Изобретение относится к области фотодетектирования и построения изображений с помощью полупроводниковых фотоприемников, в том числе в инфракрасном и терагерцовом спектральных диапазонах, востребованных для задач тепловидения, термографии и дистанционной диагностики состава объектов.
Современный уровень техники в данной области характеризуется тем, что матричные фотодетекторы обычно размещаются над кремниевой интегральной схемой отдельным слоем. В случае детекторов, основанных на кремнии, это приводит к увеличению количества слоев интегральной схемы (ИС) и, как следствие, повышению трудоемкости и удорожанию производства. В случае не кремниевых детекторов на основе твердых растворов соединений (AIIIBV, AIIBVI) подключение к кремниевой ИС требует дополнительной процедуры совмещения пластин и микропайки, что является еще более трудозатратной операцией. Сама ИС коммутации и считывания осуществляет адресацию к детекторам и считывание их фототоков или фотонапряжений. Адресация может выполняться как к отдельным детекторам в матрице, так и к строкам и столбцам, в которые эти детекторы объединены (cross-bar архитектура). В случае cross-bar архитектуры уменьшается количество шин, подводимых к матрице детекторов (оно растет линейно с размером матрицы, вместо квадратичного роста при индивидуальной адресации). Однако в cross-bar архитектуре и детекторах с линейной вольтамперной характеристикой (ВАХ) невозможна адресация к данному конкретному детектору. Это происходит из-за паразитных путей растекания тока (sneak paths) по сетке строк и столбцов. Решение этой проблемы возможно лишь, если детектор обладает сильно нелинейной (диодной) ВАХ или при подключении к детектору последовательного запирающего диода. Опять же, это приводит к усложнению и удорожанию конструкции, особенно если сам фоточувствительный элемент не обладает диодной характеристикой. Этот случай реализуется для болометрических детекторов на основе полупроводников (кремниевые, германиевые и подобные болометры), на основе оксидов переходных металлов (болометры на диоксиде ванадия), а также для детекторов на основе явления фотопроводимости (photoconductors).
Известен матричный фотодетектор, в котором матрица фоточувствительных элементов (МФЧЭ) изготавливается на основе узкозонных полупроводников (например, InSb), эффективно преобразующих ИК излучение соответствующего диапазона длин волн в электрический сигнал, обработка (накопление, усиление и трансляция сигнала потребителям) осуществляется с помощью кремниевой большой интегральной схемы (БИС), приемная часть которой также имеет матричную структуру, соответствующую МФЧЭ, и объединяется с последней посредством индиевых микростолбиков (Патент РФ №55206 U1, МПК H01L 31/0296, опубл. 27.07.2006).
К недостаткам аналога следует отнести высокие трудоемкость и стоимость производства, обусловленные низкой технологичностью конструкции матричного фотодетектора из-за необходимости послойного изготовления МФЧЭ и БИС и их объединения посредством индиевых микростолбиков.
Наиболее близким к заявленному - прототипом - является матричный фотодетектор, содержащий функционально связанные размещенную на подложке матрицу фоторезистивных датчиков с управляемыми контактами, набор шин, включающий подключенную к заземленному источнику постоянного тока шину подвода электрического тока и подключенную к средству измерения и обработки шину выходного потенциала, мультиплексор, обеспечивающий подключение управляемых контактов к разным шинам, и управляющий контроллер, задающий последовательность подключения управляемых контактов к разным шинам (Патент JP №4876304 В2, МПК: G01J 1/02, выд. 09.12.2011).
К недостаткам прототипа следует отнести низкую технологичность конструкции матричного фотодетектора из-за необходимости изготовления матрицы фоторезистивных датчиков и интегральной микросхемы считывания в разных слоях с их последующим совмещением и коммутацией.
Проблема, решаемая настоящим изобретением, - реализация полностью планарного матричного фотодетектора, т.е. фотодетектора, в котором все элементы расположены в одном слое интегральной микросхемы и не требуют технически сложной операции совмещения и коммутации матрицы фоторезистивных датчиков и интегральной схемы считывания.
Технический результат - повышение технологичности конструкции матричного фотодетектора.
Выявленная проблема решается, а заявленный технический результат достигается тем, что в матричном фотодетекторе, содержащем функционально связанные размещенную на подложке матрицу фоторезистивных датчиков с управляемыми контактами, набор шин, включающий подключенную к заземленному источнику постоянного тока шину подвода электрического тока и подключенную к средству измерения и обработки шину выходного потенциала, мультиплексор, обеспечивающий подключение управляемых контактов к разным шинам, и управляющий контроллер, задающий последовательность подключения управляемых контактов к разным шинам, фоторезистивные датчики в составе матрицы электрически соединены друг с другом с образованием структуры из неприводимых блоков, набор шин дополнительно содержит подключенную к средству измерения и обработки шину заземления, а управляемыми контактами оснащены периферийные соединения фоторезистивных датчиков с соблюдением условия: с  , где с - количество фоторезистивных датчиков в составе матрицы; s - количество периферийных соединений фоторезистивных датчиков, оснащенных управляемыми контактами, при этом в качестве структур из неприводимых блоков могут быть использованы периодические структуры с прямоугольной элементарной ячейкой, с треугольной элементарной ячейкой, с гексагональной элементарной ячейкой, а в качестве фоторезистивных датчиков могут быть использованы болометры или фотопроводники.
