Область техники, к которой относится изобретение
Изобретение относится к медицине, а именно к хирургической стоматологии и может использоваться для анализа прецизионности планирования и проведения дентальной имплантации.
Уровень техники
Использование хирургических навигационных шаблонов давно доказало свою эффективность в реабилитации пациентов с полной и частичной адентией. Цифровое планирование операции позволяет снизит риски ятрогении, уменьшить время операции, а также заранее смоделировать ортопедическую конструкцию.
У каждой фирмы производителя имеются свои навигационные протоколы и хирургические наборы фрез. Так же изготовление шаблона состоит из большого количества технических этапов, начиная от получения оптических слепков и заканчивая постобработкой, каждый из которых может повлиять на его качество. Оба этих фактора напрямую влияют на точность позиционирования имплантата в кости, поэтому необходимо сравнение цифрового планирования с результатами проведенной операции для выявления ошибок и повышения качества лечения.
Из уровня техники известен способ, по которому в дооперационном периоде проводят планирование дентальной имплантации на основании данных компьютерной томографии и оптических моделей челюстей пациента. В соответствии с планированием, методом объемной печати, изготавливается навигационный шаблон, по которому проводят операцию. В после операционном периоде, проводят контрольную компьютерную томографию. Далее в программе для планирования стоматологического лечения, проводят сопоставление изображений, полученных методом компьютерной томографии, фактически установленного дентального имплантата и его виртуальной модели, полученной в дооперационном периоде. После совмещения измеряют осевое отклонение имплантата, отклонение в области шейки и верхушки имплантата (Дробышев, А. Ю. Оценка точности позиционирования дентальных имплантатов с использованием стереолитографических хирургических шаблонов, изготовленных по различным оптическим моделям / А. Ю. Дробышев, Д. С. Ваулина, Н. А. Редько // Актуальные вопросы стоматологии: сборник трудов всероссийской V научно-практической конференции с международным участием, Киров, 13-14 мая 2021 года. - Киров: Федеральное государственное бюджетное образовательное учреждение высшего образования "Кировский государственный медицинский университет" Министерства здравоохранения Российской Федерации, 2021. - С. 48-50. - EDN REZAUW).
Недостатком данного метода являются визуальные шумы, создаваемые металлическим имплантатом, не позволяющие воспроизвести реальные размеры имплантата в виде 3Д-объекта.
Известна методика оценки точности установки зубных имплантатов с применением цифровых технологий, с помощью компьютерной программы (свидетельство о государственной регистрации программы для ЭВМ № 2021665044, 17.09.2021), в которой совмещают изображения запланированного положения имплантатов с установленными в полости рта и измеряют степень линейных отклонений в области апикальной и корональной частей имплантатов и углов наклона между длинными осями имплантатов (https://cyberleninka.ru/article/n/metodika-otsenki-tochnosti-ustanovki-zubnyh-implantatov-s-primeneniem-tsifrovyh-tehnologiy).
Также, как и в предыдущем известном способе, визуальные рентгенологические шумы размывают рельеф поверхности установленного имплантата, что не позволяет провести точные измерения его позиционирования.
Решаемой в предлагаемом изобретении технической проблемой являлась разработка метода объективной оценки точности установки дентального имплантата непосредственно после имплантации.
Раскрытие сущности изобретения
Техническим результатом изобретения является объективизация оценки отклонения, фактически установленного имплантата от его виртуальной модели, полученной при планировании операции непосредственно в процессе операции без проведения рентгенологического исследования.
