[01] Настоящая заявка испрашивает приоритет по предварительной заявке на патент США №62/140,705, которая была подана 31 марта 2015 года, и по предварительной заявке на патент США №62/094,502, которая была подана 19 декабря 2014 года. Содержание обеих этих приоритетных заявок включено в данный документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[02] При осуществлении операций бурения, контроль и обновление данных о длине бурильной колонны может производиться различными инструментами. Поддержание точных и в целом актуальных данных измерения длины бурильной колонны может иметь различные применения. Например, известная длина бурильной колонны может способствовать поддержанию эксплуатационной безопасности. При отсутствии надлежащего контроля глубины бурения, не зная о приближении нижнего конца скважины, бурильщик может столкнуть всю бурильную колонну с горной породой на полной скорости, что потенциально может привести к серьезному повреждению оборудования и эксплуатационным проблемам.
[03] Другое применение заключается в корреляции глубин. Например, конкретная цель (например, резервуар) может иметь определенную глубину, или точка зарезки отклоненного участка скважины может быть указана на основании глубины бурения. Длина бурильной колонны может быть использована как приблизительный расчет глубины бурения, и, следовательно, оператор по бурению может понимать, что такое событие произошло (или произойдет) при достижении определенной длины колонны. Кроме того, записи о наступлении событий, каротажей и т.д. могут быть привязаны к глубине бурения посредством длины бурильной колонны, обеспечивая представление о свойствах подземного пласта.
[04] В общем длину бурильной колонны измеряют с использованием устройства кодирования на буровой лебедке буровой установки. Во многих буровых установках буровая лебедка представляет собой лебедку, управляющую подъемом и спуском талевого блока, что в свою очередь регулирует высоту верхнего привода и бурильной колонны, соединенной с ним. Устройство кодирования записывает обороты, или, в противном случае, угловое положение, лебедки, что, в свою очередь, предоставляет расстояние, на которое был опущен талевый блок. При полном развертывании свечи, блок может быть повторно поднят с использованием буровой лебедки, и процесс может быть повторен.
[05] Однако измерение устройства кодирования буровой лебедки может иметь присущую ошибку, обусловленную радиусом слоя бурового каната относительно центра буровой лебедки, растяжением бурового каната под воздействием нагрузки на крюк (которая сама может изменяться, например, вследствие давлений в стволе скважины, и т.д.) и т.п. Соответственно, кабель измерителя скорости углубления ствола иногда используют для калибровки устройства кодирования буровой лебедки. Кабель измерителя скорости углубления ствола представляет собой кабель, присоединенный непосредственно к верхнему приводу или блоку. Для кабеля предоставлена система извлечения кабеля с кодирующим датчиком, причем оба присоединены к заданной точке на полу буровой установки или рядом с ним. Затем кабель измерителя скорости углубления ствола перемещается вверх и вниз по буровой вышке с верхним приводом, и при этом устройство кодирования измеряет количество размотанного или смотанного кабеля.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[06] Варианты реализации изобретения могут предоставлять способ бурения ствола скважины. Способ включает измерение первого расстояния, на которое бурильное устройство поднимают в соединении с бурильной колонной, определение нагрузки на долото в бурильной колонне, определение второго расстояния для спускания бурильного устройства таким образом, что буровое долото на нижнем конце бурильной колонны приближается к забою ствола скважины, на основании первого расстояния и нагрузки на долото, и спуск бурильного устройства на второе расстояние.
[07] Варианты реализации изобретения могут также предоставлять систему буровой установки. Система содержит бурильное устройство, выполненное с возможностью вращения бурильной колонны, пол буровой установки, через который принимают бурильную колонну, буровую лебедку, соединенную с бурильным устройством посредством бурового каната, причем буровая лебедка выполнена с возможностью поднимания и опускания бурильного устройства относительно пола буровой установки путем наматывания и разматывания бурового каната, датчик, выполненный с возможностью определения высоты бурильного устройства; и вычислительное устройство, выполненное с возможностью обеспечения выполнения операций системой буровой установки. Операции включают измерение первого расстояния, на которое бурильное устройство поднимают в соединении с бурильной колонной, определение нагрузки на долото в бурильной колонне, определение второго расстояния для спускания бурильного устройства таким образом, что буровое долото на нижнем конце бурильной колонны приближается к забою ствола скважины, на основании первого расстояния и нагрузки на долото, и спуск бурильного устройства на второе расстояние.
[08] Варианты реализации изобретения могут также предоставлять измерительную систему для буровой установки. Система содержит множество маркеров высоты и датчик, выполненный с возможностью перемещения посредством буровой лебедки буровой установки. Буровая лебедка выполнена с возможностью перемещения талевого блока, соединенного с бурильным устройством буровой установки, а датчик также выполнен с возможностью определения высоты бурильного устройства путем обнаружения множества маркеров высоты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[09] Сопроводительные чертежи, включенные в настоящий документ и составляющие его часть, иллюстрируют варианты реализации настоящего изобретения и вместе с описанием служат для объяснения принципов настоящего изобретения. На фигурах:
[010] На фиг. 1 показан схематический вид буровой установки и системы управления в соответствии с вариантом реализации.
[011] На фиг. 2 показан схематический вид буровой установки и удаленной среды вычислительных ресурсов в соответствии с вариантом реализации.
[012] На фиг. 3A, 3B и 3C показаны концептуальные схематические виды сбоку трех вариантов реализации автоматической системы калибровки.
[013] На фиг. 4A показана блок-схема способа автоматической калибровки измерения глубины бурения в соответствии с вариантом реализации.
[014] На фиг. 4B показан график зависимости действительной от измеренной глубины в калиброванной системе и в некалиброванной системе в соответствии с вариантом реализации.
[015] На фиг. 5 и 6 показаны схематические виды автоматической системы калибровки в соответствии с вариантом реализации.
[016] На фиг. 7 показан схематический вид системы, отслеживающей движение трубы, в соответствии с вариантом реализации.
[017] На фиг. 8 показана блок-схема способа измерения длины трубчатого элемента в соответствии с вариантом реализации.
[018] На фиг. 9 и 10 показаны схематические виды сбоку буровой установки на различных стадиях во время осуществления способа по фиг. 8 в соответствии с вариантом реализации.
[019] На фиг. 11 показана блок-схема способа бурения в соответствии с вариантом реализации.
[020] На фиг. 12 показан схематический вид сбоку буровой установки, содержащей бурильную колонну, развернутую в стволе скважины, в соответствии с вариантом реализации.
[021] На фиг. 13 показан схематический вид вычислительной системы в соответствии с вариантом реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[022] Далее будет приведено подробное раскрытие конкретных вариантов реализации, изображенных на сопроводительных чертежах и фигурах. Для обеспечения полного понимания настоящего изобретения в нижеследующем подробном описании изложены многочисленные конкретные детали. Однако специалисту в данной области техники будет понятно, что изобретение может быть применено на практике и без этих конкретных деталей. В других примерах подробности хорошо известных способов, процедур, компонентов, схем и сетей не описываются, чтобы чрезмерно не затруднять понимание аспектов вариантов реализации.
[023] Также следует понимать, что, несмотря на то, что термины первый, второй и т.д. могут быть использованы в настоящем документе для описания различных элементов, эти элементы не ограничены этими терминами. Эти термины использованы исключительно для различения одного элемента от другого. Например, первый объект может быть назван вторым объектом или этапом, и, аналогично, второй объект может быть назван первым объектом или этапом, без отклонения от объема настоящего изобретения.
[024] Терминология, используемая в описании изобретения в данном документе, предназначена для описания определенных вариантов реализации и не имеет ограничительного характера. В описании изобретения и прилагаемой формуле изобретения формы единственного числа включают также формы множественного числа, если из контекста явно не следует иное. Также следует понимать, что используемый в настоящем документе термин "и/или" означает и охватывает любые и все возможные сочетания одного или более из соответствующих упомянутых предметов. Также следует понимать, что термины "включает", "включающий", "содержит" и/или "содержащий", при их применении в данном описании, указывают на наличие определенных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают наличие либо добавление одного или более других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их групп. Кроме того, используемый в настоящем документе термин "если" может означать "когда" или "после", или "в ответ на обнаружение", или "в ответ на обнаружение" в зависимости от контекста.
[025] На фиг. 1 показан концептуальный схематический вид системы 100 управления для буровой установки 102 в соответствии с вариантом реализации. Система 100 управления может содержать среду 105 вычислительных ресурсов буровой установки, которая может быть расположена на площадке на буровой установке 102, и в некоторых вариантах реализации может содержать устройство 104 координированного управления. Система 100 управления может также предоставлять систему 107 диспетчерского управления. В некоторых вариантах реализации система 100 управления может содержать удаленную среду 106 вычислительных ресурсов, которая может быть расположена за пределами буровой установки 102.
[026] Удаленная среда 106 вычислительных ресурсов может содержать вычислительные ресурсы, расположенные за пределами буровой установки 102 и доступные через сеть. "Облачная" вычислительная среда является одним примером удаленного вычислительного ресурса. Облачная вычислительная среда может сообщаться со средой 105 вычислительных ресурсов буровой установки посредством сетевого соединения (например, соединение по глобальной вычислительной сети (WAN) или локальной вычислительной сети (LAN)).
[027] Также буровая установка 102 может содержать различные системы с различными датчиками и оборудованием для осуществления операций буровой установки 102, а контроль и управление ей может быть осуществлено посредством системы 100 управления, например, среды 105 вычислительных ресурсов буровой установки. Дополнительно, среда 105 вычислительных ресурсов буровой установки может обеспечивать возможность защищенного доступа к данным буровой установки для способствования контролю буровой установки посредством расположенных на площадке и внеплощадочных устройств, отправке процессов управления к буровой установке и т.п.
[028] Различные приведенные в качестве примера системы буровой установки 102 изображены на фиг. 1. Например, буровая установка 102 может содержать скважинную систему 110, систему 112 текучей среды и центральную систему 114. В некоторых вариантах реализации буровая установка 102 может содержать информационно-вычислительную систему 116. Скважинная система 110 может содержать, например, компоновку низа бурильной колонны (BHA), забойные двигатели, датчики и т.д., расположенные вдоль бурильной колонны, и/или другое бурильное оборудование, выполненное с возможностью развертывания в стволе скважины. Соответственно, скважинная система 110 может означать приспособления, расположенные в стволе скважины, например, как часть бурильной колонны, используемой для бурения скважины.
[029] Система 112 текучей среды может содержать, например, буровой раствор, насосы, клапаны, цемент, оборудование для подачи бурового раствора, оборудование для управления буровым раствором, оборудование для управления давлением, сепараторы и другое оборудование для текучих сред. Соответственно, система 112 текучей среды может осуществлять операции буровой установки 102, связанные с текучей средой.
[030] Центральная система 114 может содержать подъемную и поворотную платформу, верхние приводы, роторные столы, ведущие трубы, буровую лебедку, насосы, генераторы, оборудование подачи и укладки труб, буровые вышки, буровые мачты, фундаментные рамы и другое подходящее оборудование. Соответственно, центральная система 114 может осуществлять генерацию электропитания, операции подъема и поворота буровой установки 102, и выполнять функцию опорной платформы для бурильного оборудования, и места осуществления работ на буровой установке, таких как дополнение соединения и т.д. Информационно-вычислительная система 116 может содержать программное обеспечение, компьютеры и другое информационно-вычислительное оборудование для осуществления информационно-вычислительных операций буровой установки 102.
[031] Система 100 управления, например, посредством устройства 104 координированного управления среды 105 вычислительных ресурсов буровой установки может осуществлять контроль датчиков из нескольких систем буровой установки 102 и подавать управляющие команды на несколько системы буровой установки 102 таким образом, что данные датчиков из нескольких систем могут быть использованы для подачи управляющих команд на различные системы буровой установки 102. Например, система 100 может собирать наземные данные, выровненные по времени и глубине, и скважинные данные от буровой установки 102, и хранить собранные данные для доступа на площадке рядом с буровой установкой 102 или за пределами площадки посредством среды 105 вычислительных ресурсов буровой установки. Таким образом система 100 может предоставлять возможность контроля. Дополнительно, система 100 управления может содержать диспетчерское управление посредством системы 107 диспетчерского управления.
[032] В некоторых вариантах реализации одна или более из скважинной системы 110, системы 112 текучей среды и/или центральной системы 114, может быть изготовлена и/или эксплуатироваться различными поставщиками. В таком варианте реализации определенные системы могут не иметь возможности объединенного управления (например, вследствие различных протоколов, ограничений разрешений управления и т.д.). Однако вариант реализации объединенной системы 100 управления может обеспечивать управление буровой установкой 102 и связанными с ней системами (например, скважинная система 110, система 112 текучей среды и/или центральная система 114).
[033] На фиг. 2 показан концептуальный схематический вид системы 100 управления в соответствии с вариантом реализации. Среда 105 вычислительных ресурсов буровой установки может сообщаться с внеплощадочными устройствами и системами с использованием сети 108 (например, глобальной вычислительной сети (WAN), такой как Интернет). Также, среда 105 вычислительных ресурсов буровой установки может сообщаться с удаленной средой 106 вычислительных ресурсов через сеть 108. На фиг. 2 также показаны вышеуказанная приведенные в качестве примера системы буровой установки 102, такие как скважинная система 110, система 112 текучей среды, центральная система 114 и информационно-вычислительная система 116. В некоторых вариантах реализации одно или более пользовательских устройств 118, расположенных на площадке, могут быть включены в буровую установку 102. Пользовательские устройства 118, расположенные на площадке, могут взаимодействовать с информационно-вычислительной системой 116. Пользовательские устройства 118, расположенные на площадке, могут содержать любое количество пользовательских устройств, например, стационарных пользовательских устройств, предназначенных для расположения на буровой установке 102, и/или портативных пользовательских устройств. В некоторых вариантах реализации пользовательские устройства 118, расположенные на площадке, могут включать настольный компьютер, ноутбук, смартфон, карманный персональный компьютер (PDA), планшетный элемент, носимый компьютер или любые другие подходящие устройства. В некоторых вариантах реализации пользовательские устройства 118, расположенные на площадке, могут сообщаться со средой 105 вычислительных ресурсов буровой установки 102, удаленной средой 106 вычислительных ресурсов или с обеими из них.
[034] Одно или более внеплощадочных пользовательских устройств 120 могут быть также включены в систему 100. Внеплощадочные пользовательские устройства 120 могут включать настольный компьютер, ноутбук, смартфон, карманный персональный компьютер (PDA), планшетный элемент, носимый компьютер или любые другие подходящие устройства. Внеплощадочные пользовательские устройства 120 могут быть выполнены с возможностью приема и/или передачи информации (например, данные контроля функциональности) от буровой установки 102 и/или к ней через сообщение со средой 105 вычислительных ресурсов буровой установки. В некоторых вариантах реализации внеплощадочные пользовательские устройства 120 могут предоставлять управляющие процессы для управления работой различных систем буровой установки 102. В некоторых вариантах реализации внеплощадочные пользовательские устройства 120 могут сообщаться с удаленной средой 106 вычислительных ресурсов через сеть 108.
[035] Системы буровой установки 102 могут содержать различные датчики, приводы и контроллеры (например, программируемые логические контроллеры (PLC)). Например, скважинная система 110 может содержать датчики 122, приводы 124 и контроллеры 126. Система 112 текучей среды может содержать датчики 128, приводы 130 и контроллеры 132. Дополнительно, центральная система 114 может содержать датчики 134, приводы 136 и контроллеры 138. Датчики 122, 128 и 134 могут включать любые подходящие датчики для работы буровой установки 102. В некоторых вариантах реализации датчики 122, 128 и 134 могут включать камеру, датчик давления, датчик температуры, датчик расхода, датчик вибрации, датчик тока, датчик напряжения, датчик сопротивления, датчик или устройство распознавания жестов, устройство или датчик, приводимый в действие голосом или выполненный с возможностью распознавания речи, или другие подходящие датчики.
