Изобретение относится к устройствам для панорамной фотосъемки.
Важнейшими факторами для выполнения качественной фотосъемки являются:
1. Поворот оптической системы вокруг нодальной точки, расположенной на главной оси объектива и находящейся внутри системы линз. Это исключает явление параллакса, что значительно затрудняет сборку исходных изображений в результирующее, а порой даже исключает возможность таковой.
2. Постоянство угла наклона камеры и постоянство угла поворота, а также сохранение плоскостей поворота. Это необходимо для стабильного перекрытья соседних изображений в серии. Как по вертикальной стороне кадра при съемке в один ряд, так и перекрытия по горизонтальным сторонам кадра при многорядной съемке.
3. Сохранение положения нодальной точки объектива относительно точки съемки. В настоящее время для такого типа фотосъемки применяются специальные панорамные головки. Конструкция таких устройств однотипна. Камера крепится на кронштейне с возможностью поворота в одной или двух плоскостях. Причем поворот производится по осям, проходящим через нодальную точку. Положение камеры или настраивается, или же конструкция рассчитана под конкретные модели фотоаппаратуры. Углы поворота отслеживаются по лимбу или же в более дорогих моделях применяется жесткая фиксация поворотов. Таким методом получают серии изображений без проявления эффекта параллакса и стабильным перекрытием, также ориентированные строго по вертикали. Строгая ориентация по вертикали, как правило, не требуется, т.к. современное программное обеспечение, например бесплатный пакет Panorama Tools, разработанный доктором Helmut Dresh.
Такие устройства достаточно дороги и применяются в основном профессиональными фотографами. Применение таких панорамных головок требует установки штатива, что не всегда удобно, как, например, при репортажной съемке или любительской съемке на отдыхе. В результате, несмотря на все растущее увлечение панорамной фотографией, применение таких головок не является массовым явлением.
Существует еще один способ панорамной фотосъемки - применение отвеса, закрепленного на объективе. Но этому способу присущ ряд недостатков, которые являются критическими. Первый из них заключается в том, что нодальная точка находится внутри объектива, а отвес крепится снаружи, при наклоне камеры невозможно определить истинное положение нодальной точки. Второй недостаток: невозможно сохранять вертикальное положение камеры и, как следствие, невозможно обеспечить нормальное перекрытие между изображениями при сборке панорамы. С этой целью на камеру крепят жидкостный уровень, но это не может обеспечить постоянство угла наклона при многорядной панораме, т.к. уровень закреплен в одном положении. Так же невозможно обеспечить стабильное перекрытие по вертикальной стороне кадра. Фотографы пытаются при съемке серии кадров обеспечить перекрытие на глаз. В результате фотосъемка требует неимоверного напряжения и зачастую промахи замечают позже, когда материал уже отснят. Отснять серию изображений, предназначенных для сборки сферической панорамы, возможно только с большим напряжением и низкого качества, т.к. невозможно контролировать перекрытие, наклоны и точно позиционировать нодальную точку.
Задачей данного изобретения является создание способа и устройства для фотосъемки серий изображений, предназначенных для сборки панорам, свободных от недостатков, описанных выше и применяемых на практике устройств. Кроме того, простота способа и устройства позволяет его воспроизводить в домашних условиях или продавать промышленные изделия по крайне низкой цене, давая возможность многочисленным любителям приобщиться к этому виду искусства. Малый вес и компактность позволяют взять это устройство на прогулку или в командировку, а также использовать в тех местах, где съемка со штативом затруднительна. При этом с заявляемым устройством возможна качественная оперативная панорамная фотосъемка.
Данная задача достигается тем, что в основе способа и устройства на его основе применен метод отвеса с двумя нитями, которые образуют треугольник и позволяют легко ориентировать камеру в трехмерной системе координат.
Данная система отвеса показана на фиг.1.
Рассмотрим жесткий стержень АВ, в трехмерной системе координат с началом в точке О и осями X, Y, Z. К концам стержня в точках А и В прикреплены нити и груз. Система представляет собой двухнитевой отвес. Причем отвес закреплен так, как показано на фиг.1. При условии АА'=ВВ' отрезок АВ будет параллелен отрезку А'В'.
Если прикрепить к стержню АВ в точке N (AN=NB) нить, то стержень АВ будет всегда находиться в плоскости параллельной плоскости OXY.
При отклонении отрезка АВ от горизонтали возросшее натяжение одной из нитей возвращает систему в исходное состояние.
При повороте АВ вокруг оси Z отвес также будет поворачиваться вокруг этой оси.
Причем углы поворота отрезков АВ и А'В' будут идентичны.
Сориентировав отрезок АВ таким образом, чтобы отвес находился над точкой О можно однозначно определить положение точки N в трехмерной системе координат OXYZ. Усложним задачу - предположим, что в точке N закреплено материальное тело. Для точного определения положения этого материального тела в трехмерной системе координат потребуется определять угол поворота по осям Z и Y. Как было указано выше, двухнитевой отвес фиксирует поворот вокруг оси X, блокируя этим одну степень свободы вращения. Таким образом, удерживая отвес над точкой О и отслеживая углы вращения вокруг осей Z и Y, можно однозначно определить положение в трехмерном пространстве материального тела, закрепленного в точке N.
