Группа изобретений относится к области лечебной медицины и медицинской техники, а именно к комплексному лечению нарушений микроциркуляции, и может быть использована для лечения нарушений системного кровотока в микрососудах, в том числе у пациентов в критическом состоянии (синдром мультиорганной дисфункции, постреанимационная болезнь).
Болезни системы кровообращения занимают первое место среди всех причин инвалидности и гибели человека в большинстве экономически развитых стран мира, в том числе и в России.
Известен способ лечения нарушений микроциркуляции, основанный на синхронизации вазомоторной активности микрососудов за счет воздействия непрерывными колебательными движениями с частотой, приближенной к частотным колебаниям системного кровотока в микрососудах (RU 2545 444 опубл. 27.03.2015) в диапазоне 0,07-0,145 Гц. Этот способ является ближайшим аналогом заявляемого способа.
Недостатком способа является отсутствие амплитудной модуляции, повышающей эффективность лечебного воздействия, отсутствие режима длительного непрерывного воздействия, необходимость специальной позы пациента при воздействии, что неприемлемо для пациентов, находящихся в тяжелом и критическом состоянии (синдром мультиорганной дисфункции, постреанимационная болезнь), а также отсутствие медленноволнового воздействия в диапазоне эндотелий-зависимых колебаний микрокровотока.
Известно также устройство для улучшения системной микроциркуляции, представляющее собой «инверсионный стол», состоящий из поверхности для лежания с поворотной рамой и опорного элемента, оснащенного основанием, выполненным в виде прямоугольной плоской рамной конструкции, углы которой оборудованы петлями с креплением на них поворотных консольных опор, увеличивающих опорную базу (RU 2545 444 опубл. 27.03.2015).
К недостаткам устройства относится отсутствие обеспечения непрерывности воздействия, отсутствие возможности передачи амплитудно-модулированных колебаний, фиксация пациента в определенной позе без учета его физического состояния, что особенно важно для пациентов, находящихся в тяжелом и критическом состоянии.
