Изобретение относится к способам и устройствам формирования стереоскопических изображений для стереоскопической съемки и может быть использовано для ведения панорамной съемки с вагона-лаборатории при осуществлении визуального контроля конструктивных элементов контактной сети [G03B 7/00, G03B 19/00, G03B 37/00].
Из уровня техники известен МЕТОД ПАНОРАМНОЙ ФОТОСЪЕМКИ [CN 112218004 A, опубл. 12.01.2021] с дополненной реальностью, включающий этапы включения камер захвата и слежения, сращивания разделенных изображений по данным разных датчиков ориентации для получения панорамного эффекта <…>, при этом запуск камер захвата и слежения для начала захвата положения окружающего изображения включает первую и вторую телекоммуникационные камеры захвата и слежения, которые подключены к модулю общей обработки.
Недостатком аналога является стационарный характер размещения камер, что не позволяет производить съемку панорамы в движении и, соответственно, улучшать качество панорамных снимков.
Также известен СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОСКОПИЧЕСКИХ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ С АВТОМАТИЧЕСКИМ ИЗМЕРЕНИЕМ ПРЕДМЕТНОГО ПРОСТРАНСТВА В РЕАЛЬНОМ ВРЕМЕНИ [RU 2490819, опубл. 20.08.2013], при реализации которого осуществляют захват изображений синхронизированными видеокамерами, запоминают и сравнивают видеосигналы сопряженных строк всех камер, находят в допустимых диапазонах линейных параллаксов сигналы от мгновенных изображений предметной точки и измеряют временные параллаксы между сигналами параллаксных камер с сигналом опорной камеры в единой временной системе отсчета, формируют и синхронизируют параллаксные сигналы с видеосигналом строки опорной видеокамеры полного разрешения, передают на приемную сторону и запоминают полученный поток сигналов, восстанавливают видеосигнал второго кадра стереопары смещением элементов сигналов с камеры полного разрешения на сопряженные временные параллаксы и воспроизводят изображение на стереомониторе, измеряют пространственные координаты предметных точек на передающей или приемной стороне по функциональной зависимости дальности от величины базиса стереосъемки, фокусного расстояния объективов и величин временных параллаксов, передают полученную информацию в аналитический блок, в котором анализируют серию стереокадров и вычисляют функции траекторий интересующих предметных точек и объектов с вычислением их первых и вторых производных.
Недостатком аналога является отсутствие функции фиксации получаемых изображений в виде панорамной фотографии, что при выполнении задач визуального контроля конструктивных элементов контактной сети не позволяет повысить качество панорамных снимков.
Наиболее близким по технической сущности является СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ С ДВИЖУЩЕГОСЯ НОСИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ [RU 2498378, опубл. 10.11.2013], включающий фотографирование поверхности несколькими оптико-электронными фотоприемниками с частичным перекрытием получаемых субкадров, образующих кадр центральной проекции в виде полосы, ориентированной длинной стороной поперек направления движения носителя, получение кадров по мере движения носителя с их частичным перекрытием между собой и последующее объединение кадров в единое изображение, при этом субкадры получают, фотографируя поверхность под углом к вертикали, последовательно увеличивающимся к концам полосы, причем все фотоприемники экспонируют одновременно; устройство для реализации способа включает фиксирующее приспособление, в котором закреплены не менее двух оптико-электронных фотоприемников таким образом, что проекции их оптических осей на вертикальную плоскость находятся под углом к вертикали, однонаправленно изменяющимся от фотоприемника к фотоприемнику на величину меньше проекции угла поля зрения фотоприемника на указанную плоскость, при этом проекции оптических осей фотоприемников на другую вертикальную плоскость, перпендикулярную первой, составляют между собой угол не более 50% от проекции угла поля зрения фотоприемника на эту плоскость.
Основной технической проблемой прототипа является съемка камерами одновременно из различного пространственного положения, что способно привести к явлению параллакса и возникновению при сшивке изображений на границах кадров геометрических искажений, что при выполнении задач визуального контроля конструктивных элементов контактной сети не позволяет повысить качество панорамных снимков.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является повышение качества панорамных снимков.
