Техническая область
Изобретение относится к области интеллектуальной интеграции оборудования сталелитейной промышленности, в частности к интеллектуальной интегрированной системе управления диспетчеризацией кронблоков.
Основная технология
С развитием мировой экономики сталелитейной промышленности спрос на стальные плиты увеличивается с каждым годом. В настоящее время оборудование для транспортировки плит в цехе заводского здания сталелитейного завода, в основном, использует режим работы обычного кронблока, при этом существующий режим работы обычного кронблока в основном зависит от ручной работы и объективных неблагоприятных условий, таких как высокая температура, высокая запыленность и тому подобное. Поэтому обычно существует ряд проблем, таких как высокая трудоемкость работы, легкость неправильной эксплуатации, низкая эффективность оборудования, низкая безопасность и тому подобное. При этом эксплуатация кронблока, эксплуатация и данные материалов для плит не подлежат своевременному и эффективному управлению, а степень автоматизации и информатизации низкая.
Наряду с продвижением и развитием отечественного интеллектуального производства, тенденция беспилотного, интеллектуального и информационного производства в компаниях становится все более очевидной. Реализация автоматической загрузки и разгрузки погрузочно-разгрузочного оборудования и автоматического отслеживания информации о материалах может значительно сократить количество рабочих на площадке, повысить эффективность работы и снизить затраты предприятий. Более того, внедрение беспилотного и интеллектуального погрузочно-разгрузочного оборудования может обеспечить более широкое распространение информации, помочь заказчикам повысить конкурентоспособность продукции и улучшить имидж предприятия, что имеет большое значение для цифровой трансформации предприятий.
31 мая 2019 года в Патентном ведомстве Китая (публикация №: CN109823968A) раскрыта разновидность системы управления резервуаром мостового крана, при этом система, предложенная в патенте, применяется для управления материалами и кронблоками на складе и включает модуль материалов, модуль кронблока, модуль зоны хранения и заземленное полотно. Модуль зоны хранения содержит этикетку, расположенную на материале, модуль кронблока содержит первое считывающее устройство, расположенное на кронблоке, устройство позиционирования кронблока, навигационное устройство кронблока и блок связи с кронблоком для управления работой кронблока. Модуль складской зоны содержит второй считыватель и устройство связи, которые расположены на складе хранения материалов. Наземное заземленное полотно содержит модуль управления правами, модуль настройки системы, модуль работы кронблока и модуль управления отчетами. Благодаря технической схеме, предусмотренной патентом, пользователи могут осуществлять всестороннее управление материалами на складе и работой кронблока, что повышает эффективность работы и производительность предприятия. Однако ключевые моменты схемы активно относятся к самому кронблоку, при этом взаимодействие кронблока и системных модулей других слоев также очень важно в реальной работе кронблока. Всестороннее и эффективное сотрудничество более выгодно для интеллектуального производства предприятий и способствует цифровой трансформации предприятий. Поэтому очень важно изучить интеллектуальную диспетчерскую интегрированную систему управления, основанную на кронблоке, чтобы понять, как реализовать автоматическую обработку, управление данными, мониторинг процессов и системную интеграцию материалов стальных плит.
Краткая информация об изобретении
Чтобы решить проблему, заключающуюся в том, что, когда нынешняя сталелитейная промышленность сталкивается с управлением хранением материалов, исследования сосредоточены на самом кронблоке непосредственного оператора, а другие операционные слои, кроме кронблока, игнорируются. При этом интеллектуальный уровень интеграции производства предприятия является низким, изобретение обеспечивает интеллектуальную интегрированную систему диспетчерского управления кронблоками, которая реализует автоматическую обработку и управление данными, мониторинг процесса и системную интеграцию материалов стальных плит, а также и способствует интеллектуальному развитию производства предприятия.
Для достижения вышеуказанных технических результатов техническая схема изобретения выглядит следующим образом:
Изобретение обеспечивает интеллектуальную интегрированную систему управления диспетчеризацией кронблоков для обработки и диспетчерского управления материалами плит и включает следующие системы:
систему управления информатизацией производства MES, модуль диспетчерского управления, интеллектуальный вспомогательный модуль и модуль кронблока;
система информатизации производства MES отправляет указания по производственному заданию в модуль управления диспетчеризацией, что интеллектуальный вспомогательный модуль возвращает вспомогательную информацию, используемую для логического решения по диспетчеризации производства при транспортировке материала для производства плит в модуль управления диспетчеризацией, модуль управления диспетчеризацией на основании указаний по производственному заданию и вспомогательной информации формирует инструкцию на выполнение диспетчеризации производства кронблока и отправляет ее в модуль кронблока, модуль кронблока получает и выполняет команду для диспетчерского управления производством кронблока, изданную модулем управления диспетчеризацией для завершения задачи автоматической обработки материалов плит, а затем передает результат выполнения инструкции модулю диспетчерского управления, при этом модуль получает результат выполнения, возвращенный модулем кронблока, для корректировки выполнения диспетчеризации производства кронблока.
Предпочтительно, что указания по производственному заданию, выдаваемые системой управления информатизацией производства MES, представляют собой ежедневный план работы участка склада плит, а модуль диспетчерского управления подразделяет полученный суточный план работы склада плит для формирования расписания задач;
что интеллектуальный вспомогательный модуль передает вспомогательную информацию, используемую для логического определения производственной диспетчеризации при обработке плит, в модуль управления диспетчеризацией, при этом вспомогательная информация содержит следующие компоненты: информацию о данных плит и информацию о безопасности на площадке в зоне хранения плит, при этом данные плит содержат следующую информацию: информацию идентификатора плиты, информацию о размере плиты и информацию о физических координатах плиты;
модуль управления диспетчеризацией формирует команду выполнения диспетчеризации производства кронблоков на основе расписания задач, информации об идентификаторе плиты, информации о размере плиты, информации о физических координатах плиты и информации о безопасности зоны хранения плиты;
модуль управления диспетчеризацией получает результат выполнения, переданный модулем кронблока, а когда информация о данных плиты изменяется, модуль управления диспетчеризацией обновляет вспомогательную информацию, переданную интеллектуальным вспомогательным модулем, при этом корректируя команду выполнения диспетчеризации производства кронблока в соответствии с технологией производственного задания и обновленной вспомогательной информацией, а также посредством объединения фактического состояния зоны хранения плит.
Предпочтительно, что модуль крон-блока содержит блок связи крон-блока, корпус крон-блока, блок позиционирования с защитой от вибрации, блок перемещения крон-блока, блок определения состояния зажима и блок обнаружения зажатия материала зажима;
один конец блока связи кронблока соответственно соединен с корпусом кронблока, блоком позиционирования против вибрации, блоком перемещения кронблока, блоком определения состояния зажима и блоком обнаружения зажатия материала зажима, другой конец блока связи кронблока находится в двунаправленной связи с модулем диспетчерского управления, блок связи с крон-блоком получает указания по выполнению диспетчеризации производства крон-блока, издаваемые модулем управления диспетчеризацией, а указания по выполнению диспетчеризации производства крон-блока содержат инструкцию по регулировке скорости, инструкцию по позиционированию с защитой от вибрации, инструкцию по автоматическому перемещению, инструкцию по обнаружению состояния зажима и зажатия материала зажима, инструкцию по обнаружению, затем эта инструкция передается в корпус кронблока, блок позиционирования против вибрации, блок определения состояния зажима, блок обнаружения зажатия материала зажима и блок перемещения кронблока для выполнения, наконец, результаты выполнения корпуса кронблока, блок позиционирования с защитой от вибрации, блок определения состояния зажима, блок обнаружения зажатия материала зажима и блок перемещения крон-блока передаются обратно в модуль управления диспетчеризацией через блок связи крон-блока;
блок связи кронблока управляет автоматической работой корпуса кронблока в соответствии с инструкцией по регулировке скорости, а также предотвращаются столкновения и выполняется автоматическое замедление нескольких кронблоков; подвижный блок кронблока совершает перемещение кронблока к целевым координатам в соответствии с целевыми координатами, указанными в инструкции по автоматическому перемещению, и передает обратно навигационные данные в реальном времени в модуль управления диспетчеризацией через блок связи кронблока; блок позиционирования с защитой от вибрации получает команду позиционирования с защитой от вибрации, позиционирует положение корпуса кронблока, управляет кронблоком для выполнения действий по перемещению и подъему в соответствии с положением корпуса кронблока и сигналами положения подъема, а также загружает реальные данные - данные временного противовибрационного позиционирования в модуль диспетчерского управления через блок связи кронблока; блок обнаружения состояния фиксации получает команду обнаружения состояния фиксации, определяет, открыто или закрыто состояние фиксации крон-блока, затем загружает обнаруженные данные в реальном времени в модуль управления диспетчеризацией через блок связи крон-блока; блок обнаружения зажатия материала зажима получает команду обнаружения зажатия материала зажима, определяет результат того, что зажим кронблока зажимает материалы плиты, достигает цели зажатия, перемещения и укладки материала плиты и загружает обнаруженные данные в режиме реального времени в модуль диспетчерского управления через блок связи кронблока.