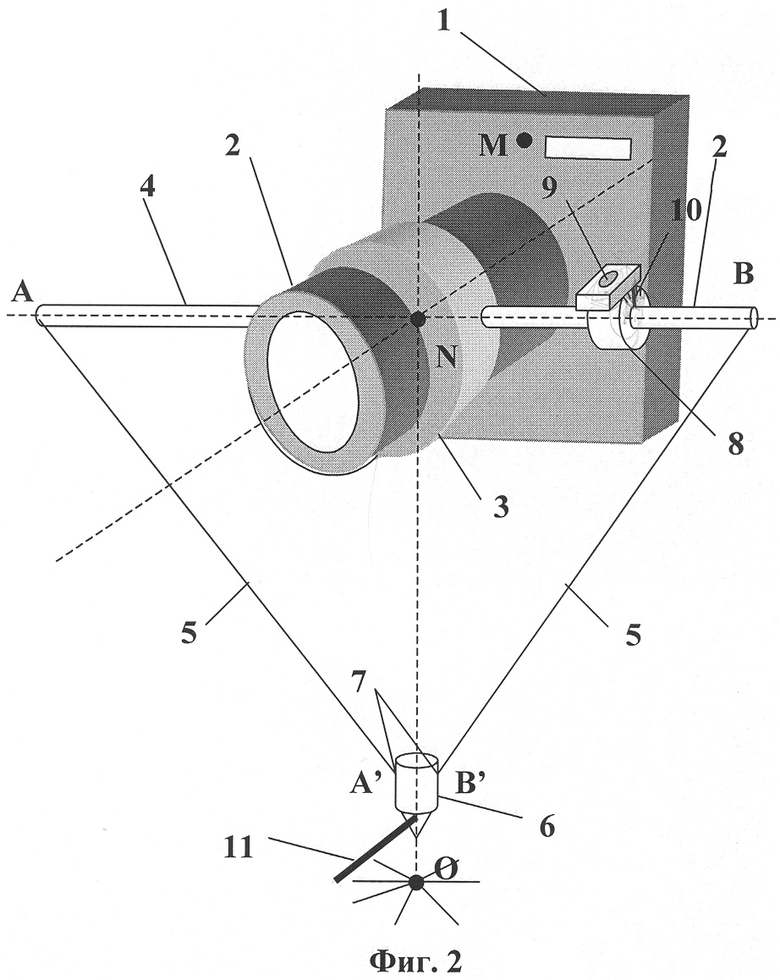
На основе данного метода реализовано устройство, конструкция которого показана на фиг.2.
На камеру (1) с объективом (2) в районе нодальной точки N крепится держатель объектива (3) с жестко прикрепленными стержнями (4). К концам стержней прикреплены нити равной длины (5). С противоположной стороны к нитям прикреплен отвес (6). Нити закрепляются к отвесу не в одной точке, а на небольшом удлинении, как показано фиг.2, согласно теоретическим обоснованиям, приведенным выше.
Стержни (4), нити (5) и отверстия (7) в отвесе (4) образуют трапецию, так как нодальная точка N находится на линии крепления стержней и точно в середине отрезка АВ (последнее условие легко реализуемо в связи с симметричной конструкцией всех объективов). Исходя из этого, позиционируя отвес в точке О, можно однозначно фиксировать положение нодальной точки N в пространстве.
Основание А'В' трапеции ABA'B' всегда будет параллельно линии АВ стержней (4). Это позволяет, укрепив на отвесе шайбу (8) с пузырьковым уровнем (9) и указателем (10), с достаточной точность отслеживать поворот камеры вокруг оси NO.
Для позиционирования камеры вокруг горизонтальной оси АВ используется жидкостный пузырьковый уровень (9), закрепленный на одном из стержней. Основой для крепления служит вращающаяся толстая шайба (8), закрепленная на одном из стержней (4) таким образом, что его можно вращать вокруг оси АВ. На одной стороне этой шайбы нанесена шкала. Согласно меткам, нанесенным на эту шкалу, определяется угол наклона камеры и отсчет производится относительно указателя (10), жестко связанного со стержнем.
