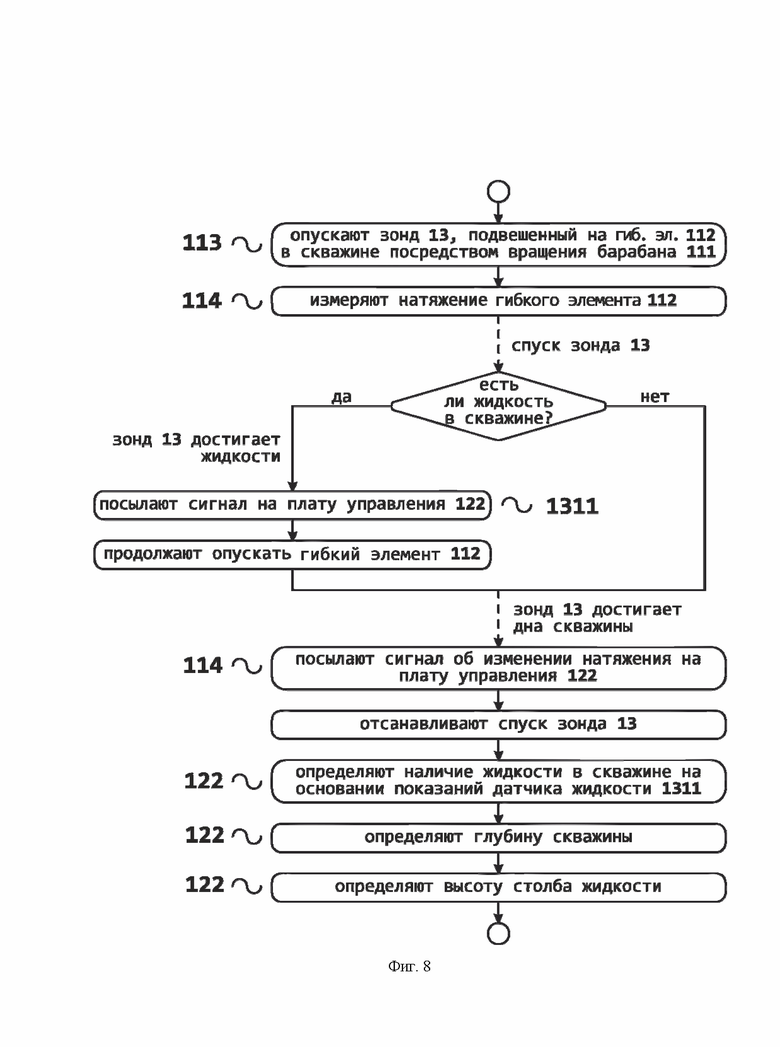
[0040] На Фиг. 8 представлена блок-схема, иллюстрирующая способ измерения для обеспечения взрывных работ при наличии водяного столба в скважине, согласно настоящему изобретению.
[0041] Данные фигуры поясняются следующими позициями: Позиция 1 - измерительное устройство; Позиция 11 модуль механики; Позиция 111 барабан; Позиция 112 -гибкий элемент; Позиция 113 - двигатель; Позиция 114 - датчик натяжения; Позиция 115 - кабелеукладчик; Позиция 12 модуль электроники; Позиция 121 источник питания; Позиция 122 - плата управления; Позиция 13 - измерительный зонд; Позиция 131 плата зонда; Позиция 1311 датчик жидкости; Позиция 132 - источник питания зонда;
Позиция 133 - изолированное место с разомкнутыми контактами.
Подробное описание изобретения
[0042] В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту, очевидно, каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
[0043] Кроме того, из приведенного изложения ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены несущественных признаков изобретения, сохраняющие суть и форму настоящего изобретения, очевидны для квалифицированных в предметной области специалистов.
[0044] Измерительное устройство 1 для обеспечения взрывных работ включает модуль механики 11, модуль электроники 12 и измерительный зонд 13. При этом модуль механики 11 включает барабан 111 с гибким элементом 112 и двигатель 113, а гибкий элемент 112 соединен с датчиком натяжения 114, сконфигурированным с возможностью определения натяжения гибкого элемента 112. Модуль электроники 12, в свою очередь, подключен к модулю механики 11 и включает источник питания 121 и плату управления 122. Измерительный зонд 13 закреплен на конце гибкого элемента 112 и включает датчик жидкости 1311, в электрической цепи которого по крайней мере один контакт выполнен разомкнутым. Причем плата управления 122 сконфигурирована по крайней мере с возможностью получения данных от датчика натяжения 114 и датчика жидкости 1311 и определения глубины скважины.
[0045] На Фиг. 1 представлен схематичный изометрический вид модуля механики 11 измерительного устройства 1 с закрепленным на гибком элементе 112 измерительным зондом 13, согласно настоящему изобретению. Как видно из Фигуры, модуль механики 11 включает корпус, в котором размещены барабан 111 с намотанным на него гибким элементом 112, а барабан 111 раскручивается посредством соединенного с ним двигателя 113. При раскрутке барабана 111 по часовой стрелке или против часовой стрелки происходит размотка или намотка гибкого элемента 112 соответственно. При размотке гибкого элемента 112 происходит опускание в скважину зонда 13, закрепленного на конце гибкого элемента 112, а сам гибкий элемент 112 проходит через датчик натяжения 114, измеряющий натяжение гибкого элемента 112, и отверстие в корпусе модуля механики 11.