, где с - количество фоторезистивных датчиков в составе матрицы; s - количество периферийных соединений фоторезистивных датчиков, оснащенных управляемыми контактами, при этом в качестве структур из неприводимых блоков могут быть использованы периодические структуры с прямоугольной элементарной ячейкой, с треугольной элементарной ячейкой, с гексагональной элементарной ячейкой, а в качестве фоторезистивных датчиков могут быть использованы болометры или фотопроводники.
Изобретение поясняется изображениями, на которых представлены:
Фиг. 1 - пример схемы предлагаемого матричного фотодетектора с прямоугольной элементарной ячейкой матрицы;
Фиг. 2 - пример матрицы с треугольной элементарной ячейкой;
Фиг. 3 - пример матрицы с гексагональной элементарной ячейкой;
Фиг. 4 - пояснение обозначений, используемых в алгоритме восстановления сопротивлений детекторов в примере матрицы с прямоугольной элементарной ячейкой по измерениям потенциалов на периметре;
Фиг. 5 - электрическая схема сетки сопротивлений, использованной для проверки;
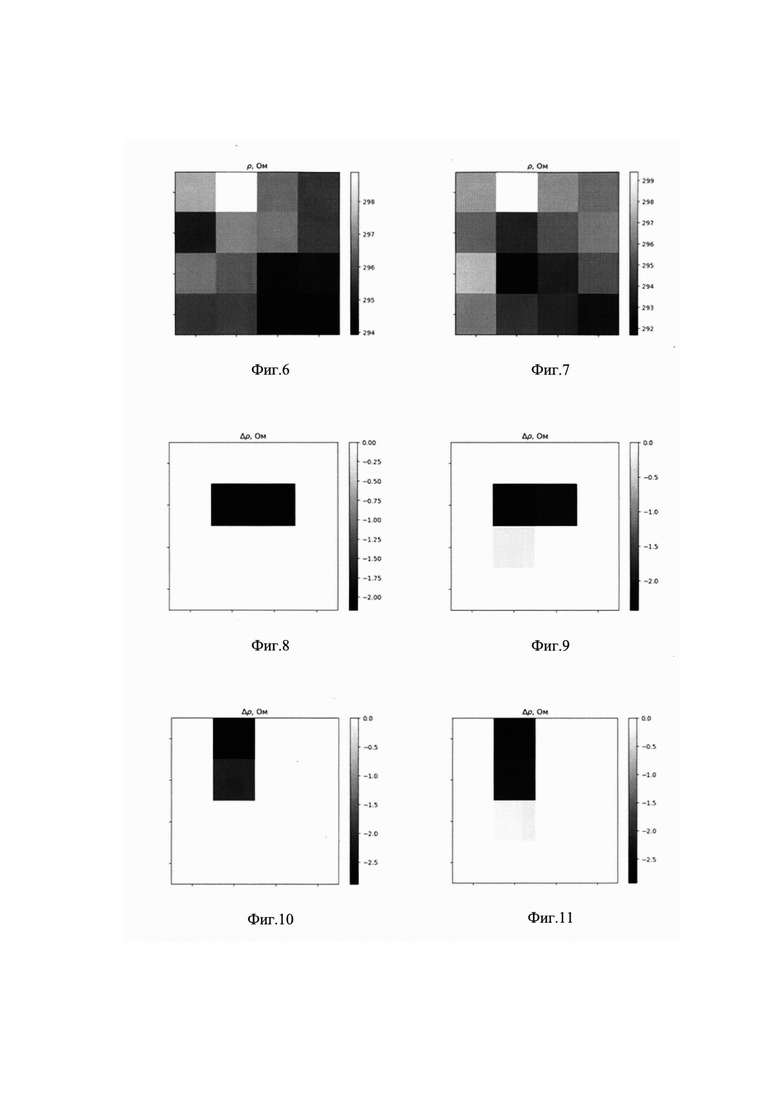
Фиг. 6 - изображение базовой схемы с корректными номиналами до подстройки;
Фиг. 7 - изображение базовой схемы, восстановленное по измерениям потенциалов на периметре;
Фиг. 8 - изображение схемы с корректными номиналами после изменения сопротивления второго резистора в третьей строке на -8.68 Ом;
Фиг. 9 - восстановленное изображение схемы после изменения сопротивления второго резистора в третьей строке на -8.68 Ом;
Фиг. 10 - изображение схемы с корректными номиналами после изменения сопротивления второго резистора во второй строке на -8.65 Ом;
Фиг. 11 - восстановленное изображение схемы после изменения сопротивления второго резистора во второй строке на -8.65 Ом.
Компоненты, входящие в состав заявленного матричного фотодетектора, обозначены следующими индексами:
1 - фоторезистивный датчик (болометр, фотопроводник);
2 - цифровой мультиплексор;
3 - контроллер (микроконтроллер);
4 - источник тока;
5 - заземление;
6 - шина подвода электрического тока;
7 - шина выходного потенциала;
8 - шина заземления;
9 - шина управления;
10 - подложка;
11 - управляемые контакты.
