Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах интервального регулирования движения поездов, на перегонах с централизованным размещением аппаратуры.
Известно устройство передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки, содержащее управляющий блок сигналов взаимодействия компонентов системы интервального регулирования, один вход/выход которого подключен через один CAN-интерфейс к входу/выходу автоматизированного рабочего места дежурного по станции, а другой вход/выход подключен через другой CAN-интерфейс к одному входу/выходу приемопередатчика сигналов КРЛ и АЛС, другой вход/выход которого соединен с рельсовой линией, блок логической реконфигурации рельсовых цепей, вход/выход которого соединен через другой CAN-интерфейс с другим входом/выходом управляющего блока сигналов взаимодействия компонентов системы интервального регулирования (RU 2417913, B61L 23/16, 10.05.2011).
Недостатком известного устройства является большой расход сигнального кабеля и большие потери электроэнергии при передаче сигналов по кабелю из центра к удаленным рельсовым цепям в середине перегонов между станциями. Это приводит к удорожанию строительства и эксплуатации устройства, а также ограничивает область его применения максимальными перегонами между станциями длиной до 20 км.
В качестве прототипа принято устройство передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки, содержащее первый CAN-интерфейс связи, к которому подключены управляющий блок сигналов взаимодействия системы интервального регулирования и компьютер автоматизированного рабочего места дежурного по станции, второй CAN-интерфейс связи, к которому подключены блок логической реконфигурации рельсовых цепей и приемопередатчик сигналов КРЛ и АЛС, соединенный посредством сигнального кабеля с рельсовой цепью, рельсовые цепи на перегоне между станциями разделены на группы рельсовых цепей, каждая из которых соединена с соответствующим приемопередатчиком сигналов КРЛ и АЛС, размещенным с соответствующим блоком логической реконфигурации рельсовых цепей в отдельном шкафу напольной аппаратуры, снабженном блоком силового электропитания, подключенным к двухпроводной линии продольного энергоснабжения, при этом в каждом отдельном шкафу напольной аппаратуры ко второму CAN-интерфейсу связи, к которому подключены блок логической реконфигурации рельсовых цепей и приемопередатчик сигналов КРЛ и АЛС, дополнительно подключен первый двунаправленный оптоэлектрический преобразователь интерфейсов связи, соединенный через первый элемент оптического сопряжения с магистральной оптоволоконной линией цифровой связи, проложенной вдоль железнодорожного пути, а на станции размещения компьютера автоматизированного рабочего места дежурного по станции к первому CAN-интерфейсу связи подключен второй двунаправленный оптоэлектрический преобразователь интерфейсов связи, который через второй элемент оптического сопряжения соединен с магистральной оптоволоконной линией цифровой связи (RU 2754375, B61L 23/16, 01.09.2021).
Известное устройство не обладает необходимым уровнем отказоустойчивости. Это связано с тем, что при повреждении оптоволоконной линии теряется значительная часть функций системы по эффективному регулированию движения поездов.
Технический результат изобретения заключается в повышении отказоустойчивости устройства.