[036] Описанные ранее датчики могут передавать данные датчиков среде 105 вычислительных ресурсов буровой установки (например, устройству 104 координированного управления). Например, датчики 122 скважинной системы могут передавать данные 140 датчиков, датчики 128 системы текучей среды могут передавать данные 142 датчиков, а датчики 134 центральной системы могут передавать данные 144 датчиков. Данные 140, 142 и 144 датчиков могут включать, например, рабочее состояние оборудования (например, включен или выключен, вверху или внизу, приведен в рабочее или нерабочее состояние и т.д.), параметры бурения (например, глубина, нагрузка на крюк, крутящий момент и т.д.), вспомогательные параметры (например, данные о вибрации насоса) и другие подходящие данные. В некоторых вариантах реализации полученные данные датчиков могут включать отметку времени (например, дату, время или и то и другое), указывающую на то, когда были получены данные датчиков, или быть связаны с ней. Также, данные датчиков могут быть выровнены с глубиной или другим параметром бурения.
[037] Получение данных датчиков на устройстве 104 координированного управления может способствовать измерению одинаковых физических свойств на различных участках буровой установки 102. В некоторых вариантах реализации измерение одинаковых физических свойств может быть использовано для избыточности измерений для обеспечения возможности непрерывной работы скважины. В еще одном варианте реализации измерения одинаковых физических свойств на различных участках могут быть использованы для обнаружения состояний оборудования среди различных физических участков. Изменение в измерениях на различных участках в зависимости от времени может быть использовано для определения производительности оборудования, производительности системы, сроков выполнения запланированных профилактических работ и т.п. Например, данные состояния плашки (например, внутри или снаружи) могут быть получены от датчиков и переданы среде 105 вычислительных ресурсов буровой установки. В другом примере получение образцов текучей среды может быть измерено датчиком и сопоставлено с глубиной долота и временем, измеренными другими датчиками. Получение данных от датчика с камерой может способствовать обнаружению поступления и/или установки материалов или оборудования в буровой установке 102. Время поступления и/или установки материалов или оборудования может быть использовано для оценки разрушения материала, запланированного технического обслуживания оборудования и других оценок.
[038] Устройство 104 координированного управления может способствовать управлению отдельными системами (например, центральной системой 114, скважинной системой или системой 112 текучей среды и т.д.) на уровне каждой отдельной системы. Например, в системе 112 текучей среды данные 128 датчиков могут быть введены в контроллер 132, который может отвечать для управления приводами 130. Однако для управления операциями, которые задействуют несколько систем, управление может быть координировано посредством устройства 104 координированного управления. Примеры таких операций с координированным управлением включают управление скважинным давлением во время спускоподъемных операций. Скважинное давление может быть подвержено воздействию системы 112 текучей среды (например, расход насоса и положение штуцера) и центральной системы 114 (например, скорость спускоподъемных операций). При необходимости поддержания определенного скважинного давления во время спускоподъемных операций, устройство 104 координированного управления может быть использовано для направления подходящих управляющих команд.
[039] В некоторых вариантах реализации управление различными системами буровой установки 102 может быть осуществлено посредством трехуровневой системы управления, которая содержит первый уровень контроллеров 126, 132 и 138, второй уровень устройства 104 координированного управления и третий уровень системы 107 диспетчерского управления. В других вариантах реализации координированное управление может быть обеспечено одним или более контроллерами одной или более систем 110, 112 и 114 буровой установки без использования устройства 104 координированного управления. В таких вариантах реализации среда 105 вычислительных ресурсов буровой установки может предоставлять управляющие процессы непосредственно этим контроллерам для координированного управления. Например, в некоторых вариантах реализации контроллеры 126 и контроллеры 132 могут быть использованы для координированного управления несколькими системами буровой установки 102.
[040] Данные 140, 142 и 144 датчиков могут быть получены устройством 104 координированного управления и использованы для управления буровой установкой 102 и системами 110, 112 и 114 буровой установки. В некоторых вариантах реализации данные 140, 142 и 144 датчиков могут быть зашифрованы для предоставления зашифрованных данных 146 датчиков. Например, в некоторых вариантах реализации среда 105 вычислительных ресурсов буровой установки может зашифровывать данные датчиков от различных типов датчиков и систем для предоставления набора зашифрованных данных 146 датчиков. Таким образом, зашифрованные данные 146 датчиков могут не быть недоступны для просмотра неавторизованными пользовательскими устройствами (внеплатформное или расположенное на платформе пользовательское устройство), если эти устройства получают доступ к одной или более сетям буровой установки 102. Зашифрованные данные 146 датчиков могут включать отметку времени и выровненный параметр бурения (например, глубину), как описано ранее. Зашифрованные данные 146 датчиков могут быть отправлены к удаленной среде 106 вычислительных ресурсов через сеть 108 и храниться, как зашифрованные данные 148 датчиков.
[041] Среда 105 вычислительных ресурсов буровой установки может предоставлять зашифрованные данные 148 датчиков, доступные для внеплощадочного просмотра и обработки, например, через внеплощадочные пользовательские устройства 120. Доступ к зашифрованным данным 148 датчиков может быть ограничен посредством управления доступом, реализованного в среде 105 вычислительных ресурсов буровой установки. В некоторых вариантах реализации зашифрованные данные 148 датчиков могут быть предоставлены в режиме реального времени внеплощадочным пользовательским устройствам 120 таким образом, что внеплощадочный персонал может просматривать данные о состоянии буровой установки 102 в реальном времени и предоставлять обратную связь на основании реально-временных данных датчиков. Например, различные части зашифрованных данных 146 датчиков могут быть отправлены внеплощадочным пользовательским устройствам 120. В некоторых вариантах реализации зашифрованные данные датчиков могут быть раскодированы средой 105 вычислительных ресурсов буровой установки перед передачей, или раскодированы на внеплощадочном пользовательском устройстве после получения зашифрованных данных датчиков.
[042] Внеплощадочное пользовательское устройство 120 может содержать тонкий клиент, выполненный с возможностью отображения данных, полученных от среды 105 вычислительных ресурсов буровой установки и/или удаленной среды 106 вычислительных ресурсов. Например, для определенных функций или для просмотра различных данных датчиков могут быть использованы несколько типов тонких клиентов (например, устройства с возможностью отображения и минимальной возможностью обработки).
[043] Среда 105 вычислительных ресурсов буровой установки может содержать различные вычислительные ресурсы, используемые для контроля и управления операциями, такие как один или более компьютеров, содержащих процессор и запоминающее устройство. Например, устройство 104 координированного управления может содержать компьютер, содержащий процессор и запоминающее устройство для обработки данных датчиков, хранения данных датчиков и генерации управляющих команд в ответ на данные датчиков. Как указано ранее, устройство 104 координированного управления может управлять различными операциями различных систем буровой установки 102 посредством анализа данных датчиков от одной или более систем буровой установки (например, 110, 112, 114) для обеспечения возможности координированного управления между каждой системой буровой установки 102. Устройство 104 координированного управления может выполнять управляющие команды 150 для управления различными системами буровой установки 102 (например, системы 110, 112, 114 буровой установки). Устройство 104 координированного управления может направлять управляющие данные, определенные выполнением управляющих команд 150, одной или более системам буровой установки 102. Например, управляющие данные 152 могут быть отправлены к скважинной системе 110, управляющие данные 154 могут быть отправлены к системе 112 текучей среды, а управляющие данные 154 могут быть отправлены к центральной системе 114. Управляющие данные могут включать, например, команды оператора (например, включение или отключение насоса, включение или отключение клапана, обновление заданного значения физического свойства и т.д.). В некоторых вариантах реализации устройство 104 координированного управления может содержать быстродействующий управляющий контур, который непосредственно получает данные 140, 142 и 144 датчиков и выполняет, например, алгоритм управления. В некоторых вариантах реализации устройство 104 координированного управления может содержать медленнодействующий контур управления, который получает данные через среду 105 вычислительных ресурсов буровой установки для генерации управляющих команд.
[044] В некоторых вариантах реализации устройство 104 координированного управления может находиться между системой 107 диспетчерского управления и контроллерами 126, 132 и 138 систем 110, 112 и 114. Например, в таких вариантах реализации система 107 диспетчерского управления может быть использована для управления системами буровой установки 102. Система 107 диспетчерского управления может содержать, например, устройства для ввода управляющих команд для осуществления операций систем буровой установки 102. В некоторых вариантах реализации устройство 104 координированного управления может принимать команды от системы 107 диспетчерского управления, обрабатывать команды в соответствии с правилом (например, алгоритмом, основанным на законах физики для операций бурения), и/или управляющие процессы, полученные от среды 105 вычислительных ресурсов буровой установки, и предоставляет управляющие данные одной или более систем буровой установки 102. В некоторых вариантах реализации система 107 диспетчерского управления может быть предоставлена и/или управляема третьей стороной. В таких вариантах реализации устройство 104 координированного управления может координировать управление между системами дискретного диспетчерского управления и системами 110, 112 и 114, при этом используя управляющие команды, которые могут быть оптимизированы из данных датчиков, полученных от систем 110, 112 и 114, и анализированы посредством среды 105 вычислительных ресурсов буровой установки.
[045] Среда 105 вычислительных ресурсов буровой установки может содержать процесс 141 контроля, который может использовать данные датчиков для определения информации о буровой установке 102. Например, в некоторых вариантах реализации процесс 141 контроля может определять состояние процесса бурения, исправность оборудования, исправность системы, график технического обслуживания или любое их сочетание. В некоторых вариантах реализации среда 105 вычислительных ресурсов буровой установки может содержать управляющие процессы 143, которые могут использовать данные 146 датчиков для оптимизации бурильных операций, таких как, например, управление бурильным оборудованием для улучшения эффективности бурения, надежности оборудования и т.п. Например, в некоторых вариантах реализации полученные данные датчиков могут быть использованы для выведения схемы подавления помех для улучшения обработки сигналов электромагнитной и гидроимпульсной телеметрии. Управляющие процессы 143 могут быть осуществлены посредством, например, алгоритма управления, компьютерной программы, предустановленного программного обеспечения или другого подходящего аппаратного обеспечения и/или программного обеспечения. В некоторых вариантах реализации удаленная среда 106 вычислительных ресурсов может содержать управляющий процесс 145, который может быть предоставлен среде 105 вычислительных ресурсов буровой установки.
[046] Среда 105 вычислительных ресурсов буровой установки может содержать различные вычислительные ресурсы, такие как, например, один компьютер или несколько компьютеров. В некоторых вариантах реализации среда 105 вычислительных ресурсов буровой установки может содержать виртуальную компьютерную систему и виртуальную базу данных или другую виртуальную структуру для собранных данных. Виртуальная компьютерная система и виртуальная база данных могут содержать один или более интерфейсов ресурса (например, веб-интерфейсы), которые обеспечивают возможность осуществления вызовов через интерфейс прикладного программирования (API) к различным ресурсам посредством запроса. Дополнительно, каждый из ресурсов может содержать один или более интерфейсов ресурса, которые обеспечивают возможность доступа ресурсов друг к другу (например, для обеспечения возможности хранения данных виртуальной компьютерной системой среды вычислительных ресурсов в базе данных или другой структуре для собранных данных, или извлечения данных из нее).
[047] Виртуальная компьютерная система может содержать совокупность вычислительных ресурсов, выполненных с возможностью создания экземпляров виртуальных машин. Пользователь может взаимодействовать с виртуальной компьютерной системой посредством внеплощадочного пользовательского устройства или в некоторых вариантах реализации пользовательского устройства, расположенного на площадке. В некоторых вариантах реализации в среде 105 вычислительных ресурсов буровой установки могут быть использованы другие компьютерные системы или службы компьютерной системы, такие как компьютерная система или служба компьютерной системы, предоставляющая вычислительные ресурсы на специализированных или совместимых компьютерах/серверах и/или других физических устройствах. В некоторых вариантах реализации среда 105 вычислительных ресурсов буровой установки может содержать один сервер (в дискретном аппаратном компоненте или в качестве виртуального сервера) или несколько серверов (например, веб-серверы, серверы приложений или другие серверы). Серверы могут являться, например, компьютерами, расположенными в любой физической и/или виртуальной конфигурации.
[048] В некоторых вариантах реализации среда 105 вычислительных ресурсов буровой установки может содержать базу данных, которая может являться совокупностью вычислительных ресурсов, обрабатывающих одну или более совокупностей данных. Функционирование и управление такими совокупностями данных может быть осуществлено посредством применения вызовов через интерфейс прикладного программирования (API). Совокупности данных, таких как данные датчиков, может быть доступна для других ресурсов в среде вычислительных ресурсов буровой установки или для пользовательских устройств (например, пользовательского устройства 118, расположенного на площадке, и/или внеплощадочного пользовательского устройства 120), имеющих доступ к среде 105 вычислительных ресурсов буровой установки. В некоторых вариантах реализации удаленная среда 106 вычислительных ресурсов может содержать вычислительные ресурсы, подобные описанным ранее, такие как один компьютер или несколько компьютеров (в дискретных аппаратных компонентах или виртуальных компьютерных системах).
[049] В варианте реализации буровая установка может содержать плашки, расположенные на полу буровой установки. Плашки могут содержать датчики для фиксации перехода весовой нагрузки между вытяжным канатом (через верхний привод) и плашками. Дополнительно, при спускании труб в скважину, в определенный момент верхняя часть трубы может находиться в нескольких футах от верхней части буровой установки. Система может использовать датчик положения высокого разрешения для определения положений в мачте и крюка. Затем на крюк подают другую свечу трубы, присоединяют свечу на колонну труб, и затем крюк поднимает вес из плашек. Момент перехода веса может возникать при снятии веса с плашек и появлении его на крюке. Соответственно, высота крюка (и/или верхнего привода и т.д.) может быть зарегистрирована при удержании веса крюком посредством определения перехода, зарегистрированного в датчиках плашек (и/или датчиках верхнего привода). В результате может быть обеспечено точное измерение длина свечи в растянутом состоянии, например, при передаче веса бурильной колонны через нее.
Система измерения высоты
[050] На фиг. 3A показан схематический вид сбоку буровой установки 302, содержащей автоматическую систему 300 калибровки в соответствии с вариантом реализации. Буровая установка 302 в целом содержит талевый блок 304, подвешенный на кабеле или "буровом канате" 306, который может быть прикреплен к барабану 308 буровой лебедки 315 и выполнен с возможностью перемещения им. Буровая установка 302 может также содержать бурильное устройство 305, которое может являться ведущей трубой или верхним приводом, или содержать его. Бурильное устройство 305 может поддерживаться (например, быть подвешено) талевым блоком 304, и может быть выполнено с возможностью вращения сегмента трубы, такого как бурильная колонна 307 (например, одна или более бурильных труб) с целью бурения ствола скважины в земле. Буровая установка 302 может также содержать кронблок 309, расположенный сверху буровой установки 302, и структурный компонент 311, который может являться частью, например, вышки буровой установки 302.
[051] Буровая лебедка 315 может содержать "основное" устройство измерения высоты, такое как кодирующее устройство 313. Кодирующее устройство 313 может быть выполнено с возможностью измерения вращения в барабане 308, из которого может быть вычислена высота бурильного устройства 305. В свою очередь, глубина бурильной колонны 307 может быть определена путем отслеживания количества "прохождения" бурового каната 306 через кодирующее устройство 313 при нахождении бурильного устройства 305 в соединении с бурильной колонной. Однако кодирующее устройство 313 (или другое устройство устройства измерения высоты) может не учитывать растяжение бурового каната 306 и другие потенциальные динамические погрешности в вычислении глубины на основании вращения барабана 308.