В соответствии с заявленным техническим решением, матричный фотодетектор содержит функционально связанные размещенную на подложке 10 матрицу фоторезистивных датчиков 1 с управляемыми контактами 11, набор шин, включающий подключенную к заземленному источнику тока шину 6 подвода электрического тока, подключенную к средству измерения и обработки (например, к вольтметру с аналогово-цифровым преобразователем в составе контроллера (микроконтроллера) 3) шину 7 выходного потенциала и подключенную к контроллеру 3 шину заземления. Управляемые контакты 11 выведены на внешний цифровой мультиплексор 2, обеспечивающий подключение управляемых контактов 11 к разным шинам (6, 7, 8). Управляющий контроллер 3 через шину управления 9 задает мультиплексору 2 последовательность подключения управляемых контактов 11 к разным шинам (6, 7, 8). Фоторезистивные датчики 1 в составе матрицы электрически соединены друг с другом с образованием структуры из неприводимых блоков. Примеры таких структур описаны в зависимых пунктах 2, 3 и 4 формулы изобретения и проиллюстрированы на Фиг. 1, Фиг. 2 и Фиг. 3. Поясним, что под неприводимыми блоками понимаются группы находящихся рядом датчиков, которые нельзя заменить одним эквивалентным сопротивлением без изменения токов и потенциалов на периметре схемы. Управляемыми контактами (это контакты, выводимые на внешний мультиплексор 2 для управляемого соединения с шинами 6 или 7 или 8) оснащены периферийные соединения фоторезистивных датчиков 1 в количестве, определяемом из условия:  , где с - количество фоторезистивных датчиков в составе матрицы; s -количество периферийных соединений фоторезистивных датчиков, оснащенных управляемыми контактами. Сразу поясним, что, с учетом проведенных исследований и расчетов, в качестве структур из неприводимых блоков могут быть использованы периодические структуры с прямоугольной элементарной ячейкой, с треугольной элементарной ячейкой, с гексагональной элементарной ячейкой, а в качестве фоторезистивных датчиков могут быть использованы болометры или фотопроводники.
, где с - количество фоторезистивных датчиков в составе матрицы; s -количество периферийных соединений фоторезистивных датчиков, оснащенных управляемыми контактами. Сразу поясним, что, с учетом проведенных исследований и расчетов, в качестве структур из неприводимых блоков могут быть использованы периодические структуры с прямоугольной элементарной ячейкой, с треугольной элементарной ячейкой, с гексагональной элементарной ячейкой, а в качестве фоторезистивных датчиков могут быть использованы болометры или фотопроводники.
Как это следует из представленных материалов, ключевой особенностью заявленного технического решения является то, что в местах пересечения (узлах) контактов «строковых» и «столбцовых» фоторезистивных датчиков выполняется электрическое соединение и, таким образом, составляющие матрицу фоторезистивные датчики размещаются в одном слое с интегральной схемой считывания, объединяясь проводниками в периодическую структуру с учетом изложенных выше требований. При этом, как это будет показано в примерах ниже, сопротивление всех фоторезистивных датчиков, в том числе измененное сопротивление при освещении, может быть восстановлено по измерениям, затрагивающим лишь узлы на периметре матрицы. Принцип восстановления аналогичен методу томографии электрических сопротивлений, впервые предложенному в контексте измерения распределения электропроводности в теле человека для медицинской диагностики [обзор метода дан в работе М. Cheney, D. Isaacson, and J.С.Newell. Electrical Impedance Tomography, SIAM Rev. 41, 85 (1999)]. В этом методе между различными парами точек на периметре подключается источник тока, а между иными парами точек происходит измерение падения напряжения. Остальные точки схемы при таком измерении остаются электрически изолированными, т.е. их потенциал является плавающим. Измеренный массив падений напряжения, нормированных на ток источника (массив нелокальных сопротивлений) применяется для численного восстановления значений всех сопротивлений в матрице. Это восстановление выполнимо однозначным образом, если число измеренных нелокальных сопротивлений больше числа использованных фоторезистивных датчиков, что достигается в заявленном техническом решении соблюдением условия:  . Таким образом, заявленное техническое решение позволяет реализовать матричный детектор, исключив необходимость совмещения и/или микро-пайки матрицы фоторезистивных датчиков и интегральной схемы считывания.
. Таким образом, заявленное техническое решение позволяет реализовать матричный детектор, исключив необходимость совмещения и/или микро-пайки матрицы фоторезистивных датчиков и интегральной схемы считывания.