Технический результат достигается за счёт следующей последовательности совокупности существенных признаков:
включающий определение отклонений частей имплантата на его виртуальных моделях, полученных, соответственно, на этапе планирования в дооперационном периоде и во время операции после установки имплантата,
для чего последовательно осуществляют:
на этапе планирования в дооперационном периоде в компьютерной программе позиционируют в место отсутствующего зуба виртуальную модель дентального имплантата, соединенную с виртуальной моделью скан-маркера той же имплантационной системы, что и дентальный имплантат,
виртуально моделируют навигационный шаблон устанавливаемого дентального имплантата, который затем изготавливают методом объемной печати,
по изготовленному методом объемной печати шаблону проводят установку дентального имплантата, при этом достигают жесткости закрепления имплантата в кости от 40 до 45 Н/см, затем в дентальный имплантат фиксируют скан-маркер с усилием 25 Н/см, контролируемым динамометрическим ключом;
после установки дентального имплантата во время операции в процессе компьютерной томографии снова проводят внутриротовое сканирование зубных рядов с установленным скан-маркером, получая виртуальную модель установленного дентального имплантата со скан-маркером,
проводят сопоставление виртуальной модели дентального имплантата со скан-маркером, полученной на этапе планирования в дооперационном периоде, с виртуальной моделью установленного дентального имплантата со скан-маркером, полученной во время операции после установки дентального имплантата,
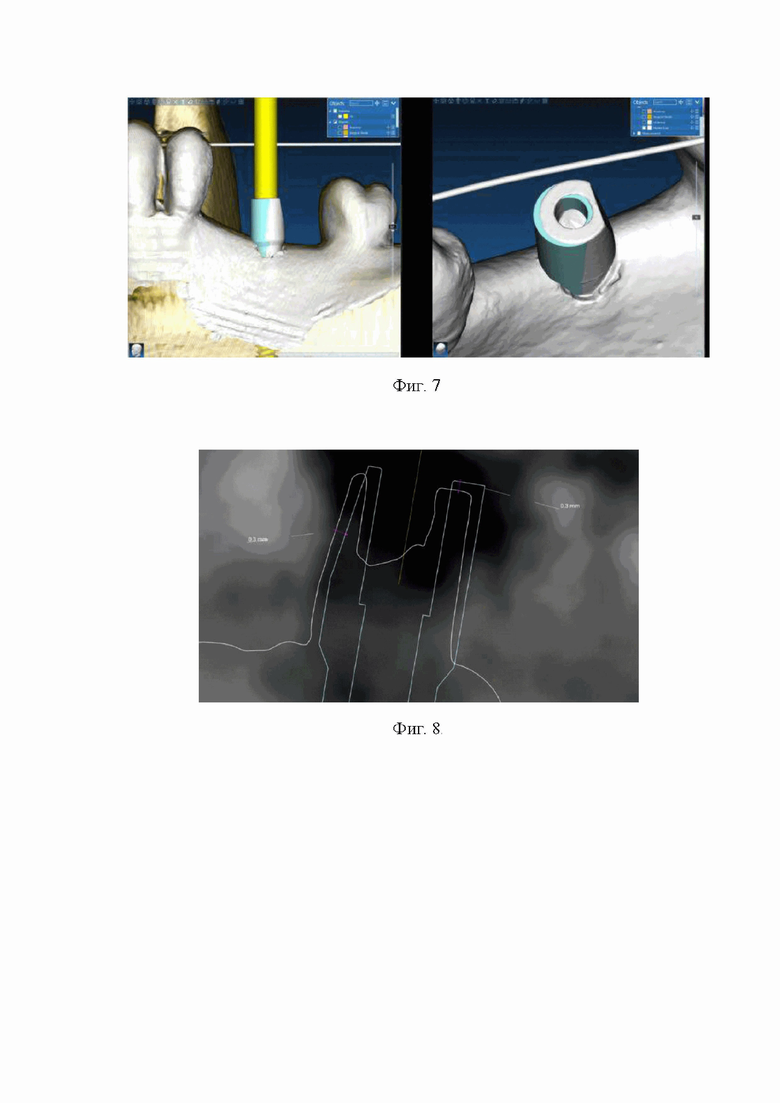
виртуально проводят измерения по разметкам, показанным на фиг. 4:
проводят продольные оси В1-Г1 и В2-Г2, соответственно, виртуальных моделей дентального имплантата и скан-маркера, полученных на этапе планирования в дооперационном периоде и после установки дентального имплантата во время операции, замеряют расстояние В1-М от апикальной точки В1 виртуальной модели имплантата, полученной на этапе планирования в дооперационном периоде, до точки пересечения продольных осей М, и расстояние В2-М от апикальной точки В2 виртуальной модели имплантата, полученной после установки дентального имплантата во время операции, до точки пересечения продольных осей М, откладывают эти расстояния на продолжении каждой из продольных осей в сторону соответствующего скан-маркера как М-Г1 и М-Г2,
проводят прямую В1-В2 и параллельную ей прямую Г1-Г2,
длину отрезка Г1-Г2 принимают за отклонение апикальной точки установленного дентального имплантата от ее дооперационно планируемого положения,
соединяют между собой отрезком точки изображения середин оснований каждого из скан-маркеров Д1 и Д2, соответственно, на виртуальных моделях дентального имплантата, полученных на этапе планирования в дооперационном периоде и после установления дентального имплантата во время операции, измеряют длину отрезка Д1-Д2, которую принимают за отклонение установленного дентального имплантата в пришеечной части,
угол Ж, образуемый пересечением двух продольных осей виртуальных моделей дентального имплантата со скан-маркерами, принимают за угол отклонения оси установленного дентального имплантата относительно его дооперационно планируемого положения,
проводят прямую Е1, по краю изображения виртуальной модели скан-маркера, полученной на этапе планирования в дооперационном периоде, - в плоскости верхней части данного изображения, и параллельную ей прямую Е2, проведенную через верхнюю точку изображения виртуальной модели скан-маркера, полученной после установки дентального имплантата во время операции; при этом длину перпендикуляра между этими параллельными прямыми принимают за отклонение по глубине фактически установленного дентального имплантата от планируемого.
