Область техники, к которой относится изобретение
Настоящее изобретение предназначено для определения и анализа фрагментации объемного гранулометрического состава фракций поверхности горной массы, образуемой, например, в результате буровзрывных работ в карьерах горнодобывающих предприятий. В частности настоящее изобретение относится к способу определения гранулометрического объемного состава фракций горной массы и к устройству для определения гранулометрического объемного состава фракций горной массы.
Требования безопасности в карьере запрещают приближение к борту карьера на близкое расстояние, поэтому требуется определять размеры фрагментов горной породы с безопасного расстояния. Рабочий диапазон расстояний для стереосъемки составляет от 3 до 30 м.
Разработанное устройство для определения гранулометрического объемного состава фракций горной массы является переносным портативным устройством с автономным электропитанием, работающим в режиме «офлайн» без Интернета, и в рамках осуществления способа определения гранулометрического объемного состава фракций горной массы обладает следующими функциями:
• фотосъемка поверхности горной массы непосредственно в карьере с привязкой стереоснимков к точке геолокации;
• автоматическое выявление на полученных при съемке изображениях отдельных сегментов с использованием нейросетевых алгоритмов и классификация всех сегментов по типам: пустота, мелкая/ средняя/крупная фракция, фрагменты породы;
• расчет объемов всех фрагментов горной породы на стереоснимке и расчет объема мелкой/средней/крупной фракции, исходя из выявленных на снимке сегментов;
• анализ фрагментации объемного гранулометрического состава фракций поверхности горной массы непосредственно на самом устройстве, без необходимости подключения к удаленным вычислительным и облачным ресурсам (режим «офлайн»).
Устройство для определения фрагментации гранулометрического объемного состава фракций горной массы в автоматическом режиме определяет расстояния до снимаемых фрагментов и в соответствии с расстояниями эффективно вычисляет их фактические линейные размеры.
Устройство для определения фрагментации гранулометрического объемного состава фракций горной массы проводит автоматическую гранулометрическую сегментацию для выделения отдельных цельных фрагментов (кусков) горной массы и выполняет автоматическую классификацию выделенных сегментов по следующим типам:
• цельные куски горной массы;
• области «мелочи» – состоящие из мелких частиц, размерами ниже возможности разрешения камер выделять их в отдельные сегменты;
• области «пустот» – области, которые из-за условий недостаточного освещения невозможно визуально или в автоматическом режиме классифицировать по типу фрагментов, а также области, в которых находятся инородные предметы, не подлежащие учету в расчете фракционного гранулометрического состава.
Устройство для определения фрагментации гранулометрического объемного состава фракций горной массы обеспечивает анализ фрагментации гранулометрического состава с минимально необходимым линейным размером измеряемых частиц на площади поверхности горной массы. Устройство определяет минимальный линейный размер куска от 1 см на расстоянии 10 м. Проведение анализа занимает не более 30 секунд с момента съемки.
Результаты анализа отображаются на экране устройства, в частности, в виде графика распределения объемов содержания частиц в зависимости от их линейных размеров, и/или в виде гистограммы, отражающей максимальные размеры кусков для интервалов размерных фракций. Интервал размеров всех частиц анализируемого вещества подразделяют на классы (фракции) и гранулометрический состав представляют, в частности, в виде процентного объемного содержания частиц каждой из фракций (фракционный состав).
Результаты анализа оформляются, в частности, в виде отчета, который можно отправить по электронной почте и/или перенести на персональный компьютер (ПК). Анализ фрагментации гранулометрического состава производится в автоматическом режиме, без необходимости применения эталонов при съемке.
Уровень техники
Из уровня техники известен способ определения фрагментации гранулометрического состава развала горной массы [RU 2388998, дата публикации: 20.10.2009 г.]. При выполнении способа в любом доступном месте укладывают произвольно ориентируемый масштабирующий прямоугольник с произвольно выбранными длинами сторон, фотографируют развал горной массы под любым углом, фотопланограмму вводят в компьютер, на ней формируют четырехугольный расчетный контур произвольного размера и положения, оконтуривают площади кусков горной массы, задают классы крупности в пределах расчетного контура, и с использованием компьютерной программы рассчитывают гранулометрический состав раздробленной горной массы путем отнесения площадей оконтуренных кусков горной массы к площади расчетного контура.
Недостатком известного технического решения является низкая безопасность, большое количество затрачиваемого времени и очень низкая точность определения фрагментации гранулометрического состава развала горной массы из-за необходимости применения в процессе фотосъемки масштабирующего прямоугольника, малоэффективного при малых углах наклона развала ввиду протяжённости сцены фотосъёмки в перспективу, а также необходимости нахождения персонала в опасных зонах развалов при размещении масштабирующего прямоугольника, что существенно снижает технологичность способа.
Раскрытие изобретения
Задачей настоящего изобретения является устранение вышеуказанных недостатков уровня техники. А именно, задачей настоящего изобретения является создание нового, безопасного, быстрого, точного, надежного переносного портативного устройства с автономным электропитанием для определения фрагментации гранулометрического объемного состава фракций горной массы и способа на его основе, способного работать высокоэффективно без доступа в Интернет (в режиме «офлайн»).
Технический результат от использования настоящего изобретения заключается:
1) в повышении безопасности выполнения работ по результатам буровзрывных работ по анализу фрагментации гранулометрического состава в карьерах горнодобывающих предприятий;
2) в повышении точности и надежности и автоматизации определения и анализа фрагментации объемного гранулометрического состава фракций поверхности горной массы;
3) в увеличении скорости определения и анализа фрагментации объемного гранулометрического состава фракций поверхности горной массы;
4) в упрощении определения и анализа фрагментации объемного гранулометрического состава фракций поверхности горной массы за счет использования переносного портативного устройства;
5) в расширении арсенала технических средств при определении и анализе фрагментации объемного гранулометрического состава фракций поверхности горной массы;
6) в повышении уровня безопасности получаемой и анализируемой информации на переносном инновационном высокотехнолгичном устройстве, так как вся технология на основе нейросетей искусственного интеллекта работает высокоэффективно БЕЗ ИНТЕРНЕТА в режиме «офлайн».