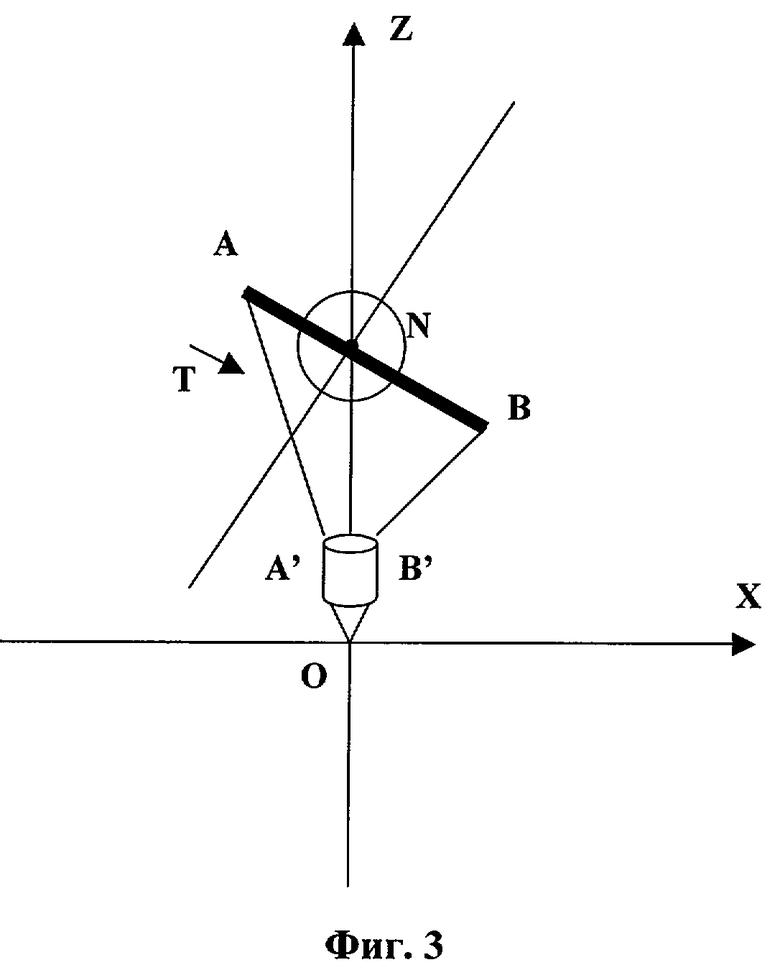
Удерживая камеру в точке М, легко позиционировать наклон камеры относительно линии горизонта. При наклоне камеры натяжение одной нити возрастает, а другой ослабляется.
В результате сила натяжения одной из нитей Т пытается вернуть отрезок АВ в горизонтальное положение, как показано на фиг.3.
В качестве оптимального варианта - изменения конструкции объектива в промышленных условиях. Расположив крепления для стержней на корпусе объектива, производитель значительно расширит возможности использования своего изделия.
Сущность способа проведения серий изображений, предназначенных для сборки панорам, состоит в следующем.
Устройство на объективе камеры закрепляется таким образом, чтобы ось стержней (4) проходила через нодальную точку. На поверхность, где стоит фотограф, кладут шаблон с отмеченной точкой позиционирования отвеса. Желательно заранее отметить место на поверхности, где будет находиться, эта точка. Это потребуется в том случае, если серия изображений предназначается для создания сферической панорамы. Убрав шаблон, по этой точке позиционируется отвес и производится съемка. Применение тонких капроновых нитей позволяет легко ретушировать снимок и избавиться от изображения нитей и отвеса в кадре. На твердых поверхностях лучше использовать гибкий шаблон, который легко сложить для транспортировки. При съемке на траве и других подобных поверхностях лучше использовать твердый шаблон из пластика, дерева, металла или других материалов.
Применяя заявляемое устройство можно производить фотосъемку стоя в воде. Для этих целей требуется утяжеленный шаблон из материала, тонущего в воде.
Укоротив нити, можно производить фотосъемку на небольшом расстоянии над столом или другой возвышенностью, что значительно расширяет творческие возможности фотографа.
На шаблоне размечены отметки, позволяющие контролировать поворот камеры вокруг вертикальной оси. Градуировка производится для требуемого перекрытия кадров. Если используется несколько объективов или объектив с переменным фокусным расстоянием, то наносится несколько шкал. В этом случае для удобства лучше сделать цветные шкалы или использовать несколько шаблонов. Для удобства отметки пронумерованы. В этом случае очень просто получить необходимую последовательность изображений. Так же перед началом фотосъемки необходимо калибровать шкалу на барабане (8). Градуировку лучше сделать заранее с использованием штатива. При многорядной съемке учитывается угол перекрытия изображений между рядами. Для этого жестко устанавливается камера под требуемым углом, и вращающийся барабан ориентируется таким образом, чтобы пузырек уровня (9) занял отмеченное положение, и напротив указателя (10) ставится метка соответственно углу наклона камеры. При использовании нескольких объективов с различными фокусными расстояниями или объектива с переменным фокусным расстоянием потребуется использование нескольких шкал, если таких много, то возможно использование сменных шкал.
Съемка производится следующим образом. Удерживая камеру таким образом, чтобы основное усилие прикладывалось к точке М, другой рукой слегка подправляется положение камеры. В этом случае система отвесов устанавливает камеру в вертикальное положение. Обычно съемка изображений для сборки панорам производится в положении «портрет», именно в таком положении изображена камера на фиг.2.
Для использования камеры в положении «пейзаж» ориентируем отвес по точке О. Затем производится ориентация указателя отвеса (11) на начальную отметку съемки и ориентация угла наклона камеры по шкале на вращающемся барабане (8). Для этого указатель барабана (10) устанавливается на отметку угла наклона для требуемого ряда. Изменяется наклон камеры таким образом, чтобы пузырек занял отмеченную позицию. Камера устанавливается под нужным углом наклона в горизонтальной плоскости вращения. Перед нажатием на кнопку спуска затвора камеры еще раз контролируется положение отвеса (6) и указателя отвеса (11). Затем производится съемка.