[052] Система 300 может содержать калибровочный датчик 314, выполненный с возможностью перемещения с бурильным устройством 305. В варианте реализации датчик 314 может быть установлен в или на бурильное устройство 305, как показано, а в других он может быть прикреплен к талевому блоку 304 или в другое место (например, "присоединен" к бурильному устройству 305). Система 300 может дополнительно содержать множество маркеров высоты (показано пять:310(1), 310(2), 310(3), 310(4), 310(5)), которые могут быть установлены на структурный компонент 311 и могут являться неподвижными относительно структурного компонента 311. Например, один или более маркеров 310(1)-(3) могут быть установлены рядом с верхней частью буровой установки 302, например, рядом с верхней границей амплитуды движения бурильного устройства 305, а один или более маркеров 310(4)-(5) могут быть установлены рядом с полом 312 буровой установки 302, например, рядом с нижней границей амплитуды движения бурильного устройства 305. Еще один или более маркеров могут быть установлены на буровой установке вдоль амплитуды перемещения верхнего привода. В других вариантах реализации маркеры 310(1)-(5) могут быть расположены вдоль амплитуды вертикального движения бурильного устройства 305 более равномерно.
[053] Высота маркеров 310(1)-(5) высоты может быть задана заранее. Например, высота может быть измерена от фиксированной эталонной точки, например вертикальное расстояние от пола 312 буровой установки. В другом варианте реализации высота может являться относительной, например, вертикальное расстояние между двумя из маркеров 310(1)-(5).
[054] Каждый из маркеров 310(1)-(5) высоты может содержать уникальный (среди маркеров 310(1)-(5)) идентификатор, такой как A, B, C и т.д., хотя для таких идентификаторов может быть использован любой подходящий формат. Идентификатор может быть связан с высотой маркеров 310(1)-(5), например, в базе данных. В некоторых вариантах реализации маркеры 310(1)-(5) высоты могут являться пассивными визуальными индикаторами. В других вариантах реализации маркеры 310(1)-(5) высоты могут являться приемопередающим устройством, выполненным с возможностью испускания сигнала, выражающего идентификатор, или содержать его.
[055] Датчик 314 может распознавать и различать маркеры 310(1)-(5) высоты. Например, датчик 314 может распознавать визуальную отличительную черту маркеров 310(1)-(5) высоты, и таким образом определять, какой из маркеров 310(1)-(5) рассматривает датчик 314, например, при горизонтальном выравнивании с ним. Датчик 314 может также являться приемопередающим устройством, принимающим сигнал, испускаемый от маркеров 310(1)-(5) при горизонтальном выравнивании датчика 314 с определенным маркером 310(1)-(5). Например, датчик 314 может являться оптическим датчиком, а маркеры 310(1)-(5) высоты могут содержать лазерные источники, излучающие лучи света с частотами, отличающимися друг от друга. В других вариантах реализации датчик 314 может являться считывателем меток радиочастотной идентификации (RFID), а маркеры 310(1)-(5) могут являться метками радиочастотной идентификации (RFID). В других вариантах реализации маркеры 310(1)-(5) могут являться устройствами, излучающими звук, или маркером любого другого типа.
[056] На фиг. 3B показан схематический вид сбоку еще одного варианта реализации автоматической системы 300. В этом варианте реализации вместо того, чтобы основывать измерение высоты на выравнивании с вертикальными маркерами, система 300 содержит маркеры 320(1) и 320(2), расположенные на одинаковой друг с другом высоте, например, на полу 312 буровой установки или рядом с ним. Датчик 314 может быть расположен на блоке 304 в варианте реализации, как показано, но в другом варианте реализации может быть расположен на бурильном устройстве 305 (фиг. 3A) или в другом месте на структуре, перемещаемой вертикально посредством движения барабана 308.
[057] Маркеры 320(1), 320(2) могут быть активными и выполненными с возможностью определения расстояния до датчиков 314. В другом варианте реализации маркеры 320(1), 320(2) могут быть выполнены с возможностью измерения углового положения датчика 314, а именно, углов  . Следовательно, маркеры 320(1), 320(2) могут считаться приемопередающими устройствами. В других вариантах реализации маркеры 320(1), 320(2) могут быть пассивными, отражательными и т.д. Сочетание датчика 314 и маркеров 320(1), 320(2) может обеспечивать возможность определения расстояния или определения углового положения между ними, например, с использованием ультразвука, лазерного луча, камеры, радара или любого другого подходящего способа определения расстояния по прямой линии между двумя точками.
. Следовательно, маркеры 320(1), 320(2) могут считаться приемопередающими устройствами. В других вариантах реализации маркеры 320(1), 320(2) могут быть пассивными, отражательными и т.д. Сочетание датчика 314 и маркеров 320(1), 320(2) может обеспечивать возможность определения расстояния или определения углового положения между ними, например, с использованием ультразвука, лазерного луча, камеры, радара или любого другого подходящего способа определения расстояния по прямой линии между двумя точками.
[058] Также, датчик 314 может быть расположен на точке A, а маркеры 320(1), 320(2) могут быть расположены на точках B и C, соответственно. Центр скважины обозначен O. Расстояние вдоль линии BC может являться неизменным, так как маркеры 320(1), 320(2) могут быть неподвижны относительно структурного компонента 311 буровой установки. Расстояние вдоль линии AB может изменяться, аналогично расстоянию вдоль линии AC, т.е. между датчиком 314 и маркерами 320(1), 320(2), например, при подъеме или опускании блока 304. Таким образом, расстояния AB и BC могут быть измерены с использованием сочетания датчика 314 и маркеров 320(1), 320(2). То есть расстояние AO может быть вычислено на основании метода триангуляции следующим образом:
 (1)
(1)
[059] Хотя маркеры 320(1), 320(2) изображены на полу 312 буровой установки, и, следовательно, выполнены с возможностью измерения расстояния от пола 312 буровой установки до блока 304, маркеры 320(1), 320(2) могут быть расположены на любом участке под блоком 304, а изменение в вычислении будет заключаться только в добавлении смещения, равного высоте над полом 312 буровой установки. Также, маркеры 320(1), (2) могут быть также расположены над блоком 304, и могут быть использованы для измерения расстояния талевого блока 304 от кронблока 309, или любой другой структуры над блоком 304 (и/или бурильным устройством 305, в зависимости от расположения калибровочного датчика 314). Подобное выражение расстояния AO может быть определено на основании измерений углового положения, учитывая известное расстояние между маркерами 320(1), 320(2).
[060] В некоторых вариантах реализации может быть использовано больше чем два маркера 320(1), 320(2). Например, может быть предоставлен третий маркер. Датчик 314 может обнаруживать третий маркер в дополнение к первому и второму маркерам 320(1), 320(2), и может быть определено качество сигнала первого, второго и третьего маркеров. Датчик 314 (или контроллер) затем может выбирать использование измерений, осуществленных относительно первого и второго маркеров 320(1), 320(2), вместо измерений, осуществленных относительно третьего маркера, на основании качества сигнала (например, выбирать два сигнала более высокого качества).
[061] Кроме того, маркеры 320(1), 320(2) могут быть расположены на различной высоте. Например, на фиг. 3С показан схематический вид сбоку такого варианта реализации системы 300. Вариант реализации, представленный на фиг. 3С, может быть подобным варианту, указанному на фиг. 3B, поскольку маркеры 320(1), 320(2) используются для расчета высоты блока 304 (или бурильного устройства 305, см. фиг. 3A) над полом 312 буровой установки методом триангуляции. Однако вместо размещения обоих маркеров 320(1), 320(2) на полу 312 буровой установки, один маркер 320(2) может быть размещен на проходящем в вертикальном направлении участке структурного компонента 311 буровой установки, как показано, на отличающейся (например, большей) высоте от маркера 320(1).
[062] Эталонная точка E может быть выбрана на полу 312 буровой установки или на другом участке, имеющем такую же высоту от пола 312 буровой установки, как и маркер 320(1). Поскольку точки B, C и E являются неподвижными, длина линий BE, BC и CE известна. Также, известен угол y между линиями BC и CE. Следовательно, угол x между линиями AC и BC может быть определен следующим образом:
 (2)
(2)
[063] Таким образом, длина линии AE может быть рассчитана следующим образом:
 (3)
(3)
[064] При известной длине линии AE, вычисление является подобным описанному ранее относительно фиг. 3A, и длина AE может быть использована в уравнении 1 вместо AC для решения AO, которая является высотой блока 304 (или бурильного устройства 305). Специалист в данной области техники на основании настоящего описания сможет реализовать множество различных способов осуществления указанной триангуляции с использованием системы 300, содержащей калибровочный датчик 314 и маркеры 320(1), 320(2), и, таким образом, следует понимать, что указанные ранее положения маркеров 320(1), 320(2) и основанные на них вычисления являются только примерами такой триангуляции.
[065] Метод триангуляции, описанный на фиг. 3B и 3C, может быть использован для калибровки основной системы измерения глубины, описанной далее. В некоторых вариантах реализации такая триангуляция на основе маркеров 320(1), 320(2) может быть использована в качестве основной системы измерения глубины. Так как измерения расстояния между датчиком 314 и маркерами 320(1), 320(2), и/или угловым положением датчика 314 относительно маркеров 320(1), 320(2) могут осуществляться непрерывно, то таким образом высота AO может определяться непрерывно во время перемещения блока 304. Таким образом, кодирующее устройство 313 может быть использовано в качестве резервной или вспомогательной системы измерения глубины. Используемый в настоящем документе термин «непрерывный» означает режим, при котором измерения осуществляют с определенной периодичностью или частотой, предусматривающей короткий интервал между ними, например, в процессе бурения.
Калибровка измерения глубины бурения с использованием системы измерения высоты
[066] В процессе эксплуатации вычисление длины бурильной колонны 307 на основании вращения, измеренного кодирующим устройством 313, может оказаться неточным. Например, буровой канат 306 может быть подвержен растяжению с течением времени. Также, неточность вычисления может быть обусловлена другими факторами. То есть определенное угловое движение барабана 308 может перемещать бурильное устройство 305 на одну высоту за один раз, и одинаковое угловое движение барабана 308 может приводить к отличающемуся изменению высоты в другое время.
[067] Соответственно, на фиг. 4A показана блок-схема способа 400 калибровки измерения глубины бурения в соответствии с вариантом реализации. Способ 400 может быть использован в эксплуатации системы 300 и, следовательно, описан в настоящем документе со ссылкой на нее; однако следует понимать, что в некоторых вариантах реализации способ 400 может быть использован в эксплуатации других систем.
[068] На фиг. 4B показан график 450 соотношения измеренной глубины и действительной глубины в соответствии с иллюстративным примером. График 450 в частности иллюстрирует соотношение между измерениями, осуществленными некалиброванным устройством измерения высоты (линия 452) и калиброванным устройством (линия 458). Некалиброванное устройство может функционировать на основании предположения, что измеренная глубина равна действительной глубине, как между двумя известными значениями глубины (например, начало свечи или соединения при спуске и ее конец). В калиброванном устройстве могут учитываться изменения такой линии 452.
[069] В целом, способ 400 может включать определение разности измеренной глубины между первым положением калибровочного датчика и вторым положением калибровочного датчика на основании измерений, осуществленных устройством измерения высоты. Также, способ 400 может включать определение разности измеренной глубины между первым и вторым положениями на основании измерений, осуществленных калибровочным датчиком с использованием одного или более маркеров. Способ 400 может также включать калибровку устройства измерения высоты по меньшей мере частично на основании соотношения между разностью измеренной глубины и разностью калибровочной глубины.
[070] Со ссылкой на вариант реализации, конкретно изображенный на фиг. 4A, а также со ссылкой на фиг. 4B, способ 400 может начинаться с определения первой измеренной глубины с использованием устройства измерения высоты (например, кодирующего устройства 313) при нахождении калибровочного датчика 314 в первом положении, как указано на этапе 402. Это может быть осуществлено в любое время в процессе спуска/выполнения операций с сегментом труб. Например, в варианте реализации по фиг. 3A это может быть осуществлено при считывании калибровочным датчиком 314 первого маркера высоты, который может являться любым маркером 310(1)-(5) высоты, например, маркер 310(5) высоты. Устройство измерения высоты может осуществлять эту операцию путем измерения углового смещения барабана 308, которое может быть преобразовано в измеренную глубину.
[071] Способ 400 может также включать определение первой калибровочной глубины на основании измерения, осуществленного калибровочного датчика 314 с использованием одного или более маркеров 310(1)-(5) и/или 320(1), 320(2), как указано на этапе 404. В варианте реализации, таком как указанный на фиг. 3A, калибровочный датчик 314 может осуществить эту операцию посредством определения высоты маркера 310(5) высоты. В конкретном варианте реализации калибровочный датчик 314 может получить идентификатор от маркера 310(5) высоты и определить высоту маркера 310(5) высоты путем обращения к базе данных, в которой хранятся данные о его высоте, связанные с идентификатором. В вариантах реализации, включающих применение триангуляции, по фиг. 3B и 3C калибровочный датчик 314 может непосредственно определить свою высоту путем триангуляции с использованием маркеров 320(1), (2).На фиг. 4B первое измерение калибровочной глубины, осуществленное калибровочным датчиком 314, обозначено позицией 454.
[072] Способ 400 может также включать перемещение калибровочного датчика 314, например, путем перемещения талевого блока 304 и/или бурильного устройства 305, как указано на этапе 406. Такое перемещение блока 304 и/или бурильного устройства 305 может быть реализовано с использованием буровой лебедки 315 (например, путем вращения барабана 308), и, соответственно, устройство измерения высоты может по меньшей мере частично зарегистрировать указанное изменение.
[073] Далее, способ 400 может включать определение второй измеренной глубины на основании измерения, осуществленного устройством измерения высоты при нахождении калибровочного датчика во втором положении, как указано на этапе 408. Это может быть осуществлено в любое время в процессе спуска сегмента трубы после перемещения калибровочного датчика 314 из первого положения на этапе 404. Например, в варианте реализации по фиг. 3A это моет быть осуществлено при считывании калибровочным датчиком 314 второго маркера высоты, который может являться любым маркером 310(1)-(5) высоты, например, маркером 310(4) высоты, который в вертикальном направлении примыкает к маркеру 310(5) высоты. Устройство измерения высоты может выполнить эту операцию путем регистрации углового смещения барабана 308.
[074] Далее, способ 400 может продолжаться определением второй калибровочной глубины на основании измерения, осуществленного калибровочным датчиком 314 с использованием одного или более маркеров 310(1)-(5) и/или маркеров 320(1), (2), как указано на этапе 410. Например, калибровочный датчик 314 может определить высоту маркера 310(4) высоты посредством получения идентификатора и обращения к базе данных, в которой идентификатор связан с заданной высотой. В вариантах реализации, включающих применение триангуляции, по фиг. 3B и 3C калибровочный датчик 314 может непосредственно определять свою высоту посредством триангуляции.
[075] Второе измерение калибровочной глубины обозначено позицией 462 на фиг. 4B.Как показано, второе измерение 462 глубины может отклоняться от глубины, измеренной некалиброванным устройством, представленной линией 452.
[076] Также, способ 400 может включать определение разности измеренной глубины между первым и вторым положениями на основании первого и второго измеренных значений глубины, полученных устройством измерения высоты, как указано на этапе 412. Способ 400 может дополнительно включать определение разности калибровочных значений глубины между первым и вторым положениями, как указано на этапе 414. Эта операция может основываться на измерениях глубины, осуществленных калибровочным датчиком 314 с использованием любого одного или более датчиков 310(1)-(5) или 320(1), (2).
[077] Так как структурный компонент 311 буровой установки может в общем являться неподвижным (например, по сравнению с вращающимся барабаном 308, буровым канатом 306 и т.д.), расстояние между смежными маркерами 310(4) и 310(5) высоты и/или положением маркеров 320(1), 320(2) триангуляции может оставаться относительно неизменным. Однако разность значений глубины, полученных устройством измерения высоты (например, кодирующим устройством 313 на барабане 308 буровой лебедки 315), может обладать предрасположенностью к погрешности и, следовательно, может подвергаться калибровке с использованием калибровочной глубины.