Реализацию и работу заявленного технического решения рассмотрим на примере матричного фотодетектора, в котором в качестве структур из неприводимых блоков использована периодическая структура с прямоугольной элементарной ячейкой в соответствии с Фиг. 1, Фиг. 4, Фиг. 5. Здесь отдельные фоторезистивные датчики 1 (в их качестве могут использоваться болометры или фотопроводники) объединены в плоскую решетку с прямоугольной (частный случай - квадратной) элементарной ячейкой. Мультиплексор 2 выполняет коммутацию узлов на периметре схемы, оснащенных управляемыми контактами 11, либо с шиной 8 заземления, либо с шиной 6 от источника постоянного тока 4, либо с шиной 7 измерения выходного потенциала (относительно земли). Для подачи тока смещения между двумя точками (периферийными узлами) схемы одна из них заземляется, а вторая подключается к источнику тока - ток втекает из источника 4 и утекает в точку заземления 5. Микроконтроллер 3 управляет коммутацией по заранее выбранному алгоритму. Также в состав контроллера 3 входит вольтметр и аналогово-цифровой преобразователь, реализующие функцию измерения потенциалов на периметре схемы. Отметим, что подключение всех узлов на периметре схемы к мультиплексору 2 не является обязательным. Достаточно подключения числа управляемых контактов 11, много меньшего, чем полное число электрически неэквивалентных точек (узлов) на периметре. Ниже мы покажем, что это требование эквивалентно выполнению условия  На Фиг. 1, для примера, показано подключение мультиплексора только к верхней и правой сторонам матрицы, чего более чем достаточно.
На Фиг. 1, для примера, показано подключение мультиплексора только к верхней и правой сторонам матрицы, чего более чем достаточно.
Опишем теперь принцип построения плоского изображения при указанном типе соединения фоторезистивных датчиков (далее - датчиков) 1. В конечном счете, построение изображения сводится к прецизионному определению электрических сопротивлений всех датчиков 1, составляющих матрицу. Действительно, облучение датчика световой мощностью Р приводит к изменению сопротивления R вида

R0 - темновое сопротивление;
 - чувствительность относительного сопротивления к световой мощности.
- чувствительность относительного сопротивления к световой мощности.
Таким образом, необходим поиск распределения мощности всех сопротивлений при освещении  и в темноте
и в темноте  Шляпка над символом сопротивления означает, что указанные величины формируют двумерный массив. Опишем далее реализацию прецизионного измерения всех сопротивлений. Для начала введем обозначения и нумерацию элементов матрицы. Если на стороне матрицы расположено по N датчиков 1, то полное число датчиков в матрице равно s=2N(N+l), а число электрически неэквивалентных точек (узлов) на периметре равно cmax=AN (обозначения s от англ. «sensors» и с от англ. «contacts»). Будем нумеровать все электрически неэквивалентные точки на периметре матрицы по часовой стрелке, а левый верхний угол примем за первую точку. Для нумерации точек на периметре используем индексы k, l, m. Узлы внутри схемы будем нумеровать двумя индексами {ij}, где i - номер строки, j - номер столбца. Нумерация строк идет снизу вверх, нумерация столбцов - слева направо. Все сопротивления в матрице разделим на строковые RL (L - longitudinal) и столбцовые RT (T - transverse). Обозначение
Шляпка над символом сопротивления означает, что указанные величины формируют двумерный массив. Опишем далее реализацию прецизионного измерения всех сопротивлений. Для начала введем обозначения и нумерацию элементов матрицы. Если на стороне матрицы расположено по N датчиков 1, то полное число датчиков в матрице равно s=2N(N+l), а число электрически неэквивалентных точек (узлов) на периметре равно cmax=AN (обозначения s от англ. «sensors» и с от англ. «contacts»). Будем нумеровать все электрически неэквивалентные точки на периметре матрицы по часовой стрелке, а левый верхний угол примем за первую точку. Для нумерации точек на периметре используем индексы k, l, m. Узлы внутри схемы будем нумеровать двумя индексами {ij}, где i - номер строки, j - номер столбца. Нумерация строк идет снизу вверх, нумерация столбцов - слева направо. Все сопротивления в матрице разделим на строковые RL (L - longitudinal) и столбцовые RT (T - transverse). Обозначение  означает строковый резистор, размещенный в i-й строке между столбцами j и j+1 Аналогично
означает строковый резистор, размещенный в i-й строке между столбцами j и j+1 Аналогично  означает столбцовый резистор, размещенный в j-м столбце между строками i и i+1. Введенные обозначения пояснены на Фиг. 4. В процессе измерения заземлим произвольную точку с номером k на периметре, а точку l подключим к источнику тока Ib. Ток потечет между k-й и l-й точками схемы. Для каждой пары токовых контактов {k,l} измеряется распределение наведенных потенциалов на периметре матрицы относительно k-го заземленного контакта. Эти потенциалы мы обозначим как
означает столбцовый резистор, размещенный в j-м столбце между строками i и i+1. Введенные обозначения пояснены на Фиг. 4. В процессе измерения заземлим произвольную точку с номером k на периметре, а точку l подключим к источнику тока Ib. Ток потечет между k-й и l-й точками схемы. Для каждой пары токовых контактов {k,l} измеряется распределение наведенных потенциалов на периметре матрицы относительно k-го заземленного контакта. Эти потенциалы мы обозначим как  где верхние индексы kl показывают, между какими контактами пропускается ток, а нижние mk - между какими происходит измерение разности потенциалов. Путем нормировки на ток источника получаем набор измеренных нелокальных сопротивлений
где верхние индексы kl показывают, между какими контактами пропускается ток, а нижние mk - между какими происходит измерение разности потенциалов. Путем нормировки на ток источника получаем набор измеренных нелокальных сопротивлений

Здесь индекс ехр подчеркивает, что эти величины измерены экспериментально. Повторим описанное выше измерение, выбирая иную пару токовых контактов {k,l}. Можно показать, что при полном переборе токовых и потенциальных контактов {k,l,m} количество неэквивалентных измеренных нелокальных сопротивлений  окажется равным:
окажется равным:

где множитель с берется от числа возможностей выбора первой точки заземления, множитель с - 1 - от числа возможностей выбора второй точки для подачи тока смещения, множитель с - 2 - от числа возможностей выбора точек для измерения наведенных потенциалов, а деление на два учитывает принцип взаимности - замена потенциальных и токовых терминалов должна давать то же измеренное значение сопротивления. Видно, что если каждый электрический контакт на периметре использовать для измерений, т.е. c=cmax=4N, то количество измеряемых нелокальных сопротивлений окажется больше, чем число s датчиков 1, сопротивление которых мы планируем узнать. Иначе говоря, Mmax>2N(N+l), то есть измеряемой информации достаточно (и даже с избытком) для построения изображения. Цикл перебора токовых и измерительных контактов может быть остановлен при достижении числа измерений М=2N(N+1). Однако это требование является необязательным, и в описываемом нами алгоритме избыточная информация может использоваться для минимизации ошибок. С другой стороны, число точек на периметре, используемых для измерения может быть меньше, чем cmax=4N. Из (3) следует, что достаточно взять число измерительных контактов

тогда путем описанного полного перебора мы получим массив нелокальных сопротивлений с длиной большей, чем число датчиков.