Важно отметить, что при использовании данного устройства отпадает необходимость контролировать кадрирование по видоискателю (как в системе с однонитевым отвесом), а становится возможным сосредоточить внимание на отметках поворота, высоты точки фотосъемки и уровне наклона по горизонтали. При многорядной съемке, завершив цикл вращения вокруг вертикальной оси, шайба (8) переводится на следующую отметку и повторяется серия фотосъемки вокруг вертикальной оси.
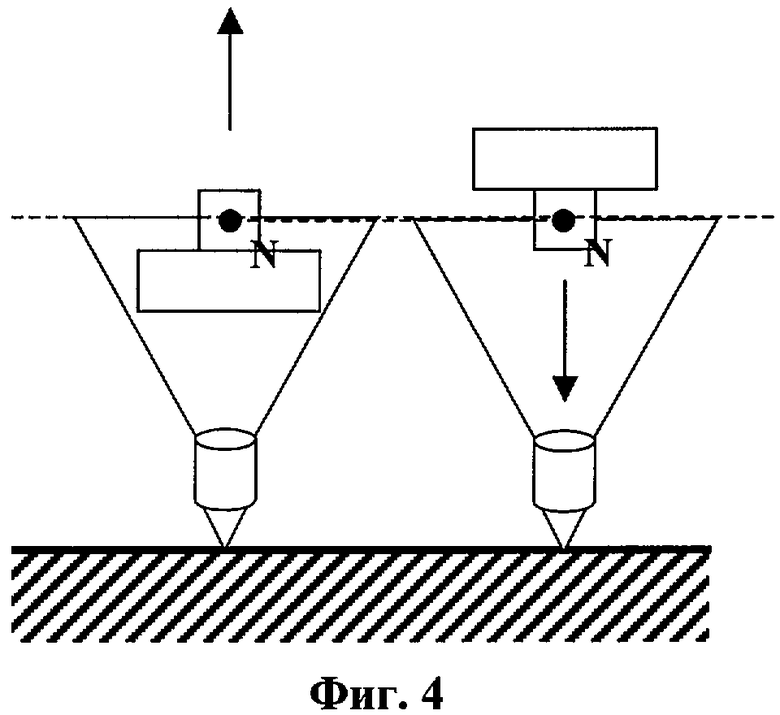
Данное устройство позволяет легко сделать снимки надира и зенита. Процесс съемки в этих положениях показан на фиг.4. Стрелками указано направление фотосъемки. Двухнитевая конструкция отвеса позволяет удобно ориентировать камеру при угле вращения вокруг оси АВ.
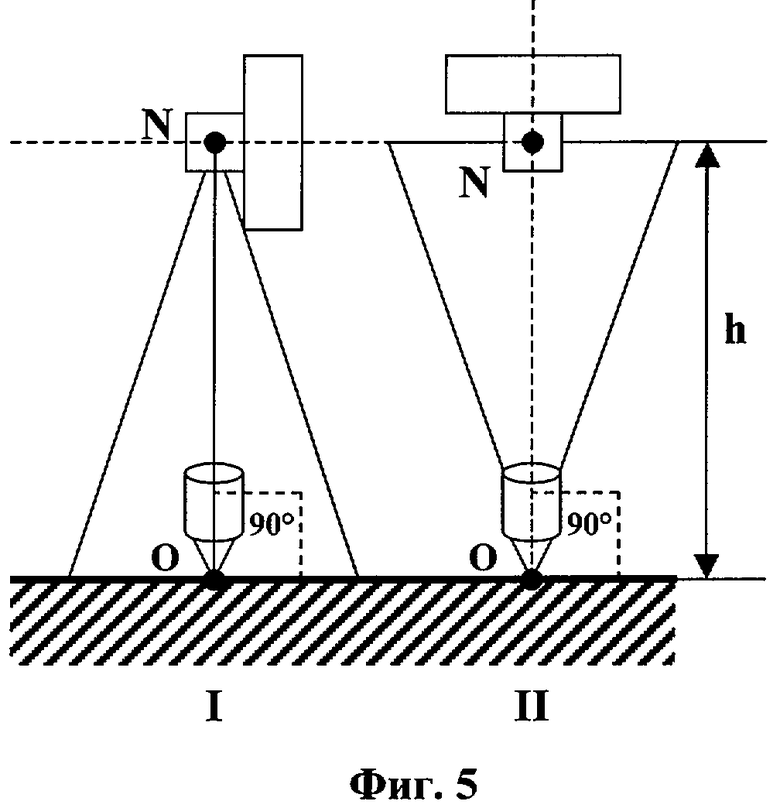
Возможность производить фотосъемку поверхности, на которой стоит фотограф, с минимумом артефактов в кадре (тонкие нити и верхняя часть груза) позволяет применить данное устройство совместно с панорамной головкой для фотосъемки нижней части сферы. Части сферы, за исключением нижней части, снимают с применением штатива и панорамной головки, положение I на фиг.5. Но штатив не позволяет снимать низ. В кадре будут видны ножки штатива. С помощью отвеса или другим способом измеряется высота h - расстояние от нодальной точки до поверхности. Причем для съемки в положении II нити отвеса устройства должны иметь такую длину, чтобы расстояние от нодальной точки до поверхности было, как и в случае I равно h.
