Изобретение относится к технической физике и может быть использовано при проведении летных (натурных) испытаний авиационных оптико-электронных систем и их квалиметрии на основе анализа и обработки изображений наземных объектов воздушной разведки и штриховых мир видимого диапазона.
Известен способ обнаружения средств оптического и оптоэлектронного типа (патент на изобретение RU № 2133485), заключающийся в зондировании наземного пространства сканируемым импульсным лазерным излучением, приеме оптических сигналов с заданной дальности, преобразовании принятых сигналов в видеосигнал, пороговой селекции принятых сигналов, зондировании объема пространства с фиксированной частотой, кодировании излучаемой последовательности импульсов лазерного излучения, выявлении сигнала тревоги. К недостаткам данного способа следует отнести невысокую вероятность правильного обнаружения средств оптического типа при простой пороговой обработке (селекции) принятого сигнала на фиксированной длине волны от контролируемого объема пространства, а также невозможность определения принадлежности обнаруженного оптического средства к конкретному классу средств оптоэлектронного типа, т.е. распознавания обнаруженных объектов.
Наиболее близким аналогом, известным из уровня техники, является способ обнаружения оптических и оптико-электронных средств наблюдения и устройство для его осуществления (патент на изобретение RU 2524450), который предполагает прием сигналов естественного фонового излучения, в котором измеряют спектральное распределение излучения и определяют в нем соотношение между интенсивностями спектральных компонент на трех выбранных длинах волн. По указанным величинам формируют спектральный портрет показателя световозвращения, по которому осуществляют обнаружение и распознавание оптических и оптико-электронных средств наблюдения. Технический результат которого заключается в повышении вероятности обнаружения и распознавания оптических и оптико-электронных приборов и средств наблюдения и определение их принадлежности к известным классам оптико-электронных приборов. Недостатками этого способа являются большое количество натурных экспериментов, длительность и сложность проведения натурных экспериментов.
Технической задачей заявляемого изобретения является развитие способов определения вероятности распознавания наземных объектов воздушной разведки за счет упрощения процесса обработки полученной информации без выполнения дополнительных натурных экспериментов.
Решение технической задачи обеспечивается за счет того, что на земле вдоль и поперек траектории полета летательного аппарата, оборудованного оптико-электронной системой, раскладывают полотна мир (тест-объектов), и рядом располагают наземные объекты воздушной разведки, затем при априорно заданных значениях высоты и курса полета летательного аппарата выполняют аэросъемку участков местности с размещенными штриховыми мирами и наземными объектами воздушной разведки, обрабатывают изображения, вычисляют оценки линейного разрешения на местности и вероятности распознавания наземных объектов воздушной разведки оптико-электронной системы летательного аппарата как среднее арифметическое значений оценок линейного разрешения на местности и вероятности распознавания наземных объектов, полученных всеми операторами-дешифровщиками по всем изображениям, определении фактического модуляционного контраста штриховых мир на основе результатов измерений на местности яркостей белых и темных штрихов штриховых мир в моменты выполнения аэросъемки оптико-электронной системой, в соответствии с выражением  ,
,  , где Lс и Lт - результаты измерений яркостей светлых и тёмных штрихов миры в ходе выполнения аэросъемки, кд/м2, определении контраста наземных объектов путем измерения на местности яркостей наземного объекта и фона, на котором расположен наземный объект, в моменты выполнения аэрофотосъемки оптико-электронной системой, в соответствии с выражением
, где Lс и Lт - результаты измерений яркостей светлых и тёмных штрихов миры в ходе выполнения аэросъемки, кд/м2, определении контраста наземных объектов путем измерения на местности яркостей наземного объекта и фона, на котором расположен наземный объект, в моменты выполнения аэрофотосъемки оптико-электронной системой, в соответствии с выражением  ,