Способ определения отклонений установленного дентального имплантата осуществляется следующим образом:
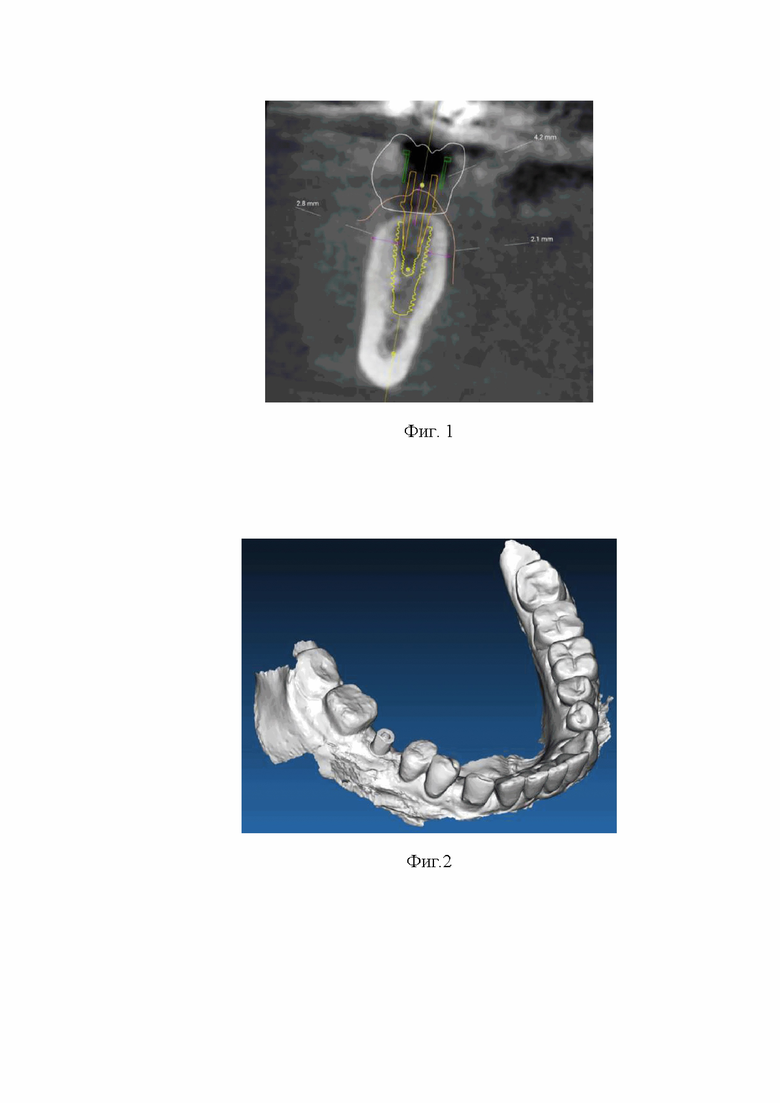
1. на этапе планирования в дооперационном периоде в компьютерной программе позиционируют в место отсутствующего зуба виртуальную модель дентального имплантата, соединенную с виртуальной моделью скан-маркера той же имплантационной системы, что и дентальный имплантат (фиг. 1);
2. виртуально моделируют навигационный шаблон устанавливаемого дентального имплантата, который затем изготавливают методом объемной печати, по изготовленному методом объемной печати шаблону проводят установку дентального имплантата, при этом достигают жесткости закрепления имплантата в кости от 40 до 45 Н/см, затем в дентальный имплантат фиксируют скан-маркер с усилием 25 Н/см, контролируемым динамометрическим ключом;
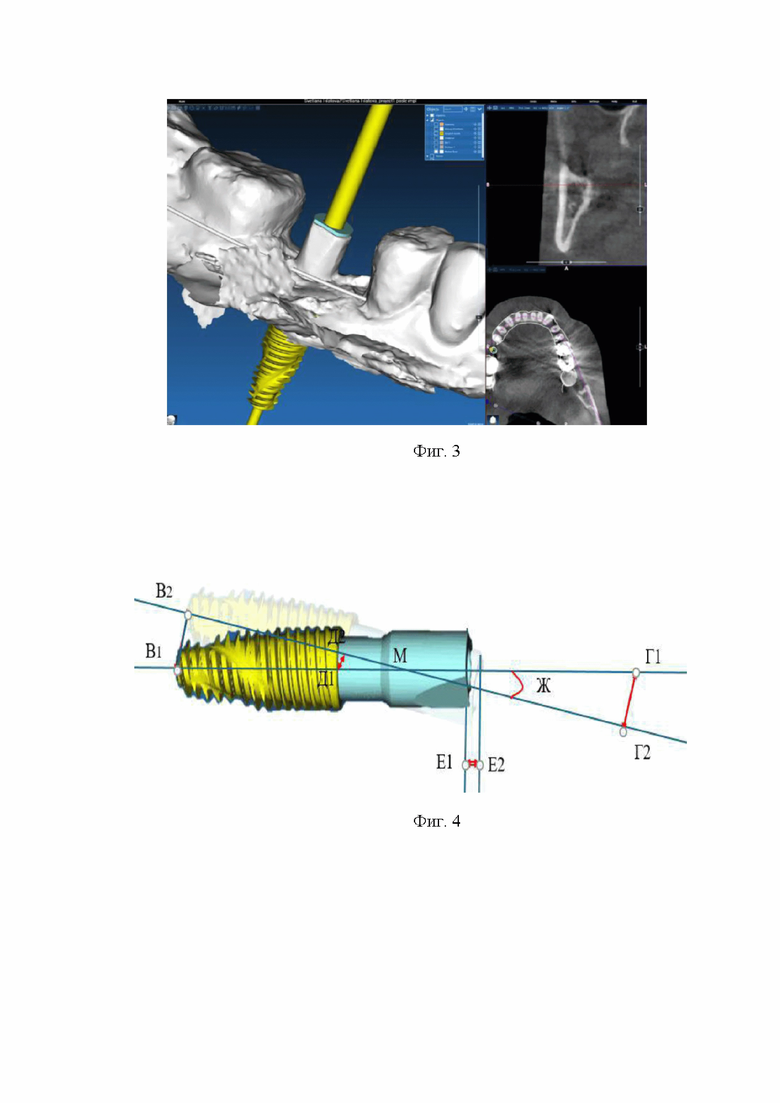
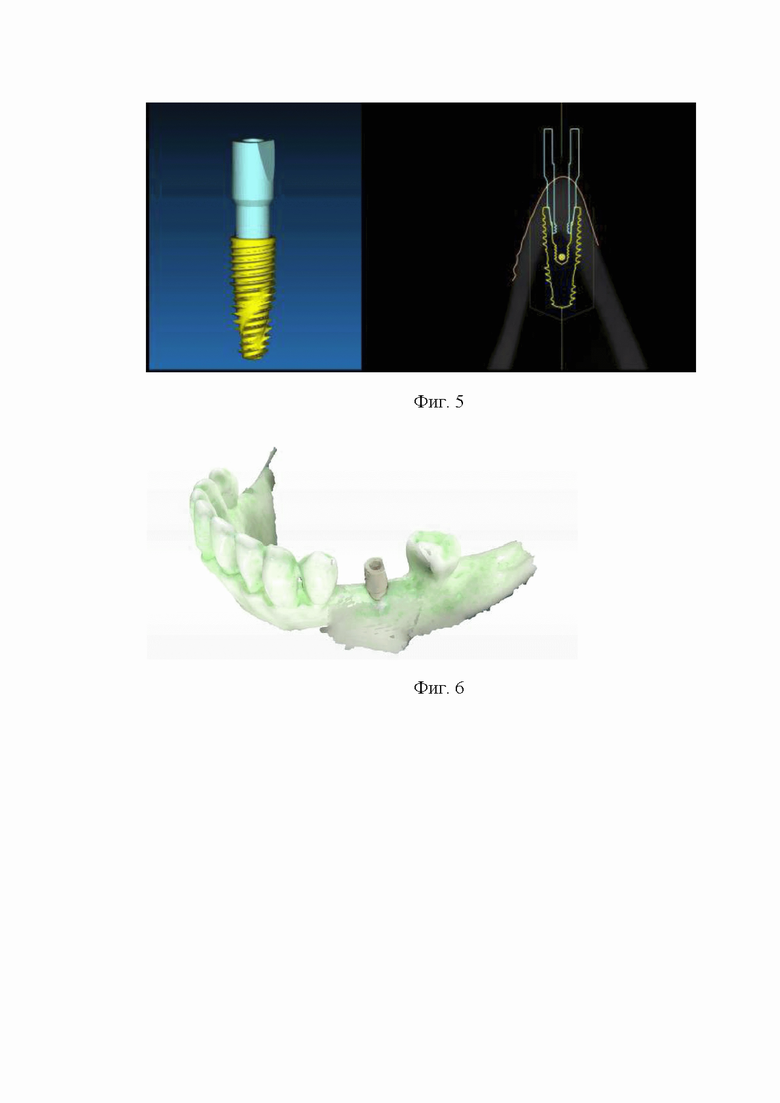
3. после установки дентального имплантата во время операции в процессе компьютерной томографии снова проводят внутриротовое сканирование зубных рядов с установленным скан-маркером, получая виртуальную модель установленного дентального имплантата со скан-маркером (фиг. 2), проводят сопоставление виртуальной