Область техники, к которой относится изобретение
Изобретение относится к области электромеханики, в частности к электрическим машинам, ось ротора которых параллельна оси статора с движением по круговой траектории и может быть использовано в низкоскоростных электромеханических системах, в которых требуется высокий крутящий момент при компактных размерах и естественном воздушном охлаждении машины, например в области робототехники, ветроэнергетики и малой гидроэнергетики.
Уровень техники
Известен электродвигатель с катящимся «облегчённым» ротором (Бертинов А. И., Варлей В. В. Электрические машины с катящимся ротором. Москва: Энергия, 1969. 200 с.), содержащий статор в виде полого цилиндрического магнитопровода с пазами, в которые уложена обмотка. Эксцентрично статору расположен ротор, представляющий собой цилиндрический магнитопровод. Ротор имеет возможность обкатываться внутри статора, совершая сложное движение - поступательное круговое движение вокруг оси статора и вращательное вокруг собственной оси. Неотъемлемой частью такого двигателя является планетарный механизм, позволяющий преобразовывать быстроходное движение ротора под действием электромагнитного момента в тихоходное с кратным повышением крутящего момента.
Недостатком данного технического решения является низкая надёжность, а также повышенные габариты конструкции.
Известна циклоидальная магнитная передача (патент US № 10715025 B2, публ. 14.07.2020, МПК H02K 49/10, F16H 1/32), содержащая статор в виде полого цилиндрического магнитопровода, на внутренней поверхности которого расположены постоянные магниты. Эксцентрично статору расположен ротор, состоящий из цилиндрического магнитопровода, на внешней поверхности которого закреплены постоянные магниты, но с меньшим относительно статора числом пар полюсов. Ротор имеет возможность обкатываться по внутреннему диаметру статора, не соприкасаясь с ним, совершая сложное движение - поступательное круговое движение относительно оси статора и вращательное вокруг собственной оси.
Недостатком данного технического решения являются узкие функциональные возможности.
Наиболее близкой по технической сущности к предлагаемому изобретению является электрическая машина с интегрированным магнитным трансформатором момента (патент GB № 2437568 B, публ. 31.10.2007, МПК H02K 16/02), содержащая статор в виде полого цилиндра из магнитомягкого материала с пазами, в которые уложена обмотка, питаемая переменным напряжением и создающая вращающееся магнитное поле с pa парами полюсов, на внутренней поверхности статора установлены постоянные магниты с ps парами полюсов. Концентрично статору расположен ротор, состоящий из полого цилиндрического магнитопровода ротора, на поверхности которого закреплены постоянные магниты ротора с pr парами полюсов, причём pr = pa. Концентрично статору и внутреннему ротору в пространстве между ними расположен промежуточный ротор, состоящий из сегментов из магнитомягкого материала, число которых равно Nz = pr + ps. Передаточное отношение прототипа определяется как
i = Nz / pr
Недостатками данного технического решения являются низкое передаточное отношение, а также низкие технологичность и прочность конструкции вследствие того, что структура промежуточного ротора имеет сложную и нестандартную для электротехнической промышленности конструкцию, а постоянные магниты статора расположены близко к обмотке, что увеличивает риск их размагничивания при коротких замыканиях.
Раскрытие сущности изобретения
Технической задачей предлагаемого изобретения является реализация эксцентричной топологии трансформатора момента.
Технический результат заключается в увеличении передаточного отношения и удельного момента электрической машины при улучшении технологичности и прочности конструкции его магнитной системы.