Предпочтительно, что модель управления позиционированием с защитой от вибрации, преобразователь частоты и двигатель расположены в блоке позиционирования с защитой от вибрации, а модель управления позиционированием с защитой от вибрации содержит следующее: контроллер, модуль объекта управления и модуль обнаружения положения объекта управления, при этом целевое положение Lt используется в качестве входа регулятора скорости, регулятор скорости соединен с модулем объекта управления, выход модуля объекта управления используется как вход модуля положения объекта управления обнаружением, позиция Lc текущего объекта управления возвращается в целевое положение Lt, модель управления позиционированием с защитой от вибрации представляет собой модель управления закрытого цикла, а объект управления в модуле объекта управления является тележкой или ручной тележкой корпуса кронблока, пусть Lwindow представляет собой пороговое значение критериев управления, Lmin представляет заданное расстояние замедления, Vmin представляет минимальную заданную скорость, Vmax представляет максимальную заданную скорость, а ΔL представляет значение разницы объекта управления от целевого положения и выполняет следующие действия после того, как блок позиционирования с защитой от вибрации получает указание о позиционировании с защитой от вибрации:
S1. суждение относительно того, удовлетворяет ли значение разницы объекта управления относительно целевой позиции ΔL следующему: Lwindow<ΔL≤Lmin, если да, расчет текущей скорости v объекта управления, где формула следующая:
 ,
,
затем выполняется этап S2; в противном случае, оценивается, суждение относительно того, удовлетворяет ли значение разницы объекта управления относительно целевой позиции ΔL следующему: ΔL>Lmin, при положительном ответе текущая скорость v объекта управления получается Vmax, в противном случае текущая скорость v объекта управления принимается равной нулю, и выполняется этап S3;
S2. оценивается, соответствует ли текущая скорость v объекта управления следующим условиям: v≤Vmin, если да, то определяется текущая скорость v объекта управления Vmin и выполняется этап S3; в противном случае выполняется этап S3;
S3. конвертация текущей скорости v в заданное значение с помощью преобразователя частоты для предотвращения вибрации и управление двигателем для преобразования скорости после запуска преобразователя частоты на начальном этапе посредством наклона преобразователя частоты; если преобразователь частоты не запускается, преобразование скорости осуществляется напрямую путем управления двигателем;
при этом блок кронблока перемещает кронблок к целевым координатам посредством действий двигателя на основе модели управления позиционированием с защитой от вибрации, преобразователя частоты и двигателя, расположенных в блоке позиционирования с защитой от вибрации, в соответствии с целевыми координатами, заданными в автоматическом режиме обучения перемещению.
Здесь этап S1-S2 используется для получения целевого значения скорости, которое контролируется объектом управления, при этом скорость и заданное значение преобразователя частоты имеют соответствующие соотношения преобразования, при этом соответствующие соотношения разных преобразователей частоты различны. Посредством действия этапа S3 преобразователь частоты дополнительно управляется напрямую для преобразования скорости объекта управления в скорость управления.
Предпочтительно, что блок определения состояния зажима получает команду определения состояния зажима, а блок обнаружения зажатия материала зажима получает команду обнаружения зажима материала зажима, когда зажим опускается, срабатывает сенсорный переключатель материала, сигнал настройки «1» указывает на то, что материал плиты находится в стабильном контакте с зажимом, а сигнал настройки «0» указывает на то, что материал плиты не находится в стабильном контакте с зажимом;
после того, как зажим оказывается в устойчивом контакте с материалом плиты, зажим безопасно поднимается, когда время достижения заданной высоты превышает ts секунд, если сигнал равен «0», блок обнаружения состояния зажима подаст оповещение, и зажим не поднимется;
Когда зажим открыт, сигнал переключателя открытия и закрытия зажима равен «1», а когда зажим закрыт, сигнал переключателя открытия и закрытия зажима равен «0», если сигнал переключателя материала касания устройства срабатывания равен «1», а сигнал переключателя открытия и закрытия зажима равен «1», это указывает на то, что материал надежно зажат. В зависимости от того, движется ли корпус кронблока или нет, перемещение материала подтверждается или не подтверждается; если сигнал переключателя материала касания устройства срабатывания равен «0», а сигнал переключателя открытия и закрытия зажима равен «0», это указывает на то, что материал уложен.
Предпочтительно, что интеллектуальный вспомогательный модуль содержит блок сбора данных, блок обнаружения плиты, блок беспроводной связи и блок безопасности на площадке; блок сбора данных отвечает за взаимодействие данных модуля кронблока, модуля диспетчерского управления и интеллектуального вспомогательного модуля; блок обнаружения плиты содержит блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты, которые соответственно используются для распознавания идентификатора плиты, измерения размера плиты и определения физических координат плиты для реализации операций по поступлению на склад и складированию, вывода данных отслеживания выбытия плиты; блок беспроводной связи предназначен для управления беспроводным взаимодействием модуля кронблока, модуля диспетчерского управления и интеллектуального вспомогательного модуля; блок безопасности на площадке используется для реагирования на механизм безопасности зоны хранения плит.
Предпочтительно, блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты блока обнаружения плыты находятся в высокотемпературной среде, при этом блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты соответственно используются для распознавания идентификатора плиты, измерение размера плиты и определение физических координат плиты; в рабочем цикле используется промышленная камера и оборудование лазерного сканирования, при этом на промышленной камере дополнительно установлено взрывозащищенное устройство с водяным охлаждением, обеспечивающее снижение температуры за счет режима водяного охлаждения, и устройство воздушного охлаждения, которое также дополнительно расположено на периферии оборудования лазерного сканирования, так что температуру можно снизить за счет режима воздушного охлаждения;
после того, как информация о плите собрана блоком распознавания идентификатора плит, блоком измерения размера плит и блоком сканирования плит блока обнаружения плит, фильтрация данных с помощью метода фильтрации, удаление точек за пределами выбранной границы и аномальных точек, а также выполнение извлечения признаков, распознавания идентификаторов, измерения размеров и сканирования на основе машинного распознавания и алгоритма глубокого обучения.
Предпочтительно, что блок распознавания идентификатора плиты снабжен первым коллектором, а первый коллектор включает в себя переключатель обнаружения плит, промышленную камеру, источник света и контроллер, когда материал плиты поступает в интеллектуальную интегрированную систему управления диспетчеризацией кронблоков через роликовый путь, срабатывает переключатель обнаружения плит и запускается функция распознавания блока распознавания идентификатора плит, после чего распознавание символов OCR будет реализовано на основе алгоритма глубокого обучения и сбора информации, данные, передаваемые в модуль управления диспетчеризацией блоком распознавания идентификатора плит, включают в себя следующее: отметку системного времени, идентификационный номер плиты; при этом один блок распознавания идентификаторов плит расположен на входе и выходе из зоны хранения плит, после получения модулем управления диспетчеризацией идентификационного номера плиты, сопоставление идентификационного номера плиты с указаниями производственного задания, изданными системой управления производственной информатизацией MES, а также если идентификационный номер плиты существует в инструкции производственного задания, изданной системой управления производственной информатизацией MES, план будет сопоставлен, в противном случае идентификационный номер плиты используется в качестве нового дополнения, а модуль управления диспетчеризацией отправит вновь добавленный план в MES как фактическую производительность для обработки, тем самым реализуя замкнутый цикл данных отслеживания плит.
