Область техники
Изобретение относится к спорту, а именно к способам и устройствам для тренировки в различных видах единоборств, таких как бокс, карате и других, а также к тренировкам в других видах спортивной и игровой активности, в которых требуется выработка силы, скорости и точности ударов или бросков, а также улучшение скорости реакции.
Предшествующий уровень техники
Хорошо известны способы тренировок и устройства для отработки ударов в боксе и других видах спортивных единоборств и бросков метательных снарядов. При тренировках удары или броски наносятся по мишени, которая в подавляющем большинстве известных устройств находится в одном определенном положении, либо раскачивается после ударов тренирующегося. Наиболее распространенным видом мишени, раскачивающимся после нанесения ударов, являются боксерские мешки.
Основным недостатком известных устройств и способов тренировки ударов и бросков является низкий уровень интерактивности по сравнению с проведением тренировки с реальным партнером, что делает тренировки недостаточно эффективными. Так, тренировки в боксе с использованием боксерских мешков позволяют нарабатывать силу ударов, однако, из-за слабой обратной реакции на действия тренирующегося и практически полной предсказуемости положения мишени такие тренировки не позволяют эффективно тренировать скоростные качества спортсменов, более того, могут оказать на эти качества негативное воздействие.
Необходимо отметить также, что известные методики тренировок, проводящихся с реальным партнером, также имеют серьезные недостатки: прежде всего это невозможность проведения упражнений с нанесением ударов и бросков в полную силу из-за значительной вероятности получения при этом травм.
По этим причинам чрезвычайно актуальны новые способы и устройства интерактивных тренировок, эффективно имитирующих поведение реального партнера.
Известно, что для того, чтобы при проведении тренировок с устройствами придать упражнениям определенный уровень интерактивности применяют, как правило, один из двух технических приемов (по отдельности или в комбинации): а) снабжают мишень датчиками, регистрирующими нанесенные удары, информацию с которых делают доступной тренирующемуся спортсмену, б) тем или иным образом реализуют подвижность мишени.
Так, первый тип подобных устройств реализован в патенте США US 6110079, который описывает устройство для проведения тренировок в кикбоксинге, содержащее массивное основание и состоящую из набора секций мишень. Каждая секция мишени снабжена светодиодным индикатором. Также устройство снабжено сенсором удара и электронным блоком управления. Как описано в данном патенте, при выполнении упражнений электронный блок управления в соответствии заранее запрограммированной последовательностью включает один из светодиодных индикаторов, затем тренирующийся наносит удар в соответствующую секцию мишени, после чего блок управления включает следующий индикатор из запрограммированной последовательности. При этом для пользователя, имеющего высокий уровень подготовки, блок управления не включает следующий индикатор, пока не сработает датчик удара.
Предложенное в указанном патенте устройство и описанный метод тренировки обеспечивают определенный уровень интерактивности, однако имеют следующие недостатки. С одной стороны, это недостаточная вариативность в нанесении ударов - из-за ограниченного количества секций мишени. С другой стороны, поскольку отсутствует реальные перемещения мишени, соответствующие применяемым в единоборствах движениям партнера, например, уклоны, нырки, обманные движения, эффективность проведения тренировок при использовании этого устройства является недостаточной. Более того, эффективность тренировок с этим устройством при частом использовании может быть даже отрицательной, так как привыкание к реагированию на переключение ярких световых стимулов, взамен адекватного реагирования на изменения положения противника может оказать негативное влияние на подготовку спортсменов. Причиной негативного влияния может являться постепенное снижение уровня реакции на реальные перемещения противника.
Известно также устройство и метод тренировки, описанные в патенте США US 5330403, основанные на применении надувного боксерского мешка, вертикально установленного на основании с возможностью наклонов. Указанные наклоны боксерского мешка, в том числе его раскачивания из стороны в сторону, осуществляются за счет его соединения с основанием посредством цилиндрической пружины и происходят в результате нанесения спортсменом ударов. Придание подвижности боксерскому мешку при его взаимодействии со спортсменом, таким образом, создает определенную степень интерактивности тренировки, однако, движение боксерского мешка при этом имеет высокую степень предсказуемости для спортсмена. Происходит это вследствие применения механической пружины, поскольку нанесение ударов спортсменом - т.е. приложение вынуждающего усилия - приводит к движению боксерского мешка, имеющему характер затухающего колебания со стабильным периодом и монотонно убывающей амплитудой. Высокая предсказуемость положения боксерского мешка в каждый момент времени при таком характере его движения - принципиально отличном от характера движения реального партнера - является причиной недостаточной эффективности тренировок при использовании известного способа.
В патенте США US 7678029 описано устройство и метод тренировки, также основанные на применении надувного боксерского мешка, установленного на основании с возможностью наклонов через посредство цилиндрической пружины. В этом устройстве также дополнительно используется установленный в основании электродвигатель, ось которого расположена вертикально и механически соединена с указанной пружиной, на которой вертикально закреплен боксерский мешок. Также устройство оснащено датчиками удара, световыми и звуковыми индикаторами, установленными на боксерском мешке. Применение в описываемом устройстве датчиков и индикаторов удара, а также возможность вращения боксерского мешка относительно вертикальной оси увеличивает степень интерактивности тренировок, однако, применение механической пружины для осуществления колебательных движений боксерского мешка, по-прежнему, приводит к высокой предсказуемости движения боксерского мешка и является причиной недостаточной эффективности тренировок.
В патенте США US 7156760 описано устройство «подвижного вратаря», применяемого для создания игровой активности в таких видах спорта, как футбол или хоккей. В этом устройстве с помощью имеющегося двигателя производятся поступательные перемещения установленной на основании надувной фигуры вратаря вдоль трека, имеющего специальный паз. Целью таких перемещений фигуры вратаря является имитация действий «живого человека, отражающего гол». Основные недостатки описанного в этом патенте устройства и метода тренировки с ним следующие: во-первых, в описанном устройстве отсутствуют какие-либо средства, позволяющие определить позицию фигуры вратаря на треке и, следовательно, нет возможности однозначно обеспечить задание позиции фигуры вратаря; во-вторых, в устройстве отсутствует возможность какого-либо регулирования времени реакции «вратаря»; в-третьих, отсутствуют какие-либо средства, позволяющие определять отражение «вратарем» гола, т.е. попадание или, наоборот, непопадание в фигуру вратаря метательного снаряда (например, мяча или хоккейной шайбы), т.о. нет возможности каким-либо образом обеспечить обратную связь устройства с действиями тренирующегося спортсмена. Эти недостатки известного устройства не позволяют достаточно эффективно реализовать поставленную перед устройством задачу имитации действий реального вратаря и делают относительно низкой эффективность тренировок с использованием данного устройства.
Наиболее близким к заявляемому техническому решению по первому варианту способа тренировки является способ тренировки, используемый при работе с устройством, описанным в патенте США US 5803877. В этом техническом решении интерактивность тренировок основана на использовании комбинации движения мишени и применения датчика удара. В патенте описано устройство «программируемого спарринг-партнера», которое содержит основание, установленную на основании подвижную опору, на которой закреплен боксерский мешок, электрический привод, соединенный с подвижной опорой и обеспечивающий ее перемещение в вертикальном и горизонтальном направлении. Боксерский мешок имеет датчик удара, подключенный к панели управления устройством. Панель управления позволяет устанавливать уровень сложности тренировки путем установки определенной скорости движения подвижной опоры с боксерским мешком, а также обеспечивает пользователя информацией о количестве ударов и общем счете.
Предложенное устройство и описанный в патенте порядок выполнения упражнений в определенной степени позволяют имитировать тренировку с реальным партнером, однако, имеют существенные недостатки.
Во-первых, описанный порядок проведения тренировки, по которому боксерский мешок двигается с определенной скоростью, пользователь наносит удары и ему предъявляется результат в виде количества и силы попавших ударов, не обеспечивает достаточный уровень интерактивности и эффективности тренировок, поскольку в устройстве отсутствует возможность произвольного задания позиции мишени (боксерского мешка). Предусмотренной в устройстве возможности установки скорости движения боксерского мешка в горизонтальной плоскости крайне недостаточно для эффективной имитации движений партнера, так как наиболее важным для этого является возможность достаточно быстрого и четкого задания различных позиций мишени, например, установки мишени в основную (центральную) позицию, установки мишени в позиции, соответствующие уклонам партнера влево или вправо с заданной амплитудой уклонов, последующего возврата в основную (центральную) позицию и т.д. Отсутствие каких-либо технических средств для однозначного задания позиции мишени (боксерского мешка), таким образом, значительно уменьшает интерактивные возможности устройства и делает недостаточной эффективность тренировок.
Во-вторых, для имитации работы со спарринг-партнерами, обладающими различным уровнем скоростных качеств или различным стилем перемещений и ведения боя является важным также возможность регулирования перемещения мишени от позиции к позиции с различными динамическими характеристиками разгона и торможения. Такой возможности в описанном устройстве не предусмотрено, что также снижает уровень интерактивности и эффективность тренировок.
Bo-третьих, описанное устройство и метод тренировки не обеспечивает достаточное качество имитации движений реального партнера, поскольку движение подвижной опоры в горизонтальной плоскости производится исключительно вдоль определенного, механически заданного (с помощью паза определенной формы) пути. Таким образом, отсутствие возможности движения мишени в произвольную сторону также значительно снижает уровень интерактивности и эффективность тренировок.
Наиболее близким по технической сущности ко второму предлагаемому варианту способа тренировки является способ тренировки, используемый при работе с устройством, описанным в патенте США US 7479095. При использовании известного технического решения интерактивность тренировки достигается путем того, что с помощью имеющихся верхнего и нижнего сервоприводов осуществляют перемещения, а именно, наклоны, установленной на штанге мишени при дистанционном обнаружении приближающихся объектов, которое производят с помощью размещенных в мишени сенсоров дистанционного обнаружения и определения с помощью имеющегося блока управления позиций, направления движения и скорости таких объектов.
Недостатком описанного в известном патенте способа тренировок является их недостаточная эффективность по причине недостаточно точной имитации работы с реальным соперником, поскольку скорость реакции описанной системы на приближение внешних объектов, а именно, временной интервал между появлением движущихся в сторону мишени объектов и осуществлением мишенью движения, остается неизменной во время тренировки, в то время как работа с реальным соперником характеризуется различным временем его реакции. Такое различное время реакции обусловлено как различием природных качеств различных соперников, так и текущим изменением состояния соперника, в том числе время реакции в сильной степени зависит от уровня усталости и колебаний степени психологической концентрации во время тренировки или спортивного поединка. Также известно, что, в спортивных единоборствах, таких, как бокс, время реакции спортсмена может значительно увеличиваться после пропущенных им ударов соперника.
Наиболее близким к предлагаемому устройству для интерактивной тренировки по первому и второму вариантам также является устройство, описанное в патенте США US 7479095. Рассмотрим известное устройство более подробно. Это устройство содержит вертикально смонтированные нижний и верхний серводвигатели, вертикально расположенную штангу, имеющую закрепленную на ее верхнем конце мишень, и блок управления серводвигателями.
При этом вал нижнего серводвигателя направлен вертикально, а сверху на валу этого серводвигателя в горизонтальной плоскости расположена площадка, на которой закреплен верхний серводвигатель. Вал верхнего серводвигателя расположен в горизонтальной плоскости. Штанга с мишенью непосредственно механически соединена с валом верхнего сервопривода. Таким образом, нижний серводвигатель производит повороты вертикально расположенной штанги с мишенью относительно вертикальной оси, а верхний серводвигатель осуществляет наклоны штанги в стороны. Важной особенностью этого устройства является то, что внутри мишени расположены датчики, которые детектируют «положение, направление движения и скорость внешних объектов».
При тренировках с этим устройством пользователь бросает внешние объекты в мишень или наносит удары по мишени, датчики детектируют положение внешних объектов, направление их движения и скорость, затем блок управления через посредство серводвигателей перемещает мишень таким образом, чтобы избежать попадания внешних объектов в мишень.
Описанное устройство и порядок тренировки с ним потенциально имеют довольно высокий уровень интерактивности в силу того, что перед устройством ставится задача обеспечить поведение системы, похожее на поведение реального партнера.
Однако описанное устройство имеет следующие недостатки.