Для дальнейшего определения всех сопротивлений в матрице детекторов  рассчитаем нелокальные сопротивления теоретически с помощью модели на основе уравнений Кирхгофа. Таким образом, сформируем массив
рассчитаем нелокальные сопротивления теоретически с помощью модели на основе уравнений Кирхгофа. Таким образом, сформируем массив  Аргумент
Аргумент  у этой величины означает, что каждое нелокальное сопротивление из массива зависит от всех сопротивлений в матрице детекторов. Наконец, выполним минимизацию среднеквадратичного отклонения
у этой величины означает, что каждое нелокальное сопротивление из массива зависит от всех сопротивлений в матрице детекторов. Наконец, выполним минимизацию среднеквадратичного отклонения

по всем возможным сопротивлениям в массиве, количество которых равно 2N(N+1). Величина  для которой достигается минимум среднеквадратичного отклонения
для которой достигается минимум среднеквадратичного отклонения  как раз дает требуемое распределение сопротивлений. Определение модельных нелокальных сопротивлений
как раз дает требуемое распределение сопротивлений. Определение модельных нелокальных сопротивлений  сводится к решению системы уравнений Кирхгофа на потенциалы в узловых точках матрицы при единичном токе-источнике. Для определения потенциала ϕij во внутренних точках имеем систему уравнений
сводится к решению системы уравнений Кирхгофа на потенциалы в узловых точках матрицы при единичном токе-источнике. Для определения потенциала ϕij во внутренних точках имеем систему уравнений

где 2≤i≤n, 2≤j≤N. Для точек на периметре уравнение (6) очевидным образом модифицируется. Например, если точка с номером j=l на верхней стороне матрицы (i=1) подключена к источнику тока Ib, то для этой точки уравнение Кирхгофа запишется в виде:

Далее, если точка с номером j=k на верхней стороне матрицы (i=1) заземлена, то для этой точки уравнение Кирхгофа запишется в виде:

Для потенциальных точек {i,j} (т.е. таких, через которые ток не течет, а потенциал измеряется) на верхней стороне матрицы (i=1) уравнение Кирхгофа записывается в виде:

Обобщение граничных уравнений (7) - (9) на случай правой (j=N+1), левой (j=1) и нижней (i=N+1) границ не представляет труда. Прямое численное решение линейной системы уравнений Кирхгофа (6) - (9) позволяет найти потенциалы ϕij во всех точках матрицы, в том числе в граничных точках, где потенциал может быть измерен. Нормируя эти потенциалы на ток смещения Ib, мы получаем модельные значения нелокальных сопротивлений  .
.
Таким образом, решена прямая задача поиска нелокальных сопротивлений  при фиксированной матрице сопротивлений
при фиксированной матрице сопротивлений  и подключении источника тока между точками k и l и измерении потенциала между точками m и k. Обратная задача минимизации среднеквадратичного отклонения (5) по всем возможным наборам сопротивлений
и подключении источника тока между точками k и l и измерении потенциала между точками m и k. Обратная задача минимизации среднеквадратичного отклонения (5) по всем возможным наборам сопротивлений  решается численно методом Ньютона-Рафсона. Существуют и более сложные методы восстановления сопротивлений по известным потенциалам на периметре [описаны в работе Т.J. Yorkey, J.G. Webster, and W.J. Tompkins. Comparing Reconstruction Algorithms for Electrical Impedance Tomography, IEEE Trans. Biomed. Eng. BME-34, 843 (1987)]. Однако метод Ньютона-Рафсона хорошо работает, если «начальная догадка» о значениях сопротивления близка к измеряемым значениям сопротивления. В качестве начальной догадки удобно положить все сопротивления равными друг другу и равными
решается численно методом Ньютона-Рафсона. Существуют и более сложные методы восстановления сопротивлений по известным потенциалам на периметре [описаны в работе Т.J. Yorkey, J.G. Webster, and W.J. Tompkins. Comparing Reconstruction Algorithms for Electrical Impedance Tomography, IEEE Trans. Biomed. Eng. BME-34, 843 (1987)]. Однако метод Ньютона-Рафсона хорошо работает, если «начальная догадка» о значениях сопротивления близка к измеряемым значениям сопротивления. В качестве начальной догадки удобно положить все сопротивления равными друг другу и равными  удельное сопротивление материала фоточувствительного элемента, L - длина фоточувствительного элемента, S - площадь его поперечного сечения.