Вышеуказанный технический результат достигается за счет способа определения фрагментации гранулометрического объемного состава фракций горной массы, включающий следующие этапы: осуществление стереосъемки и формирование стереоизображения; обработка изображения с определением сегментов горной породы; формирование карты глубин стереоизображения; расчет линейных размеров сегментов с учетом полученных данных карты глубин; расчет объемов сегментов в области анализа фрагментации гранулометрического состава; формирование фракционного гранулометрического анализа на основе вычисленных объемов сегментов и их линейных размеров; и вывод фракционного гранулометрического анализа на экран переносного портативного устройства.
Согласно настоящему изобретению на этапе осуществления съемки и формирования стереоизображения используют две стереокамеры, левую и правую, кадры с левой и правой стереокамер захватываются синхронно в момент съемки, для обоих кадров выполняется коррекция геометрических искажений и коррекция взаимного положения стереокамер.
Согласно настоящему изобретению после этапа осуществления съемки и формирования стереоизображения могут дополнительно выполнять определение и корректировку области анализа.
Согласно настоящему изобретению на этапе обработки изображения с определением сегментов осуществляют обработку исходного изображения с использованием трех нейросетевых моделей: модели для выделения областей с пустотами, модели для выделения областей мелкой фракции и модели для выделения фрагментов породы, а также выполняют классификацию сегментов по типам: пустота, мелкая/средняя/крупная фракция, фрагмент породы.
