Изобретение относится к медицинской технике, а более конкретно - к средствам для механотерапии, и может быть использовано для вытяжения позвоночника и суставов конечностей, а также для вибромеханического массажа околопозвоночных мышц и связок.
Установление предшествующего уровня техники.
На основе анализа материалов фонда патентной и другой медико-технической литературы заявителем установлено следующее.
Виды лечебного воздействия на позвоночник и околопозвоночные мышцы и связки известны и широко применяются в отечественной и зарубежной медицинской практике: ручной и механический (аппаратный) массаж, вытяжение (тракция), вибрация (вибромассаж и вибровытяжение), магнито- и электротерапия, тепловое облучение и т.д. Наиболее распространенными среди них являются механический (вибромеханический) массаж и вытяжение.
Краткая характеристика основных видов лечебного и лечебно-механического воздействия на позвоночник и суставы.
Массаж - комплекс приемов лечебно-механического дозированного воздействия на позвоночник и околопозвоночные мышцы и связки в виде давления, вибрации, трения, поглаживания и т.п. Он может использоваться как самостоятельный вид лечебного воздействия, так и применяться в сочетании с другими методами лечения (например, с вибрацией или вытяжением). Очень часто массаж используется как воздействие, предшествующее вытяжению.
Вибрация - воздействие, предназначенное для повышения лечебного эффекта механического массажа или вытяжения и реализуется с помощью вибраторов, перемещаемых вручную, или путем использования специальных источников вибрации, встроенных в автоматизированные средства для массажа или вытяжения позвоночника.
Вытяжение - метод лечения и профилактики с заболеваний позвоночника путем формирования тяговых усилий вдоль его оси или под некоторьм углом к ней. В основе лечения чаще всего лежит принятие мер по его удлинению с целью разгрузки нервных окончаний, восстановления межпозвонковых дисков и коррекции взаимного положения позвонков.
Теплотерапия. В ряде случаев указанным выше видам механотерапии предшествует теплотерапия. Она предназначена для тепловой релаксации околопозвоночных мышц и связок и может осуществляться как за счет «внутреннего» тепла, например, путем выполнения гимнастических упражнений, так и за счет внешнего теплового облучения (прогрев нагретым воздушным потоком, тепловыми элементами, вмонтированными в средства для механотерапии и т.п.). Благодаря предварительному тепловому воздействию на спину пациента облегчается механический массаж ее мышц и связок и вытяжение самого позвоночника.
Механотерапия - словосочетание, состоящее из слов «механо», т.е. относящееся к механике, и «терапия» - лечение. При механотерапии осуществляется лечебное и тренировочное воздействие на позвоночник, его костно-суставные элементы и околопозвоночные мышцы и связки. Такое воздействие способствует, например, профилактике искривления позвоночника, улучшению подвижности его звеньев, предупреждению таких заболеваний, как лордоз, кифоз, сколиоз, различных видов нарушения осанки.
К настоящему времени известны механотерапевтические установки для массажа и вытяжения позвоночника, при использовании которых пациент во время лечебной процедуры находится в горизонтальном (ортостатическом) положении, а для вытяжения используются внешние горизонтальные искусственные силы [1,2].
Практика использования средств для вытяжения показала, что более физиологичным является наклонно-гравитационный вид экстензии, когда для вытяжения позвоночника и суставов используется сила тяжести (вес) собственного тела пациента, к чему его ткани адаптированы [3]. Пациента размещают на специальном столе, который может наклоняться под определенным углом к горизонту вплоть до 90°, когда пациент занимает уже так называемое анти-ортостатическое положение. При наклонной экстензии вытяжение осуществляется под действием силы гравитации, равной, а чаще всего, меньшей веса тела пациента, что сводит возможность осложнений во время процедуры до минимума. Кроме того, путем изменения угла наклона возможно постепенное (дозированное) изменение силы вытяжения.
Механотерапевтические установки для наклонно-гравитационного вытяжения делятся на две большие группы:
а) установки, у которых центр тяжести стола и ось его наклона (поворота) лежат приблизительно на одной вертикальной плоскости [4-12];
б) установки, у которых центр тяжести стола и ось его наклона (поворота) лежат на разных (отнесенных друг от друга) вертикальных плоскостях [13-15].
Особенностью установок первой группы является то, что их конструкция требует для наклона размещение оси наклона стола на относительно большом расстоянии от пола (в противном случае стол невозможно будет наклонять на большие углы). Поднятие оси наклона стола существенно снижает устойчивость установки, увеличивает его габариты и усложняет размещение на нем пациента.
У установок второй группы ось наклона стола в большинстве случаев смещена к его торцу, что позволяет наклонять стол на угол до 90° без поднятия его оси на относительно большую высоту.
Известна механотерапевтическая установка для массажа и гравитационного вытяжения позвоночника, содержащая:
- корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена тепловым элементом и приспособлением для фиксации тела пациента,
- размещенные внутри корпуса массажный узел, выполненный в виде платформы с роликами-массажерами, узлы поджатая, возвратно-поступательного перемещения и наклона корпуса и блок программного управления, выходы которого подключены к тепловому элементу и электроприводам узлов поджатая, возвратно-поступательного перемещения и наклона корпуса, при этом:
- корпус размещен одним концом на неподвижных, например резиновых, опорах, а другим концом - на опорной раме, шарнирно соединенной с корпусом и снабженной роликами перемещения по опорной поверхности корпуса,
- кушетка выполнена в виде неподвижной грудной секции, связанной с приспособлением для фиксации тела пациента, и подвижной тазобедренной секции, установленной на роликах и с возможностью возвратно-поступательного перемещения по направляющим,
- узел наклона корпуса выполнен в виде телескопического механизма, первый и второй концы которого шарнирно соединены соответственно с корпусом и опорной рамой,
- на корпусе размещен датчик угла наклона корпуса, вал которого кинематически связан с опорной рамой, а блок программного управления содержит регулятор наклона корпуса, вход и выход которого подключены соответственно к выходу датчика угла наклона корпуса и входу электропривода узла наклона корпуса [13].
Недостатками такой установки являются:
- относительно узкие функциональные возможности;
- относительно малый максимальный угол наклона корпуса (менее 30°), что не позволяет достичь в ряде случаев необходимой силы вытяжения (например, при вытяжении поясничного отдела позвоночника).
Известна также механотерапевтическая установка для мануальной терапии и вытяжения позвоночника, содержащая:
- станину,
- стол, снабженный горизонтальной осью, обеспечивающей возможность наклона стола,
- кушетку, размещенную на столе,
- средства для регулирования угла наклона стола,
- каретку, установленную на направляющих на противоположной стороне кушетки,
- съемный кронштейн с блоком, размещенный на торце кушетки, удаленном от оси его поворота,
- средства для фиксации тела пациента, при этом:
- в кушетке вдоль его боковых сторон выполнены отверстия под фиксирующие ремни,
- на конце кушетки, удаленном от оси поворота, выполнено отверстие под лицо пациента,
- каретка размещена на направляющих с возможностью фиксации ее положения, и в ней выполнены прорези под фиксирующие ремни, на торце кушетки у ее оси поворота размещен второй съемный кронштейн с направляющей, на которой установлен блок с гибкой тягой, связанный с поясничным ремнем, причем блок установлен на направляющих с возможностью перемещения по ширине кушетки [14].
Недостатками данной установки являются:
- относительно узкие функциональные возможности,
- использование дополнительных регулируемых по весу грузов (поз.21),
- неоперативное регулирование веса грузов,
- отсутствие возможности теплового массажа пациента.
Характеристика и критика прототипа.
Наиболее близким изобретением к предлагаемому по наибольшему количеству сходных признаков, технической сущности, схемному решению и достигаемому при использовании результату является механотерапевтическая установка для массажа и гравитационного вытяжения позвоночника, описанная в [15].
Такая установка, выбранная в качестве прототипа, содержит:
- массивную станину,
- стол, снабженный горизонтальной осью, жестко соединенной со столом и шарнирно - со станиной,
- кушетку, размещенную на столе,
- узел наклона стола, содержащий электропривод, закрепленный на станине и кинематически связанный через редуктор с горизонтальной осью стола,
- массажный узел с роликами-массажерами,
- узел перемещения роликов-массажеров с электроприводом,
- узел прижатия роликов-массажеров,
- датчик силы вытяжения, выполненный в виде динамометра,
- тепловые элементы, размещенные на массажном узле,
- блок программного управления, выходы которого подключены к электроприводам узла наклона стола, узла перемещения и тепловому блоку,
- и элементы фиксации пациента с гибкими связями.
Прототип характеризуется следующими недостатками:
а) относительно узкие функциональные возможности;
б) низкая автоматизация лечебных процедур, усложняющих труд врача, оператора (медсестры);
в) отсутствует информация об угле наклона кушетки во время процедуры.
Медико-технические результаты и их достижение.
Изобретение направлено на достижение таких технических результатов, как:
- расширение функциональных возможностей установки;
- обеспечение возможностей проведения на ней более полного комплекса ручного и механического массажа и наклонно-гравитационного вытяжения различных отделов позвоночника и суставов;
- создание для пациентов более комфортных условий при выполнении лечебных процедур, снижение риска травматизма;
- облегчение труда врача, оператора.
Достижение указанных технических результатов обеспечивается тем, что известная механотерапевтическая установка для массажа и гравитационного вытяжения позвоночника, содержащая:
- массивную станину,
- стол, снабженный горизонтальной осью, жестко соединенной с ним, и шарнирно - со станиной,
- кушетку, размещенную на столе,
- узел наклона стола, содержащий электропривод, закрепленный на станине и кинематически связанный через редуктор с горизонтальной осью стола,
- массажный узел с роликами-массажерами,
- узел перемещения роликов-массажеров с электроприводом,
- узел прижатия роликов-массажеров,
- датчик силы вытяжения,
- тепловые элементы,
- элементы фиксации пациента с гибкими связями,
- и блок программного управления, выходы которого подключены к электроприводу узла наклона стола, электроприводу узла перемещения роликов-массажеров и тепловым элементам, содержит также:
- датчик угла наклона стола, выполненный в виде элемента Холла, полупроводниковый преобразователь которого закреплен на корпусе, а постоянный магнит - на валу электропривода узла наклона стола,
- датчик силы давления стоп, выполненный в виде тензодатчика, размещенного на вертикальной платформе, прикрепленной к ножной части стола,
- ограничитель перемещений роликов-массажеров, выполненный на основе кронштейна, жестко соединенного с узлом перемещения, и двух сигнализаторов крайнего положения,
- и выносной пульт управления, соединенный с блоком программного управления, при этом:
- кушетка выполнена многосекционной, каждая из которых снабжена роликами, обеспечивающими возможность перемещения секций по направляющим, прикрепленным к верхней поверхности стола, и фиксаторами положения секций,
- в одной из секций кушетки выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой,
- узел перемещения роликов-массажеров имеет горизонтальную раму, выполненную с возможностью перемещения на роликах по направляющим, прикрепленным к нижней поверхности стола и имеющим С-образное сечение, наклонную раму, одна сторона которой шарнирно соединена с горизонтальной рамой, а другая сторона шарнирно - с массажным узлом, и зубчатый ремень, установленный на двух роликах и обеспечивающий гибкую кинематическую связь между электроприводом узла перемещения роликов-массажеров и горизонтальной рамой,
- узел прижатия роликов-массажеров имеет язычок и гайку, приваренные соответственно к наклонной и горизонтальной рамам узла перемещения роликов-массажеров, вилку, резьбовой участок которой находится в зацеплении с резьбой гайки, и выполненную с возможностью взаимодействия с язычком, и нажимной вал, выполненный с возможностью зацепления с вилкой и снабженный возвратной пружиной и рукояткой,
- датчик силы вытяжения выполнен в виде тензодатчика, размещенного на вертикальной платформе, прикрепленной к головной части стола,
- сигнализаторы крайнего положения выполнены с возможностью регулировки их положения вдоль стола,
- а входы блока программного управления соединены с выходами датчиков угла наклона, силы вытяжения и силы давления стоп и двух сигнализаторов крайнего положения.