Предпочтительно, что блок распознавания идентификатора плиты снабжен вторым коллектором, а второй коллектор включает в себя промышленную камеру, источник света и контроллер, блок измерения размеров плиты реализует измерение физических размеров длины, ширины и высоты плиты на основе метода расчета поля зрения, при этом данные о результатах измерения размеров передаются обратно в модуль диспетчерского управления, в том числе следующие данные: метка системного времени, максимальная длина плиты, минимальная длина плиты, максимальная ширина плиты, минимальная ширина плиты, максимальная толщина плиты и минимальная толщина плиты, один блок измерения размера плиты расположен на входе и выходе из зоны хранения плит для реализации замкнутого цикла данных отслеживания плит.
Предпочтительно, что третий коллектор расположен на блоке сканирования плит, а третий коллектор представляет собой лазерный сканер, на основе данных облака точек выполнение извлечения элементов плиты с помощью третьего коллектора, фильтрация данных после получения сканированных данных облака точек, удаление точек за пределами выбранной границы и аномальных точек, окончательное объединение для создания файла PCD, определение физических координат плиты и идентификация подачи, а также данные результата возвращаются в модуль управления диспетчеризацией, включая следующее: системную отметку времени, длину плиты, ширину плиты и координаты центра плиты.
Предпочтительно, что блок безопасности на площадке содержит датчик контроля доступа и карту получения изображения, карта получения изображения и датчик контроля доступа расположены во множестве положений на автоматизированной площадке цеха по производству слябов, когда карта получения изображения или датчик контроля доступа обнаруживают, что рабочий входит в цех, модуль диспетчерского управления запускает механизм безопасности, а блок безопасности на площадке реагирует на механизм безопасности, после чего подается оповещение о рабочем в цеху, в этом случае цех отправляется в модуль управления диспетчеризацией, а модуль управления диспетчеризацией запускает рабочий механизм в соответствии с полученным сигналом, при этом рабочий механизм имеет общий уровень и важный уровень; когда рабочий механизм находится на общем уровне, модуль диспетчерского управления подает звуковую и визуальную сигнализацию и предоставляет подсказки пользовательского интерфейса; когда рабочий механизм находится на важном уровне, интеллектуальная интегрированная система управления диспетчеризацией кронблоков останавливается до тех пор, пока нарушение безопасности, вызванное приходом рабочего, не будет устранено.
Изобретение имеет следующие полезные результаты:
Изобретение обеспечивает интеллектуальную интегрированную систему управления диспетчеризацией кронблоков, которая объединяет модуль кронблока, модуль диспетчерского управления и интеллектуальный вспомогательный модуль, при этом модуль кронблока реализует автоматическую обработку плит и интегрирован с модулем диспетчерского управления. Система диспетчерского управления кронблоками обеспечивает совместную работу нескольких машин с кронблоком, безопасное предотвращение инцидентов и реализацию автоматического процесса работы, а интеллектуальный вспомогательный модуль помогает модулю диспетчерского управления реализовать взаимосвязь данных и отслеживание материалов, а также взаимодействовать с модулем кронблока и диспетчерским управлением, модулем для реализации автоматической работы склада плит и содействия интеллектуальному развитию производства предприятия.
Прилагаемые чертежи
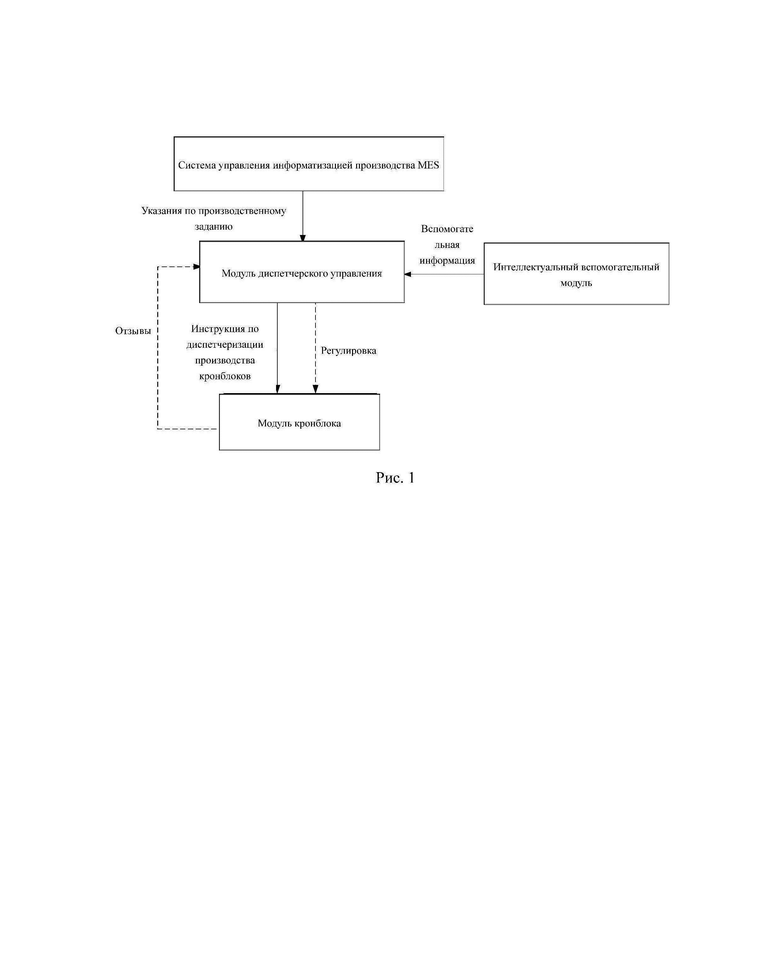
На рис. 1 представлена схематическая диаграмма, показывающая общую структуру интеллектуальной интегрированной системы управления диспетчеризацией кронблоков согласно варианту исполнения настоящего изобретения;
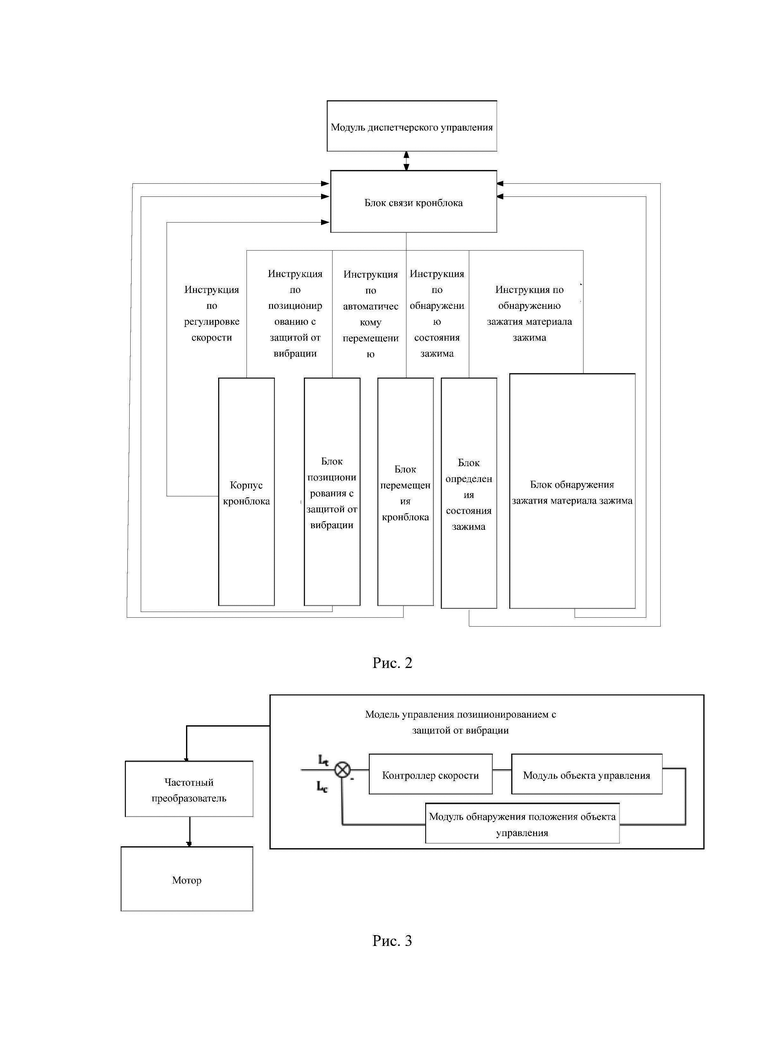
На рис. 2 представлена схематическая диаграмма общей конструкции модуля кронблока согласно варианту исполнения настоящего изобретения;
На рис. 3 представлена структурная схема блока позиционирования с защитой от вибрации согласно варианту исполнения настоящего изобретения.