Согласно настоящему изобретению, пользователи могут дополнительно выполнять необходимую ручную корректировку сегментов.
Согласно настоящему изобретению, этап формирования карты глубин стереоизображения осуществляют посредством трех модулей: оценке совпадения, оценке направлений и постобработки.
Согласно настоящему изобретению на этапе расчета линейных размеров сегмента линейный размер сегмента вычисляется как расстояние между двумя максимально друг от друга удаленными точками сегмента, при этом расчет расстояния осуществляется в трехмерном пространстве с учетом информации из карты глубины.
Таким образом, для достижения вышеуказанного технического результата предложено устройство для определения фрагментации гранулометрического объемного состава фракций горной массы, включающее основной модуль, содержащий видеопроцессор 2D-операций, 3D-ускоритель, внутреннюю память, дисплей, подсистему питания, внешнее хранилище данных, группу датчиков, левую и правую стереокамеры и выполненное с возможностью использования нейросетевых алгоритмов.
Согласно настоящему инновационному высокотехнологичному изобретению, устройство также может дополнительно содержать звуковую систему и модуль связи.
Краткое описание чертежей
Настоящее изобретение поясняется следующими фигурами чертежей.
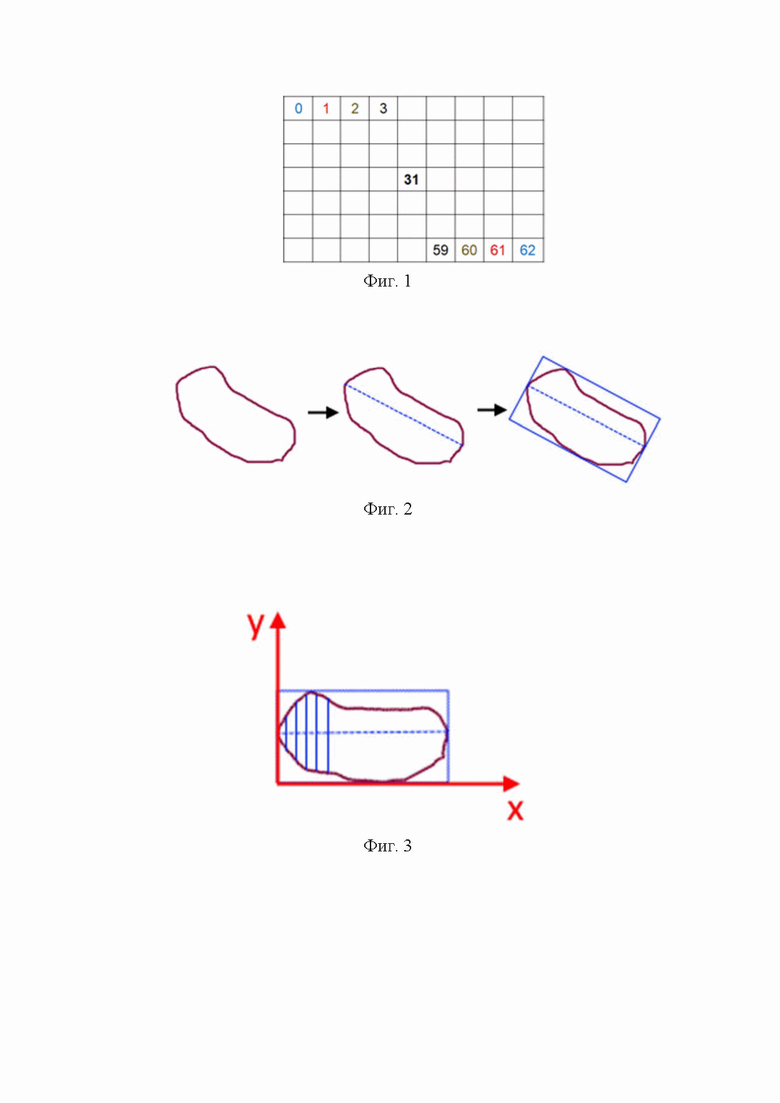