[078] То есть разность измеренных значений глубины, определенная на этапе 412, может быть сопоставлена с разностью калибровочных значений глубины, определенной на этапе 414, для корректировки устройства измерения высоты, если это необходимо, как указано на этапе 416. Например, угловое смещение барабана 308 при перемещении бурильного устройства 305 из первого положения во второе положение может быть сопоставлено с разностью значений калибровочной глубины, с целью определения соотношения этих двух значений. Таким образом, например, способ 400 может включать калибровку устройства измерения высоты на основании сравнения на этап 416, как указано на этапе 418. Этот процесс может быть повторен, например, для одного, некоторых или всех других маркеров 310(3), 310(2), 310(1) высоты, или подобным образом в множестве отдельных моментов времени, интервалов, на усмотрение пользователя и т.д. (например, в варианте реализации, включающем применение триангуляции), например, как указано на фиг. 4B для позиций 464, 466 и 468, соответственно. Таким образом, более высокое разрешение, обусловленное калибровкой, может обеспечивать возможность интерполяции точного положения во время спуска бурильной колонны.
[079] В конкретном примере тактовый генератор получения данных датчика 314 может быть синхронизирован с тактовым генератором буровой лебедки 315. Например, при нахождении в двух положениях абсолютная разность высот составляет  , а соответствующая разность считываний кодирующего устройства буровой лебедки между двумя высотными отметками составляет
, а соответствующая разность считываний кодирующего устройства буровой лебедки между двумя высотными отметками составляет  . Соответственно, коэффициент ζ калибровки может быть представлен в виде:
. Соответственно, коэффициент ζ калибровки может быть представлен в виде:
 (4)
(4)
[080] Данный коэффициент ζ калибровки может быть использован для калибровки измеренных значений глубины, полученных устройством измерения высоты (например, кодирующим устройством 313 на барабане 308). Например, измеренное значение высоты может быть умножено на коэффициент калибровки. Во время следующей возможности осуществления калибровки, выполненной по усмотрению оператора или в любой момент времени, когда бурильное устройство 305 и/или талевый блок 304 проходит возле следующих маркеров 310(1)-(5) высоты, может быть вычислен другой коэффициент калибровки. То есть калибровка может выполняться автоматически. В некоторых вариантах реализации любые два смежных маркера высоты могут предоставлять новый коэффициент калибровки.
[081] На фиг. 5 показана другая система 500 калибровки в соответствии с вариантом реализации. Система 500 может также содержать множество маркеров 502 высоты, которые могут быть установлены на структурный компонент 311 буровой установки. Маркеры 502 могут быть связаны с высотой над полом 312 буровой установки.
[082] В этом варианте реализации калибровочный датчик 314 (фиг. 3) может быть предоставлен камерой 504, которая может быть установлена на талевом блоке 304 и/или бурильном устройстве 305. При попадании конкретного маркера 502 в поле зрения камеры 504, камера 504 может считывать маркер 502. Контроллер, сопряженный с камерой 504 или выполненный цельно с ней, может различать маркеры 502 по признаку или индикатору, который является уникальным для отдельных маркеров 502, такому как буква, цвет, штрих-код или подобное. В другом варианте реализации контроллер может выполнять подсчет количества пройденных маркеров 502, например, без различения отдельных маркеров 502, при этом маркеры 502 расположены через одинаковые интервалы. Путем сопоставления показаний камеры 504 с соответствующей высотой маркера может быть определена глубина расположения блока. Таким образом, управление разрешением измерения глубины может быть осуществлено разрешением маркеров 502. Кроме того, любое считывание высоты двумя смежными маркерами 310(1)-(5) может быть использовано для калибровки устройства измерения высоты для измерения глубины рядом с этими двумя смежными маркерами.
[083] На фиг. 6 показан схематический вид буровой установки 302 с другим вариантом реализации системы 300 калибровки в соответствии с вариантом реализации. Как показано, элемент 602 буровой установки может быть предоставлен как часть буровой установки 302. Элемент 602 буровой установки может выполнять другую функцию как часть буровой установки 302, однако в других вариантах реализации он может не выполнять другие функции. Элемент 602 буровой установки может иметь отличительный признак, который может считываться камерой 604, и в данном случае выполняющей функцию датчика 314 (фиг. 3). В конкретном варианте реализации элемент 602 буровой установки может представлять собой прямоугольную конструкцию определенного цвета, установленную на структурный компонент 311 буровой установки, например, под кронблоком 309.
[084] Камера 604 может быть установлена над талевым блоком 304. Камера 604 может сформировать изображение элемента 602 буровой установки и может определить расстояние до него на основании размеров элемента 602 буровой установки. При использовании данного способа высота камеры 604 и, следовательно, блока 304 и/или бурильного устройства 305 может определяться, например, непрерывно, и использоваться подобно варианту реализации, включающему применение метода триангуляции, описанному ранее со ссылкой на фиг. 3B и 3C.
Контроль перемещения труб
[085] На фиг. 7 показан схематический вид сбоку буровой установки 302, содержащей систему 700 контроля перемещения труб в соответствии с вариантом реализации. В этом варианте реализации камера 702 может быть установлена рядом с бурильной колонной 307, например, ниже пола 312 буровой установки. Бурильная колонна 307 может проходить через противовыбросовый превентор (BOP) 703, расположенный под полом 312 буровой установки, и в скважину 704 под противовыбросовым превентором 703. В результате непрерывного формирования изображений бурильной трубы во время спускоподъемных операций и/или вращения, и использования алгоритма распознавания образов для отслеживания уникальных признаков, содержащихся в каждом изображении, могут быть определены параметры перемещения (скорость вращения и/или поступательного движения) бурильной трубы. Интегрирование этих значений скорости в зависимости от времени может обеспечивать возможность вычисления угла поворота и расстояния перемещения (глубины) бурильной трубы.
Повышение точности измерения глубины бурения
[086] При добавлении новой свечи к бурильной колонне, и при убирании плашек, вес бурильной колонны переносится с плашек на верхний привод/буровой канат, обуславливая растяжение бурового каната. В зависимости от веса бурильной колонны это растяжение может составлять несколько сантиметров (или более), однако оно не может быть измерено устройством измерения высоты (т.е. кодирующим устройством на буровой лебедке), так как растяжение бурового каната не приводит к вращению барабана буровой лебедки.
[087] Соответственно, на фиг. 8 показана блок-схема способа 800 бурения ствола скважины и учтена длина бурового каната при растяжении в соответствии с вариантом реализации. На фиг. 9 и 10 показаны схематические виды сбоку буровой установки 900 на двух стадиях выполнения способа 800 в соответствии с вариантом реализации. Буровая установка 900 может быть в общем подобной буровой установке 302. Буровая установка 900 может содержать плашки 902, которые могут быть расположены на полу 312 буровой установки или рядом с ним. Плашки 902 могут охватывать бурильную колонну 307, проходящую через них, и могут быть выполнены с возможностью поддержания веса бурильной колонны 307, например, при добавлении или удалении новой свечи труб 904.
[088] Плашки 902 могут содержать датчик 906 плашек (например, тензометрический датчик), который может быть выполнен с возможностью определения, когда плашки 902 поддерживают вес бурильной колонны 307 и, дополнительно, может обеспечивать возможность измерения и передачи сигнала, представляющего величину нагрузки, воздействующей на них (например, вес WS, воздействующий на плашки). Подобным образом, буровая установка 900 может также содержать датчик 908 нагрузки, например, прикрепленный к буровому канату 306 (или бурильному устройству 305, барабану 308, см. фиг. 3, или установленный в любом другом подходящем месте), для измерения веса бурильной колонны 307, подвешенной посредством бурильного устройства 305. В конкретном проиллюстрированном варианте реализации измеренной нагрузкой подвешенного груза может являться нагрузка WH на крюк; однако другие нагрузки могут быть измерены на участках, отличающихся от крюка, и использованы в соответствии со способом 800.
[089] Способ 800 может начинаться этапом размещения бурильного устройства 305 над бурильной колонной 307 на высоте h1, при этом бурильная колонна 307 опирается на плашки 902, как указано на этапе 802 (например, вес WS, воздействующий на плашки=вес WT бурильной колонны; вес WH подвешенного груза=0). Далее, свеча труб 904 (например, сегмент труб, содержащий одно или более соединений труб, например, бурильных труб) может быть соединена с бурильной колонной 307 и бурильным устройством 305, как указано на этапе 804 и как показано на фиг. 9.
[090] После этого плашки 902 могут быть выведены из взаимодействия с бурильной колонной 307. Отведение плашек 902 может преобразовать вес бурильной колонны WT в вес WS подвешенного груза, что может привести к растяжению бурового каната 306 и, таким образом, нахождению бурильного устройства 305 на меньшей высоте h2, как показано на фиг. 10. Кодирующее устройство 313 не может регистрировать это изменение высоты.
[091] В некоторых вариантах реализации способ 800 может также включать перемещение бурильного устройства 305 из первого положения во второе положение при помощи буровой лебедки 315, как указано на этапе 806. Например, бурильное устройство 305 может быть поднято посредством наматывания бурового каната 306 на барабан 308 или опущено в результате сматывания бурового каната 306 с барабана 308. Однако в некоторых вариантах реализации способ 800 может не включать перемещение бурильного устройства 305, а второе положение может быть исходным положением бурильного устройства 305.
[092] Перед перемещением или после перемещения бурильного устройства 305 способ 800 может включать определение измеренной высоты бурильного устройства 305 во втором положении с использованием основного устройства измерения высоты (например, кодирующего устройства 313), как указано на этапе 808. Измеренная высота может быть определена на основании углового смещения барабана 308 (которое может быть откорректировано с поправкой на увеличенный диаметр слоя на диаметре барабана 308 вследствие намотки бурового каната 306) и известной эталонной высоты.
[093] Способ 800 может также включать определение зарегистрированной высоты во втором положении с использованием датчика, как указано на этапе 810. Это определение может быть осуществлено с использованием любого из указанных ранее датчиков, например, датчиков, перемещаемых с бурильным устройством 305, талевым блоком 304, или обоими из них в результате функционирования буровой лебедки 315. То есть датчик может, например, использовать маркеры для определения действительной высоты бурильного устройства (например, бурильного устройства 305), талевого блока или обоих из них от эталонной плоскости, такой как пол 312 буровой установки.
[094] Способ 800 может также включать определение показателя деформации на основании разности между измеренной высотой и зарегистрированной высотой, как указано на этапе 812. Измеренная высота, определенная кодирующим устройством 313, может иметь погрешность, обусловленную растяжением бурового каната 306 под воздействием увеличенного веса, подвешенного на нем, который обусловлен выходом бурильной колонны 307 из взаимодействия с плашками. Такое растяжение не может быть зарегистрировано кодирующим устройством 313, так как это может привести к изменению высоты без вращения барабана 308. Показатель деформации может представлять собой величину растяжения (например, длину растяжения) бурового каната 306. В другом варианте реализации вместо этого может быть измерено напряжение, натяжение или обе эти характеристики. Далее, в некоторых вариантах реализации напряжение или натяжение может использоваться для определения растяжения, например, с учетом общей длины бурового каната 306. Однако использование натяжения может обеспечить возможность определения растяжения на единицу длины и, таким образом, пока вес бурильной колонны 307 остается постоянным, натяжение в любом положении (например, первом положении) бурильного устройства 305 может быть вычислено, несмотря на изменение длины бурильной колонны 316, при ее наматывании на барабан 308 или сматывании с него.
[095] Показатель деформации может использоваться для корректировки основного устройства измерения высоты, как указано на этапе 814. Например, если в качестве показателя деформации используется растяжение, то величина растяжения может быть вычтена из измеренного значения высоты, зарегистрированного основным устройством измерения высоты (кодирующим устройством 313).
[096] В некоторых вариантах реализации эта процедура может быть повторена для другого положения (например, первого положения), что может обеспечить получение двух точек данных для показателя деформации (например, растяжения) бурового каната 306, и, соответственно, показатель деформации может быть основан на разности между измеренным и зарегистрированным значениями высоты в обоих положениях. Далее, это может обеспечивать возможность интерполяции показателя деформации в пределах по меньшей мере части (например, всего) диапазона перемещения бурильного устройства 305 или талевого блока 304.
Определение расстояния между буровым долотом и забоем скважины
[097] На фиг. 11 показана блок-схема способа 1100 бурения, включающего определение расстояния между буровым долотом и забоем ствола скважины в соответствии с вариантом реализации. Способ 1100 может использовать буровую установку 900 или другую буровую установку, выполненную с возможностью регистрации положения (например, высоты) бурильного устройства 305, блока 304 или другого устройства, предназначенного для выполнения операций с трубами. На фиг. 12 показан другой схематический вид буровой установки 900, иллюстрирующий спуск бурильной колонны 307 в ствол 1200 скважины в соответствии с вариантом реализации. В частности, на фиг. 12 показана компоновка 1202 низа бурильной колонны, содержащая буровое долото 1204 и забой 1206 ствола 1200 скважины. Буровое долото 1204 может взаимодействовать с забоем 1206 ствола 1200 скважины для осуществления бурения земли и углубления ствола 1200 скважины.
[098] В общем, в процессе бурения длина бурильной колонны 307 может изменяться, и это может влиять на возможность определения бурильщиком расстояния между буровым долотом 1204 и забоем 1206 ствола 1200 скважины, например, в случае добавления новой свечи труб 904 к бурильной колонне 307. Например, буровая установка 900 может использоваться для определения расстояния между буровым долотом 1204 и забоем 1206, например, с использованием одного или более описанных ранее вариантов реализации, таких как калибровка или непосредственное измерение посредством применения метода триангуляции (датчик 314 показан на фиг. 12 в качестве примера).
[099] Способ 1100 может начинаться, например, в конце спуска свечи труб бурильной колонны 307 в скважину, например, при взаимодействии бурового долота 1204 с забоем 1206 ствола 1200 скважины. На этом этапе способ 1100 может включать определение первой наземной нагрузки Wd (а именно, нагрузки, такой как нагрузка на крюк, измеренная на бурильном устройстве или на креплении неподвижного конца бурового каната) бурильной колонны 307, как указано на этапе 1102. Первая наземная нагрузка Wd может являться нагрузкой на крюк и, следовательно, может быть измерена с использованием крепления неподвижного конца бурового каната, тензометрического датчика в бурильном устройстве 305 и т.д.
[0100] Глубина Dh ствола скважины («глубина скважины») может быть представлена длиной бурильной колонны 307. Длина бурильной колонны 307 может учитывать растяжение и/или сжатие бурильной колонны 307 во время эксплуатации. Например, допустим, что L является длиной бурильной колонны 307 под бурильным устройством 305 при отсутствии осевой нагрузки. В процессе бурения действительная длина Ld бурильной колонны под бурильным устройством 305 может быть выражена следующим образом:
 (5)
(5)
где:  - изменение длины бурильной колонны вследствие воздействия ее веса и скважинного давления;
- изменение длины бурильной колонны вследствие воздействия ее веса и скважинного давления;  - изменение длины бурильной колонны вследствие воздействия температуры;
- изменение длины бурильной колонны вследствие воздействия температуры;  - изменение длины бурильной колонны, обусловленное силой трения между бурильной колонны и стволом скважины,
- изменение длины бурильной колонны, обусловленное силой трения между бурильной колонны и стволом скважины,  - изменение длины бурильной колонны, обусловленное нагрузкой на долото, и
- изменение длины бурильной колонны, обусловленное нагрузкой на долото, и  - длина бурильной колонны 307 между полом 312 буровой установки и бурильным устройством 305.
- длина бурильной колонны 307 между полом 312 буровой установки и бурильным устройством 305.