Техническим результатом группы изобретений является повышение эффективности влияния за счет непрерывности лечебного воздействия и дополнительных режимов лечебного алгоритма, произвольное размещение пациента в лежачем положении в соответствии с тяжестью его физического состояния, без необходимости фиксации в определенной позе, выбор режима воздействия, управление длительностью воздействия в заданном режиме.
Указанный технический результат достигается в способе лечения нарушений системного кровотока в микрососудах, включающем лечебное воздействие колебательных движений плоской поверхности для лежания, на которой расположен пациент, с частотой колебательных движений, приближенной к частотным колебаниям системного кровотока в микрососудах, отличающемся тем, что пациента в положении лежа, соответствующем его физическому состоянию, располагают на поверхности для лежания, состоящей из трех одинаковых секций с независимой позиционной фиксацией крайних секций, и снабженной функцией передачи непрерывного лечебного воздействия колебательных движений заданной частоты с использованием двух режимов:
- режима непрерывного возвратно-вращательного движения вокруг поперечной оси поверхности для лежания с частотой гармонических колебаний 0,03 Гц с заданным алгоритмом очередности движения, с задаваемыми оператором длительностью и углом отклонения плоскости для лежания от горизонтального положения при условии, что максимальный угол отклонения продольной оси-18,5 градусов, суммарное время непрерывной работы-не более 24 часов.
- режима непрерывных модулированных по амплитуде колебательных движений-с частотой 0,1 Гц + 0,025 Гц, задаваемых путем непрерывного циклического возвратно-вращательного движения вокруг поперечной оси с плавным ускорением в течение 2,5 секунд до достижения максимальной скорости с последующим замедлением к концу пятой