На Фиг. 1 представлено сравнение пикселей при центрально-симметричном преобразовании левого и правого изображений при оценке совпадения в рамках реализации алгоритма полуглобального матчинга (этап формирование карты глубин изображения);
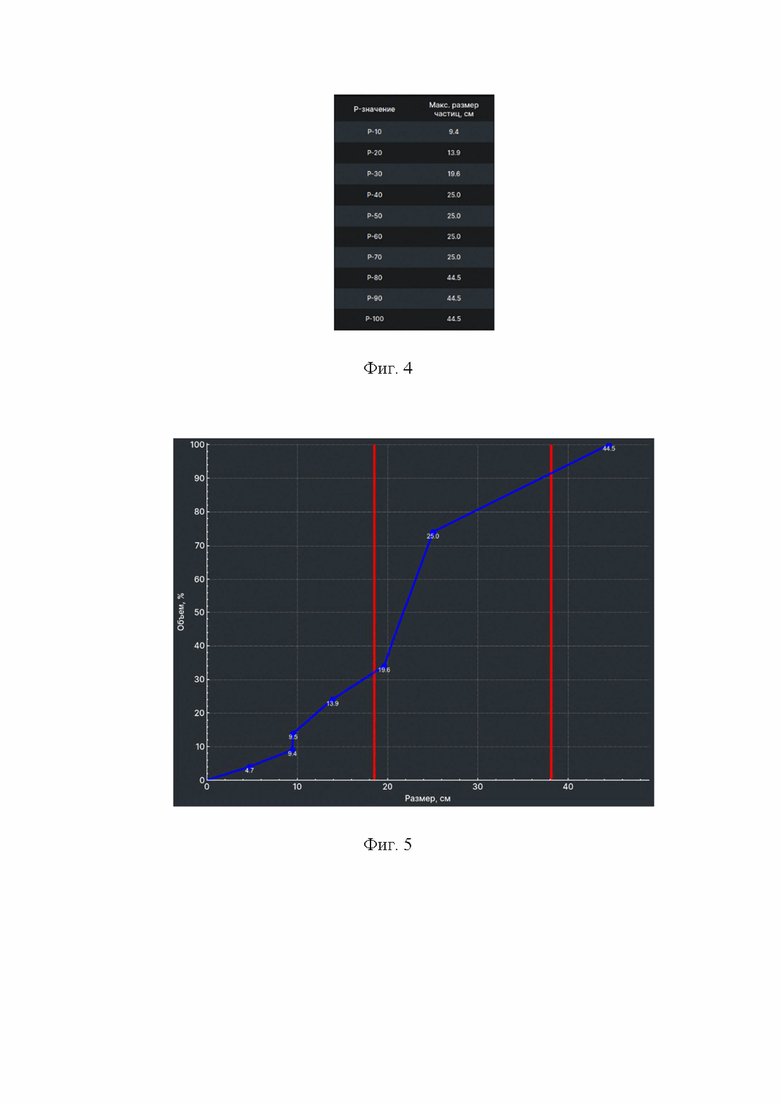
На Фиг. 2 показаны сегмент, его максимальная длина, ограничивающий прямоугольник (этапе определения линейных размеров сегментов);
На Фиг. 3 продемонстрировано разделение сегмента на полосы для расчета объема (этап расчета объемов сегмента);
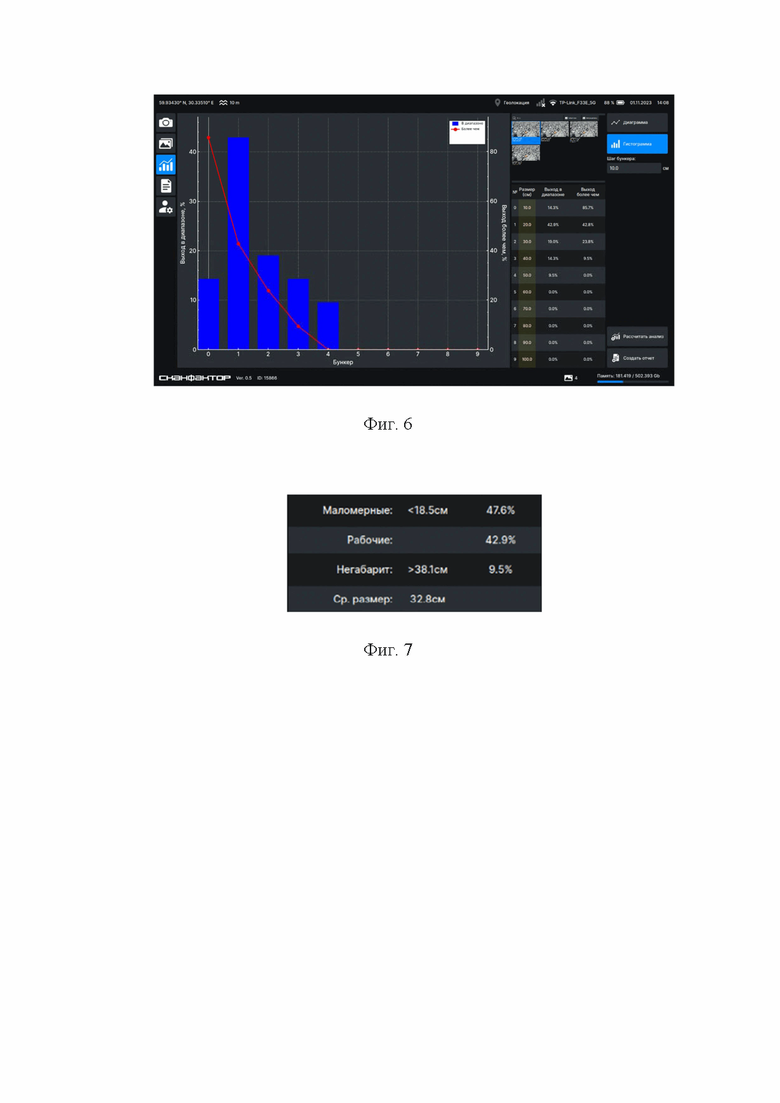
На Фиг. 4 представлено табличное представление результатов фрагментации гранулометрического анализа;
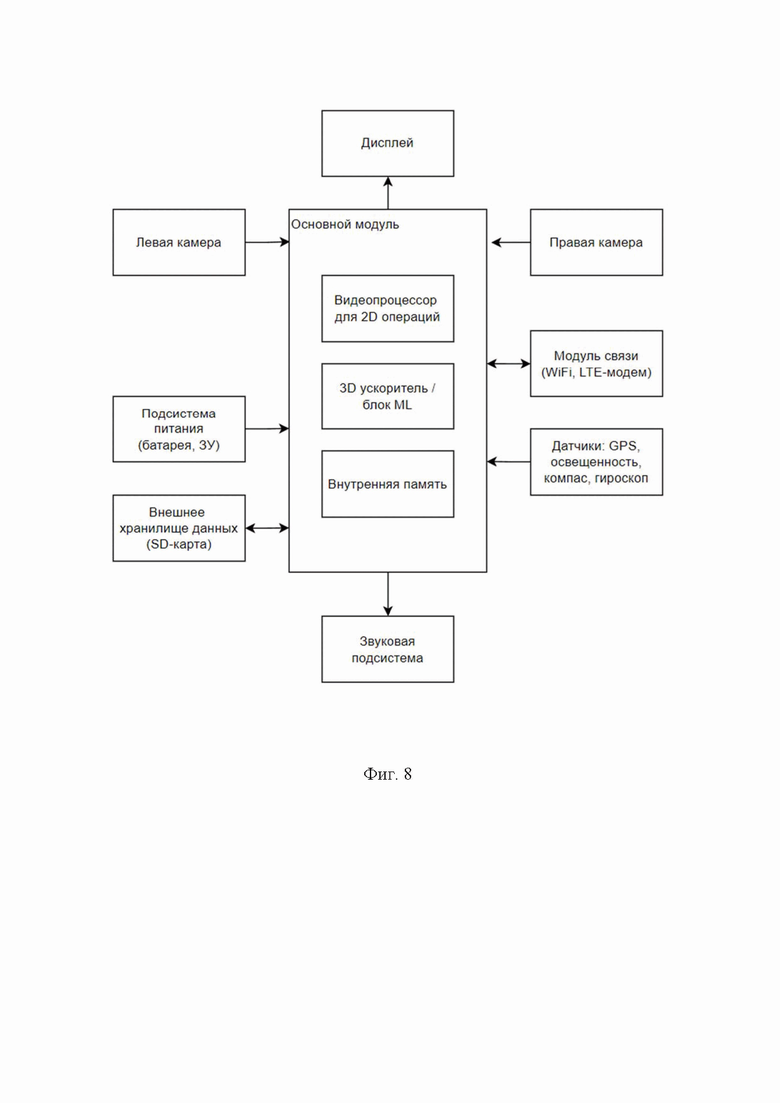
На Фиг. 5 представлено графическое отображение результатов фрагментации гранулометрического анализа;
На Фиг. 6 представлены результаты фрагментации гранулометрического анализа в виде гистограммы;
На Фиг. 7 представлено отображение вспомогательной таблицы общего распределения фрагментации гранулометрического состава;
На Фиг. 8 представлена архитектура аппаратной части заявленного портативного устройства;
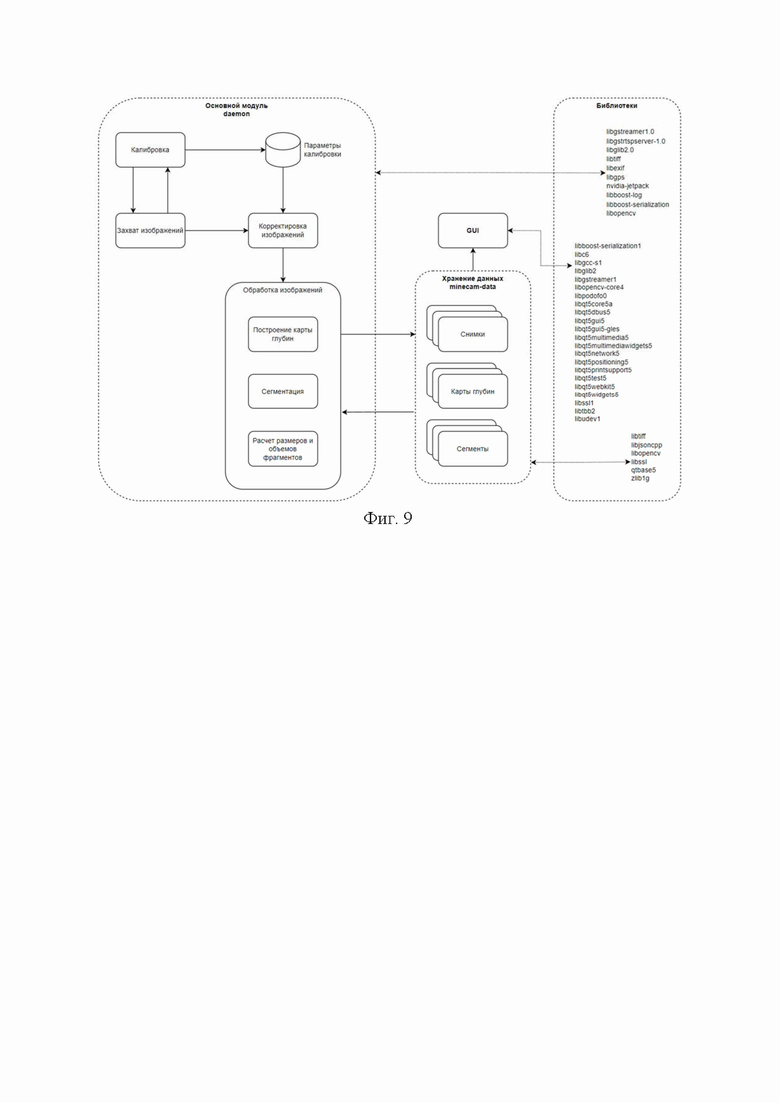
На Фиг. 9 представлена архитектура программного обеспечения заявленного портативного устройства.
Осуществление изобретения
Способ определения фрагментации гранулометрического объемного состава фракций горной массы согласно настоящему изобретению в наиболее общем виде, содержит следующие этапы, часть из которых не являются обязательными.
Порядок работы устройства состоит из следующих действий:
1. Съемка и формирование стереоизображения.