[0046] Модуль электроники 12 может быть размещен внутри модуля механики 11, как это показано на Фиг. 2, или с любой из его сторон, например, сверху, как это показано на Фиг. 3. При этом модуль электроники 12 может не быть размещенным в отдельном корпусе, а его элементы (источник питания 121 и плата управления 122) могут быть просто размещены в корпусе модуля механики 11.
[0047] Под подключением модуля электроники 12 к модулю механики 11 подразумевается непосредственное подключение платы управления 122 к по крайней мере одному элементу модуля механики 11. В частности, плата управления 122 может быть подключена к двигателю 113 и/или к датчику натяжения 114 посредством проводного соединения. Однако, при наличии в датчике натяжения 114 и в плате управления 122 модулей беспроводного соединения данные от датчика натяжения 114 могут передаваться плате управления 122 посредством беспроводного соединения. В этом случае их проводное соединение не является обязательным. Проводное соединение двигателя 113 с модулем электроники 12, в свою очередь, может осуществляться через соединение двигателя 113 с источником питания 121 (в том случае, если для двигателя 113 не предусмотрен отдельный источник питания) или через соединение двигателя 113 с платой управления 122. Второй вариант может быть необходим в том случае, если плата управления 122 сконфигурирована с возможностью управления двигателем 113, т.е. с возможностью формирования команд для двигателя 113 и посылания их на двигатель 113.
[0048] На Фиг. 4 представлен модуль электроники 12 измерительного устройства 1 в разрезе в виде сверху, согласно настоящему изобретению, в варианте, когда модуль электроники 12 размещен на модуле механики 11. Как видно на Фигуре, источник питания 121 может подавать питание по крайней мере на плату управления 122. При этом плата управления 122 может включать различные элементы, позволяющие подавать напряжение от источника питания 121 на компоненты модуля механики 11 (например, различные делители напряжения, преобразователи напряжения и др.). [0049] Помимо показанного на Фиг. 4, модуль электроники 12 может включать и иные элементы. В частности, он может включать дисплей для отображения измеренных данных пользователям. Дисплей при этом должен быть подключен к плате управления 122 и быть выведен на поверхность корпуса устройства 1. Также модуль электроники 12 может включать подключенные к нему кнопки управления. С помощью кнопок управления пользователи смогут контролировать спуск измерительного зонда 13 в скважину, а также включение и выключение устройства 1 в целом.
[0050] Барабан 111 представляет собой устройство, используемое для намотки, хранения и разматывания гибкого элемента 112, каната или кабеля. В частности, барабан 111 может включать корпус, представляющий собой два диска, между которыми расположена втулка. На втулку наматывается гибкий элемент 112. Такой вариант выполнения барабана 111 представлен на Фигурах. Такая конструкция обеспечивает простоту в использовании и обслуживании, а также обеспечивает легкость замены гибкого элемента 112. Кроме того, такие барабаны могут быть довольно компактными, что делает их удобными для монтажа и транспортировки.
[0051] В иных вариантах выполнения барабана 111 он может включать и дополнительные элементы. В частности, если корпус барабана 111 выполнен закрытым, то в нем необходимо выполнить горловину, т.е. отверстие, через которое гибкий элемент 112 будет вводиться и выводиться из барабана 111. Помимо этого, корпус и/или втулка могут включать специальный край (или кант), позволяющий предотвратить спонтанное разматывание гибкого элемента 112. Также барабан 111 может быть оснащен подшипниками для улучшения плавности вращения при наматывании и разматывании гибкого элемента 112.
[0052] Сам барабан 111 может быть выполнен как стальным, так и пластиковым. Стальные барабаны обычно используются для тяжелых грузов. Они прочные и стойкие к воздействию внешних факторов. Пластиковые барабаны легче стальных и подходят для транспортировки легких гибких элементов. Они также могут быть удобными в монтаже и технических работах. В рамках настоящего изобретения пластиковые барабаны являются предпочтительными, т.к. измерительный зонд не является массивным и, как следствие, для его опускания в скважину может использоваться легкий гибкий элемент.
[0053] В целом, в качестве гибкого элемента 112 может использоваться трос, стальная лента (или иная металлическая лента или нить), кабель и другие их аналоги, способные удерживать на себе измерительный зонд 13, наматываться и разматываться и, при этом, являющиеся достаточно длинными для спуска зонда 13 в скважину.
[0054] Датчик натяжения 114 представляет собой специальное устройство, предназначенное для измерения силы, которая действует на гибкий элемент 112 и приводит к его растяжению или сжатию. Так, например, при попадании зонда 13 в столб воды, на зонд 13 и гибкий элемент 112 начнут действовать сила Архимеда, выталкивающая зонд 13 и гибкий элемент 112 наверх. Однако, в этом случае натяжение будет изменяться незначительно. Большее изменение силы натяжения произойдет в момент, когда зонд 13 опуститься на дно скважины. Тогда появится еще сила реакция опоры, также действующая на гибкий элемент 112 и изменяющая натяжение гибкого элемента 112.