Это достигается тем, что в известной электрической машине, содержащей статор в виде полого цилиндра с осью O1 и пазами, в которые уложена обмотка с числом пар полюсов pa, ротор в виде полого цилиндра, расположенный концентрично статору и имеющий постоянные магниты с числом пар полюсов pr, и промежуточный ротор, промежуточный ротор выполнен как транслятор в виде полого цилиндра, установленного с эксцентриситетом относительно оси O1 с возможностью кругового поступательного движения вокруг неё за счет эксцентриковой опоры, выполненной в виде эксцентрика, расположенного между статором и транслятором, с установленными на его концах подшипником статора и подшипником транслятора, на поверхности транслятора закреплены постоянные магниты с числом пар полюсов pt. При этом, при внешнем расположении статора постоянные магниты установлены на внешней поверхности ротора и охвачены транслятором с установленными на его внутренней поверхности постоянными магнитами транслятора, статор со своей обмоткой установлен с внешней стороны транслятора. Размеры транслятора и ротора находятся в соотношении rro / pr ≈ rti / pt , где rro - внешний радиус ротора, rti - внутренний радиус транслятора, расстояние между осями O1 и O2 выбрано согласно выражению e = rti - rro - δmin.i, где δmin.i - минимальное значение внешнего воздушного зазора между статором и транслятором, размер статора выбран, как rsi = rto + e + δmin.o, числа пар полюсов транслятора и ротора удовлетворяют условию pt - pr = 1, 2, 3 … n, , где n в общем случае любое целое число. При внутреннем расположении статора, статор с его обмоткой охвачен транслятором, на внешней поверхности которого расположены постоянные магниты транслятора, ротор с уставленными на его внутренней поверхности постоянными магнитами расположен с внешней стороны транслятора. Размеры транслятора и ротора находятся в соотношении rri / pr ≈ rto / pt, где rri - внутренний радиус ротора, rto - внешний радиус транслятора, расстояние между осями O1 и O2 выбрано согласно выражению e = rri - rto - δmin.o, где δmin.o - минимальное значение внутреннего воздушного зазора между статором и транслятором, размер статора выбран как rso = rti - e - δmin.o, числа пар полюсов транслятора и ротора удовлетворяют условию pr - pt = 1, 2, 3 … n, где n в общем случае любое целое число.