,  , где Lо и Lf - результаты измерений яркостей объекта и фона в ходе выполнения аэросъемки, кд/м2, выполнении нормирования контраста штриховой миры и наземных объектов для условий аэрофотосъемки по формуле
, где Lо и Lf - результаты измерений яркостей объекта и фона в ходе выполнения аэросъемки, кд/м2, выполнении нормирования контраста штриховой миры и наземных объектов для условий аэрофотосъемки по формуле  , где s - нормировочный коэффициент, рассчитывают среднее арифметическое значение величины линейного разрешения на местности, полученное всеми дешифровщиками по всем дешифрированным изображениям
, где s - нормировочный коэффициент, рассчитывают среднее арифметическое значение величины линейного разрешения на местности, полученное всеми дешифровщиками по всем дешифрированным изображениям  , где m - общее количество результатов дешифрирования, рассчитывают вероятности распознавания наземных объектов Р=n1/n2, где n1 - число правильно распознанных объектов, n2 - число объектов, предъявленных для распознания, рассчитывают среднее арифметическое значение величины вероятности распознавания типовых объектов, полученное всеми дешифровщиками по всем дешифрированным изображениям
, где m - общее количество результатов дешифрирования, рассчитывают вероятности распознавания наземных объектов Р=n1/n2, где n1 - число правильно распознанных объектов, n2 - число объектов, предъявленных для распознания, рассчитывают среднее арифметическое значение величины вероятности распознавания типовых объектов, полученное всеми дешифровщиками по всем дешифрированным изображениям  , определении вероятности распознавания наземных объектов до уровней классификации наземных объектов: «вид», «класс», «подкласс» и «тип» в зависимости от полученного линейного разрешения на местности
, определении вероятности распознавания наземных объектов до уровней классификации наземных объектов: «вид», «класс», «подкласс» и «тип» в зависимости от полученного линейного разрешения на местности  , где Lm - полученное линейное разрешение на местности по результатам натурных экспериментов (аэросъемки), Lm0 - наихудшее линейного разрешения на местности, Lp - теоретическое (расчетное) линейное разрешение на местности, mL - математическое ожидание, σ - среднее квадратическое отклонение.
, где Lm - полученное линейное разрешение на местности по результатам натурных экспериментов (аэросъемки), Lm0 - наихудшее линейного разрешения на местности, Lp - теоретическое (расчетное) линейное разрешение на местности, mL - математическое ожидание, σ - среднее квадратическое отклонение.
Технический результат, достигаемый совокупностью признаков заявленного изобретения, состоит в расширении функциональных возможностей определения вероятности распознавания наземных объектов воздушной разведки оптико-электронной системой пилотируемых и беспилотных летательных аппаратов обработки информации, обеспечивающим сокращение количества натурных экспериментов.
Сущность изобретения заключается в следующей последовательности операций.
1. Установить на земле штриховую миру и наземные объекты вдоль и поперек направления полета летательного аппарата (пилотируемого либо беспилотного).
2. Выбрать ширину штрихов миры, исходя из теоретического (расчетного) линейного разрешения на пиксель, вычисляемого для выбранной высоты полета. Теоретическое (расчетное) линейное разрешение на пиксель определить по формуле:
где Н - высота фотографирования,  - размер пикселя, f - фокусное расстояние объектива.
- размер пикселя, f - фокусное расстояние объектива.
3. Выполнить аэросъемку местности с размещенными на ней штриховыми мирами и наземных объектов с помощью оптико-электронной (аэрофотографической) системы при заданных значениях высоты и курса полета ЛА.
Курс полета ЛА выбирается таким образом, чтобы продольные и поперечные оси штрихов штриховых мир находились в пределах ±10° от линий перпендикулярных и параллельных направлению полета, соответственно.
Боковое удаление линии пути ЛА от штриховых мир и наземных объектов, расположенных на земной поверхности, выбирается таким образом, чтобы изображения штриховых мир и наземных объектов попадали в центр аэроснимка.
Полеты проводятся при отсутствии облачности и тумана в слое атмосферы между траекторией полета ЛА и земной поверхностью, на которой размещены штриховые миры и наземные объекты.