[0055] В рамках настоящего изобретения могут использоваться разные типы датчиков натяжения, чье функционирование основано на разных физических принципах и законах. Выбор конкретного типа датчика может обуславливаться типом используемого гибкого элемента, в том числе от его материала, толщины и т.д. В частности, могут использоваться так называемые измерители деформации (резистивные, индуктивные, емкостные и др.). Эти датчики измеряют изменения в деформации материала под воздействием нагрузки. Они обычно используются для измерения натяжения в металлических компонентах. Помимо этого, могут использоваться датчики натяжения каната (винтовые, напряженные проволоки), специально разработанные для измерения натяжения в канатах, тросах, стальных лентах или нитях и кабелях. Они часто применяются в грузоподъемной и металлообрабатывающей промышленности. В иных вариантах могут использоваться гидравлические и пневматические датчики натяжения, измеряющие натяжение с использованием гидравлического или пневматического давления. Также возможным вариантом является применение акустического датчика натяжения, регистрирующего звуковые волны, создаваемые при изменении натяжения, или ультразвуковой датчик, измеряющий натяжение с помощью распространения ультразвуковых волн через гибкий элемент. В случае, если гибкий элемент выполнен из оптоволоконного материала, то эффективным вариантом будет использование оптического датчика натяжения. Они измеряют натяжение с использованием оптических эффектов, таких как изменение светового потока при деформации. Также возможно применение электромагнитных, пьезоэлектрических и магнитных датчиков для измерения натяжения.
[0056] Двигатель 113 предназначен для создания вращающего движения, которое передается на барабан 111 для размотки или намотки гибкого элемента 112. Точные характеристики могут варьироваться в зависимости от конкретного применения и условий эксплуатации, в том числе, как и в случае с барабаном 111, это зависит от веса гибкого элемента 112 и измерительного зонда 13. Двигатель 113 позволяет автоматизировать процесс размотки и намотки гибкого элемента 112. При этом с помощью него возможно контролировать скорость и направление вращения барабана 111.
[0057] В качестве двигателя 113 могут использовать различные типы двигателей. Например, могут использовать пневматический двигатель, в котором используют сжатый воздух для привода механизмов, что может быть полезно в специфических средах или в условиях, где электроэнергия ограничена. Помимо этого, могут применяться дизельные двигатели в тех случаях, когда зонд и гибкий элемент имеют большую массу и требуют высокой мощности, а доступ к электроэнергии ограничен. Аналогично могут использоваться и газовые двигатели. Также для тяжелых зондов подходят гидравлические двигатели, преобразовывающие гидравлическую энергию в механическую. Предпочтительным в рамках настоящего изобретения является использование электрического двигателя, т.к. зонд может быть выполнен компактным и легким, что позволит увеличить энергоэффективность устройства 1 и в целом снизить потребляемую энергию. Электродвигатели работают от электрического источника питания и преобразуют электрическую энергию в механическую. Обычно они компактны, легки и относительно просты в управлении. Могут предоставлять точный контроль скорости и направления движения.
[0058] Основой для конструкции любого электродвигателя являются два ключевых компонента: неподвижная часть, называемая «статор», и подвижная часть, известная как «ротор». Под воздействием электрического тока, протекающего через обмотки статора, возникает вращающееся электромагнитное поле. Это поле воздействует на обмотку ротора, индуцируя в ней электрический ток и заставляя ротор вращаться в определенном направлении. Основные элементы могут быть установлены в корпус для изоляции элементом и обеспечения их безопасности в ходе эксплуатации.
[0059] Для подключения барабана 111 к двигателю 113 (для передачи движения от двигателя 113 к барабану 111) может использоваться проводная цепь, прикрепленная к валу электродвигателя и валу барабана 111. В данном случае, такая цепь обычно крепится к зубчатым колесам, которые расположены на валу электродвигателя и на барабане 111. Одно зубчатое колесо соединено с валом электродвигателя, а другое - с валом барабана. Когда электродвигатель работает и приводит в движение свой вал, зубчатое колесо на нем начинает вращаться. Затем через цепь, это вращение передается на зубчатое колесо на валу барабана 111, что приводит к размотке или намотке гибкого элемента 112 в зависимости от направления вращения. Такая система с цепями и зубчатыми колесами позволяет эффективно передавать движение от электродвигателя к барабану 111, обеспечивая контролируемую размотку и намотку гибкого элемента 112. Однако, барабан 111 может быть подключен к двигателю 113 напрямую, как это схематично изображено на Фиг. 1.
[0060] Измерительный зонд 13 представляет собой специальное устройство, предназначенное для проведения измерений внутри скважины с целью получения данных о геологических, гидрогеологических, или других параметрах, характеризующих состояние подземных формаций и условия работы скважины. Его закрепление на конце гибкого элемента 112, во-первых, позволяет повысить натяжение гибкого элемента 112 до момента касания зондом 13 дна скважины, повышая при этом разницу в натяжении гибкого элемента 112 до и после касания, что позволяет с большей точностью определять момент касания. Во-вторых, измерительный зонд 13, включающий датчик жидкости 1311 позволяет определять наличие жидкости в скважине.
[0061] Датчик жидкости 1311 является устройством, предназначенным для обнаружения или измерения уровня или наличия жидкости в контейнерах, резервуарах, скважинах и других средах. В рамках настоящего изобретения достаточным является в целом определение наличия жидкости в скважине. В рамках настоящего изобретения в электрической цепи датчика жидкости 1311 по крайней мере один контакт выполнен разомкнутым. Этот метод основан на измерении электрической проводимости жидкости. Когда вода присутствует и замыкает электрическую цепь между двумя контактами, это может быть замечено с помощью соответствующей электроники. Данный метод измерения является более энергоэффективным, т.к. до момента замыкания цепи на датчик жидкости 1311 (или даже на весь измерительный зонд 13) может вообще не подаваться питание. Это особенно важно, если измерительный зонд 13 включает автономный источник питания 132 (например, батарейки). Помимо этого, датчик жидкости 1311, устроенный таким образом, обладает повышенной чувствительностью к детектированию жидкости, в частности воды, т.к. она обладает высокой проводимостью, а также быстрый отклик (как только вода касается контактов, срабатывание происходит почти мгновенно). При этом в этом случае важно, чтобы вся остальная электрическая цепь была надежно изолирована для избежания попадания туда воды. В противном случае, погружение датчика жидкости 1311 в воду может привести к короткому замыканию. [0062] Плата управления 122 (или управляющая плата) - это электронная плата или плата схемы, предназначенная для управления различными функциями или компонентами в электронных устройствах. Она может содержать микроконтроллеры, микросхемы усилителей, схемы обработки сигналов и другие элементы, необходимые для координации работы устройства 1. При этом плата 122 предпочтительно должна включать модуль памяти и процессор. На модуле памяти может быть записана программа обработки собираемых датчиками данных по крайней мере для определения глубины скважины и определения наличия жидкости в скважине.