Краткое описание чертежей
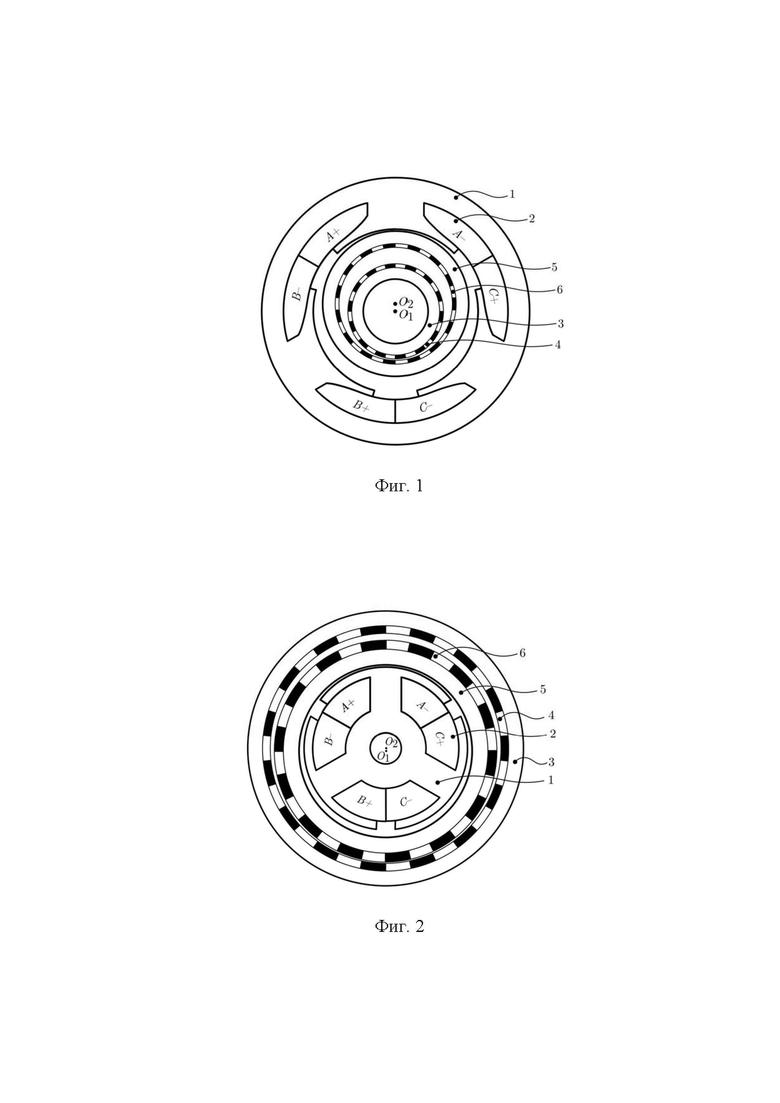
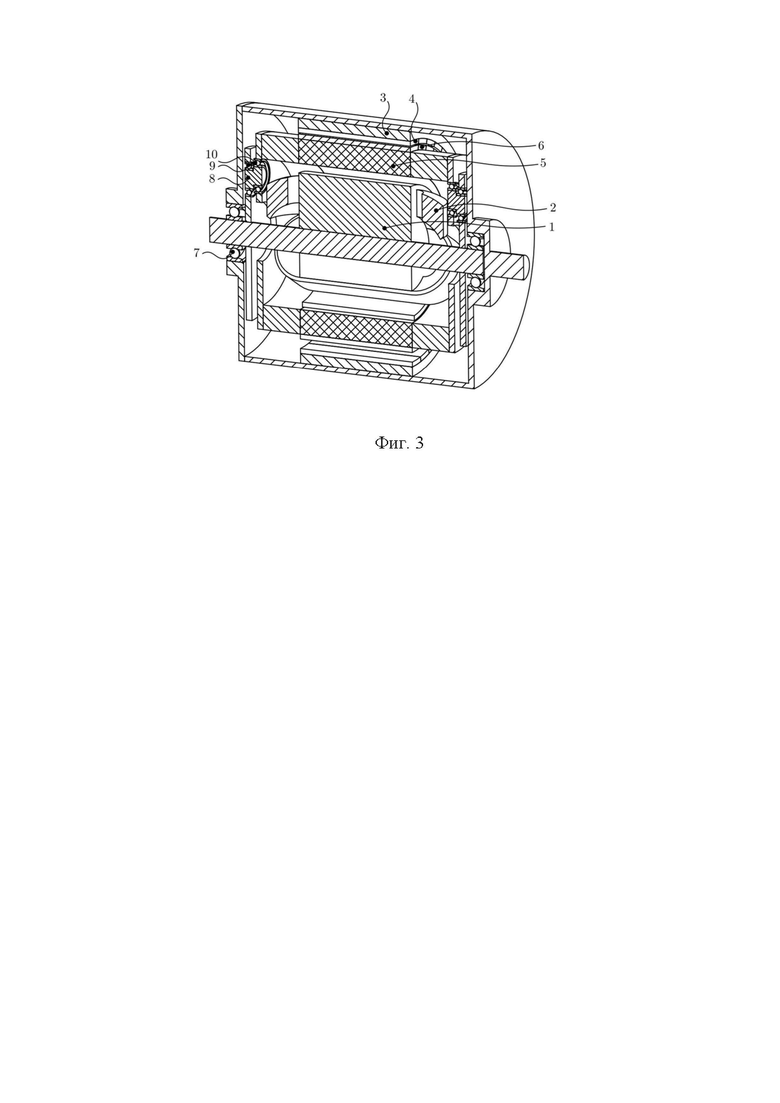
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена принципиальная схема варианта электрической машины с интегрированным магнитным трансформатором момента с внешним расположением статора, на фиг. 2 представлена принципиальная схема варианта электрической машины с интегрированным магнитным трансформатором момента с внутренним расположением статора, на фиг. 3 изображен общий вид трёхмерной модели электрической машины с интегрированным магнитным трансформатором момента с внутренним расположением статора.
Осуществление изобретения
Электрическая машина с интегрированным магнитным трансформатором момента содержит статор 1 в виде полого цилиндра из магнитомягкого материала, ось которого обозначена как O1. Статор 1 выполнен с пазами в количестве Z, в которые уложена N-фазная обмотка 2 c числом пар полюсов pa для создания вращающегося магнитного поля с питанием от источника переменного напряжения частотой f. Концентрично статору 1 расположен ротор 3 в виде полого цилиндра из магнитомягкого материала с установленными на него постоянными магнитами 4 с числом пар полюсов pr. Между статором 1 и ротором 2 c эксцентриситетом относительно основной оси O1 расположен транслятор 5 в виде полого цилиндра из магнитомягкого материала, ось которого обозначена как O2. На поверхности транслятора 5 закреплены постоянные магниты транслятора 6 с числом пар полюсов pt.
В электрической машине с интегрированным магнитным трансформатором момента (фиг. 1) постоянные магниты 4 установлены на внешней поверхности ротора 3 и охвачены транслятором 5 с установленными на его внутренней поверхности постоянными магнитами транслятора 6. Статор 1 со своей обмоткой 2 установлен с внешней стороны транслятора 6. Таким образом, данная компоновка представляет собой конструкцию с внешним расположением статора.