Кроме того,
- тепловые элементы выполнены на основе гибкой графитовой ленты, вшитой в накидку кушетки;
- массажный узел выполнен в виде Н-образной тележки, на концах которой размещены ролики-массажеры, и снабжен электровибратором, подключенным к выходу блока программного управления;
- устройство снабжено аварийной кнопкой пациента, соединенной с входом блока программного управления и звуковым сигнализатором, подключенным к выходу блока программного управления;
- кушетка снабжена подголовником и подколенником;
- стол имеет страховочные ремни;
- станина опирается на колеса, снабженные тормозами.
Заявителем не обнаружены установки, в которых технический результат достигнут аналогичной совокупностью существенных признаков. При этом проведенный им анализ уровня техники, включающий поиск по патентным и другим научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах изобретения, позволили установить, что не имеются аналоги, характеризующиеся признаками, идентичными всем существенным признакам изобретения, а выделение из перечня аналогов прототипа [15] выявило совокупность существенных по отношению к техническим результатам отличительных признаков заявленного изобретения.
Другими словами, по имеющимся у заявителя сведениям аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленной установки, отсутствуют.
Заявителем проведена также проверка соответствия указанной совокупности существенных признаков установки трем условиям (критериям) патентоспособности.
Проверка соответствия заявляемой установки условию патентоспособности «Новизна».
Для оценки новизны заявляемого технического решения проанализирована вышеприведенная совокупность существенных признаков заявляемой установки. Для этого выделены признаки заявляемой установки, совпадающие с признаками прототипа.
Установка содержит:
- массивную станину,
- стол, снабженный горизонтальной осью, жестко соединенной с ним, и шарнирно - со станиной,
- кушетку, размещенную на столе,
- узел наклона стола, содержащий электропривод, закрепленный на станине и кинематически связанный через редуктор с горизонтальной осью стола,
- массажный узел с роликами-массажерами,
- узел перемещения роликов-массажеров с электроприводом,
- узел прижатия роликов-массажеров,
- датчик силы вытяжения,
- тепловые элементы,
- элементы фиксации пациента с гибкими связями,
- и блок программного управления, выходы которого подключены к электроприводу узла наклона стола, электроприводу узла перемещения роликов-массажеров и тепловым элементам.
Теперь выделим признаки заявляемой установки, не совпадающие с признаками прототипа:
- датчик угла наклона стола, выполненный в виде элемента Холла, полупроводниковый преобразователь которого закреплен на корпусе, а постоянный магнит - на валу электропривода узла наклона стола,
- датчик силы давления стоп, выполненный в виде тензодатчика, размещенного на вертикальной платформе, прикрепленной к ножной части стола,