[0063] Одним из вариантов того, как плата управления 122 может определять наличие жидкости в скважине является выполнение гибкого элемента 112 изолированным кабелем, включенным в электрическую цепь датчика жидкости 1311 и подключенного к плате управления 122. Тогда при замыкании контактов датчика жидкости 1311 будет проходить электрический ток. При поступлении электрического тока по кабелю на плату управления 122, плата управления 122 будет понимать, что измерительный зонд 13 достиг жидкости. Таким образом, может осуществляться определение наличия жидкости в скважине.
[0064] В ином варианте измерительный зонд 13 может включать плату 131, как это показано на Фиг. 5. Плата 131 может быть подключена к датчику жидкости 1311 (или включать датчик жидкости 1311) и включать модуль беспроводной связи (на Фигуре не показан). При этом плата управления 122 может дополнительно включать модуль беспроводной связи и быть сконфигурирована с возможностью получения данных от датчика жидкости 1311 через модуль беспроводной связи. Таким образом, гибкий элемент 112 может не являться проводящим, что облегчает его конструкцию, т.к. в этом случае он не требует изоляции. При этом может дополнительно повышаться энергоэффективность устройства 1 в целом, т.к. более легкий гибкий элемент 112 позволяет применять двигатель 113 с пониженной мощностью.
[0065] Определение глубины скважины с помощью гибкого элемента 112 может осуществляться множеством различных способов. Объединяющим принципом всех таких способов является измерение длины гибкого элемента 112, которая была отмотана с барабана 111. В частности, может использоваться шкала на гибком элементе 112 или маркировка, глубиномеры или электронные системы измерения. Однако, глубиномеры и электронные системы измерения требуют дополнительной мощности источника питания всего устройства 1, в связи с чем снижают энергоэффективность установки. Маркеры и шкалы, в свою очередь, могут со временем стираться и, тем самым, требовать замены гибкого элемента 112 или повторного нанесения шкалы или маркеров.
[0066] В ином варианте плата управления 122 может быть сконфигурирована с возможностью определения глубины по количеству оборотов барабана 111. При этом подсчет количества оборотов может осуществляться, например, с применением инкрементального энкодера. Инкрементальный энкодер представляет собой устройство, которое генерирует электрические импульсы в зависимости от вращения барабана 111. Он имеет два основных сигнальных выхода: сигналы А и В. Эти сигналы имеют некоторую фазовую разницу друг относительно друга. Сигналы А и В подаются на счетчик энкодера. Счетчик отслеживает изменения этих сигналов и подсчитывает количество оборотов. Разрешение энкодера определяет, сколько импульсов он генерирует за один полный оборот. Например, энкодер с разрешением 100 импульсов на оборот сгенерирует 100 импульсов при каждом обороте. После того как счетчик подсчитал импульсы, полученные от энкодера, эти данные могут быть использованы для определения количества оборотов барабана 111. Подсчитанное таким образом количество оборотов барабана 111 может отправляться на плату управления 122, которая рассчитает длину спущенного гибкого элемента 112 на основании данных о количестве оборотов и данных о диаметре вала барабана 111, длине вала барабана 111 и диаметре гибкого элемента 112. При этом учитывается количество оборотов барабана 111 от момента начала спуска гибкого элемента 112 в скважину до срабатывания датчика натяжения 114, оповещающего о том, что измерительный зонд 13 достиг дна скважины.
[0067] Также плата управления 122 может дополнительно быть сконфигурирована с возможностью определения высоты водяного столба (или столба иной жидкости) в скважине при наличии воды (или иной жидкости) в скважине. Для этого плата управления 122 будет учитывать количество оборотов барабана 111 от момента срабатывания датчика жидкости 1311 до момента срабатывания датчика натяжения 114. Важно отметить, что натяжение гибкого элемента 112 будет меняться не только при достижении дна скважины, но и при достижении гибким элементом 112 водяного столба. Чтобы срабатывание датчика натяжение 114 не остановило измерение глубины скважины при достижении водного столба, может применяться несколько разных способов. Во-первых, в плату управления 112 (или в датчик натяжения 114) может быть программно заложено пороговое значение, при котором при попадании зонда 13 в воду значение изменения натяжения гибкого элемента 122 не учитывается, так как оно очень мало. При достижении зондом 13 дна значение натяжения изменяется сильно, и лишь оно может приводить к срабатыванию датчика 114. В ином варианте возможно в плату управления 122 может быть программно заложено не останавливать процесс размотки гибкого элемента 112 при получении сигнала одновременно от датчика жидкости 1311 и от датчика натяжения 114. Однако, во втором случае плата управления 122 должна быть сконфигурирована с возможностью управления двигателем 113 измерительного устройства 1.