модели дентального имплантата со скан-маркером, полученной на этапе планирования в дооперационном периоде, с виртуальной моделью установленного дентального имплантата со скан-маркером, полученной во время операции после установки дентального имплантата (фиг. 3);
4. С помощью виртуальной линейки и транспортира, виртуально проводят измерения по разметкам, показанным на фиг. 4:
проводят продольные оси В1-Г1 и В2-Г2, соответственно, виртуальных моделей дентального имплантата и скан-маркера, полученных на этапе планирования в дооперационном периоде и после установки дентального имплантата во время операции, замеряют расстояние В1-М от апикальной точки В1 виртуальной модели имплантата, полученной на этапе планирования в дооперационном периоде, до точки пересечения продольных осей М, и расстояние В2-М от апикальной точки В2 виртуальной модели имплантата, полученной после установки дентального имплантата во время операции, до точки пересечения продольных осей М, откладывают эти расстояния на продолжении каждой из продольных осей в сторону соответствующего скан-маркера как М-Г1 и М-Г2,
проводят прямую В1-В2 и параллельную ей прямую Г1-Г2,
длину отрезка Г1-Г2 принимают за отклонение апикальной точки установленного дентального имплантата от ее дооперационно планируемого положения,
соединяют между собой отрезком точки изображения середин оснований каждого из скан-маркеров Д1 и Д2, соответственно, на виртуальных моделях дентального имплантата, полученных на этапе планирования в дооперационном периоде и после установления дентального имплантата во время операции, измеряют длину отрезка Д1-Д2, которую принимают за отклонение установленного дентального имплантата в пришеечной части,
угол Ж, образуемый пересечением двух продольных осей виртуальных моделей дентального имплантата со скан-маркерами, принимают за угол отклонения оси установленного дентального имплантата относительно его дооперационно планируемого положения,
проводят прямую Е1, по краю изображения виртуальной модели скан-маркера, полученной на этапе планирования в дооперационном периоде, - в плоскости верхней части данного изображения, и параллельную ей прямую Е2, проведенную через верхнюю точку изображения виртуальной модели скан-маркера, полученной после установки дентального имплантата во время операции; при этом длину перпендикуляра между этими параллельными прямыми принимают за отклонение по глубине фактически установленного дентального имплантата от планируемого.