В положении I отмечается точка под штативом, скажем О, когда штатив уберут, для съемки в положении II отвес выставляют по этой же точке О. В результате нодальная точка камеры окажется в той же точке пространства, что и в случае съемки в положении I.
Пример из реально собранной панорамы показан фиг.6.
В поле кадра нити обрываются, так как их концы перекрыты другими изображениями.
Таким простым способом точно сделать снимок нижней части сферической панорамы было невозможно.
Для испытаний и проверки технических возможностей данного устройства был изготовлен опытный экспериментальный образец. Общий вид собранного устройства показан на фиг.7.
Для изготовления прототипа этого устройства были применены две половинки держателя для труб. Резиновая прокладка предохраняет объектив от повреждений и отлично фиксирует устройство. Расстояние между точками крепления нитей отвеса в данном образце составило 250 мм. При экспериментах использовалась камера Canon 10D с объективом ЗЕНИТАР-16М. Вес камеры с объективом около 1 килограмма. Используемый груз отвеса составлял 600 грамм. Это позволяло легко удерживать стержни в горизонтальном положении. При меньшем весе камеры можно использовать грузы меньшей массы.
В качестве датчика угла наклона камеры использовалась шайба из плексигласа (толщина 10 мм), обточенная с помощью бытовой электродрели со сточенным краем, в которую с помощью термоклея был закреплен жидкостный пузырьковый уровень. Указатели для определения углов наклона и поворота камеры были изготовлены из обычной проволоки. Следует отметить, что для практического применения, указатель отвеса (11) (фиг.2) лучше изготовить откидным, как показано на фиг.8.
Одно положение указателя отвеса будет в положении для транспортировки, другое - рабочее. Шкала указателя наклона камеры - шайба (8) с уровнем (9) на фиг.2 была проградуирована на три ряда для съемки сферической панорамы. При использовании данных объективов и камеры для перекрытия угла обзора по горизонту 180° требовалось 8 кадров. Камера использовалась в положении «портрет».
Так как в данных условиях (кроп-фактор 1,6) объектив ЗЕНИТАР-16М обеспечивает угол обзора по малой стороне кадра 54°, то перекрытие соседних кадров составило (54°×8-360°)/8=9°.
Это составляет около 16%. Таким образом, для получения сферической панорамы было решено произвести съемку двух замкнутых рядов изображений и изображения пола, всего 8+8+1 снимок.
Результат сборки панорамного изображения превзошел все ожидания. На такой большой серии изображений было получено стабильное перекрытие соседних изображений и практически отсутствовал параллакс.
Впоследствии при съемках в помещении, когда на камеру была установлена вспышка, оказалось, что вес вспышки сильно затрудняет удержание камеры в требуемом положении. Но серию кадров удалось сделать до конца и получить хороший результат. Как вариант решения этой проблемы предлагается использование внешней вспышки управляемой через кабель или ИК-передатчик. Практически все современные камеры обладают этой возможностью.
Для удобства крепление нити отвеса к стержням, желательно использовать зажимы. Например, винтовые, как показано на фиг.9. Зажим для нити может быть любого типа. При экспериментах хорошо зарекомендовала себя обычная резиновая трубочка (12), обеспечивающая простоту и легкость управления длиной нити.
Это значительно облегчает регулировку длины нити, в зависимости от роста фотографа, или в случае фотосъемки возвышенных поверхностей, например над поверхностью стола. Для регулировки равенства длины нитей удобно использовать груз с двумя перпендикулярными отверстиями, в одном из которых расположен фиксатор, например, винтовой, а через другие свободно проходят нити отвеса. Конструкцию такого отвеса отображена на фиг.10, где 13 - фиксатор нити отвеса.
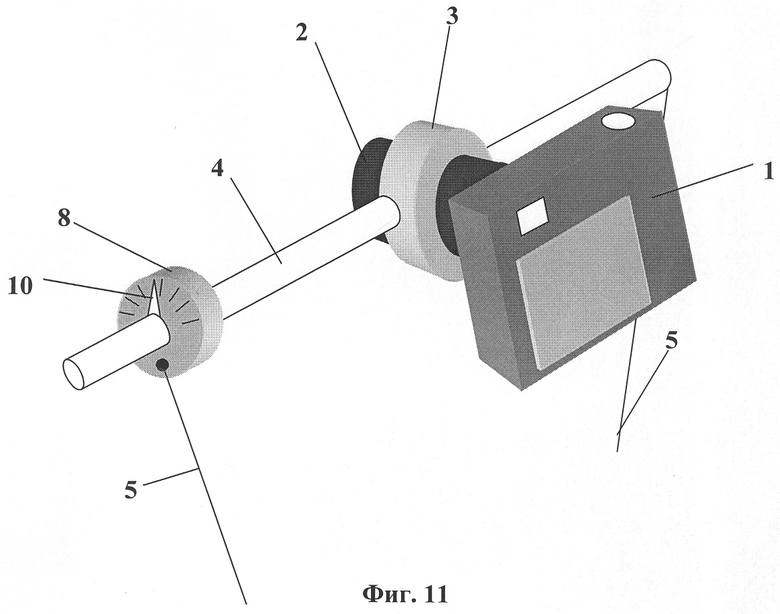
Для контроля угла наклона камеры помимо крепления уровня (9) также может быть использован вариант крепления одной из нитей к подвижной шайбе (8) со шкалой (фиг.11). Визир шкалы жестко связан со стержнем. При наклонах цилиндр остается неподвижным, его положение на оси вращения зафиксировано нитью с отвесом, а указатель (10) перемещается вместе с вращающимся стержнем.