4. Определить фактический модуляционный контраст штриховых мир путем измерения на местности яркостей белых и темных штрихов в моменты выполнения аэрофотосъемки оптико-электронной (аэрофотографической) системой. Модуляционный контраст определяется по формуле
где Lс и Lт - результаты измерений яркостей светлых и тёмных штрихов миры в ходе выполнения аэросъемки, кд/м2.
Определить контраст наземных объектов путем измерения на местности яркостей наземного объекта и фона, на котором расположен наземный объект, в моменты выполнения аэрофотосъемки оптико-электронной (аэрофотографической) системой. Контраст наземного объекта определяется по формуле
где Lо и Lf - результаты измерений яркостей объекта и фона в ходе выполнения аэросъемки, кд/м2.
Выполнение нормирования контраста штриховой миры и наземных объектов для условий аэрофотосъемки:
где s - нормировочный коэффициент.
Измерение яркостей штриховой миры и наземных объектов проводится одновременно с выполнением аэрофотосъемки в моменты пролета ЛА над наземными объектами и штриховыми мирами, не менее чем в пяти точках измерения.
5. Для вычисления оценки линейного разрешения на местности и вероятности распознавания и объектов воздушной разведки оптико-электронной системы необходимо получить не менее 20 изображений штриховой миры видимого диапазона и объектов воздушной разведки.
6. Выполнить анализ полученных изображений не менее, чем тремя операторами-дешифровщиками.
7. Провести анализ полученных изображений штриховой миры видимого диапазона и объектов воздушной разведки на автоматизированном рабочем месте средств визуализации изображений.
8. Провести отбор цифровых аэроснимков, полученных при угловых колебаниях ЛА, не превышающих допустимые значения, с расположением штриховых мир в центре аэроснимка или удаленных от центра в направлении горизонтальной и вертикальной стороны аэроснимка на расстояния, не превышающие 20 % поперечного и продольного размера аэроснимка, соответственно. Отбирается не менее 20 цифровых аэроснимков с изображением штриховых мир и наземных объектов.
9. Провести дешифрирование отобранных изображений штриховой миры видимого диапазона и объектов воздушной разведки.
10. Определить распознанную группу штрихов, в которой все штрихи наблюдаются раздельно по всей их длине и наименьшую по ширине группу штрихов, в которой все штрихи различаются раздельно по всей их длине (имеется визуальное восприятие разницы в уровне серого тона на экране между каждой светлой полосой и соседними с ней темными полосами по всей их длине).
11. За окончательную величину линейного разрешения на местности принять среднее арифметическое значение, полученное всеми дешифровщиками по всем дешифрированным изображениям:
 ,
,
где m - общее количество результатов дешифрирования.
12. Определить вероятности распознавания наземных объектов. Под вероятностью распознавания Р понимается частота правильного распознавания объектов:
Р=n1/n2
где n1 - число правильно распознанных объектов, n2 - число объектов, предъявленных для распознания.
13. За окончательную величину вероятности распознавания типовых объектов принять среднее арифметическое значение, полученное всеми дешифровщиками по всем дешифрированным изображениям:
,
где m - общее количество результатов дешифрирования.
14. Определить зависимость между вероятностью распознавания объекта и величиной линейного разрешения на местности. Полагая, что случайные величины подчиняются нормальному закону распределения Гаусса, вероятность распознавания можно определить из выражения, параметры которого Lm и Lp определены расчетным способом и по результатам натурных экспериментов (аэросъемки):
 ,
,
где Lm - полученное линейного разрешения на местности по результатам натурных экспериментов (аэросъемки), Lp - теоретическое (расчетное) линейное разрешение на местности.