[0101] Во время подъема из скважины длина Lo бурильной колонны 307 под полом 312 буровой установки может быть выражена следующим образом:
 (6)
(6)
[0102] Таким образом, глубина скважины Dh может быть выражена следующим образом (примечание:  - расстояние между бурильным устройством и полом буровой установки):
- расстояние между бурильным устройством и полом буровой установки):
 (7)
(7)
[0103] Далее, долото 1204 может быть поднято с забоя 1206 ствола 1200 скважины, например, путем поднятия бурильного устройства 305 на расстояние s, как указано на этапе 1104. Расстояние s может быть измерено, как указано на этапе 1106, например, с использованием кодирующего устройства 313 буровой лебедки 315 и/или любого из вариантов реализации измерения высоты, включая методы калибровки и триангуляции, с использованием одного или более датчиков 314, 504, как описано ранее. После поднятия долота 1204 с забоя 1206, плашки 902 могут быть зажаты, например, посредством взаимодействия их зубцов с бурильной колонной 307, для фиксации и поддержки бурильной колонны 307, как указано на этапе 1108.
[0104] После получения данных измерения расстояния s, может быть установлено следующее соотношение:
 (8)
(8)
[0105] Если s >  , то глубина Db долота может быть выражена следующим образом:
, то глубина Db долота может быть выражена следующим образом:
 (9)
(9)
[0106] Расстояние между долотом и забоем скважины ΔDb может быть выражено следующим образом:
 (10)
(10)
[0107] Далее, способ 1100 может продолжаться присоединением новой свечи труб 904 к бурильному устройству 305 и бурильной колонне 307, поддерживаемой в плашках 902, как указано на этапе 1110. После присоединения новой трубы 907 на этапе 1110 плашки 902 могут быть отведены, а бурильное устройство 305 может поддерживать бурильную колонну 307, как указано на этапе 1112.
[0108] Далее, способ 1100 может включать измерение второй наземной нагрузки Wt (еще одно измерение нагрузки, например, нагрузки на крюк, измеренной на бурильном устройстве или на креплении неподвижного конца бурового каната или рядом с ним) бурильной колонны 307 с новой свечой труб 904, перед спуском бурового долота во взаимодействие с забоем ствола скважины, как указано на этапе 1114. Соотношение между первой наземной нагрузкой Wd и второй наземной нагрузкой Wt определяет нагрузку на долото WOB, которая может быть определена на этапе 1116. Нагрузка на долото WOB может быть выражена следующим образом (примечание: Ws - вес свечи, добавленной к бурильной колонне на поверхности):
WOB=Wd - (Wt - Ws) (11)
[0109] Далее, способ 1100 может включать определение расстояния t, на которое следует опустить бурильное устройство 305, чтобы буровое долото 1204 было введено во взаимодействие с забоем 1206 ствола 1200 скважины, на основании расстояния s, на которое было поднято бурильное устройство 305, и нагрузки на долото (WOB), как указано на этапе 1118. Расстояние t может быть выражено следующим образом:
 (12)
(12)
Подставив уравнение 10 в уравнение 12, получим:
 (13)
(13)
[0110]
 может быть определено следующим образом:
может быть определено следующим образом:
 (14)
(14)
где: E - модуль упругости; A - площадь поперечного сечения бурильной колонны, а <1/A> представляет среднее значение величины, обратной площади поперечного сечения бурильной колонны. Таким образом, расстояние, на которое необходимо переместить бурильное устройство 305 до достижения буровым долотом 1204 забоя 1206 ствола 1200 скважины, может быть выражено следующим образом:
 (15)
(15)
[0111] Поскольку расстояние s и нагрузка на долото WOB могут быть известными из указанных ранее измерений и вычислений, размеры и модуль упругости бурильной колонны 307 также могут быть известны, можно легко вычислить расстояние t. Далее, способ 1100 может продолжаться спуском бурильного устройства 305 на расстояние t, чтобы буровое долото 1204 было введено во взаимодействие с забоем 1206 ствола 1200 скважины, для продолжения бурения, как указано на этапе 1120. Взаимодействие может контролироваться таким образом, чтобы исключить столкновение бурового долота 1204 с забоем 1206 на высокой скорости, поскольку расстояние, на которое следует опустить бурильное устройство 305, было определено.
[0112] В некоторых вариантах реализации способы, описанные в настоящем документе, могут осуществляться вычислительной системой. На фиг. 13 показан пример такой вычислительной системы 1300 в соответствии с некоторыми вариантами реализации. Вычислительная система 1300 может содержать компьютер или компьютерную систему 1301A, которая может являться отдельной компьютерной системой 1301A или конфигурацией распределенных компьютерных систем. Компьютерная система 1301A содержит один или более модулей 1302 анализа, выполненных с возможностью осуществления различных задач в соответствии с некоторыми вариантами реализации, таких как один или более способов, описанных в настоящем документе. Для выполнения указанных различных задач модуль 1302 анализа осуществляет операции независимо или в координации с одним или более процессоров 1304, который (которые) соединен с одним или более носителями данных 1306. Процессор (процессоры) 1304 также соединен с сетевым интерфейсом 1307, обеспечивающим возможность обмена данными между компьютерной системой 1301A и одним или более дополнительными компьютерными системами и/или вычислительными системами, такими как 1301B, 1301C и/или 1301D, по сети 1309 передачи данных (следует отметить, что компьютерные системы 1301B, 1301C и/или 1301D могут иметь архитектуру, одинаковую с компьютерной системой 1301A, или другую архитектуру, и могут быть расположены в различных пунктах, например, компьютерные системы 1301A и 1301B могут быть расположены на производственной площадке и сообщаться с одной или более компьютерными системами, такими как 1301C и/или 1301D, которые расположены в одном или более центрах обработки данных, и/или находящихся в различных странах на разных континентах).