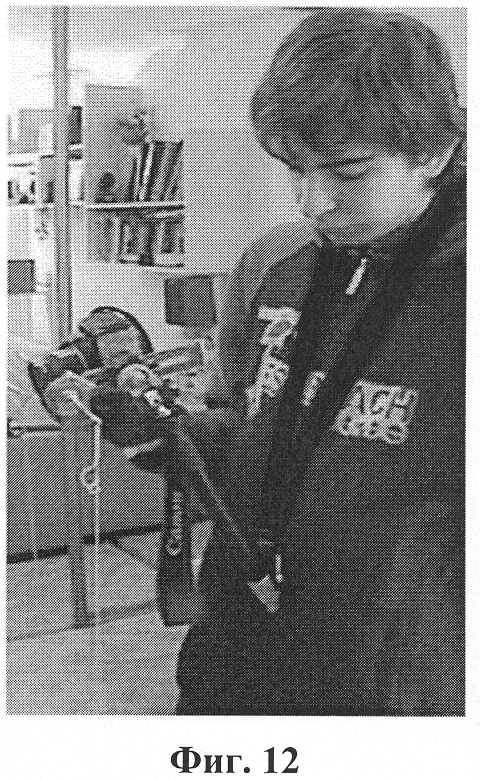
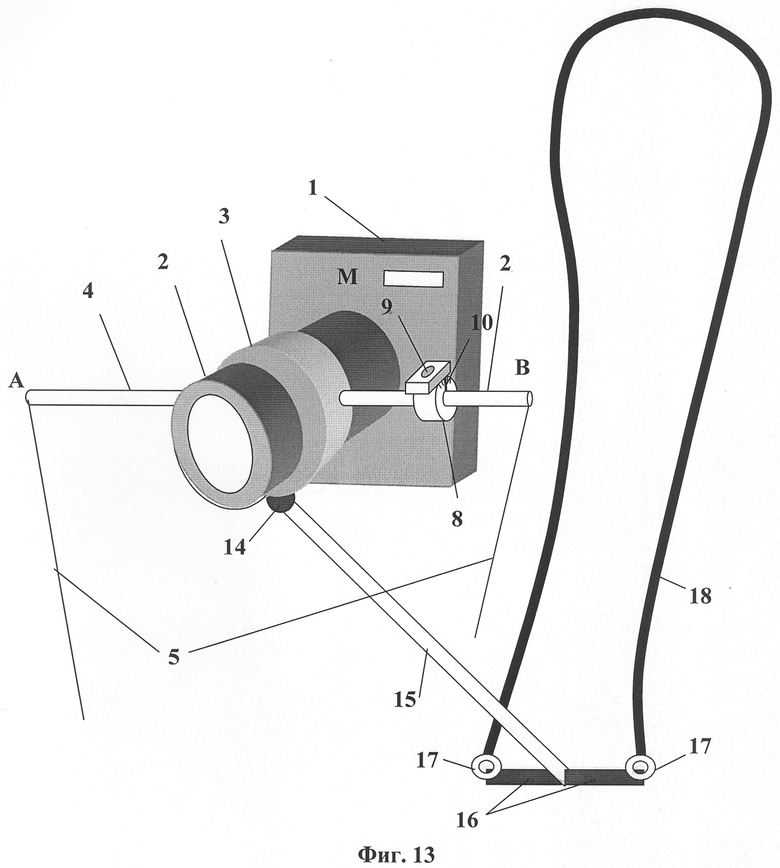
При весе камеры более килограмма руки фотографа находятся в большом напряжении. Причем требуется постоянно контролировать три параметра: поворот, наклон, высота. Для снижения физической нагрузки предлагается использовать шейный штатив (общий вид в действии показан на фиг.12) с упором на брючном ремне одной стороной и небольшой сферической головкой на другом конце штатива. Это головка (14) закрепляется снизу держателя объектива (3), как показано на фиг.13. От места крепления головки (14) до упора (16) размещается жесткий шейный штатив (15). К концам упора (16) за крепления (17) зацеплены концы ремня (18), который навешивается на шею пользователя.