Для подтверждения эффективности предложенного способа был проведен ряд экспериментов in vitro.
Пример.
С фантомной модели нижней челюсти с дефектом зубного ряда в боковом отделе был получен оптический слепок и проведена её компьютерная томография. В программе для планирования дентальной имплантации RealGuide, было проведено сопоставление объемных изображений оптических слепков и компьютерной томографии с последующей расстановкой виртуальной модели имплантата с фиксированным скан-маркером (фиг. 5).
После чего, в соответствии с планированием был изготовлен навигационный шаблон методом объемной печати и проведена установка дентального имплантата в фантомную модель по полному цифровому протоколу, с жесткостью его закрепления в 40 Н/см. В имплантат фиксировали скан-маркер с усилием контролируемым динамометрическим ключом в 25 Н/см, и проводили внутриротовое сканирование (фиг. 6).
В программе для планирования дентальной имплантации RealGuide по общим статическим меткам, роль которых исполняли зубы, сопоставляли виртуальные модели имплантата с фиксированным скан-маркером полученные на этапе планирования, и оптические слепки системы - имплантат-скан-маркер, полученными после установки имплантата в фантомную модель (фиг. 7).
Измерения отклонения проводили по разработанному нами методу.
По продольной оси виртуальных моделей скан-маркеров, полученных при планировании имплантации и после её проведения проводили вертикальные линии. Замеряли расстояние от апикальной точки виртуальной модели имплантата до пересечения продольных линий, полученное расстояние откладывали по вертикальным линиям от места пересечения к периферии и обозначали точками, при измерении, расстояние между указанными точками составило 0,4 мм - что соответствовало отклонению апикальной части виртуальной модели планируемого имплантата от апикальной части фактически установленного имплантата в фантомную модель.
Измеренное расстояние от середины основания виртуальных моделей скан-маркеров составило 0,3 мм, что соответствовало отклонению имплантата в пришеечной области.
Угол, образуемый линиями, проведенными вдоль оси виртуальных моделей двух скан-маркеров, соответствовал углу оси отклонения физического имплантата и был равен 6 градусам.
Расстояние между параллельными прямыми проведенными по касательной верхней части виртуальных моделей двух скан-маркеров соответствующий отклонению по глубине фактически установленного имплантата от планируемого, составил 0,3 мм (фиг. 8).
Для подтверждения точности проведенных измерений, виртуальная модель нижней челюсти с виртуальной моделью планируемого имплантата были преобразованы в физическую по средствам 3D-печати. На стоматологическом триммере напечатанная модель и физическая модель с установленным имплантатом были распилены вдоль по середине установленных имплантатов. На моделях, по внутренним границам зубов ограничивающих дефект зубного ряда химическим карандашом были прочерчены параллельные вертикальные линии. Далее проводились перпендикулярные линии от вертикальных до апикальной точки имплантатов и середины пришеечной области, полученные значения фиксировались в протоколе исследования. Также проводился замер от нижнего края челюсти до апекса, для получения значений погрешности по глубине погружения имплантата. Для получения значений отклонения имплантата в вестибуло-оральном направлении, проводили еще один поперечный разрез моделей, также по середине имплантата и проводили аналогичные замеры от различных участков имплантата до конечных идентичных на двух моделях точках наружной и внутренней части челюсти.
После проведения расчётов были получены данные о погрешности установки дентального имплантата: апикальной части на 0,4 мм; по глубине погружения и смещения в пришеечной области на 0,3 мм; угол отклонения оси имплантата составил 6 градусов - что полностью соответствовало данным, полученным при реализации предлагаемого способа.
Краткое описание иллюстраций:
Фиг. 1. В дооперационном периоде производится виртуальное сопоставление данных компьютерной томографии и объемных изображений челюстей, полученных методом внутриротового сканирования.
Фиг. 2. Внутриротовое сканирование зубных рядов со скан-маркером.