Во-первых, не обеспечивается достаточно высокий уровень интерактивности и эффективности тренировки в силу того, что отсутствуют какие-либо технические средства, обеспечивающие обратную связь с пользователем, основанную на результативности попаданий по мишени.
Во-вторых, в известном устройстве недостаточно точно имитируется работа с реальным партнером или соперником, т.к. предусматривается возможность движения мишени лишь в результате обнаружения движущихся внешних объектов и определения характеристик их движения. В то же время, при тренировках с реальным партнером большое значение имеют движения партнера, которые совершаются даже в отсутствие в течение какого-то времени реальных ударов соперника - т.н. обманные движения.
В-третьих, конструкция известного устройства не обеспечивает возможность перемещения мишени в произвольную позицию по наиболее короткой траектории. Используемое расположение серводвигателей и поворотной штанги и, в первую очередь, вертикальное положение вала нижнего сервопривода не позволяет в известном устройстве немедленно по команде блока управления начать движение мишени в произвольно заданную сторону. При поступлении команды от блока управления на движение мишени в определенную сторону в момент, когда подвижная штанга находится в строго вертикальном положении, вначале требуется поворот вала нижнего серводвигателя относительно вертикальной оси на определенный угол и только затем - наклон штанги с мишенью в нужную сторону с помощью верхнего серводвигателя. Если же команда от блока управления на движение мишени в определенную сторону поступит при произвольном положении подвижной штанги, то это может дополнительно потребовать вначале возврат штанги в вертикальное положение с помощью верхнего сервопривода, затем поворот вала нижнего серводвигателя на необходимый угол и последующий наклон штанги в нужную сторону с помощью верхнего серводвигателя. Это свойство известного устройства значительно замедляет перемещение мишени, существенно ограничивает возможности устройства и, тем самым, снижает уровень интерактивности тренировок.
В-четвертых, недостатком известного устройства, затрудняющим имитацию работы с реальным партнером и снижающим в результате этого эффективность тренировок, возникающим также из-за ключевых особенностей его конструкции, является то, что перемещение мишени в направлениях вперед-назад относительно тренирующегося неминуемо сопряжено с поворотом мишени боком к нему. Необходимость перемещения мишени в направлениях вперед-назад относительно тренирующегося при тренировках в единоборствах, в том числе, в боксе возникает при отработке боковых ударов (хуков). Для имитации защитных действий реального партнера при нанесении по мишени боковых ударов требуется отклонение мишени назад относительно тренирующегося. В известном же устройстве для такого перемещения мишени требуется предварительный поворот вала нижнего сервопривода на угол 90 град (или - 90 град) и лишь затем наклон подвижной штанги с помощью верхнего серводвигателя. Возникающий при этом разворот мишени боком к тренирующемуся может являться неприемлемым, как минимум, по двум причинам. Так, это неприемлемо для имитации движений реального партнера, если в мишень выполнена в виде фигуры, не имеющей осевой симметрии, например, в виде фигуры, имитирующей фигуру реального соперника. Кроме того, даже при осесимметричном выполнении мишени такие ее развороты относительно тренирующегося существенно затрудняют возможность применения каких-либо датчиков или, например, световых сигнализаторов, устанавливаемых на мишени. В том числе, весьма затруднительной является возможность использования датчиков, определяющих силу и направление ударов, наносимых по мишени (в известном устройстве такая возможность не отражена). Более того, в связи с описанными разворотами мишени весьма затруднительным также является использование описанных в известном устройстве установленных на мишени датчиков, задачей которых является заблаговременное детектирование движущихся объектов и определение характеристик их движения.
Раскрытие изобретения
Технический результат, на достижение которого направлено изобретение по первому варианту способа интерактивной тренировки, заключается в повышении эффективности тренировок путем более точной имитации работы с реальным партнером за счет увеличения степени непредсказуемости движения мишени для тренирующегося.
Указанный технический результат в части, относящейся к первому варианту способа, достигается тем, что в способе интерактивной тренировки, включающем:
нанесение спортсменом ударов по мишени или осуществление бросков метательным снарядом по мишени,
создание вынужденных колебаний мишени, путем приведения мишени в движение посредством, по крайней мере, одного привода,
определение попадания в мишень посредством, по крайней мере, одного сенсора, согласно изобретению вынужденные колебания мишени создают в виде последовательности вынужденных колебаний различных видов: периодического и/или затухающего и/или апериодического, при этом непосредственно во время тренировки производят регулирование характера колебаний мишени путем изменения параметров колебаний: периода и/или амплитуды и/или степени демпфирования и/или центрального положения, относительно которого создают колебания мишени.
Описанный вариант способа тренировки имеет несколько возможных уточнений и дополнений.
Так, он может быть дополнен тем, что указанные изменения вышеуказанных параметров колебаний мишени производят случайным или псевдослучайным образом, т.е. осуществляют рандомизацию колебаний мишени.
Также описанный способ тренировки может быть дополнен тем, что изменения вышеуказанных параметров колебаний мишени производят с учетом результатов определения попадания в мишень, а именно, при определении более частых попаданий по мишени уменьшают среднее значение периода колебаний и/или увеличивают средние значения амплитуды и/или величины изменения центрального положения, а при определении более редких попаданий по мишени, соответственно, увеличивают среднее значение периода колебаний и/или уменьшают средние значения амплитуды и/или величины изменения центрального положения.
Еще одним дополнением описанного варианта способа тренировки может являться то, что вынужденные колебания мишени в направлении влево-вправо и в направлении вперед-назад относительно тренирующегося осуществляют независимо, тем самым обеспечивают характер движения мишени как суперпозицию ее движения в этих направлениях и, за счет этого, обеспечивают возможность перемещения мишени в произвольном направлении и по произвольной траектории.
Описанный вариант способа тренировки может быть уточнен тем, что формирование последовательности вынужденных колебаний мишени и изменение их параметров осуществляют программно.
Также описанный вариант способа тренировки может быть уточнен тем, что управление формированием последовательности вынужденных колебаний мишени осуществляет партнер тренирующегося с помощью пульта, манипулятора или какого-либо устройства ввода.
Дополнением описанного варианта способа тренировки может также являться то, что формирование последовательности вынужденных колебаний мишени и изменение их параметров осуществляют путем имитации движения корпуса партнера тренирующегося, положение которого определяют с помощью датчиков.
Необходимо отметить, что если первый предлагаемый вариант способа тренировки основан на использовании движений мишени, имитирующих так называемые обманные движения соперника, которые далеко не всегда являются однозначным ответом на действия партнера (т.е. на попытки нанесения им ударов) и могут осуществляться в «инициативном порядке», то во втором предлагаемом варианте способа тренировки движение мишени осуществляется как ответ на приближение к мишени движущихся объектов, например, боксерских перчаток тренирующегося спортсмена.
Технический результат, на достижение которого направлено изобретение по второму варианту способа интерактивной тренировки, также заключается в повышении эффективности тренировок за счет более точной имитации работы с реальным соперником.
Указанный технический результат в части, относящейся ко второму варианту способа, достигается тем, что в способе интерактивной тренировки, включающем
нанесение спортсменом ударов по мишени или осуществление бросков метательным снарядом по мишени,
обнаружение движущихся в направлении мишени объектов с помощью имеющегося, по крайне мере, одного сенсора,
перемещение или наклоны мишени с помощью имеющегося, по крайней мере, одного привода,
в соответствии с изобретением производят установку сложности тренировки путем регулирования времени реакции системы посредством регулирования динамических характеристик перемещения мишени и/или временной задержки между обнаружением объекта, приближающегося к мишени, и началом перемещения мишени.
Описанный второй вариант предлагаемого способа тренировки также имеет несколько возможных уточнений и дополнений.
Так, этот вариант предлагаемого способа может быть уточнен тем, что при обнаружении движущихся в направлении мишени объектов осуществляют определение относительного положения движущихся объектов и мишени, при этом вышеуказанное перемещение мишени производят таким образом, что обеспечивается ее полное или частичное уклонение от движущихся объектов.
Другое уточнение рассматриваемого варианта предлагаемого способа состоит в том, что при обнаружении движущихся в направлении мишени объектов осуществляют расчет траектории движения этих объектов, при этом вышеуказанное перемещение мишени производят в сторону расчетной траектории движения объектов.
Также рассматриваемый вариант способа может быть дополнен том, что указанное регулирование времени реакции системы осуществляют случайным или псевдослучайным образом непосредственно во время тренировки, делая характер движения мишени более рандомизированным.
Еще одним дополнением рассматриваемого варианта способа интерактивной тренировки может являться то, что при вышеуказанном регулировании времени реакции системы осуществляют имитацию накопления усталости и/или восстановления сил соперником путем увеличения и/или, соответственно, уменьшения среднего значения времени реакции системы.
Необходимо отметить, что реализация предлагаемых вариантов способа интерактивной тренировки может быть осуществлена при использовании различных видов механического движения мишени. В том числе, может применяться поступательное движение мишени, вращательное движение мишени или комбинации вращательного и поступательного движения. По этой причине на основе предлагаемых вариантов способа тренировки может быть созданы разнообразные устройства, значительно различающиеся по своей конструкции и, в первую очередь, по конструкции механического привода, с помощью которого реализуется движение мишени.
Одним из наиболее простых в реализации видов движения мишени является вращательное движение мишени, осуществляемое при наклонах штанги, на одном из концов которой расположена мишень. Именно на такой реализации движения мишени основаны два варианта предлагаемого устройства для интерактивной тренировки, с помощью которых могут быть осуществлены предлагаемые способы интерактивной тренировки.
Технический результат, на достижение которого направлено изобретение в части, касающейся первого варианта устройства для интерактивной тренировки, заключается в повышении эффективности тренировок путем увеличения степени непредсказуемости движения мишени для тренирующегося, что обеспечивает более точную имитацию работы с реальным партнером.
Достижение указанного технического результата в первом варианте заявляемого устройства обеспечивается при использовании в приводе устройства для перемещения мишени как одного, так и двух или более двигателей, обеспечивающих при перемещении мишени одну, две или более степеней свободы.
Указанный технический результат в части, относящейся к первому варианту предлагаемого устройства, достигается тем, что устройство для интерактивной тренировки, содержащее:
основание,
установленный на основании двигатель,
подвижную штангу, механически связанную с валом двигателя, установленную с возможностью наклонов и имеющую закрепленную на одной из ее сторон мишень для нанесения ударов или осуществления бросков,
средство для определения положения мишени,
блок управления, подключенный к средству для определения положения мишени, а также к двигателю,
в соответствии с изобретением снабжено подключенными к блоку управления: средством детектирования ударов, произведенных по мишени, средством ввода режимов тренировки, в том числе задания ее сложности, средством отображения результатов тренировки,
при этом блок управления содержит модуль формирования задания по углу поворота подвижной штанги в виде последовательности сигналов периодического, затухающего или апериодического вида, выполненный с возможностью регулирования частоты следования таких сигналов, периода и амплитуды колебаний сигналов, скорости их затухания.
Устройство для интерактивной тренировки, выполненное по первому предлагаемому варианту, может иметь несколько дополнений.
Так, блок управления может быть дополнительно снабжен подключенным к выходу модуля формирования задания по углу поворота подвижной штанги пропорционально-интегрально-дифференцирующим (ПИД) регулятором, вход обратной связи которого подключен к средству определения положения мишени.
Также, блок управления устройства может быть дополнительно снабжен модулем регулирования динамических характеристик устройства, в том числе полосы пропускания и/или времени отклика цепи управления и/или диапазона значений ускорения и/или скорости вращательного движения штанги.
Устройство также может быть дополнительно снабжено средством детектирования движущихся в направлении мишени объектов, подключенным к дополнительному входу блока управления, при этом блок управления устройства выполнен таким образом, что осуществляется расчет относительного положения указанных объектов и мишени и производится формирование сигналов задания по углу поворота подвижной штанги, исходя из условия полного или частичного уклонения мишени от попадания в нее обнаруженных движущихся объектов путем установки различного времени реакции системы.
Устройство также может быть дополнительно снабжено средством детектирования движущихся в направлении мишени объектов, подключенным к дополнительному входу блока управления, при этом блок управления устройства выполнен таким образом, что осуществляется расчет траектории движения указанных объектов относительно мишени и производится формирование сигналов задания по углу поворота подвижной штанги, обеспечивающее перемещение мишени в сторону расчетной траектории объектов.