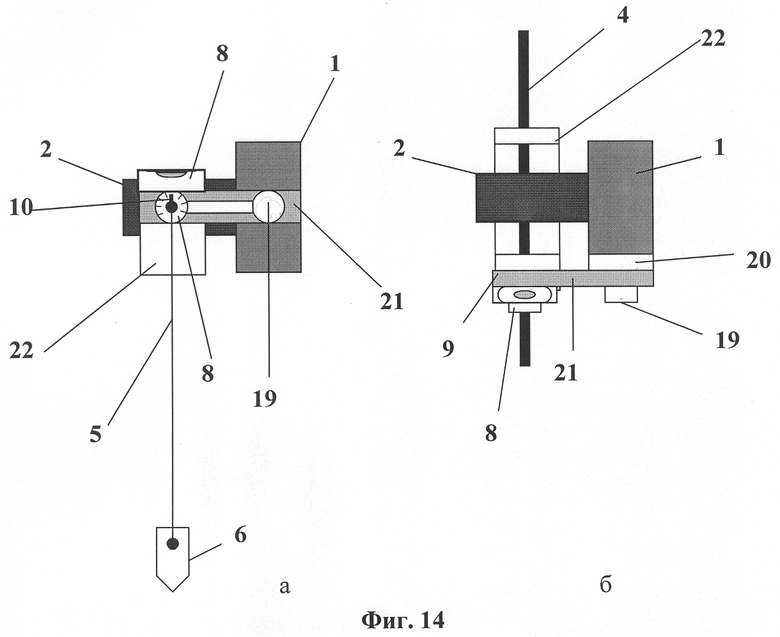
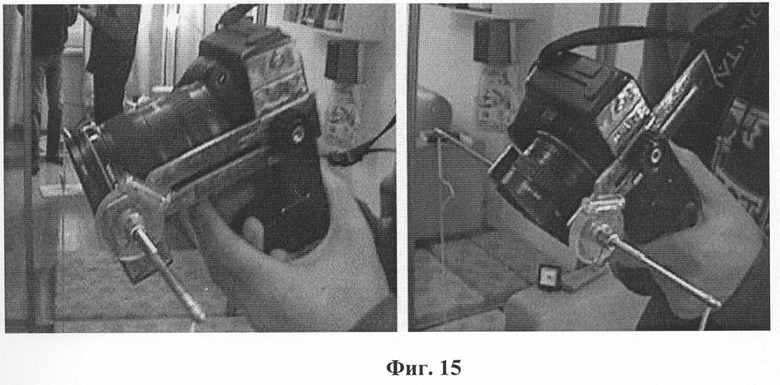
Для решения проблем, связанных с применением объективов типа «рыбий глаз», у которых передняя линза зачастую большего диаметра и объектив в этом случае имеет форму конуса, а также для универсальности с использованием разных объективов и объективов с переменным фокусным расстоянием предлагается реализация устройства с креплением к камере подвижной планки.
На фиг.14 показан вид такой камеры сбоку (а) и сверху (б). Камера (1) имеет сменные объективы (2). Посредством винта (19) к стандартному креплению на нижней части камеры крепится башмак (20), имеющий направляющую (21), по которой перемещается кронштейн, с закрепленным на нем П-образной скобой (22) со стержнями. Размер скобы подобран таким образом, что ось стержней проходит через главную оптическую ось системы камера-объектив.
Направляющая (21) перемещается в прорези башмака (20). Таким образом, можно подстраивать положение оси стержней вдоль оптической оси объектива. В результате получается универсальное устройство, ограниченное типом камеры. Общий вид в действии такого устройства показан на фиг.15.
Хотя настоящее изобретение было описано с выделением предпочтительных вариантов осуществления, специалистам в данной области техники ясно, что настоящее изобретение не ограничивается вариантами осуществления, описанными и проиллюстрированными выше. Различные варианты осуществления и адаптации, помимо показанных и описанных здесь, а также многие вариации, модификации и эквивалентные устройства ясно следуют из приведенного выше описания и чертежей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проведения технологических работ по обслуживанию газотурбинного двигателя | 2024 |
|
RU2829971C1 |
| СПОСОБ ПАНОРАМНОЙ СЪЕМКИ | 2024 |
|
RU2831510C1 |
| Устройство для геодезических фотосъемок | 1930 |
|
SU22918A1 |
| Способ развертки орбитальных панорам | 1977 |
|
SU678292A1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО ПОСТРОЕНИЯ ВИРТУАЛЬНОЙ 3D-СЦЕНЫ НА ОСНОВАНИИ ДВУМЕРНЫХ СФЕРИЧЕСКИХ ФОТОПАНОРАМ | 2024 |
|
RU2826369C1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОТО- ИЛИ ВИДЕОИЗОБРАЖЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ОБЪЕКТА СЪЕМКИ | 2015 |
|
RU2671551C2 |
| СПОСОБ КОНТРОЛЯ ИЗМЕНЕНИЙ ДЕФЕКТОВ КОЖИ ЛИЦА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2618980C1 |
| Фотографическая камера для панорамной съемки | 1930 |
|
SU24229A1 |
| УСТРОЙСТВО ДЛЯ СЪЕМКИ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2612363C2 |
| Способ получения непрерывного стереоизображения земной поверхности с движущегося носителя | 2018 |
|
RU2686513C1 |