Технический результат достигается тем, что в устройстве передачи управляющих команд в рельсовые цепи централизованной системы автоблокировки, содержащем первый CAN-интерфейс связи, к которому подключены управляющий блок сигналов взаимодействия системы интервального регулирования и компьютер автоматизированного рабочего места дежурного по станции, второй CAN-интерфейс связи, к которому подключены блок логической реконфигурации рельсовых цепей и приемопередатчик сигналов КРЛ и АЛС, соединенный посредством сигнального кабеля с рельсовой цепью, рельсовые цепи на перегоне между станциями разделены на группы рельсовых цепей, каждая из которых соединена с соответствующим приемопередатчиком сигналов КРЛ и АЛС, размещенным с соответствующим блоком логической реконфигурации рельсовых цепей в отдельном шкафу напольной аппаратуры, снабженном блоком силового электропитания, подключенным к двухпроводной линии продольного энергоснабжения, при этом в каждом отдельном шкафу напольной аппаратуры ко второму CAN-интерфейсу связи, к которому подключены блок логической реконфигурации рельсовых цепей и приемопередатчик сигналов КРЛ и АЛС, дополнительно подключен первый двунаправленный оптоэлектрический преобразователь интерфейсов связи, соединенный через первый элемент оптического сопряжения с магистральной оптоволоконной линией цифровой связи, проложенной вдоль железнодорожного пути, а на станции размещения компьютера автоматизированного рабочего места дежурного по станции к первому CAN-интерфейсу связи подключен второй двунаправленный оптоэлектрический преобразователь интерфейсов связи, который через второй элемент оптического сопряжения соединен с магистральной оптоволоконной линией цифровой связи, согласно изобретению в каждом отдельном шкафу напольной аппаратуры установлены и подключены ко второму CAN-интерфейсу связи блок цифровых камер видеонаблюдения и блок радиоприемопередатчиков частотных диапазонов радиоволн УКВ и LTE, которые объединены в локальную сеть радиосвязи с аналогичным блоком радиоприемопередатчиков, расположенным рядом с компьютером автоматизированного рабочего места дежурного по станции и подключенным к первому CAN-интерфейсу связи, при этом компьютер автоматизированного рабочего места дежурного по станции снабжен программным модулем интеллектуального распознавания последних вагонов поездов по их фотоизображениям, полученным от соответствующих блоков цифровых камер видеонаблюдения в моменты времени прохождения этих вагонов мимо соответствующих шкафов напольной аппаратуры, и программным модулем вычисления координат положения локомотивов этих же поездов в те же самые моменты времени с использованием для этих вычислений измерения временных задержек в распространении радиосигналов от блоков радиоприемопередатчиков частотных диапазонов радиоволн УКВ и LTE к бортовым радиоприемопередатчикам локомотивов.
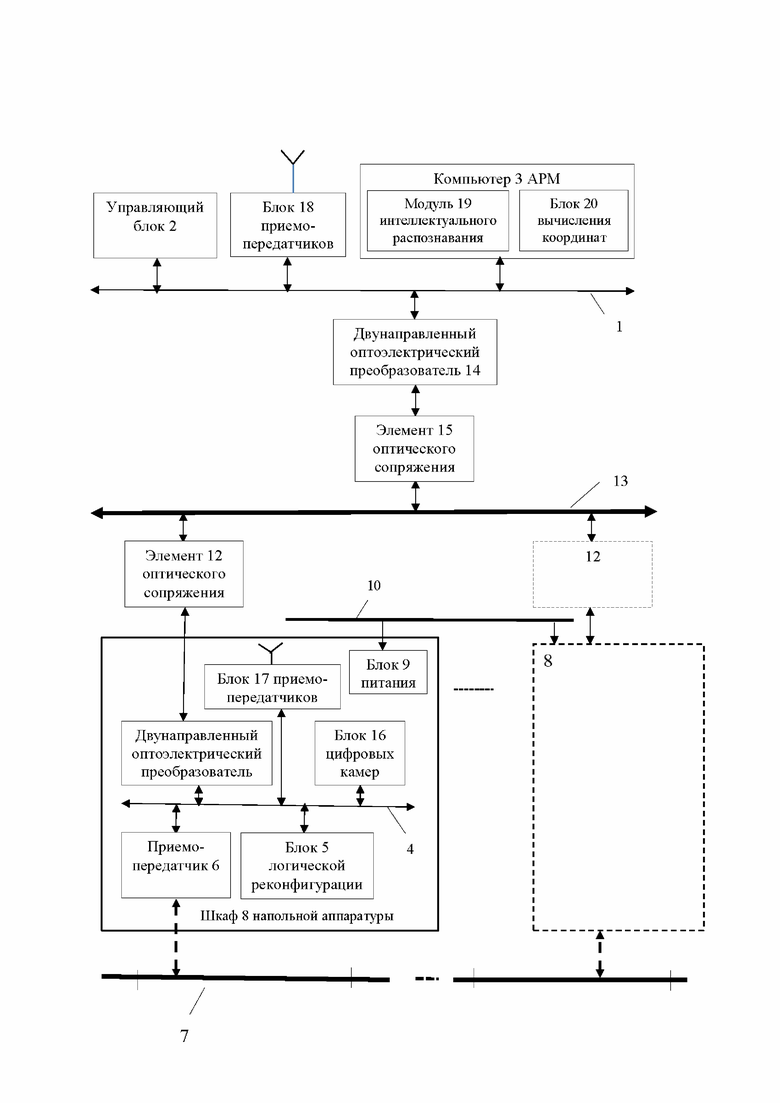
На чертеже представлена функциональная схема устройства передачи управляющих команд в рельсовые цепи централизованной системы автоблокировки.