[0113] Процессор может содержать микропроцессор, микроконтроллер, процессорный модуль или подсистему, программируемую интегральную схему, программируемую логическую матрицу или другое устройство управления или вычислительное устройство.
[0114] Носитель 1306 данных может быть реализован в виде одного или более считываемых компьютером или машиночитаемых носителей данных. Следует отметить, что хотя в приведенном в качестве примера варианте реализации по фиг. 13 носитель 1306 данных находится внутри компьютерной системы 1301A, в некоторых вариантах реализации носитель 1306 данных может быт распределен в пределах и/или по нескольким внутренним и/или внешним устройствам вычислительной системы 1301A и/или дополнительных вычислительных систем. Носитель 1306 данных может включать один или более различных видов памяти, в том числе полупроводниковые запоминающие устройства, такие как динамические или статические оперативные запоминающие устройства (DRAM или SRAM), стираемые программируемые постоянные запоминающие устройства (EPROM), электрически-стираемые программируемые постоянные запоминающие устройства (EEPROM) и флэш-память, магнитные диски, например, жесткие, гибкие и съемные диски, другие магнитные носители данных, в том числе носители на магнитной ленте, оптические носители данных, такие как компакт-диски (CD) или цифровые видеодиски (DVD), диски BLURAY® или другие типы оптических носителей данных, или другие типы запоминающих устройств. Следует отметить, что описанные ранее команды могут быть предоставлены на одном читаемом компьютером или машиночитаемом носителе данных, или, альтернативно, они могут быть предоставлены на нескольких читаемых компьютером или машиночитаемых носителей данных, распределенных в большой системе, вероятно содержащей несколько узлов. Такой читаемый компьютером или машиночитаемый носитель или носители данных считается (считаются) частью изделия (или готового изделия). Изделие или готовое изделие может представлять собой любой готовый отдельный компонент или несколько компонентов. Носитель или носители данных могут быть размещены в компьютере, выполняющем машиночитаемые команды, или могут находиться в удаленном пункте, из которого машиночитаемые команды могут загружаться по сети для выполнения.
[0115] В некоторых вариантах реализации вычислительная система 1300 содержит один или более модулей 1308 управления буровой установкой. В примере вычислительной системы 1300, компьютерная система 1301A содержит модуль 1308 управления буровой установкой. В некоторых вариантах реализации один модуль управления буровой установкой может быть использован для выполнения некоторых или всех аспектов одного или более вариантов реализации способов, описанных в настоящем документе. В альтернативных вариантах реализации для выполнения некоторых или всех аспектов способов, описанных в настоящем документе, может быть использовано множество модулей управления буровой установкой.
[0116] Вычислительная система 1300 является одним из примеров вычислительной системы; в других примерах вычислительная система 1300 может содержать больше или меньше компонентов, чем показано, может содержать дополнительные компоненты, не показанные в приведенном в качестве примера варианте реализации по фиг. 13, и/или вычислительная система 1300 может иметь другую конфигурацию или расположение компонентов, показанных на фиг. 13. Различные компоненты, изображенные на фиг. 13, могут быть реализованы в форме аппаратного обеспечения, программного обеспечения или сочетании аппаратного и программного обеспечения, содержащем одну или более интегральных схем для обработки сигналов и/или специализированных интегральных схем.
[0117] Также, этапы способов обработки, описанных в настоящем документе, могут быть реализованы посредством функционирования одного или более функциональных модулей устройства обработки информации, такого как универсальные процессоры или специализированные микросхемы, например, специализированные интегральные схемы (ASIC), программируемые логические интегральные схемы (FPGA), программируемые логические устройства (PLD) или другие подходящие устройства. Эти модули, сочетания указанных моделей и/или их сочетания с универсальными аппаратными средствами находятся в пределах защищаемого объема изобретения.
[0118] Предшествующее описание было приведено со ссылкой на конкретные варианты реализации с целью пояснения. Однако предшествующее иллюстративное описание не является исчерпывающим и не ограничивает изобретение конкретными раскрытыми формами. На основании изложенных выше принципов возможны многочисленные модификации и изменения. Кроме того, порядок, в котором элементы способов описаны и проиллюстрированы в настоящем документе, может быть изменен и/или два или более элементов могут выполняться одновременно. Варианты реализации были выбраны и описаны с целью наиболее эффективного пояснения принципов изобретения и его практических применений, чтобы позволить специалистам в данной области техники наиболее эффективно использовать изобретение и различных вариантов реализации с различными модификациями, в соответствии с конкретным предполагаемым применением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ГЛУБИНЫ СПУСКА БУРИЛЬНОЙ КОЛОННЫ | 2015 |
