Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано в системах интервального регулирования и обеспечения безопасности движения поездов на перегонах скоростных, магистральных и малодеятельных участков железных дорог.
Известно устройство микропроцессорной автоблокировки, содержащее микропроцессорные блоки путевых приемников, входы которых соединены с рельсовой линией, а выходы связаны с входами блоков управления огнями путевых светофоров, сигналы от которых передаются дежурному электромеханику и диспетчеру дистанции по двухпроводной линии связи (см. Материалы Научно-внедренческого центра Московского Государственного Университета путей сообщения МПС РФ «Микропроцессорная система числовой кодовой автоблокировки АБ-ЧКЕ», Москва, 2003).
Недостатком известного устройства является использование в качестве рабочего сигнала с числовым кодом, который имеет предпосылку искажения его при совместной работе устройства с многочисленными современными устройствами поездной и путевой автоматики, что снижает эксплуатационные показатели системы автоблокировки.
Наиболее близким к заявляемому изобретению по совокупности существенных признаков и функциональным возможностям является «Устройство микропроцессорной автоблокировки», содержащее микропроцессорные приемопередатчики сигналов контроля состояния рельсовой линии (КРЛ) и автоматической локомотивной сигнализации (АЛС), связанные с рельсовой линией, с огнями путевых светофоров, со схемами электрической централизации (ЭЦ) и между собой, а также с автоматическим рабочим местом электромеханика сигнализации, централизации и блокировки (АРМ-ШН), принимающим и отображающим диагностическую информацию о техническом состоянии аппаратуры сигнальных точек и информацию о поездном положении на перегоне (см. Журнал «Автоматика, связь, информатика» №1, 2005 г., стр.31 «Микропроцессорная унифицированная система автоблокировки АБ-УЕ»).
Недостатком известного устройства является отсутствие возможности передавать в устройство управляющие команды от оператора в лице дежурного по станции (ДСП); отсутствие компонента, связанного с управлением переезда; отсутствие подключения дополнительных средств слежения за движением поездов на перегоне, например с помощью радиоканала, что отражает ограниченность функциональных возможностей устройства.
Сущность заявляемого изобретения состоит в расширении функциональных возможностей устройства микропроцессорной автоблокировки путем обеспечения формирования управляющих команд со стороны дежурного по станции, воздействующих на состояние контролируемых объектов системы автоблокировки (светофоров, переездов, на смену направления движения), а также формирования оперативной информации для дежурного по станции о текущем состоянии контролируемых объектов и о сбоях в работе устройства.
Сравнение заявленного технического решения с прототипом позволило установить его соответствие критерию «новизна», так как оно неизвестно из уровня техники. Предложенное устройство является промышленно применимым и существующими техническими средствами соответствует критерию «изобретательский уровень», так как явным образом не следует из уровня техники.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения.
Технический результат достигается тем, что «Устройство микропроцессорной автоблокировки» представляет собой открытую систему реального времени с модульной архитектурой. Модули взаимодействуют между собой посредством интерфейса CAN. Каждый модуль циклически выдает в системный интерфейс информацию о своем состоянии и результаты своей работы.
Все модули разработаны с использованием программной элементной базы.
Конструктивно устройство выполнено в виде блоков и содержит соединенные между собой двумя кабелями системного интерфейса: блок радиоканала, управляющий приемопередатчик сигналов взаимодействия компонентов системы, приемопередатчик интерфейса ЭЦ, приемопередатчик сигналов КРЛ и АЛС, станционный и перегонный приемопередатчики сигналов управления светофором, станционный и перегонный приемопередатчики сигналов управления автоматической переездной сигнализацией, приемопередатчик сигналов межстанционной связи, внутренний контрольный мониторинг, согласующее устройство, а также автоматические рабочие места дежурного по станции и электромеханика.
На чертеже представлена структурная схема «Устройства микропроцессорной автоблокировки», которое является полукомплектом централизованной микропроцессорной системы автоблокировки и содержит управляющее состоянием компонентов системы автоблокировки автоматическое рабочее место дежурного по станции (АРМ-ДСП-АБ)-1 и автоматическое рабочее место электромеханика (АРМ-ШН)-2, установленные на каждой из двух соседних станций, ограничивающих перегон. АРМ 1 соединен с аналогичным рабочим местом дежурного по станции (ДСП) на другой станции посредством модемной связи (не показано).
К входу-выходу АРМ 1 через первый CAN-интерфейс (CAN 1) подключен первый вход-выход управляющего приемопередатчика 3 сигналов взаимодействия компонентов системы.