Устройство также может быть дополнено тем, что в нем обеспечивается возможность вертикального перемещения мишени путем того, что подвижная штанга выполнена из двух частей, имеющих возможность продольного перемещения относительно друг друга, при этом одна из частей штанги соединена с основанием, а на другой части штанги размещена мишень, на основании устройства установлен дополнительный двигатель, посредством механической передачи соединенный с частью штанги, на которой закреплена мишень, блок управления устройства имеет дополнительный модуль формирования последовательности сигналов задания по величине относительного перемещения двух частей подвижной штанги, а силовой модуль блока управления имеет дополнительный выход, подключенный к упомянутому дополнительному двигателю.
Также устройство может быть дополнено дискретным или аналоговым устройством ввода, выход которого подключен к дополнительному входу блока управления, при этом блок управления устройства обеспечивает формирование сигналов задания по углу поворота подвижной штанги с учетом положения органа управления устройство ввода.
Устройство может быть дополнительно снабжено средством для определения положения партнера тренирующегося или наклонов его корпуса, например, видеокамерой с соответствующим аппаратно-программным обеспечением, при этом блок управления выполнен таким образом, что обеспечивается формирование сигналов задания по углу поворота подвижной штанги с учетом положения партнера тренирующегося или наклонов его корпуса.
Второй вариант предлагаемого устройства для интерактивной тренировки основан на использовании в устройстве при осуществлении движения мишени двух или более двигателей.
Технический результат, на достижение которого направлено изобретение в части, касающейся второго варианта устройства для интерактивной тренировки, также заключается в повышении эффективности тренировок путем более точной имитации работы с реальным партнером.
Указанный технический результат в части, относящейся ко второму варианту предлагаемого устройства, достигается тем, что в устройстве для интерактивной тренировки, содержащем неподвижно установленный первый двигатель, подвижное основание, механически связанное с валом первого двигателя, установленный на подвижном основании второй двигатель, подвижную штангу, механически связанную с валом второго двигателя, установленную с возможностью наклонов и имеющую закрепленную на одной из ее сторон мишень для нанесения ударов или осуществления бросков, средство для определения положения мишени, блок управления, подключенный к средству для определения положения мишени, а также к первому и второму двигателю, в соответствии с изобретением вышеуказанное подвижное основание установлено на горизонтально или наклонно расположенной оси, при этом механическая связь подвижного основания и вала первого двигателя, а также механическая связь подвижной штанги и вала второго двигателя каждая осуществлена непосредственно или посредством механической передачи.
Устройство для интерактивной тренировки, выполненное по второму предлагаемому варианту, также может иметь несколько дополнений.
Так, устройство может быть дополнительно снабжено подключенными к блоку управления датчиком удара, установленным на мишени или подвижной штаге, средством ввода режимов тренировки, в том числе задания ее сложности, средством отображения результатов тренировки.
Также устройство может быть дополнено тем, что в нем дополнительно обеспечивается возможность вертикального перемещения мишени, путем того, что подвижная штанга выполнена из двух частей, установленных с возможностью продольного перемещения относительно друг друга, при этом одна из частей штанги механически связана с подвижным основанием, а мишень размещена на второй части подвижной штанги, на подвижном основании установлен дополнительный двигатель, вал которого посредством механической передачи связан с частью штанги, на которой закреплена мишень, а блок управления снабжен модулем управления вертикальным перемещением мишени, имеющим выход для подключения дополнительного двигателя.
Еще одним дополнением устройства может являться его оснащение подключенным к блоку управления средством детектирования движущихся в направлении мишени объектов, при этом блок управления выполнен таким образом, что производится расчет относительного положения указанных объектов и мишени, а управление движением мишени осуществляется таким образом, что обеспечивается полное или частичное уклонение мишени от попадания в нее обнаруженных движущихся объектов.
Также при оснащении блока управления устройства средством детектирования движущихся в направлении мишени объектов, блок управления устройства может быть выполнен таким образом, что производится определение направления вектора скорости движения объектов, классификация этого направления как прямого или бокового относительно текущего положения мишени, при этом при определении направления как бокового движение мишени осуществляется преимущественно назад относительно тренирующегося.
Еще одна возможность развития устройства при оснащении его блока управления средством детектирования движущихся в направлении мишени объектов заключается в том, что блок управления устройства может быть выполнен таким образом, что производится расчет траектории движения указанных объектов относительно мишени, а движение мишени осуществляется таким образом, что обеспечивается перемещение мишени в сторону расчетной траектории объектов.
Одним из дополнений предлагаемого устройства является то, что оно может быть дополнительно снабжено подключенным к блоку управления дискретным или аналоговым устройством ввода, при этом блок управления устройства выполнен таким образом, что при формировании сигналов управления первым и вторым двигателями, обеспечивается перемещение мишени с учетом положения органа управления устройства ввода.
Также одним из дополнений предлагаемого устройства является то, что оно может быть дополнительно снабжено подключенным к блоку управления средством для определения наклонов корпуса или положения партнера тренирующегося, при этом блок управления устройства выполнен таким образом, что при формировании сигналов управления первым и вторым двигателями, обеспечивается перемещение мишени с учетом наклонов корпуса и/или положения партнера тренирующегося.
Краткое описание чертежей
На фиг. 1 изображена схема первого варианта устройства для осуществления предлагаемых вариантов способа интерактивной тренировки.
На фиг. 2 изображена схема блока управления первого варианта устройства.
На фиг. 3 изображена схема блока управления первого варианта устройства с дополнениями.
На фиг. 4 и фиг. 5 изображены примеры диаграмм последовательностей вынужденных колебаний мишени, используемых при реализации первого варианта способа интерактивной тренировки.
На фиг. 6 изображены примеры диаграмм, иллюстрирующих, каким образом производится регулирование времени реакции устройства при осуществлении второго варианта способа интерактивной тренировки.
На фиг. 7 изображена схема второго варианта устройства для осуществления предлагаемых вариантов способа интерактивной тренировки.
На фиг. 8 изображена схема блока управления второго варианта предлагаемого устройства.
Возможные варианты осуществления изобретения
Рассмотрим возможную реализацию первого варианта устройства для осуществления предложенных вариантов способа интерактивной тренировки.
Устройство содержит основание 1 (фиг. 1), на котором установлены электродвигатель 2 и штанга 3, в верхней части которой закреплена мишень 4, выполненная, в данной реализации устройства в виде боксерского мешка. Штанга 3 соединена с основанием 1 через посредство оси 5, которая установлена на основании, например, с помощью подшипников (на схеме не показаны). Вал 6 электродвигателя 2 механически связан с подвижной штангой 3 посредством ременной передачи, состоящей из шкива 7, находящегося на валу 6 электродвигателя, приводного ремня 8 и шкива 9, находящегося на оси 5 подвижной штанги 3. Таким образом, изображенное на фиг. 1 расположение штанги 3 и электродвигателя 2 на основании 1 обеспечивает наклоны штанги 3 относительно ее вертикального положения при вращении вала 6 электродвигателя 2. Управление устройством, изображенным на фиг. 1, осуществляется с помощью целого ряда средств. Так, в состав устройства входит средство для определения положения мишени, которым в данной реализации является датчик угла поворота (энкодер) 10, вал которого механически связан с осью 5, который определяет угол поворота штанги 3 и подключен к блоку управления 11 устройства. В состав устройства также входят средство 12 детектирования ударов, произведенных по мишени, также подключенное к блоку управления 11. Таким средством может являться установленный на мишени датчик различных типов, например, тензодатчик или акселерометр. Также в состав устройства в данной реализации входят подключенные к блоку управления 11 средство ввода режимов тренировки 13, выполненное, например, в виде клавиатуры, а также средство для отображения результатов тренировки 14, выполненное в виде дисплея, и средство для воспроизведения звука 15. Кроме отображения результатов тренировки дисплей 14 может также использоваться в устройстве для отображения текущих режимов тренировки, заданий пользователю, текущих показателей тренировки, например, количества попавших по мишени ударов и их силы, времени тренировки и других параметров. Устройство для воспроизведения звука 15 может использоваться для голосовых подсказок пользователю, например, для озвучивания текущих заданий, силы достигших цели ударов.
Рассмотрим подробнее состав блока управления 11 устройства. Этот блок содержит модуль управления программой тренировки 16 (фиг. 2), к которому подключены средство 12 детектирования ударов, а также средство ввода 13, дисплей 14 и средство для воспроизведения звука 15. Выход модуля 16 управления программой тренировки подключен ко входу модуля 17 формирования задания по углу поворота подвижной штанги 3, выход которого подключен ко входу пропорционально-интегрально-дифференциального регулятора (ПИД-регулятора) 18. На вход обратной связи ПИД-регулятора 18 подается сигнал датчика угла поворота (энкодера) 10.
Использование в устройстве ПИД-регулятора не является обязательным, однако, его наличие позволяет, как известно для систем управления с обратной связью, при оптимальных настройках регулятора значительно улучшить переходные характеристики системы управления и за счет этого позволяет максимально приблизить характер движения объекта, т.е. подвижной штанги 3 и закрепленной на ней мишени 4, к форме сигнала управления.
Выход ПИД-регулятора 18 подключен к входу силового модуля 19, выход которого подключен к электродвигателю 2. В качестве силового модуля в устройстве может быть применен любой из драйверов электродвигателя, рассчитанный на управление двигателем применяемого типа и имеющий достаточную мощность.
Блок управления 11 устройства может быть выполнен как в виде аппаратного модуля, так и, в виде аппаратно-программного комплекса, в состав которого наряду со специализированными аппаратными средствами входит компьютер, снабженный необходимым программным обеспечением и любым из известных видов интерфейса для подключения к аппаратным средствам устройства (например, USB-интерфейсом).
Ключевой особенностью первого варианта предлагаемого устройства, направленной на достижение технического результата изобретения, является то, что в состав его блока управления 11 входит модуль 17 формирования задания по углу поворота подвижной штанги, выполненный таким образом, что он формирует последовательность сигналов периодического, затухающего или апериодического вида, обеспечивая при этом возможность регулирования частоты следования таких сигналов, периода и амплитуды сигналов, скорости их затухания. Модуль 17 может быть выполнен в аппаратном исполнении, а также в виде программного блока или их комбинации.
Возможные дополнения к предлагаемому устройству по первому варианту изображены на схеме, представленной на фиг. 3. Одним из таких дополнений является модуль 20 регулирования динамических характеристик устройства, подключенный к выходу модуля 17 формирования задания по углу поворота подвижной штанги, при этом вход управления модуля 20 подключен к модулю 16 управления программой тренировки. Модуль 20 выполнен таким образом, что по командам, поступающим на его управляющий вход от модуля 16, изменяется ширина полосы пропускания для сигнала, поступающего с модуля 20 на вход ПИД-регулятора 18. Кроме того, модуль 20 по командам от модуля управления 16 может вносить дополнительную регулируемую задержку сигнала, поступающего на его вход.
Также на фиг. З изображена подключенная к блоку управления 11 видеокамера 21, выполняющая совместно с необходимым аппаратно-программным обеспечением, которым снабжен блок управления 11, функцию средства детектирования движущихся в направлении мишени объектов. Необходимо отметить, что указанное средство детектирования внешних объектов (например, видеокамера 21) может быть установлено как непосредственно на подвижной мишени 4, так и вне ее. В последнем случае, при неподвижной установке этого средства (например, видеокамеры), реализация функции обнаружения внешних объектов может быть в значительной мере упрощена и сделана более надежной, так как в этом случае при движениях мишени не возникает перемещения фона и фоновых объектов, попадающих в поле зрения средства детектирования.
На фиг. 3 в качестве еще одного из возможных дополнений к устройству изображен пульт (манипулятор) 22, также подключенный к модулю управления программой тренировки 16 блока управления 11.
Рассмотрим, как заявляемый способ интерактивной тренировки (его варианты) осуществляется при работе с первым вариантом заявляемого устройства для интерактивной тренировки.
Рассмотрим реализацию способов интерактивной тренировки на примере бокса, хотя заявляемые варианты способа и устройства для тренировок могут применяться, как уже отмечалось, в других видах единоборств, таких как карате, кикбоксинг, а также при различных видах игровой активности.
