Изобретение относится к электротехнике, а именно к электрическим машинам с магнитными системами на постоянных магнитах, и может быть использовано в компактных энергетических установках, двигателях систем электродвижения морских судов, подводных лодок с уникальными виброшумовыми характеристиками, компактных энергетических системах постоянного тока.
Известен электромеханический преобразователь [1] (магнитоэлектрический генератор), выполненный в виде внутренних и внешних блоков роторов и статоров. Блок внутренних и внешних роторов выполнен с коллекторами, в торце которых выполнены съемные вкладыши для замены их щеток и пружин, установленных в гнездах статоров блока внутренних и внешних статоров для вращения блока роторов. При этом генератор выполнен с вакуумным кожухом, а под обмотками роторов и статоров в их блоках выполнены продольные полости для охлаждения обмоток посредством создания вакуума.
Известны [2, 4] электрические машины с магнитными системами, содержащими роторы, как с радиально, так и тангенциально намагниченными магнитами.
Все они, в том числе и электромеханический преобразователь [1], обладают одним общим недостатком: их магнитные системы создают относительно малую магнитную индукцию в зазоре ротор-статор (около 1 Тл), что не позволяет повысить удельную мощность на единицу объема электромеханического преобразователя.
Наиболее близким к предлагаемому изобретению является синхронная электрическая машина [3] - генератор с магнитной системой на постоянных магнитах, ротор которог содержит немагнитный вал, немагнитную втулку, постоянные магниты, магнитомягкие полюсы и бандажное кольцо, состоящее из немагнитных участков и магнитопроводящих участков.
Индукция в воздушном зазоре этого генератора составляет всего 0,65 Тл, т.к. его индуктор обладает значительными потоками рассеяния.
Целью изобретения является повышение в несколько раз удельной мощности на единицу объема электромеханического преобразователя с одновременным уменьшением пульсаций вращающего момента. Указанная цель в предлагаемом изобретении достигается тем, что (в скобках указаны позиционные обозначения на фигурах 1-5):
1. Модульный вентильный электромеханический преобразователь (МВЭП), содержащий n концентрических полых цилиндрических статоров (1) (далее - статоров) с расположенными на их внешних электрически изолированных цилиндрических боковых поверхностях n m-фазными обмотками (2), n концентрических полых цилиндрических роторов (3) (далее - роторов), установленных одним из своих оснований на внутреннюю торцевую поверхность несущего диска (4), соединенного с валом (5), установленным в подшипниках (6), один из которых размещен в корпусе (7) электромеханического преобразователя, датчик положения ротора (8), механически связанный с валом, а также магниты (9), расположенные со стороны внутренних цилиндрических боковых поверхностей роторов, образующие n тангенциальных магнитных систем, расположенных с радиальными зазорами (10) над m-фазными обмотками статоров, отличающийся тем, что каждая из n тангенциальных магнитных систем состоит из pn параметрических стабилизаторов магнитной индукции в зазоре между ротором и статором, установленных на внутренней поверхности ротора через немагнитный ложемент (11) и размещенных последовательно вдоль окружности ротора друг к другу одноименными полюсами, образующими полюсы тангенциальной магнитной системы, и имеет на статоре общий цилиндрический магнитопровод (12), при этом каждый из параметрических стабилизаторов выполнен в виде тангенциально намагниченной прямоугольной призмы магнита с двумя плотно примыкающими к ее разноименно намагниченным поверхностям полюсными наконечниками (14), (13) симметричной формы из шихтованного магнитомягкого материала, такого же, как и общий цилиндрический магнитопровод.
2. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что для повышения магнитной индукции и концентрации энергии в воздушных зазорах n тангенциальных магнитных систем с pn парами полюсов каждая между верхними основаниями призм магнитов параметрических стабилизаторов магнитной индукции введены воздушные зазоры (15), заполненные немагнитным материалом ложемента, причем форма этих зазоров в диаметральном поперечном сечении определяется формой полюсных наконечников.
3. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что соприкасающаяся с ложементом наружная криволинейная выпуклая поверхность первого полюсного наконечника, ограничивающая его объем от верхнего основания призмы, направленного к ложементу, до середины полюса тангенциальной магнитной системы, имеет в любом диаметральном поперечном сечении форму кривой (16), описываемую уравнением кубической параболы  , (τn - полюсная дуга, h - высота магнита) в прямоугольной системе координат (X, O, Y) с осью Y, параллельной радиусу и направленной в сторону вала, осью Х - в сторону от призмы, а началом координат О является проекция левого аксиального ребра верхнего основания призмы на координатную плоскость, проекция же правого аксиального ребра верхнего основания призмы является началом координат O1 для системы координат (X1, O1, Y1) второго полюсного наконечника, симметричной относительно радиуса, проходящего через геометрическую нейтраль призмы магнита.
, (τn - полюсная дуга, h - высота магнита) в прямоугольной системе координат (X, O, Y) с осью Y, параллельной радиусу и направленной в сторону вала, осью Х - в сторону от призмы, а началом координат О является проекция левого аксиального ребра верхнего основания призмы на координатную плоскость, проекция же правого аксиального ребра верхнего основания призмы является началом координат O1 для системы координат (X1, O1, Y1) второго полюсного наконечника, симметричной относительно радиуса, проходящего через геометрическую нейтраль призмы магнита.
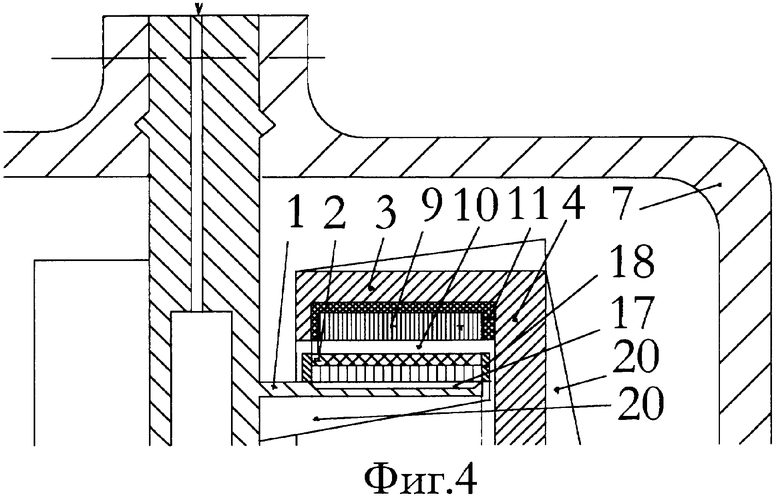
4. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что под общими цилиндрическими магнитопроводами каждого из n статоров расположены каналы системы охлаждения (17) для отвода тепловых потерь.
5. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что для обеспечения механического крепления и позиционирования m-фазных обмоток на торцевых поверхностях пакетов статоров прикреплены изоляционные щечки (18) с пазами, в которые уложены витки этих обмоток, изолированы и закреплены поверх изоляционного слоя на цилиндрических поверхностях пакетов статоров бандажами (19) из углеродистой нити, а затем пропитаны связующим компаундом, лобовые же части обмоток залиты электрически изолирующим теплопроводящим материалом для отвода тепловых потерь и обеспечения механического крепления.
6. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что наружная торцевая сторона несущего диска, наружные боковые поверхности роторов, внутренние боковые поверхности статоров снабжены ребрами жесткости (20), а объемы межреберного пространства заполнены шумопоглощающим материалом до образования на этих роторах, статорах и несущем диске поверхностей вращения.
7. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что введены модули n m-фазных инверторов (21), n двухрежимных (понижающих и повышающих) многофазных преобразователей (22), включенных по входам в диагонали управляемых выпрямителей и размещенных в секторах на одной наружной стороне соответственно первой (23) и второй (24) несущих полых тепловых плат с внутренними ребрами жесткости (25) и проточной системой охлаждения (26), причем секторы образованы радиально направленными наружными ребрами жесткости (27), являющимися одновременно электромагнитными экранами, а на другой наружной стороне первой (23) несущей полой тепловой платы, противолежащей несущему диску (4), установлены n концентрических полых цилиндрических статоров (1) и второй подшипник (6), причем корпус (7) электромеханического преобразователя, первая несущая полая тепловая плата (23), первый элемент (28) корпуса модульного электромеханического преобразователя, вторая (24) несущая полая тепловая плата, второй элемент корпуса (29) модульного электромеханического преобразователя, снабженные конусными посадочными элементами (30), последовательно собраны в указанном порядке, сцентрированы и соединены между собой элементами крепления (31).
8. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что выходы n m-фазных инверторов соединены с соответствующими n m-фазными обмотками через сквозные электрически изолированные соединители (32) в первой несущей полой тепловой плате аналогично соединению выходов n двухрежимных многофазных преобразователей с соответствующими питающими входами n m-фазных инверторов через сквозные электрически изолированные соединители во второй несущей полой тепловой плате, а управляющие входы n m-фазных инверторов соединены с выходом датчика положения ротора через n фазовых корректоров (33).
9. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что для уменьшения габаритов и увеличения надежности за счет разделения мощности n-го электромеханического преобразователя (35n) число pn секций одной фазы m-фазной обмотки n-го статора разделено на группы (361...36Pn/m), секции одноименных фаз в группах соединены последовательно, а m-фазные обмотки в группах снабжены собственными каналами управления.
10. Модульный вентильный электромеханический преобразователь по п.1, отличающийся тем, что для выравнивания ЭДС фаз введена аксиальная транспозиция секций фазы в группе, для выполнения которой число рn секций одной фазы m-фазной обмотки n-го статора должно быть кратно m - числу фаз, а число групп равно  .
.
Работа параметрического стабилизатора магнитной индукции.
1. Кривая намагничивания.
Рассмотрим кривую намагничивания магнитомягкого материала полюсных наконечников и магнитопровода. Магнитная проницаемость на крутом участке кривой намагничивания намного больше, чем на насыщенном. На этом участке обычно работают известные электромеханические преобразователи с постоянными магнитами с индукцией в воздушном зазоре 0,9÷1,0 Тл. Но так как энергия магнитного поля в воздушном зазоре пропорциональна квадрату магнитной индукции и объему воздушного зазора электромеханического преобразователя, т.е.  , то выгодно выбирать рабочую точку материала полюсных наконечников на насыщенном участке кривой намагничивания со значениями, индукции 2,1÷2,3 Тл, обеспечив тем самым примерно такую же индукцию в воздушном зазоре под полюсом. Это увеличивает энергию воздушного зазора в 4,4÷5,3 раза, а соответственно удельную мощность всего электромеханического преобразователя, что и является основной целью настоящего изобретения. Это достигается формой полюсных наконечников,
, то выгодно выбирать рабочую точку материала полюсных наконечников на насыщенном участке кривой намагничивания со значениями, индукции 2,1÷2,3 Тл, обеспечив тем самым примерно такую же индукцию в воздушном зазоре под полюсом. Это увеличивает энергию воздушного зазора в 4,4÷5,3 раза, а соответственно удельную мощность всего электромеханического преобразователя, что и является основной целью настоящего изобретения. Это достигается формой полюсных наконечников,
Форма полюсного наконечника решает только одну задачу: без потерь направить магнитный поток в зону электромеханического преобразования, что в настоящем изобретении обеспечивается формой внешнего контура полюсного наконечника в виде кубической параболы в его диаметральном сечении, которая имеет непрерывную производную по Х (во введенной системе координат), а следовательно, приводит к уменьшению рассеяния магнитного потока, так как известно, что любые разрывы производной кривой (например: резкие перегибы) внешнего контура полюсного наконечника приводят к рассеянию магнитного потока.
При этом вблизи воздушного зазора формируются насыщенные участки как в полюсном наконечнике, так и магнитопроводе на статоре, длины которых могут меняться в зависимости от размагничивающего действии поля якоря: технологических и температурных разбросов магнитных параметров магнита, материала полюсного наконечника и магнитопровода. Но за счет изменения положения рабочей точки на насыщенном участке кривой намагничивания материала полюсного наконечника и магнитопровода индукция в воздушном зазоре между ротором и статором параметрическим способом поддерживается постоянной.
Рассеяние магнитного потока при насыщении материала полюсного наконечника зависит от магнитной проницаемости, которая на участке насыщения значительно больше (в десятки раз), чем у воздуха, и может быть определена из кривой намагничивания. Следовательно, магнитное сопротивление насыщенного участка в десятки раз меньше, чем магнитное сопротивление немагнитной окружающей среды за пределами полюсного наконечника, и магнитный поток магнита будет замыкаться по пути наименьшего сопротивления, т.е. через насыщенный участок полюсного наконечника направится в зону электромеханического преобразования - в воздушный зазор.