секунды и одновременным началом нового непрерывного цикла возвратно-вращательного движения вокруг поперечной оси до заданного угла отклонения продольной оси, длительность непрерывного движения задают количеством непрерывных циклов, суммарное время непрерывной работы -не более 24 часов, максимальный угол отклонения продольной оси-18,5 градусов.
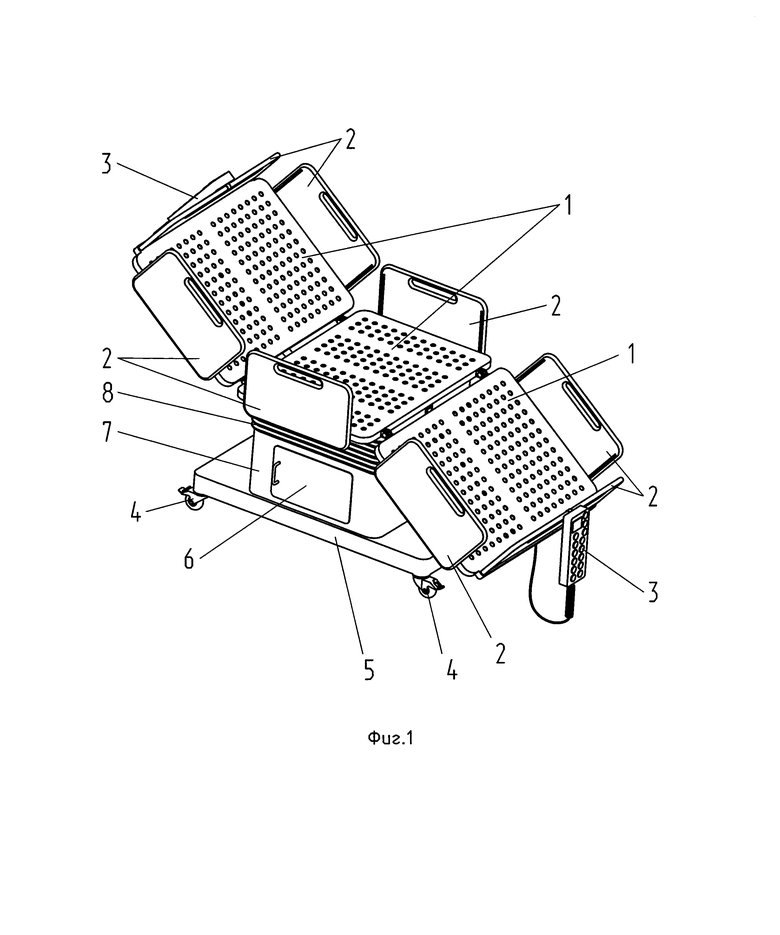
Сущность группы изобретений иллюстрируется фиг. 1-14, где: на фиг. 1-общий вид устройства, где: 1 - секции поверхности для лежания, выполненные из перфорированного высокопрочного пластика; 2 - ограничительные борта, расположенные по всему периметру поверхности для лежания, выполненные из высокопрочного пластика; 3 - пульты управления, соединенные с блоком управления 11 (фиг. 4); 4 - колеса со стопором и фиксатором положения, расположенные по краям основания 5, 5 - основание устройства, выполненное из листовой стали и уголка; 6 - дверь люка обслуживания блока управления 11 (фиг. 4) и вертикальных электрогидравлических двигателей 10 (фиг. 4);
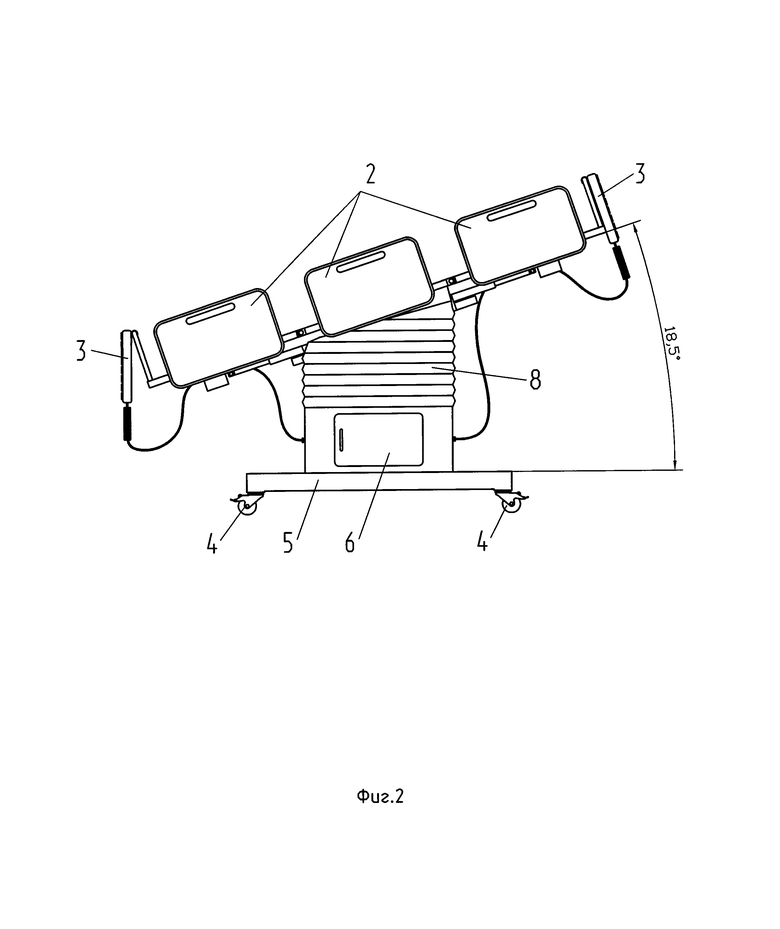
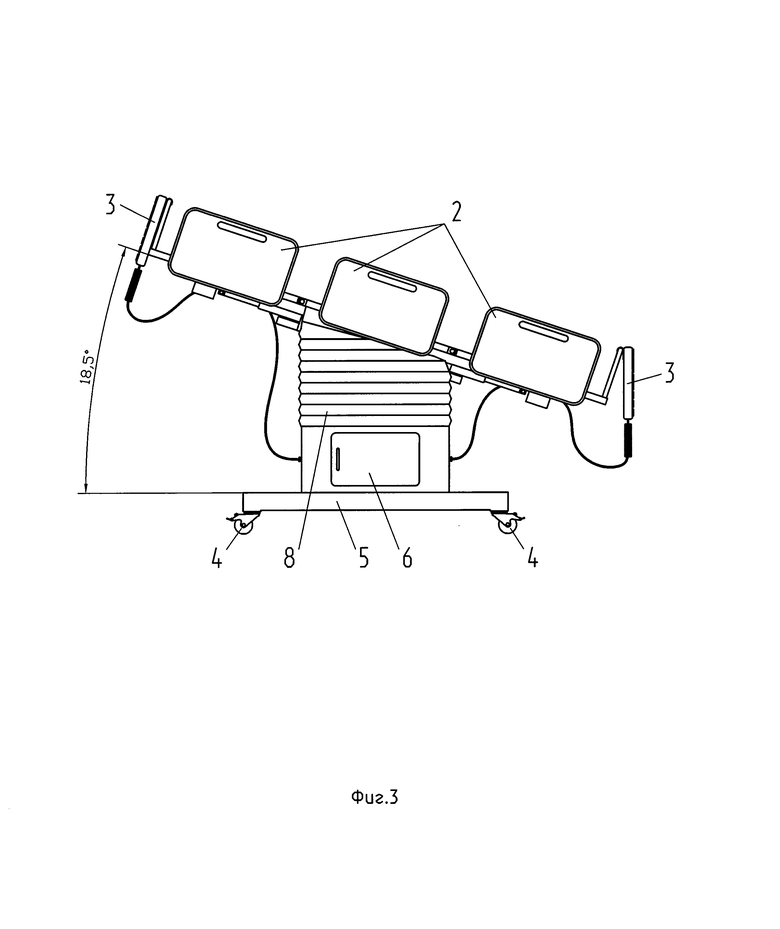
на фиг. 2, 3 - вид сбоку (по длинной стороне устройства) - показано устройство с максимальным углом 18,5 градусов поперечного качения влево (Фиг. 2) и вправо (Фиг. 3), где показан сильфон 8, представляющий собой гофрированную трубу квадратного сечения, использующуюся для закрытия рабочей зоны соединения шаровых опор 16 (фиг. 5), штока вертикального электрогидравлического двигателя 17 (фиг. 5) и рамы крепления средней секции поверхности для лежания 14 (фиг. 5);
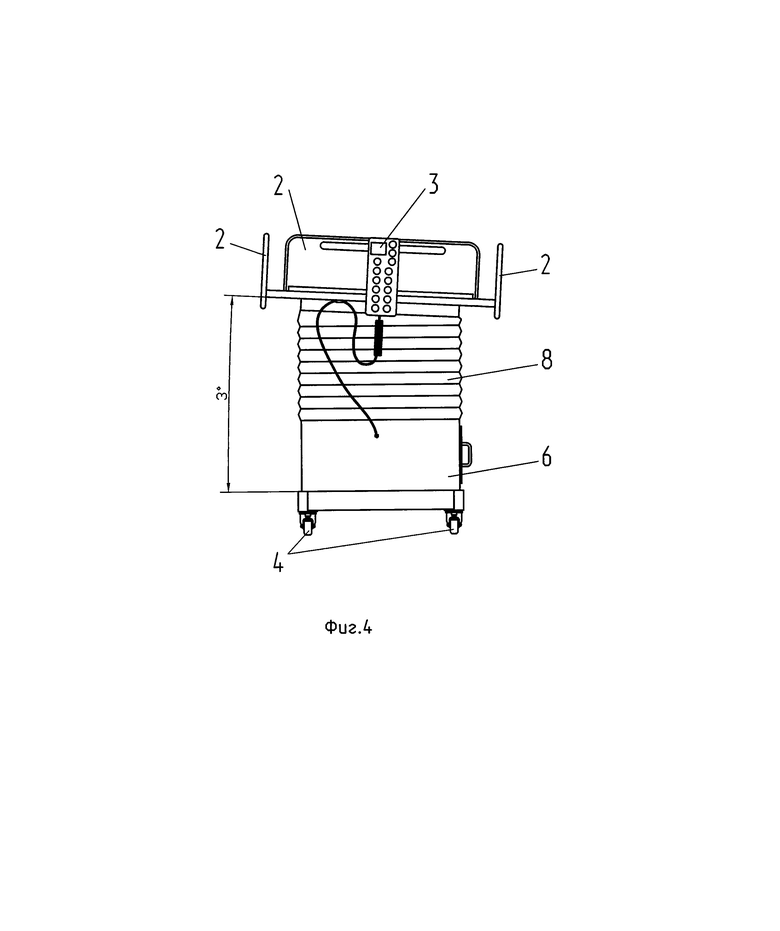
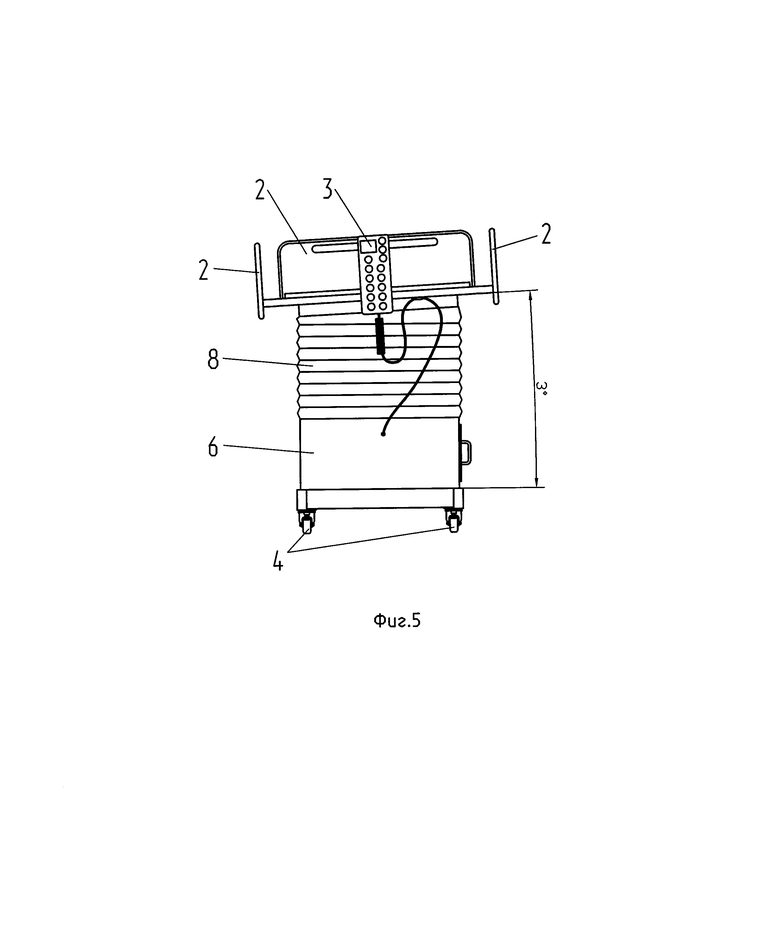
на фиг. 4, 5 - вид сбоку (с торца) - показано устройство с максимальным углом 3 градуса продольного качения вправо (Фиг. 4) и влево (Фиг. 5);
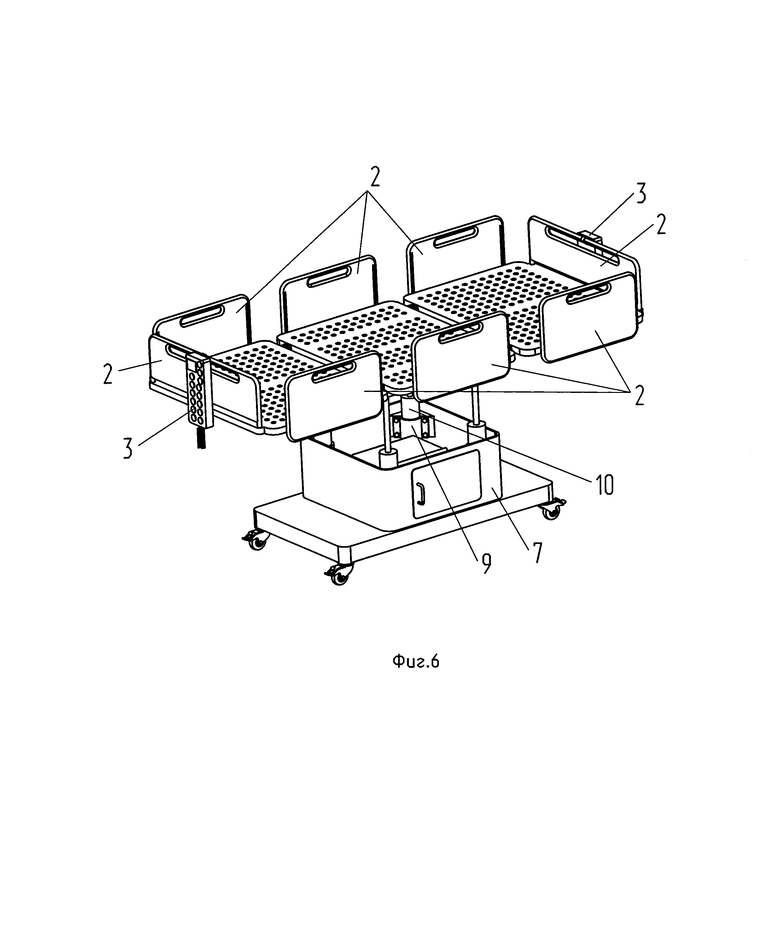
на фиг. 6 - показано устройство с защитной ширмой 7 и без сильфона 8, где показана скоба крепления 9 электрогидравлического двигателя 10 к защитной ширме 7;