|
RU2658183C1 |
| СИСТЕМА УПРАВЛЕНИЯ БУРОВОЙ УСТАНОВКОЙ | 2016 |
|
RU2667545C1 |
| ХАРАКТЕРИЗУЮЩИЕ ОТКЛИКИ В БУРОВОЙ СИСТЕМЕ | 2016 |
|
RU2721203C2 |
| ИНСТРУМЕНТ ДЛЯ СПУСКА ОБСАДНОЙ ТРУБЫ, АНКЕРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2017 |
|
RU2745315C2 |
| ЕДИНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ БУРОВЫХ УСТАНОВОК | 2016 |
|
RU2713072C2 |
| СПОСОБ И СИСТЕМА ДЛЯ БУРЕНИЯ СКВАЖИНЫ | 2005 |
|
RU2369738C2 |
| ОЦЕНКА И КАЛИБРОВКА УСЛОВИЙ ИЗГИБА В СКВАЖИНЕ | 2013 |
|
RU2627329C1 |
| ВРАЩЕНИЕ И ОРИЕНТАЦИЯ МАГНИТНОГО ДАТЧИКА ОТНОСИТЕЛЬНО БУРОВОГО ИНСТРУМЕНТА | 2014 |
|
RU2661943C1 |
| ВЫЧИСЛЕНИЕ СКОРОСТИ И ГЛУБИНЫ БУРЕНИЯ ДЛЯ СКВАЖИННЫХ ИНСТРУМЕНТОВ | 2013 |
|
RU2582608C1 |
| АВТОМАТИЗАЦИЯ БУРЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ НА ОСНОВЕ СТОХАСТИЧЕСКОЙ ТЕОРИИ | 2013 |
|
RU2633006C1 |
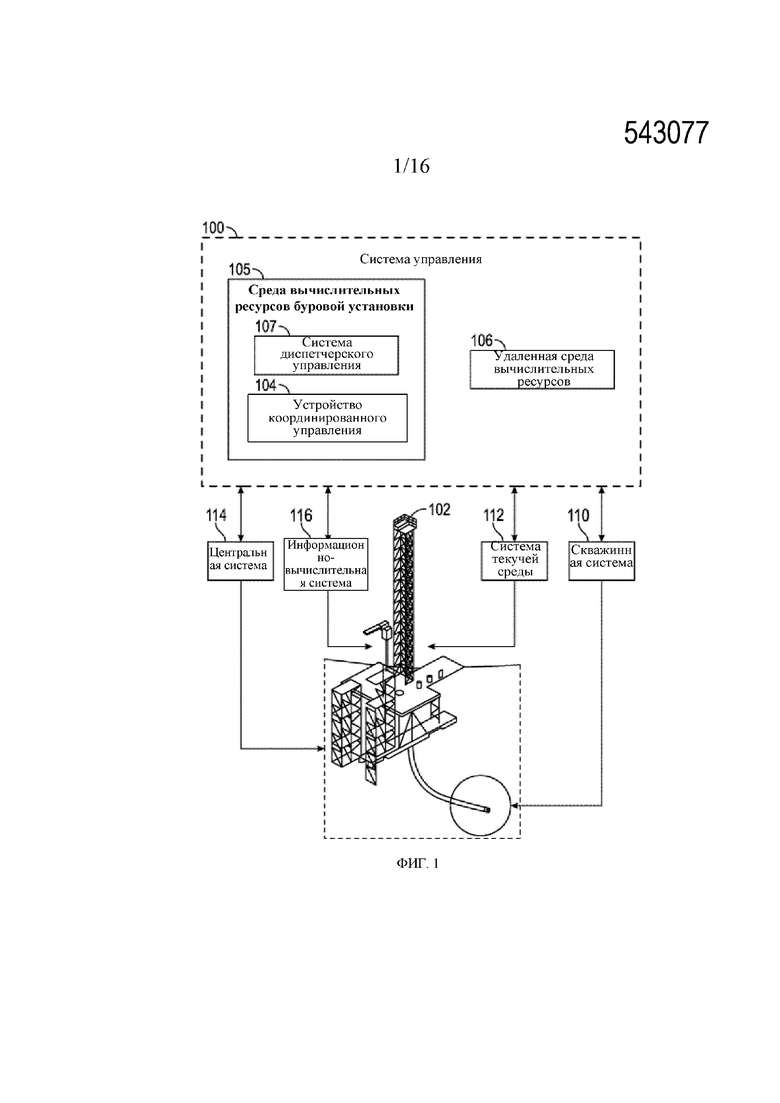
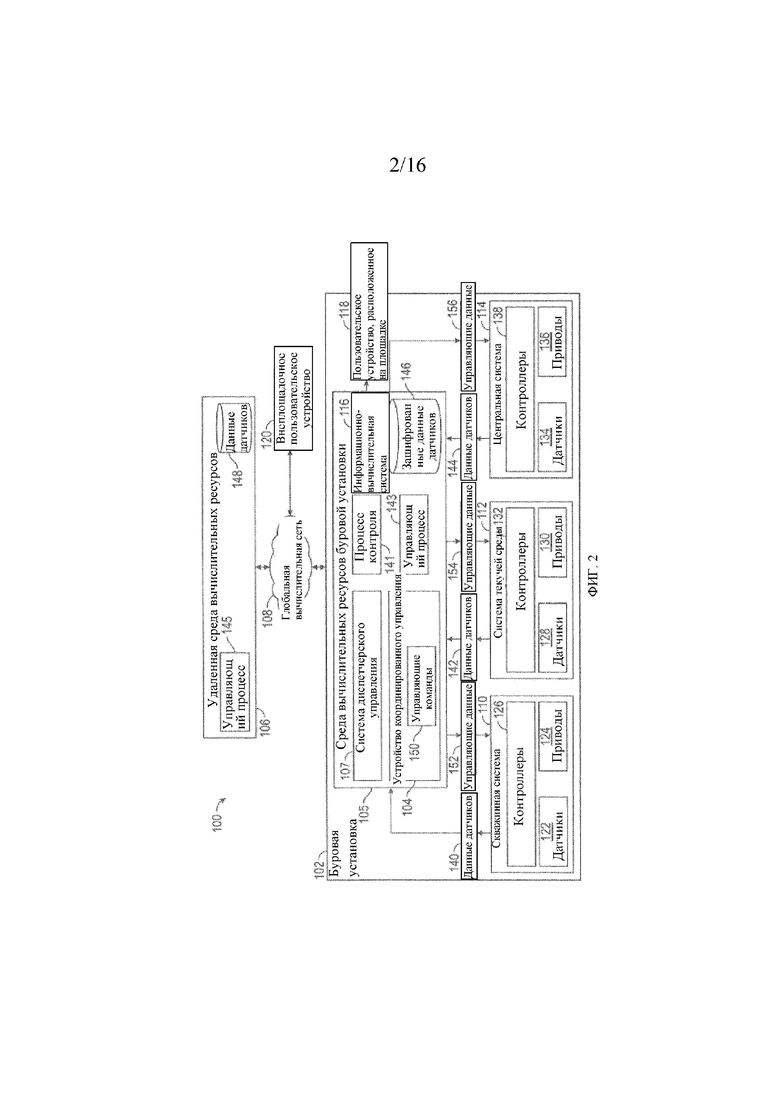
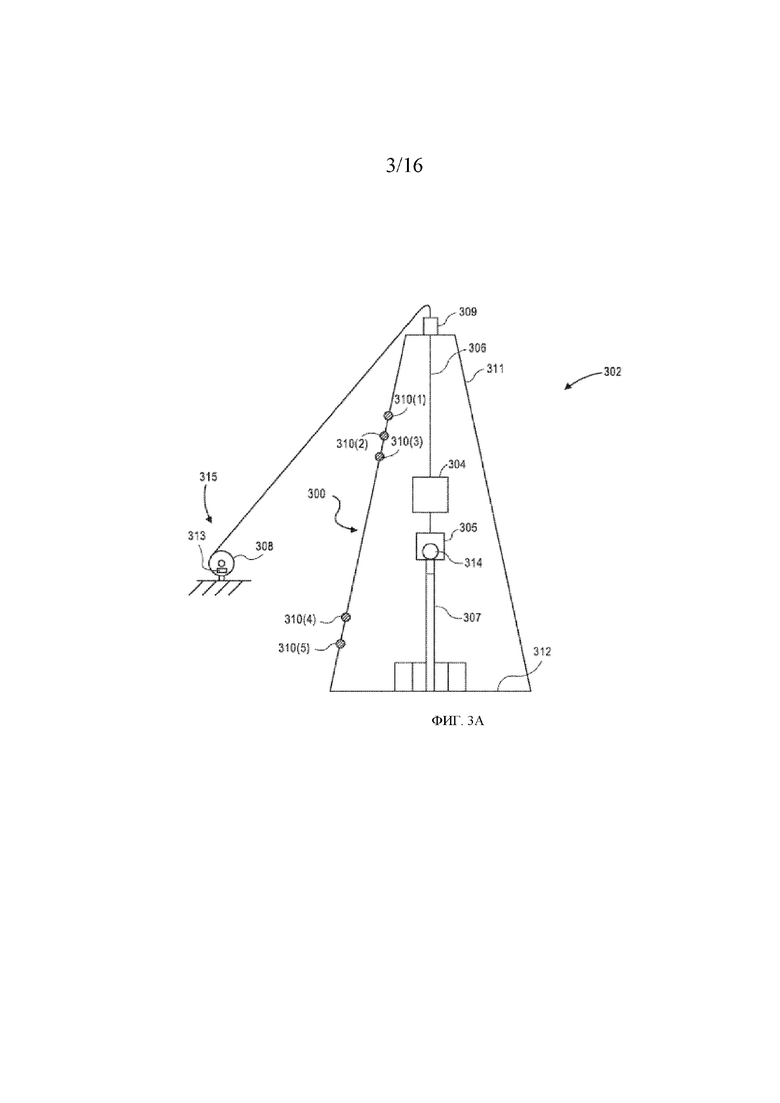
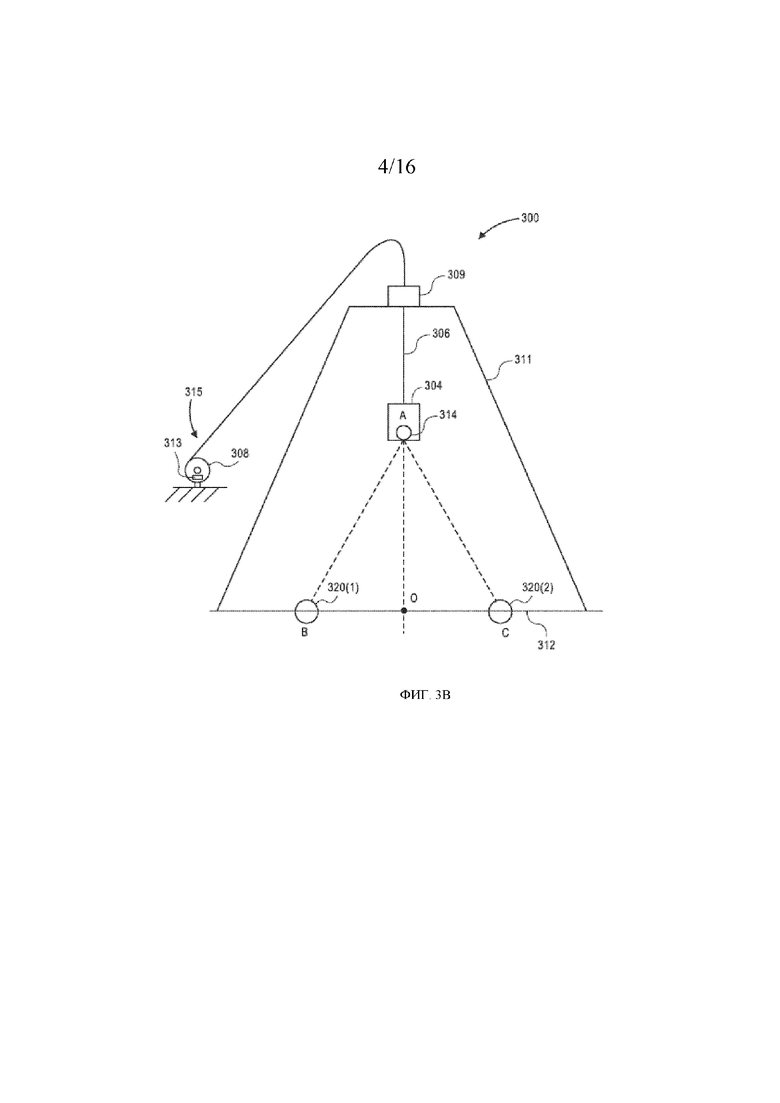
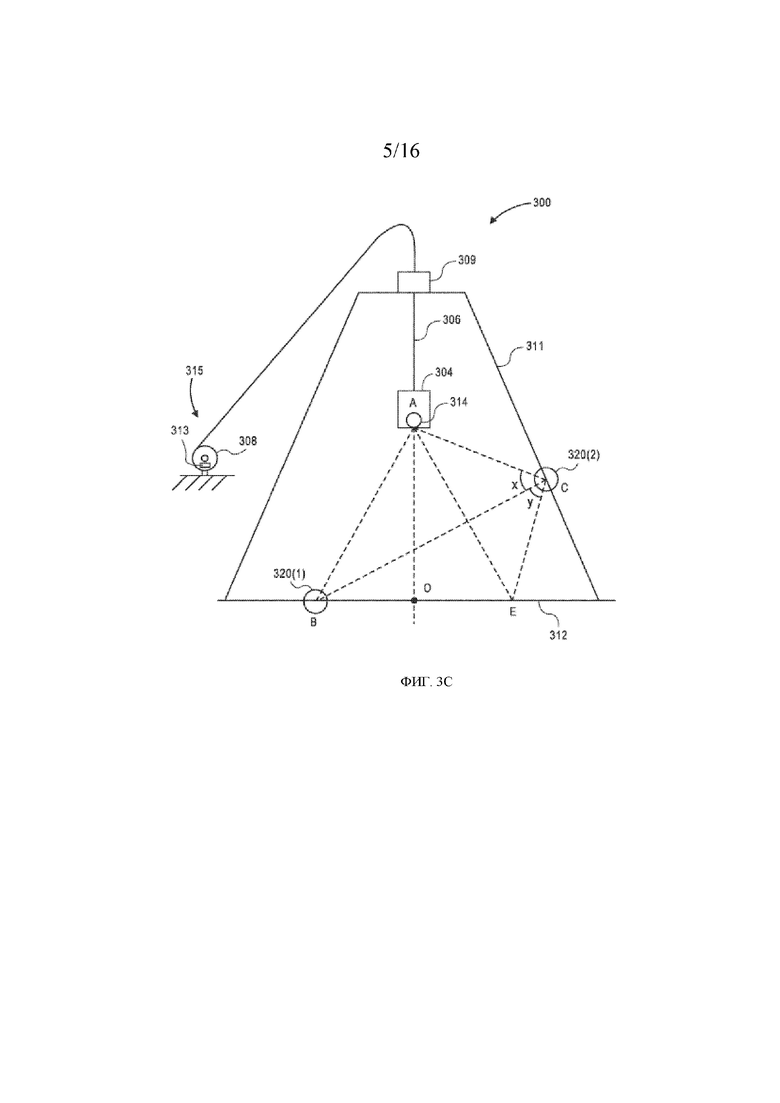
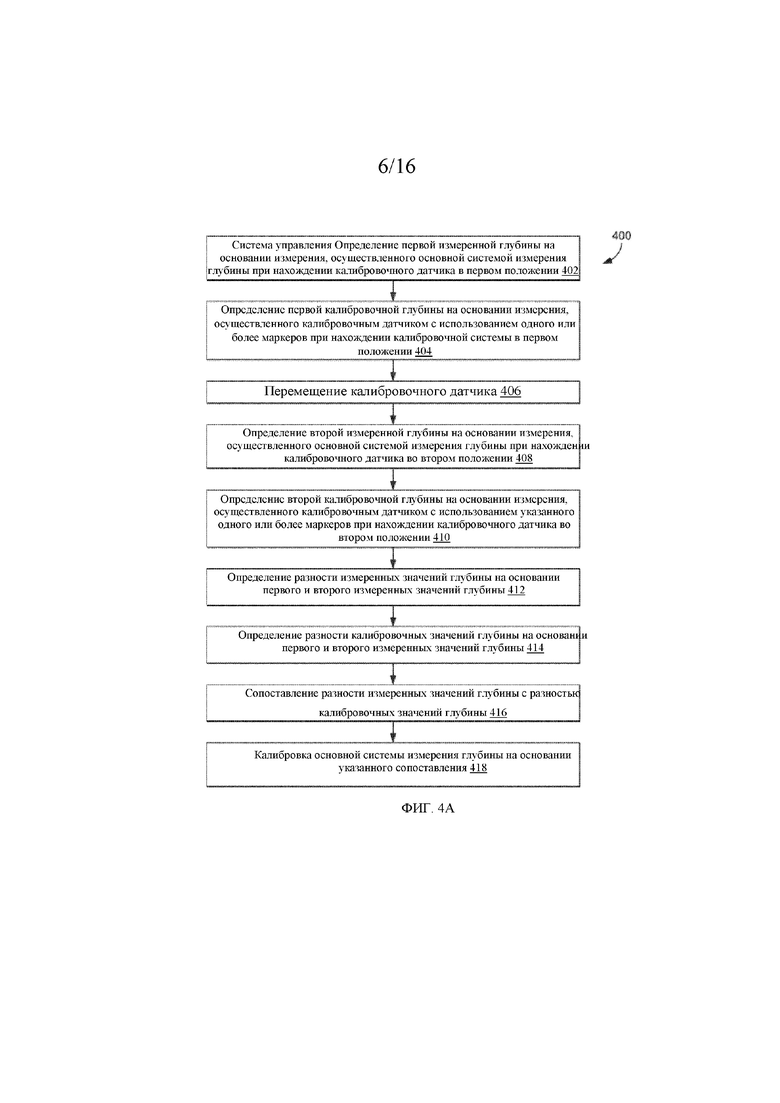
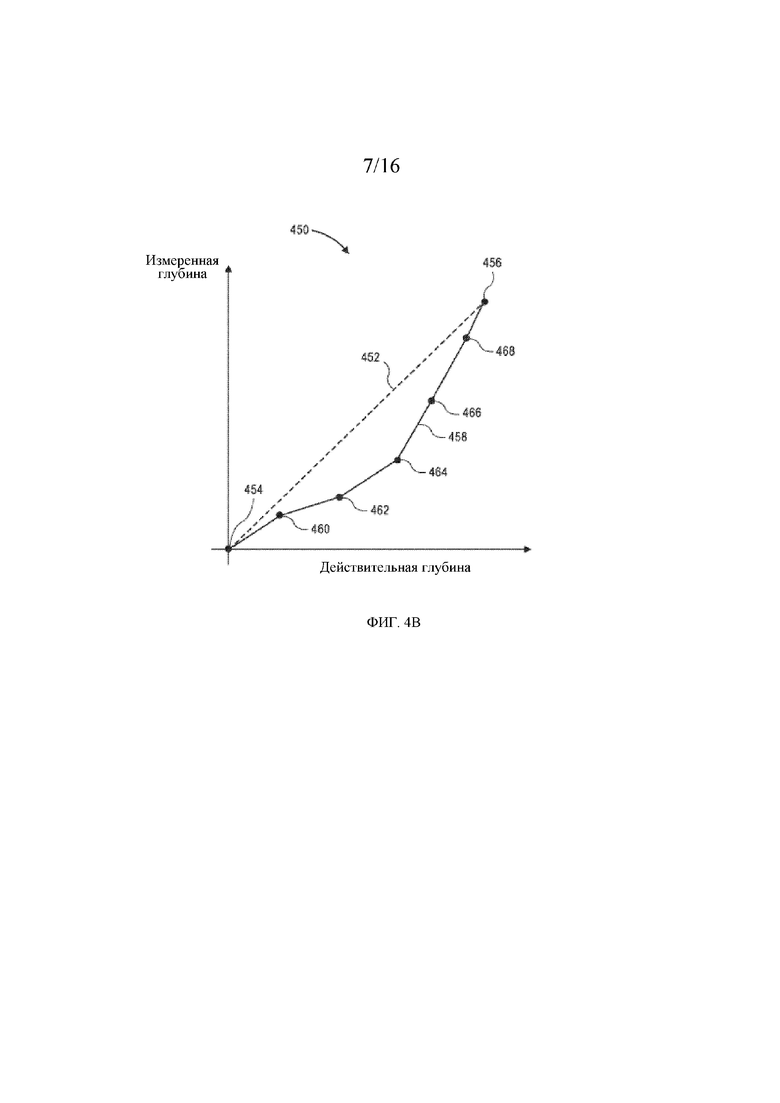
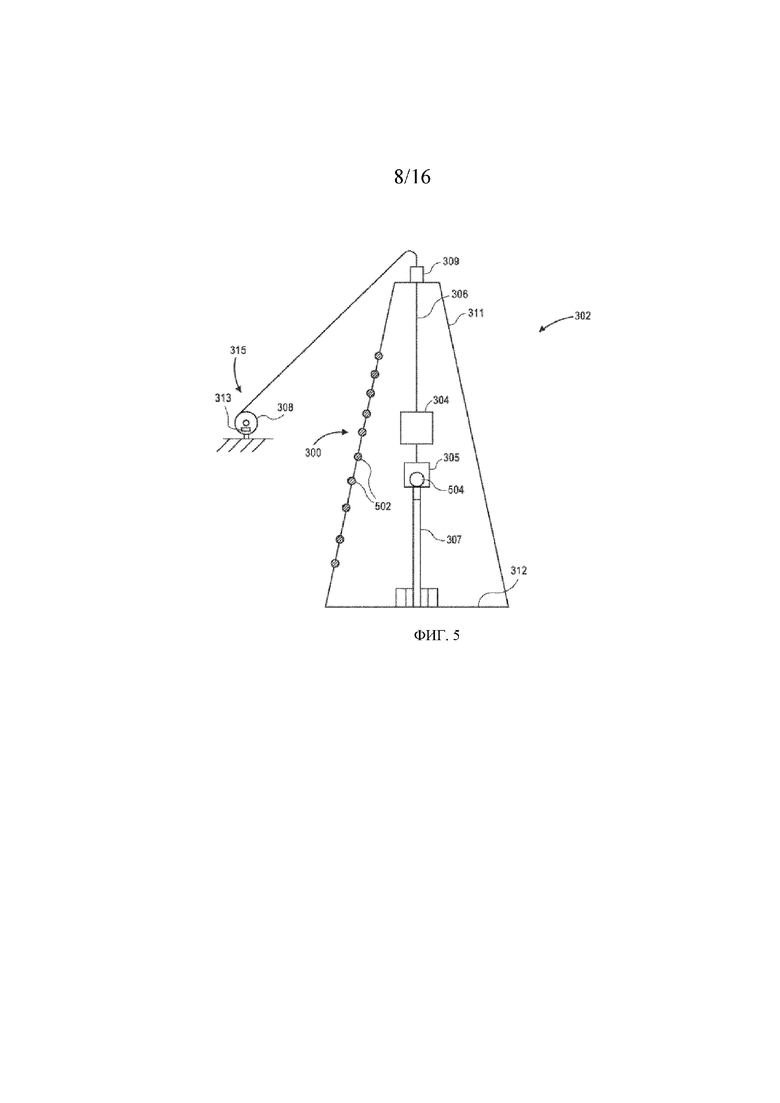
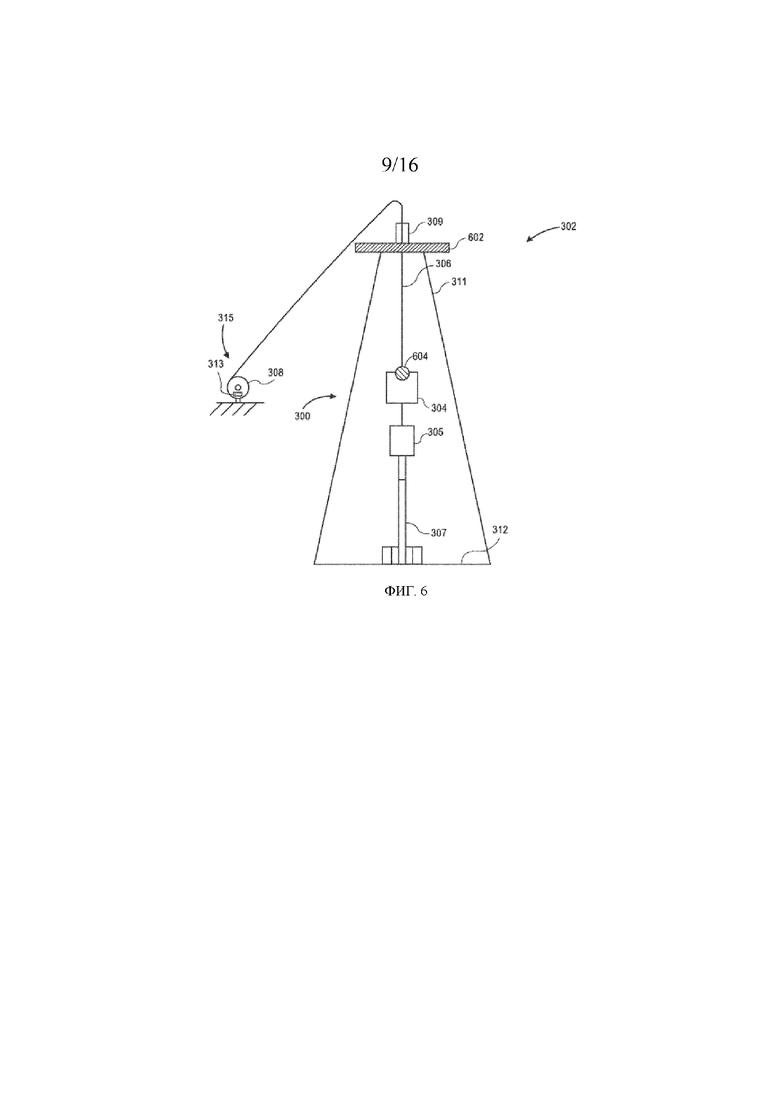
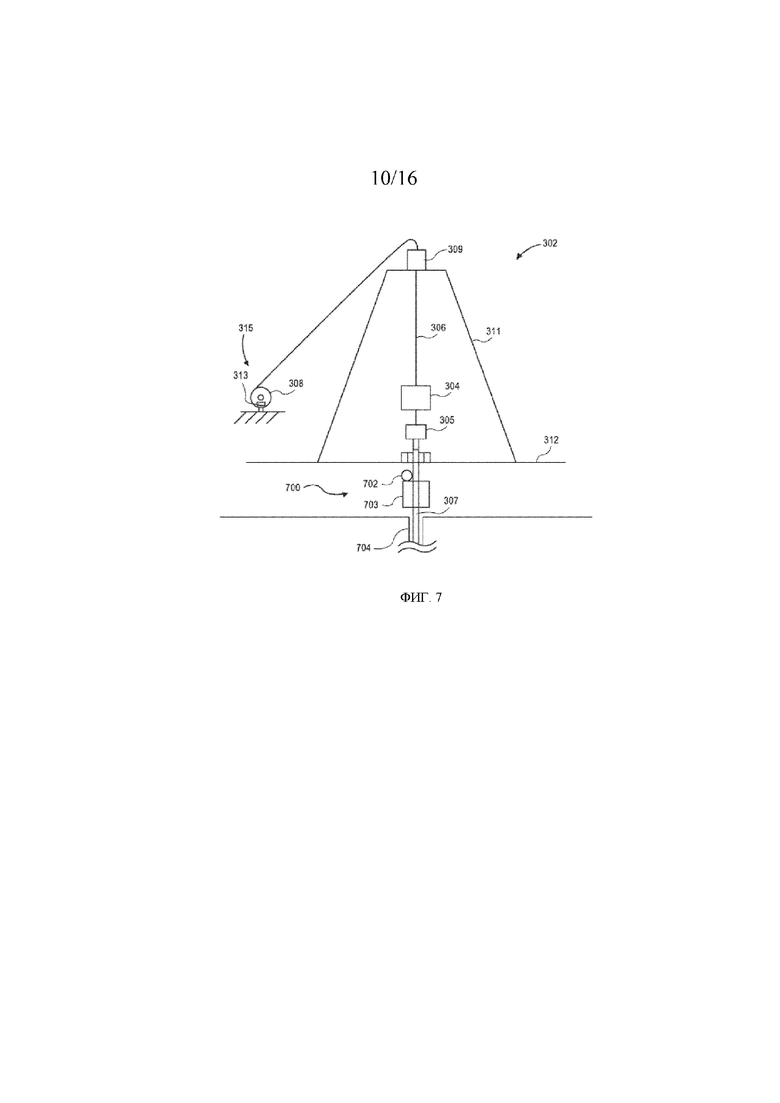
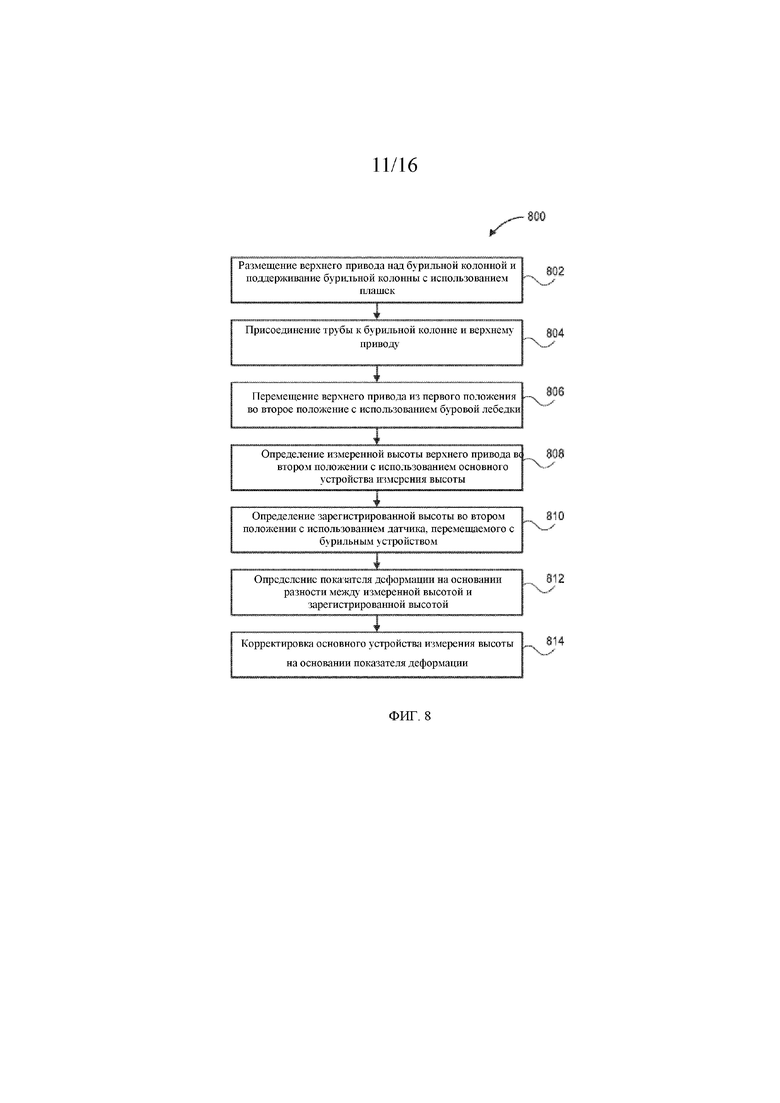
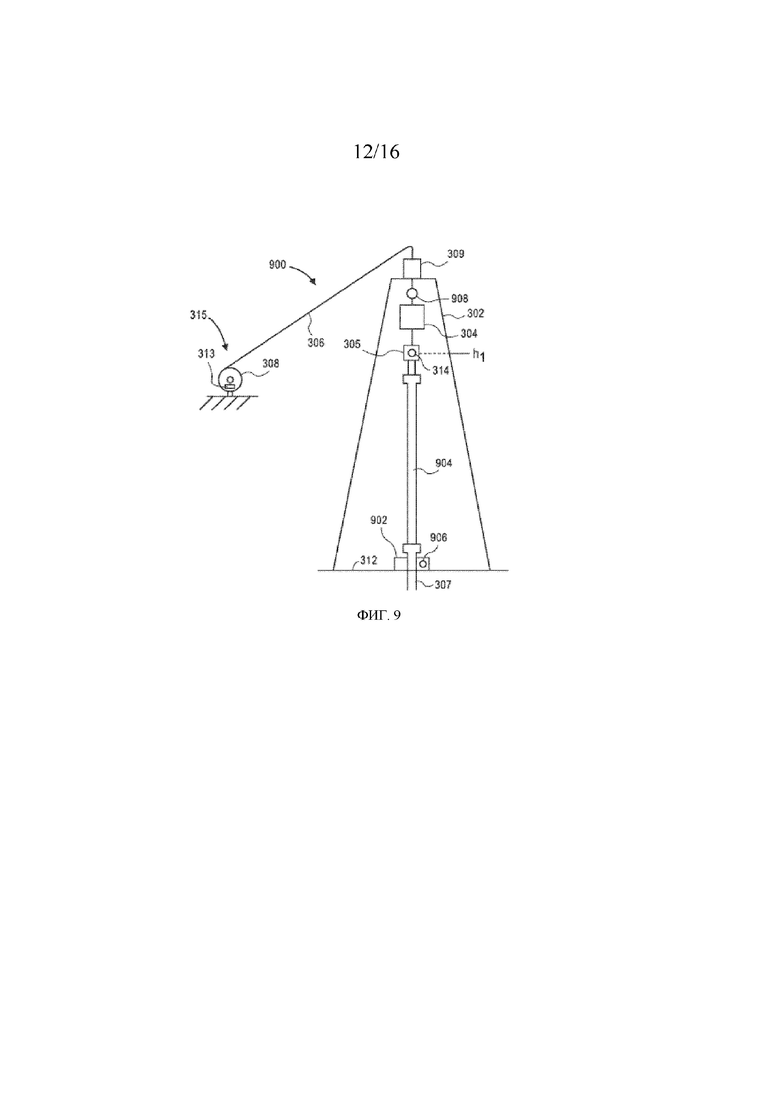
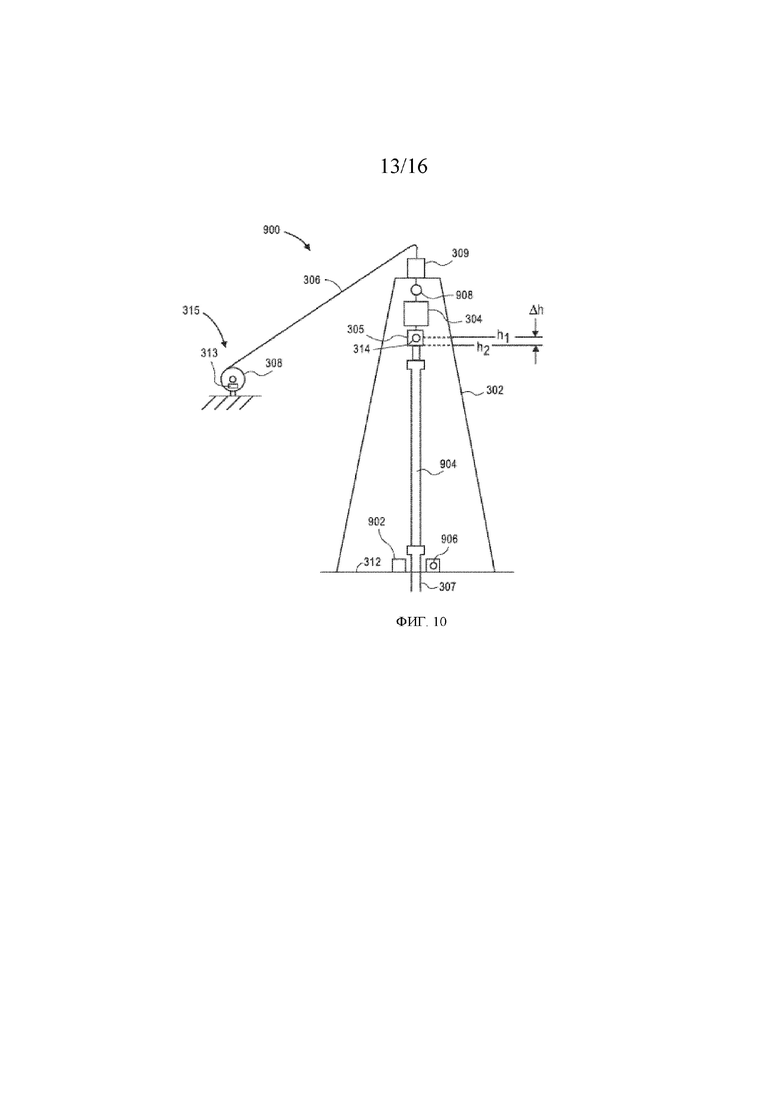
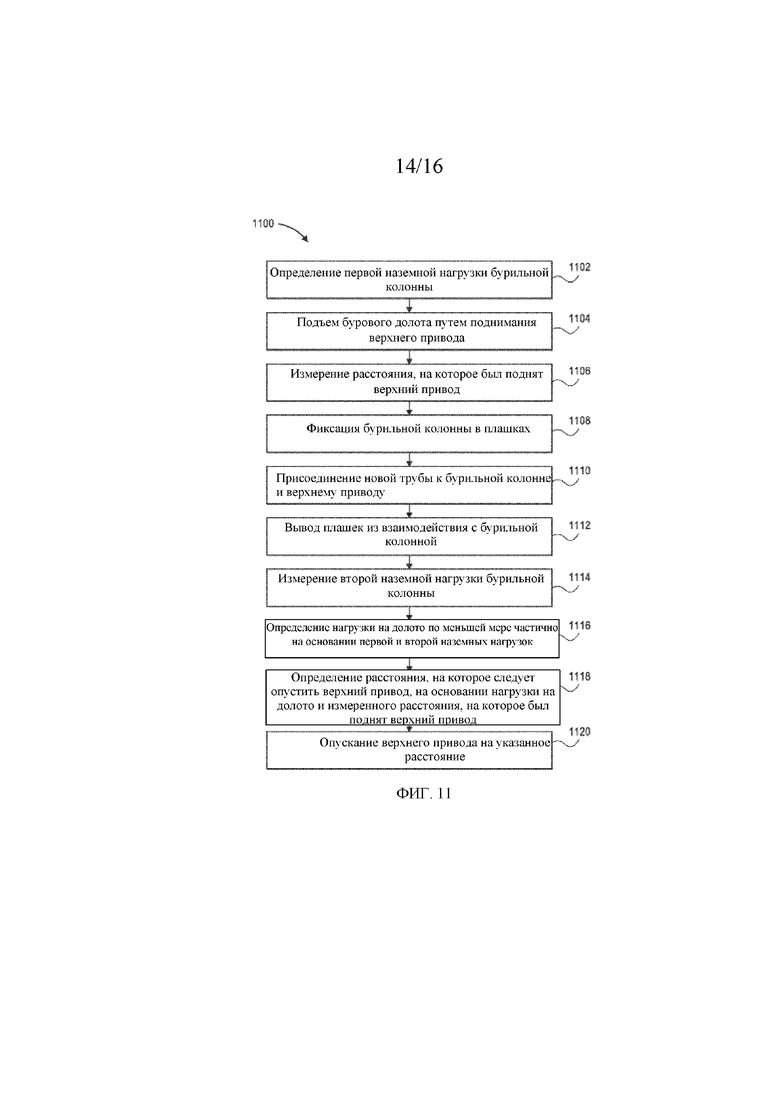
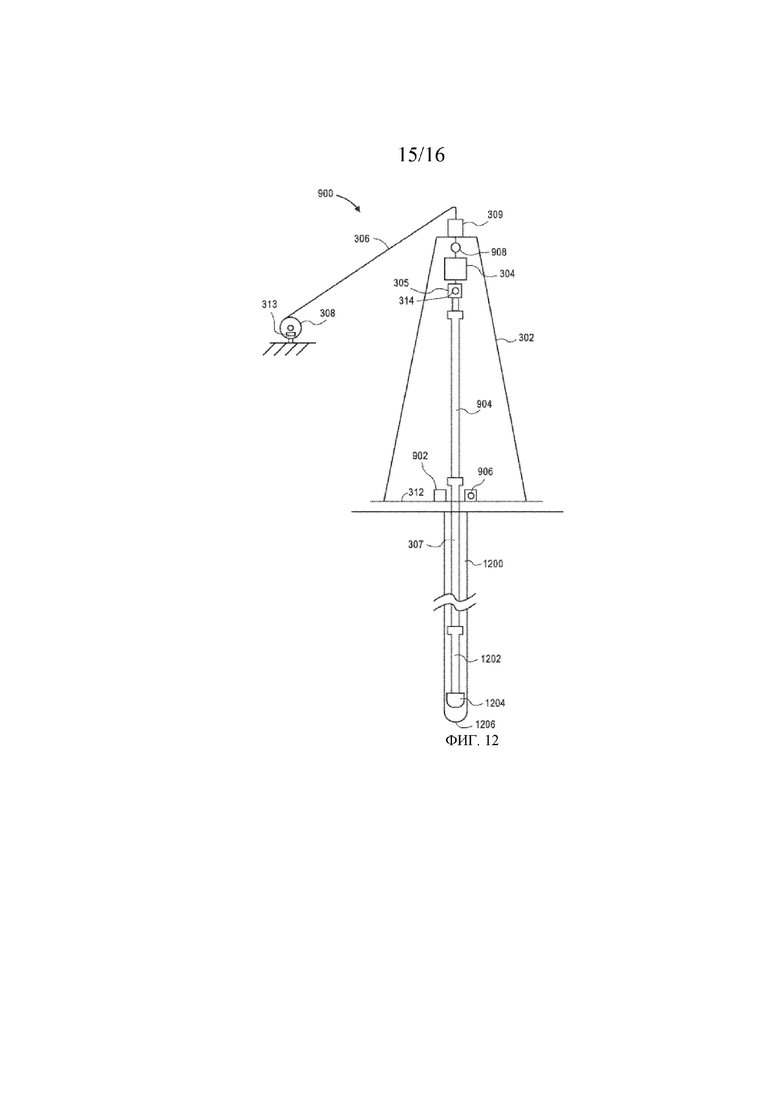
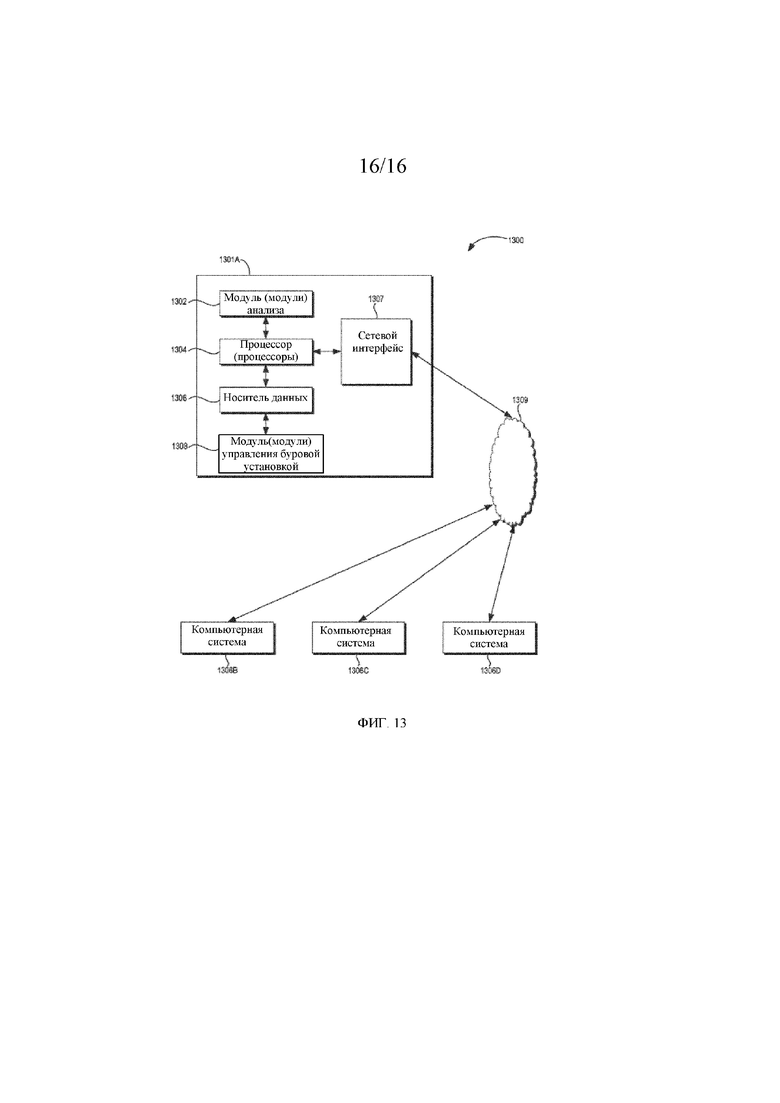
Группа изобретений относится к способу бурения ствола скважины и системам буровой установки. Технический результат заключается в поддержании эксплуатационной безопасности. В способе бурения ствола скважины осуществляют измерение первого расстояния, на которое бурильное устройство поднимают в соединении с бурильной колонной, определение нагрузки на долото в бурильной колонне, определение второго расстояния для спускания бурильного устройства таким образом, что буровое долото на нижнем конце бурильной колонны приближается к забою ствола скважины, на основании первого расстояния и нагрузки на долото и спуск бурильного устройства на второе расстояние. 3 н. и 22 з.п. ф-лы, 13 ил.
1. Способ бурения ствола скважины, в котором осуществляют:
измерение первого расстояния, на которое бурильное устройство поднимают в соединении с бурильной колонной;
определение нагрузки на долото в бурильной колонне;
определение второго расстояния для спускания бурильного устройства таким образом, что буровое долото на нижнем конце бурильной колонны приближается к забою ствола скважины, на основании первого расстояния и нагрузки на долото; и
спуск бурильного устройства на второе расстояние.
2. Способ по п. 1, в котором второе расстояние для спускания бурильного устройства содержит такое расстояние, чтобы буровое долото было введено во взаимодействие с забоем ствола скважины.
3. Способ по п. 1, в котором определение нагрузки на долото в бурильной колонне содержит измерение нагрузки на долото на нижнем конце бурильной колонны и передачу данных измерения на поверхность.
4. Способ по п. 1, в котором определение нагрузки на долото содержит:
определение первого веса, измеренного на поверхности при введении бурильной колонны во взаимодействие с забоем скважины; и
определение второго веса, измеренного на поверхности при поднятии бурильной колонны с забоя скважины, причем нагрузку на долото определяют по меньшей мере частично на основании первого веса и второго весов.
5. Способ по п. 4, в котором определение второго расстояния содержит использование первого расстояния и определение деформации бурильной колонны, обусловленной нагрузкой на долото.
6. Способ по п. 5, в котором дополнительно осуществляют:
поднятие бурильного устройства на первое расстояние в соединении бурильного устройства с бурильной колонной после определения первого веса;
фиксацию бурильной колонны в плашках после поднятия бурильного устройства на первое расстояние;
отсоединение бурильного устройства от бурильной колонны;
присоединение одной или более труб к бурильному устройству и к бурильной колонне, причем бурильную колонну фиксируют в плашках; и
выведение плашек из взаимодействия с бурильной колонной,
при этом определение второго веса осуществляют после выведения плашек из взаимодействия с бурильной колонной.
7. Система буровой установки, содержащая:
бурильное устройство, выполненное с возможностью вращения бурильной колонны;
пол буровой установки, через который принимают бурильную колонну;
буровую лебедку, соединенную с бурильным устройством посредством бурового каната, причем буровая лебедка выполнена с возможностью поднимания и опускания бурильного устройства относительно пола буровой установки путем наматывания и разматывания бурового каната;
датчик, выполненный с возможностью определения высоты бурильного устройства; и
вычислительное устройство, выполненное с возможностью обеспечения выполнения операций системой буровой установки, причем операции содержат:
измерение первого расстояния, на которое бурильное устройство поднимают в соединении с бурильной колонной;
определение нагрузки на долото в бурильной колонне;