- ограничитель перемещений роликов-массажеров, выполненный на основе кронштейна, жестко соединенного с узлом перемещения, и двух сигнализаторов крайнего положения,
- и выносной пульт управления, соединенный с блоком программного управления, причем:
- кушетка выполнена многосекционной, каждая из которых снабжена роликами, обеспечивающими возможность перемещения секций по направляющим, прикрепленным к верхней поверхности стола, и фиксаторами положения секций,
- в одной из секций кушетки выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой,
- узел перемещения роликов-массажеров имеет горизонтальную раму, выполненную с возможностью перемещения на роликах по направляющим, прикрепленным к нижней поверхности стола и имеющим С-образное сечение, наклонную раму, одна сторона которой шарнирно соединена с горизонтальной рамой, а другая сторона шарнирно - с массажным узлом, и зубчатый ремень, установленный на двух роликах и обеспечивающий гибкую кинематическую связь между электроприводом узла перемещения роликов-массажеров и горизонтальной рамой,
- узел прижатия роликов-массажеров имеет язычок и гайку, приваренные соответственно к наклонной и горизонтальной рамам узла перемещения роликов-массажеров, вилку, резьбовой участок которой находится в зацеплении с резьбой гайки, и выполненную с возможностью взаимодействия с язычком, и нажимной вал, выполненный с возможностью зацепления с вилкой и снабженный возвратной пружиной и рукояткой,
- датчик силы вытяжения выполнен в виде тензодатчика, размещенного на вертикальной платформе, прикрепленной к головной части стола,
- сигнализаторы крайнего положения выполнены с возможностью регулировки их положения вдоль стола,
- а входы блока программного управления соединены с выходами датчиков угла наклона, силы вытяжения и силы давления стоп и двух сигнализаторов крайнего положения.
Кроме того:
- тепловые элементы выполнены на основе гибкой графитовой ленты, вшитой в накидку кушетки;
- массажный узел выполнен в виде Н-образной тележки, на концах которой размещены ролики-массажеры, и снабжен электровибратором, подключенным к выходу блока программного управления;
- устройство снабжено аварийной кнопкой пациента, соединенной с входом блока программного управления и звуковым сигнализатором, подключенным к выходу блока программного управления;
- кушетка снабжена подголовником и подколенником;
- стол имеет страховочные ремни;
- станина опирается на колеса, снабженные тормозами.
Наличие данных признаков обеспечивает соответствие всей совокупности признаков условию патентоспособности «новизна». При этом не обнаружены устройства, в которых технический результат достигнут аналогичной совокупностью существенных признаков.
Проверка соответствия заявляемой установки условию патентоспособности «изобретательский уровень».