удельное сопротивление материала фоточувствительного элемента, L - длина фоточувствительного элемента, S - площадь его поперечного сечения.
Достижение технического результата было продемонстрировано путем экспериментальной реализации прецизионного измерения сопротивлений резисторов, соединенных в планарную сетку с прямоугольной элементарной ячейкой. При этом, как и в заявляемой конструкции матричного фотодетектора, измерения потенциалов велись только на контактах по периметру матрицы. Была собрана схема с N=3 резисторами по стороне, каждый из которых имел номинал R0=300 Ом и относительный разброс сопротивления ±15 Ом. Конкретные значения сопротивлений, полученные путем предварительной калибровки отдельных резисторов, указаны на Фиг. 5. Имитация источника тока достигалась путем подачи напряжения 0,1 В от источника постоянного напряжения через нагрузочный резистор 1 МОм, что дает величину тока смещения Ib=100 нА. Измерения разности потенциалов на периметре выполнялись с помощью нановольтметра. Коммутация электрических соединений на периметре осуществлялась с помощью самостоятельно собранного программно-управляемого мультиплексора на основе твердотельных переключателей. Использовалось измерение потенциалов на периметре (нелокальных сопротивлений  при 30 различных коммутациях схемы, что превышает полное количество измеряемых сопротивлений резисторов 2N(N+X)=2A. Экспериментально измеренные нелокальные сопротивления обрабатывались согласно описанному выше алгоритму резистивной томографии. Полученная матрица сопротивлений
при 30 различных коммутациях схемы, что превышает полное количество измеряемых сопротивлений резисторов 2N(N+X)=2A. Экспериментально измеренные нелокальные сопротивления обрабатывались согласно описанному выше алгоритму резистивной томографии. Полученная матрица сопротивлений  далее сравнивалась с известными сопротивлениями отдельных резисторов, аттестованными на этапе сборки схемы. Для удобства визуализации каждой матрице сопротивлений
далее сравнивалась с известными сопротивлениями отдельных резисторов, аттестованными на этапе сборки схемы. Для удобства визуализации каждой матрице сопротивлений  мы ставим в соответствие изображение по следующему принципу. Каждому узлу сетки резисторов назначается число
мы ставим в соответствие изображение по следующему принципу. Каждому узлу сетки резисторов назначается число  , равное среднему от всех сопротивлений резисторов, прилегающих к этому узлу
, равное среднему от всех сопротивлений резисторов, прилегающих к этому узлу

для узлов на боковых сторонах число усредняемых сопротивлений равно трем, а для узлов в углах - двум. Далее каждой величине  ставится в соответствие пиксель в квадратной матрице размером (N+1)×(N+l). Цвет пикселя меняется от черного к белому при изменении сопротивления от минимального в сетке к максимальному в сетке. Результат измерения сетки сопротивлений, изображенной на Фиг. 5, визуализирован на Фиг. 7. Результат корректного измерения, соответствующий аттестованным значениям резисторов, показан на Фиг. 6. Максимальное отклонение измеренного сопротивления от номинального значения не превысило 10,4 Ом (3,4%), это отклонение связано с систематическими ошибками нановольтметра. Далее была проверена чувствительность предложенной схемы к малым изменениям сопротивления. Чувствительность к малым изменениям сопротивления является необходимой для измерения фотосопротивления R(P)-R0, то есть той части сопротивления, которая вызвана излучением. Для проверки чувствительности некоторые резисторы в схеме были заменены на подстроенные резисторы с переменным номиналом. Сопротивление второго по счету резистору на второй строке было уменьшено на 8,7 Ом по сравнению с базовым значением (- 2,9%), и для указанной измененной схемы снова было проведено измерение по описанному выше алгоритму. Изображение, соответствующее результату измерения, приведено на Фиг. 9. Корректное изображение, соответствующее истинным сопротивлениям матрицы, приведено на Фиг. 8. Максимальное отклонение измеренного сопротивления от истинного не превысило 1,25 Ом. На последнем шаге тестирования сопротивление второго резистора на второй строке было возвращено в исходное состояние, а сопротивление второго резистора на первой строке было увеличено на 8,7 Ом (- 2,9%). Изображение, соответствующее результату измерения, приведено на Фиг. 11. Корректное изображение, соответствующее истинным сопротивлениям матрицы, приведено на Фиг. 10. Максимальное отклонение измеренного сопротивления от истинного не превысило 1,78 Ом. Таким образом, проведенные эксперименты доказывают реализуемость метода восстановления всех сопротивлений, составляющих прямоугольную матрицу, по измерениям электрических потенциалов лишь на периметре схемы (при различных положениях источника тока). Это, в свою очередь, доказывает реализуемость полностью планарного матричного фотодетектора на основе фоторезистивных датчиков.