При осуществлении первого варианта способа интерактивной тренировки спортсмен находится перед устройством и производит попытки нанесения ударов по мишени, используя различные виды и комбинации видов ударов. Блок управления 11 (фиг. 1) устройства приводит мишень 4 в движение путем подачи на электродвигатель 2 сигнала, выработанного модулем 17 формирования сигнала задания по углу поворота подвижной штанги (фиг. 2). Положение мишени 4 и соответствие этого положения сигналу задания контролируется блоком управления 11 с помощью датчика 10 угла поворота (энкодера), т.е. с помощью этого датчика осуществляется необходимая обратная связь. Для обеспечения в каждый момент времени наилучшего соответствия положения мишени сигналу задания обратная связь с датчиком 10 в устройстве может осуществляться через посредство соответствующим образом настроенного ПИД-регулятора, который, как известно, широко применяется в системах управления для получения высокой точности и качества переходных процессов.
Для имитации движений реального партнера модуль 17 (фиг. 2) формирования задания по углу поворота подвижной штанги вырабатывает последовательность сигналов периодического характера (в качестве примера - кривая 23 на фиг. 4), затухающего характера (пример - кривая 24) или апериодического характера (кривая 25 - пример апериодического сигнала с низкой степенью демпфирования, кривая 26 - пример апериодического сигнала с высокой степенью демпфирования). При этом модуль формирования 17 обеспечивает возможность регулирования частоты следования таких сигналов, периода и амплитуды колебаний сигналов, центрального положения, относительно которого происходит колебательное движение, скорости затухания колебаний, т.е. степени их демпфирования. Форма сигналов может быть как гармонической, так и негармонической. Пример последовательности колебаний при регулировании частоты их следования, амплитуды, центрального положения и степени демпфирования приведен на фиг. 5 (кривая 27), показывающей изменение во времени угла отклонения штанги относительно ее центрального положения при совершении колебаний.
Оценка результативности действий тренирующегося и сбор статистических данных о ходе тренировки производится с помощью датчика ударов 12, который может регистрировать как количество ударов, так и определять силу каждого удара, попавшего по мишени.
Ключевой особенностью заявленного по первому варианту способа тренировки является то, что непосредственно во время выполнения упражнений производят изменения характеристик (параметров) колебаний мишени, а именно, периода, амплитуды, степени демпфирования колебаний, а также центрального положения, относительно которого создают колебания мишени.
Использование движения мишени в виде описанной последовательности колебаний для имитации движений соперника при осуществлении первого варианта предлагаемого способа тренировки основано на том, что движения реального партнера во время боксерского поединка или иного единоборства, основаны на нескольких закономерностях. Во-первых, определенное количество времени реальный партнер не изменяет своего положения, а находится в основном (центральном) положении, т.е. в т.н. базовой стойке. Во-вторых, с некоторой периодичностью или с неравными промежутками времени реальный партнер совершает движения, имитирующие уклоны от ударов. Такие движения могут следовать подряд одно за другим, прерываться на какие-то промежутки времени, вновь возобновляться, при этом амплитуда, темп следования и скорость этих движений также в значительной степени варьируются спортсменом. В-третьих, спортсмен время от времени также может изменять свое основное (центральное) положение, относительно которого он совершает движения. Целью спортсмена при всех этих его действиях является создание максимально возможной непредсказуемости его положения для его соперника и, тем самым, максимальное усложнение для соперника задачи точного нанесения ударов.
Характер движения мишени, который обеспечивает первый вариант предлагаемого способа тренировки, основан на создании достаточно точной имитации движений реального спортсмена, поскольку учитывает описанные закономерности, и именно за счет этого большего сходства с действиями реального спортсмена достигается повышение эффективности тренировок и тем самым достигается технический результат изобретения. Дополнительным техническим результатом изобретения, достигаемым при осуществлении предлагаемого способа тренировки по первому варианту, является огромная вариативность характера движения мишени, открывающаяся за счет возможности создания практически любой временной диаграммы сигнала задания и, тем самым, «рисунка» движения мишени.
При реализации описываемого варианта способа интерактивной тренировки применялись последовательности сигналов вышеперечисленных видов с широким диапазоном регулирования их характеристик. Так, период следования сигналов устанавливался в пределах 0,3 - 3,0 сек, временя затухания 0,5 - 2,0 сек, угловая амплитуда наклонов штанги от -35 до +35 град, угловое смещение центрального положения штанги от - 25 до +25 град. Как показало тестирование, возможность регулирования характеристик управляющих сигналов при проведении тренировок в таком широком диапазоне позволяет достаточно точно имитировать разнообразный характер движения реальных партнеров и добиться практической непредсказуемости таких движений, что, в результате, значительно повышает эффективность тренировок.
Также важно, что изменения параметров колебаний мишени, также как и движения реального партнера, могут иметь как регулярный характер, т.е. повторяться с определенной периодичностью, так и могут быть рандомизированы, т.е. изменения характеристик колебаний могут производиться случайным или псевдослучайным образом. Такая рандомизация колебаний мишени усложняет тренировку и дополнительно приближает характер движения мишени к движению реального соперника.
При регулировании параметров колебаний мишени может быть также реализована эффективная обратная связь с действиями спортсмена, основанная на оценке текущей результативности тренировки. Для осуществления такой обратной связи используются данные, поступающие в модуль управления программой тренировки 16 от средства детектирования ударов 12. Так, при определении относительно частых попаданий по мишени, т.е. в случае, если при текущих параметрах колебаний мишени режим тренировки является слишком простым для спортсмена, модуль управления программой тренировки 16 может снижать среднее значение периода колебаний, увеличивать среднее значения амплитуды и величины изменения центрального положения. При определении относительно редких попаданий по мишени, т.е. в случае, если при текущих параметрах колебаний мишени режим тренировки является слишком сложным для спортсмена, модуль управления программой тренировки 16 может, наоборот, увеличивать среднее значение периода колебаний и уменьшать средние значения амплитуды и величины изменения центрального положения мишени. Изменение степени демпфирования колебаний мишени может также производиться при этом модулем 16, однако, изменение этого параметра, в отличие от вышеуказанных параметров, не определяет непосредственным образом сложность тренировки, а в большей степени влияет на воспринимаемый характер, «стиль» движения мишени и позволяет в значительной мере разнообразить характер проводимой тренировки.
Также необходимо отметить, что при реализации предлагаемого способа тренировки формирование задания по углу поворота подвижной штанги, может осуществляться как программно, например, путем считывания заранее сохраненного сигнала задания из памяти модуля формирования задания по углу 17 (в том числе, сигнала, имеющего псевдослучайный закон изменения), так и может быть использована возможность управления характером колебаний мишени с помощью пульта (манипулятора) 22 (фиг. 3), подключенного к модулю управления программой тренировки 16. При использовании манипулятора управление формированием колебаний мишени осуществляет партнер тренирующегося, выполняющий в данном случае роль оператора, а в качестве манипулятора может быть использован, например, компьютерный джойстик. При реализации предлагаемого способа перемещения органа управления манипулятором могут быть использованы непосредственно для управления положением мишени, а также они могут использоваться для изменения характеристик сигналов колебаний, вырабатываемых блоком управления. Дополнительным техническим преимуществом при осуществлении способа тренировки с использованием манипулятора является возможность не только тренировки техники ударов, но и возможность отработки спортсменами наиболее эффективной тактики защит при проведении уклонов от ударов.
Это же дополнительное преимущество при реализации предлагаемого способа, а именно возможность эффективной тренировки защит, может быть усилено при использовании в рассматриваемом устройстве дополнительного средства, с помощью которого определяют положение партнера тренирующегося или угол наклона его корпуса. В качестве такого средства может использоваться видеокамера, в поле зрения которой находится партнер тренирующегося, а блок управления устройства при этом должен быть оснащен необходимым программным обеспечением. Также это средство может быть выполнено в виде датчика угла наклона относительно горизонта, например, гироскопического датчика или акселерометра или комбинации этих двух датчиков (на схеме не показаны), при этом такой датчик фиксируется на корпусе партнера тренирующегося, например, с помощью ремня. При использовании такого средства в составе устройства для интерактивных тренировок формирование последовательности вынужденных колебаний мишени производят с учетом вышеуказанного положения и/или наклона корпуса, т.е. верхней части тела партнера тренирующегося.
Проведение тренировки при использовании такого средства осуществляется следующим образом: один из спортсменов наносит удары по мишени, в это же время его партнер внимательно наблюдает за его действиями, находясь несколько в стороне от траектории движений ударов, и производит движения уклонов от ударов. Информация о движениях второго из спортсменов поступает в модуль управления программой тренировки 16, который затем формирует сигнал задания для угла поворота подвижной штанги для создания последовательности вынужденных колебаний мишени с учетом этой информации. При этом возможна реализация способа тренировки, при которой движение мишени непосредственно повторяет движение второго спортсмена, также возможна реализация, при которой колебания мишени происходят и в отсутствие движений второго спортсмена, а параметры колебаний модулируются в соответствии с движениями спортсмена. Кроме того, может быть предусмотрен режим тренировки, комбинирующий эти две возможности.
Для осуществления второго варианта предлагаемого способа может быть использовано предлагаемое устройство в версии, имеющей вышеописанное дополнение в виде подключенного к дополнительному входу блока управления средства детектирования движущихся в направлении мишени объектов.
В качестве примера осуществления второго варианта предлагаемого способа рассмотрим проведение тренировки по боксу при использовании в качестве средства обнаружения внешних объектов видеокамеры 21 (фиг. 3), подключенной к модулю управления программой тренировки 16, в качестве которого может быть применен компьютер, оснащенный необходимым программным обеспечением.
Тренировка происходит следующим образом. Спортсмен производит попытки нанесения ударов по мишени, при этом с помощью видеокамеры 21 в устройстве производится обнаружение объектов, движущихся в направлении мишени, а именно, рук спортсмена в боксерских перчатках. Информация о таких объектах поступает от видеокамеры 21 в модуль управления программой тренировки 16 блока управления устройства, который производит оценку относительного положения этих объектов и мишени 4, и при их значительном сближении блок управления вырабатывает сигнал задания для двигателя таким образом, что происходит отклонение мишени, полностью или частично препятствующее точному нанесению удара по ней. Тренировочный эффект для спортсмена при использовании описанного способа тренировки заключается в том, что уклонение мишени от ударов стимулирует спортсмена к нанесению более быстрых и более скрытных ударов, при этом в отличие от тренировки с реальным партнером, спортсмен имеет возможность наносить удары в полную силу, не испытывая необходимости сдерживать предельную силу ударов из-за опасений нанести партнеру травму.
Однако, в случае, если скорость реакций устройства во время тренировки будет постоянной, то это означает значительное отличие от ситуации реального поединка и такое отличие может значительно снижать эффективность тренировки. Например, если время реакции устройства всегда достаточно мало для того, чтобы мишень успешно уклонялась от ударов даже при тренировках спортсменов высокой категории, то это делает эффективность тренировок низкой, являясь для спортсменов значительным демотивирующим фактором. По этой причине при осуществлении предлагаемого способа по второму варианту используется вышеописанное дополнение к устройству в виде модуля регулирования динамических характеристик 20 (фиг. 3), которым оснащен блок управления устройства. Такой модуль может быть выполнен как аппаратным, так и программным образом и позволяет производить регулирование одного или сразу нескольких параметров, таких как полоса пропускания, время отклика цепи управления, используемого диапазона значений скорости и ускорения движения подвижной штанги 3 (фиг. 1). Также с этой целью может использоваться введение дополнительной задержки между обнаружением движущихся объектов и выработкой блоком управления 11 сигнала задания для перемещения мишени 4 в новую позицию. Изменение любого из перечисленных параметров позволяет достаточно эффективно регулировать результирующее время реакции устройства на приближение к мишени движущихся объектов, что позволяет радикальным образом усовершенствовать процесс тренировки и увеличить эффективность тренировок за счет значительного улучшения качества имитации поединка с реальным соперником.