[0068] Для увеличения точности определения глубины скважины по количеству оборотов барабана 111 гибкий элемент 112 может быть предварительно намотан на вал барабана 111 в определенное количество слоев. Например, при использовании троса в качестве гибкого элемента 112, трос 112 может быть намотан на барабан 111 в три слоя (возможно любое количество слоев, важно при этом, чтобы в плату управления 122 было программно заложено количество рядом в каждом слое). В этом случае, при определении глубины скважины и/или высоты водяного столба плата управления 122 может быть сконфигурирована с возможностью корректировки длины троса 112 в зависимости от разматываемого слоя троса 112. Длина троса 112 первого слоя - заранее измеренная длина окружности первого слоя, длина второго слоя произведение длины окружности первого слоя на коэффициент второго слоя, длина третьего слоя произведение длины окружности первого слоя на коэффициент третьего слоя, причем коэффициенты второго и третьего слоя меньше единицы. Это позволяет учесть, что длина разматываемого троса уменьшается с каждым слоем, и, как следствие, еще больше повысить точность определения высоты водяного столба и/или глубины скважины. Важно отметить, что под первым слоем понимается верхний слой троса 112.
[0069] Коэффициенты определяются радиусом вала барабана 111 и диаметром троса 112. Так, длина окружности первого слоя определяется выражением:  где L1 - длина окружности первого слоя, R - радиус вала барабана 111, n - количество слоев, в которое намотан трос 112, d - диаметр троса 112. Тогда длина второго слоя определяется как
где L1 - длина окружности первого слоя, R - радиус вала барабана 111, n - количество слоев, в которое намотан трос 112, d - диаметр троса 112. Тогда длина второго слоя определяется как  а длина третьего как
а длина третьего как  и так далее. Таким образом, коэффициент каждого слоя (а) может определяться выражением:
и так далее. Таким образом, коэффициент каждого слоя (а) может определяться выражением: 
 где ai - коэффициент i-ого слоя, а i - порядковый номер слоя. Длина каждого слоя тогда определяется как
где ai - коэффициент i-ого слоя, а i - порядковый номер слоя. Длина каждого слоя тогда определяется как  . Точно таким же образом могут определяться коэффициенты при использовании кабеля.
. Точно таким же образом могут определяться коэффициенты при использовании кабеля.
[0070] Аналогично, при использовании стальной ленты в качестве гибкого элемента 112, стальную ленту могут наматывать на барабан 111 в один ряд и множество слоев, а при определении глубины скважины и/или столба жидкости могут корректировать длину стальной ленты в зависимости от разматываемого слоя стальной ленты, где длина первого слоя стальной ленты длина окружности первого слоя, а длина последующих слоев произведение длины окружности первого слоя на коэффициент разматываемого слоя, причем коэффициенты слоев меньше единицы. Они могут вычисляться, например, как это было показано выше. Это также позволяет учесть, что длина разматываемой стальной ленты уменьшается с каждым слоем, и, как следствие, еще больше повысить точность определения высоты водяного столба и/или глубины скважины. При этом важно наматывать ленту именно в один ряд, т.к. лента является практически плоской. При ее намотке в несколько рядов не будет плотного прилегания ленты к втулке барабана 111, а также разных сегментов ленты друг к другу. При этом могут формироваться заломы, которые в последствие приведут к поломке ленты.
[0071] Для еще большего повышения точности такого метода определения глубины скважины, в случае применения троса или кабеля, трос или кабель может укладываться при помощи кабелеукладчика 115. Это позволяет равномерно наматывать трос или кабель на барабан 111. Это в сочетании с учетом уменьшения длины разматываемого гибкого элемента 112 с каждым слоем позволяет еще больше повысить точность определения высоты водяного столба и/или глубины скважины по количеству оборотов барабана 111 (или двигателя 113). Однако, при применении стальной ленты кабелеукладчик не привносит более равномерной намотки, т.к. стальная лента наматывается только в один ряд.
[0072] При этом применение ленты предпочтительнее, чем применение троса. Это связано с тем, что при падении натяжения на тросе он расслабляется и на барабане 111, в результате чего может происходить спутывание, приводящее к падению точности, нестабильной работе и заклиниваниям механизма, в том числе при применении дополнительных натяжителей и укладчиков. То же может происходить и с легкими кабелями. В связи с этим, применение стальной ленты или иной металлической ленты является предпочтительным вариантом и обеспечивает большую надежность в большинстве случаев.
[0073] В ином варианте реализации устройства 1 для подсчета количества оборотов барабана 111 измерительное устройство 1 может дополнительно включать электромагнитный датчик (на Фигурах не показан), подключенный к двигателю 113 и сконфигурированный с возможностью подсчета количества оборотов барабана 111. Однако, данный способ может применяться лишь при условии, если в качестве двигателя 113 используется электродвигатель. Этот метод основан на детектировании изменений магнитного поля, создаваемого вращающимся магнитом внутри двигателя 113. Многие электродвигатели имеют внутренние магниты, которые вращаются вместе с валом двигателя 113. При вращении магниты создают электромагнитное поле. В этом случае электромагнитный датчик может быть размещен рядом с двигателем 113 так, чтобы он мог регистрировать изменения магнитного поля при каждом обороте. Тогда при каждом обороте двигателя и, соответственно, изменении магнитного поля, датчик генерирует электрический сигнал. Эти сигналы могут быть поданы на счетчик датчика (или платы управления 122), который подсчитывает количество импульсов, что позволяет определить количество оборотов. Результаты подсчета могут быть использованы для мониторинга количества оборотов барабана 111.