Устройство передачи управляющих команд в рельсовые цепи централизованной системы автоблокировки содержит первый CAN-интерфейс связи 1, к которому подключены управляющий блок 2 сигналов взаимодействия системы интервального регулирования и компьютер 3 автоматизированного рабочего места дежурного по станции, второй CAN-интерфейс связи 4, к которому подключены блок 5 логической реконфигурации рельсовых цепей и приемопередатчик 6 сигналов КРЛ и АЛС, соединенный посредством сигнального кабеля с рельсовой цепью 7, рельсовые цепи 7 на перегоне между станциями разделены на группы рельсовых цепей, каждая из которых соединена с соответствующим приемопередатчиком 6 сигналов КРЛ и АЛС, размещенным с соответствующим блоком 5 логической реконфигурации рельсовых цепей в отдельном шкафу 8 напольной аппаратуры, снабженном блоком 9 силового электропитания, подключенным к двухпроводной линии 10 продольного энергоснабжения, при этом в каждом отдельном шкафу 8 напольной аппаратуры ко второму CAN-интерфейсу связи 4, к которому подключены блок 5 логической реконфигурации рельсовых цепей и приемопередатчик 6 сигналов КРЛ и АЛС, дополнительно подключен первый двунаправленный оптоэлектрический преобразователь 11 интерфейсов связи, соединенный через первый элемент 12 оптического сопряжения с магистральной оптоволоконной линией 13 цифровой связи, проложенной вдоль железнодорожного пути, а на станции размещения компьютера 3 автоматизированного рабочего места дежурного по станции к первому CAN-интерфейсу связи 1 подключен второй двунаправленный оптоэлектрический преобразователь 14 интерфейсов связи, который через второй элемент 15 оптического сопряжения соединен с магистральной оптоволоконной линией 13 цифровой связи, в каждом отдельном шкафу 8 напольной аппаратуры установлены и подключены ко второму CAN-интерфейсу связи 4 блок 16 цифровых камер видеонаблюдения и блок 17 радиоприемопередатчиков частотных диапазонов радиоволн УКВ и LTE, которые объединены в локальную сеть радиосвязи с аналогичным блоком 18 радиоприемопередатчиков, расположенным рядом с компьютером 3 автоматизированного рабочего места дежурного по станции и подключенным к первому CAN-интерфейсу связи 1, при этом компьютер 3 автоматизированного рабочего места дежурного по станции снабжен программным модулем 19 интеллектуального распознавания последних вагонов поездов по их фотоизображениям, полученным от соответствующих блоков 16 цифровых камер видеонаблюдения в моменты времени прохождения этих вагонов мимо соответствующих шкафов 8 напольной аппаратуры, и программным модулем 20 вычисления координат положения локомотивов этих же поездов в те же самые моменты времени с использованием для этих вычислений измерения временных задержек в распространении радиосигналов от блоков радиоприемопередатчиков частотных диапазонов радиоволн УКВ и LTE к бортовым радиоприемопередатчикам локомотивов (на чертеже не показаны).
Устройство передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки работает следующим образом.
Параметры сигналов контроля состояния рельсовой линии и кодовых сигналов автоматической локомотивной сигнализации, на базе технических средств АЛСН и АЛС-ЕН, являются применимыми при всех видах тяги.