2. Определение и корректировка области анализа.
3. Обработка изображения с определением сегментов.
4. Возможная ручная корректировка сегментов.
5. Формирование карты глубин стереоизображения.
6. Расчет линейных размеров сегментов с учетом данных карты глубин.
7. Расчет объемов сегментов (фрагментов) в области анализа.
8. Формирование фракционного гранулометрического анализа на основе вычисленных объемов сегментов и их линейных размеров.
9. Вывод фракционного гранулометрического анализа в виде графиков и таблиц на экран устройств и в форме отчетов.
10. Передача отчетов по электронной почте, на внешние носители или на ПК.
11. Непосредственный анализ полученных данных пользователем с последующей оптимизацией процессов буровзрывных работ.
Этап съемки и формирования стереоизображения.
Изображение формируется по следующим шагам:
1. Оператор, ориентируясь на изображение с левой камеры устройства определения фрагментации гранулометрического объемного состава фракций горной массы, выбирает ракурс и выполняет съемку.
2. Кадры с левой и правой стереокамер захватываются синхронно в момент съемки.
3. Для обоих кадров выполняется коррекция геометрических искажений и коррекция взаимного положения стереокамер.
4. По кадрам с левой и правой стереокамер строится карта глубины изображения, которая используется в дальнейшем при расчете линейных размеров, расстояний и объема сегментов.
5. Оператор может производить корректировку области анализа на отображаемом на дисплее устройства изображении.
6. Далее левый кадр передается в модуль МЛ (ML – Machine Learning) для выделения сегментов.
Для построения карты глубин используется один из алгоритмов, относящихся к алгоритмам полуглобального матчинга, например, алгоритм SGBM (Semi-Global Block Matching).
Такой алгоритм обрабатывает изображения с левой и правой стереокамер (после коррекции искажений).
Реализация такого алгоритма состоит из трех основных модулей: оценка совпадения, оценка направлений и постобработка.
При оценке совпадения расчет выполняется в два этапа: центрально-симметричное преобразование (Center-Symmetric Census Transform – CSCT) левого и правого изображений и вычисление расстояния Хэмминга. Сначала алгоритм выполняет расчет величины CSCT для всех пикселей левого и правого изображений раздельно, используя скользящее окно. Для текущего пикселя вокруг него выбирается окно размером 9 на 7 пикселей. Величина CSCT для центрального пикселя в этом окне оценивается путем сравнения значения каждого пикселя с его соответствующим центрально-симметричным аналогом в окне. Если значение пикселя больше, чем соответствующий центрально-симметричный пиксель, результат равен 1, в противном случае результат равен 0. На Фиг.1 показан пример окна размером 9 на 7. Номер центрального пикселя равен 31. 0-й пиксель сравнивается с 62-м пикселем (синий), 1-й пиксель сравнивается с 61-м пикселем (красный) и т.д., чтобы получить 31 результат. Каждый результат выводится в виде одного бита, а результат всего окна оформляется как 31-битное число. Это 31-битное число представляет собой выходные данные CSCT для каждого пикселя в обоих изображениях.
На следующем этапе (вычисление расстояния Хэмминга) определяется побитовая разница между величинами CSTC для соответствующих пикселей левого и правого изображений. Расстояние Хэмминга показывает количество различающихся битов для двух 31-битных чисел.
Для расчета оценки совпадения вычисляются расстояния Хэмминга между пикселями левого изображения и идущими подряд от текущего пикселя вправо несколькими пикселями правого изображения в соответствии с заданным параметром дистанции D. Оценка совпадения состоит из всех рассчитанных значений расстояния Хэмминга. При необходимости перечень значений для оценки совпадения может быть скорректирован для заданного количества уровней глубины.
Стоимость сопоставления не вычисляется для позиций пикселей, соответствующих первым столбцам D левого изображения.
Второй модуль такого алгоритма – оценка направлений. Из-за шумов на исходных изображениях результат оценки совпадения может быть неоднозначен, и некоторые неправильные совпадения могут иметь меньшую стоимость, чем правильные. Поэтому необходимы дополнительные ограничения для повышения гладкости за счет штрафов за изменения соседних отличий. Это ограничение реализуется путем объединения одномерных путей с минимальной стоимостью из нескольких направлений. Она представлена совокупной стоимостью по нескольким направлениям в каждой позиции пикселя.
Модуль постобработки выбирает наиболее вероятные величины для карты глубин, сглаживает выбросы, и обеспечивает выбор для карты глубин величин с минимальными несоответствиями.
Этап обработки изображения с определением сегментов (сегментация фрагментов на изображении).
Сегментация – это выделение на исходном изображении участков, относящихся к одному фрагменту горной породы.
Фрагменты горной породы выделяются на изображениях двух масштабов:
• изображения целиком, приведенные к размеру, кратному 512 точек;
• участки оригинального изображения размером 512 на 512 точек без дополнительного изменения размеров.
Результаты сегментации, получаемые с разных масштабов, объединяются на последующих шагах алгоритма.
Исходное изображение обрабатывается с использованием трех нейросетевых моделей:
· модель для выделения областей с пустотами (участки неба, посторонние объекты);
· модель для выделения областей мелкой фракции;
· модель для выделения фрагментов породы средней и крупной фракций.
Эти модели относятся к стандартным архитектурам CNN (convolutional neural network) для задач сегментации изображений, когда нужно не только определить класс изображения целиком, но и сегментировать его области по классу, т.е. создать маску, которая будет разделять изображение на несколько классов. Архитектура состоит из стягивающего пути для захвата контекста и симметричного расширяющегося пути, который позволяет осуществить точную локализацию. В устройстве эта модель используется для разделения областей с фрагментами горной породы, мелкой/средней/крупной фракций и пустот.
Модель для выделения фрагментов породы представляет собой единую платформу для обучения моделей обнаружения объектов, сегментации экземпляров и классификации изображений. В устройстве эта модель используется для выделения фрагментов породы на изображении.