Для проверки соответствия требованию изобретательского уровня заявителем проведен дополнительный поиск и анализ решений по патентной и другой научно-технической и медико-технической литературе. При этом не выявлены установки аналогичного назначения с признаками, сходными с отличительными признаками заявленного объекта. Совокупность его признаков не является очевидной из уровня техники, на основании чего был сделан вывод о том, что предлагаемый объект соответствует условию патентоспособности «изобретательский уровень» по действующему законодательству.
При этом следует отметить, что между совокупностью существенных признаков настоящего изобретения и достигаемым техническим результатом существует причинно-следственная связь, поскольку указанный технический результат достигается лишь при совместном использовании всех без исключения известных и отличительных признаков.
Настоящее изобретение поясняется конкретным примером исполнения, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения требуемого технического результата.
Сущность изобретения.
Сущность изобретения поясняется чертежами, представленными на фиг.1-20, где:
- на фиг.1 - вид установки спереди (без пациента);
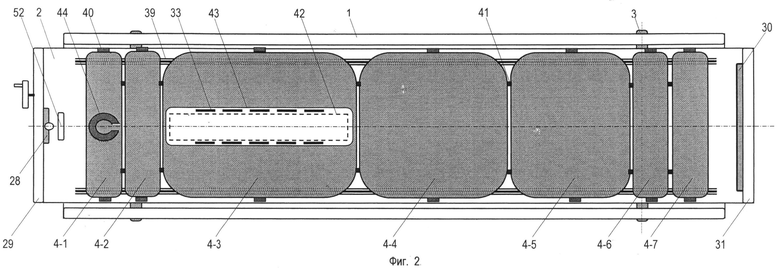
- на фиг.2 - вид кушетки установки сверху;
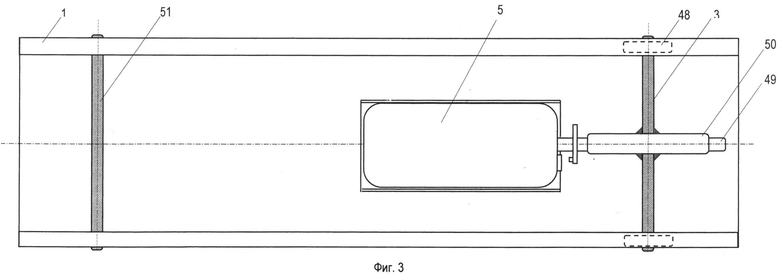
- на фиг.3 - вид станины установки сверху;
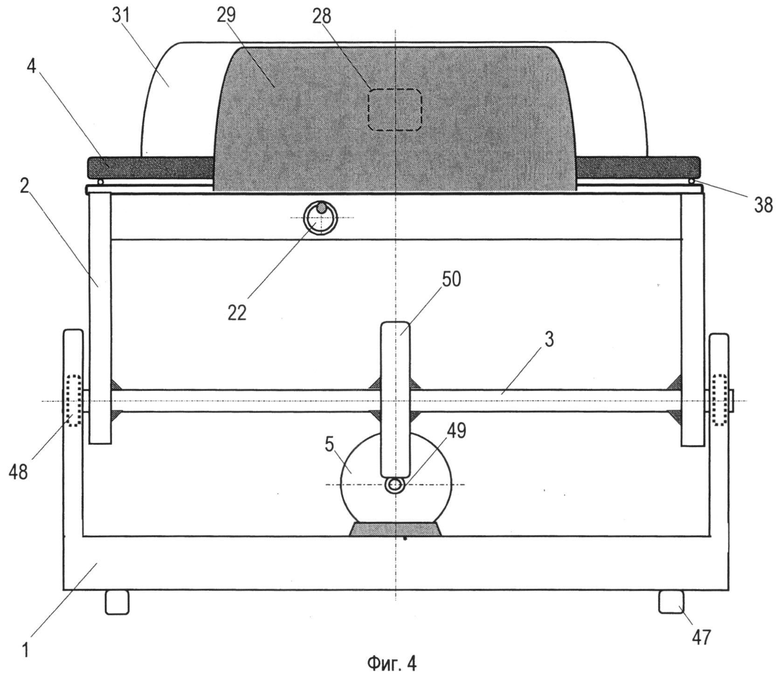
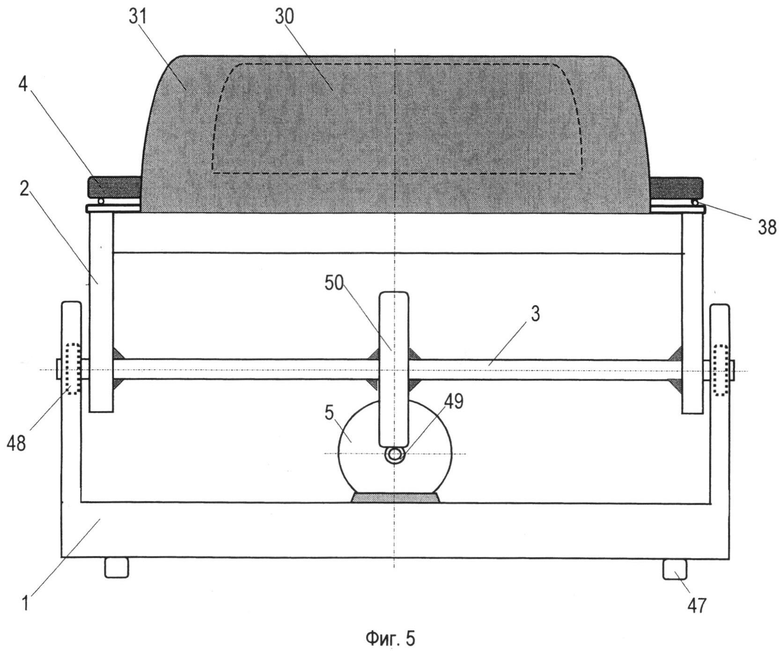
- на фиг.4 и 5 - виды установки с торцов (слева и справа);
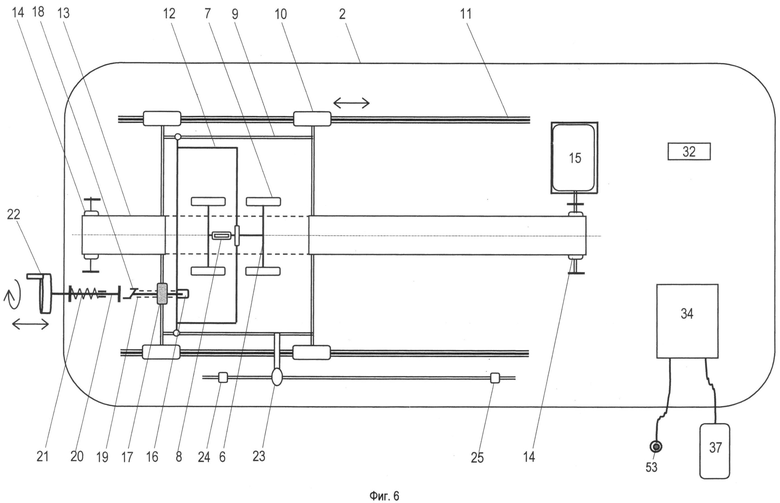
- на фиг.6 - вид стола установки снизу;
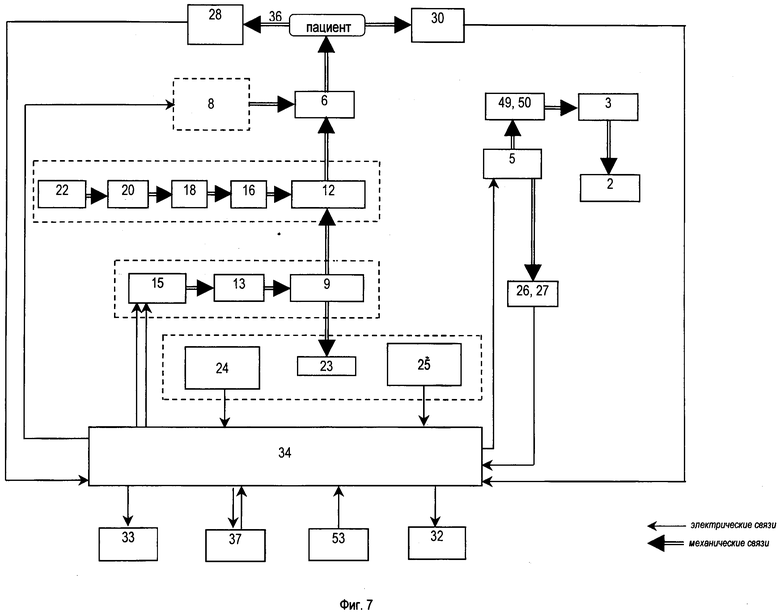
- на фиг.7 - структурная схема установки;
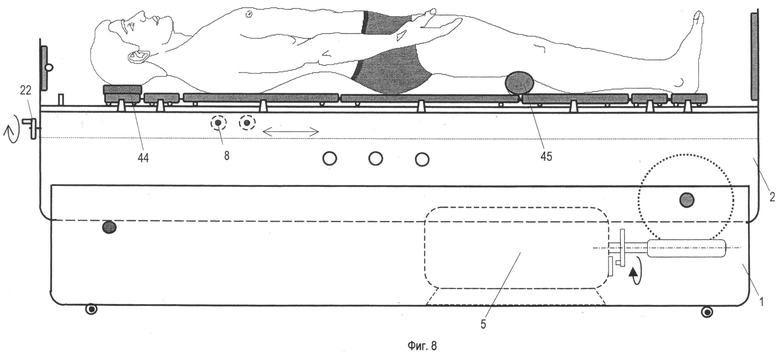
- на фиг.8 - механический (вибромеханический) массаж околопозвоночных мышц и связок;
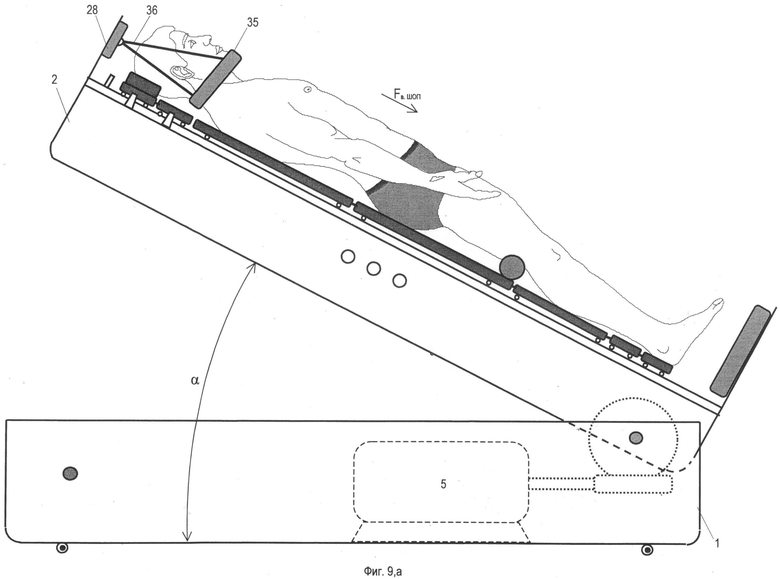
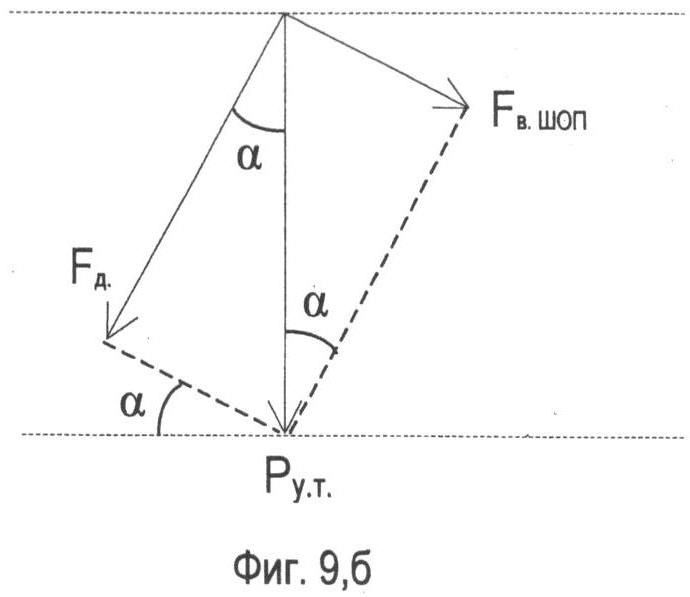
- на фиг.9 - вытяжение шейного отдела позвоночника (ШОП) в положении «головой вверх»;
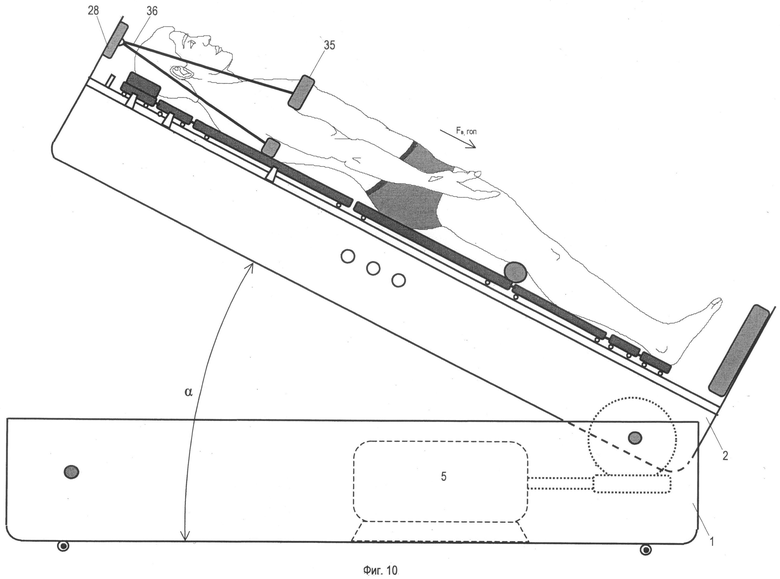
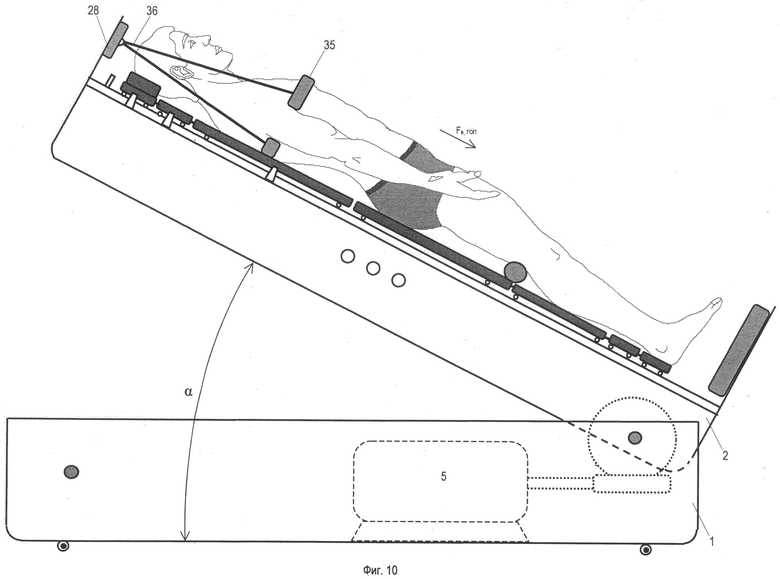
- на фиг.10 - вытяжение грудного отдела позвоночника (ГОП) в положении «головой вверх»;
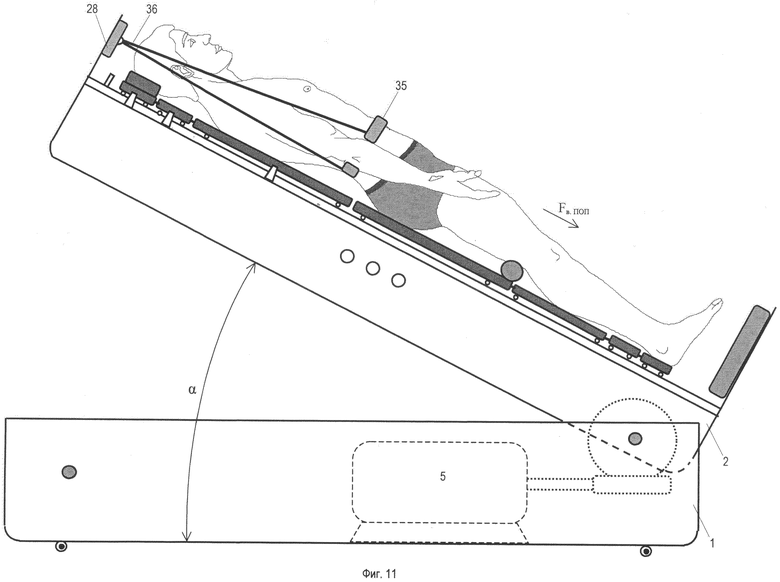
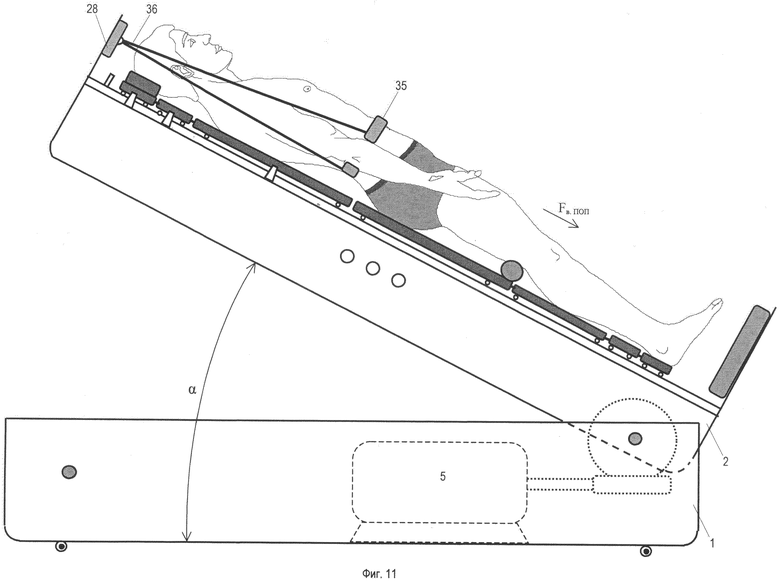
- на фиг.11 - вытяжение поясничного отдела позвоночника (ПОП) в положении «головой вверх»;
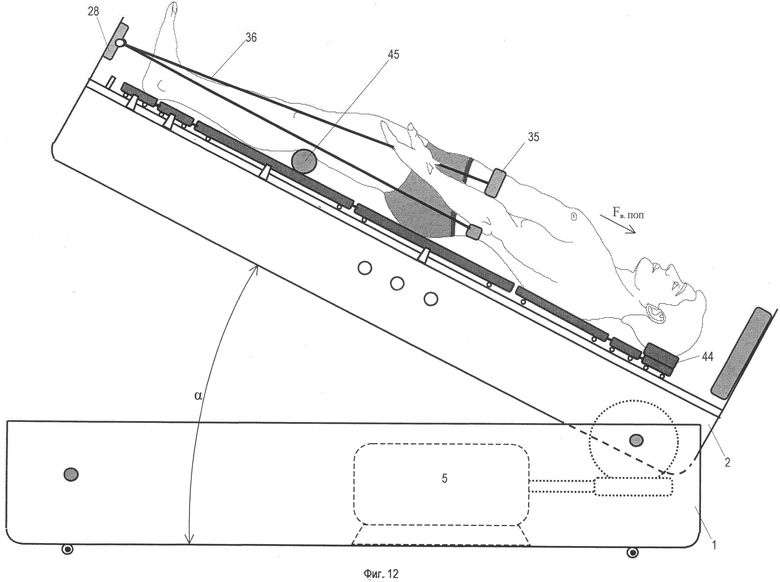
- на фиг.12 - вытяжение поясничного отдела позвоночника (ПОП) в положении «головой вниз»;
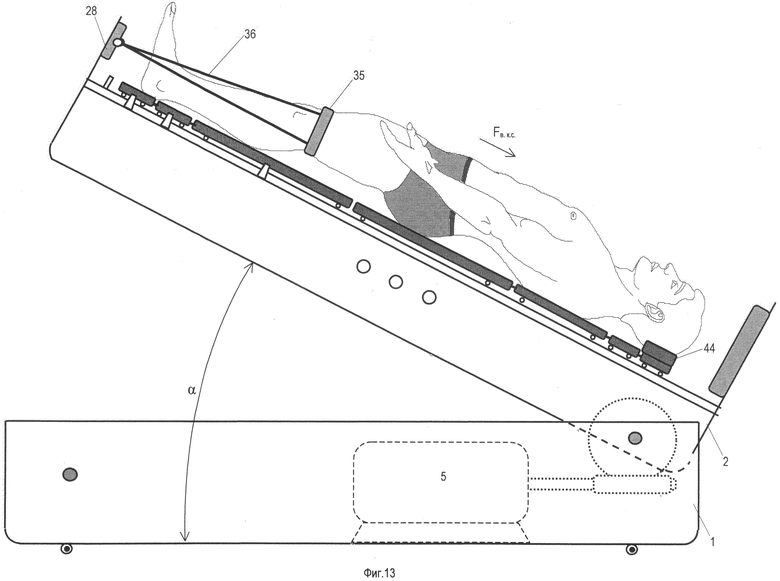
- на фиг.13 - вытяжение коленного сустава (КС);
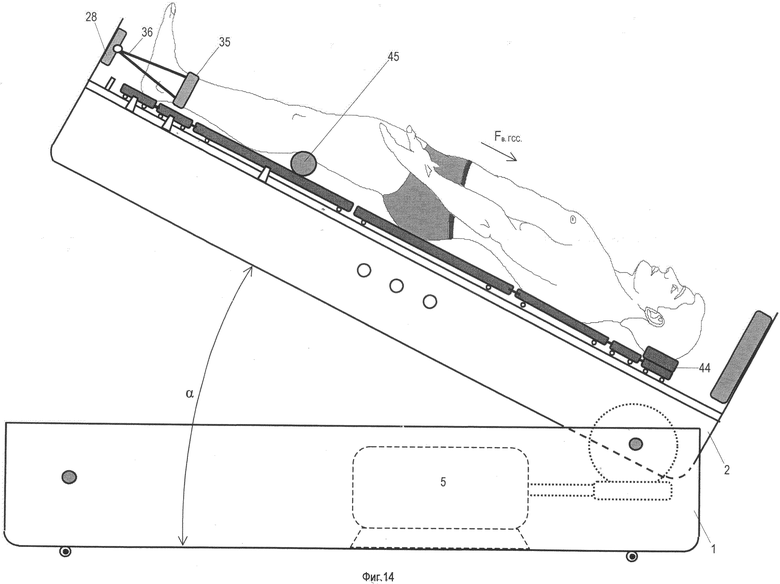
- на фиг.14 - вытяжение голеностопного сустава (ГС);
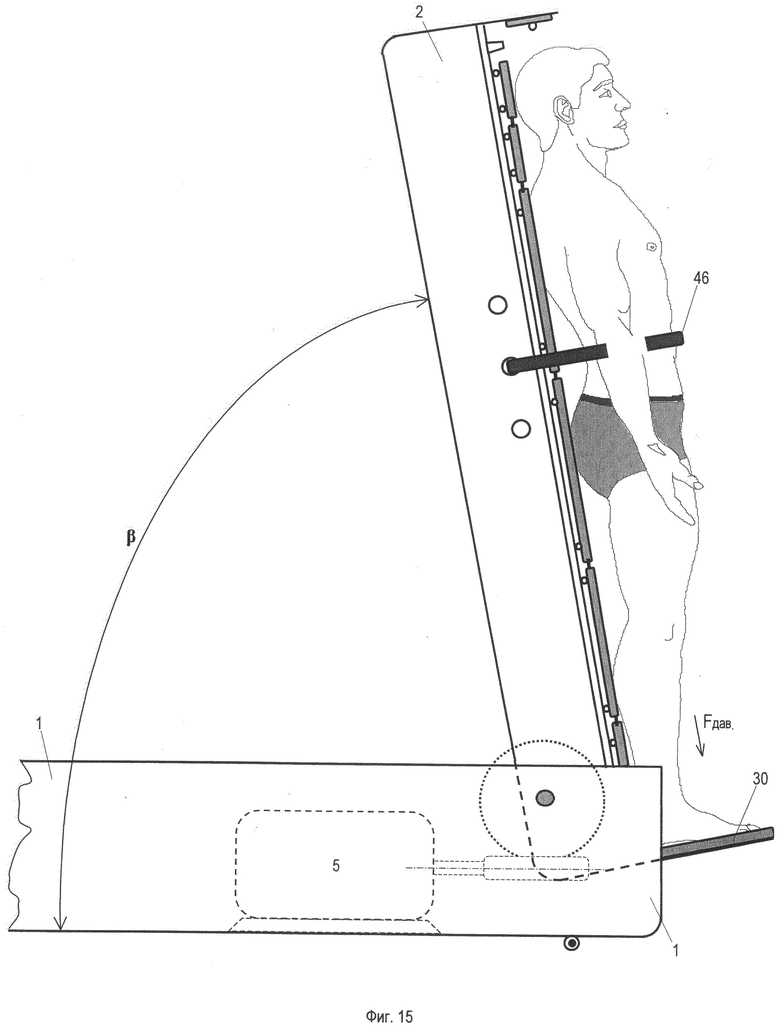
- на фиг.15 - работа установки в режиме «вертикализация»;
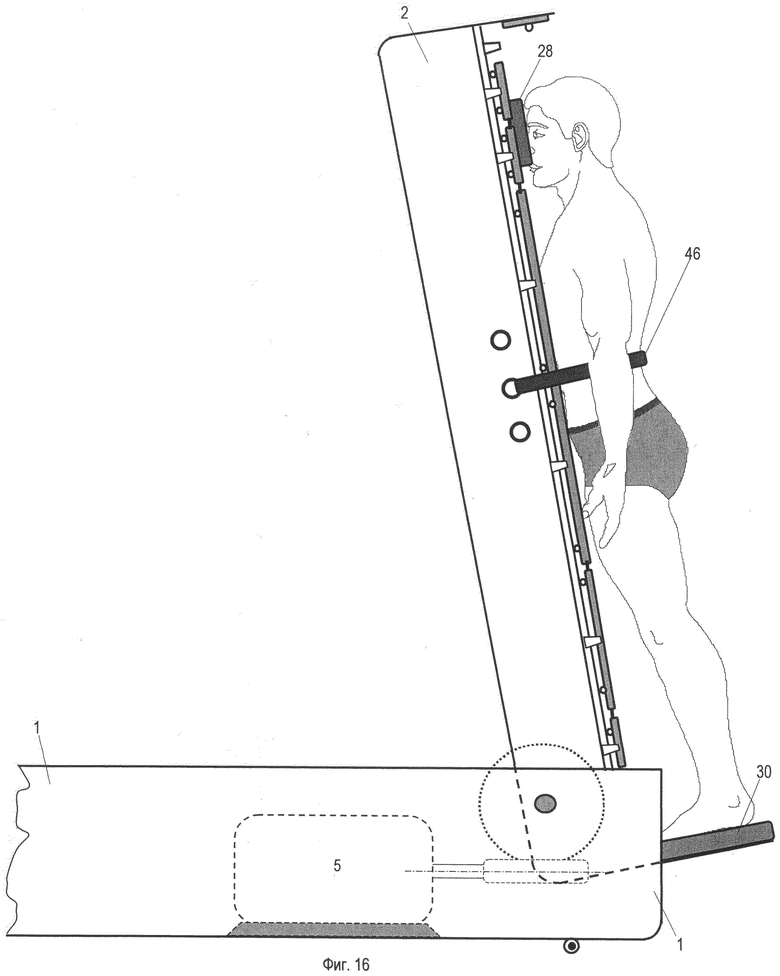
- на фиг.16 - работа установки в режиме «ручной массаж» или «мануальная терапия»;
- на фиг.17 и 18 - изображения подголовника и подколенника;
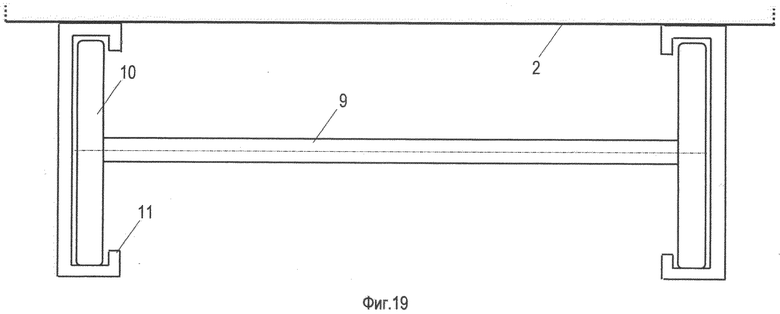
- на фиг.19 - вид конструкции направляющих с торца (с роликами);
- на фиг.20 - временные диаграммы работы установки в режиме «вытяжение».