Каждый приемопередатчик 6 сигналов КРЛ и АЛС фиксирует исправное/неисправное состояние рельсовой линии, элементов рельсовых цепей 7 и свободность/занятость перегона. В алгоритме технологического функционирования системы интервального регулирования наличие неисправности рельсовой цепи 7 фиксируется обесточиванием путевого приемника, входящего в приемопередатчик 6, и определяется как «ложная занятость», т.е. определяется не по информации о конкретном месте неисправности, а по отсутствию поезда на рельсовой линии.
Управляющим блоком 2 сигналов взаимодействия компонентов системы интервального регулирования по сигналам, поступающим на его вход/выход, через первый CAN-интерфейс связи 1, с одного входа/выхода каждого приемопередатчика 6, осуществляется контроль состояния (занятость/свободность) рельсовой линии перегона с раздельным контролем состояния каждого блок-участка и каждой рельсовой цепи 7. Эта информация, через первый CAN-интерфейс связи 1 с одного входа/выхода блока 2, поступает на вход/выход компьютера 3 автоматизированного рабочего места дежурного по станции и с другого входа/выхода, через двунаправленный оптоэлектрический преобразователь 14 интерфейсов связи и элемент 15 оптического сопряжения с магистральной оптоволоконной линией 13 цифровой связи, в саму магистральную оптоволоконную линию 13 цифровой связи и далее, через элемент 12 оптического сопряжения с магистральной оптоволоконной линией 13 цифровой связи и через двунаправленный оптоэлектрический преобразователь 11 интерфейсов связи, поступает в шины второго CAN-интерфейса связи 4 каждого из шкафов 8 напольной аппаратуры. Далее, через шины второго CAN-интерфейса связи 4 каждого из шкафов 8 напольной аппаратуры, сигналы поступают на вход/выход соответствующих блоков 5 логической реконфигурации рельсовых цепей 7.
При выявлении ложно занятой рельсовой цепи, управляющим блоком 2 сигналов взаимодействия системы интервального регулирования формируется сигнал запроса на использование режима логической реконфигурации данной рельсовой цепи 7, который через первый CAN-интерфейс связи 1, с одного входа/выхода этого блока поступает на вход/выход компьютера 3 и с другого входа/выхода, по рассмотренному выше пути, на вход/выход блока 5 логической реконфигурации рельсовых цепей 7 соответствующих групп рельсовых цепей.
Алгоритмом, программно заложенным в каждом блоке 5 ложно занятой рельсовой цепи 7, присваивается состояние логической (искусственной) свободности, при условии свободности смежных с ней рельсовых цепей 7 (одной до несправной рельсовой цепи 7 и одной после неисправной рельсовой цепи 7).
Сигнал о логически свободной рельсовой цепи 7 с входа/выхода блока 6 поступает через шины второго CAN-интерфейса связи 4 соответствующего шкафа 8 напольной аппаратуры на другой вход/выход блока 2. В системах интервального регулирования АЛСО при фиксации занятости поездом предыдущей по направлению движения рельсовой цепи через 5-10 секунд блоком 2 формируется сигнал о включении кодирования сигналами АЛС в логически свободную рельсовую цепь 7. В системах интервального регулирования с путевыми светофорами, при фиксации занятости поездом предыдущей по направлению движения рельсовой цепи через 5-10 секунд блоком 2 формируется сигнал о включении кодирования сигналами АЛС в логически свободную рельсовую цепь 7 при отсутствии проезда поездом светофора с запрещающим показанием. Этот сигнал АЛС передается с другого входа/выхода блока 2 через первый CAN-интерфейс связи 1 на один вход/выход приемопередатчика 6. С другого входа/выхода приемопередатчика 6 сигнал АЛС поступает в рельсовую линию.