Второй вход-выход управляющего приемопередатчика 3 через второй CAN-интерфейс (CAN 2) соединен с входом-выходом приемопередатчика 4 радиоканала, а также с одними входами-выходами других приемопередатчиков:
- приемопередатчика 5 интерфейса ЭЦ;
- приемопередатчика 6 сигналов КРЛ и АЛС;
- станционного приемопередатчика 7 сигналов управления светофором;
- станционного приемопередатчика 8 сигналов управления автоматической переездной сигнализацией (АПС);
- приемопередатчика 9 сигналов межстанционной связи.
Другой выход приемопередатчика интерфейса ЭЦ 5 соединен со схемами электрической централизации.
Другой вход-выход приемопередатчика 6 соединен с одним входом-выходом согласующего устройства 10, другой вход-выход которого подключен к рельсовой линии.
Устройство содержит несколько приемопередатчиков сигналов КРЛ и АЛС, аналогичных приемопередатчику 6, в соответствии с количеством контролируемых рельсовых цепей (на чертеже показан один из них).
Другой вход-выход станционного приемопередатчика 7 сигналов управления светофором соединен по физической цепи сигнально-блокировочного кабеля СЦБ с парной скруткой жил с одним входом-выходом перегонного приемопередатчика 11 сигналов управления светофором, установленного в трансформаторном ящике проходного светофора. Количество приемопередатчиков 11 соответствует количеству контролируемых светофоров.
Другой вход-выход станционного приемопередатчика 8 сигналов управления АПС соединен по физической линии сигнального кабеля СЦБ с одним входом-выходом перегонного приемопередатчика 12 сигналов управления АПС, выход которого связан с аппаратурой АПС.
Другой вход-выход приемопередатчика 9 сигналов межстанционной связи соединен по физической линии сигнального кабеля СЦБ с территориально удаленным полукомплектом системы автоблокировки.
Устройство работает следующим образом.
Перед включением приемопередатчиков 5, 6, 7, 8, 9, 11, 12 в микропроцессорную систему автоблокировки оператор АРМ 2 в лице электромеханика проводит их тестирование посредством диагностической программы.
Запуск диагностической программы осуществляется автоматически после включения питания компьютера, установленного на АРМ 2 (не показан). Затем оператор включает связь АРМ 2 с интерфейсом CAN 2 и с тестируемыми приемопередатчиками, установленными на стативе размещения станционной аппаратуры.
Оператор включает питание приемопередатчиков 6 сигналов КРЛ и АЛС, связанных с рельсовой линией (на чертеже показан один из них). Посредством вышеупомянутой программы настраивает и записывает постоянные их параметры.
Данная программа позволяет настроить приемопередатчики 6 и отобразить информацию о состоянии и других интересующих компонентов, входящих в систему (3, 5, 7, 8, 9, 11, 12), создавать протоколы сведений о возникающих при эксплуатации ситуациях, внештатно воздействовать на функционирование отдельных компонентов.
Оператор запускает программно-циклическую выдачу сообщений приемопередатчиков 6, входящих в текущую конфигурацию системы, и убеждается в отображении на мониторе компьютера заданного состояния автоблокировки. Диагностическая информация собирается и архивируется в АРМ 2 для анализа работы устройства и каждого приемопередатчика в отдельности в любой момент времени при отсутствии нарушений в работе устройства и при возникновении каких-либо отказов и сбоев. Сообщения о возникновении отказов в устройстве выводятся и на АРМ 1.
Приемопередатчик 6 сигналов КРЛ и АЛС формирует на выходе (другого входа-выхода) комплексный (групповой) сигнал для контроля и кодирования двух соседних бесстыковых рельсовых цепей. Сигнал КРЛ поступает в рельсовую линию через усилитель мощности (на чертеже не показан) и согласующее устройство 10 питающего конца указанных рельсовых цепей.
С приемных концов рельсовых цепей через согласующие устройства и кабельную линию сигнал КРЛ подается на вход (другого входа-выхода) приемопередатчика 6. Приемопередатчик 6 оценивает уровень входного сигнала и его принадлежность по частотному и кодовому признакам и определяет состояние рельсовых цепей. Через интерфейс CAN2 эта информация поступает на второй вход-выход управляющего приемопередатчика 3 сигналов взаимодействия компонентов системы.