Описание конструкции установки (в статике).
Механотерапевтическая установка для массажа и гравитационного вытяжения позвоночника содержит:
- массивную станину 1 (фиг.1),
- стол 2, снабженный горизонтальной осью 3, жестко соединенной с ним, и шарнирно - со станиной 1 (фиг.4 и 5),
- кушетку 4 (фиг.4 и 5), размещенную на столе 2,
- узел наклона стола, содержащий электропривод 5, закрепленный на станине 1 и кинематически связанный через редуктор с горизонтальной осью 3 стола 2,
- массажный узел, выполненный в виде Н-образной тележки 6, на концах которой размещены ролики-массажеры 7, и снабженный электровибратором 8 (фиг.6),
- узел перемещения роликов-массажеров, имеющий горизонтальную раму 9, выполненную с возможностью перемещения на роликах 10 по направляющим 11, прикрепленным к нижней поверхности стола 2 и имеющим С-образное сечение (фиг.19), наклонную раму 12, одна сторона которой шарнирно соединена с горизонтальной рамой 9, а другая сторона шарнирно - с массажным узлом, и зубчатый ремень 13, установленный на двух роликах 14 и обеспечивающий гибкую кинематическую связь между электроприводом 15 узла перемещения роликов-массажеров и горизонтальной рамой 9 (фиг.6),
- узел прижатия роликов-массажеров, имеющий язычок 16 и гайку 17, приваренные соответственно к наклонной 12 и горизонтальной 9 рамам узла перемещения роликов-массажеров, вилку 18, резьбовой участок 19 которой находится в зацеплении с резьбой гайки 17, и выполненную с возможностью взаимодействия с язычком 16, и нажимной вал 20, выполненный с возможностью (при необходимости) сцепления с вилкой 18 и снабженный возвратной пружиной 21 и рукояткой 22 (фиг.6),
- ограничитель перемещений роликов-массажеров, выполненный на основе кронштейна 23, жестко соединенного с горизонтальной рамой 9, и двух сигнализаторов 24 и 25 крайнего положения (фиг.6),
- датчик угла наклона стола, выполненный в виде элемента Холла, полупроводниковый преобразователь 26 которого закреплен на корпусе, а постоянный магнит 27 - на валу электропривода 5 узла наклона стола (фиг.1),
- датчик силы вытяжения, выполненный в виде тензодатчика 28, размещенного на вертикальной платформе 29, прикрепленной к головной части стола 2 (фиг.1),
- датчик силы давления стоп, выполненный в виде тензодатчика 30, размещенного на вертикальной платформе 31, прикрепленной к ножной части стола 2 (фиг.1),
- звуковой сигнализатор 32 (фиг.6 и 7),
- тепловые элементы 33 (фиг.2 и 7),
- блок 34 программного управления (фиг.6 и 7),
- и элементы 35 фиксации пациента с гибкими связями 36 (фиг.9-14).
Входы блока 34 программного управления соединены с выходами датчика (26,27) угла наклона, датчика 28 силы вытяжения и датчика 30 силы давления стоп и двух сигнализаторов 24 и 25 крайнего положения, а его выходы - с электроприводом 5 узла наклона стола, электроприводом 15 узла перемещения роликов-массажеров, электровибратором 8, тепловыми элементами 33 и звуковым сигнализатором 32 (фиг.1 и 7).
В установке имеется также выносной пульт 37 управления, подключенный с помощью кабеля к блоку 34.
Сигнализаторы 24, 25 крайнего положения (фиг.6 и 7) выполнены с возможностью регулировки их положения (перемещения) вдоль стола 2 (не показано).
В установке кушетка 4 выполнена многосекционной (например, состоящей из секций 4-1, 4-2, 4-7), каждая из которых снабжена роликами 38 (фиг.1), обеспечивающими возможность перемещения секций по направляющим 39 (фиг.2), закрепленным на верхней поверхности стола 2, и фиксаторами 40 положения секций. Между смежными (соседними) секциями кушетки 4 имеются соединительные элементы 41 (фиг.1 и 2).
В одной из секций кушетки 4 выполнена продольная прямоугольная прорезь 42, соответствующая расположению позвоночника пациента на кушетке 4 и закрытая сверху накидкой 43 (фиг.2).
Тепловые элементы 33 выполнены на основе гибкой графитовой ленты, вшитой в накидку 43 кушетки 4 [16].
Кушетка 4 установки снабжена подголовником 44 (фиг.8, 17) и подколенником 45 (фиг.8, 18), а стол 2 имеет страховочный ремень 46 (фиг.15 и 16). Станина 1 установки опирается на колеса 47 (фиг.1 и 5), снабженные тормозами (не показаны).
Шарнирность между горизонтальной осью 3 и станиной 1 обеспечивается подшипниками 48 (фиг.3-5).
Редуктор узла наклона стола реализован на основе червячной пары, состоящей из червяка 49 и червячного колеса 50, жестко связанных соответственно с валом электропривода 5 и осью 3 стола 2 (фиг.4 и 5).
Упор 51 фиксирует нижнее положение стола 2. Упор 52 ограничивает перемещение кушетки 4, исключая тем самым удар головы пациента о тензодатчик 28.
Установка может быть снабжена аварийной кнопкой 53 пациента, соединенной через кабель с блоком 34 программного управления (фиг.1 и 7).
Назначение и функции конструктивных элементов и узлов установки.
Массивная станина 1 является главным несущим и связующим конструктивным составляющим установки, на котором размещены все остальные ее элементы и узлы. Основное назначение станины 1 - обеспечение устойчивости установки во время выполнения лечебных процедур.
Электровибратор 8 предназначен для формирования вибрационных колебаний роликов-массажеров 7 во время выполнения процедуры механического массажа. Состоит из электродвигателя постоянного тока и прикрепленного к его валу эксцентрика (не показаны).
Выполнение сечения направляющих 11 С-образным исключает выпадение из них под действием собственного веса горизонтальной рамы 9. Кроме того, достигается движение последней строго по заданной траектории. Конструкция направляющих показана на фиг.19.
Электропривод 15 также является электродвигателем постоянного тока. При этом в установке вращательное движение его ротора преобразуется в горизонтальное возвратно-поступательное перемещение роликов-массажеров 7.
Усилие поджатия роликов-массажеров 7 к спине пациента определяется уровнем (высотой) подъема массажной тележки 6.
Сигнализаторы 24 и 25 крайнего положения предназначены для формирования сигналов о достижении рамой 9 заданного крайнего положения и изменения тем самым направления ее движения.
Блок 34 управления обеспечивает хранение и реализацию записанной в нем программы процедур механического массажа и вытяжения. При этом имеется возможность программировать (автоматизировать) лечебные процедуры. Кроме того, в нем хранятся пороговые значения сил вытяжения шейного, грудного и поясничного отделов позвоночника, превышение которых может приводить к травмам позвоночника пациента. В установке, изготовленной заявителем, данные пороговые значения составляют соответственно 20, 55 и 60 кг.
Тензодатчики 28 и 30 обеспечивают преобразование усилий вытяжения и давления в соответствующие электрические сигналы. В установке, изготовленной заявителем, они реализованы на базе серийно выпускаемого преобразователя типа PC42-100kg-C3 (Flintec).
Звуковой сигнализатор 32 предназначен для звукового информирования медперсонала и пациента о работе установки.
Элементы фиксации (ремни) 35 с гибкими связями 36 предназначены для приложения усилий к соответствующим участкам тела пациента.
Электронный выносной пульт 37 управления предназначен для ввода параметров процедур и отображения получаемой из программного блока 34 информации. Конструктивно представляет собой совокупность сенсорных переключателей и индикаторов.
Накидка 43 предназначена для исключения непосредственного контакта спины пациента с роликами-массажерами 7.
Подголовник 44 и подколенник 45 предназначены для удобства размещения пациента на кушетке 4. На практике диаметры подколенника 45 могут быть разными и доходить до 250 мм. В общем случае подколенник 45 используется для повышения лечебного эффекта процедуры механическою массажа, так как при сгибании ног в коленях расслабляются продольные мышцы спины, а поясничный отдел позвоночника несколько выпрямляется. Данное обстоятельство обеспечивает более плотный их контакт с роликами-массажерами 7 и, как следствие, более эффективное их воздействие. Некоторые конструкции подголовника 44 и подколенника 45 показаны на фиг.17 и 18.
Страховочный ремень 46 обеспечивают страховку тела пациента от падения во время выполнения процедур.
Оснащение станины 1 четырьмя колесами 47 позволяет, не прилагая относительно больших усилий, перемещать, при необходимости, установку по горизонтальной поверхности (пола).
Редуктор, реализованный на основе червяка 49 и червячного колеса 50, является «понижающим обороты» редуктором.
Описание работы установки (в динамике).
Описываемая установка является многофункциональной и позволяет реализовать на ней, в частности, следующие виды процедур:
- механический или вибромеханический массаж околопозвоночных мышц и связок;
- вытяжение шейного отдела позвоночника (ШОП) в положении «головой вверх»;
- вытяжение грудного отдела позвоночника (ГОП) в положении «головой вверх»;
- вытяжение поясничного отдела позвоночника (ПОП) в положении «головой вверх»;
- вытяжение поясничного отдела позвоночника (ПОП) в положении «головой вниз»;
- вытяжение коленного сустава (КС);
- вытяжение голеностопного сустава (ГС);
- работа в режиме «вертикализация»;
- работа в режиме «ручной массаж» или «мануальная терапия»;
- другие процедуры.
Процедуры массажа и вытяжения в установке проводятся в несколько этапов:
- предварительное обследование пациента лечащим врачом;
- подготовка установки к процедуре;
- подготовка пациента к процедуре;
- ввод параметров процедуры;
- непосредственное выполнение процедуры;
- послепроцедурные мероприятия.
Перед началом лечебных процедур:
- установка должна быть устойчиво размещена на ровной горизонтальной поверхности (пола);
- ее колеса 47 должны быть заблокированы соответствующими тормозами;
- положения всех подвижных секций кушетки 4 должны быть зафиксированы с помощью фиксаторов 40.
Желательно также, чтобы перед выполнением процедур пациент был одет в легкий спортивный костюм.
1. Процедура «механический (вибромеханический) массаж околопозвоночных мышц и связок».