В электрической машине с интегрированным магнитным трансформатором момента (фиг. 2) статор 1 с его обмоткой 2 охвачен транслятором 5, на внешней поверхности которого расположены постоянные магниты транслятора 6. Ротор 3 с установленными на его внутренней поверхности постоянными магнитами 4 расположен с внешней стороны транслятора 5. Таким образом, данная компоновка представляет собой конструкцию с внутренним расположением статора.
Число пар полюсов обмотки 2 pa и количество зубцов Z в общем случае может быть любым целым числом, наилучшие результаты при трёхфазном (N = 3) питании достигаются при pa = 1 и Z = 3 для обоих вариантов расположения статора относительно транслятора).
При внешнем расположении статора полюсные деления транслятора 5 и ротора 3 выполнены близкими по значению. Таким образом, между внутренним радиусом транслятора 5 и внешним радиусом ротора 3 выполняется соотношение
rro / pr ≈ rti / pt,
где rro - внешний радиус ротора 3; rti - внутренний радиус транслятора 5.
Расстояние между осями O1 и O2, называемое эксцентриситет e выбирается из геометрических соображений согласно выражению
e = rti - rro - δmin.i,
где δmin.i - минимальное значение внутреннего воздушного зазора между ротором 3 и транслятором 5 - выбирается произвольно, желательно минимально возможным по технологическим соображениям.
По геометрическим соображениям внутренний радиус статора определяется как
rsi = rto + e +δmin.o,
где rto - внешний радиус транслятора 5 выбирается произвольно по результатам расчёта магнитной системы; δmin.o - минимальное значение внешнего воздушного зазора между статором 1 и транслятором 5 выбирается произвольно, но желательно минимально возможным по технологическим соображениям.
Числа пар полюсов транслятора 1 и ротора 3 удовлетворяют условию
pt - pr = 1, 2, 3 … n,
где n - в общем случае любое целое число (наилучшие результаты достигаются при минимально возможном по технологическим соображениям n).
При внутреннем расположении статора полюсное деление транслятора 5 и ротора 3 выполнены близкими по значению. Для обеспечения этого требования между внешним радиусом транслятора 5 и внутренним радиусом ротора 3 выполняется соотношение
rri / pr ≈ rto / pt,
где rri - внутренний радиус ротора 3; rto - внешний радиус транслятора 5.
Эксцентриситет e выбирается из геометрических соображений согласно выражению
e = rri - rto - δmin.o,
где δmin.o - минимальное значение внешнего воздушного зазора между статором 1 и транслятором 5 выбирается произвольно, но желательно минимально возможным по технологическим соображениям.
По геометрическим соображениям внешний радиус статора 1 определяется как
rso = rti - e - δmin.o,
где rti - внутренний радиус транслятора 5 выбирается произвольно по результатам расчёта магнитной системы; δmin.i - минимальное значение внутреннего воздушного зазора между ротором 3 и транслятором 5 выбирается произвольно, но желательно минимально возможным по технологическим соображениям.
Числа пар полюсов транслятора 1 и ротора 3 удовлетворяют условию
pr - pt = 1, 2, 3 … n,
где n - любое целое число (наилучшие результаты достигаются при минимально возможном по технологическим соображениям n).
Ротор 4 закреплён с возможностью вращения только вокруг главной оси O1, для чего установлена подшипниковая опора 7, а транслятор 5 закреплён с возможностью поступательного кругового движения вокруг главной оси O1, что обеспечивается при помощи минимум двух опор на каждом из торцов, каждая из которых содержит эксцентрик 8 с подшипником статора 9 и подшипником транслятора 10. В отличие от электрической машины с катящимся ротором, такая опора транслятора блокирует его вращение относительно оси O2.
Число пар полюсов обмотки pa статора 1 не связано с числом пар полюсов постоянных магнитов 4 ротора 3 pr и может быть выбрано произвольно (наилучшие результаты достигаются при pr = 1 и числе пар полюсов на полюс и фазу 0,5).
Электрическая машина с интегрированным трансформатором момента работает следующим образом.