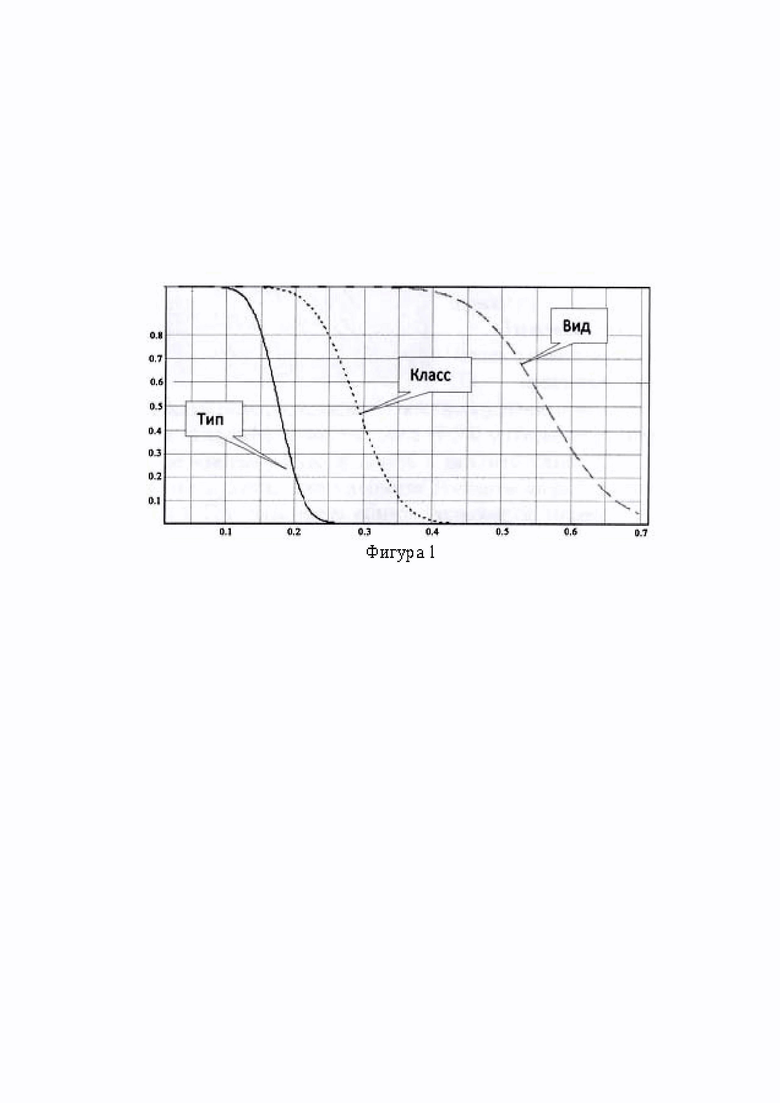
15. По полученным зависимостям определить вероятности распознавания объекта до уровней классификации наземных объектов: «вид», «класс», «подкласс» и «тип» в зависимости от требуемого (заданного) линейного разрешения на местности, поясняется фигурой 1.
Наличие в полотне штриховой миры и на наземных объектах меток радиочастотной идентификации (RFID-метки) упрощает поиск местоположения штриховой миры и объектов при планировании траектории полета летательного аппарата.
Отличием заявляемого способа является то, что при его реализации получают величины вероятностей распознавания наземных объектов воздушной разведки по ранее установленной экспериментальной зависимости величины вероятности распознавания от величины линейного разрешения на местности, что упрощает процесс получения результатов, сокращает количество натурных экспериментов, не проводя дополнительных летных натурных экспериментов.
В таблице 1 представлены результаты дешифрирования объектов, полученных ОЭЦН-ЛПЦ комплекса с БЛА «Орлан-30» с Н=500 м и наклонной дальности D =1500 м. ОЭЦН-ЛПЦ комплекса с БЛА «Орлан-30» с высоты полета Н=500 м и наклонной дальности D =1500 м обеспечивает линейное разрешение на местности (ЛРМ) в видимом канале L=0,183…0,21м. На этой дальности обеспечивается обнаружение и распознавание до уровня «тип»: авиационной техники с вероятностью 0,6…0,69, автомобильной техники с вероятностью 0,57…0,65, автотракторной с вероятностью 0,71 и бронетанковой техники с вероятностью 0,35. При этом «вид» и «класс» объектов распознается уверенно, а «тип» определить не вполне возможно.