Рассмотрим пример регулирования динамических характеристик устройства при осуществлении второго варианта предлагаемого способа тренировки, проиллюстрированный диаграммами на фиг. 6. На этой фигуре по оси ординат величине L соответствует текущее значение расстояния между мишенью и внешним объектом, а величине А - текущее значение угла поворота штанги 3. В исходном состоянии мишень находится в позиции, которая определяется исходной величиной угла поворота штанги А1. При обнаружении внешнего объекта в момент времени t0 блок управления производит оценку расстояния между обнаруженным объектом и мишенью, которое на приведенной диаграмме обозначено как L0. Далее, блок управления с определенной тактовой частотой определяет новые положения объекта относительно мишени, а в промежутках времени между отсчетами производит аппроксимацию изменения расстояния между ними (кривая 28 на фиг. 6). При критическом сближении объекта и мишени, а именно, при уменьшении расстояния между ними до величины меньшей L1, в момент времени t1 блок управления вырабатывает сигнал задания для перемещения мишени в новую позицию, которой соответствует угол поворота штанги А2.
Кривые 29, 30, 31 и 32 на фиг. 6 иллюстрируют возможность реализации различного характера перемещения мишени в новую позицию при различном времени реакции устройства, определяемом его динамическими характеристиками, в том числе при изменении ширины полосы пропускания цепи управления, а также при введении дополнительной задержки в цепи сигнала управления. Так, кривая 29 показывает характер изменения угла поворота штанги при переходе мишени в новую позицию для случая широкой полосы пропускания цепи управления и нулевой дополнительной задержке сигнала. В этом случае переход мишени в новую позицию происходит относительно быстро и его можно считать состоявшимся в момент времени tl (можно считать, что такой переход состоялся, если значение угла поворота штанги А достигло величины 90% от разности А2-А1). Кривая 30 соответствует более узкой по отношению к кривой 29 полосе пропускания цепи управления (также при отсутствии дополнительной задержки сигнала) и иллюстрирует более медленный характер изменения угла поворота штанги при переходе мишени в новую позицию. В этом случае переход мишени в новую позицию можно считать состоявшимся в более поздний момент времени t3. Кривые 31, 32 показывают характер изменения угла поворота штанги при переходе мишени в новую позицию при широкой и, соответственно, узкой полосе пропускания цепи управления при наличии дополнительной задержки сигнала на величину Tdel.
Необходимо отметить, что возможность регулирования времени реакции устройства путем изменения различных параметров, таких как полоса пропускания цепи управления и время дополнительной задержки сигнала управления, создает дополнительный технический результат, выражающийся в возможности имитации при тренировках не только различного времени реакции соперников, но и различных стилей их движения. Так, использование широкой полосы пропускания цепи управления и регулирование времени реакции изменением времени дополнительной задержки соответствуют имитации стиля спортсменов, для которых при уклонах характерны более резкие движения, что, как правило, характерно для спортсменов более легких весовых категорий. Использование более узкой полосы пропускания цепи управления соответствуют имитации стиля спортсменов, для которых характерны менее резкие, более слитные движения, что, как правило, характерно для спортсменов более тяжелых весовых категорий.
Также необходимо отметить, что влияние на время реакции устройства и характер перемещения мишени аналогичное тому, которое оказывает изменение полосы пропускания цепи управления, также может быть достигнуто путем непосредственного задания максимальных значений скорости и/или ускорения мишени, что может быть осуществлено путем аппаратной или программной реализации.
Использование предлагаемого способа тренировки по второму варианту открывает сразу несколько новых возможностей для повышения эффективности интерактивных тренировок.
Так, например, если в течение определенного времени спортсмену не удается наносить успешные удары по мишени, то регулировкой одного из перечисленных или сразу нескольких параметров время реакции устройства может быть увеличено. Если через какое-то время после этого спортсмен достаточно часто стал достигать успеха, то время реакции устройства может быть вновь уменьшено, т.е. задача для спортсмена может быть вновь усложнена, однако теперь, после достижения успеха при предыдущих настройках устройства, спортсмен гораздо сильнее мотивирован и, главное, лучше представляет что именно необходимо менять в технике ударов для достижения их большей скорости и эффективности.
Также, при использовании рандомизированного регулирования времени реакции устройства, т.е. при его изменении по случайному или псевдослучайному закону, при тренировках может быть достигнут дополнительный положительный эффект, заключающийся в возможности отработки сохранения стабильного баланса при нанесении спортсменом ударов. В этом случае, при изменении времени реакции устройства в значительных пределах, поскольку спортсмену заранее не известно с какой скоростью реакции отреагирует мишень на его удар, техника удара спортсмена должна быть специальным образом адаптирована. В одном случае, если реакция устройства оказывается медленной и состоится попадание удара по мишени, задача спортсмена состоит в том, чтобы удар был достаточно сильным, что требует вкладывания в удар энергии тела спортсмена. В противоположном случае, если реакция устройства достаточно быстрая и мишень успевает от удара уклониться, то спортсмен, несмотря на вкладывание в удар энергии тела, должен уметь сохранить при этом правильный баланс, не потерять равновесие и максимально быстро вернуться в правильную исходную стойку. Важность этого обусловлена тем, что результатом потери баланса после промаха, например, при «заваливании» корпуса вперед, во время реального поединка спортсмен может быть эффективно контратакован одним или серией встречных ударов. Такая ситуация, как известно, достаточно часто возникает во время спортивных поединков в таких видах спорта, как бокс. Описанный способ ведения тренировки радикально увеличивает эффективность тренировки, поскольку имитируется работа с реальным соперником, скорость реакций которого во время поединка может сильным образом варьироваться. При этом осуществляется не только тренировка умения наносить быстрые и сильные удары, но и тренировка жизненно важного для спортсменов умения в любой ситуации, в том числе после промахов, сохранять баланс и надежную стойку.
Еще одна возможность для повышения эффективности тренировок за счет регулирования динамических характеристик устройства открывается при использовании возможности имитировать накопление усталости оппонента или, наоборот, восстановление его сил. Для имитации накопления усталости оппонентом среднее время реакции устройства увеличивается, а для имитации восстановления его сил - среднее время реакции устройства уменьшается. Такая регулировка времени реакции устройства может производиться с учетом активности действий спортсмена, например, при увеличении спортсменом частоты попыток нанесения ударов и/или улучшении их результативности среднее время реакции устройства может увеличиваться и, наоборот, среднее время реакции устройства может уменьшаться при менее активной и/или менее результативной работе спортсмена. После успешных и достаточно сильных ударов спортсмена по мишени может также производиться значительное увеличение времени реакции устройства на определенный временной интервал. Более того, при нанесении спортсменом ударов по мишени достаточной силы может также быть осуществлена имитация нокдауна или нокаута, для чего время реакции устройства сразу после таких ударов на достаточно длительный период времени может быть увеличено на значительную величину, так что устройство фактически перестает реагировать на действия спортсмена.
Описанное регулирование динамических характеристик перемещения мишени приводит к значительному повышению эффективности тренировки за счет более точной имитации работы с реальным соперником и достигаемого при этом резкого увеличения мотивации спортсмена к предельно активной работе во время тренировки для того, чтобы получить вознаграждение в виде усталого «соперника», который чаще пропускает отдельные удары и серии ударов.
Дополнительным техническим результатом при регулировании динамических характеристик перемещения мишени является возможность имитации соперников как с различными скоростными кондициями, так и, как уже отмечалось, с различным стилем движения во время спортивного поединка.
При осуществлении способа интерактивной тренировки помимо уклонения мишени от обнаруженных движущихся объектов может быть также реализован режим, при котором производится расчет траектории таких объектов и перемещение мишени в сторону их расчетной траектории. Такой режим может использоваться для создания различных видов игровой активности, в том числе в таких видах спорта как футбол или хоккей. Регулирование времени реакции системы путем регулирования динамических характеристик мишени или введением дополнительной задержки в цепи управления в этом случае также дает технический результат, выражающийся в повышении эффективности тренировки, за счет значительного улучшения качества имитации взаимодействия с реальным соперником и возможности в широких пределах варьировать как уровень физических кондиций соперника, так и характер (стиль) его движений.
При реализации описываемого способа тренировки ставилась задача получить достаточно широкий диапазон регулирования времени реакции устройства, который перекрывает соответствующий диапазон времени реакции, характерный для спортсменов. Известно, что время простой моторной реакции на зрительный стимул для обычных (не тренированных) людей составляет величину 230-350 мс, в то время как у подготовленных спортсменов, например, боксеров и единоборцев, оно может составлять 150 мс. Для получения достаточно малой величины времени реакции системы в качестве средства детектирования движущихся в направлении мишени объектов использовалась высокоскоростная видеокамера с частотой обновления кадров 500 Гц, что в комбинации с мощным 4 кВт электроприводом, приводящим в движение штангу с мишенью, обеспечило возможность получить минимальную задержку между началом движения объекта в сторону мишени и началом движения самой мишени менее 10 мс. Полное время, требуемое системе для уклонения мишени от удара, или, наоборот, для занятия позиции, находящейся на расчетной траектории движущегося объекта, составило величину менее 70 мс. Для регулирования динамических характеристик блока управления применялись вышеописанные технические приемы, а именно, регулирование полосы пропускания цепи сигнала управления, введение в цепь управления дополнительной задержки, ограничение максимальной величины скорости и ускорения движения штанги. Это позволило не только в широких пределах регулировать итоговое эффективное время реакции системы (например, время, требуемое системе для уклонения мишени от удара, регулировалось в пределах 70 мс - 500 мс), но и путем установки различных комбинаций перечисленных параметров имитировать различный характер (стиль) движений мишени.
Рассмотрим реализацию второго варианта устройства для осуществления предложенных вариантов способа интерактивной тренировки. Схема устройства изображена на фиг. 7.
Устройство содержит общее основание 1 (фиг. 7), на котором установлены первый электродвигатель 2 и подвижное основание 33, установленное на оси 5, расположенной горизонтально или под некоторым углом к горизонту. Вал 6 первого электродвигателя 2 соединен с подвижным основанием посредством механической передачи, а именно через посредство шкивов 7, 9 и приводного ремня 8.
На подвижном основании 33, в свою очередь, размещены второй электродвигатель 34 и подвижная штанга 3, установленная на подвижном основании через посредство оси 35. На одном из концов штанги 3 закреплена мишень 4 для нанесения ударов, выполненная в виде боксерского мешка. Подвижная штанга 3 соединена с валом второго электродвигателя посредством механической передачи с помощью шкивов 36, 37 и приводного ремня 38.
Необходимо также отметить, что горизонтальное расположение оси 5 является оптимальным, поскольку отклонение оси 5 от горизонтальности приводит к уменьшению диапазона перемещения мишени 4.
Устройство также оснащено средством для определения положения мишени, выполненным в виде двух датчиков угла поворота (энкодеров) 10, 39 установленных, соответственно, на оси 5 подвижного основания 33 и на оси 35 подвижной штанги 3. Устройство имеет блок управления 11, к которому подключены датчики (энкодеры) 10, 39, а также первый 2 и второй 34 электродвигатели.
Также как и устройство, выполненное по первому предлагаемому варианту, устройство оснащено подключенными к блоку управления 11 датчиком ударов 12, установленном на мишени 4, средством ввода режимов тренировки 13, выполненном, например, в виде клавиатуры, средством для отображения результатов тренировки 14, выполненном в виде дисплея, а также средством для воспроизведения звука 15.
Также необходимо отметить, что при реализации описываемого устройства возможно использование иных компонентов, выполняющих описанные функции. Так, в качестве средства, определяющего положение мишени, взамен двух энкодеров 10, 39, установленных на осях 5 и 35, могут использоваться два одноосевых или один двухосевой датчик инерциального типа (акселерометр или гироскопический датчик или их комбинация), установленные непосредственно на штанге 3 и формирующие выходные сигналы, соответствующие углам поворота штанги относительно осей 5 и 35.
Выполнение блока управления 11 второго варианта предлагаемого устройства (схема фиг. 8) имеет следующие отличия от блока управления первого варианта устройства. В силу того, что в данном случае в устройстве производится управление двумя электродвигателями, блок управления 11 дополнительно снабжен вторым ПИД-регулятором 40, а также вторым силовым модулем 41. Модуль 17 формирования задания по углу в данном случае выполнен двухканальным, т.е. имеет два выхода и, соответственно, обеспечивает формирование задания для двух углов поворота подвижной штанги 3 - угла поворота относительно оси 5 и относительно оси 35. Дополнительный выход модуля 17 подключен ко входу второго ПИД-регулятора 40, вход обратной связи ПИД-регулятора 40 подключен к датчику угла поворота (энкодеру) 39, выход ПИД-регулятора 40 подключен ко входу силового модуля 41, выход которого подключен к электродвигателю 34.