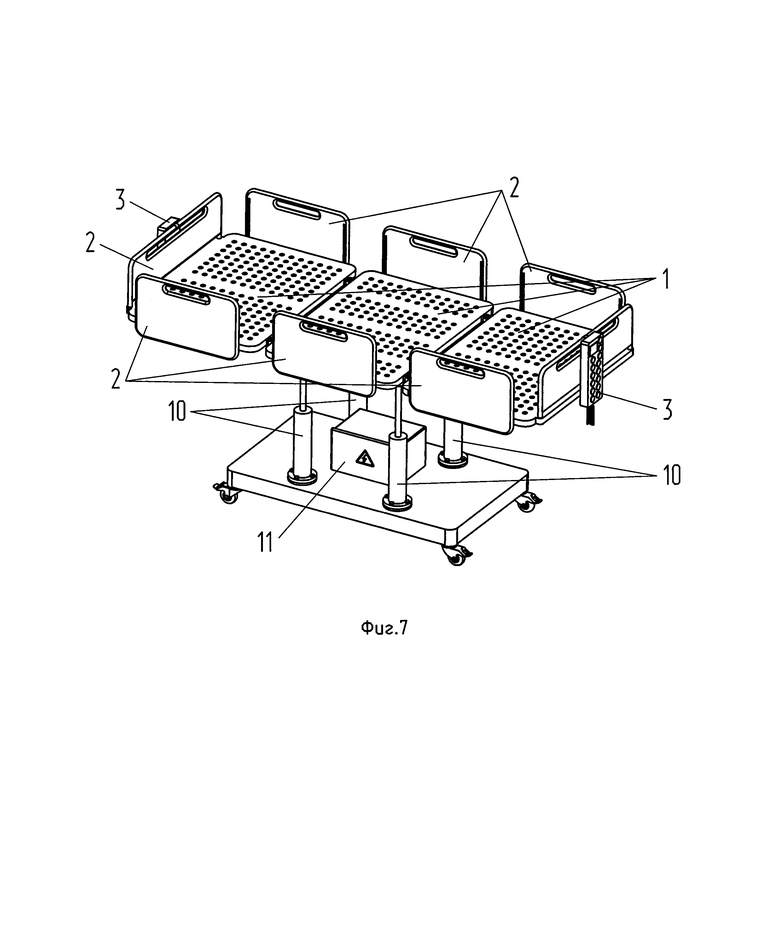
на фиг. 7 - показано устройство без сильфона 8 и защитной ширмы 7, где показаны электрогидравлические двигатели 10, блок управления устройством 11, и пульт управления устройством 3;
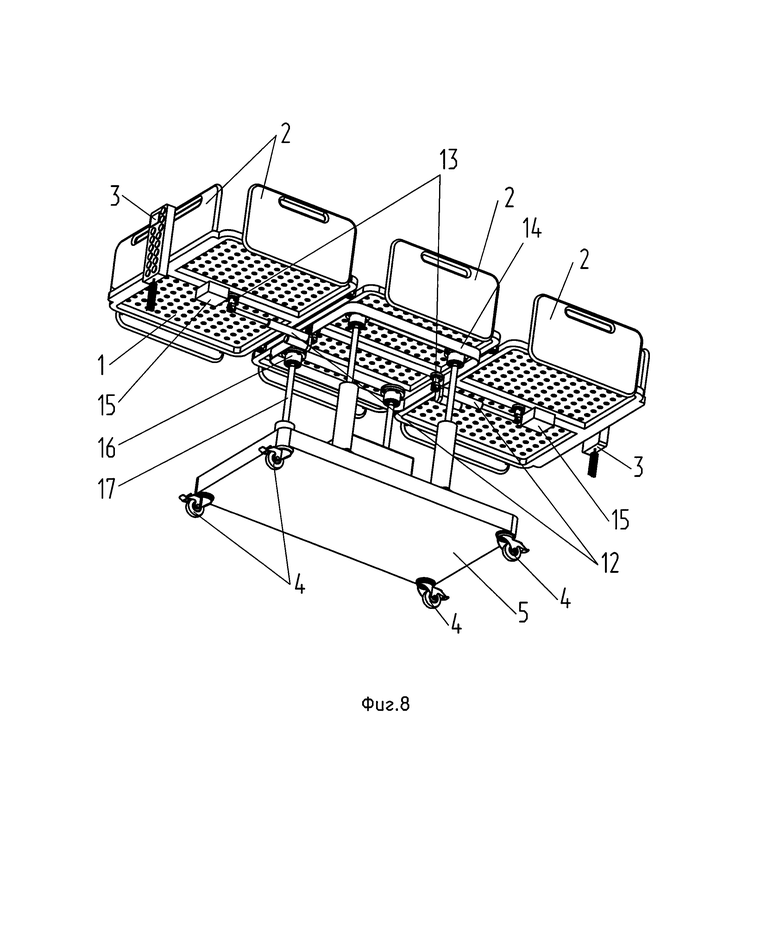
на фиг. 8 - показано устройство вид снизу, где показаны электрические линейные актуаторы 12 привода боковых секций поверхности для лежания 1. Линейные актуаторы 12 крепятся к раме 14 при помощи кронштейнов 13; также показаны гироскоп и акселерометр 15, при помощи которых, осуществляется позиционирование поверхности для лежания 1 по заданному алгоритму; также показаны соединения шаровых опор 16, штока вертикального электрогидравлического двигателя 17 и рамы крепления 14 средней секции поверхности для лежания 1;
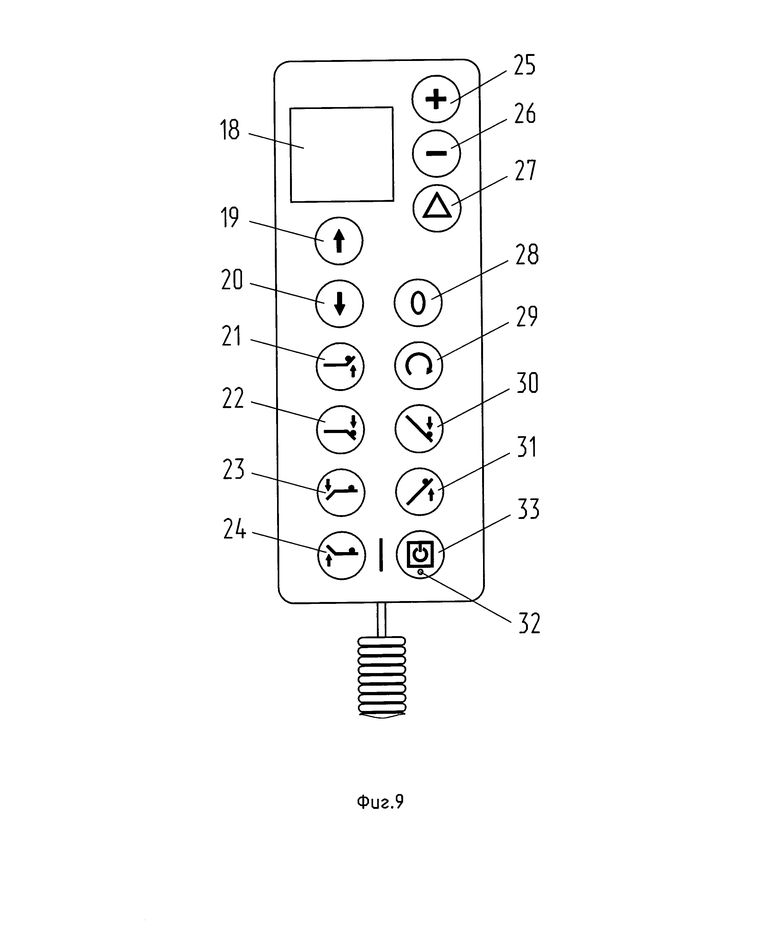
на фиг. 9 - вид пульта управления спереди, назначение кнопок пульта управления, где: 18 - экран состояния устройства (выставляемый угол процедуры, общее время работы, количество циклов, время, оставшееся до конца работы устройства, текущий угол положения устройства относительно горизонта); 19, 20 - кнопки управления подъемом секций поверхности для лежания; 21, 22 - кнопки управления подъема, опускания секции со стороны головы пациента (где лежит в данный момент голова пациента); 23, 24 - кнопки управления подъема, опускания секции со стороны ног пациента (где лежат в данный момент ноги пациента); 25, 26 - кнопки управления прибавления (+) или убавления (-), выбранного при помощи кнопки 27 вида изменяемого параметра на экране (выбранный алгоритм, выставляемый угол, количество циклов повторения); 28 - кнопка управления возврата в стартовое положение устройства; 29 - кнопка реверсивного движения (означает, что после запуска цикла (кнопки 30 и 31) устройство вернется в стартовое положение с использованием заданного алгоритма); 30, 31 - кнопки выбора старта вверх или вниз; 32 - индикатор работы устройства (зеленый цвет - устройство работает (в движении), красный цвет - устройство готово к старту - не движется); 33 - кнопка включения и выключения устройства из сети;