Указанный технический результат достигается за счет того, что способ панорамной съемки включает в себя установку камер на движущемся объекте на расстоянии друг от друга, при этом камеры устанавливают с поворотом на различный угол по отношению к фотографируемому объекту так, чтобы беспараллаксные точки объективов камер располагались на одной прямой, при этом указанная прямая является параллельной направлению движения движущегося объекта, далее измеряют скорость движения движущегося объекта, определяют время, через которое камеры последовательно оказываются в одной и той же точке пространства, и через вычисленные промежутки времени при движении движущегося объекта с измеренной скоростью поочередно включают камеры, далее сшивают полученные кадры в панораму.
В частности, сшивают полученные кадры в панораму при помощи программных средств.
В частности, камеры располагают на крыше вагона-лаборатории.
В частности, измерение скорости осуществляют посредством работы измерителя скорости.
В частности, вычисление времени включения камер осуществляют посредством работы синхронизатора-вычислителя.
Краткое описание чертежей
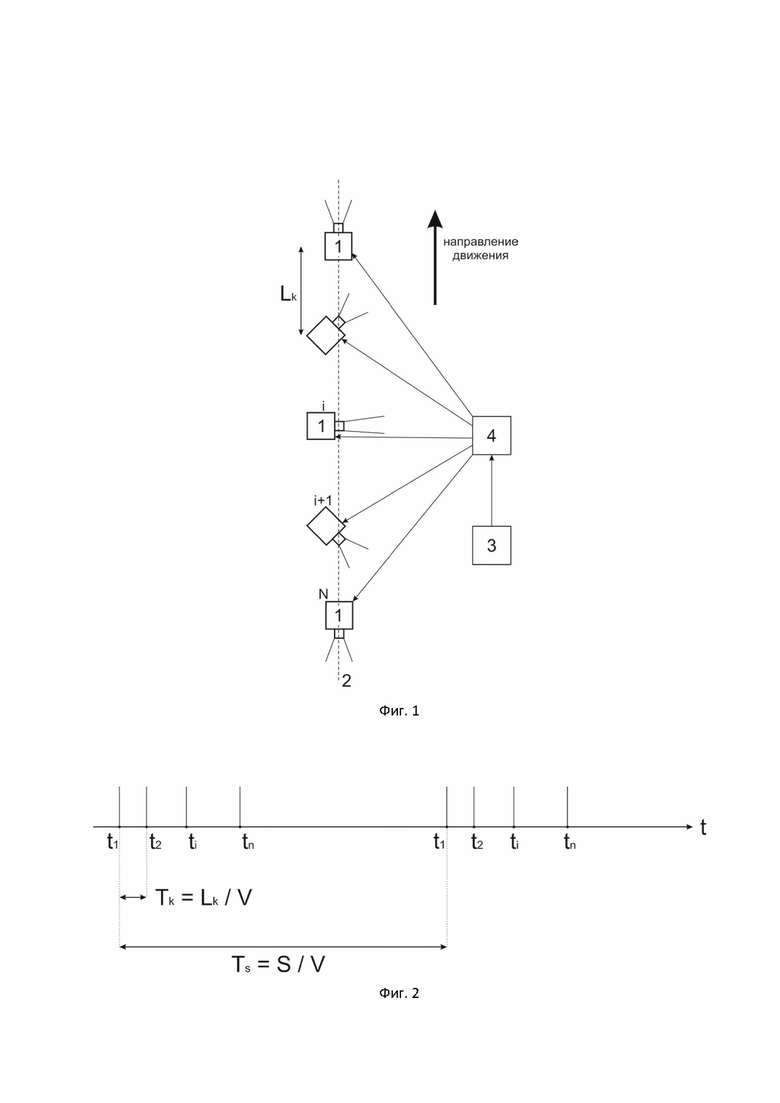
На Фиг. 1 показана схема осуществления способа с помощью технических средств.
На Фиг. 2 показана временная диаграмма осуществления способа.
На фигурах обозначено: 1 - камера; 2 - центральная прямая; 3 - измеритель скорости; 4 - синхронизатор-вычислитель.