Необходимо отметить, что также как и для первого варианта устройства, использование в устройстве ПИД-регуляторов не является обязательным, однако, их наличие позволяет достичь лучших переходных характеристик при управлении устройством.
Рассмотрим, как оба варианта заявляемого способа интерактивной тренировки осуществляются при работе со вторым вариантом заявляемого устройства для интерактивной тренировки.
Осуществление первого варианта предлагаемого способа интерактивной тренировки при использовании второго варианта предлагаемого устройства производится в целом подобно вышеописанному для первого варианта устройства. А именно, спортсмен производит попытки нанесения ударов по мишени, в то время как устройством осуществляются движения мишени 4 (фиг. 7) в виде последовательности вынужденных колебаний периодического и/или затухающего и/или апериодического характера, при этом характеристики этих колебаний во время тренировки регулируются. Также с помощью датчика удара 12 производится регистрация попаданий в мишень, а текущий ход тренировки и ее результаты отображаются с помощью дисплея 14. Основным отличием от тренировок с первым вариантом предлагаемого устройства является то, что конструкция второго варианта устройства в ее основной конфигурации позволяет производить перемещения мишени 4 и совершение ею колебаний в любом из направлений, являющихся суперпозицией перемещений мишени в двух взаимно перпендикулярных направлениях. Одно из этих перемещений мишени осуществляется при вращательных движениях подвижного основания 33 относительно оси 5 и производится первым электродвигателем 2. Второе из этих перемещений мишени осуществляется в перпендикулярном направлении, происходит при вращательных движениях подвижной штанги 3 относительно оси 35 и производится вторым электродвигателем 34. Итоговое перемещение мишени, вызванное работой двух электродвигателей в предлагаемом устройстве, можно описать как векторную сумму (или суперпозицию) перемещений мишени, производимых в двух взаимно перпендикулярных направлениях.
При осуществлении способа тренировки перемещение мишени, также как и при его осуществлении с первым вариантом устройства, осуществляется в виде последовательности колебаний различного характера, однако, возможности для тренировок при этом значительно расширяются, так как такие колебания могут производиться в большом многообразии направлений движения мишени и видов траектории движения. Например, движения мишени могут иметь прямолинейный характер - в любом произвольно выбранном направлении, они также могут быть круговыми или происходить по любой более сложной произвольной траектории. Для задания произвольной траектории движения мишени при ее колебательном движении в блоке управления устройством 11 требуется лишь осуществление стандартной операции разложения требуемого вектора перемещения на две взаимно перпендикулярные составляющие, после чего блоком управления, а точнее модулем формирования задания по углу 17 (фиг. 8) производится формирование сигнала задания для каждого из двух электродвигателей 2, 34.
Основным преимуществом при проведении тренировок с предлагаемым устройством, выполненным по второму варианту, по сравнению с наиболее близким аналогом устройства, а также по отношению к предлагаемому устройству по первому варианту, является возможность имитации независимых движений партнера в направлении влево-вправо относительно тренирующегося (в боксе применяется преимущественно при уклонах от прямых ударов), в направлении вперед-назад (в боксе применяется преимущественно при уклонах от боковых ударов), а также движений в любом произвольном направлении. При этом, в отличие от описанного выше наиболее близкого аналога устройства, для движения мишени 4 в произвольном направлении не требуется предварительный поворот подвижной штанги на определенный угол, за счет чего движение в заданном направлении производится немедленно при подаче соответствующих сигналов задания для двух электродвигателей. Указанные преимущества приводит к значительно большей вариативности движения мишени, что увеличивает эффективность тренировок.
Для осуществления второго варианта предлагаемого способа интерактивной тренировки при использовании второго варианта предлагаемого устройства также используется вышеописанное дополнение в виде подключенного к дополнительному входу блока управления 11 средства детектирования движущихся в направлении мишени объектов. С этой целью, как уже указывалось, может использоваться, например, видеокамера, при этом блок управления 11 должен быть оснащен необходимым программным обеспечением. Также с этой же целью могут быть использованы различные виды сенсоров приближения.