определение второго расстояния для спускания бурильного устройства таким образом, что буровое долото на нижнем конце бурильной колонны приближается к забою ствола скважины, на основании первого расстояния и нагрузки на долото; и
спуск бурильного устройства на второе расстояние.
8. Система по п. 7, в которой датчик присоединен к бурильному устройству и выполнен с возможностью перемещения с ним посредством функционирования буровой лебедки.
9. Система по п. 7, дополнительно содержащая множество маркеров, выполненных неподвижно относительно пола буровой установки, причем датчик выполнен с возможностью обнаружения множества маркеров.
10. Система по п. 9, в которой множество маркеров могут содержать метки радиочастотной идентификации (RFID), расположенные на двух или более высотах от пола буровой установки, при этом датчик содержит считыватель меток радиочастотной идентификации (RFID) таким образом, что датчик выполнен с возможностью обнаружения близкого нахождения множества маркеров и различения множества маркеров, при этом вычислительное устройство выполнено с возможностью определения высоты бурильного устройства на основании обнаружения близкого нахождения конкретного маркера из их множества считывателем меток радиочастотной идентификации (RFID).
11. Система по п. 9, в которой датчик присоединен к бурильному устройству и в которой вычислительное устройство выполнено с возможностью триангуляции положения бурильного устройства на основании угла между датчиком и двумя или более из множества маркеров.
12. Система по п. 7, в которой определение второго расстояния содержит использование первого расстояния и определение деформации бурильной колонны, обусловленной нагрузкой на долото.
13. Система по п. 7, в которой определение нагрузки на долото содержит получение сигнала, выражающего нагрузку на долото, от датчика в компоновке низа бурильной колонны.
14. Система по п. 7, в которой определение нагрузки на долото содержит:
определение первого веса, измеренного на поверхности при введении бурильной колонны во взаимодействие с забоем ствола скважины; и
определение второго веса, измеренного на поверхности при поднятии бурильной колонны с забоя ствола скважины, причем нагрузку на долото определяют по меньшей мере частично на основании первого веса и второго веса.
15. Система по п. 14, в которой операции дополнительно содержат:
поднятие бурильного устройства на первое расстояние в соединении бурильного устройства с бурильной колонной после определения первого веса;
фиксацию бурильной колонны в плашках после поднятия бурильного устройства на первое расстояние;
отсоединение бурильного устройства от бурильной колонны;
присоединение одной или более труб к бурильному устройству и к бурильной колонне, причем бурильная колонна зафиксирована в плашках; и
выведение плашек из взаимодействия с бурильной колонной,
при этом определение второго веса осуществляют после выведения плашек из взаимодействия с бурильной колонной.
16. Система измерения для буровой установки, содержащая:
множество маркеров высоты и
датчик, выполненный с возможностью перемещения посредством буровой лебедки буровой установки, при этом буровая лебедка выполнена с возможностью перемещения талевого блока, соединенного с бурильным устройством буровой установки, при этом датчик также выполнен с возможностью определения высоты бурильного устройства путем обнаружения множества маркеров высоты.
17. Система по п. 16, в которой множество маркеров высоты расположено на различной высоте от пола буровой установки.
18. Система по п. 16, в которой датчик выполнен с возможностью приема идентификаторов от множества маркеров высоты, причем идентификаторы связаны с заданными значениями высоты множества маркеров высоты.
19. Система по п. 16, в которой по меньшей мере один из множества маркеров высоты расположен рядом с полом буровой установки и в которой по меньшей мере еще один из множества маркеров высоты расположен рядом с верхней частью буровой установки.
20. Система по п. 16, в которой два или более из множества маркеров высоты расположены на полу буровой установки или рядом с ним и в которой датчик выполнен с возможностью триангуляции высоты бурильного устройства с использованием данных измерения расстояния между датчиком и по меньшей мере двумя из множества маркеров высоты, или данных измерений углового положения между датчиком и по меньшей мере двумя из множества маркеров высоты, или обоих из них.
21. Система по п. 16, дополнительно содержащая датчик усилия, выполненный с возможностью измерения веса бурильной колонны, поддерживаемой узлом плашек.
22. Система по п. 16, дополнительно содержащая тензометрический датчик, выполненный с возможностью измерения веса бурильной колонны, поддерживаемой талевым блоком или бурильным устройством.
23. Система по п. 16, в которой датчик присоединен к бурильному устройству.
24. Система по п. 16, в которой датчик соединен с талевым блоком, на котором подвешено бурильное устройство.
25. Система по п. 16, в которой датчик содержит один или более компонентов, выбранных из группы, содержащей камеру, считыватель меток радиочастотной идентификации, оптический датчик и акустический датчик.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ автоматического поддержания заданной нагрузки на долото и устройство для его осуществления | 1986 |
|
SU1361314A1 |
| Устройство для моделирования процесса поиска эффективной осевой нагрузки на долото | 1980 |
|
SU899877A1 |
| US 5705812 A, 06.01.1998 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