Осуществление изобретения
В движении для съемки сферических панорам используют устройства, состоящие из множества камер, расположенных под разными углами друг к другу для получения изображения в разных направлениях. При этом съемка осуществляется камерами одновременно из различного пространственного положения, что принципиально приводит к явлению параллакса, то есть визуального изменения положения наблюдаемого объекта относительно других объектов при изменении положения наблюдателя. Сшивка изображений кадров с разных камер осуществляется специальным программным обеспечением, при этом на границах кадров появляются геометрические искажения, например, в виде разрывов прямых линий или серьезных искажений перспективы.
При съемке сферической панорамы в целях осуществления визуального контроля конструктивных элементов контактной сети блок с телевизионными камерами 1 устанавливают на крыше движущегося объекта, в частности вагона-лаборатории (представляет собой любой железнодорожный или другой рельсовый транспорт, в том числе трамвай), при этом расстояние до контролируемых элементов находится в ближней зоне (до 6 метров от оси крыши вагона-лаборатории). Это определяет необходимость исключения влияния параллакса на получение неискаженных панорам при склейке отдельных кадров специальным программным обеспечением.
Для реализации предлагаемого способа панорамной съемки каждая камера 1 (см. Фиг. 1) в системе из N камер должна осуществлять съемку из одной и той же точки в пространстве.
Для съемки сферических панорам в движении камеры 1 в блоке устанавливают с поворотом на различный угол относительно направления движения и, соответственно, относительно расположения фотографируемого объекта таким образом, чтобы центры оптических систем (беспараллаксные точки) каждой камеры 1 геометрически в пространстве находились на одной центральной прямой 2, направление которой совпадает с направлением движения движущегося объекта (вагона-лаборатории), на котором установлена данная система.
Камеры 1 устанавливают на известном расстоянии Lk. Посредством работы измерителя скорости 3 определяют скорость движения транспортного средства V, далее посредством работы синхронизатора-вычислителя 4 определяют время, через которое камеры 1 и, соответственно, их беспараллаксные точки последовательно оказываются в одной и той же точке пространства. Таким образом, для съемки панорамы камеры дистанционно посредством работы устройства управления (располагается в вагоне-лаборатории, на фигурах не показано) поочередно включают через вычисляемые промежутки времени Tk (см. Фиг. 2):
Tk = Lk/V,
при этом расстояние между камерами Lk для каждого значения k может не быть одинаковым.
Съемку панорам производят через равное, задаваемое пользователем, расстояние S, следовательно, период включения системы Ts также определяют исходя из скорости движения:
Ts = S/V.
После проведения съемки осуществляют сшивку полученных кадров с используемых камер посредством специального программного обеспечения.
Указанный технический результат - повышение качества панорамных снимков - достигается за счет следующих факторов:
- использование для съемки совокупности камер, что увеличивает количество снимков и совокупную точность панорамы, а значит, позволяет повысить качество панорамных снимков;
- расположение центров оптических систем каждой камеры геометрически в пространстве на одной прямой, что позволяет исключить нежелательные смещения объекта на снимках, а значит, повышает качество панорамных снимков;
- расположение камер на заданном расстоянии друг от друга, а также включение камер последовательно через заданные промежутки времени, что позволяет на основании расчетов учесть расположение в пространстве беспараллаксных точек камер относительно точек размещения фотографируемых объектов, что в итоге повышает качество панорамных снимков таких объектов.
В 2023 г. заявителем в соответствии с настоящим описанием были проведены испытания систем панорамной съемки, установленных на вагонах-лабораториях.
Телевизионные камеры в количестве 6 шт. с разрешением не хуже Full-HD устанавливали на крыше вагона-лаборатории на расстоянии Lk = 10…15 см друг от друга, углы поворота камер относительно оси крыши вагона-лаборатории составили в нескольких экспериментах 10…15° для 1-й камеры, 30…40° для 2-й камеры, 70…75° для 3-й камеры, 105…110° для 4-й камеры, 140…150° для 5-й камеры, 165…170° для 6-й камеры. Указанные значения углов были установлены экспериментально и являются оптимальными с точки зрения исключения пропусков в снятой панораме и создания минимально необходимых перекрытий кадров для сшивки изображений.