ставится в соответствие пиксель в квадратной матрице размером (N+1)×(N+l). Цвет пикселя меняется от черного к белому при изменении сопротивления от минимального в сетке к максимальному в сетке. Результат измерения сетки сопротивлений, изображенной на Фиг. 5, визуализирован на Фиг. 7. Результат корректного измерения, соответствующий аттестованным значениям резисторов, показан на Фиг. 6. Максимальное отклонение измеренного сопротивления от номинального значения не превысило 10,4 Ом (3,4%), это отклонение связано с систематическими ошибками нановольтметра. Далее была проверена чувствительность предложенной схемы к малым изменениям сопротивления. Чувствительность к малым изменениям сопротивления является необходимой для измерения фотосопротивления R(P)-R0, то есть той части сопротивления, которая вызвана излучением. Для проверки чувствительности некоторые резисторы в схеме были заменены на подстроенные резисторы с переменным номиналом. Сопротивление второго по счету резистору на второй строке было уменьшено на 8,7 Ом по сравнению с базовым значением (- 2,9%), и для указанной измененной схемы снова было проведено измерение по описанному выше алгоритму. Изображение, соответствующее результату измерения, приведено на Фиг. 9. Корректное изображение, соответствующее истинным сопротивлениям матрицы, приведено на Фиг. 8. Максимальное отклонение измеренного сопротивления от истинного не превысило 1,25 Ом. На последнем шаге тестирования сопротивление второго резистора на второй строке было возвращено в исходное состояние, а сопротивление второго резистора на первой строке было увеличено на 8,7 Ом (- 2,9%). Изображение, соответствующее результату измерения, приведено на Фиг. 11. Корректное изображение, соответствующее истинным сопротивлениям матрицы, приведено на Фиг. 10. Максимальное отклонение измеренного сопротивления от истинного не превысило 1,78 Ом. Таким образом, проведенные эксперименты доказывают реализуемость метода восстановления всех сопротивлений, составляющих прямоугольную матрицу, по измерениям электрических потенциалов лишь на периметре схемы (при различных положениях источника тока). Это, в свою очередь, доказывает реализуемость полностью планарного матричного фотодетектора на основе фоторезистивных датчиков.
Описанные выше алгоритмы восстановления сопротивлений и построения изображений для матрицы с прямоугольным типом элементарной ячейки остаются в силе и для матриц с треугольной или гексагональной типами элементарной ячейки, за исключением очевидной модификации уравнений Кирхгофа для решения прямой задачи расчета потенциала (в случае треугольной и гексагональной ячеек в каждом внутреннем узле сходится соответственно по шесть токов и по три тока, а не по четыре, как это было в случае прямоугольной ячейки). Даже требование периодичности сетки сопротивлений не является обязательным. Для однозначного восстановления всех сопротивлений фоторезистивных датчиков в матрице необходимо лишь, чтобы массив датчиков не содержал в себе приводимых блоков. Под приводимыми блоками, как уже отмечалось выше, подразумеваются группы находящихся рядом датчиков, которые можно заменить одним эквивалентным сопротивлением без изменения токов и потенциалов на периметре схемы. Простейшим примером приводимого блока является два последовательно соединенных болометрических датчика. Для такого блока описанный алгоритм позволит восстановить лишь сумму сопротивлений (и сумму фотосопротивлений), но не сопротивление каждого датчика в отдельности. При отсутствии приводимых блоков задача определения сопротивлений всех датчиков по измерениям на периметре решается однозначно.
Также в заявленном матричном детекторе возможно использование и любых базовых датчиков, реагирующих на локальную интенсивность света. Главным свойством светочувствительного датчика является изменение электрического сопротивления при освещении. Причиной изменения сопротивления может являться световой нагрев, тогда используемый датчик относится к классу болометров. Причиной изменения сопротивления может быть и межзонная генерация электрон - дырочных пар в полупроводнике, что позволяет использовать в качестве датчиков так называемые фотопроводники. Возможно использование датчиков на любых других физических принципах, приводящих к изменению сопротивления при освещении.
Изложенное позволяет сделать вывод о том, что выявленная проблема - реализация полностью планарного матричного фотодетектора, в котором все элементы расположены в одном слое интегральной микросхемы и не требуют технически сложной операции совмещения и коммутации матрицы фоторезистивных датчиков и интегральной схемы считывания, - решена, а заявленный технический результат - повышение технологичности конструкции матричного фотодетектора - достигнут.