Оператор помогает пациенту правильно разместиться на кушетке 4 (фиг.8). Пациент ложится спиной вниз так, чтобы:
- ось его позвоночника совпадала с продольной осью кушетки 4,
- массажируемая зона его спины размещалась над прорезью 42 секции 4-3,
- голова располагалась на секции 4-1 или на секции 4-2 кушетки (определяется антропометрическими параметрами пациента).
По просьбе пациента под его голову оператор подкладывает подголовник 44, а под колени
- подколенник 45 (фиг.17 и 18). В качестве подколенника 45 может быть использовано, в частности, сложенное в рулон полотенце.
По завершении изучения предписания лечащего врача оператор записывает через пульт 37 в блок 34 программу лечения. Такая программа может включать в себя, в частности:
- дату проведения процедуры и ФИО пациента;
- уровень обогрева;
- уровень вибрации роликов-массажеров 7;
- длительность процедуры;
- другие параметры.
Далее оператор:
- нажимая на рукоятку 22 вводит вал 20 в зацепление с вилкой 18, и, вращая рукоятку 22 по часовой или против часовой стрелки, меняет угол наклона рамы 12, устанавливая тем самым необходимый уровень (высоту) роликов-массажеров 7, а следовательно, степень прижатия последних к спине пациента (фиг.6 - вид стола 2 снизу);
- путем перемещения сигнализаторов 24 и 25 вдоль стола 2 выставляет границы перемещения роликов-массажеров 7 вдоль спины пациента;
- вручает пациенту аварийную кнопку 53;
- нажимая на кнопку «Пуск» (не показана) на пульте 37, запускает в установке данную лечебную процедуру.
По сигналу «Пуск» блок 34 включает тепловые элементы 33, запускает электровибратор 8 и электропривод 15, что сопровождается двухкратным звуковым сигналом сигнализатора 32. Электропривод 15 приводит в движение горизонтальную раму 9, которая, в свою очередь, перемещает наклонную раму 12 с роликами-массажерами 7. Последние, перекатываясь по спине пациента, осуществляют механический (вибромеханический) массаж ее околопозвоночных мышц и связок.
В момент появления кронштейна 23, например, над сигнализатором 24, последний формирует сигнал, поступающий на программный блок 34, который воспринимает его как сигнал на переключение полярности питающего напряжения электропривода 15. Электропривод 15 в результате начинает вращаться в обратном направлении, меняя тем самым направление перемещения роликов-массажеров 7.
Описанное выше изменение направления перемещения роликов-массажеров 7 осуществляется аналогичным образом, когда кронштейн 23 появляется над сигнализатором 25.
Таким образом, осуществляя возвратно-поступательное перемещение, ролики-массажеры 7 проводят продольный механический вибромассаж спины пациента. Во время такого массажа в результате изменения межпозвонкового расстояния имеет место микровытяжение локальных участков позвоночника. Под влиянием массажных воздействий происходит некоторое растяжение позвоночника, его выравнивание и выпрямление, исчезновение ущемления (сдавливания) нервных окончаний, расположенных возле позвонков, снимается мышечный спазм, восстанавливается нормальная подвижность позвонков, улучшается проводимость нервных импульсов к внутренним органам и тканям.
Кроме того, во время массажа каждый позвонок позвоночника совершает локальные перемещения в сагиттальной плоскости. Если включена вибрация, на такие движения позвонков накладываются дополнительно вибрационные колебания. В результате позвонки осуществляют более сложные периодические «массажные» колебания.
Если в процессе проведения процедуры возникает необходимость в экстренной остановке работы установки, пациенту достаточно нажать на кнопку 53. При этом автоматически прекращается перемещение массажной тележки 6 и отключаются тепловые элементы 33, а сигнализатор 32 формирует многократный звуковой сигнал.
Примечание. Вибрация при механическом массаже применяется, если она не противопоказана пациенту.
Примечание. Регулировка уровня подъема роликов-масажеров 7 проводится только при неподвижной раме 9, находящейся в крайнем положении у головного участка кушетки 4.
Примечание. Процедуру вибромеханического массажа рекомендуется начинать с минимального уровня подъема роликов-массажеров 7, постепенно увеличивая степень их прижатия к спине пациента.
Если же время процедуры массажа истекло, блок 34 программного управления также производит останов электропривода 15, вибратора 8, отключает тепловые элементы 33 и включает сигнализатор 32, формирующий однократный звуковой сигнал.
Далее следуют послепроцедурные мероприятия, описанные ниже.
2. Процедура «вытяжение шейного отдела позвоночника (ШОП) «головой вверх» (фиг.9).
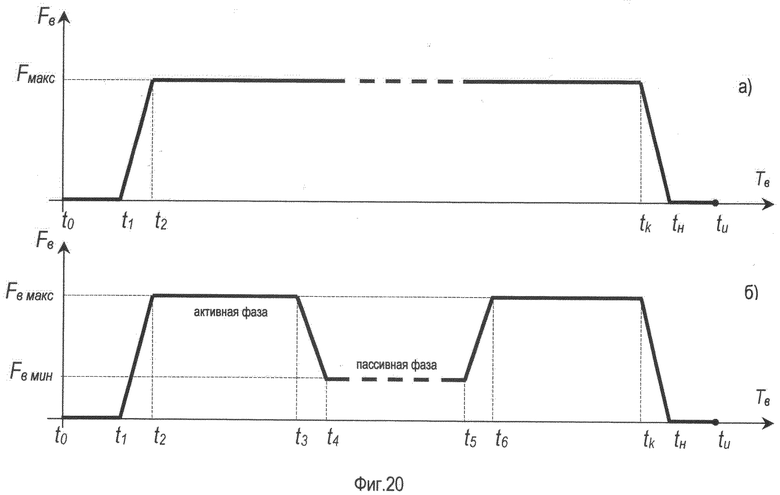
Все лечебные процедуры вытяжения в установке могут проводиться двумя методами. По первому методу нагрузка на позвоночник в течение одного сеанса возрастает во время процедуры и снижается к ее концу («постоянный» режим, см. фиг.20,а). По второму методу нагрузка периодически возрастает и снижается в течение одного проводимого сеанса («переменный» режим, см. фиг.20,б). Конкретный метод вытяжения выбирает лечащий врач.
Временные диаграммы работы устройства в соответствии с данными методами приведены на фиг.20, где:
Тв - время процедуры,
Fв - усилие вытяжения,
t0 - момент времени начала процедуры,
t1,t5 - моменты времени начала вытяжения,
t2, t6 - моменты времени достижения заданной силы вытяжения Fмакс (начало активной фазы вытяжения),
t3 - момент времени завершения активной фазы вытяжения (начало обратного хода привода вытяжения),
t4 - момент времени начала пассивной фазы вытяжения,
t5 - момент времени завершения пассивной фазы вытяжения,
tн - момент времени достижения нулевого уровня силы вытяжения,
tu - момент времени достижения приводом 5 вытяжения исходной позиции,
tk - момент времени завершения процедуры,
(t2-t1) - время достижения заданной силы вытяжения Fмакс (период нарастания силы вытяжения),
(t3-t2) - длительность активной фазы,
(t5-t4) - длительность пассивной фазы,
(tн-tк) - период ослабления силы вытяжения,
(hu-fk) - период возврата электропривода 5 «вытяжения» в исходную позицию,
(tk-t0) - длительность процедуры.
Пациент размещается на кушетке 4. Далее на его голову надевается элемент 35 фиксации, выполненный, например, в виде петли Глиссона, которая с помощью с гибких связей 36 соединяется с датчиком 28 силы вытяжения.
После этого отсоединяются соединительные элементы 41 между секциями 4-2 и 4-3 кушетки 4 (фиг.1 и 2) и отключаются фиксаторы 40 положения секций 4-3, 4-4, 4-5, 4-6 и 4-7, т.е. в фиксированном положении остаются только соединенные между собой секции 4-1 и 4-2.
По завершении изучения предписания лечащего врача оператор записывает через пульт 37 в блок 34 управления программу лечения ШОП. Такая программа может включать в себя, в частности:
- дату проведения процедуры и ФИО пациента;
- уровень обогрева;
- усилие (программа) вытяжения ШОП, в том числе максимальное FB макс и минимальное FB мин значения силы вытяжения (фиг.20);
- пороговое Fпор значение силы вытяжения ШОП (обычно не более 20 кг), превышение которого может привести к травмам позвоночника пациента;
- длительность процедуры;
- другие параметры.
Подготовка к процедуре завершается вручением пациенту кнопки 53.
Далее, нажимая на кнопку «Пуск» на пульте 37, оператор запускает в установке лечебную процедуру «вытяжение ШОП «головой вверх», что сопровождается двухкратным звуковым сигналом сигнализатора 32.
По сигналу «Пуск» программный блок 34 включает тепловые элементы 33 и запускает электропривод 5 (фиг.7). Вращение его ротора через червяк 49 и червячное колесо 50 понижающего редуктора передается на горизонтальную ось 3, которая, в свою очередь, начинает наклонять (поворачивать по часовой стрелке) стол 2. При этом суммарный вес Ру.т.ШОП участков тела пациента (кроме веса его головы) воздействует на секции 4-3, 4-4, 4-5, 4-6 и 4-7 кушетки, которые начинают перемещаться на роликах 38 по направляющим 39. В результате вес Ру.т.ШОП раскладывается на две составляющие: нормальную силу Fд давления на поверхность секций кушетки 4 и силу Fв.ШОП вытяжения ШОП, действующую вдоль данной поверхности (фиг.9,б). При этом, если не учитывать коэффициент трения между подвижными в данном случае секциями кушетки 4 и поверхностью стола 2, величина силы вытяжения ШОП будет пропорциональна углу α наклона стола 2:

Данная сила через элемент 35 фиксации и гибкую связь 36 воздействует на измерительный элемент - тензодатчик 28, который преобразует ее в соответствующие электрические сигналы, поступающие на обработку в блок 34. Последний сравнивает их с заданными (программой) значениями силы вытяжения. Результаты сравнения в виде управляющих сигналов поступают на электропривод 5.
Кроме того, в процессе вытяжения ШОП в установке происходит измерение угла α с помощью датчика угла наклона, выполненного на основе элемента Холла. При каждом обороте вала привода 5 постоянный магнит 27 наводит на полупроводниковом преобразователе 26 электрический импульс, который подсчитывается блоком 34. В результате количество подсчитанных импульсов оказывается пропорциональным соответствующему углу α. При этом блок 34 каждому значению угла α ставит в соответствие принятое от тензодатчика 28 значение силы Fв.ШОП. В итоге, по завершении процедуры вытяжения, в блоке 34 формируется совокупность («таблица») значений угла α и соответствующих им значений силы Fв.ШОП. Наличие такой таблицы значительно упрощает формирование программы вытяжения при повторном принятии процедуры данным пациентом, так как достаточно бывает «запустить» в установке эту «таблицу».
Если в процессе проведения процедуры сила Fв.ШОП превысит пороговое Fпор значение силы вытяжения, блок 34 автоматически останавливает работу установки.
Кроме того, если в процессе проведения процедуры возникает необходимость в экстренной остановке работы установки, пациенту достаточно нажать на кнопку 53. При этом автоматически прекращается работа электропривода 5 и отключаются тепловые элементы 33, а сигнализатор 32 формирует многократный звуковой сигнал.