Расчет магнитной системы параметрического стабилизатора производится так, чтобы при всех режимах работы электромеханического преобразователя, в том числе и при максимальных токах нагрузки, рабочая точка на кривой намагничивания оставалась на насыщенном участке кривой намагничивания.
Выбор рабочей точки на характеристике размагничивания магнита параметрического стабилизатора магнитной индукции можно считать правильным, если при воздействии вышеуказанных дестабилизирующих факторов (с учетом квадратичного увеличения энергии магнитного поля во внешней магнитной цепи при размагничивающем действии поля якоря) индукция в воздушном зазоре между ротором и статором остается постоянной в пределах точности, обеспечиваемой этим параметрическим стабилизатором магнитной индукции.
Технический эффект от внедрения предлагаемого изобретения состоит в создании для морских судов и подводных лодок номинального ряда электромеханических преобразователей с удельной мощностью на единицу объема и веса в несколько раз выше, чем у существующих, с малой осевой длиной, габаритными размерами и весом, со слабой реакцией магнитной системы на ток нагрузки и жесткой пропорциональностью вращающего момента току нагрузки, а также малыми пульсациями вращающего момента по углу поворота ротора, что позволяет обеспечивать уникальные виброшумовые характеристики подводных лодок.
На фигурах 1-5 не показана заливка лобовых частей m-фазных обмоток, а подшипники показаны условно, т.к. могут быть применены любые типы подшипников.
На фиг.1 показан аксиальный разрез МВЭП, на фиг.2 в диаметральном разрезе показан пример расположения n m-фазных инверторов.
На фиг.3 показан диаметральный разрез параметрического стабилизатора магнитной индукции в воздушном зазоре, а на фиг.4 - аксиальный разрез магнитной системы n-го электромеханического преобразователя.
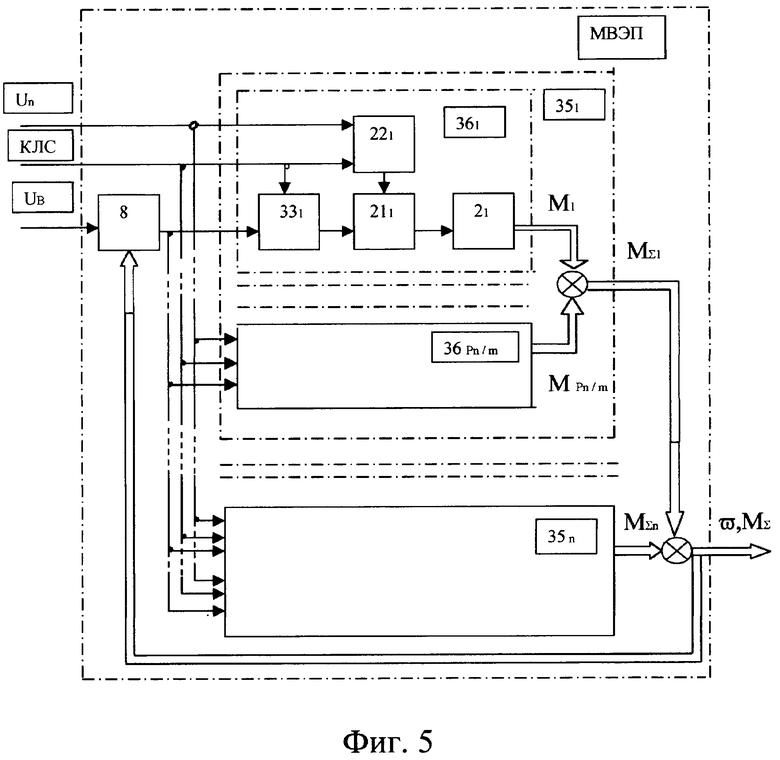
На фиг.5 показана структурная схема МВЭП, где M1,..., MPn/m - вращающие моменты m-фазных обмоток групп n-го электромеханического преобразователя, MΣ1,..., MΣn - вращающие моменты n-го электромеханического преобразователя, MΣ - вращающий момент на валу и  - частота вращения вала МВЭП, являющиеся функциями управляющих кодов, поступающих по КЛС - кодовой линии связи, например, с бортового компьютера, 8 - датчик положения ротора, Uв - напряжение возбуждения датчика положения ротора, Uп - напряжение источника питания МВЭП, 211 - m-фазный инвертор, основной функцией которого является преобразование напряжения постоянного тока в напряжение переменного тока для питания m-фазной обмотки 21, 221 - двухрежимный (понижающий и повышающий) многофазный преобразователь, включенный по входу в диагональ диодно-тиристорного управляемого выпрямителя. Его функцией является преобразование напряжения постоянного тока источника питания (в двигательном режиме работы МВЭП) в заданное кодом напряжение питания инвертора, а в генераторном режиме работы МВЭП - преобразование выпрямленной ЭДС m-фазной обмотки 21, в постоянный ток, пропорциональный требуемому моменту торможения (например, во время