В случае отсутствия передачи сигнала с входа/выхода компьютера 3 АРМ на один вход/выход блока 2 о сохранении режима логической реконфигурации, блоком 2 после освобождения рельсовой цепи 7, следующей по направлению движения, за рельсовой цепью 7 с измененным состоянием из-за логической реконфигурации, формируется сигнал автоматической отмены этого режима. Данный сигнал передается от другого входа/выхода блока 2 по рассмотренному выше пути на вход/выход соответствующего блока 5.
По сигналу отмены блоком 5, состояние логической свободности неисправной рельсовой цепи 7 преобразуется в состояние ложно занятой рельсовой цепи 7.
В случае фиксации устройством неисправного состояния рельсовой цепи 7 из-за обрыва рельсовой линии или отказа передающих устройств АЛС, также может выполняться алгоритм режима логической реконфигурации рельсовой цепи, но сигнал АЛС из рельсовой линии не будет поступать на приемное локомотивное устройство при приближении поезда. При отсутствии кодовых сигналов АЛС скорость движения регулируется в соответствии с существующим нормативным регламентом ОАО РЖД по п. 1.5 Инструкции движения поездов.
За счет размещения путевой аппаратуры рельсовых цепей 7 в шкафах 8 напольной аппаратуры, расположенных рядом с соответствующими им группами рельсовых цепей 7, существенно сокращается общая протяженность кабельных сетей, и практически снимаются ограничения, связанные с предельно допустимыми падениями напряжения, для сигнальных токов в участках кабельной сети. Это дает экономический эффект от снижения общей стоимости системы и улучшения условий работы рельсовых цепей 7 и снижения омических потерь электроэнергии. При этом также снимаются ограничения на длину перегона между станциями, и длина перегона может быть более 20 км.
Сбои и отказы в работе приемников спутниковой навигации на локомотивах (на чертеже не показаны) парируются в устройстве за счет работы программного модуля 20, который получает и использует данные о временных задержках в распространении радиосигналов от радиоприемопередатчиков 17 частотных диапазонов радиоволн УКВ, LTE к аналогичным бортовым локомотивным радиоприемопередатчикам. Для этого пакеты данных, принимаемых и передаваемых каждым радиоприемопередатчиком 17, снабжаются метками системного времени. Это позволяет компьютеру 3 автоматизированного рабочего места дежурного по станции рассчитать расстояния между любыми стационарными радиоприемопередатчиками 17 и бортовыми локомотивными радиоприемопередатчиками для конкретных моментов времени движения локомотивов и, в частности, в моменты времени интеллектуального распознавания программным модулем 19 последних вагонов, в составе проходящих поездов, по фотоизображениям этих вагонов, полученным от блоков 16 соответствующих цифровых камер видеонаблюдения. Это позволяет дополнительно контролировать следование поездов в полном составе и использовать эти данные как резервные для интервального регулирования движения при отказах в работе рельсовых цепей 7 и сбоях в работе приемников спутниковой навигации на локомотивах. При обрыве волокна в магистральной оптоволоконной линии 13 цифровой связи, связь между шкафами 8 сохраняется, через локальную сеть радиосвязи и за счет кольцевания оптоволокна. Это позволяет устройству сохранить контроль целостности рельсов посредством приема сигналов АЛС локомотивными приемниками.