Если же время процедуры вытяжения ШОП истекло, блок 34 программного управления также производит останов электропривода 5 (возврат его в исходное положение), отключает тепловые элементы 33 и включает сигнализатор 32, формирующий однократный звуковой сигнал.
Далее следуют послепроцедурные мероприятия.
3. Процедура «вытяжение грудного отдела позвоночника (ГОП) «головой вверх» (фиг.10).
Выполнение данной процедуры практически не отличается от выполнения процедуры вытяжения ШОП.
Элемент 35 фиксации (грудной пояс) размещается на уровне подмышечных впадин, как показано на фиг.10. Он с помощью с гибких связей 36 соединяется с датчиком 28 силы вытяжения. Кроме того, отсоединяются соединительные элементы 41 между секциями 4-3 и 4-4 кушетки 4 (фиг.1 и 2) и отключаются фиксаторы 40 положения секций 4-4, 4-5, 4-6 и 4-7, т.е. в фиксированном положении остаются только соединенные между собой секции 4-1,4-2 и 4-3.
По завершении изучения предписания лечащего врача оператор записывает через пульт 37 в блок 34 управления программу лечения ГОП. Такая программа может включать в себя, в частности:
- дата проведения процедуры и ФИО пациента;
- уровень обогрева;
- усилие (программа) вытяжения ГОП, в том числе максимальное FB макс и минимальное FB мин значения силы вытяжения (фиг.20);
- пороговое Fпор значение силы вытяжения ГОП (обычно 55 кг), превышение которого может привести к травмам позвоночника пациента;
- длительность процедуры;
- другие параметры.
Далее, нажимая на кнопку «Пуск» на пульте 37, оператор запускает в устройстве лечебную процедуру «вытяжение ГОП «головой вверх», что сопровождается двухкратным звуковым сигналом сигнализатора 32.
Величина силы вытяжения ГОП также будет пропорциональна углу α наклона стола 2:

где Ру.т.ГОП - участки тела пациента, размещенные на перемещающихся при данной процедуре секциях кушетки 2.
Дальнейшая работа установки аналогична ее работе при вытяжении ШОП.
4. Процедура «вытяжение поясничного отдела позвоночника (ПОП) «головой вверх» (фиг.11).
Выполнение данной процедуры практически не отличается от выполнения процедуры вытяжения ГОП.
Элемент 35 фиксации (тазовый пояс) размещается на поясе пациента чуть выше тазовых костей, как показано на фиг.11. Он с помощью гибких связей 36 соединяется с датчиком 28 силы вытяжения.
Далее отсоединяются соединительные элементы 41 между секциями 4-3 и 4-4 кушетки 4 (фиг.1 и 2) и отключаются фиксаторы 40 положения секций 4-4, 4-5, 4-6 и 4-7, т.е. в фиксированном положении остаются соединенные между собой только секции 4-1, 4-2 и 4-3.
Оператор записывает через пульт 37 в блок 34 управления программу лечения ПОП. Такая программа может включать в себя, в частности:
- дата проведения процедуры и ФИО пациента;
- уровень обогрева;
- усилие (программа) вытяжения ПОП, в том числе максимальное FB макс и минимальное FB мин значения силы вытяжения (фиг.20);
- пороговое Fпор значение силы вытяжения ПОП (обычно 60 кг), превышение которого может привести к травмам позвоночника пациента;
- длительность процедуры;
- другие параметры.
Далее, нажимая на кнопку «Пуск» на пульте 37 оператор запускает в установке лечебную процедуру «вытяжение ПОП «головой вверх», что сопровождается двухкратным звуковым сигналом сигнализатора 32.
Величина силы вытяжения ПОП также будет пропорциональна углу α наклона стола 2:

Дальнейшая работа установки аналогична ее работе при вытяжении ГОП.
5. Процедура «вытяжение поясничного отдела позвоночника (ПОП) «головой вниз».
На фиг.12 показан другой вариант вытяжения ПОП, когда в процессе вытяжения голова пациента находится в «нижней» части стола 2.
Исходное положение пациента - на «горизонтальной» кушетке 2 голова его «справа».
Элемент 35 фиксации (тазовый пояс) размещается на поясе пациента чуть выше тазовых костей. Он с помощью с гибких связей 36 соединяется с датчиком 28 силы вытяжения.
Отсоединяются соединительные элементы 41 между секциями 4-4 и 4-5 кушетки 4 (фиг.1 и 2) и отключаются фиксаторы 40 положения секций 4-5, 4-6 и 4-7, т.е. в фиксированном положении остаются только соединенные между собой секции 4-1, 4-2, 4-3 и 4-4.
Дальнейшая работа установки аналогична описанному выше.
Примечание. Выбор метода вытяжения ПОП (фиг.11 или фиг.12) осуществляется лечащим врачом по результатам предварительного обследования пациента.
Примечание. Описанным выше всем процедурам вытяжения может предшествовать процедура «механический (вибромеханический) массаж околопозвоночных мышц и связок».
6. Процедура «вытяжение (разгрузка) коленного сустава (КС)».
Исходное положение пациента - на «горизонтальной» кушетке 2 голова его находится «справа». Положение на нем суставного ремня 35 с гибкими связями 36 при вытяжении (разгрузке) коленного сустава показано на фиг.13.
Отсоединяются соединительные элементы 41 между секциями 4-3 и 4-4 кушетки 4 (фиг.1 и 2) и отключаются фиксаторы 40 положения секций 4-4, 4-5, 4-6 и 4-7, т.е. в фиксированном положении остаются соединенные между собой только секции 4-1, 4-2 и 4-3.
Дальнейшая работа установки аналогична описанной выше.
7. Процедура «вытяжение (разгрузка) голеностопного сустава (ГС)».
Размещение пациента на кушетке 4 и положение на нем суставного ремня 35 с гибкими связями 36 при вытяжении (разгрузке) голеностопного сустава показано на фиг.14.
Исходное положение пациента - на «горизонтальной» кушетке 2 голова его находится «справа».
Отсоединяются соединительные элементы 41 между секциями 4-3 и 4-4 кушетки 4 (фиг.1 и 2) и отключаются фиксаторы 40 положения секций 4-4, 4-5, 4-6 и 4-7, т.е. в фиксированном положении остаются соединенные между собой только секции 4-1, 4-2 и 4-3.
Дальнейшая работа установки аналогична описанной выше.
8. Процедура «вертикализация» (фиг.15).
Процедура «вертикализация» предназначена для восстановления функции вестибулярного аппарата пациента, - для тренировки его функции вертикального стояния (например, после длительного нахождения в постели или пребывания в невесомости).
Исходное положение пациента - горизонтально на кушетке 2. При этом голова его находится «слева», а стопы размещены на тензодатчике 30. Отключаются все фиксаторы 40 положения секций кушетки 4. При выполнении процедуры используется страховочный ремень 46 для исключения падения тела пациента.
Программа лечебной процедуры может быть построена, например, следующим образом. На первом этапе стол 2 вместе с пациентом поворачивается на некоторый относительно небольшой угол β и останавливается. С помощью тензодатчика 30 измеряется давление стоп, величина которого фиксируется в блоке 34. По истечении заданного промежутка времени стол 2 возвращается в исходное горизонтальное положение.
Указанная процедура повторяется заданное число раз.
На втором этапе стол 2 вместе с пациентом поворачивается уже на несколько больший угол β и вновь останавливается. С помощью тензодатчика 30 вновь измеряется давление стоп, величина которого вновь фиксируется в блоке 34. По истечении заданного промежутка времени стол 2 возвращается в исходное горизонтальное положение.
Указанная процедура также повторяется заданное число раз.
При каждом новом этапе значение угла β увеличивается. В итоге в блоке 34 формируется (запоминается) таблица значений угла β и соответствующих им величин давления стоп пациента на тензодатчик 30. Полученная таблица может служить основанием для анализа процедуры «вертикализации» и последующей коррекции параметров данной процедуры.
7. Процедура «работа в режиме «ручной массаж» или «мануальная терапия».
Данная процедура предназначена для выполнения ручного массажа или мануальной терапии.
Исходное положение стола 2 - горизонтальное. Обычно пациент ложится на кушетку 4 лицом вниз. Далее оператор поворачивает стол 2 на некоторый удобный ему угол (фиг.16). Предварительно пациент фиксируется страховочным ремнем 46. Далее начинается непосредственное выполнение процедуры ручного массажа или мануальной терапии.
В процессе выполнения данной процедуры оператор может при необходимости оперативно менять угол наклона стола 2.
8. Послепроцедурные мероприятия.
Послепроцедурные мероприятия начинаются с осмотра пациента лечащим врачом. После этого пациента отправляют в комнату отдыха для 10-15 минутного послепроцедурного покоя и закрепления тем самым достигнутого эффекта массажа и растяжения позвонковых дисков, высвобождения нервных отростков.
В ряде случаев целесообразно провести дополнительно релаксационный массаж с элементами пассивной гимнастики, медикаментозную терапию, физиотерапию и др., что определяется лечащим врачом.
Достигаемые результаты.
Таким образом, настоящее изобретение решает задачу расширения функциональных возможностей установки, обеспечения возможностей проведения на нем полного комплекса ручного и механического массажа и наклонно-гравитационного вытяжения различных отделов позвоночника и суставов.
В заявляемой установке для пациентов созданы более комфортные условия при выполнении лечебных процедур (наличие подголовника, подколенника и др.). Имеет место снижение риска травматизма при выполнении процедур вытяжения, что достигается благодаря возможности экстренной остановки устройства с помощью аварийной кнопки 53 пациента. Кроме того, накидка 43 снижает риск травматизма спины пациента при механическом массаже с помощью роликов-массажеров 7.
В установке имеется возможность регулировки (изменения) зоны механического массажа путем изменения положения сигнализаторов 24 и 25.
Установка существенно облегчает труд врача, оператора (медсестры). Наличие выносного пульта 37 управления облегчает ввод параметров процедур. Благодаря наличию колес 47 обеспечивается ее мобильность, возможность оперативной переустановки в помещении.
Проверка соответствия заявляемой установки условию патентоспособности «промышленная применимость».
По мнению заявителя, сведения, приведенные в описании, достаточны для осуществления установки. Такая установка для массажа и гравитационного вытяжения позвоночника не вызывает затруднений при ее изготовлении. Заявителем изготовлен опытный экземпляр заявляемой установки.
Совокупность существенных признаков, характеризующих сущность изобретения, в принципе, может быть многократно использована.
Таким образом, вышеизложенные сведения свидетельствуют для заявленного изобретения, как оно охарактеризовано в независимом пункте формулы, о возможности его осуществления с помощью известных и предложенных методов и средств.
Изобретение может найти применение в лечебно-профилактических и санаторно-курортных медицинских учреждениях широкого профиля для ручного и механического массажа и постоянного или периодического вытяжения позвоночника (тракционная терапия). Оно пригодно для эксплуатации в условиях практически любого медучреждения, профилактория, санатория.
Указанное позволяет сделать вывод о соответствии изобретения условию патентоспособности «промышленная применимость» по действующему законодательству.
Таким образом, вышеизложенные сведения свидетельствуют о том, что заявляемое изобретение отвечает всем требуемым критериям патентоспособности и обладает при этом значительными преимуществами по сравнению с известными установками.
Использованные источники информации.
1. Патент РФ №2195243 на изобретение «Устройство для вытяжения позвоночника». МПК А61Н 1/02, публ. 27.12.2002 г.