На обмотку 2 подаётся переменное напряжение, за счёт чего по ней протекают токи, создающие вращающееся магнитное поле, которое создает реактивный электромагнитный момент Mt, действующий на транслятор 5 со стороны, свободной от постоянных магнитов 6. Под действием электромагнитного момента и в связи с отмеченными особенностями крепления транслятора 5, он начинает совершать поступательное круговое движение относительно главной оси. Минимальный воздушный зазор вращается с двойной синхронной скоростью, об/мин:
nδ = 2⋅60⋅f /pa
Это движение транслятора 5 является быстроходным, как следствие момент Mt относительно мал.
Постоянные магниты 6 двигаются вместе с транслятором 5 и взаимодействуют с постоянными магнитами 4 ротора 3, за счёт чего ротор 3 начинает вращаться вокруг главной оси с частотой в передаточное число раз меньшей, чем nδ, где передаточное число определяется как
i = pt / (pr - pt)
Таким образом, частота вращения ротора 3 будет равна
nr = 2⋅60⋅f ⋅ ( pr - pt ) / pt ps
Таким образом, момент транслятора, передаваясь на ротор, кратно увеличивается в i раз, что и представляет собой встроенный трансформатор момента. На практике этот эффект может значительно увеличивать удельный момент машины, так как передаточное число i может быть в диапазоне 20-100 в зависимости от диаметра машины.
Преимуществами данного технического решения является улучшение технологичности за счёт того, что сложная конструкция внешнего ротора-модулятора прототипа заменяется на полый цилиндрический магнитопровод транслятора 5 с постоянными магнитами 6. Это упрощает процесс изготовления устройства и позволяет обеспечить надлежащую механическую прочность. За счёт отсутствия магнитомягких сегментов уменьшаются потоки рассеяния, что позволяет увеличить естественное передаточное отношение вплоть до 20-100 в одной ступени, что до 5 раз больше, чем в прототипе.
Использование изобретения позволяет создавать электрические машины с высоким удельным моментом и КПД, а также улучшить технологичность и прочность конструкции относительно прототипа, что положительно скажется на эксплуатационных показателях редукторных электромеханических систем прямого привода. Расположение постоянных магнитов на трансляторе позволяет их экранировать, тем самым увеличив стойкость машины к размагничиванию в аварийных режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитная передача с катящимся ротором | 2021 |
|
RU2768365C1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| Многополюсный ротор электрической машины | 1988 |
|
SU1541720A1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2015 |
|
RU2585279C1 |
| Магнитоэлектрическая машина | 2016 |
|
RU2660945C2 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829315C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829312C1 |
| Многофазный мотор-генератор с магнитным ротором | 2015 |
|
RU2609524C1 |
| Асинхронно-синхронный преобразователь частоты | 1974 |
|
SU692017A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2018 |
|
RU2700179C1 |