рекуперации кинетической энергии подвижного объекта в сеть или в СКН - систему конденсаторную накопительную); 331 - фазовый корректор, основной функцией которого является преобразование сигнала датчика положения ротора в n сигналов, управляющих n входами m-фазного инвертора 211, и обеспечение во всех режимах работы МВЭП необходимой фазовой настройки, 351 - номер электромеханического преобразователя, 361 - номер группы с собственным каналом управления, состоящим из m-фазного инвертора 211, 221 - двухрежимного (понижающего и повышающего) многофазного преобразователя, включенного по входу в диагональ диодно-тиристорного управляемого выпрямителя, 331 - фазового корректора.
- частота вращения вала МВЭП, являющиеся функциями управляющих кодов, поступающих по КЛС - кодовой линии связи, например, с бортового компьютера, 8 - датчик положения ротора, Uв - напряжение возбуждения датчика положения ротора, Uп - напряжение источника питания МВЭП, 211 - m-фазный инвертор, основной функцией которого является преобразование напряжения постоянного тока в напряжение переменного тока для питания m-фазной обмотки 21, 221 - двухрежимный (понижающий и повышающий) многофазный преобразователь, включенный по входу в диагональ диодно-тиристорного управляемого выпрямителя. Его функцией является преобразование напряжения постоянного тока источника питания (в двигательном режиме работы МВЭП) в заданное кодом напряжение питания инвертора, а в генераторном режиме работы МВЭП - преобразование выпрямленной ЭДС m-фазной обмотки 21, в постоянный ток, пропорциональный требуемому моменту торможения (например, во время рекуперации кинетической энергии подвижного объекта в сеть или в СКН - систему конденсаторную накопительную); 331 - фазовый корректор, основной функцией которого является преобразование сигнала датчика положения ротора в n сигналов, управляющих n входами m-фазного инвертора 211, и обеспечение во всех режимах работы МВЭП необходимой фазовой настройки, 351 - номер электромеханического преобразователя, 361 - номер группы с собственным каналом управления, состоящим из m-фазного инвертора 211, 221 - двухрежимного (понижающего и повышающего) многофазного преобразователя, включенного по входу в диагональ диодно-тиристорного управляемого выпрямителя, 331 - фазового корректора.
Источники информации
1. Патент РФ RU 2131164 С1, 6 Н02К 16/00, Н02К 19/16, Н02К 9/197.
Аналоги изобретения: ЕР 0495582 А2, 22.07.92. SU 677045 A, 30.07.79.
Брускин Д.Э. и др. Электрические машины, ч.1. - М.: Высшая школа, 1975, с.246- 247.
2. Патент РФ RU 2152116 С1, 7 Н02К 1/27, Н02К 21/14, Н02К 1/22.
Аналоги изобретения: Патент США N 4433261. SU 1788554 А, 21.04.1993.
SU 1245268 A3, 15.07.1986.
3. Н.П.Адволоткин, В.Т.Гращенков, Н.И.Лебедев и др. Управляемые бесконтактные двигатели постоянного тока. - Л.: Энергоатомиздат. Ленингр. отд-ние, 1984. - 160 с., ил., с.112.
4. В.Д.Косулин, Г.Б.Михайлов, В.В.Омельченко, В.В.Путников Вентильные электродвигатели малой мощности для промышленных роботов. - Л.: Энергоатомиздат, Ленингр. отд-ние, 1988, 184 с. ил., с.124.