2. Патент РФ №2265427 на изобретение «Устройство для вытяжения позвоночника». МПК A61H 1/02, публ. 10.12.2005 г.
3. Бонев Л. Экстензионная терапия / Руководство по кинезотерапии. София: Медицина и физкультура. 1978, с.177-181.
4. Авт.св. СССР №858821 на изобретение «Аппарат для занятий лечебной физкультурой» МПК А61Н 1/02, А63В 23/04. Публ. 30.08.1981 г.
5. Авт.св. СССР №1710043 на изобретение «Устройство для разгрузки позвоночника» МПК А61Н 1/02. Публ. 07.02.1992 г.
6. Авт.св. СССР №1710044 на изобретение «Устройство для вытяжения позвоночника» МПК А61Н 1/02. Публ. 07.02.1992 г.
7. Авт.св. СССР №1777858 на изобретение «Устройство для вытяжения позвоночника». МПК A61F 5/04. Публ. 30.11.1992 г.
8. Патент РФ №2314082 на изобретение «Устройство для вытяжения тела пациента». МПК А61Н 1/02. Публ. 10.01.2008 г.
9. Патент РФ №2129457 на изобретение «Тренажер с использованием гравитационного эффекта». МПК А63В 21/00, А61Н 1/02, A61F 5/04. Публ. 27.04.1999 г.
10. Патент РФ №2270649 на изобретение «Стационарная вибродекомпрессионная установка». МПК А61Н 1/02. Публ. 10.12.2003 г.
11. Патент РФ №2092148 на изобретение «Способ вытяжения тела пациента». МПК А61Н 23/00. Публ. 10.10.1997 г.
12. Патент РФ №2391084 на изобретение «Механургический стол для массажа и мануальной терапии». МПК А61Н 1/02, A61G 7/015/ Публ. 10.06.2010 г.
13. Патент РФ №2262915 на изобретение «Устройство для массажа и вытяжения позвоночника». МПК А61Н 1/02. Публ. 27.10.2005 г.
14. Патент РФ №2189213 на изобретение «Стол для мануальной терапии». МПК А61Н 1/00, МПК А61Н 1/02, публ.20.09.2002 г.
15. Патент РФ №2026051 на изобретение «Устройство для механизированного массажа». МПК А61Н 1/02, А61Н 15/00. Публ. 09.01.1995 г. (прототип).
16. Автомобильные электронагреватели ТермоСофт. Журнал «Автомобильный Екатеринбург», №47, 2003 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2013 |
|
RU2539421C2 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2262915C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2005 |
|
RU2275941C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2006 |
|
RU2320165C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА | 2006 |
|
RU2308257C1 |
| Тренажер для растяжения соединений костей ног и позвоночника человека | 2020 |
|
RU2773794C1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2265427C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2008 |
|
RU2386428C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2007 |
|
RU2336069C1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2001 |
|
RU2195243C1 |
Изобретение относится к медицинской технике, а более конкретно к средствам для механотерапии, и может быть использовано для вытяжения позвоночника и суставов конечностей, а также для вибромеханического массажа околопозвоночных мышц и связок. Механотерапевтическая установка для массажа и гравитационного вытяжения позвоночника содержит массивную станину; стол, снабженный горизонтальной осью, жестко соединенной с ним, и шарнирно - со станиной; кушетку, размещенную на столе; узел наклона стола, содержащий электропривод, закрепленный на станине и кинематически связанный через редуктор с горизонтальной осью стола; массажный узел с роликами-массажерами; узел перемещения роликов-массажеров с электроприводом; узел прижатия роликов-массажеров; датчик силы вытяжения; тепловые элементы; элементы фиксации пациента с гибкими связями; блок программного управления, выходы которого подключены к электроприводу узла наклона стола, электроприводу узла перемещения роликов-массажеров и тепловым элементам. Датчик угла наклона стола выполнен в виде элемента Холла, полупроводниковый преобразователь которого закреплен на корпусе, а постоянный магнит - на валу электропривода узла наклона стола. Датчик силы давления стоп выполнен в виде тензодатчика, размещенного на вертикальной платформе, прикрепленной к ножной части стола. Ограничитель перемещений роликов-массажеров выполнен на основе кронштейна, жестко соединенного с узлом перемещения, и двух сигнализаторов крайнего положения. Выносной пульт управления соединен с блоком программного управления. Кушетка выполнена многосекционной, каждая секция снабжена роликами, обеспечивающими возможность перемещения секций по направляющим, прикрепленным к верхней поверхности стола, и фиксаторами положения секций, а в одной из секций кушетки выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой. Узел перемещения роликов-массажеров имеет горизонтальную раму, выполненную с возможностью перемещения на роликах по направляющим, прикрепленным к нижней поверхности стола и имеющим С- образное сечение, наклонную раму, одна сторона которой шарнирно соединена с горизонтальной рамой, а другая сторона шарнирно - с массажным узлом, и зубчатый ремень, установленный на двух роликах и обеспечивающий гибкую кинематическую связь между электроприводом узла перемещения роликов-массажеров и горизонтальной рамой. Узел прижатия роликов-массажеров имеет язычок и гайку, приваренные соответственно к наклонной и горизонтальной рамам узла перемещения роликов-массажеров, вилку, резьбовой участок которой находится в зацеплении с резьбой гайки, и выполненную с возможностью взаимодействия с язычком, и нажимной вал, выполненный с возможностью зацепления с вилкой и снабженный возвратной пружиной и рукояткой. Датчик силы вытяжения выполнен в виде тензодатчика, размещенного на вертикальной платформе, прикрепленной к головной части стола. Сигнализаторы крайнего положения выполнены с возможностью регулировки их положения вдоль стола, а входы блока программного управления соединены с выходами датчиков угла наклона, силы вытяжения и силы давления стоп и двух сигнализаторов крайнего положения. Изобретение позволяет обеспечить возможность проведения на ней более полного комплекса ручного и механического массажа и гравитационного вытяжения различных отделов позвоночника и суставов, а также создать для пациентов более комфортные условия при выполнении лечебных процедур, снизить риск травматизма. 6 з.п. ф-лы, 20 ил.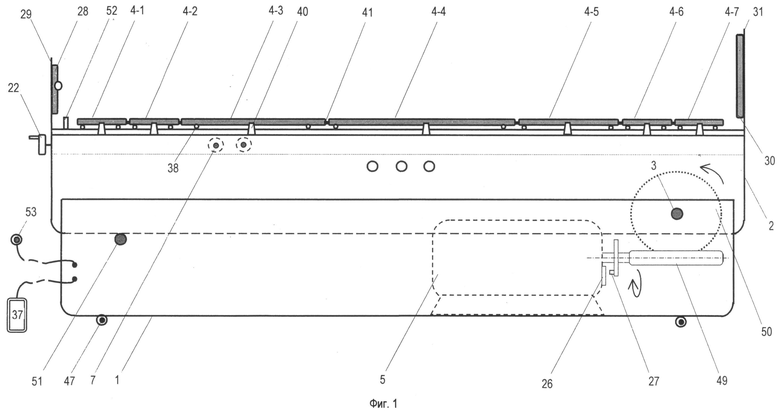
1. Механотерапевтическая установка для массажа и гравитационного вытяжения позвоночника, содержащая:
- массивную станину,
- стол, снабженный горизонтальной осью, жестко соединенной с ним, и шарнирно - со станиной,
- кушетку, размещенную на столе,
- узел наклона стола, содержащий электропривод, закрепленный на станине и кинематически связанный через редуктор с горизонтальной осью стола,
- массажный узел с роликами-массажерами,
- узел перемещения роликов-массажеров с электроприводом,
- узел прижатия роликов-массажеров,
- датчик силы вытяжения,
- тепловые элементы,
- элементы фиксации пациента с гибкими связями,
- и блок программного управления, выходы которого подключены к электроприводу узла наклона стола, электроприводу узла перемещения роликов-массажеров и тепловым элементам,
отличающаяся тем, что содержит также:
- датчик угла наклона стола, выполненный в виде элемента Холла, полупроводниковый преобразователь которого закреплен на корпусе, а постоянный магнит - на валу электропривода узла наклона стола,
- датчик силы давления стоп, выполненный в виде тензодатчика, размещенного на вертикальной платформе, прикрепленной к ножной части стола,
- ограничитель перемещений роликов-массажеров, выполненный на основе кронштейна, жестко соединенного с узлом перемещения, и двух сигнализаторов крайнего положения,
- и выносной пульт управления, соединенный с блоком программного управления, при этом:
- кушетка выполнена многосекционной, каждая из которых снабжена роликами, обеспечивающими возможность перемещения секций по направляющим, прикрепленным к верхней поверхности стола, и фиксаторами положения секций,
- в одной из секций кушетки выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой,
- узел перемещения роликов-массажеров имеет горизонтальную раму, выполненную с возможностью перемещения на роликах по направляющим, прикрепленным к нижней поверхности стола и имеющим С-образное сечение, наклонную раму, одна сторона которой шарнирно соединена с горизонтальной рамой, а другая сторона шарнирно - с массажным узлом, и зубчатый ремень, установленный на двух роликах и обеспечивающий гибкую кинематическую связь между электроприводом узла перемещения роликов-массажеров и горизонтальной рамой,
- узел прижатия роликов-массажеров имеет язычок и гайку, приваренные соответственно к наклонной и горизонтальной рамам узла перемещения роликов-массажеров, вилку, резьбовой участок которой находится в зацеплении с резьбой гайки, и выполненную с возможностью взаимодействия с язычком, и нажимной вал, выполненный с возможностью зацепления с вилкой и снабженный возвратной пружиной и рукояткой,
- датчик силы вытяжения выполнен в виде тензодатчика, размещенного на вертикальной платформе, прикрепленной к головной части стола,
- сигнализаторы крайнего положения выполнены с возможностью регулировки их положения вдоль стола,
- а входы блока программного управления соединены с выходами датчиков угла наклона, силы вытяжения и силы давления стоп и двух сигнализаторов крайнего положения.
2. Установка по п.1, отличающаяся тем, что тепловые элементы выполнены на основе гибкой графитовой ленты, вшитой в накидку кушетки.
3. Установка по п.1, отличающаяся тем, что массажный узел выполнен в виде Н-образной тележки, на концах которой размещены ролики-массажеры, и снабжен электровибратором, подключенным к выходу блока программного управления.
4. Установка по п.1, отличающаяся тем, что снабжена аварийной кнопкой пациента, соединенной с входом блока программного управления и звуковым сигнализатором, подключенным к выходу блока программного управления.
5. Установка по п.1, отличающаяся тем, что кушетка снабжена подголовником и подколенником.
6. Установка по п.1, отличающаяся тем, что стол имеет страховочные ремни.
7. Установка по п.1, отличающаяся тем, что станина опирается на колеса, снабженные тормозами.
| УСТАНОВКА ДЛЯ ЛЕЧЕНИЯ ДИСТРОФИЧЕСКИХ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА | 1997 |
|
RU2119321C1 |
| МЕХАНУРГИЧЕСКИЙ СТОЛ ДЛЯ МАССАЖА И МАНУАЛЬНОЙ ТЕРАПИИ | 2009 |
|
RU2391084C1 |
| Штамм @ @ 1/5,используемый для очистки сточных вод от морфолина | 1983 |
|
SU1112051A1 |
| US 2007208289 A1, 06.09.2007 | |||
| JP 00052532578 A, 05.10.1993 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