[0074] На Фиг. 6 представлен модуль механики 11 измерительного устройства 1 с дополнительными элементами в разрезе в виде сверху, согласно настоящему изобретению. Как видно на Фигуре, модуль механики 11 включает барабан 111 с гибким элементом 112 и двигатель 113, а гибкий элемент 112 соединен с датчиком натяжения 114, сконфигурированным с возможностью определения натяжения гибкого элемента 112. При этом двигатель 113 соединен с барабаном 111 посредством проводной цепи, а гибкий элемент 112 при намотке и размотке проходит через кабелеукладчик 115.
[0075] Также заявленный технический результат достигается способом измерения для обеспечения взрывных работ. На Фиг. 7 представлена блок-схема, иллюстрирующая способ измерения для обеспечения взрывных работ, согласно настоящему изобретению. Согласно способу, сначала опускают зонд 13, подвешенный на гибком элементе 112, в скважину посредством вращения барабана 111 при помощи двигателя 113. При этом измеряют натяжение гибкого элемента 112 при помощи датчика натяжения 114. Причем при наличии жидкости в скважине при достижении зондом 13 жидкости, замыкаются контакты датчика жидкости 1311 и посылают сигнал на плату управления 122 при помощи датчика жидкости 1311 и продолжают опускать гибкий элемент 112, а при достижении зондом 13 дна скважины посылают сигнал об изменении натяжения на плату управления 122 при помощи датчика натяжения 114 и останавливают спуск зонда 13. Далее при помощи платы управления 122 определяют наличие жидкости в скважине на основании показаний датчика жидкости 1311 и определяют глубину скважины.
[0076] При наличии жидкости в скважине могут дополнительно определять высоту водяного столба. Блок-схема, иллюстрирующая способ измерения для обеспечения взрывных работ при наличии водяного столба в скважине, согласно настоящему изобретению, представлена на Фиг. 8. В этом случае после или перед определением глубины скважины могут дополнительно определять высоту водяного столба.
[0077] При этом могут дополнительно осуществлять подсчет оборотов двигателя 113 при помощи электромагнитного датчика, а глубину скважины могут определять по количеству оборотов двигателя от момента начала спуска зонда 13 до момента остановки спуска зонда 13. Это является наиболее точным возможным способом измерения, т.к. при его применении возможно пренебрегать удлинением гибкого элемента 112 под действием силы тяжести. В частности, этот метод является более точным, чем установление меток на гибком элементе 112, а также позволяет повысить срок эксплуатации гибкого элемента 112 до его замены.
[0078] При наличии жидкости в скважине могут дополнительно определять высоту столба жидкости в скважине. Это позволяет собрать более полный набор данных о конкретной скважине перед непосредственным проведением взрывных работ в ней. Причем определять высоту столба жидкости в скважине также могут по количеству оборотов двигателя 113 от момента получения сигнала от датчика жидкости 1311 до момента получения сигнала от датчика натяжения 114 о достижении зондом 13 дна скважины.
[0079] В качестве гибкого элемента 112 могут использовать стальную ленту. Причем стальную ленту могут наматывать на барабан 111 в один ряд и множество слоев, а при определении глубины скважины и/или столба жидкости могут корректировать длину стальной ленты в зависимости от разматываемого слоя стальной ленты, где длина первого слоя стальной ленты - длина окружности первого слоя, а длина последующих слоев -произведение длины окружности первого слоя на коэффициент разматываемого слоя, причем коэффициенты слоев меньше единицы. Это позволяет учесть, что длина разматываемой стальной ленты уменьшается с каждым слоем, и, как следствие, еще больше повысить точность определения высоты водяного столба и/или глубины скважины.
[0080] В качестве двигателя 113 могут использовать электродвигатель, а вращение барабана 111 могут осуществлять при помощи проводной цепи двигателя 113. В ином варианте цепь двигателя 113 может отсутствовать, а вращение барабана 111 могут осуществлять посредством его прямого подключения к двигателю 113.
[0081] Могут дополнительно формировать управляющие команды для двигателя 113 при помощи платы управления 122. Причем формировать могут по крайней мере одну из следующих команд: команду на спуск зонда 13, команду на остановку зонда 13 и команду на подъем зонда 13. Это позволяет автоматизировать процесс измерений, что еще больше ускоряет измерения.
[0082] Сигналы от датчика жидкости 1311 могут посылать на плату управления 122 с использованием беспроводной связи. В противном варианте необходимо, чтобы гибкий элемент 112 являлся кабелем, подключенным к плате управления 122 для осуществления проводной передачи данных от датчика жидкости 1311, иначе невозможно определять высоту водяного столба по количеству оборотов барабана 111, т.к. необходимо будет дождаться возвращения зонда 13 на поверхность и только тогда с него будут сниматься показания. Однако, в случае если в памяти зонда 13 будут сохраняться данные о времени замыкания контактов, то данный вариант также возможен, хотя и является более длительным и трудозатратным, т.к. показания с датчика жидкости 1311 придется снимать вручную.
[0083] Важно отметить, что любые дополнительные элементы и функции измерительного устройства 1, описанные выше, могут использоваться в устройстве 1 по отдельности, все вместе одновременно, а также в любой комбинации. Реализация устройства 1 с любым дополнительным элементом или дополнительной функцией будет приводить к достижению дополнительных технических результатов, описанных выше, наряду с основным техническим результатом. Помимо этого, любой из дополнительных признаков устройства 1 может быть интерпретирован как дополнительный признак способа измерения для обеспечения взрывных работ. Аналогично любой из дополнительных признаков способа измерения для обеспечения взрывных работ может быть интерпретирован как дополнительный признак конструкции измерительного устройства 1.