5. Альтман А.Б., Герберг А.Н., Гладышев П.А. и др., Постоянные магниты. Справочник, под ред. Ю.М.Пятина, - 2-е изд., перераб. и доп. - M.: Энергия, 1980. - 488 с., ил., с.426.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2423272C2 |
| Вентильный электродвигатель | 1990 |
|
SU1791924A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ МАШИНА | 2001 |
|
RU2189685C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Вентильный электродвигатель | 1979 |
|
SU847452A1 |
| Бесконтактная синхронная машина | 2020 |
|
RU2759561C1 |
| БЕСКОНТАКТНАЯ СИНХРОННАЯ МАШИНА, ИМЕЮЩАЯ ГЛАДКИЙ ЯКОРЬ С БЕСПАЗОВОЙ АКТИВНОЙ ЗОНОЙ И ПОСТОЯННЫЕ МАГНИТЫ НА РОТОРЕ | 2008 |
|
RU2374743C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2356155C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2008 |
|
RU2375806C1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
Изобретение относится к области электротехники, а именно - к электрическим машинам с магнитными системами на постоянных магнитах, и может быть использовано в компактных энергетических установках, двигателях систем электродвижения морских судов, подводных лодок с уникальными виброшумовыми характеристиками, компактных энергетических системах постоянного тока. Технический эффект от внедрения предлагаемого изобретения состоит в создании для морских судов и подводных лодок номинального ряда электромеханических преобразователей с удельной мощностью на единицу объема и веса в несколько раз выше, чем у существующих, с малой осевой длиной, габаритными размерами и весом, со слабой реакцией магнитной системы на ток нагрузки и жесткой пропорциональностью вращающего момента току нагрузки, а также малыми пульсациями вращающего момента по углу поворота ротора, что позволяет обеспечивать уникальные виброшумовые характеристики подводных лодок. Сущность предлагаемого изобретения заключается в том, что в модульном вентильном электромеханическом преобразователе (МВЭП), содержащем n концентрических полых цилиндрических статоров (далее - статоров) с расположенными на их внешних электрически изолированных цилиндрических боковых поверхностях n m-фазными обмотками, n концентрических полых цилиндрических роторов (далее - роторов), установленных одним из своих оснований на внутреннюю торцевую поверхность несущего диска, соединенного с валом, установленным в подшипниках, один из которых размещен в корпусе электромеханического преобразователя, датчик положения ротора, механически связанный с валом, а также магниты, расположенные со стороны внутренних цилиндрических боковых поверхностей роторов, образующие n тангенциальных магнитных систем, расположенных с радиальными зазорами над m-фазными