Подробный режим применения
Прилагаемые чертежи предназначены только для иллюстрации и не должны толковаться как ограничивающие настоящий патент;
Для лучшей иллюстрации настоящего варианта исполнения некоторые части прилагаемых чертежей могут быть пропущены, увеличены или уменьшены и не отражать фактические размеры;
Специалистам в данной области техники будет вполне понятно, что некоторые хорошо известные описания в прилагаемых чертежах могут быть пропущены.
Позиционное соотношение, изображенное на прилагаемых чертежах, предназначено только для справки и не должно использоваться как ограничение настоящего патента;
Техническая схема изобретения дополнительно описана ниже со ссылкой на прилагаемые чертежи и варианты исполнения.
Вариант исполнение
Интеллектуальная интегрированная система управления диспетчеризацией кронблоков для управления погрузкой и отправкой материалов плит, ориентированная на сталелитейную промышленность (как показано на рис. 1), состоит из следующих 4 подразделов:
систему управления информатизацией производства MES, модуль диспетчерского управления, интеллектуальный вспомогательный модуль и модуль кронблока;
Система управления информатизацией производства MES представляет собой комплекс систем управления информатизацией производства, ориентированный на цеховой уровень производственного предприятия. MES может обеспечивать для предприятий модули управления, такие как управление производственными данными, управление планированием и диспетчеризацией, диспетчерское управление производством, управление запасами, управление качеством, управление человеческими ресурсами, управление рабочим центром/оборудованием, управление приспособлениями для инструментов, управление закупками, управление затратами, управление проектом «Канбан», контроль производственного процесса, анализ базовой интеграции данных, разложение интеграции данных верхнего уровня и т. д., а также создавать прочную, надежную, комплексную и осуществимую платформу совместного управления промышленнымпроизводством для предприятий.
В данном варианте, как показано на рис. 1, на общем уровне взаимодействие системы управления информатизацией производства MES, модули диспетчерского управления, интеллектуального вспомогательного модуля и модули кронблока выглядят следующим образом:
Система информатизации производства MES отправляет указания по производственному заданию в модуль управления диспетчеризацией, а интеллектуальный вспомогательный модуль возвращает вспомогательную информацию, используемую для логического решения по диспетчеризации производства при транспортировке материала для производства плит в модуль управления диспетчеризацией, модуль управления диспетчеризацией на основании указаний по производственному заданию и вспомогательной информации формирует инструкцию на выполнение диспетчеризации производства кронблока и отправляет ее в модуль кронблока, модуль кронблока получает и выполняет команду для диспетчерского управления производством кронблока, изданную модулем управления диспетчеризацией для завершения задачи автоматической обработки материалов плит, а затем передает результат выполнения инструкции модулю диспетчерского управления, при этом модуль получает результат выполнения, возвращенный модулем кронблока, для корректировки выполнения диспетчеризации производства кронблока.
В данном варианте, указания по производственному заданию, выдаваемые системой управления информатизацией производства MES, представляют собой ежедневный план работы участка склада плит, а модуль диспетчерского управления подразделяет полученный суточный план работы склада плит для формирования расписания задач;
Интеллектуальный вспомогательный модуль передает вспомогательную информацию, используемую для логического определения производственной диспетчеризации при обработке плит, в модуль управления диспетчеризацией, при этом вспомогательная информация содержит следующие компоненты: информацию о данных плит и информацию о безопасности на площадке в зоне хранения плит, при этом данные плит содержат следующую информацию: информацию идентификатора плиты, информацию о размере плиты и информацию о физических координатах плиты;
модуль управления диспетчеризацией формирует команду выполнения диспетчеризации производства кронблоков на основе расписания задач, информации об идентификаторе плиты, информации о размере плиты, информации о физических координатах плиты и информации о безопасности зоны хранения плиты;
В данном варианте, исполнения модуль диспетчерского управления подразделяет полученный ежедневный план работы зоны хранения плит для формирования расписания задач, а содержание конкретной инструкции по диспетчерскому управлению производством кронблоков, соответствующей расписанию задач, может быть следующим:
План задач, полученный модулем диспетчерского управления, устанавливается как T, последовательность обработки блоков и информация о целевом узле блока определяются в плане задач T, а модуль диспетчерского управления определяет блок выполнения плана задач T в соответствии с производственным процессом, инструкцией по выполнению задач и вспомогательной информацией. Например, два кронблока для выполнения плана задач T определяются как Ma и Mb, план задач T делится на основе количества n плит, содержащихся в плане задач T, затем получают график задач плана выполнения для обработки n плит, а затем определяют тип выполнения по расписанию задач плана выполнения в соответствии с условием совместной координации исполнительных кронблоков, например, определяются следующие три типа:
I. Кронблок Ma исполняет tk, кронблок Mb исполняет уклонение, а план выполнения tk k-й плиты выполняется самостоятельно.
II. Кронблок Ma выполняет tk, кронблок Mb выполняет уклонение, кронблок Mb исполняет tk-1, кронблок Ma выполняет уклонение, а план выполнения tk-1 k-1-й плиты выполняется параллельно с план выполнения tk й k-й плиты;
III. План выполнения tk k-й разделяется и исполняется: tk=tk1,tk2; Из них tk1 и tk2 соответственно представляют собой два плана после разделения плана исполнения tk. Поместите tk1 и tk2 в план задачи T и удалите исходный план выполнения tk, чтобы сформировать новый план задачи T'. Для плана исполнения в новом плане задач T' выберите тип выполнения: однократное выполнение или параллельное выполнение.
В соответствии с функцией стоимости времени работы кронблока для каждого типа исполнения определяется инструкция по диспетчерскому управлению операциями обработки плит кронблока, когда функция стоимости времени работы кронблока получает минимальное значение, а затем определяется блок пути обработки плит кронблока в соответствии с инструкцией по отправке операции обработки плиты кронблока модулем диспетчерского управления для отправки кронблока. При этом во всем процессе интеллектуальная система диспетчерского управления согласовывается совместно с интеллектуальным вспомогательным модулем, и интеллектуальные функции уровня диспетчеризации реализуются на основе по взаимосвязи данных, включая следующее: диспетчеризацию оборудования кронблока, совместную работу нескольких машин кронблока, предотвращение инцидентов безопасности кронблока, общий график задач и т. д.
Модуль управления диспетчеризацией получает результат выполнения, переданный модулем кронблока, а когда информация о данных плиты изменяется, модуль управления диспетчеризацией обновляет вспомогательную информацию, переданную интеллектуальным вспомогательным модулем, при этом корректируя команду выполнения диспетчеризации производства кронблока в соответствии с технологией производственного задания и обновленной вспомогательной информацией, а также посредством объединения фактического состояния зоны хранения плит.