Приемопередатчик 3 на основе информации, получаемой от аналогичного ему приемопередатчика второго полукомплекта на соседней станции и от приемопередатчиков 6 своего полукомплекта, контролирует проследование поезда с логическим контролем освобождения блок-участков перегона. Данные от соседней станции передаются на приемопередатчик 3 через приемопередатчик 9 сигналов межстанционной связи и межстанционную кабельную линию.
Приемопередатчик 3 при помощи приемопередатчиков 7 и 11 управляет показаниями путевых светофоров. С приемопередатчика 7 на приемопередатчик 11 через канал связи передаются сигналы управления (включения и выключения сигнальных показаний на путевом светофоре), с приемопередатчика 11 на приемопередатчик 7 - контрольная и диагностическая информация (состояние нитей ламп светофора и результаты самодиагностики приемопередатчика 11).
Формирование и передача на локомотив информации о поездной ситуации по каналам АЛСН и/или АЛС-ЕН осуществляется приемопередатчиками 6 по командам, подаваемым с приемопередатчика 3 в соответствии с поездной обстановкой. Приемопередатчик 4 радиоканала исполняет функции кодирования рельсовых цепей при наличии на участке локомотивов, оборудованных соответствующей аппаратурой.
Приемопередатчик 3 с использованием приемопередатчика 12 управляет аппаратурой автоматической переездной сигнализации (АПС) и контролирует ее состояние. Канал связи между приемопередатчиками 3 и 12 организован через приемопередатчик 8. На приемопередатчик 12 от приемопередатчика 8 передаются команды управления переездом (включение/выключение АПС), а в обратном направлении - контрольная и диагностическая информация.
Приемопередатчик 3 осуществляет взаимодействие с аппаратурой ЭЦ с помощью приемопередатчика 5. Данные о свободности/занятости участков приближения/удаления, контроль перегона, установленное направление движения, показания сигнальных точек по удалению являются информацией, поступающей от устройства микропроцессорной автоблокировки на аппаратуру ЭЦ. От ЭЦ на устройство микропроцессорной автоблокировки передается информация о показании входного светофора, режиме пропуска поезда по станции и команды смены направления движения, задания режима горения ламп на проходных светофорах, разблокирования перегона.
Управляющие команды оператора АРМ 1 формируются программно. Запуск программы происходит автоматически при включении электропитания компьютера. В рабочем окне монитора АРМ 1 (на чертеже на показано) отображается план перегона/станции. Оператор выбирает план конкретного перегона/станции и по необходимости настраивает программу и устанавливает номер приемопередатчика 3 своей и соседней станции, а также количество компонентов, входящих в конфигурацию автоблокировки на контролируемом перегоне/станции.
Посредством рабочего окна оператор получает возможность:
- принять информацию от устройства автоблокировки о текущем состоянии контролируемых перегонных и станционных объектов, входящих в его конфигурацию, и от АРМ 2;
- осуществить просмотр сообщений о событиях, произошедших в устройстве, например: попытка смены направления, попытка блокировки светофора, попытка перезапуска переезда и т.д.;
- осуществить просмотр сообщений о каждой неисправности (перегорание лампы светофора, ошибка в канале связи, неисправность переезда, ложная занятость и логическая занятость рельсовой цепи, пропадание связи).
Оперативная информация на АРМ 1 поступает с первого входа-выхода приемопередатчика 3.