Проведение тренировки в соответствии со вторым вариантом предлагаемого способа тренировки при использовании устройства, выполненного по второму варианту, в целом осуществляется аналогично использованию первого варианта устройства. А именно, при осуществлении спортсменом попыток нанесения ударов по мишени 4 устройством производится детектирование движущихся объектов (например, рук спортсмена в перчатках) и перемещение мишени в новую позицию таким образом, чтобы затруднить для спортсмена возможность попадания в мишень. При этом во время тренировки также производится регулирование эффективного времени реакции устройства, требуемого для перемещения мишени 4 в новую позицию. Отличием от тренировки с устройством, выполненным по первому предлагаемому варианту, является то, что в этом случае при реагировании устройства на появление движущихся объектов открываются более широкие возможности в вариативности перемещений мишени, так как исполнение устройства по второму варианту обеспечивает возможность независимого управления движением подвижной штанги по двум осям. За счет этого может быть осуществлена имитация уклонов в направлении влево-вправо относительно тренирующегося, вперед-назад относительно тренирующегося, а также движение в любом произвольном направлении, являющемся суперпозицией таких перемещений. Такая возможность дополнительно улучшает качество имитации тренировки с реальным партнером и за счет этого также ведет к достижению технического результата, выражающегося в дополнительном повышении эффективности тренировок.
Необходимо отметить, что также как и для первого варианта предлагаемого устройства при проведении тренировок с устройством, выполненным по второму варианту, также могут быть использованы все описанные выше и отраженные в формуле изобретения дополнения как к предлагаемому способу тренировки, так и устройству для его осуществления. Каждое из этих дополнений создает определенные дополнительные возможности для проведения тренировок и тем самым вносит дополнительный вклад в достижение технического результата, выражающегося в повышении эффективности интерактивных тренировок.
Также необходимо отметить, что при осуществлении изобретения оба варианта предлагаемого способа интерактивной тренировки могут применяться как по отдельности, так и в сочетании, т.е. возможна их одновременная реализация, поскольку каждый из вариантов предлагаемого способа отражает определенный аспект имитации действий реального партнера. Если при осуществлении первого варианта предлагаемого способа имитируются обманные движения реального спортсмена, которые, как уже отмечалось, как правило, не являются непосредственным ответом на попытки ударов, производимые тренирующимся, то при осуществлении второго варианта предлагаемого способа производятся уклоны от наносимых ударов. Практическая реализация вариантов предлагаемого способа интерактивной тренировки показала, что одновременное применение двух вариантов способа не только возможно, но и позволяет достичь наилучшего качества имитации движения реального партнера, обеспечивая тем самым наибольшую эффективность интерактивной тренировки.
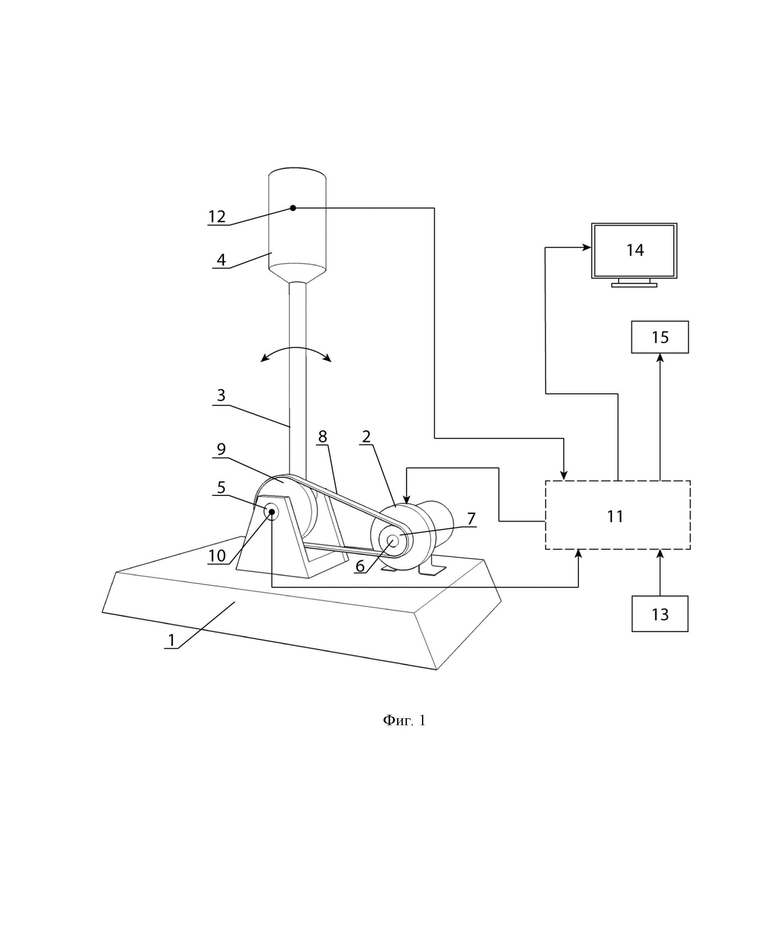
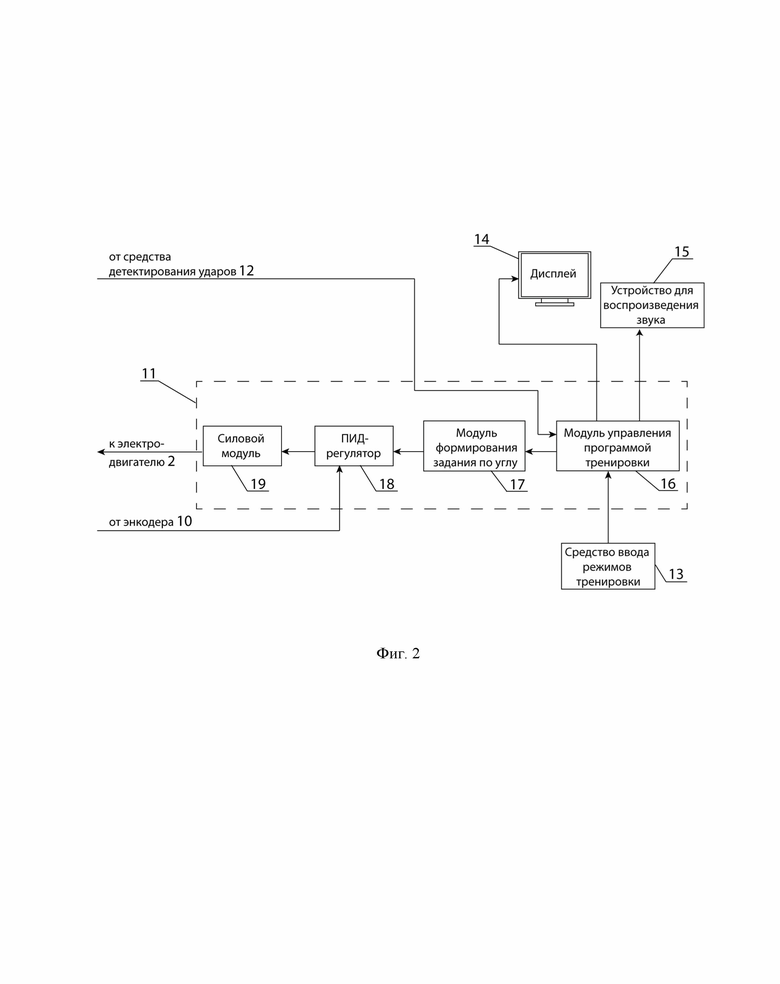
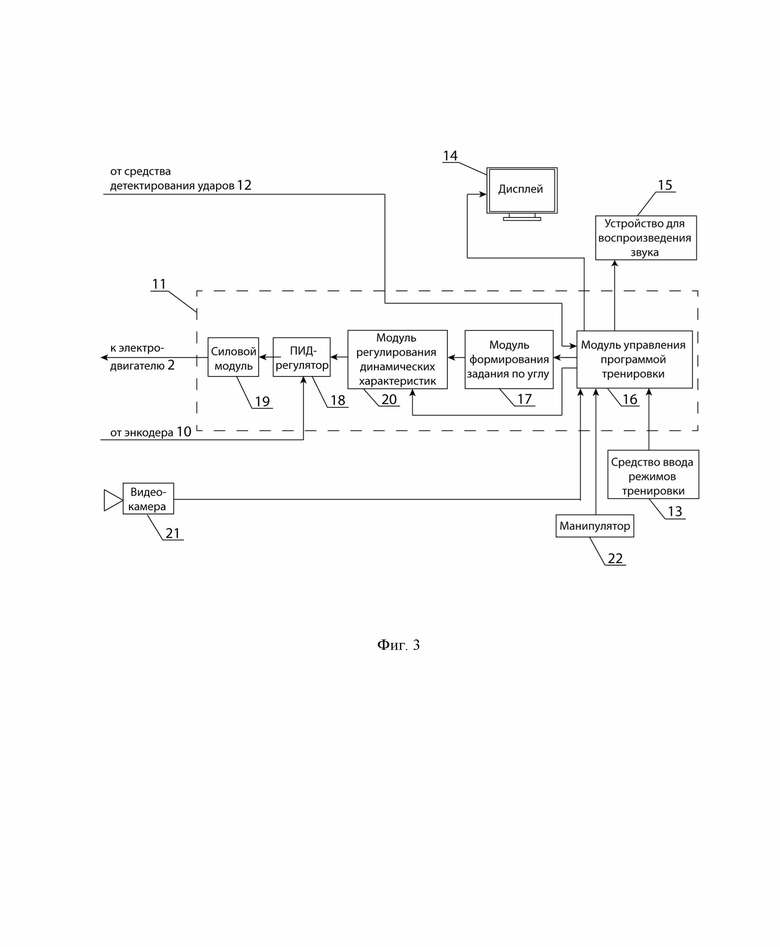
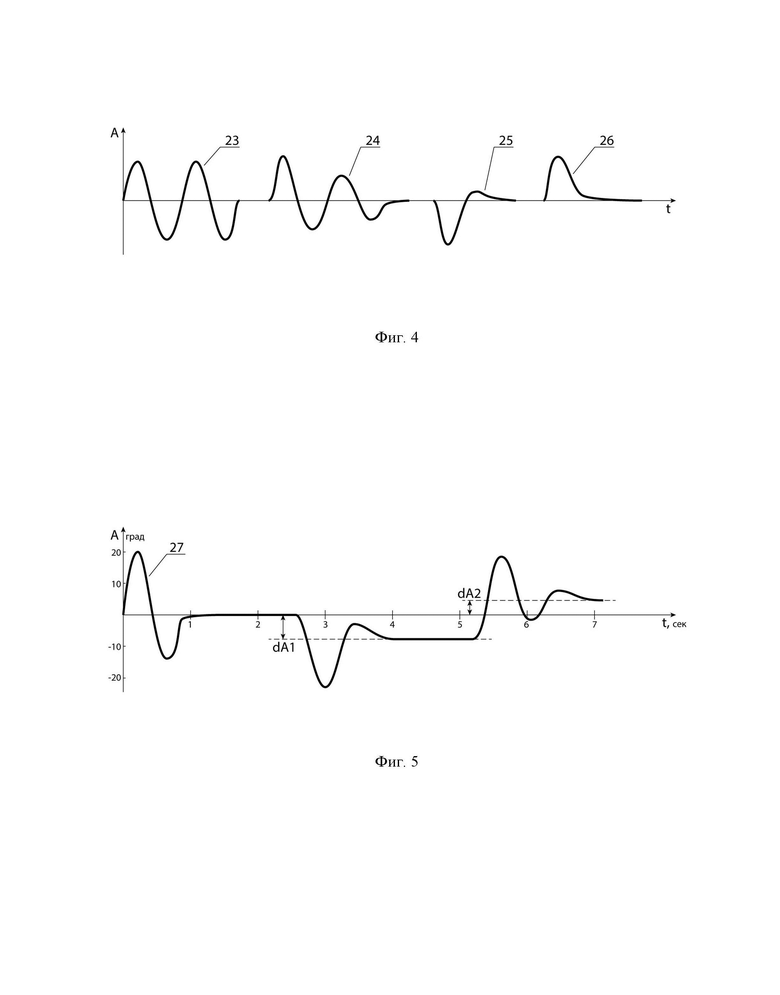
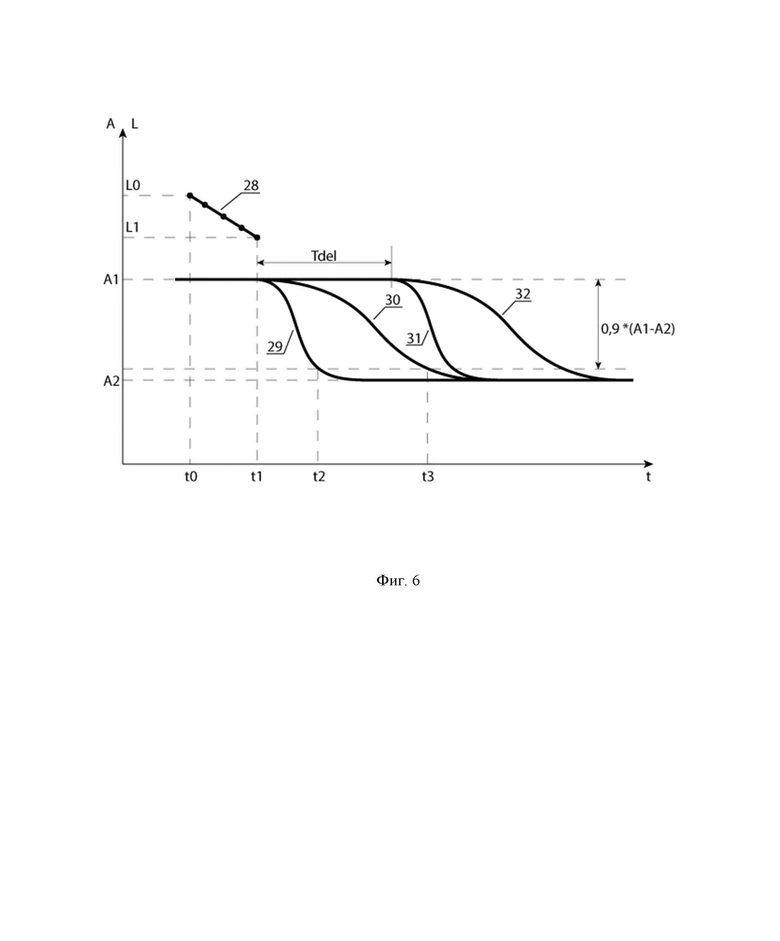
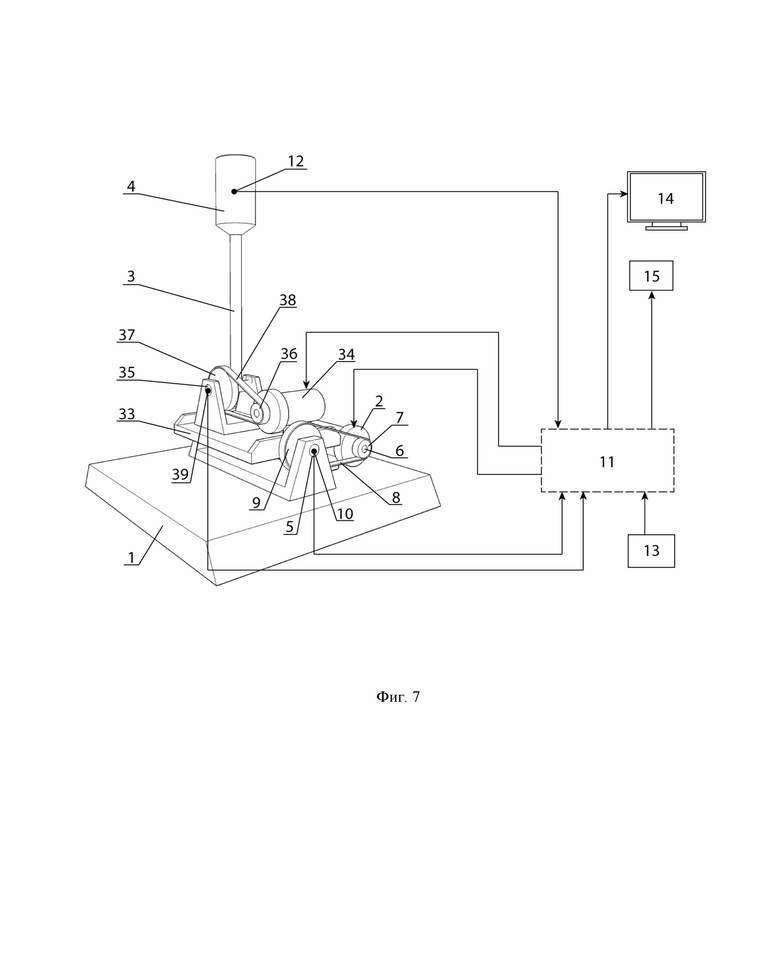
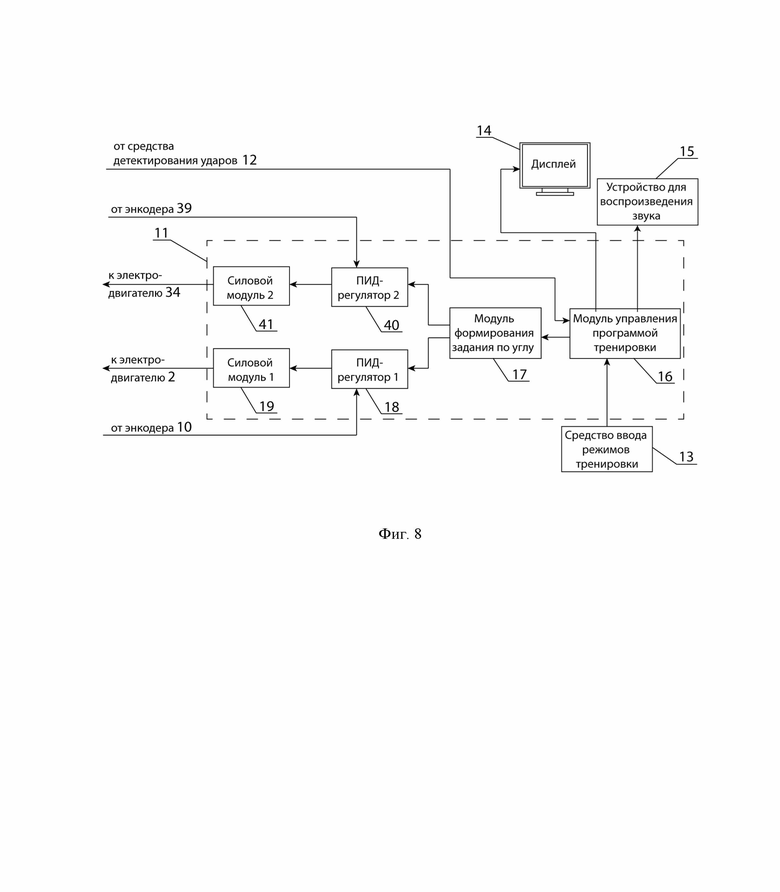
Способ интерактивной тренировки включает нанесение спортсменом ударов по мишени или осуществление бросков метательным снарядом по мишени и установку сложности тренировки. Варианты способа и устройства для его реализации предусматривают имитацию движения партнера путем создания и регулирования параметров вынужденных колебаний мишени различных видов: периодического, и/или затухающего, и/или апериодического, а также перемещение или наклоны мишени при обнаружении движущихся в направлении мишени объектов и регулирование времени реакции на приближающийся объект. 4 н. и 24 з.п. ф-лы, 8 ил. 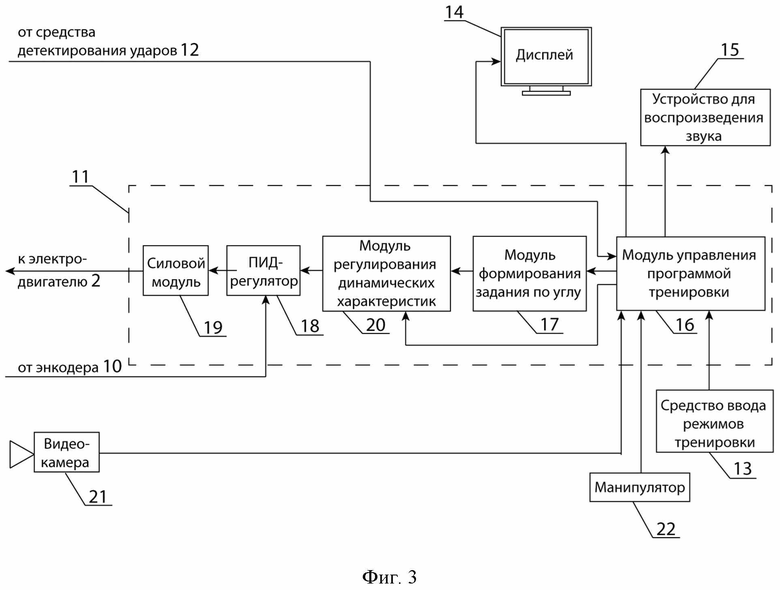
1. Способ интерактивной тренировки, включающий нанесение спортсменом ударов по подвижной мишени или осуществление бросков метательным снарядом по подвижной мишени, создание вынужденных колебаний мишени путем приведения мишени в движение посредством, по крайней мере, одного двигателя, определение попадания в мишень посредством, по крайней мере, одного сенсора, отличающийся тем, что вынужденные колебания мишени создают с помощью имеющегося блока управления, включающего в себя модуль задания по положению мишени, путем формирования последовательности сигналов задания периодического, и/или затухающего, и/или апериодического характера,
при этом во время тренировки производят регулирование характера колебаний мишени путем изменения периода, и/или амплитуды, и/или степени демпфирования колебаний, и/или центрального положения, относительно которого создают колебания мишени.