В данном варианте, как показано на рис. 2, модуль крон-блока содержит блок связи крон-блока, корпус крон-блока, блок позиционирования с защитой от вибрации, блок перемещения крон-блока, блок определения состояния зажима и блок обнаружения зажатия материала зажима;
один конец блока связи кронблока соответственно соединен с корпусом кронблока, блоком позиционирования против вибрации, блоком перемещения кронблока, блоком определения состояния зажима и блоком обнаружения зажатия материала зажима, другой конец блока связи кронблока находится в двунаправленной связи с модулем диспетчерского управления, блок связи с крон-блоком получает указания по выполнению диспетчеризации производства крон-блока, издаваемые модулем управления диспетчеризацией, а указания по выполнению диспетчеризации производства крон-блока содержат инструкцию по регулировке скорости, инструкцию по позиционированию с защитой от вибрации, инструкцию по автоматическому перемещению, инструкцию по обнаружению состояния зажима и зажатия материала зажима, инструкцию по обнаружению, затем эта инструкция передается в корпус кронблока, блок позиционирования против вибрации, блок определения состояния зажима, блок обнаружения зажатия материала зажима и блок перемещения кронблока для выполнения, наконец, результаты выполнения корпуса кронблока, блок позиционирования с защитой от вибрации, блок определения состояния зажима, блок обнаружения зажатия материала зажима и блок перемещения крон-блока передаются обратно в модуль управления диспетчеризацией через блок связи крон-блока;
Конкретно:
Блок связи кронблока управляет автоматической работой корпуса кронблока в соответствии с инструкцией по регулировке скорости, а также предотвращаются столкновения и выполняется автоматическое замедление нескольких кронблоков;
Подвижный блок кронблока совершает перемещение кронблока к целевым координатам в соответствии с целевыми координатами, указанными в инструкции по автоматическому перемещению, и передает обратно навигационные данные в реальном времени в модуль управления диспетчеризацией через блок связи кронблока;
Блок позиционирования с защитой от вибрации получает команду позиционирования с защитой от вибрации, позиционирует положение корпуса кронблока, управляет кронблоком для выполнения действий по перемещению и подъему в соответствии с положением корпуса кронблока и сигналами положения подъема, а также загружает реальные данные - данные временного противовибрационного позиционирования в модуль диспетчерского управления через блок связи кронблока;
Блок обнаружения состояния фиксации получает команду обнаружения состояния фиксации, определяет, открыто или закрыто состояние фиксации крон-блока, затем загружает обнаруженные данные в реальном времени в модуль управления диспетчеризацией через блок связи крон-блока; блок обнаружения зажатия материала зажима получает команду обнаружения зажатия материала зажима, определяет результат того, что зажим кронблока зажимает материалы плиты, достигает цели зажатия, перемещения и укладки материала плиты и загружает обнаруженные данные в режиме реального времени в модуль диспетчерского управления через блок связи кронблока.
В данном варианте, как показано на рис. 3, модель управления позиционированием с защитой от вибрации, преобразователь частоты и двигатель расположены в блоке позиционирования с защитой от вибрации, а модель управления позиционированием с защитой от вибрации содержит следующее: контроллер, модуль объекта управления и модуль обнаружения положения объекта управления, при этом целевое положение Lt используется в качестве входа регулятора скорости, регулятор скорости соединен с модулем объекта управления, выход модуля объекта управления используется как вход модуля положения объекта управления обнаружением, позиция Lc текущего объекта управления возвращается в целевое положение Lt, модель управления позиционированием с защитой от вибрации представляет собой модель управления закрытого цикла, а объект управления в модуле объекта управления является тележкой или ручной тележкой корпуса кронблока, пусть Lwindow представляет собой пороговое значение критериев управления, Lmin представляет заданное расстояние замедления, Vmin представляет минимальную заданную скорость, Vmax представляет максимальную заданную скорость, а ΔL представляет значение разницы объекта управления от целевого положения и выполняет следующие действия после того, как блок позиционирования с защитой от вибрации получает указание о позиционировании с защитой от вибрации:
S1. суждение относительно того, удовлетворяет ли значение разницы объекта управления относительно целевой позиции ΔL следующему: Lwindow<ΔL≤Lmin (определение «слева» указывает, что значение отклонения объекта управления от целевого положения ΔL больше, чем пороговое значение критерия управления, модель управления позиционированием с защитой от вибрации будет выполнять управление с защитой от вибрации), если да, расчет текущей скорости v объекта управления, где формула следующая:
,
затем выполняется этап S2; в противном случае, оценивается, суждение относительно того, удовлетворяет ли значение разницы объекта управления относительно целевой позиции ΔL следующему: ΔL>Lmin, при положительном ответе текущая скорость v объекта управления получается Vmax, в противном случае текущая скорость v объекта управления принимается равной нулю, и выполняется этап S3;
S2. оценивается, соответствует ли текущая скорость v объекта управления следующим условиям: v≤Vmin, если да, то определяется текущая скорость v объекта управления Vmin и выполняется этап S3; в противном случае выполняется этап S3;
S3. конвертация текущей скорости v в заданное значение с помощью преобразователя частоты для предотвращения вибрации и управление двигателем для преобразования скорости после запуска преобразователя частоты на начальном этапе посредством наклона преобразователя частоты; если преобразователь частоты не запускается, преобразование скорости осуществляется напрямую путем управления двигателем. Скорость и заданное значение преобразователя частоты имеют соответствующие соотношения преобразования, при этом соответствующие соотношения разных преобразователей частоты различаются. Здесь это не повторяется.
Помимо этого, при этом блок кронблока перемещает кронблок к целевым координатам посредством действий двигателя на основе модели управления позиционированием с защитой от вибрации, преобразователя частоты и двигателя, расположенных в блоке позиционирования с защитой от вибрации, в соответствии с целевыми координатами, заданными в автоматическом режиме обучения перемещению.
В данном варианте, что блок определения состояния зажима получает команду определения состояния зажима, а блок обнаружения зажатия материала зажима получает команду обнаружения зажима материала зажима, когда зажим опускается, срабатывает сенсорный переключатель материала, сигнал настройки «1» указывает на то, что материал плиты находится в стабильном контакте с зажимом, а сигнал настройки «0» указывает на то, что материал плиты не находится в стабильном контакте с зажимом;
после того, как зажим оказывается в устойчивом контакте с материалом плиты, зажим безопасно поднимается, когда время достижения заданной высоты превышает ts секунд, если сигнал равен «0», блок обнаружения состояния зажима подаст оповещение, и зажим не поднимется; Продолжительность времени, в течение которого зажим поднимается на заданную высоту, устанавливается в соответствии с конкретными потребностями. В данном варианте исполнения можно установить значение 5 с.
Когда зажим открыт, сигнал переключателя открытия и закрытия зажима равен «1», а когда зажим закрыт, сигнал переключателя открытия и закрытия зажима равен «0», если сигнал переключателя материала касания устройства срабатывания равен «1», а сигнал переключателя открытия и закрытия зажима равен «1», это указывает на то, что материал надежно зажат. В зависимости от того, движется ли корпус кронблока или нет, перемещение материала подтверждается или не подтверждается; если сигнал переключателя материала касания устройства срабатывания равен «0», а сигнал переключателя открытия и закрытия зажима равен «0», это указывает на то, что материал уложен.
В данном варианте, интеллектуальный вспомогательный модуль содержит блок сбора данных, блок обнаружения плиты, блок беспроводной связи и блок безопасности на площадке; блок сбора данных отвечает за взаимодействие данных модуля кронблока, модуля диспетчерского управления и интеллектуального вспомогательного модуля; блок обнаружения плиты содержит блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты, которые соответственно используются для распознавания идентификатора плиты, измерения размера плиты и определения физических координат плиты для реализации операций по поступлению на склад и складированию, вывода данных отслеживания выбытия плиты; блок беспроводной связи предназначен для управления беспроводным взаимодействием модуля кронблока, модуля диспетчерского управления и интеллектуального вспомогательного модуля; блок безопасности на площадке используется для реагирования на механизм безопасности зоны хранения плит.
В данном варианте, исполнения база данных с открытым исходным кодом MYSQL Community 8 принимается в качестве системной DB базы данных блоком сбора данных. Комплекс соединений MYSQL создается с использованием промежуточного программного обеспечения Proxool. Интерфейсы RestFul WebService открыты для модуля кронблока, модуля диспетчерского управления и интеллектуального вспомогательного модуля; служба специализированных Servlet Java-программ разрабатывается с помощью Tomcat и JavaWeb, при этом служба специализированных Servlet Java-программ поддерживает любую кроссплатформенную систему. Если модулю кронблока, модулю диспетчерского управления и интеллектуальному вспомогательному модулю требуется режим интерфейса WebApi, система сбора данных разработает WebApi через .NetCore для вызова модуля кронблока, модуля диспетчерского управления и интеллектуального вспомогательного модуля. Учреждается промежуточная служба очереди сообщений для открытия связи модуля диспетчерского управления и блока сбора данных. Система управления базами данных класса с открытым исходным кодом Redis используется в качестве хранилища данных в реальном времени, а EMQ - в качестве служб подписки и мгновенной отправки push-сообщений. Служба кластеров EMQ создана для повышения стабильности и надежности механизма, а MongoDB используется в качестве хранилища определений журналов и сообщений.