[0084] В настоящих материалах заявки представлено предпочтительное раскрытие осуществления заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИСЕРДЕЧНОЙ И ВНУТРИСОСУДИСТОЙ ХИРУРГИЧЕСКОЙ ПРОЦЕДУРЫ, СОДЕРЖАЩЕЕ ЭНДОЛЮМИНАЛЬНЫЙ УЛЬТРАЗВУКОВОЙ ЗОНД | 2016 |
|
RU2713981C2 |
| ЛЕГКООЧИЩАЕМЫЙ ТЕРМИНАЛ ВИЗУАЛЬНОГО МОНИТОРИНГА ЗЕРНА | 2021 |
|
RU2805640C1 |
| ДОСТУП В МНОГОСТВОЛЬНУЮ СКВАЖИНУ С ПЕРЕДАЧЕЙ ДАННЫХ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2014 |
|
RU2682288C2 |
| АГРЕГАТ ДЛЯ РЕМОНТА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН И СПОСОБ СПУСКА И ПОДЪЕМА ГИБКОЙ ТРУБЫ С ПОМОЩЬЮ ДАННОГО АГРЕГАТА | 2012 |
|
RU2520976C2 |
| ОСУЩЕСТВЛЯЕМЫЕ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ НА СТОРОНЕ ДОБЫЧИ КОНТРОЛЬ И УПРАВЛЕНИЕ ДЛЯ ПРИМЕНЕНИЙ, ПРЕДУСМАТРИВАЮЩИХ ИЗВЛЕЧЕНИЕ ФЛЮИДОВ С ПОМОЩЬЮ НАГРЕВАНИЯ | 2007 |
|
RU2341652C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПЛАСТА (ВАРИАНТЫ) | 2005 |
|
RU2378511C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СВОЙСТВ ГОРНЫХ ПОРОД В СКВАЖИНАХ ПРИКОНТУРНОГО МАССИВА ВЫРАБОТОК | 2001 |
|
RU2230904C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ РЕЗЕРВУАРОВ И УРОВНЯ ЖИДКОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2071596C1 |
| УПРАВЛЕНИЕ УСТАНОВКОЙ ГИБКИХ НАСОСНО-КОМПРЕССИОННЫХ ТРУБ НА ПЛОЩАДКЕ СКВАЖИНЫ | 2018 |
|
RU2744468C1 |
Настоящее изобретение относится к измерительному оборудованию и способам измерения глубины скважины и определения наличия жидкости в скважинах при обеспечении взрывных работ. Устройство включает модуль механики, модуль электроники и измерительный зонд. При этом модуль механики включает барабан с гибким элементом и двигатель, а гибкий элемент соединен с датчиком натяжения, сконфигурированным с возможностью определения натяжения гибкого элемента. Модуль электроники, в свою очередь, подключен к модулю механики и включает источник питания и плату управления. Измерительный зонд закреплен на конце гибкого элемента и включает датчик жидкости, в электрической цепи которого по крайней мере один контакт выполнен разомкнутым. Причем плата управления сконфигурирована по крайней мере с возможностью получения данных от датчика натяжения и датчика жидкости и определения глубины скважины. Технический результат - обеспечение возможности измерения глубины скважины и детектирования наличия жидкости в скважине с повышенной точностью и скоростью измерения. 2 н. и 18 з.п. ф-лы, 8 ил.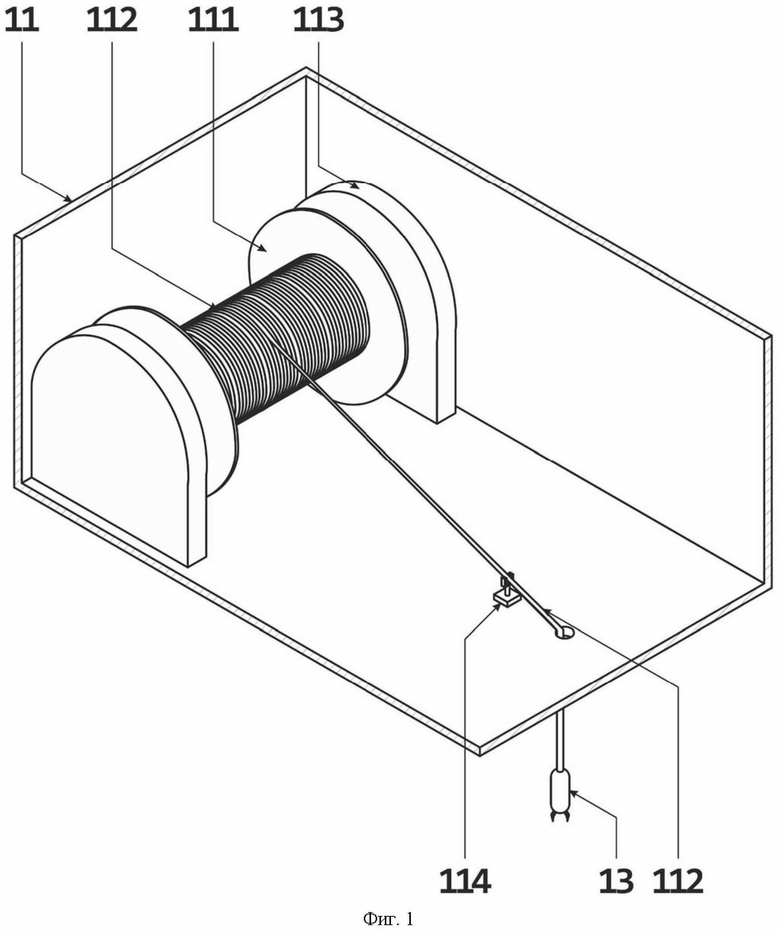
1. Устройство для измерения глубины скважины и обнаружения в ней жидкости при обеспечении взрывных работ, включающее:
- модуль механики, включающий барабан с гибким элементом, двигатель, причем гибкий элемент соединен с датчиком натяжения, сконфигурированным с возможностью определения натяжения гибкого элемента;
- модуль электроники, подключенный к модулю механики и включающий источник питания и плату управления; и
- измерительный зонд, закрепленный на конце гибкого элемента и включающий датчик жидкости, в электрической цепи которого по крайней мере один контакт выполнен разомкнутым,
причем плата управления сконфигурирована по крайней мере с возможностью:
- получения данных от датчика натяжения и датчика жидкости; и
- определения глубины скважины.