Таким образом, предлагаемое устройство имеет, по сравнению с прототипом, повышенный уровень отказоустойчивости и сохраняет приемлемый уровень пропускной способности при расширенном перечне возможных неисправностей как аппаратуры на пути и на локомотивах, так и кабельных соединений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство передачи управляющих команд в рельсовые цепи централизованной системы автоблокировки | 2021 |
|
RU2754375C1 |
| Устройство для передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки | 2022 |
|
RU2783559C1 |
| Микропроцессорная система автоблокировки с децентрализованным размещением аппаратуры | 2022 |
|
RU2784240C1 |
| Устройство для передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки | 2024 |
|
RU2822695C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ УПРАВЛЯЮЩИХ КОМАНД АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ В РЕЛЬСОВЫЕ ЦЕПИ ЦЕНТРАЛИЗОВАННОЙ СИСТЕМЫ АВТОБЛОКИРОВКИ | 2009 |
|
RU2417913C1 |
| Устройство передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки | 2017 |
|
RU2644049C1 |
| Устройство для регулирования движения поездов | 2023 |
|
RU2806466C1 |
| Устройство для централизованной автоблокировки с бесстыковыми рельсовыми цепями тональной частоты | 2023 |
|
RU2817647C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491199C1 |
| УСТРОЙСТВО МИКРОПРОЦЕССОРНОЙ АВТОБЛОКИРОВКИ | 2007 |
|
RU2354574C2 |
Изобретение относится к области железнодорожной автоматики и телемеханики. Устройство передачи управляющих команд в рельсовые цепи централизованной системы автоблокировки содержит первый CAN-интерфейс связи, управляющий блок сигналов взаимодействия системы интервального регулирования и компьютер автоматизированного рабочего места (АРМ) дежурного по станции, блок радиоприемопередатчиков, расположенный рядом с компьютером АРМ, второй CAN-интерфейс связи, размещенные в отдельном шкафу напольной аппаратуры блок логической реконфигурации рельсовых цепей, приемопередатчик сигналов КРЛ и АЛС, соединенный посредством сигнального кабеля с рельсовой цепью, первый двунаправленный оптоэлектрический преобразователь, блок радиоприемопередатчиков, блок цифровых камер и блок питания. Первый двунаправленный оптоэлектрический преобразователь интерфейсов связи соединен через первый элемент оптического сопряжения с магистральной оптоволоконной линией цифровой связи, к которой через второй двунаправленный оптоэлектрический преобразователь подключен второй двунаправленный оптоэлектрический преобразователь, подключенный к первому CAN-интерфейсу связи. Технический результат изобретения заключается в повышении отказоустойчивости устройства. 1 ил.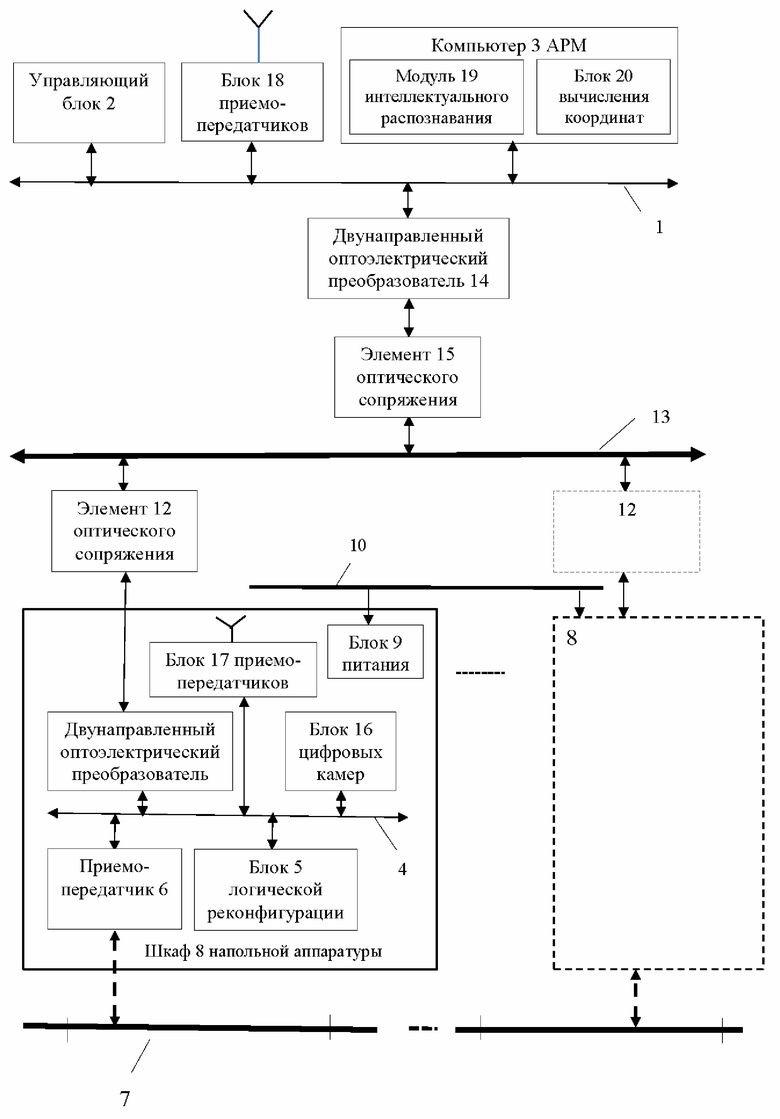