В данном варианте, блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты блока обнаружения плыты находятся в высокотемпературной среде, при этом блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты соответственно используются для распознавания идентификатора плиты, измерение размера плиты и определение физических координат плиты; в рабочем цикле используется промышленная камера и оборудование лазерного сканирования, при этом на промышленной камере дополнительно установлено взрывозащищенное устройство с водяным охлаждением, обеспечивающее снижение температуры за счет режима водяного охлаждения, и устройство воздушного охлаждения, которое также дополнительно расположено на периферии оборудования лазерного сканирования, так что температуру можно снизить за счет режима воздушного охлаждения;
после того, как информация о плите собрана блоком распознавания идентификатора плит, блоком измерения размера плит и блоком сканирования плит блока обнаружения плит, фильтрация данных с помощью метода фильтрации, удаление точек за пределами выбранной границы и аномальных точек, а также выполнение извлечения признаков, распознавания идентификаторов, измерения размеров и сканирования на основе машинного распознавания и алгоритма глубокого обучения.
В данном варианте, что блок распознавания идентификатора плиты снабжен первым коллектором, а первый коллектор включает в себя переключатель обнаружения плит, промышленную камеру, источник света и контроллер, когда материал плиты поступает в интеллектуальную интегрированную систему управления диспетчеризацией кронблоков через роликовый путь, срабатывает переключатель обнаружения плит и запускается функция распознавания блока распознавания идентификатора плит, после чего распознавание символов OCR будет реализовано на основе алгоритма глубокого обучения и сбора информации, данные, передаваемые в модуль управления диспетчеризацией блоком распознавания идентификатора плит, включают в себя следующее: отметку системного времени, идентификационный номер плиты; при этом один блок распознавания идентификаторов плит расположен на входе и выходе из зоны хранения плит, после получения модулем управления диспетчеризацией идентификационного номера плиты, сопоставление идентификационного номера плиты с указаниями производственного задания, изданными системой управления производственной информатизацией MES, а также если идентификационный номер плиты существует в инструкции производственного задания, изданной системой управления производственной информатизацией MES, план будет сопоставлен, в противном случае идентификационный номер плиты используется в качестве нового дополнения, а модуль управления диспетчеризацией отправит вновь добавленный план в MES как фактическую производительность для обработки, тем самым реализуя замкнутый цикл данных отслеживания плит.
В данном варианте, исполнения блок измерения размеров плит был снабжен вторым коллектором, причем второй коллектор должен содержать промышленную камеру, источник света и контроллер. Единица измерения размеров плиты основана на методе расчета пространства обозрения, при этом формула расчета этого метода расчета поля зрения выглядит следующим образом: Пространство обозрения FOV (H или V) = рабочее расстояние (WD) × размер целевой поверхности (H или V)/фокусное расстояние f. В данном случае реализуется измерение физических размеров длины, ширины и высоты плиты, а данные о результате измерения размеров поступают обратно в модуль диспетчерского управления, в том числе следующие: метка системного времени, максимальная длина плиты, минимальная длина плиты, максимальная ширина плиты, минимальная ширина плиты, максимальная толщина плиты и минимальная толщина плиты, один блок измерения размера плиты расположен на входе и выходе из зоны хранения плит для реализации замкнутого цикла данных отслеживания плит.
В данном варианте, что третий коллектор расположен на блоке сканирования плит, а третий коллектор представляет собой лазерный сканер, на основе данных облака точек выполнение извлечения элементов плиты с помощью третьего коллектора, фильтрация данных после получения сканированных данных облака точек, удаление точек за пределами выбранной границы и аномальных точек, окончательное объединение для создания файла PCD, определение физических координат плиты и идентификация подачи, а также данные результата возвращаются в модуль управления диспетчеризацией, включая следующее: системную отметку времени, длину плиты, ширину плиты и координаты центра плиты. В частности, блок сканирования плиты дополняет данные (интерполяционное заполнение на основе данных окружающей решетки, если в ячейке нет точек) и сжатие (нормализацию множества точек в ячейке) в блоке данных решетки (построение сетки). Стереоскопические трехмерные данные затем преобразуются в пленарные данные, при этом значения оси z представляются контурными линиями. Метод снижает требования к расчетной силе при отображении, размывает неровную поверхность материала и позволяет удовлетворить критерии поиска границы плиты.
В данном варианте, что блок безопасности на площадке содержит датчик контроля доступа и карту получения изображения, карта получения изображения и датчик контроля доступа расположены во множестве положений на автоматизированной площадке цеха по производству слябов, когда карта получения изображения или датчик контроля доступа обнаруживают, что рабочий входит в цех, модуль диспетчерского управления запускает механизм безопасности, а блок безопасности на площадке реагирует на механизм безопасности, после чего подается оповещение о рабочем в цеху, в этом случае цех отправляется в модуль управления диспетчеризацией, а модуль управления диспетчеризацией запускает рабочий механизм в соответствии с полученным сигналом, при этом рабочий механизм имеет общий уровень и важный уровень; когда рабочий механизм находится на общем уровне, модуль диспетчерского управления подает звуковую и визуальную сигнализацию и предоставляет подсказки пользовательского интерфейса; когда рабочий механизм находится на важном уровне, интеллектуальная интегрированная система управления диспетчеризацией кронблоков останавливается до тех пор, пока нарушение безопасности, вызванное приходом рабочего, не будет устранено.
Позиционное соотношение, изображенное на прилагаемых чертежах, предназначено только для справки и не должно использоваться как ограничение настоящего патента.
Следует понимать, что приведенные выше варианты исполнения настоящего изобретения представлены только как иллюстрация и не предназначены для ограничения объема изобретения. Другие варианты или модификации различных форм приведенного выше описания очевидно будут поняты специалистами в данной области техники. Здесь это не является необходимым или исчерпывающим для всех вариантов исполнения. Любое изменение, эквивалентная замена, усовершенствование и т. д., которые соответствуют духу и принципам изобретения, должны быть защищены изложенной далее формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЪЕКТОВАЯ КОММУНИКАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА И СПОСОБ ЕЁ ПРОЕКТИРОВАНИЯ | 2022 |
|
RU2792329C1 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ДИСПЕТЧЕРИЗАЦИИ ЯДРА ПРОЦЕССОРА В СИСТЕМЕ ЯДРА МУЛЬТИПРОЦЕССОРА | 2013 |
|
RU2577476C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ВОЗМОЖНОГО СЛОВА И ГРАФИЧЕСКИЙ ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС | 2021 |
|
RU2774211C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ОБЪЕКТА | 2007 |
|
RU2349961C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ БУРОВОГО ДОЛОТА ДО ЗАБОЯ СКВАЖИНЫ | 2015 |
|
RU2673244C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МОШЕННИЧЕСКИХ ЗВОНКОВ И ОПОВЕЩЕНИЯ О НИХ АБОНЕНТОВ | 2022 |
|
RU2820329C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕЗЕРВНОГО КОПИРОВАНИЯ ДАННЫХ И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2015 |
|
RU2629434C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДКЛЮЧАЕМЫМ МОДУЛЕМ МАРШРУТИЗАТОРА | 2015 |
|
RU2632396C2 |
| СПОСОБ И ИНТЕГРИРОВАННАЯ СИСТЕМА ИНДИВИДУАЛЬНОГО УЧЕТА И РЕГУЛИРОВАНИЯ ПОТРЕБЛЕНИЯ ЭНЕРГОРЕСУРСОВ В ЖИЛИЩНО-КОММУНАЛЬНОМ ХОЗЯЙСТВЕ | 2005 |
|
RU2296305C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ ЗАПРОСА НА ДИСПЕТЧЕРИЗАЦИЮ И ОТНОСЯЩИЙСЯ К НЕМУ ПРОДУКТ | 2017 |
|
RU2728898C1 |
Изобретение предполагает интеллектуальную интегрированную систему управления диспетчеризацией кронблоков, которая относится к технической области интеллектуальной интеграции оборудования в металлургической промышленности и включает в себя следующие компоненты: систему управления информатизацией производства MES, модуль диспетчерского управления, интеллектуальный вспомогательный модуль и модуль кронблока. Система управления информатизацией производства MES отправляет указания по производственному заданию в модуль диспетчерского управления, а интеллектуальный вспомогательный модуль возвращает вспомогательную информацию для логического решения в модуль диспетчерского управления. Модуль управления диспетчеризацией на основании указаний производственного задания и вспомогательной информации формирует инструкцию на выполнение диспетчеризации производства кронблока и отправляет ее в модуль кронблока. Модуль кронблока получает и выполняет команду диспетчерского управления производством кронблока, выданную модулем управления диспетчеризацией для завершения задачи автоматической обработки материалов плит, а затем передает результат выполнения инструкции модулю диспетчерского управления и диспетчерскому управлению. Модуль получает результат выполнения, переданный модулем кронблока, для корректировки выполнения диспетчеризации производства кронблока. Система, предлагаемая изобретением, способна обеспечить автоматическую работу зоны хранения плит и способствовать интеллектуальному развитию производства на предприятии. 9 з.п. ф-лы, 3 ил.