Также на этапе сегментации происходит классификация сегментов по типам: пустота, мелкая/средняя/крупная фракция, фрагмент породы.
Этап расчета (определения) линейных размеров сегментов.
На основе данных карты глубин, основной модуль для каждого снимка рассчитывает физические размеры каждого пикселя, которые сохраняются в специальной структуре данных, называемой картой размеров пикселей. Параметр «размер пикселя» показывает, сколько миллиметров реального расстояния занимает каждый пиксель на обрабатываемом снимке.
При обработке в модуле МЛ (ML), на изображениях размечаются все сегменты в виде кусков, областей мелочи и областей пустоты, в которых освещенность недостаточна для распознавания или находятся нераспознаваемые инородные объекты.
Так как фрагмент горной породы может быть частично перекрыт другими фрагментами, сегменты формируются на основании только видимой части фрагментов.
Каждый сегмент характеризуется линейным размером в сантиметрах, который принимается равный максимальной длине фрагмента. Линейный размер сегмента вычисляется как расстояние между двумя максимально друг от друга удаленными точками сегмента. При этом учитывается, что фрагмент горной породы является трехмерным объектом и расчет расстояния осуществляется в трехмерном пространстве с учетом информации из карты глубин.
После определения самых удаленных друг от друга точек вокруг сегмента строится ограничивающий прямоугольник, в котором линейный размер фрагмента породы равен длинной стороне прямоугольника (см. Фиг.2).
Если при редактировании были изменены отдельные сегменты, то производится перерасчет линейных размеров сегментов и их объемов.
Этап расчета объемов сегментов в области анализа.
Объем сегмента (фрагмента) вычисляется как объем тела вращения. За ось вращения принимается прямая, проходящая через две наиболее удаленные друг от друга точки границы фрагмента. Изображение фрагмента поворачивается так, чтобы эта ось лежала горизонтально.
Для определения общего объема маломерной фракции сначала необходимо определить на снимке соотношение площади сегментов маломерной фракции к площади сегментов фрагментов породы.
Объем маломерной фракции рассчитывается на основании предположения, что соотношение объемов маломерной фракции и объемов целых фрагментов совпадает с соотношением площадей соответствующих сегментов.
Для подсчета площадей на изображении находится каждый пиксель, который является частью фрагмента или мелочи. Площадь, занимаемая этим пикселем, находится как h * w, где h – высота (расстояние в миллиметрах между пикселями над рассматриваемым и под ним), w – ширина (расстояние в миллиметрах между пикселями слева и справа от рассматриваемого).
Далее вычисляется общая площадь областей мелочи, и общая площадь всех сегментов. Так как расчет площади для каждого пикселя требует большое количество вычислительных ресурсов, расчет выполняется для каждого 10-го пикселя по вертикали и горизонтали. Тесты показали, что при таком подходе значение  изменяется несущественно для конечного результата, а расчет выполняется значительно быстрее.
изменяется несущественно для конечного результата, а расчет выполняется значительно быстрее.
Расчет распределений по фракциям, маломерных, рабочих и негабаритных фракций и среднего куска.
В настройках приложения пользователем задаются:
· Максимальный размер маломерных фракций;
· Минимальный размер негабаритных фрагментов.
В соответствии с заданными параметрами, сегменты разделяются на 3 категории:
· маломерные – фрагменты с линейными размерами меньше установленного для рабочего диапазона;
· фрагменты рабочего диапазона;
· негабариты – фрагменты с линейными размерами больше установленного для рабочего диапазона.
Также рассчитывается средний размер куска.
По формуле объёма вращения рассчитываются объёмы всех сегментов в области анализа изображения. Этот объём суммируется и берется за 100%.
От него рассчитывается объемное распределение в процентах по десяти фракциям (с шагом в 10%) фрагментов в зависимости от их максимального линейного размера для каждой фракции.
Также рассчитывается объемное распределение в процентах фракций по 10 бункерам с заданными диапазонами линейных размеров кусков для каждого бункера.
Отображение результатов анализа (на экран, в виде отчета).
Результаты фрагментации гранулометрического анализа могут быть отображены в виде диаграммы или гистограммы.
При отображении результатов гранулометрического анализа в виде диаграммы выводится 2 артефакта:
1) Табличное представление;
2) Графическое отображение.
В табличном представлении (Фиг. 4) отображается 2 столбца:
• P-значение;
• Максимальный размер частиц.
В столбце «P-значение» выводятся обозначения от P-10 до Р-100, обозначающие номер фракции по 10% от общего объема выборки.
В столбце «Максимальный размер частиц» — максимальный линейный размер фрагментов в сантиметрах из того диапазона значений, которые попадают в объём выбранной фракции.
В графическом отображении (Фиг.5) каждая точка графика — отдельная фракция. По оси X отображается максимальный линейный размер кусков в каждой фракции. По оси Y отображается процент от общего объёма для каждой фракции. Отдельно вертикальными линиями отмечены минимальный и максимальный линейный размер для рабочего диапазона.
При отображении результатов анализа в виде гистограммы выводится распределение по бункерам в двух видах (Фиг.6):
• табличное представление;
• гистограмма.
Табличное представление содержит 10 строк для отображения 10 бункеров. Каждому бункеру соответствует диапазон линейных размеров фрагментов, который определяется исходя из задаваемого параметра «шаг бункера» или вручную для каждого бункера. Например, если задан шаг 20 см, то первый бункер (с номером 0) содержит фракцию фрагментов с линейными размерами от 0 до 20 см, следующий - от 20 см до 40 см, и т.д.
Табличное представление состоит из 4 столбцов:
· Номер бункера
· Размер – максимальный линейный размер фрагментов в см для каждого бункера.
· Выход в диапазоне – объемный процент фрагментов, которые попадают в этот бункер.
· Выход более чем – объемный процент фрагментов, попадающих в последующие бункеры.
Общий объём фрагментов принимается равным 100%. Далее для каждого бункера рассчитается процент суммарного объема фрагментов с линейными размерами, соответствующими диапазону соответствующего бункера.