Таблица 1 - Результаты дешифрирования объектов, полученных ОЭЦН-ЛПЦ комплекса с БЛА «Орлан-30» с Н=500 м и наклонной дальности D =1500 м
п/п
Кобъектфон/
Кобъекттень
класс
(ЗРК «Оса»)
В таблице 2 представлены результаты, показывающие эффект от применения предлагаемого способа
Таблица 2 - Сравнение существующего и заявленного способа определения вероятности распознавания объектов
Анализ результатов, представленных в таблице 2, показывает, что эффект от реализации заявленного способа определения вероятности распознавания объектов:
сокращении количества испытательных полетов на оценку ФПМ средств цифровой обработки изображений (по программе испытаний - 8 полет, выполнено - 2 полета) при сохранении высокой достоверности результатов испытаний (93,3 %);
сокращении времени на подготовку, планирование и проведение натурных экспериментов до 14 дней.
Технический результат, достигаемый совокупностью признаков заявленного изобретения, состоит в расширении функциональных возможностей определения вероятности распознавания наземных объектов воздушной разведки оптико-электронной системой пилотируемых и беспилотных летательных аппаратов обработки информации, обеспечивающим сокращение количества натурных экспериментов.
Использование: для распознавания наземных объектов. Сущность изобретения заключается в том, что осуществляют размещение на местности штриховых мир и наземных объектов воздушной разведки, оборудованных меткой радиочастотной идентификации, аэросъемку оптико-электронной системой штриховых мир и наземных объектов воздушной разведки при априорно заданных значениях высоты и курса полета летательного аппарата, выполняют определение фактического модуляционного контраста штриховых мир и контраста наземных объектов, осуществляют дешифрирование изображений штриховых мир, отображаемых на автоматизированном рабочем месте средств визуализации, не менее чем тремя операторами-дешифровщиками, по результатам которого определяются распознанные группы штрихов, в которой все штрихи наблюдаются раздельно по всей их длине и наименьшая по ширине группа штрихов, в которой все штрихи различаются раздельно по всей их длине и имеется визуальное восприятие разницы в уровне серого тона на экране между каждой светлой полосой и соседними с ней темными полосами по всей их длине, определяют величину вероятности распознавания наземных объектов воздушной разведки по установленной экспериментальной зависимости величины вероятности распознавания от величины линейного разрешения на местности. Технический результат: расширение функциональных возможностей определения вероятности распознавания наземных объектов воздушной разведки оптико-электронной системой пилотируемых и беспилотных летательных аппаратов обработки информации, обеспечивая сокращение количества натурных экспериментов. 1 ил., 2 табл.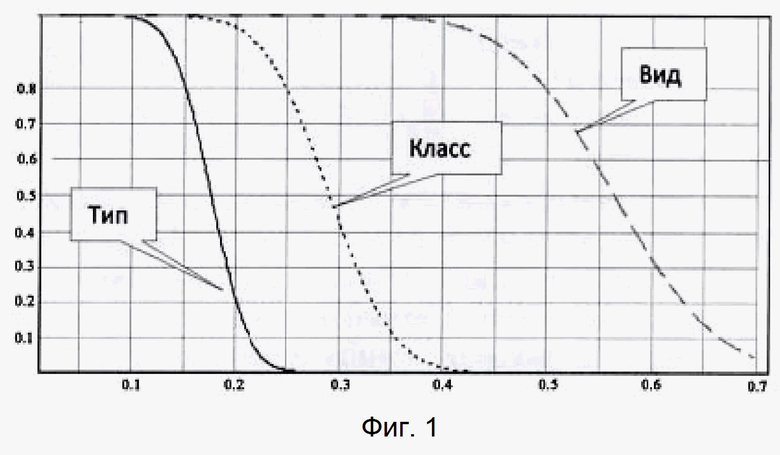
Способ определения вероятности распознавания наземных объектов воздушной разведки оптико-электронной системой летательного аппарата, заключающийся в
размещении на местности штриховых мир и наземных объектов воздушной разведки, оборудованных меткой радиочастотной идентификации,
аэросъемке оптико-электронной системой штриховых мир и наземных объектов воздушной разведки при априорно заданных значениях высоты и курса полета летательного аппарата,
определении фактического модуляционного контраста штриховых мир на основе результатов измерений на местности яркостей белых и темных штрихов штриховых мир в моменты выполнения аэросъемки оптико-электронной системой, в соответствии с выражением  ,