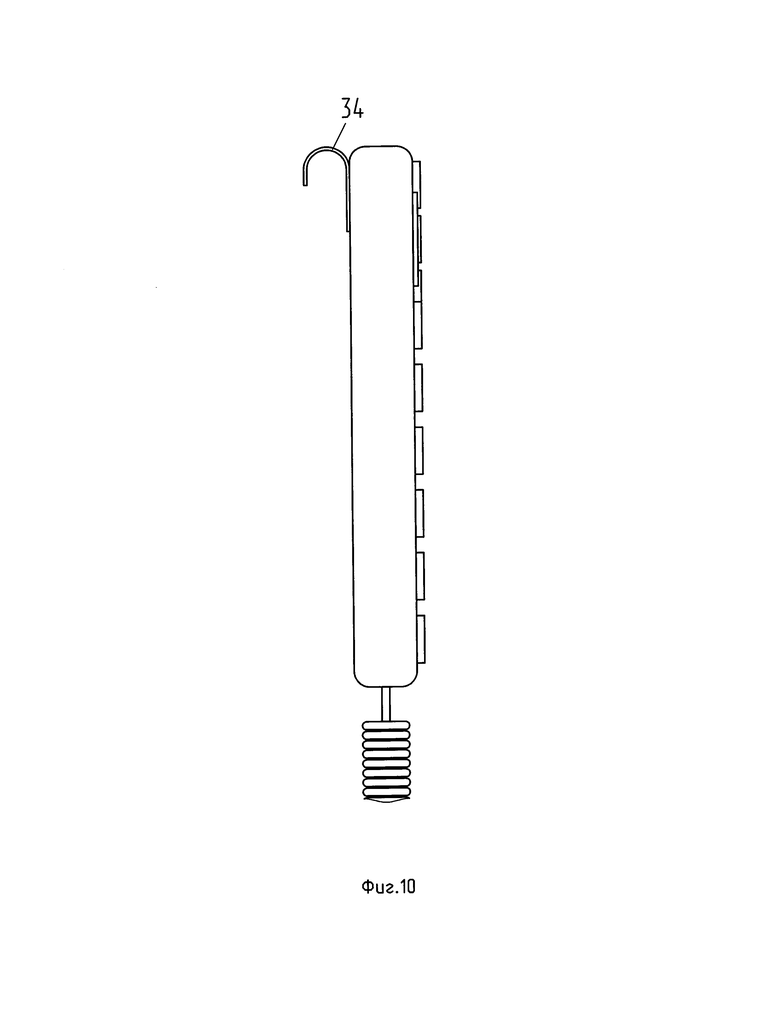
на фиг. 10 - вид пульта управления сбоку, где: 34 - крюк для крепления пульта управления к оградительному борту 2.
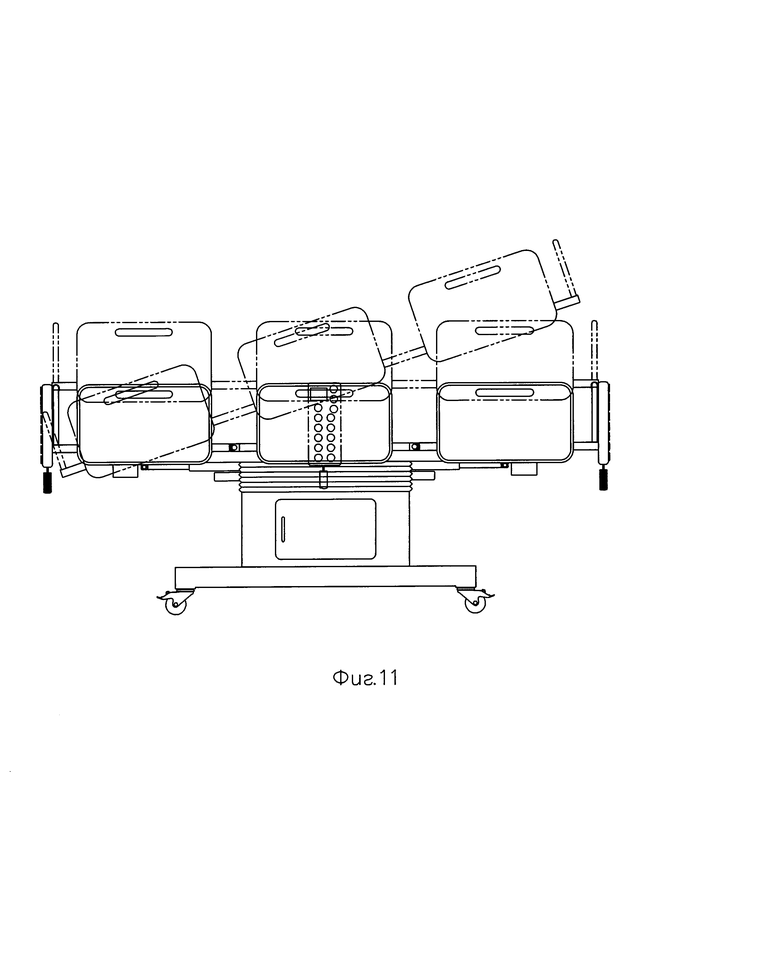
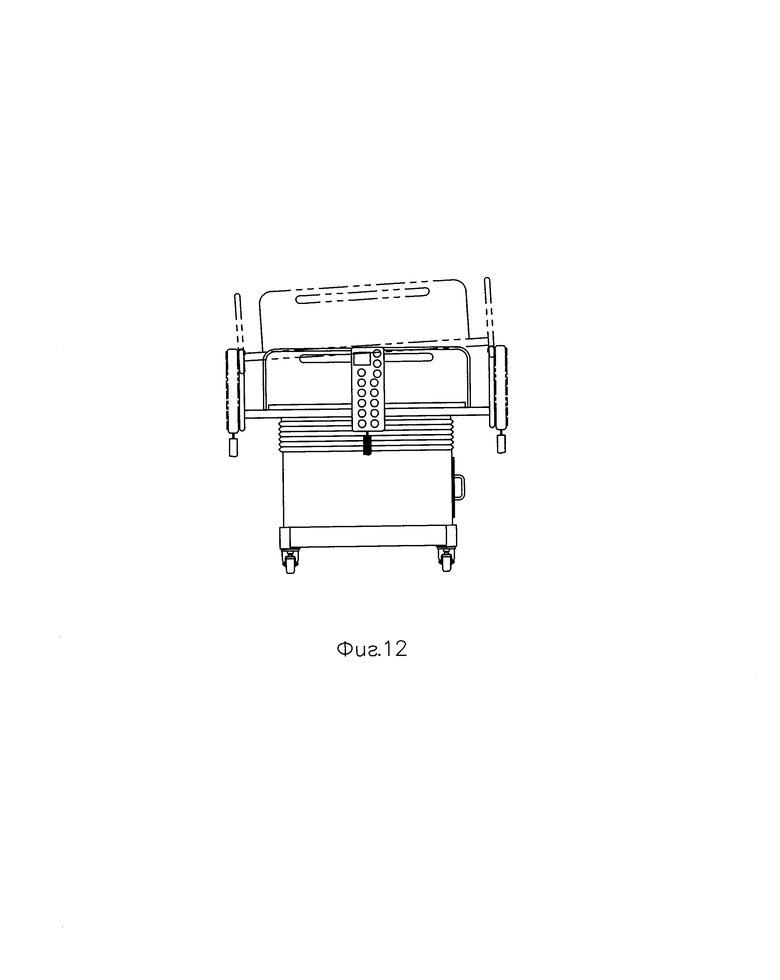
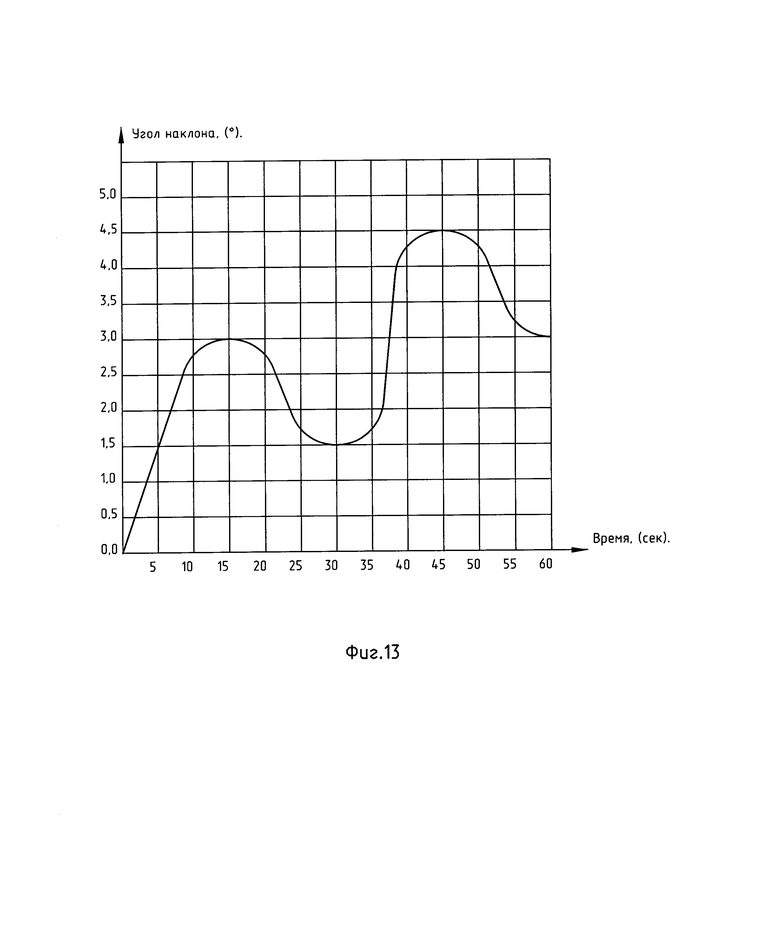
на фиг. 11, 12 - показаны положения устройства в работе (вид сбоку по длинной стороне устройства и вид с торца), где сплошными линиями показано устройство в горизонте, а пунктирными в максимальных углах; на фиг. 13 - представлен график алгоритма низкочастотного воздействия (табл.1);
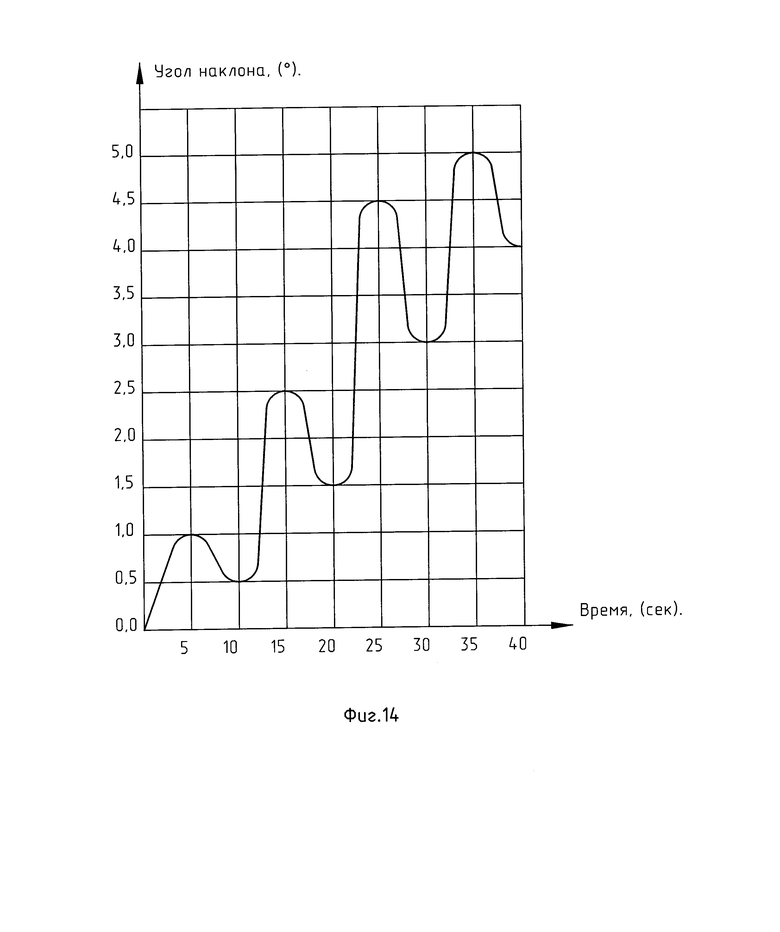
на фиг 14 - представлен график алгоритма с амплитудной модуляцией (табл. 2).
Выбор максимального угла отклонения поверхности для лежания от горизонтального положения (наклона /подъема), различных режимов с амплитудной модуляцией и без нее, суммарного времени непрерывных колебательных воздействий (циклов), а также позиционная фиксация поверхности для лежания позволяют применять способ в соответствии с тяжестью состояния пациента и обеспечивать непрерывное воздействие заданной длительности с достижением эффекта восстановления системного кровотока в микрососудах.
С помощью программного обеспечения способ может реализовывать различные варианты алгоритмов воздействия для достижения лечебного эффекта в зависимости от режима воздействия.
1. В режиме непрерывного возвратно-вращательного движения с частотой гармонических колебаний 0,03 Гц вокруг поперечной оси (табл. 1) используют заданный алгоритм очередности, направления и длительности возвратно-вращательного движения поверхности для лежания вокруг соответствующей оси, задавая при этом суммарное время воздействия и конечный угол наклона. Параметры алгоритма обеспечивают оптимальную эффективность воздействия и переносимость пациентом.