Фиг. 3. Сопоставление виртуальных моделей имплантата с фиксированным скан-маркером полученных на этапе планирования, с оптическими слепками системы - имплантат-скан-маркер, полученными во время операции.
Фиг. 4. Измерение отклонения апикальной и пришеечной части имплантата по оси и уровню заглубления.
Фиг. 5. Виртуальная модель дентального имплантата с фиксированным скан-маркером позиционированная в фантомной модели для проведения операции.
Фиг. 6. Оптический слепок фантомной модели с усыновлённым дентальным имплантатом и фиксированном в нем скан-маркером.
Фиг. 7. Сопоставления виртуальных моделей скан-маркеров, полученных при планировании планирования имплантации и после её проведения.
Фиг. 8. Измерения погрешности установки дентального имплантата по вертикали и горизонтали в пришеечной его части.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проведения операции синус-лифтинга с одномоментным удалением ретенционной кисты верхнечелюстного синуса | 2023 |
|
RU2790553C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ 3D-ХИРУРГИЧЕСКОГО ШАБЛОНА ПРИ ПЛАНИРОВАНИИ ТРАНСГИНГИВАЛЬНОЙ ДЕНТАЛЬНОЙ ИМПЛАНТАЦИИ | 2012 |
|
RU2522379C2 |
| Способ компьютерного моделирования восстановления биомеханических показателей зуба для равномерного распределения жевательной нагрузки на опорные ткани зуба и костную ткань | 2019 |
|
RU2693993C1 |
| СПОСОБ ПЛАНИРОВАНИЯ ОПЕРАЦИИ СИНУС-ЛИФТИНГ | 2018 |
|
RU2688699C1 |
| Способ одномоментного изготовления направляющего хирургического шаблона для установки дентальных имплантатов и индивидуальных постоянных абатментов | 2018 |
|
RU2674919C1 |
| Способ замещения костных дефектов челюстей с возможностью временного зубного протезирования на период интеграции дентальных имплантатов | 2023 |
|
RU2793523C1 |
| Направляющий шаблон для мягкотканной трансплантации | 2021 |
|
RU2760296C1 |
| Способ оценки костной ткани альвеолярного гребня нижней челюсти в процессе подготовки к дентальной имплантации | 2022 |
|
RU2790778C1 |
| Способ расчета объема костнозамещающего материала при планировании операции направленной регенерации костной ткани | 2018 |
|
RU2683852C1 |
| СПОСОБ НАВИГАЦИОННОЙ ТРЕПАН-БИОПСИИ ЧЕЛЮСТНЫХ КОСТЕЙ | 2021 |
|
RU2784593C2 |
Изобретение относится к медицине, а именно к хирургической стоматологии и может использоваться для анализа прецизионности планирования и проведения дентальной имплантации. На этапе планирования в компьютерной программе позиционируют на место отсутствующего зуба виртуальную модель дентального имплантата, соединенную с виртуальной моделью скан-маркера той же имплантационной системы, что и дентальный имплантат. Виртуально моделируют навигационный шаблон устанавливаемого дентального имплантата, который затем изготавливают методом объемной печати. По изготовленному методом объемной печати шаблону проводят установку дентального имплантата, затем в дентальный имплантат фиксируют скан-маркер. После установки дентального имплантата во время операции в процессе компьютерной томографии проводят внутриротовое сканирование зубных рядов с установленным скан-маркером, получая виртуальную модель установленного дентального имплантата со скан-маркером. Проводят сопоставление виртуальной модели дентального имплантата со скан-маркером, полученной на этапе планирования в дооперационном периоде, с виртуальной моделью установленного дентального имплантата со скан-маркером, полученной во время операции после установки дентального имплантата. Виртуально проводят измерения по разметкам. На основании полученных данных определяют отклонения частей имплантата на его виртуальных моделях, полученных, соответственно, на этапе планирования в дооперационном периоде и во время операции после установки имплантата. Достигается возможность оценки отклонения положения фактически установленного имплантата от положения его виртуальной модели, полученного при планировании операции, непосредственно в процессе операции. 8 ил., 1 пр.