2. Измерительное устройство по п. 1, отличающееся тем, что плата управления сконфигурирована с возможностью определения глубины по количеству оборотов барабана.
3. Измерительное устройство по п. 1, отличающееся тем, что плата управления дополнительно сконфигурирована с возможностью определения высоты водяного столба.
4. Измерительное устройство по п. 3, отличающееся тем, что плата управления сконфигурирована с возможностью определения высоты столба жидкости в скважине по количеству оборотов двигателя от получения сигнала от датчика жидкости до получения сигнала от датчика натяжения.
5. Измерительное устройство по п. 1, отличающееся тем, что в качестве гибкого элемента используется стальная лента.
6. Измерительное устройство по п. 5, отличающееся тем, что стальная лента намотана на барабан в один ряд и множество слоев, а плата управления сконфигурирована с возможностью корректировки длины стальной ленты в зависимости от разматываемого слоя стальной ленты, где длина первого слоя стальной ленты - длина окружности первого слоя, а длина последующих слоев - произведение длины окружности первого слоя на коэффициент разматываемого слоя, причем коэффициенты слоев меньше единицы.
7. Измерительное устройство по п. 1, отличающееся тем, что в качестве двигателя используется электродвигатель.
8. Измерительное устройство по п. 1, отличающееся тем, что плата управления дополнительно сконфигурирована с возможностью управления двигателем.
9. Измерительное устройство по п. 1, отличающееся тем, что измерительный зонд дополнительно включает плату, подключенную к датчику жидкости и включающую модуль беспроводной связи, а плата управления дополнительно включает модуль беспроводной связи и сконфигурирована с возможностью получения данных от датчика жидкости через модуль беспроводной связи.
10. Измерительное устройство по п. 6, отличающееся тем, что дополнительно включает электромагнитный датчик, подключенный к двигателю и сконфигурированный с возможностью подсчета количества оборотов барабана.
11. Способ измерения глубины скважины и обнаружения в ней жидкости при обеспечении взрывных работ, по которому:
- опускают зонд, подвешенный на гибком элементе, в скважину посредством вращения барабана при помощи двигателя;
- измеряют натяжение гибкого элемента при помощи датчика натяжения;
причем при наличии жидкости в скважине при достижении зондом жидкости замыкаются контакты датчика жидкости и посылают сигнал на плату управления при помощи датчика жидкости и продолжают опускать гибкий элемент,
а при достижении зондом дна скважины посылают сигнал об изменении натяжения на плату управления при помощи датчика натяжения и останавливают спуск зонда, причем при помощи платы управления:
- определяют наличие жидкости в скважине на основании показаний датчика жидкости,
- определяют глубину скважины.
12. Способ по п. 11, отличающийся тем, что дополнительно осуществляют подсчет оборотов двигателя при помощи электромагнитного датчика, а глубину скважины определяют по количеству оборотов двигателя от начала спуска зонда до остановки спуска зонда.
13. Способ по п. 11, отличающийся тем, что при наличии жидкости в скважине дополнительно определяют высоту столба жидкости в скважине.
14. Способ по п. 13, отличающийся тем, что определяют высоту столба жидкости в скважине по количеству оборотов двигателя от получения сигнала от датчика жидкости до получения второго сигнала от датчика натяжения.
15. Способ по п. 11, отличающийся тем, что в качестве гибкого элемента используют стальную ленту.
16. Способ по п. 15, отличающийся тем, что стальную ленту наматывают на барабан в один ряд и множество слоев, а при определении глубины скважины и/или столба жидкости корректируют длину стальной ленты в зависимости от разматываемого слоя стальной ленты, где длина первого слоя стальной ленты - длина окружности первого слоя, а длина последующих слоев - произведение длины окружности первого слоя на коэффициент разматываемого слоя, причем коэффициенты слоев меньше единицы.
17. Способ по п. 11, отличающийся тем, что в качестве двигателя используют электродвигатель.
18. Способ по п. 11, отличающийся тем, что формируют управляющие команды для двигателя при помощи платы управления.
19. Способ по п. 18, отличающийся тем, что формируют по крайней мере одну из следующих команд:
- команду на спуск зонда;
- команду на остановку зонда;
- команду на подъем зонда.
20. Способ по п. 11, отличающийся тем, что посылают сигналы на плату управления при помощи датчика жидкости с использованием беспроводной связи.
| Прибор для промывания газов | 1922 |
|
SU20A1 |