обмотками статоров, согласно изобретению каждая из n тангенциальных магнитных систем состоит из pn параметрических стабилизаторов магнитной индукции в зазоре между ротором и статором, установленных на внутренней поверхности ротора через немагнитный ложемент и размещенных последовательно вдоль окружности ротора друг к другу одноименными полюсами, образующими полюсы тангенциальной магнитной системы, и имеет на статоре общий цилиндрический магнитопровод, при этом каждый из параметрических стабилизаторов выполнен в виде тангенциально намагниченной прямоугольной призмы магнита с двумя плотно примыкающими к ее разноименно намагниченным поверхностям полюсными наконечниками симметричной формы из шихтованного магнитомягкого материала, такого же, как и общий цилиндрический магнитопровод. 9 з.п. ф-лы, 5 ил.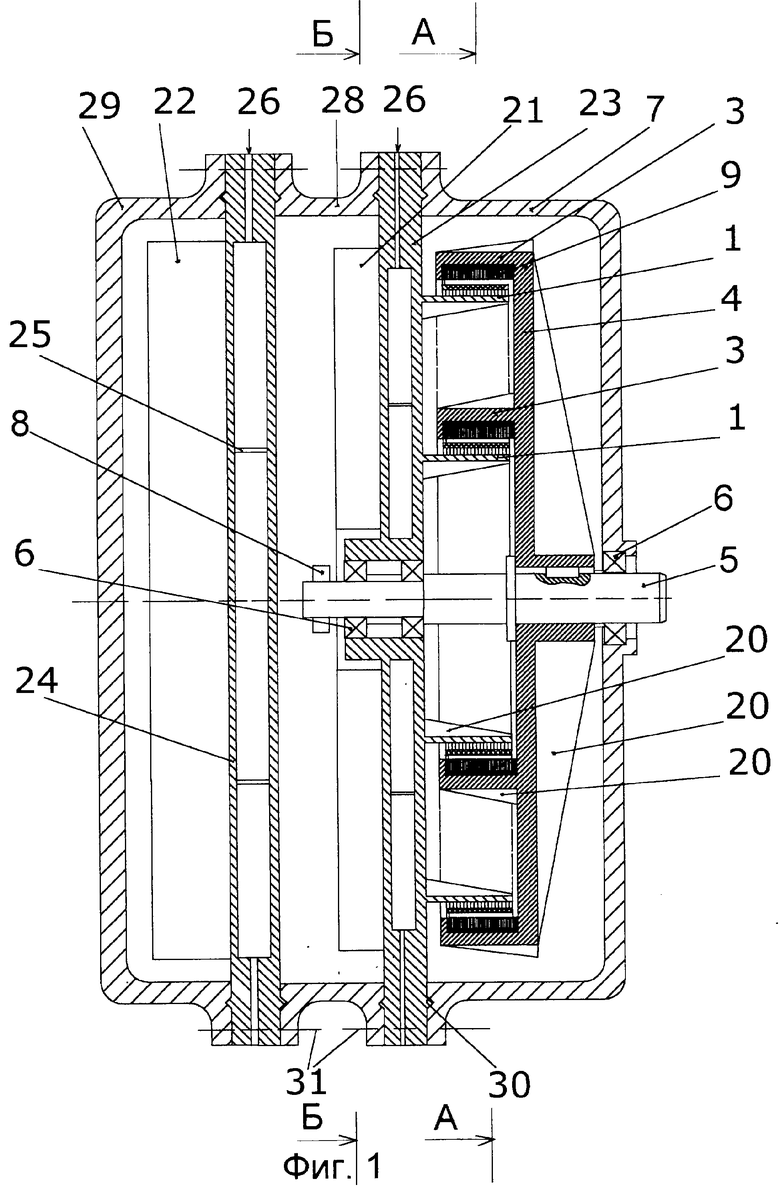
 , (τn - полюсная дуга, h - высота магнита) в прямоугольной системе координат (X, О, Y) с осью Y, параллельной радиусу и направленной в сторону вала, осью Х - в сторону от призмы, а началом координат О является проекция левого аксиального ребра верхнего основания призмы на координатную плоскость, проекция же правого аксиального ребра верхнего основания призмы является началом координат O1 для системы координат (X1, O1, Y1) второго полюсного наконечника, симметричной относительно радиуса, проходящего через геометрическую нейтраль призмы магнита.
, (τn - полюсная дуга, h - высота магнита) в прямоугольной системе координат (X, О, Y) с осью Y, параллельной радиусу и направленной в сторону вала, осью Х - в сторону от призмы, а началом координат О является проекция левого аксиального ребра верхнего основания призмы на координатную плоскость, проекция же правого аксиального ребра верхнего основания призмы является началом координат O1 для системы координат (X1, O1, Y1) второго полюсного наконечника, симметричной относительно радиуса, проходящего через геометрическую нейтраль призмы магнита. .
.
| АДВОЛОТКИН Н.П | |||
| ГРАЩЕНКОВ В.Т, ЛЕБЕДЕВ Н.И | |||
| и др | |||
| Управляемые бесконтактные двигатели постоянного тока | |||
| - Л.: Энергоатомиздат, 1984, с.112 | |||
| ГЕНЕРАТОР | 1997 |
|
RU2131164C1 |
| МНОГОПОЛЮСНАЯ МАГНИТНАЯ СИСТЕМА РОТОРА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1999 |
|
RU2152116C1 |
| Индуктор синхронной электрической машины | 1990 |
|
SU1788554A1 |
| Ротор электрической машины с возбуждением от постоянного магнита | 1983 |
|
SU1245268A3 |
| Бесконтактный синхронный генератор | 1977 |
|
SU677045A1 |
| US 4433261 A, 21.02.1992 | |||
| Способ испытания на усталостную прочность лопаток турбины | 1972 |
|
SU495582A1 |
| КОСУЛИН В.Д | |||
| и др. | |||