,  , где Lс и Lт – результаты измерений яркостей светлых и тёмных штрихов миры в ходе выполнения аэросъемки, кд/м2,
, где Lс и Lт – результаты измерений яркостей светлых и тёмных штрихов миры в ходе выполнения аэросъемки, кд/м2,
определении контраста наземных объектов путем измерения на местности яркостей наземного объекта и фона, на котором расположен наземный объект, в моменты выполнения аэрофотосъемки оптико-электронной системой, в соответствии с выражением  ,
,  , где Lо и Lf – результаты измерений яркостей объекта и фона в ходе выполнения аэросъемки, кд/м2,
, где Lо и Lf – результаты измерений яркостей объекта и фона в ходе выполнения аэросъемки, кд/м2,
выполнении нормирования контраста штриховой миры и наземных объектов для условий аэрофотосъемки по формуле  , где s - нормировочный коэффициент,
, где s - нормировочный коэффициент,
отборе не менее 20 цифровых аэроснимков с изображением штриховых мир и наземных объектов,
дешифрировании изображений штриховых мир, отображаемых на автоматизированном рабочем месте средств визуализации, не менее чем тремя операторами-дешифровщиками, по результатам которого определяются распознанные группы штрихов, в которой все штрихи наблюдаются раздельно по всей их длине и наименьшая по ширине группа штрихов, в которой все штрихи различаются раздельно по всей их длине и имеется визуальное восприятие разницы в уровне серого тона на экране между каждой светлой полосой и соседними с ней темными полосами по всей их длине,
вычислении оценки линейного разрешения на местности как среднее арифметическое значений оценок, каждая из которых равна определенной на изображении величине расстояния между соседними светлыми штрихами,
определении вероятности распознавания наземных объектов в соответствии с выражениям Р=n1/n2, где n1 – число правильно распознанных объектов, n2 – число объектов, предъявленных для распознания,
вычислении оценки вероятности распознавания типовых объектов как среднее арифметическое значений оценок, среднее, полученное всеми дешифровщиками по всем дешифрированным изображениям,
определении вероятности распознавания наземных объектов до уровней классификации наземных объектов: вид, класс, подкласс и тип в зависимости от полученного линейного разрешения на местности  , где Lm - полученное линейное разрешение на местности по результатам натурных экспериментов (аэросъемки), Lm0 - наихудшее линейного разрешения на местности, Lp - теоретическое (расчетное) линейное разрешение на местности, mL - математическое ожидание, σ - среднее квадратическое отклонение.
, где Lm - полученное линейное разрешение на местности по результатам натурных экспериментов (аэросъемки), Lm0 - наихудшее линейного разрешения на местности, Lp - теоретическое (расчетное) линейное разрешение на местности, mL - математическое ожидание, σ - среднее квадратическое отклонение.
| СИСТЕМА СБОРА И ОБРАБОТКИ ПОЛЁТНОЙ ИНФОРМАЦИИ ПРИ ПРОВЕДЕНИИ ЛЁТНЫХ ИСПЫТАНИЙ ЦИФРОВЫХ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОГО ДВОЙНИКА | 2023 |
|
RU2799904C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524450C1 |
| Способ дешифрирования экзогенных геологических процессов и инженерно-геологических условий | 2017 |
|
RU2655955C1 |
| Система обнаружения воздушных и наземных целей | 2019 |
|
RU2712468C1 |
| CN 103856748 A, 11.06.2014 | |||
| CN 114357227 A, 15.04.2022. | |||