Способ панорамной фотосъемки характеризуется тем, что съемку производят позиционируя камеру с объективом таким образом, что обеспечиваются условие поворота оптической системы вокруг нодальной точки, расположенной на главной оси объектива и находящейся внутри системы линз, условие постоянства угла наклона и постоянства угла поворота камеры, условие сохранения положения нодальной точки объектива относительно точки съемки. При этом на камеру с объективом крепят держатель объектива с жестко прикрепленными к нему стержнями, расположенными на горизонтальной оси и перпендикулярно оси объектива. К концам стержней прикрепляют нити и груз так, что эта система представляет собой двухнитевой отвес. Камеру с объективом закрепляют таким образом, чтобы ось стержней проходила через нодальную точку, а для позиционирования камеры вокруг горизонтальной оси используют закрепленный с помощью вращающейся вокруг горизонтальной оси шайбы на одном из стержней жидкостный пузырьковый уровень. Угол наклона камеры определяют согласно меткам, нанесенным на шкалу шайбы, и относительно указателя, жестко связанного со стержнем. Для получения изображений сферической панорамы на поверхность, где стоит фотограф, кладут шаблон с отмеченной точкой позиционирования отвеса, после чего убирается шаблон, и по этой точке позиционируется отвес, и производят съемку. Кроме того, используют шейный штатив с упором на брючном ремне одной стороной и небольшой сферической головкой на другом конце штатива, причем головка закрепляется снизу держателя объектива, а к концам упора зацеплены концы ремня, который навешивают на шею пользователя во время съемки. Отвес содержит указатель, который выполняется откидным, причем одно положение указателя отвеса - положение для транспортировки, другое - рабочее. На одном из стержней закреплена вращающаяся вокруг горизонтальной оси толстая шайба, к которой крепится одна из нитей двухнитевого отвеса, причем на одной стороне этой шайбы нанесена шкала, а указатель шкалы жестко связан со стрежнем. На одном из стержней закреплен с помощью вращающейся вокруг горизонтальной оси толстой шайбы жидкостный пузырьковый уровень. Технический результат - повышение качества изображений. 2 н. и 8 з.п. ф-лы, 15 ил.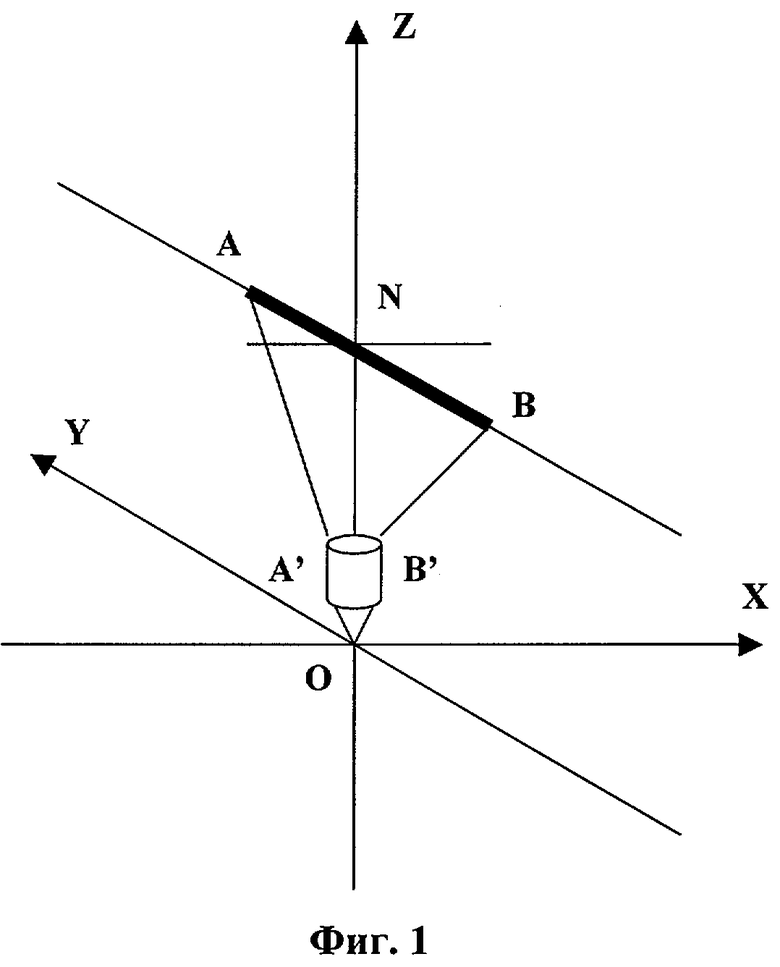
| Панорамная фотографическая камера | 1944 |
|
SU67844A1 |
| Фотоаппарат для панорамирования | 1950 |
|
SU91841A1 |
| US 4864335, 05.09.1989 | |||
| Оптическая система для панорамной кинофотосъемки | 1957 |
|
SU117027A1 |
| КАМЕРА ДЛЯ ПАНОРАМНОЙ ФОТОСЪЕМКИ | 1998 |
|
RU2127443C1 |
| Способ бесфлюсовой пайки деталей из алюминия или покрытых слоем алюминия | 1987 |
|
SU1530360A1 |
| US 5021813, 04.06.1991. | |||