2. Способ по п. 1, отличающийся тем, что изменения параметров колебаний мишени производят случайным или псевдослучайным образом.
3. Способ по п. 1, отличающийся тем, что изменения параметров колебаний мишени производят с учетом результатов определения попадания в мишень, а именно при определении более частых попаданий по мишени уменьшают среднее значение периода колебаний и/или увеличивают средние значения амплитуды и/или величины изменения центрального положения мишени, а при определении более редких попаданий по мишени, соответственно, увеличивают среднее значение периода колебаний и/или уменьшают средние значения амплитуды и/или величины изменения центрального положения мишени.
4. Способ по п. 1, отличающийся тем, что вынужденные колебания мишени в направлении влево-вправо и в направлении вперед-назад относительно тренирующегося спортсмена создают независимо.
5. Способ по п. 1, отличающийся тем, что формирование последовательности вынужденных колебаний мишени и изменение их параметров осуществляют программно.
6. Способ по п. 1, отличающийся тем, что формирование последовательности вынужденных колебаний мишени и изменение их параметров осуществляет партнер тренирующегося с помощью пульта.
7. Способ по п. 1, отличающийся тем, что формирование последовательности вынужденных колебаний мишени и изменение их параметров осуществляют путем имитации движения корпуса партнера тренирующегося, положение которого определяют с помощью датчиков.
8. Способ интерактивной тренировки, включающий нанесение спортсменом ударов по подвижной мишени или осуществление бросков метательным снарядом по подвижной мишени, обнаружение движущихся в направлении мишени объектов с помощью имеющегося, по крайне мере, одного сенсора, перемещение или наклоны мишени с помощью имеющегося, по крайней мере, одного двигателя, отличающийся тем, что производят установку сложности тренировки путем регулирования времени реакции системы с помощью имеющегося блока управления, включающего в себя модуль задания по положению мишени, посредством регулирования динамических характеристик перемещения мишени и/или временной задержки между обнаружением объекта, приближающегося к мишени, и началом перемещения мишени.
9. Способ по п. 8, отличающийся тем, что осуществляют определение относительного положения движущихся объектов и мишени, при этом перемещение мишени производят таким образом, что обеспечивается ее полное или частичное уклонение от движущихся объектов.
10. Способ по п. 8, отличающийся тем, что при обнаружении движущихся в направлении мишени объектов осуществляют расчет траектории движения этих объектов, при этом перемещение мишени производят в сторону расчетной траектории движения объектов.
11. Способ по п. 8, отличающийся тем, что регулирование времени реакции системы осуществляют случайным или псевдослучайным образом непосредственно во время тренировки.
12. Способ по п. 8, отличающийся тем, что при регулировании времени реакции системы осуществляют имитацию накопления усталости и/или восстановления сил соперником путем увеличения и/или уменьшения среднего значения времени реакции системы.
13. Устройство для интерактивной тренировки, содержащее основание, установленный на основании двигатель, подвижную штангу, механически связанную с валом двигателя, установленную с возможностью наклонов и имеющую закрепленную на одной из ее сторон мишень для нанесения ударов или осуществления бросков, средство для определения положения мишени, блок управления, подключенный к средству для определения положения мишени, а также к двигателю, отличающееся тем, что устройство снабжено подключенными к блоку управления средством детектирования ударов, произведенных по мишени, средством ввода режимов тренировки, в том числе задания ее сложности, средством отображения результатов тренировки, при этом блок управления содержит модуль формирования задания по углу поворота подвижной штанги в виде последовательности сигналов периодического, затухающего или апериодического вида, выполненный с возможностью регулирования частоты следования таких сигналов, периода и амплитуды колебаний сигналов, скорости их затухания.
14. Устройство по п. 13, отличающееся тем, что блок управления дополнительно снабжен подключенным к выходу модуля формирования задания по углу поворота подвижной штанги ПИД-регулятором, вход обратной связи которого подключен к средству определения положения мишени.
15. Устройство по п. 13, отличающееся тем, что блок управления устройства дополнительно снабжен модулем регулирования динамических характеристик устройства, в том числе полосы пропускания и/или времени отклика цепи управления и/или диапазона значений ускорения и/или скорости вращательного движения штанги.
16. Устройство по п. 13, отличающееся тем, что оно дополнительно снабжено средством детектирования движущихся в направлении мишени объектов, подключенным к дополнительному входу блока управления, при этом блок управления выполнен таким образом, что осуществляется расчет относительного положения указанных объектов и мишени и формирование сигналов задания по углу поворота подвижной штанги, исходя из условия полного или частичного уклонения мишени от попадания в нее обнаруженных движущихся объектов путем установки различного времени реакции системы.
17. Устройство по п. 13, отличающееся тем, что оно дополнительно снабжено средством детектирования движущихся в направлении мишени объектов, подключенным к дополнительному входу блока управления, при этом блок управления выполнен таким образом, что осуществляется расчет траектории движения указанных объектов относительно мишени и производится формирование сигналов задания по углу поворота подвижной штанги, обеспечивающее перемещение мишени в сторону расчетной траектории объектов.
18. Устройство по п. 13, отличающееся тем, что в нем дополнительно обеспечивается возможность вертикального перемещения мишени путем того, что подвижная штанга выполнена из двух частей, имеющих возможность продольного перемещения относительно друг друга, при этом одна из частей штанги соединена с основанием, а на другой части штанги размещена мишень, на основании установлен дополнительный двигатель, посредством механической передачи соединенный с частью штанги, на которой закреплена мишень, блок управления устройства имеет дополнительный модуль формирования последовательности сигналов задания по величине относительного перемещения двух частей подвижной штанги, а силовой модуль блока управления имеет дополнительный выход, подключенный к упомянутому дополнительному двигателю.
19. Устройство по п. 13, отличающееся тем, что в него добавлено дискретное или аналоговое устройство ввода, выход которого подключен к дополнительному входу блока управления, при этом блок управления устройства обеспечивает формирование сигналов задания по углу поворота подвижной штанги с учетом положения органа управления устройства ввода.
20. Устройство по п. 13, отличающееся тем, что оно снабжено дополнительным средством для определения положения партнера тренирующегося или наклонов его корпуса, при этом блок управления выполнен таким образом, что обеспечивается формирование сигналов задания по углу поворота подвижной штанги с учетом положения партнера тренирующегося или наклонов его корпуса.
21. Устройство для интерактивной тренировки, содержащее неподвижно установленный первый двигатель, подвижное основание, механически связанное с валом первого двигателя, установленный на подвижном основании второй двигатель, подвижную штангу, механически связанную с валом второго двигателя, установленную с возможностью наклонов и имеющую закрепленную на одной из ее сторон мишень для нанесения ударов или осуществления бросков, средство для определения положения мишени, блок управления, подключенный к средству для определения положения мишени, а также к первому и второму двигателю, отличающееся тем, что подвижное основание установлено на горизонтально или наклонно расположенной оси, при этом механическая связь подвижного основания и вала первого двигателя, а также механическая связь подвижной штанги и вала второго двигателя каждая осуществлена посредством шкивов и приводного ремня.
22. Устройство по п. 21, отличающееся тем, что устройство дополнительно снабжено подключенными к блоку управления датчиком удара, установленным на мишени или подвижной штаге, средством ввода режимов тренировки, в том числе задания ее сложности, средством отображения результатов тренировки.
23. Устройство по п. 21, отличающееся тем, что в нем дополнительно обеспечивается возможность вертикального перемещения мишени путем того, что подвижная штанга выполнена из двух частей, установленных с возможностью продольного перемещения относительно друг друга, при этом одна из частей штанги механически связана с подвижным основанием, а мишень размещена на второй части подвижной штанги, на подвижном основании установлен дополнительный двигатель, вал которого посредством механической передачи связан с частью штанги, на которой закреплена мишень, а блок управления снабжен модулем управления вертикальным перемещением мишени, имеющим выход для подключения дополнительного двигателя.
24. Устройство по п. 21, отличающееся тем, что дополнительно снабжено подключенным к блоку управления средством детектирования движущихся в направлении мишени объектов, при этом блок управления выполнен таким образом, что производится расчет относительного положения указанных объектов и мишени, а управление движением мишени осуществляется таким образом, что обеспечивается полное или частичное уклонение мишени от попадания в нее обнаруженных движущихся объектов.
25. Устройство по п. 21, отличающееся тем, что оно дополнительно снабжено подключенным к блоку управления средством детектирования движущихся в направлении мишени объектов, при этом блок управления выполнен таким образом, что производится определение направления вектора скорости движения объектов, классификация этого направления как прямого или бокового относительно текущего положения мишени, при этом при определении направления как бокового движение мишени осуществляется назад относительно тренирующегося.
26. Устройство по п. 21, отличающееся тем, что оно дополнительно снабжено подключенным к блоку управления средством детектирования движущихся в направлении мишени объектов, при этом блок управления выполнен таким образом, что производится расчет траектории движения указанных объектов относительно мишени, а движение мишени осуществляется таким образом, что обеспечивается перемещение мишени в сторону расчетной траектории объектов.
27. Устройство по п. 21, отличающееся тем, что оно дополнительно снабжено подключенным к блоку управления дискретным или аналоговым устройством ввода, при этом блок управления устройства выполнен таким образом, что при формировании сигналов управления первым и вторым двигателями, обеспечивается перемещение мишени с учетом положения органа управления устройства ввода.
28. Устройство по п. 21, отличающееся тем, что оно дополнительно снабжено подключенным к блоку управления средством для определения наклонов корпуса и/или положения партнера тренирующегося, при этом блок управления устройства выполнен таким образом, что при формировании сигналов управления первым и вторым двигателями, обеспечивается перемещение мишени с учетом наклонов корпуса и/или положения партнера тренирующегося.
| Установка для тренировок в различных видах спорта с мячом | 2017 |
|
RU2675922C1 |
| ПРИБОР ДЛЯ СНЯТИЯ ПРОФИЛЯ РЕЛЬС И Т.П. ПРЕДМЕТОВ | 1926 |
|
SU4690A1 |
| WO 2016007030 A3, 10.03.2016 | |||
| Устройство для тренировки бадминтонистов | 1986 |
|
SU1333351A1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС "УДАР" | 1995 |
|
RU2083252C1 |