Изобретение относится к области полупроводниковых фотоприемников и касается матричного фотодетектора. Матричный фотодетектор содержит функционально связанные размещенную на подложке матрицу фоторезистивных датчиков с управляемыми контактами, набор шин, включающий подключенную к заземленному источнику постоянного тока шину подвода электрического тока и подключенную к средству измерения и обработки шину выходного потенциала, мультиплексор, обеспечивающий подключение управляемых контактов к разным шинам, и управляющий контроллер, задающий последовательность подключения управляемых контактов к разным шинам. Фоторезистивные датчики в составе матрицы электрически соединены друг с другом с образованием структуры из неприводимых блоков. Набор шин дополнительно содержит подключенную к средству измерения и обработки шину заземления. Управляемыми контактами оснащены периферийные соединения фоторезистивных датчиков с соблюдением условия:  , где s - количество фоторезистивных датчиков в составе матрицы, с - количество периферийных соединений фоторезистивных датчиков, оснащенных управляемыми контактами. Технический результат заключается в повышении технологичности конструкции за счет реализации полностью планарного матричного фотодетектора. 5 з.п. ф-лы, 11 ил.
, где s - количество фоторезистивных датчиков в составе матрицы, с - количество периферийных соединений фоторезистивных датчиков, оснащенных управляемыми контактами. Технический результат заключается в повышении технологичности конструкции за счет реализации полностью планарного матричного фотодетектора. 5 з.п. ф-лы, 11 ил.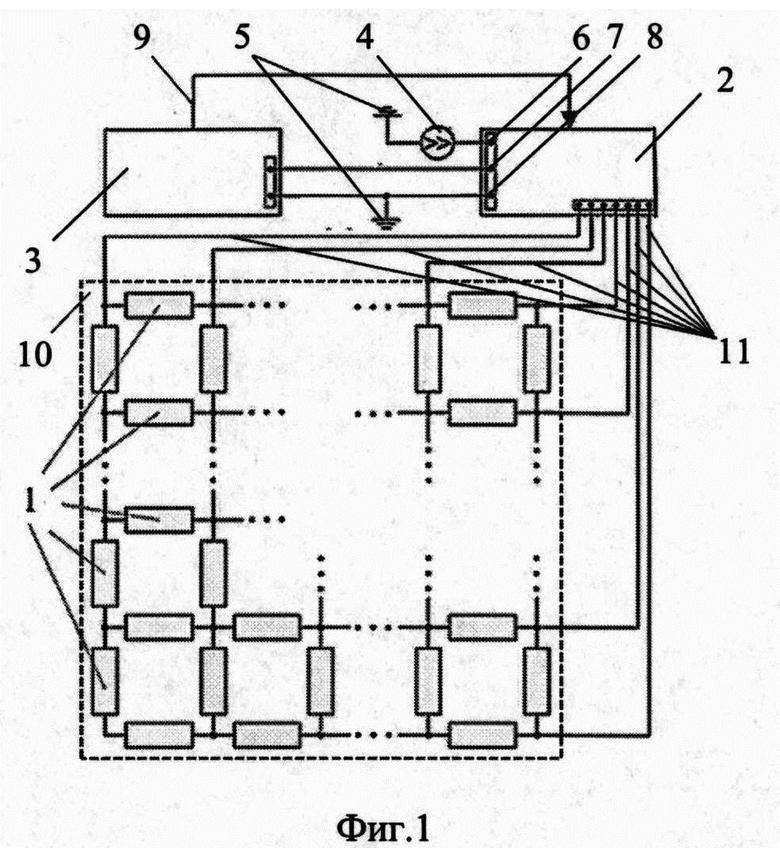
1. Матричный фотодетектор, содержащий функционально связанные размещенную на подложке матрицу фоторезистивных датчиков с управляемыми контактами, набор шин, включающий подключенную к заземленному источнику постоянного тока шину подвода электрического тока и подключенную к средству измерения и обработки шину выходного потенциала, мультиплексор, обеспечивающий подключение управляемых контактов к разным шинам, и управляющий контроллер, задающий последовательность подключения управляемых контактов к разным шинам, отличающийся тем, что фоторезистивные датчики в составе матрицы электрически соединены друг с другом с образованием структуры из неприводимых блоков, набор шин дополнительно содержит подключенную к средству измерения и обработки шину заземления, а управляемыми контактами оснащены периферийные соединения фоторезистивных датчиков с соблюдением условия:
 ,
,
s - количество фоторезистивных датчиков в составе матрицы;
с - количество периферийных соединений фоторезистивных датчиков, оснащенных управляемыми контактами.
2. Матричный фотодетектор по п. 1, отличающийся тем, что фоторезистивные датчики в составе матрицы электрически соединены друг с другом с образованием периодической структуры с прямоугольной элементарной ячейкой.
3. Матричный фотодетектор по п. 1, отличающийся тем, что фоторезистивные датчики в составе матрицы электрически соединены друг с другом с образованием периодической структуры с треугольной элементарной ячейкой.
4. Матричный фотодетектор по п. 1, отличающийся тем, что фоторезистивные датчики в составе матрицы электрически соединены друг с другом с образованием периодической структуры с гексагональной элементарной ячейкой.
5. Матричный фотодетектор по п. 1, отличающийся тем, что в качестве фоторезистивных датчиков использованы болометры.
6. Матричный фотодетектор по п. 1, отличающийся тем, что в качестве фоторезистивных датчиков использованы фотопроводники.
| JP 4876304 B2, 15.02.2012 | |||
| US 8513709 B2, 20.08.2013 | |||
| KR 1020130134657 A, 10.12.2013 | |||
| Устройство для односистемной защиты | 1957 |
|
SU122800A1 |