Изобретение относится к области электротехники. Технический результат заключается в увеличении передаточного отношения и удельного момента электрической машины при улучшении технологичности и прочности конструкции его магнитной системы. Электрическая машина с интегрированным трансформатором момента содержит статор в виде полого цилиндра с осью O1 и пазами, в которые уложена обмотка с числом пар полюсов pa. Ротор выполнен в виде полого цилиндра и расположен концентрично статору. На роторе размещены постоянные магниты с числом пар полюсов pr. Для достижения технического результата электрическая машина содержит также промежуточный ротор, выполненный как транслятор в виде полого цилиндра, установленного с эксцентриситетом относительно оси O1 с возможностью кругового поступательного движения вокруг неё за счет эксцентриковой опоры, выполненной в виде экcцентрика, расположенного между статором и транслятором, с установленными на его концах подшипником статора и подшипником транслятора. На поверхности транслятора закреплены постоянные магниты с числом пар полюсов pt. Предусмотрено как внешнее, так и внутреннее расположение статора. 4 з.п. ф-лы, 3 ил.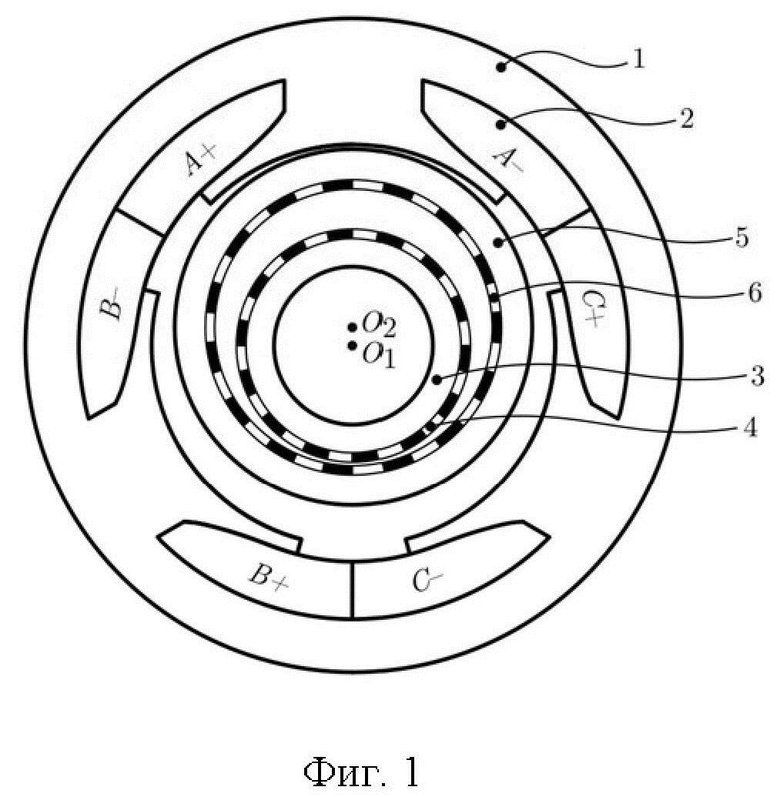
1. Электрическая машина с интегрированным трансформатором момента, содержащая статор в виде полого цилиндра с осью O1 и пазами, в которые уложена обмотка с числом пар полюсов pa, ротор в виде полого цилиндра, расположенный концентрично статору и имеющий постоянные магниты с числом пар полюсов pr, промежуточный ротор, отличающаяся тем, что промежуточный ротор выполнен как транслятор в виде полого цилиндра, установленного с эксцентриситетом относительно оси O1 с возможностью кругового поступательного движения вокруг неё за счет эксцентриковой опоры, выполненной в виде экcцентрика, расположенного между статором и транслятором, с установленными на его концах подшипником статора и подшипником транслятора, на поверхности транслятора закреплены постоянные магниты с числом пар полюсов pt.
2. Электрическая машина по п. 1, отличающаяся тем, что постоянные магниты установлены на внешней поверхности ротора и охвачены транслятором с установленными на его внутренней поверхности постоянными магнитами транслятора, статор со своей обмоткой установлен с внешней стороны транслятора.
3. Электрическая машина по п. 1, отличающаяся тем, что статор с его обмоткой охвачен транслятором, на внешней поверхности которого расположены постоянные магниты транслятора, ротор с уставленными на его внутренней поверхности постоянными магнитами расположен с внешней стороны транслятора.
4. Электрическая машина по любому из пп. 1, 2, отличающаяся тем, что размеры транслятора и ротора находятся в соотношении rro / pr ≈ rti / pt , где rro - внешний радиус ротора, rti - внутренний радиус транслятора, расстояние между осями O1 и O2 выбрано согласно выражению e = rti – rro – δmin.i, где δmin.i - минимальное значение внешнего воздушного зазора между статором и транслятором, размер статора выбран, как rsi = rto + e + δmin.o, числа пар полюсов транслятора и ротора удовлетворяют условию pt – pr = 1, 2, 3 … n, , где n в общем случае любое целое число.
5. Электрическая машина по любому из пп. 1, 3, отличающаяся тем, что размеры транслятора и ротора находятся в соотношении rri / pr ≈ rto / pt, где rri - внутренний радиус ротора, rto - внешний радиус транслятора, расстояние между осями O1 и O2 выбрано согласно выражению e = rri - rto - δmin.o, где δmin.o - минимальное значение внутреннего воздушного зазора между статором и транслятором, размер статора выбран как rso = rti - e - δmin.o, числа пар полюсов транслятора и ротора удовлетворяют условию pr – pt = 1, 2, 3 … n, где n в общем случае любое целое число.
| СПОСОБ ПОЛУЧЕНИЯ ПРЯНОЙ СМЕСИ, А ТАКЖЕ ПРИМЕНЕНИЕ ПРЯНОЙ СМЕСИ | 2009 |
|
RU2437568C1 |
| US 10715025 B2, 14.07.2020 | |||
| Электромагнитная передача с катящимся ротором | 2021 |
|
RU2768365C1 |
| Электромеханический преобразователь | 1984 |
|
SU1361683A1 |
| СООСНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2579443C2 |