Съемку производили при скорости движения вагона-лаборатории V = 160 км/ч, соответственно, камеры включали через промежутки времени Tk = 2,25…3,375 мс.
Расстояние между включениями системы камер S составляло не более 1 м, соответственно, периоды включения системы камер составляли Ts = 22,5 мс.
Испытания показали снижение благодаря реализации предложенного способа количества случаев выявления в итоговых панорамных снимках геометрических искажений на границах кадров, например, в виде разрывов прямых линий или серьезных искажений перспективы, что в среднем позволило повысить качество панорамных снимков на 16% относительно снимков, полученных при реализации способов, описанных в аналогах и прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ получения стереоскопических снимков с синтезированной величиной стереобазы | 2019 |
|
RU2703611C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО СОЗДАНИЯ ТРЕХМЕРНЫХ СИСТЕМ ГОРОДСКИХ ПАНОРАМ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2601165C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПАНОРАМНОЙ ФОТОСЪЕМКИ | 2005 |
|
RU2319188C2 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПАНОРАМНОГО ИЗОБРАЖЕНИЯ | 2020 |
|
RU2759965C1 |
| Способ развертки орбитальных панорам | 1977 |
|
SU678292A1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО ПОСТРОЕНИЯ ВИРТУАЛЬНОЙ 3D-СЦЕНЫ НА ОСНОВАНИИ ДВУМЕРНЫХ СФЕРИЧЕСКИХ ФОТОПАНОРАМ | 2024 |
|
RU2826369C1 |
| Станок для покадровой киносъемки движущихся в одном или нескольких ярусах панорам, мультипликационных заготовок или надписей | 1953 |
|
SU115237A1 |
| СПОСОБ ПОСТРОЕНИЯ ФРОНТАЛЬНОЙ ПАНОРАМЫ СТЕЛЛАЖА ИЗ ПРОИЗВОЛЬНОЙ СЕРИИ КАДРОВ ПО 3D-МОДЕЛИ СТЕЛЛАЖА | 2022 |
|
RU2791291C1 |
| Способ панорамной стереосъемки | 2016 |
|
RU2650088C1 |
| Способ получения непрерывного стереоизображения земной поверхности с движущегося носителя | 2018 |
|
RU2686513C1 |