Способ определения отклонений установленного дентального имплантата от планируемого положения, включающий определение отклонений положения частей имплантата на его виртуальных моделях, полученных, соответственно, на этапе планирования в дооперационном периоде и во время операции после установки имплантата, при этом: на этапе планирования в дооперационном периоде в компьютерной программе позиционируют на место отсутствующего зуба виртуальную модель дентального имплантата, соединенную с виртуальной моделью скан-маркера той же имплантационной системы, что и дентальный имплантат, виртуально моделируют навигационный шаблон дентального имплантата и изготавливают его методом объемной печати, по изготовленному методом объемной печати шаблону проводят установку дентального имплантата, при этом достигают жесткости закрепления имплантата в кости от 40 до 45 Н/см, затем в дентальный имплантат фиксируют скан-маркер с усилием 25 Н⋅см, контролируемым динамометрическим ключом; после установки дентального имплантата во время операции в процессе компьютерной томографии проводят внутриротовое сканирование зубных рядов с установленным скан-маркером, получая виртуальную модель установленного дентального имплантата со скан-маркером, проводят сопоставление виртуальной модели дентального имплантата со скан-маркером, полученной на этапе планирования в дооперационном периоде, с виртуальной моделью установленного дентального имплантата со скан-маркером, полученной во время операции после установки дентального имплантата, виртуально проводят измерения по разметкам: проводят продольные оси В1-Г1 и В2-Г2, соответственно, виртуальных моделей дентального имплантата и скан-маркера, полученных на этапе планирования в дооперационном периоде и после установки дентального имплантата во время операции замеряют расстояние В1-М от апикальной точки В1 виртуальной модели имплантата, полученной на этапе планирования в дооперационном периоде, до точки пересечения продольных осей М, и расстояние В2-М от апикальной точки В2 виртуальной модели имплантата, полученной после установки дентального имплантата во время операции, до точки пересечения продольных осей М, откладывают эти расстояния на продолжении каждой из продольных осей в сторону соответствующего скан-маркера как М-Г1 и М-Г2, проводят прямую В1-В2 и параллельную ей прямую Г1-Г2, длину отрезка Г1-Г2 принимают за отклонение апикальной точки установленного дентального имплантата от ее планируемого положения, соединяют между собой отрезком точки изображения середин оснований каждого из скан-маркеров Д1 и Д2, соответственно, на виртуальных моделях дентального имплантата, полученных на этапе планирования в дооперационном периоде и после установления дентального имплантата во время операции, измеряют длину отрезка Д1-Д2, которую принимают за отклонение положения установленного дентального имплантата в пришеечной части, угол Ж, образуемый пересечением двух продольных осей виртуальных моделей дентального имплантата со скан-маркерами, принимают за угол отклонения оси установленного дентального имплантата относительно его планируемого положения, проводят прямую Е1 в плоскости верхней части изображения виртуальной модели скан-маркера, полученной на этапе планирования в дооперационном периоде, и параллельную ей прямую Е2 через верхнюю точку изображения виртуальной модели скан-маркера, полученной после установки дентального имплантата во время операции; при этом длину перпендикуляра между этими параллельными прямыми принимают за отклонение по глубине фактически установленного дентального имплантата от планируемой.
| RU 2176488 C1, 10.12.2001 | |||
| СПОСОБ ВОССТАНОВЛЕНИЯ ЗУБОАЛЬВЕОЛЯРНОГО КОМПЛЕКСА С НЕМЕДЛЕННОЙ ДЕНТАЛЬНОЙ ИМПЛАНТАЦИЕЙ С ИСПОЛЬЗОВАНИЕМ НАВИГАЦИОННОГО ХИРУРГИЧЕСКОГО ШАБЛОНА И МАТЕРИАЛА ЛИТАР | 2021 |
|
RU2770199C1 |
| НАПРАВЛЯЮЩИЙ ШАБЛОН ДЛЯ ХИРУРГИЧЕСКОЙ СТОМАТОЛОГИИ | 2020 |
|
RU2769621C2 |
| WO 2009105508 A2, 27.08.2009 | |||
| CN 110314004 B, 07.04.2020 | |||
| ДРОБЫШЕВ А.Ю | |||
| и др | |||
| Оценка прецизионности позиционирования дентальных имплантатов после применения хирургических шаблонов у пациентов с частичным отсутствием зубов // Медицинский альманах | |||
| Электромагнитный прерыватель | 1924 |
|
SU2023A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