Столбец «Выход более чем» отображает процент фрагментов, относящихся к последующим бункерам.
Пример: Пусть для начального бункера столбец «Выход в диапазоне» принимает значение 66,2% – это процент объема всех фрагментов, которые попали в данный бункер. Тогда столбец «Выход более чем» примет значение 33.8%, так как это процент оставшихся камней, которые будут распределены по остальным бункерам. Для следующего бункера с выходом в диапазоне, равным 10%, значение «Выход более чем» будет равно: 33,8 – 10 = 23,8%.
Дополнительно отображается вспомогательная таблица «Общее распределение» (Фиг.7).
В этой таблице указывается, сколько процентов от общего объёма фрагментов занимают негабаритные фрагменты гранулометрического состава, рабочий диапазон и маломерные фрагменты гранулометрического состава. Также указывается средний размер всех фрагментов, взвешенный от объема.
При отображении гистограммы каждый столбец соответствует отдельному бункеру, высота столбца соответствует значениям столбца «Выход в диапазоне». Линия графика поверх гистограммы строится по значениям столбца «Выход более чем».
Передача результатов гранулометрического анализа в виде отчетов.
Отчеты могут быть сформированы в следующих форматах:
• PDF;
• CSV;
• XLSX.
Передача данных реализуется 2 способами:
· отправка сформированного отчета по электронной почте;
· подключение к ПК кабелем (при этом устройство отображается в системе как флэш-накопитель) и ручной перенос сформированных отчетов средствами операционной системы ПК, а также путем использования переносных устройств хранения информации USB-накопитель (USB-диск).
Архитектура аппаратной части.
На Фиг. 8 представлена блок-схема устройства для определения фрагментации гранулометрического объемного состава фракций горной массы.
Основной модуль включает в себя:
· видеопроцессор 2D-операций – для оптимизации операций с растровыми данными (изображения с камер, карты глубин, размеры, площадь и объем сегментов);
· 3D-ускоритель/блок МЛ – для аппаратного ускорения нейросетевых алгоритмов;
· внутренняя память – энергонезависимая память для хранения снимков вместе с сопутствующей информацией, сформированных отчетов.
Дисплей предназначен для визуального контроля области съемки при выполнении съемки, просмотра и корректировки результатов сегментации, просмотра результатов анализа и сформированных отчетов.
Подсистема питания (батарея, зарядное устройство) обеспечивает снабжение устройства электроэнергией с различными уровнями напряжения (для различных компонентов), энергосбережения, контроля и управления зарядом батареи при зарядке.
Внешнее хранилище данных (SD-карта) предназначено для увеличения объема памяти, доступной для хранения информации, а также для переноса файлов на ПК.
Датчики (GPS, освещенность, компас, гироскоп) представляют устройству необходимую информацию (уровень освещенности, географические координаты, положение устройства в пространстве).
Также могут быть предусмотрены звуковая система и модуль связи (Wi-Fi, LTE- модем).
Архитектура программного обеспечения.
Верхнеуровневая архитектура программного обеспечения (Фиг.9) включает следующие модули:
· калибровка – отвечает за определение фактических параметров камер и стерео-оптических искажений, вносимых различиями в отдельных стереокамерах;
· захват изображений – получение стереоизображений с левой и правой камер;
· корректировка изображений – исправление искажений, возникающих из-за различий фактических параметров камер и их оптических искажений;
· обработка изображений – включает построение карты глубин, сегментацию изображений, расчет размеров и объема фрагментов;
· хранение данных – обеспечивает сохранение снимков, карты глубин, метаданных о сегментах, метаданных о параметрах съемки (освещенность, положение устройства, географические координаты, и т.д.) и отчетов;
· GUI (Graphical User Interface) ̶ взаимодействие с пользователем;
· библиотеки – входящие в состав приложения библиотеки, которые используются различными модулями. Выделено отдельно, так как одна библиотека может использоваться несколькими модулями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения гранулометрического состава развала горной массы | 2023 |
|
RU2807542C1 |
| Способ и система автоматизированного определения характеристик керна | 2024 |
|
RU2823446C1 |
| Способ получения набора объектов трехмерной сцены | 2019 |
|
RU2803287C1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| Способ обработки данных и система технического зрения для роботизированного устройства | 2021 |
|
RU2782662C1 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ОБЪЕКТА | 2004 |
|
RU2370817C2 |
| СПОСОБ ТЕПЛОВИЗИОННОЙ ДИАГНОСТИКИ ГЕОЛОГИЧЕСКОЙ СРЕДЫ (ВАРИАНТЫ) | 2014 |
|
RU2556737C1 |
| ТЕЛЕВИЗИОННЫЙ МНОГОРАКУРСНЫЙ СПОСОБ ПОЛУЧЕНИЯ, ПЕРЕДАЧИ И ПРИЕМА СТЕРЕОИНФОРМАЦИИ О НАБЛЮДАЕМОМ ПРОСТРАНСТВЕ С ЕГО АВТОМАТИЧЕСКИМ ИЗМЕРЕНИЕМ. СИСТЕМА "ТРЕТИЙ ГЛАЗ" | 2013 |
|