Устройство передачи управляющих команд в рельсовые цепи централизованной системы автоблокировки, содержащее первый CAN-интерфейс связи, к которому подключены управляющий блок сигналов взаимодействия системы интервального регулирования и компьютер автоматизированного рабочего места дежурного по станции, второй CAN-интерфейс связи, к которому подключены блок логической реконфигурации рельсовых цепей и приемопередатчик сигналов КРЛ и АЛС, соединенный посредством сигнального кабеля с рельсовой цепью, рельсовые цепи на перегоне между станциями разделены на группы рельсовых цепей, каждая из которых соединена с соответствующим приемопередатчиком сигналов КРЛ и АЛС, размещенным с соответствующим блоком логической реконфигурации рельсовых цепей в отдельном шкафу напольной аппаратуры, снабженном блоком силового электропитания, подключенным к двухпроводной линии продольного энергоснабжения, при этом в каждом отдельном шкафу напольной аппаратуры ко второму CAN-интерфейсу связи, к которому подключены блок логической реконфигурации рельсовых цепей и приемопередатчик сигналов КРЛ и АЛС, дополнительно подключен первый двунаправленный оптоэлектрический преобразователь интерфейсов связи, соединенный через первый элемент оптического сопряжения с магистральной оптоволоконной линией цифровой связи, проложенной вдоль железнодорожного пути, а на станции размещения компьютера автоматизированного рабочего места дежурного по станции к первому CAN-интерфейсу связи подключен второй двунаправленный оптоэлектрический преобразователь интерфейсов связи, который через второй элемент оптического сопряжения соединен с магистральной оптоволоконной линией цифровой связи, отличающееся тем, что в каждом отдельном шкафу напольной аппаратуры установлены и подключены ко второму CAN-интерфейсу связи блок цифровых камер видеонаблюдения и блок радиоприемопередатчиков частотных диапазонов радиоволн УКВ и LTE, которые объединены в локальную сеть радиосвязи с аналогичным блоком радиоприемопередатчиков, расположенным рядом с компьютером автоматизированного рабочего места дежурного по станции и подключенным к первому CAN-интерфейсу связи, при этом компьютер автоматизированного рабочего места дежурного по станции снабжен программным модулем интеллектуального распознавания последних вагонов поездов по их фотоизображениям, полученным от соответствующих блоков цифровых камер видеонаблюдения в моменты времени прохождения этих вагонов мимо соответствующих шкафов напольной аппаратуры, и программным модулем вычисления координат положения локомотивов этих же поездов в те же самые моменты времени, с использованием для этих вычислений измерения временных задержек в распространении радиосигналов от блоков радиоприемопередатчиков частотных диапазонов радиоволн УКВ и LTE к бортовым радиоприемопередатчикам локомотивов.
| Устройство передачи управляющих команд в рельсовые цепи централизованной системы автоблокировки | 2021 |
|
RU2754375C1 |
| Устройство передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки | 2017 |
|
RU2644049C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ УПРАВЛЯЮЩИХ КОМАНД АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ В РЕЛЬСОВЫЕ ЦЕПИ ЦЕНТРАЛИЗОВАННОЙ СИСТЕМЫ АВТОБЛОКИРОВКИ | 2009 |
|
RU2417913C1 |
| WO 2014032390 A1, 06.03.2014. | |||