Таким образом, взаимодействие АРМ 1 с приемопередатчиками устройства через интерфейсы CAN и приемопередатчик 3 обеспечивает выполнение достаточно широкого спектра функций контроля и управления технологическим процессом движения поездов на перегоне, что повышает достоверность информации о движении поезда по перегону и дает возможность прогнозировать поездную ситуацию на перегоне.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2521066C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491199C1 |
| СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДА НА ПЕРЕГОНЕ | 2014 |
|
RU2548645C1 |
| Устройство для регулирования движения поездов | 2023 |
|
RU2806466C1 |
| Устройство передачи управляющих команд в рельсовые цепи централизованной системы автоблокировки | 2021 |
|
RU2754375C1 |
| Устройство для регулирования движения поездов | 2018 |
|
RU2679795C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| Микропроцессорная система автоблокировки с децентрализованным размещением аппаратуры | 2022 |
|
RU2784240C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ УПРАВЛЯЮЩИХ КОМАНД АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ В РЕЛЬСОВЫЕ ЦЕПИ ЦЕНТРАЛИЗОВАННОЙ СИСТЕМЫ АВТОБЛОКИРОВКИ | 2009 |
|
RU2417913C1 |
| Устройство для передачи управляющих команд автоматической локомотивной сигнализации в рельсовые цепи централизованной системы автоблокировки | 2022 |
|
RU2783559C1 |
Устройство относится к области железнодорожной автоматики и телемеханики и предназначено для обеспечения безопасности и регулирования движения поездов на перегонах скоростных, магистральных и малодеятельных участков железных дорог, оборудованных системами электротяги постоянного или переменного тока или системой автономной тяги, участков с централизованным электроснабжением пассажирских вагонов, участков обращения локомотивов и мотор-вагонного подвижного состава с импульсным регулированием тяговых двигателей, линий высокоскоростного движения, строящихся и модернизируемых линий. Устройство содержит автоматическое рабочее место дежурного по станции (ДСП) на базе ПЭВМ, модем для связи с соседней станцией, антенны радиоканала и антенно-фидерного устройства для радиомодема, радиомодем для передачи цифровой информации по радиоканалу. Устройство формирует управляющие команды со стороны ДСП на включение запрещающего показания на любом путевом светофоре, на включение запрещающего показания на ближайших к переезду путевых светофорах при включении заградительной сигнализации, на деблокирование запрещающего сигнала путевого светофора, который им был включен ранее или заблокировавшегося из-за нарушения алгоритма работы автоблокировки, а также формирует оперативную информацию для ДСП о текущем состоянии контролируемых объектов и сообщения о сбоях в работе системы автоблокировки. Изобретение позволяет расширить функциональные возможности микропроцессорной системы автоблокировки. 1 ил.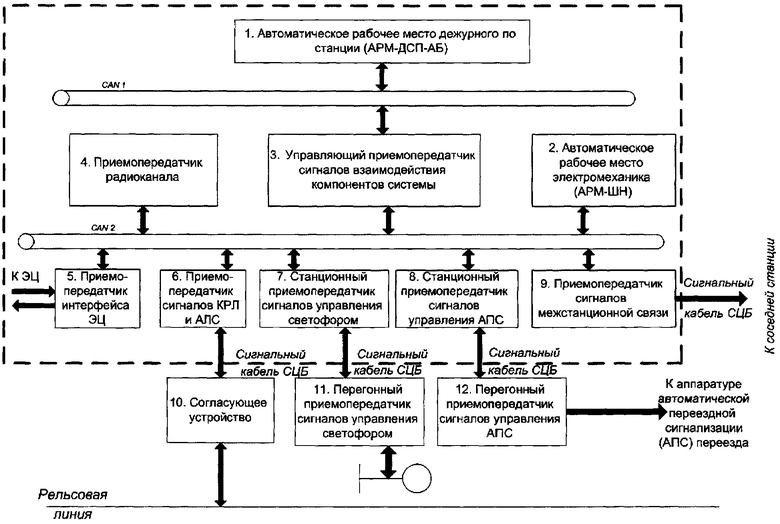
Устройство микропроцессорной автоблокировки, содержащее микропроцессорные приемопередатчики сигналов контроля состояния рельсовой линии и автоматической локомотивной сигнализации, связанные с рельсовой линией, с огнями путевых светофоров, со схемами электрической централизации и между собой, а также с автоматическим рабочим местом электромеханика, которое принимает и отображает диагностическую информацию о техническом состоянии аппаратуры сигнальных точек и информацию о поездном положении на перегоне, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено автоматическим рабочим местом дежурного по станции, CAN-интерфейсами, станционным и перегонным приемопередатчиками сигналов управления автоматической переездной сигнализации, приемопередатчиком радиоканала и управляющим приемопередатчиком сигналов взаимодействия компонентов системы, один вход-выход которого через один CAN-интерфейс подключен к входу-выходу автоматического рабочего места дежурного по станции, а другой вход-выход через другой CAN-интерфейс соединен с одним входом-выходом станционного приемопередатчика сигналов управления автоматической переездной сигнализации, с входом-выходом приемопередатчика радиоканала, с входом-выходом автоматического рабочего места электромеханика и с входами-выходами вышеупомянутых приемопередатчиков сигналов контроля состояния рельсовой линии и автоматической локомотивной сигнализации, а другой вход-выход станционного приемопередатчика сигналов автоматической переездной сигнализации соединен с входом-выходом перегонного приемопередатчика сигналов автоматической переездной сигнализации, выход которого связан с аппаратурой переезда.
| Автоматический многопильный станок для распиловки сахарных голов | 1933 |
|
SU40284A1 |
| RU 2004116200 A, 10.11.2005 | |||
| Сушильный барабан | 1936 |
|
SU51955A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ | 2004 |
|
RU2263599C1 |