Изобретение относится к способам формирования стереоскопических изображений для стереоскопической съемки. Способ панорамной съемки включает в себя установку камер на движущемся объекте на расстоянии друг от друга, причем камеры устанавливают с поворотом на различный угол по отношению к фотографируемому объекту так, чтобы беспараллаксные точки объективов камер располагались на одной прямой, где указанная прямая является параллельной направлению движения движущегося объекта, далее измеряют скорость движения движущегося объекта и определяют время, через которое камеры последовательно оказываются в одной и той же точке пространства. Через вычисленные промежутки времени при движении движущегося объекта с измеренной скоростью поочередно включают камеры, далее сшивают полученные кадры. Техническим результатом является повышение качества панорамных снимков. 4 з.п. ф-лы, 2 ил.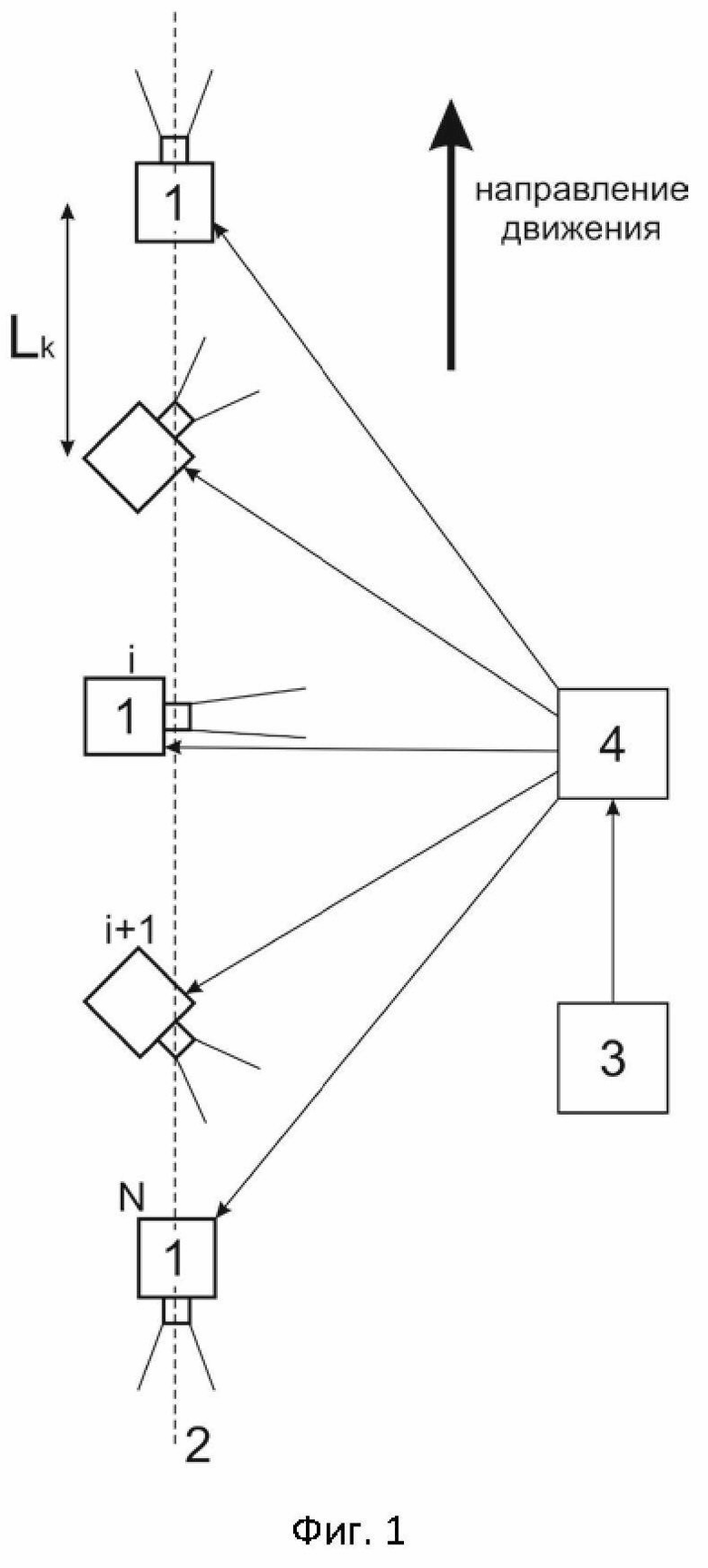
1. Способ панорамной съемки, включающий в себя установку камер на движущемся объекте на расстоянии друг от друга, при этом камеры устанавливают с поворотом на различный угол по отношению к фотографируемому объекту так, чтобы беспараллаксные точки объективов камер располагались на одной прямой, при этом указанная прямая является параллельной направлению движения движущегося объекта, далее измеряют скорость движения движущегося объекта, определяют время, через которое камеры последовательно оказываются в одной и той же точке пространства, и через вычисленные промежутки времени при движении движущегося объекта с измеренной скоростью поочередно включают камеры, далее сшивают полученные кадры в панораму.
2. Способ по п. 1, отличающийся тем, что сшивают полученные кадры в панораму при помощи программных средств.
3. Способ по п. 1, отличающийся тем, что камеры располагают на крыше вагона-лаборатории.
4. Способ по п. 1, отличающийся тем, что измерение скорости осуществляют посредством работы измерителя скорости.
5. Способ по п. 1, отличающийся тем, что вычисление времени включения камер осуществляют посредством работы синхронизатора-вычислителя.
| US 2004223055 A1, 11.11.2004 | |||
| Hamza, A., Hafiz, R., Khan, M.M., Cho, Y | |||
| and Cha, J., 2015 | |||
| Stabilization of panoramic videos from mobile multi-camera platforms | |||
| Image and Vision Computing, 37, pp | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| CN 101082766 A, 05.12.2007. | |||