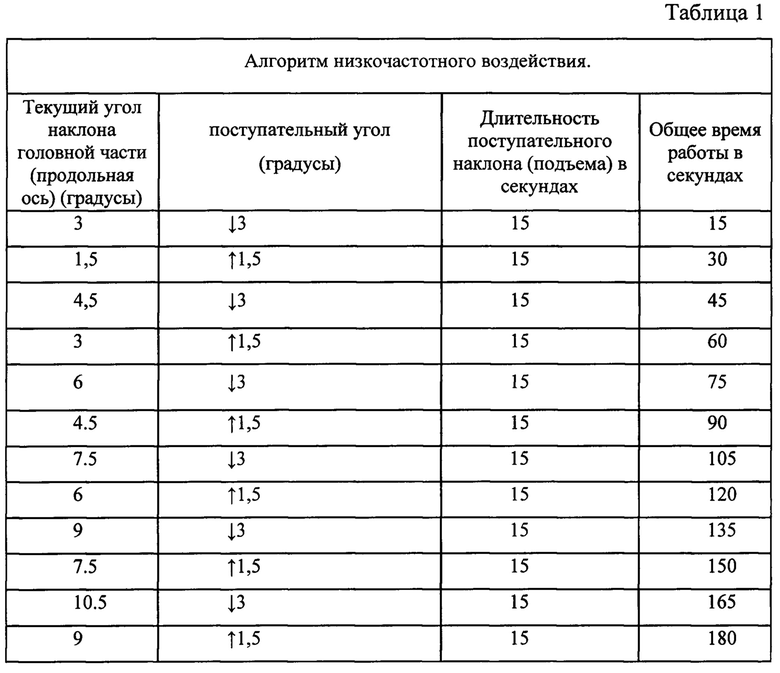
В соответствии с табл.1 аналогично продолжают менять угол наклона головной части до достижения заданного максимального угла, затем следует движения обратно с зеркальным алгоритмом до возвращения в горизонтальное положение.
Условные обозначения в табл.1: ↓ - наклон вниз,↑ - наклон вверх.
2. В режиме непрерывных амплитудно-модулированных колебательных движений используют алгоритм амплитудной модуляции возвратно-колебательных движений с частотой 0,1 Гц с угловым ускорением в первые 2,5 секунды до достижения максимального ускорения к концу 2,5 секунд и последующим замедлением к концу пятой секунды. В конце пятой секунды начинается обратное движение, что в итоге обеспечивает непрерывность и плавность возвратно-вращательного движения
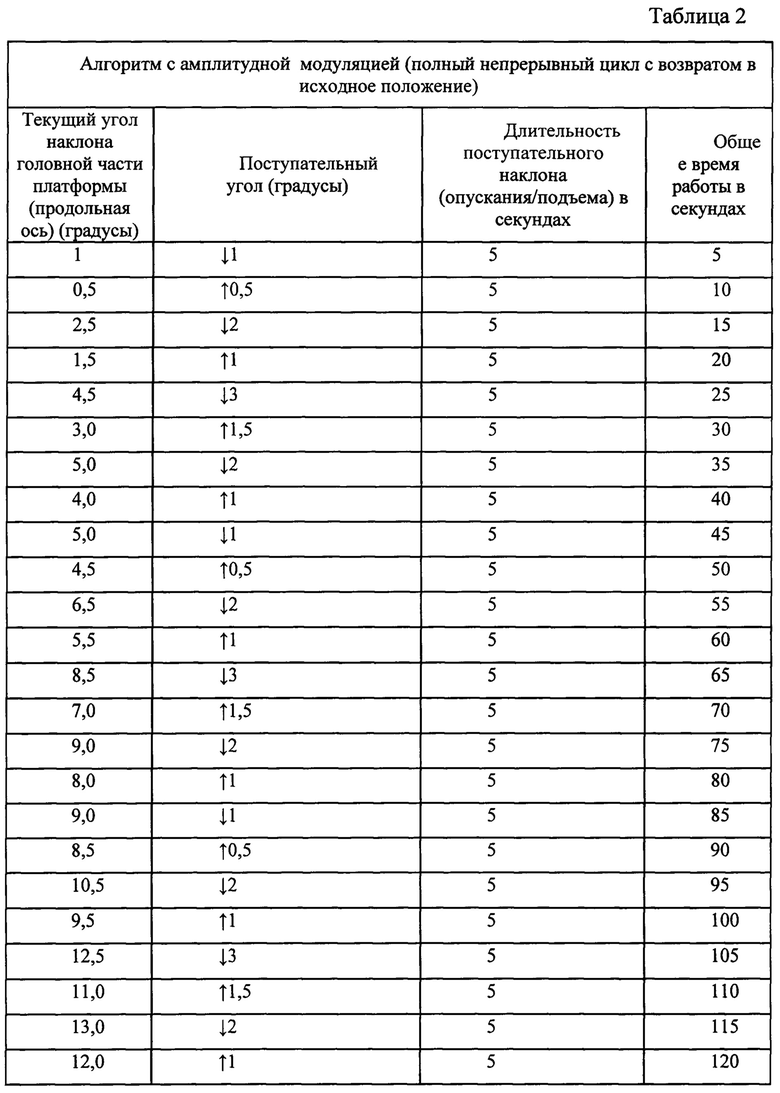
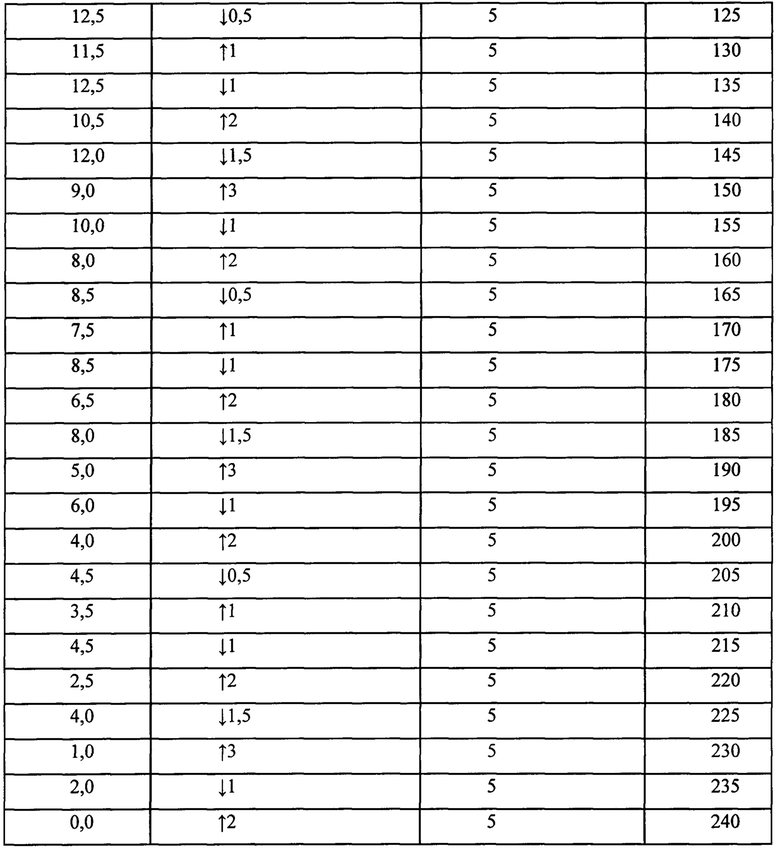
Условные обозначения в табл.2: ↓ - наклон вниз, ↑ - наклон вверх.
Синусоидальный характер изменения скорости наклона поверхности для лежания (Фиг. 14) обеспечивает непрерывность движения.
Способ с помощью устройства позволяет использовать режимы как с конечным углом наклона вниз, так и в режиме вертикализатора (конечный угол подъема вверх). Так же можно сочетать режимы, выстраивая сложные алгоритмы (например: 1 алгоритм «цикл вниз»+1 алгоритм зеркально вверх (вертикализация) и эта последовательность повторяется требуемое количество раз (задается доктором). При этом количество циклов (достижения конечного угла вверх и/или вниз) задается.
Алгоритм с амплитудной модуляцией, а также алгоритм с низкочастотным воздействием (0,03 Гц) может применяться для лечения острых системных нарушений микроциркуляции. Конечный (максимальный) угол тем меньше, чем длительнее требуется непрерывное воздействие.
Для пациентов с тяжелыми системными нарушениями микроциркуляции, с риском отека головного мозга и острой сердечной недостаточности максимальный угол наклона поверхности для лежания не должен превышать 5 градусов, верхняя треть лежачей поверхности должна быть приподнята.
Таким образом, существенными отличиями заявляемого способа от ближайшего аналога являются следующие:
1. Возможность выбора конечного угла отклонения поверхности для лежания (наклона/подъема);
2. Двухчастотное воздействие (0,1 Гц + 0,025 Гц) - режим непрерывных модулированных по амплитуде колебательных движений;
3. Низкочастотное воздействие в диапазоне эндотелий - зависимых колебаний микрокровотока (0.03 Гц)
4. Возможность длительного непрерывного воздействия;
5. Возможность длительного пребывания пациента на поверхности для лежания с изменением позиции головной и голеностопной секций поверхности при необходимости за счет наличия позиционных электродвигателей.