1. Интеллектуальная интегрированная система управления диспетчеризацией кронблоков для управления погрузочно-разгрузочными работами и диспетчеризацией материалов для изготовления плит, отличающаяся тем, что она включает в себя:
систему управления информатизацией производства MES, модуль диспетчерского управления, интеллектуальный вспомогательный модуль и модуль кронблока;
система информатизации производства MES отправляет указания по производственному заданию в модуль управления диспетчеризацией, интеллектуальный вспомогательный модуль возвращает вспомогательную информацию, используемую для логического решения по диспетчеризации производства при транспортировке материала для производства плит в модуль управления диспетчеризацией, модуль управления диспетчеризацией на основании указаний по производственному заданию и вспомогательной информации формирует инструкцию на выполнение диспетчеризации производства кронблока и отправляет ее в модуль кронблока, модуль кронблока получает и выполняет команду для диспетчерского управления производством кронблока, изданную модулем управления диспетчеризацией для завершения задачи автоматической обработки материалов плит, а затем передает результат выполнения инструкции модулю диспетчерского управления, при этом модуль получает результат выполнения, возвращенный модулем кронблока, для корректировки выполнения диспетчеризации производства кронблока.
2. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 1, отличающаяся тем, что указания по производственному заданию, выдаваемые системой управления информатизацией производства MES, представляют собой ежедневный план работы участка склада плит, а модуль диспетчерского управления подразделяет полученный суточный план работы склада плит для формирования расписания задач;
интеллектуальный вспомогательный модуль передает вспомогательную информацию, используемую для логического определения производственной диспетчеризации при обработке плит, в модуль управления диспетчеризацией, при этом вспомогательная информация содержит следующие компоненты: информацию о данных плит и информацию о безопасности на площадке в зоне хранения плит, при этом данные плит содержат следующую информацию: информацию идентификатора плиты, информацию о размере плиты и информацию о физических координатах плиты;
модуль управления диспетчеризацией формирует команду выполнения диспетчеризации производства кронблоков на основе расписания задач, информации об идентификаторе плиты, информации о размере плиты, информации о физических координатах плиты и информации о безопасности зоны хранения плиты;
модуль управления диспетчеризацией получает результат выполнения, переданный модулем кронблока, а когда информация о данных плиты изменяется, модуль управления диспетчеризацией обновляет вспомогательную информацию, переданную интеллектуальным вспомогательным модулем, при этом корректируя команду выполнения диспетчеризации производства кронблока в соответствии с технологией производственного задания и обновленной вспомогательной информацией, а также посредством объединения фактического состояния зоны хранения плит.
3. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 1, отличающаяся тем, что модуль кронблока содержит блок связи кронблока, корпус кронблока, блок позиционирования с защитой от вибрации, блок перемещения кронблока, блок определения состояния зажима и блок обнаружения зажатия материала зажима;
один конец блока связи кронблока соответственно соединен с корпусом кронблока, блоком позиционирования против вибрации, блоком перемещения кронблока, блоком определения состояния зажима и блоком обнаружения зажатия материала зажима, другой конец блока связи кронблока находится в двунаправленной связи с модулем диспетчерского управления, блок связи с кронблоком получает указания по выполнению диспетчеризации производства кронблока, издаваемые модулем управления диспетчеризацией, а указания по выполнению диспетчеризации производства кронблока содержат инструкцию по регулировке скорости, инструкцию по позиционированию с защитой от вибрации, инструкцию по автоматическому перемещению, инструкцию по обнаружению состояния зажима и зажатия материала зажима, инструкцию по обнаружению, затем эта инструкция передается в корпус кронблока, блок позиционирования против вибрации, блок определения состояния зажима, блок обнаружения зажатия материала зажима и блок перемещения кронблока для выполнения, наконец, результаты выполнения корпуса кронблока, блок позиционирования с защитой от вибрации, блок определения состояния зажима, блок обнаружения зажатия материала зажима и блок перемещения кронблока передаются обратно в модуль управления диспетчеризацией через блок связи кронблока;
блок связи кронблока управляет автоматической работой корпуса кронблока в соответствии с инструкцией по регулировке скорости, а также предотвращаются столкновения и выполняется автоматическое замедление нескольких кронблоков; подвижный блок кронблока совершает перемещение кронблока к целевым координатам в соответствии с целевыми координатами, указанными в инструкции по автоматическому перемещению, и передает обратно навигационные данные в реальном времени в модуль управления диспетчеризацией через блок связи кронблока; блок позиционирования с защитой от вибрации получает команду позиционирования с защитой от вибрации, позиционирует положение корпуса кронблока, управляет кронблоком для выполнения действий по перемещению и подъему в соответствии с положением корпуса кронблока и сигналами положения подъема, а также загружает реальные данные - данные временного противовибрационного позиционирования в модуль диспетчерского управления через блок связи кронблока; блок обнаружения состояния фиксации получает команду обнаружения состояния фиксации, определяет, открыто или закрыто состояние фиксации кронблока, затем загружает обнаруженные данные в реальном времени в модуль управления диспетчеризацией через блок связи кронблока; блок обнаружения зажатия материала зажима получает команду обнаружения зажатия материала зажима, определяет результат того, что зажим кронблока зажимает материалы плиты, достигает цели зажатия, перемещения и укладки материала плиты и загружает обнаруженные данные в режиме реального времени в модуль диспетчерского управления через блок связи кронблока.
4. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 3, отличающаяся тем, что модель управления позиционированием с защитой от вибрации, преобразователь частоты и двигатель расположены в блоке позиционирования с защитой от вибрации, а модель управления позиционированием с защитой от вибрации содержит следующее: контроллер, модуль объекта управления и модуль обнаружения положения объекта управления, при этом целевое положение Lt используется в качестве входа регулятора скорости, регулятор скорости соединен с модулем объекта управления, выход модуля объекта управления используется как вход модуля положения объекта управления обнаружением, позиция Lc текущего объекта управления возвращается в целевое положение Lt, модель управления позиционированием с защитой от вибрации представляет собой модель управления закрытого цикла, а объект управления в модуле объекта управления является тележкой или ручной тележкой корпуса кронблока, пусть Lwindow представляет собой пороговое значение критериев управления, Lmin представляет заданное расстояние замедления, Vmin представляет минимальную заданную скорость, Vmax представляет максимальную заданную скорость, а ΔL представляет значение разницы объекта управления от целевого положения и выполняет следующие действия после того, как блок позиционирования с защитой от вибрации получает указание о позиционировании с защитой от вибрации:
S1. суждение относительно того, удовлетворяет ли значение разницы объекта управления относительно целевой позиции ΔL следующему: Lwindow<ΔL≤Lmin, если да, расчет текущей скорости v объекта управления, где формула следующая:
 ,
,
затем выполняется этап S2; в противном случае оценивается суждение относительно того, удовлетворяет ли значение разницы объекта управления относительно целевой позиции ΔL следующему: ΔL>Lmin, при положительном ответе текущая скорость v объекта управления получается Vmax, в противном случае текущая скорость v объекта управления принимается равной нулю, и выполняется этап S3;
S2. оценивается, соответствует ли текущая скорость v объекта управления следующим условиям: v≤Vmin, если да, то определяется текущая скорость v объекта управления Vmin и выполняется этап S3; в противном случае выполняется этап S3;
S3. конвертация текущей скорости v в заданное значение с помощью преобразователя частоты для предотвращения вибрации и управление двигателем для преобразования скорости после запуска преобразователя частоты на начальном этапе посредством наклона преобразователя частоты; если преобразователь частоты не запускается, преобразование скорости осуществляется напрямую путем управления двигателем;
при этом блок кронблока перемещает кронблок к целевым координатам посредством действий двигателя на основе модели управления позиционированием с защитой от вибрации, преобразователя частоты и двигателя, расположенных в блоке позиционирования с защитой от вибрации, в соответствии с целевыми координатами, заданными в автоматическом режиме обучения перемещению.
5. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 3, отличающаяся тем, что блок определения состояния зажима получает команду определения состояния зажима, а блок обнаружения зажатия материала зажима получает команду обнаружения зажима материала зажима, когда зажим опускается, срабатывает сенсорный переключатель материала, сигнал настройки «1» указывает на то, что материал плиты находится в стабильном контакте с зажимом, а сигнал настройки «0» указывает на то, что материал плиты не находится в стабильном контакте с зажимом;
после того, как зажим оказывается в устойчивом контакте с материалом плиты, зажим безопасно поднимается, когда время достижения заданной высоты превышает ts секунд, если сигнал равен «0», блок обнаружения состояния зажима подаст оповещение, и зажим не поднимется;
когда зажим открыт, сигнал переключателя открытия и закрытия зажима равен «1», а когда зажим закрыт, сигнал переключателя открытия и закрытия зажима равен «0», если сигнал переключателя материала касания устройства срабатывания равен «1», а сигнал переключателя открытия и закрытия зажима равен «1», это указывает на то, что материал надежно зажат; в зависимости от того, движется ли корпус кронблока или нет, перемещение материала подтверждается или не подтверждается; если сигнал переключателя материала касания устройства срабатывания равен «0», а сигнал переключателя открытия и закрытия зажима равен «0», это указывает на то, что материал уложен.
6. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 1, отличающаяся тем, что интеллектуальный вспомогательный модуль содержит блок сбора данных, блок обнаружения плиты, блок беспроводной связи и блок безопасности на площадке; блок сбора данных отвечает за взаимодействие данных модуля кронблока, модуля диспетчерского управления и интеллектуального вспомогательного модуля; блок обнаружения плиты содержит блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты, которые соответственно используются для распознавания идентификатора плиты, измерения размера плиты и определения физических координат плиты для реализации операций по поступлению на склад и складированию, вывода данных отслеживания выбытия плиты; блок беспроводной связи предназначен для управления беспроводным взаимодействием модуля кронблока, модуля диспетчерского управления и интеллектуального вспомогательного модуля; блок безопасности на площадке используется для реагирования на механизм безопасности зоны хранения плит; блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты блока обнаружения плиты находятся в высокотемпературной среде, при этом блок распознавания идентификатора плиты, блок измерения размера плиты и блок сканирования плиты соответственно используются для распознавания идентификатора плиты, измерения размера плиты и определения физических координат плиты; в рабочем цикле используется промышленная камера и оборудование лазерного сканирования, при этом на промышленной камере дополнительно установлено взрывозащищенное устройство с водяным охлаждением, обеспечивающее снижение температуры за счет режима водяного охлаждения, и устройство воздушного охлаждения, которое также дополнительно расположено на периферии оборудования лазерного сканирования, так что температуру можно снизить за счет режима воздушного охлаждения;
после того, как информация о плите собрана блоком распознавания идентификатора плит, блоком измерения размера плит и блоком сканирования плит блока обнаружения плит, фильтрация данных с помощью метода фильтрации, удаление точек за пределами выбранной границы и аномальных точек, а также выполнение извлечения признаков, распознавания идентификаторов, измерения размеров и сканирования на основе машинного распознавания и алгоритма глубокого обучения.
7. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 6, отличающаяся тем, что блок распознавания идентификатора плиты снабжен первым коллектором, а первый коллектор включает в себя переключатель обнаружения плит, промышленную камеру, источник света и контроллер, когда материал плиты поступает в интеллектуальную интегрированную систему управления диспетчеризацией кронблоков через роликовый путь, срабатывает переключатель обнаружения плит и запускается функция распознавания блока распознавания идентификатора плит, после чего распознавание символов OCR будет реализовано на основе алгоритма глубокого обучения и сбора информации, данные, передаваемые в модуль управления диспетчеризацией блоком распознавания идентификатора плит, включают в себя следующее: отметку системного времени, идентификационный номер плиты; при этом один блок распознавания идентификаторов плит расположен на входе и выходе из зоны хранения плит, после получения модулем управления диспетчеризацией идентификационного номера плиты, сопоставление идентификационного номера плиты с указаниями производственного задания, изданными системой управления производственной информатизацией MES, а также если идентификационный номер плиты существует в инструкции производственного задания, изданной системой управления производственной информатизацией MES, план будет сопоставлен, в противном случае идентификационный номер плиты используется в качестве нового дополнения, а модуль управления диспетчеризацией отправит вновь добавленный план в MES как фактическую производительность для обработки, тем самым реализуя замкнутый цикл данных отслеживания плит.
8. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 6, отличающаяся тем, что блок распознавания идентификатора плиты снабжен вторым коллектором, а второй коллектор включает в себя промышленную камеру, источник света и контроллер, блок измерения размеров плиты реализует измерение физических размеров длины, ширины и высоты плиты на основе метода расчета поля зрения, при этом данные о результатах измерения размеров передаются обратно в модуль диспетчерского управления, в том числе следующие данные: метка системного времени, максимальная длина плиты, минимальная длина плиты, максимальная ширина плиты, минимальная ширина плиты, максимальная толщина плиты и минимальная толщина плиты, один блок измерения размера плиты расположен на входе и выходе из зоны хранения плит для реализации замкнутого цикла данных отслеживания плит.
9. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 6, отличающаяся тем, что третий коллектор расположен на блоке сканирования плит, а третий коллектор представляет собой лазерный сканер, на основе данных облака точек выполнение извлечения элементов плиты с помощью третьего коллектора, фильтрация данных после получения сканированных данных облака точек, удаление точек за пределами выбранной границы и аномальных точек, окончательное объединение для создания файла PCD, определение физических координат плиты и идентификация подачи, а также данные результата возвращаются в модуль управления диспетчеризацией, включая следующее: системную отметку времени, длину плиты, ширину плиты и координаты центра плиты.
10. Интеллектуальная интегрированная система управления диспетчеризацией кронблока по п. 6, отличающаяся тем, что блок безопасности на площадке содержит датчик контроля доступа и карту получения изображения, карта получения изображения и датчик контроля доступа расположены во множестве положений на автоматизированной площадке цеха по производству слябов, когда карта получения изображения или датчик контроля доступа обнаруживают, что рабочий входит в цех, модуль диспетчерского управления запускает механизм безопасности, а блок безопасности на площадке реагирует на механизм безопасности, после чего подается оповещение о рабочем в цеху, в этом случае цех отправляется в модуль управления диспетчеризацией, а модуль управления диспетчеризацией запускает рабочий механизм в соответствии с полученным сигналом, при этом рабочий механизм имеет общий уровень и важный уровень; когда рабочий механизм находится на общем уровне, модуль диспетчерского управления подает звуковую и визуальную сигнализацию и предоставляет подсказки пользовательского интерфейса; когда рабочий механизм находится на важном уровне, интеллектуальная интегрированная система управления диспетчеризацией кронблоков останавливается до тех пор, пока нарушение безопасности, вызванное приходом рабочего, не будет устранено.
| CN 111123868 A, 08.05.2020 | |||
| CN 108762202 A, 06.11.2018 | |||
| CN 105427028 A, 23.03.2016 | |||
| Устройство для ультразвукового орошения лекарственными веществами | 1990 |
|
SU1801017A3 |