RU2543549C2 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ ОБЪЕКТА | 2003 |
|
RU2315357C2 |
| Способ реконструкции 3D модели статичного объекта и устройство для его реализации | 2018 |
|
RU2693327C1 |
Изобретение относится к устройству и способу для определения фрагментации объемного гранулометрического состава фракций поверхности горной массы, образуемой, например, в результате буровзрывных работ в карьерах горнодобывающих предприятий. Устройство для определения фрагментации гранулометрического объемного состава фракций горной массы включает основной модуль, выполненный с возможностью формирования карты глубин изображения посредством трех модулей: оценки совпадения, оценки направлений и постобработки, расчета линейных размеров сегментов с учетом данных карты глубин, расчета объемов сегментов в области анализа и формирования фракционного гранулометрического анализа на основе вычисленных объемов сегментов и их линейных размеров, и содержит видеопроцессор 2D-операций, 3D-ускоритель, внутреннюю память, дисплей, подсистему питания, внешнее хранилище данных, группу датчиков, левую и правую стереокамеры, и выполненное с возможностью использования нейросетевых алгоритмов, при этом оно выполнено переносным и портативным. Техническим результатом является обеспечение безопасного, быстрого, точного, надежного переносного портативного устройства с автономным электропитанием для определения фрагментации гранулометрического объемного состава фракций горной массы и способа на его основе, способного работать высокоэффективно в режиме «офлайн». 2 н. и 6 з.п. ф-лы, 9 ил. 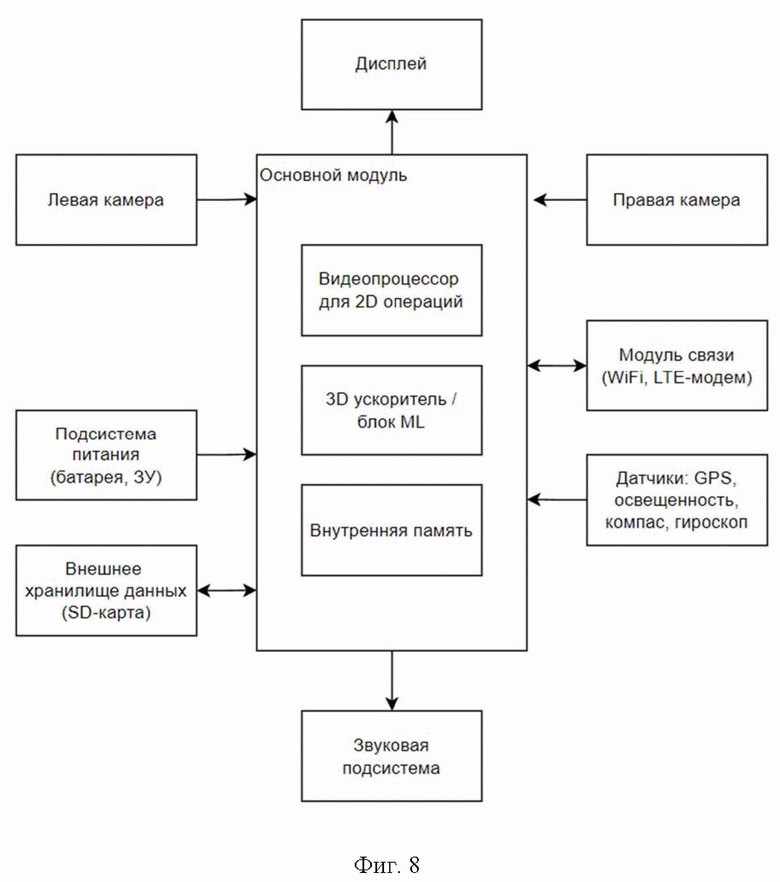
1. Способ определения фрагментации гранулометрического объемного состава фракций горной массы, включающий следующие этапы:
- осуществление съемки и формирование стереоизображения;
- обработка изображения с определением сегментов;
- формирование карты глубин изображения посредством трех модулей: оценки совпадения, оценки направлений и постобработки;
- расчет линейных размеров сегментов с учетом данных карты глубин;
- расчет объемов сегментов в области анализа;
- формирование фракционного гранулометрического анализа на основе вычисленных объемов сегментов и их линейных размеров; и
- вывод фракционного гранулометрического анализа на экран переносного портативного устройства.
2. Способ по п. 1, в котором на этапе осуществления съемки и формирования стереоизображения используют две стереокамеры, левую и правую, кадры с левой и правой стереокамер захватываются синхронно в момент съемки, для обоих кадров выполняется коррекция геометрических искажений и коррекция взаимного положения стереокамер.
3. Способ по п. 1, в котором после этапа осуществления съемки и формирования стереоизображения дополнительно выполняют определение и корректировку области анализа.
4. Способ по п. 1, в котором на этапе обработки изображения с определением сегментов осуществляют обработку исходного изображения с использованием трех нейросетевых моделей: модели для выделения областей с пустотами, модели для выделения областей мелкой фракции и модели для выделения фрагментов средней и крупной пород, а также выполняют классификацию сегментов по типам: пустота, мелкая/средняя/крупная фракция, фрагмент породы.
5. Способ по п. 1, в котором дополнительно выполняют ручную корректировку сегментов.
6. Способ по п. 1, в котором на этапе расчета линейных размеров сегмента линейный размер сегмента вычисляется как расстояние между двумя максимально друг от друга удаленными точками сегмента, при этом расчет расстояния осуществляется в трехмерном пространстве с учетом информации из карты глубины.
7. Устройство для определения фрагментации гранулометрического объемного состава фракций горной массы для осуществления способа по любому из пп. 1-6, включающее основной модуль, выполненный с возможностью формирования карты глубин изображения посредством трех модулей: оценки совпадения, оценки направлений и постобработки, расчета линейных размеров сегментов с учетом данных карты глубин, расчета объемов сегментов в области анализа и формирования фракционного гранулометрического анализа на основе вычисленных объемов сегментов и их линейных размеров, и содержащий видеопроцессор 2D-операций, 3D-ускоритель, внутреннюю память, дисплей, подсистему питания, внешнее хранилище данных, группу датчиков, левую и правую стереокамеры, и выполненное с возможностью использования нейросетевых алгоритмов, при этом оно выполнено переносным и портативным.
8. Устройство по п. 7, дополнительно содержащее звуковую систему и модуль связи.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНСОСТАВА РАЗДРОБЛЕННОЙ ПОРОДЫ В КАРЬЕРАХ | 2008 |
|
RU2388998C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЛИЯНИЯ ГРАНУЛОМЕТРИЧЕСКОГО СОСТАВА ПОРОДЫ НА ПАРАМЕТРЫ ЭКСКАВАЦИИ | 2014 |
|
RU2570797C1 |
| EP 1906168 A2, 02.04.2008 | |||
| JP 2021008754 A, 28.01.2021 | |||
| JP 2009235781 A, 15.10.2009. | |||