Указанный выше технический результат достигается также в устройстве для осуществления способа лечения нарушений системного кровотока в микрососудах, включающем поверхность для лежания пациента с управляемым двигателем, отличающемся тем, что поверхность для лежания состоит из трех одинаковых секций, включая головную, тазобедренную и голеностопную относительно размещения пациента, соединенные между собой с возможностью независимых изменений и фиксации позиций головной и голеностопной секций, при этом функции головной и голеностопной секций взаимозаменяемы в зависимости от направления расположения пациента, с обратной стороны поверхности для лежания закреплены два управляемых электрических двигателя для независимой позиционной фиксации головной и голеностопной секций, поверхность для лежания по всему периметру снабжена бортовыми ограничителями с возможностью их подъема и опускания и закреплена на подвижном основании с колесами, снабженными стопорами, в центральной части которого установлены по периметру квадрата четыре гидроэлектродвигателя с шаровыми опорами, с помощью которых гидроэлектродвигатели зафиксированы на раме, закрепленной с обратной стороны поверхности для лежания, в центре между гидроэлектродвигателями на основании установлен блок со встроенным программным управлением с заданным алгоритмом непрерывного лечебного воздействия колебательных движений в выбранном режиме, гидроэлектродвигатели по внешнему периметру занимаемой ими площади в центральной части основания закрыты защитным блоком по всей высоте от основания устройства до обратной стороны поверхности для лежания, защитный блок выполнен в виде короба из металлических пластин, заканчивающихся в верхней части прорезиненной ширмой, на уровне металлических пластин выполнена дополнительная фиксация к ним гидроэлектродвигателей, устройство имеет два идентичных пульта управления, размещенные как в головной, так и голеностопной секциях, с учетом направления размещения пациента со стороны оператора; через пульт управления осуществляют включение и выключение устройства, старт программного управления устройством, реверс с последующим продолжением выбранного режима, возврат в начальное положение без продолжения выбранного режима, выбор параметров режима.
Устройство работает с реализацией заявляемого способа следующим образом.
На пульте управления устройством нажимают кнопку 33, загорается красный индикатор 32, устройство включено в сеть и готово к работе. При помощи гироскопа и акселерометра устройство автоматически калибруется и находит горизонт в реальном времени, то есть поверхность для лежания выравнивается в горизонт. Эта последовательность действий устройства выполняется каждый раз при включении устройства в сеть.
Далее кнопками 19 и 20 выбирают высоту секций поверхности для лежания относительно горизонта для удобства укладывания пациента на поверхность для лежания. Далее кнопкой 27 выбирается нужный параметр на экране 18. Начальный параметр - это выставляемый угол, потом количество циклов, время прохождения процедуры, выбор алгоритма. После выбранного параметра его при помощи кнопок 25 и 26 увеличивают или уменьшают. Далее для удобства пациента и требований показаний выставляют режимы 21, 22, 23, 24. Путем нажатия кнопок 21, 22, 23, 24 и удержания их боковые секции выставляются до необходимого угла наклона. Далее путем нажатия кнопок 30 или 31 запускают ранее выбранный алгоритм либо вверх 30, либо вниз 31.
Устройство начало работу. В случае если все идет по заранее намеченному плану, пациент находится на поверхности до окончания процедур. Если необходимо вернуть поверхность для лежания в горизонт, с соблюдением алгоритма нажимают на кнопку реверс 29. Если нужно экстренно вернуть поверхность для лежания в горизонт нажимают на кнопку 28.
По окончании работы устройство отключают от сети кнопкой 33. Подвешивают пульт на оградительный борт с удобного торца при помощи крюка 34.
В данном устройстве два пульта управления с двух торцов. Это сделано для удобства пациента и медперсонала. В данном случае реализован принцип взаимозаменяемости боковых секций (торцов) поверхности для лежания: не имеет значения, как лежит пациент на поверхности для лежания относительно торцов устройства.
Программное обеспечение устройства, встроенное в блок управления, позволяет с помощью соответствующих кнопок задавать следующие параметры лечебного воздействия:
- максимальный угол наклона поверхности для лежания 18,5°;
- максимальный угол подъема поверхности для лежания 18,5°;
- выбор режима воздействия с амплитудной модуляцией или без нее;
- количество непрерывных циклов до достижения заданных максимальных углов наклона.
- реверсный возврат в исходное положение с сохранением заданного алгоритма;
- экстренный возврат без сохранения заданного алгоритма лечебного воздействия.
Пациента укладывают на поверхность для лежания 1, закрытую матрасом, в продольном направлении, комфортном для пациента и оператора (врача). Высоту поверхности для лежания, положение ее головной и голеностопной секций позиционируют в зависимости от состояния пациента при помощи соответствующих электродвигателей.
В меню на пульте управления выбирают алгоритм низкочастотный без модуляции (0,03 Гц) или с частотой 0,1 Гц, модулированный по амплитуде, максимальный угол наклона головного конца, максимальный угол подъема головного конца, количество циклов непрерывной работы. При помощи кнопки «пуск» запускают начало работы устройства. При необходимости досрочного прекращения работы с сохранением алгоритма нажимают кнопку «реверс». При необходимости срочного возврата в исходное положение простым наклоном или подъемом нажимают кнопку «возврат».
Алгоритм с амплитудной модуляцией и алгоритм низкочастотного воздействия могут применяться для лечения острых и хронических системных нарушений микроциркуляции. Конечный (максимальный) угол наклона тем меньше, чем длительнее требуется непрерывное воздействие.
Режим с опусканием в сторону головного конца у пациентов с тяжелыми системными нарушениями микроциркуляции, с риском отека головного мозга и острой сердечной недостаточности может применяться только с максимальным углом наклона не более 5 градусов и с поднятой верхней третью лежачей поверхности.
Программное обеспечение позволяет сочетать режимы, выстраивая сложные алгоритмы (например: 1 алгоритм «цикл вниз»+1 алгоритм зеркально вверх и эта последовательность повторяется требуемое количество раз (задается доктором). При этом количество циклов наклона вверх и вниз и их последовательность задается. Наклон головного конца вверх (режим вертикализации)-это те же циклы, только с подъемом головного конца (зеркальный цикл), плюс сочетанное двойное воздействие.
Для изготовления металлоконструкции и дополнительных аксессуаров используют высококачественные материалы: стальной уголок, листовую нержавеющую сталь, поворотные колеса со стопором, электрогидравлические двигатели замкнутого цикла, линейные электрические актуаторы, высокопрочный диэлектрический пластик, стальные трубы, полосовую сталь разного сечения. Кронштейны для крепления линейных электрических актуаторов, шаровые опоры, болты различного размера для крепления составляющих конструкции.
Заявленное устройство относится к классу II электрической безопасности медицинских изделий.
Максимальные габариты устройства: по длине 2050 см с учетом выступающих пультов управления, подвешенных на оградительные борта обоих торцов, по ширине-1050 см с учетом бортов. Максимальная высота подъема при максимальном угле -1600 см. Максимальный угол отклонения поперечной оси 3° вправо и влево.
Достижение указанного выше технического результата при осуществлении способа с помощью устройства подтверждается следующими клиническими примерами.
Пример 1. Пациент В. 68 лет, с острыми системными нарушениями микроциркуляции на фоне абдоминального сепсиса. При витальной капилляроскопии выявлено снижение плотности капиллярной сети до 5-6 капиллярных петель в 1 мм, при выполнении окклюзионной пробы методом лазерной допплеровской флоуметрии выявлено отсутствие постишемической гиперемии в виде снижения среднего показателя микроциркуляции постокклюзионного кровотока. Базовое положение пациента-на спине, с приподнятой верхней третью (головной секцией) лежачей поверхности на 10 градусов. Для лечебного воздействия выбран режим с амплитудной модуляцией: выбран максимальный угол наклона 5 градусов, максимальный угол подъема составил 5 градусов, общее количество циклов (повторений) -50. Данное воздействие применялось 2 раза в сутки в течение трех дней, в качестве дополнения к основной терапии. На третьи сутки выполнялось повторное исследование. При витальной капилляроскопии ногтевого ложа кисти выявлено увеличение плотности капиллярной сети до 8-9 капилляров в 1 мм. По результатам окклюзионной пробы, выполненной методом лазерной допплеровской флоуметрии, выявлено увеличение среднего показателя микроциркуляции постокклюзионного кровотока.
Пример 2. Пациент А. 57 лет, с хроническими системными нарушениями микроциркуляции на фоне артериальной гипертензии, сахарного диабета. При витальной капилляроскопии выявлено преобладание деформированных капиллярных петель, определялись единичные участки экстравазации, при выполнении окклюзионной пробы методом лазерной допплеровской флоуметрии выявлено снижение максимального прироста кровотока, он составил 127% от исходного среднего показателя микроциркуляции, снижение среднего показателя микроциркуляции постокклюзионного кровотока, он составил 105% от среднего показателя микроциркуляции исходного кровотока. Базовое положение пациента - на правом боку, положение лежачей поверхности - горизонтальное, приподнята верхняя треть (головная секция) на 10 градусов. Для лечебного воздействия выбран режим низкочастотного воздействия (0,03 Гц), максимальный угол наклона - 15 градусов, максимальный угол наклона составил 15 градусов, общее количество повторений - 4, что составило 40 минут непрерывной работы. Данное воздействие применялось 1 раз в сутки в течение восьми дней. По окончании курса выполнялось повторное исследование. При витальной капилляроскопии ногтевого ложа кисти участков экстравазации не выявлено. По результатам окклюзионной пробы, выполненной методом лазерной допплеровской флоуметрии, выявлено увеличение среднего показателя микроциркуляции постокклюзионного кровотока до 122% от исходного среднего показателя микроциркуляции, увеличение максимального прироста кровотока до 226% от исходного среднего показателя микроциркуляции.
Способ и устройство использованы в комплексном лечении нарушений системного кровотока в микрососудах на 30 пациентах. Во всех случаях был достигнут лечебный эффект, подтвержденный увеличением показателя микроциркуляции.
Способ и устройство повышают эффективность воздействия за счет дополнительных режимов лечебного алгоритма, дают возможность размещения пациента в положении, отвечающем тяжести его состояния, без необходимости фиксации, позволяют осуществить выбор режима воздействия, управлять длительностью воздействия в заданном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для дозированной противофазной пневмокомпрессии стоп ног и кистей рук человека | 2018 |
|
RU2700493C1 |
| Устройство и способ лечебного воздействия на кожу головы | 2017 |
|
RU2698449C2 |
| Тренажер для улучшения микроциркуляции крови человека | 2017 |
|
RU2657375C1 |
| Электропневматическое устройство для улучшения системной микроциркуляции | 2023 |
|
RU2819708C1 |
| СПОСОБ ЛЕЧЕНИЯ И ПРОФИЛАКТИКИ ЗАБОЛЕВАНИЙ НЕВРОЛОГИЧЕСКОГО, КАРДИОЛОГИЧЕСКОГО И ТЕРАПЕВТИЧЕСКОГО ПРОФИЛЕЙ | 2013 |
|
RU2545444C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПЕВТИЧЕСКОГО ОЗДОРОВЛЕНИЯ ЧЕЛОВЕКА | 2012 |
|
RU2519975C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ СОСТОЯНИЯ АРТЕРИАЛЬНОГО РУСЛА | 2019 |
|
RU2731414C1 |
| СПОСОБ СОЧЕТАННОГО ПРИМЕНЕНИЯ ЭНДОМАССАЖА И МАГНИТНОГО ПОЛЯ ДЛЯ ВОССТАНОВЛЕНИЯ И РЕАБИЛИТАЦИИ СПОРТСМЕНОВ | 2019 |
|
RU2717196C1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТЕЙ С ПОСЛЕДСТВИЯМИ ТРАВМЫ ВЕРХНИХ И НИЖНИХ КОНЕЧНОСТЕЙ | 2013 |
|
RU2543286C1 |
| МЕХАНОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА ДЛЯ МАССАЖА И ГРАВИТАЦИОННОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2012 |
|
RU2512959C1 |
Группа изобретений относится к области медицины и медицинской техники. Способ лечения нарушений системного кровотока в микрососудах включает воздействие колебательных движений плоской поверхности с лежащим на ней пациентом. Согласно способу используют поверхность для лежания, состоящую из трех секций с независимой позиционной фиксацией и снабженной функцией передачи непрерывного лечебного воздействия колебательных движений в двух режимах. Первый режим непрерывного возвратно-вращательного движения вокруг поперечной оси поверхности для лежания с частотой гармонических колебаний 0,03 Гц с заданным алгоритмом очередности движения, с задаваемыми оператором длительностью и углом отклонения плоской поверхности от горизонтального положения, при этом максимальный угол отклонения продольной оси составляет 18,5 градусов, время непрерывной работы не более 24 часов. Второй режим непрерывных модулированных по амплитуде колебательных движений с частотой 0,1 + 0,025 Гц, задаваемых путем непрерывного циклического возвратно-вращательного движения вокруг поперечной оси с ускорением в течение 2,5 секунд до достижения максимальной скорости с последующим замедлением к концу пятой секунды и одновременным началом нового цикла возвратно-вращательного движения вокруг поперечной оси до заданного угла отклонения продольной оси, длительность непрерывного движения задают количеством непрерывных циклов, суммарное время непрерывной работы не более 24 часов, максимальный угол отклонения продольной оси составляет18,5 градусов. Раскрыто устройство для лечения нарушений системного кровотока в микрососудах. Технический результат состоит в повышении эффективности лечебного воздействия за счет непрерывности и дополнительных режимов. 2 н.п. ф-лы, 14 ил., 2 табл.
1. Способ лечения нарушений системного кровотока в микрососудах, включающий лечебное воздействие колебательных движений плоской поверхности с лежащим на ней пациентом, отличающийся тем, что
используют поверхность для лежания, состоящую из трех секций с независимой позиционной фиксацией и снабженной функцией передачи непрерывного лечебного воздействия колебательных движений в двух режимах:
- режиме непрерывного возвратно-вращательного движения вокруг поперечной оси поверхности для лежания с частотой гармонических колебаний 0,03 Гц с заданным алгоритмом очередности движения, с задаваемыми оператором длительностью и углом отклонения плоской поверхности от горизонтального положения, при этом максимальный угол отклонения продольной оси составляет 18,5 градусов, время непрерывной работы не более 24 часов,
- режиме непрерывных модулированных по амплитуде колебательных движений с частотой 0,1 + 0,025 Гц, задаваемых путем непрерывного циклического возвратно-вращательного движения вокруг поперечной оси с ускорением в течение 2,5 секунд до достижения максимальной скорости с последующим замедлением к концу пятой секунды и одновременным началом нового цикла возвратно-вращательного движения вокруг поперечной оси до заданного угла отклонения продольной оси, длительность непрерывного движения задают количеством непрерывных циклов, суммарное время непрерывной работы не более 24 часов, максимальный угол отклонения продольной оси составляет 18,5 градусов.
2. Устройство для лечения нарушений системного кровотока в микрососудах, включающее поверхность для лежания пациента с управляемым двигателем, отличающееся тем, что поверхность для лежания состоит из трех одинаковых секций - головной, тазобедренной и голеностопной, соединенных между собой с возможностью независимых изменений и фиксации позиций головной и голеностопной секций, при этом функции головной и голеностопной секций взаимозаменяемы, с обратной стороны поверхности для лежания закреплены два управляемых электрических двигателя для независимой позиционной фиксации головной и голеностопной секций, поверхность для лежания по всему периметру снабжена бортовыми ограничителями с возможностью их подъема и опускания и закреплена на подвижном основании с колесами, снабженными стопорами, в центральной части основания по периметру квадрата установлены четыре гидроэлектродвигателя с шаровыми опорами для фиксации гидроэлектродвигателей на раме, закрепленной с обратной стороны поверхности для лежания, на основании в центре между гидроэлектродвигателями установлен блок со встроенным программным управлением, гидроэлектродвигатели по внешнему периметру занимаемой ими площади закрыты защитным блоком по всей высоте от основания устройства до обратной стороны поверхности для лежания, защитный блок выполнен в виде короба из металлических пластин, заканчивающихся в верхней части прорезиненной ширмой, гидроэлектродвигатели дополнительно фиксированы к металлическим пластинам, устройство имеет два идентичных пульта управления, размещенных на головной и голеностопной секциях, выполненных с возможностью включения и выключения устройства, старта программного управления, реверса с продолжением выбранного режима, возврата в начальное положение без продолжения выбранного режима, выбора параметров режима.
| СПОСОБ ЛЕЧЕНИЯ И ПРОФИЛАКТИКИ ЗАБОЛЕВАНИЙ НЕВРОЛОГИЧЕСКОГО, КАРДИОЛОГИЧЕСКОГО И ТЕРАПЕВТИЧЕСКОГО ПРОФИЛЕЙ | 2013 |
|
RU2545444C1 |
| Тренажер для улучшения микроциркуляции крови человека | 2017 |
|
RU2657375C1 |
| Многофункциональная кровать | 2018 |
|
RU2692898C1 |
| ФУНКЦИОНАЛЬНАЯ КРОВАТЬ | 2002 |
|
RU2231348C1 |
| CN 101836928 A, 22.09.2010 | |||
| CN 201668661 U, 15.12.2010. | |||

