Уровень техники
Пассажиры транспортных средств и водители часто утомляются и испытывают дискомфорт в поездках. Это особенно справедливо для лиц, которые проводят большую часть своего рабочего дня, сидя на сиденье транспортного средства, и/или лиц в длительных поездках. Как должно быть понятно, усталость водителя является состоянием, которое может приводить к ухудшению двигательных навыков и повышенному потенциалу для транспортной аварии. Аналогично, пассажиры и водители одинаково находятся под риском длительных паталогических состояний в результате сидения в некомфортном сидячем положении в течение продолжительных периодов.
В настоящее время, противоусталостные системы посадки в транспортном средстве, как правило, предварительно устанавливаются на производстве. В некоторых случаях, эти предварительно заданные на производстве алгоритмы перемещения не способны обеспечивать комфорт и противоусталостные свойства всем пользователям во множестве вариантов применения. Например, один и тот же алгоритм перемещения сиденья может не быть таким же эффективным для крупного взрослого человека, каким он будет для небольшого подростка. Аналогично, данные о транспортном средстве, такие как местоположение, дорожные условия и/или скорость, могут не приниматься во внимание. Во множестве вариантов применения, будет полезным иметь алгоритм регулировки сиденья, который будет персонализированным и вычисленным на основе многообразия данных о пассажирских и/или транспортном средстве.
Таким образом, существует необходимость в улучшении в этой области.
Сущность изобретения
Раскрывается система управления сиденьем транспортного средства для обеспечения пассажира противоусталостными функциональными возможностями. В одном аспекте, система управления сиденьем транспортного средства включает в себя одни или более входных данных для регулировки сиденья. В одном примере, одни или более входных данных для регулировки сиденья могут быть алгоритмом регулировки сиденья. В другом аспекте, одни или более входных данных для регулировки сиденья создаются из сочетания данных о пассажире и/или о транспортном средстве. В еще одном аспекте, одни или более входных данных для регулировки сиденья хранятся на удаленном устройстве и передаются контроллеру посредством беспроводной передачи. В одном примере, контроллер может быть электронным блоком управления (ECU) сиденья транспортного средства.
Дополнительные формы, цели, признаки, аспекты, выгоды, преимущества и варианты осуществления настоящего открытия станут очевидны из подробного описания и чертежей, предоставленных вместе с ним.
Краткое описание чертежей
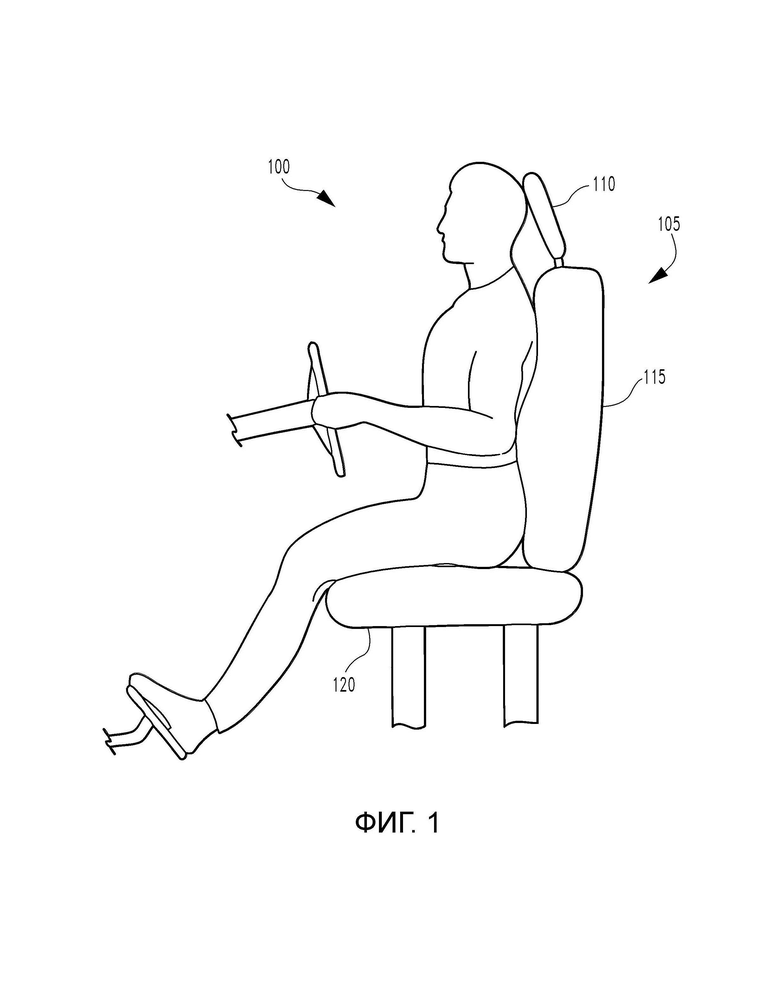
Фиг. 1 является видом сбоку сиденья транспортного средства и пассажира, сидящего на нем.
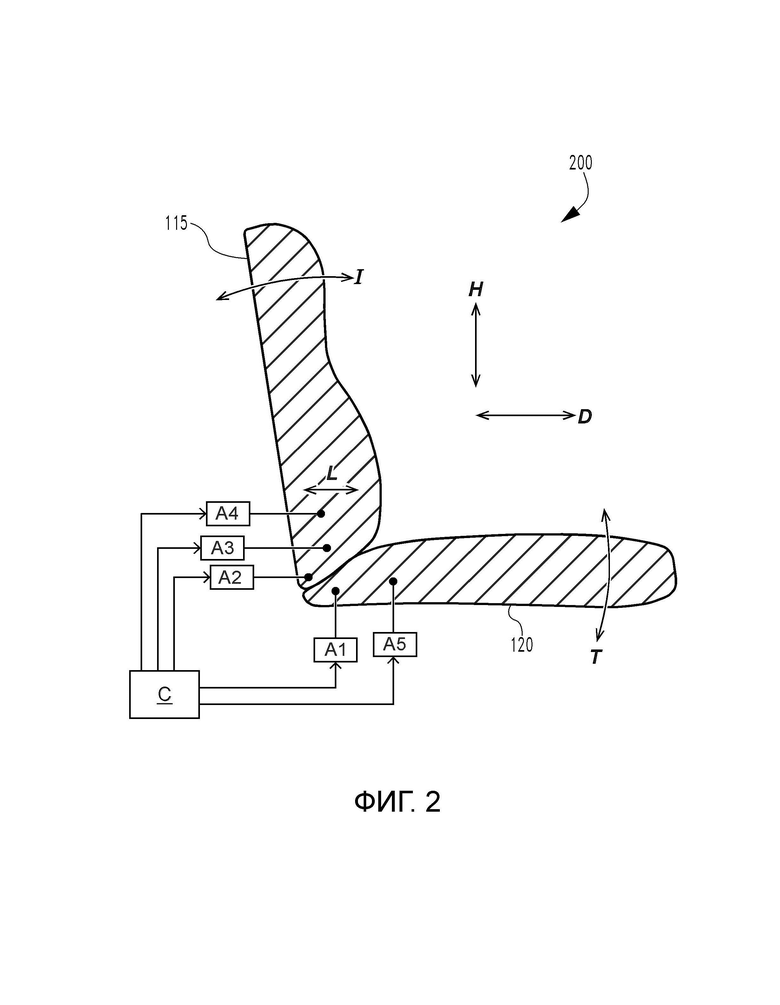
Фиг. 2 является боковым видом в частичном разрезе системы посадки в транспортном средстве.
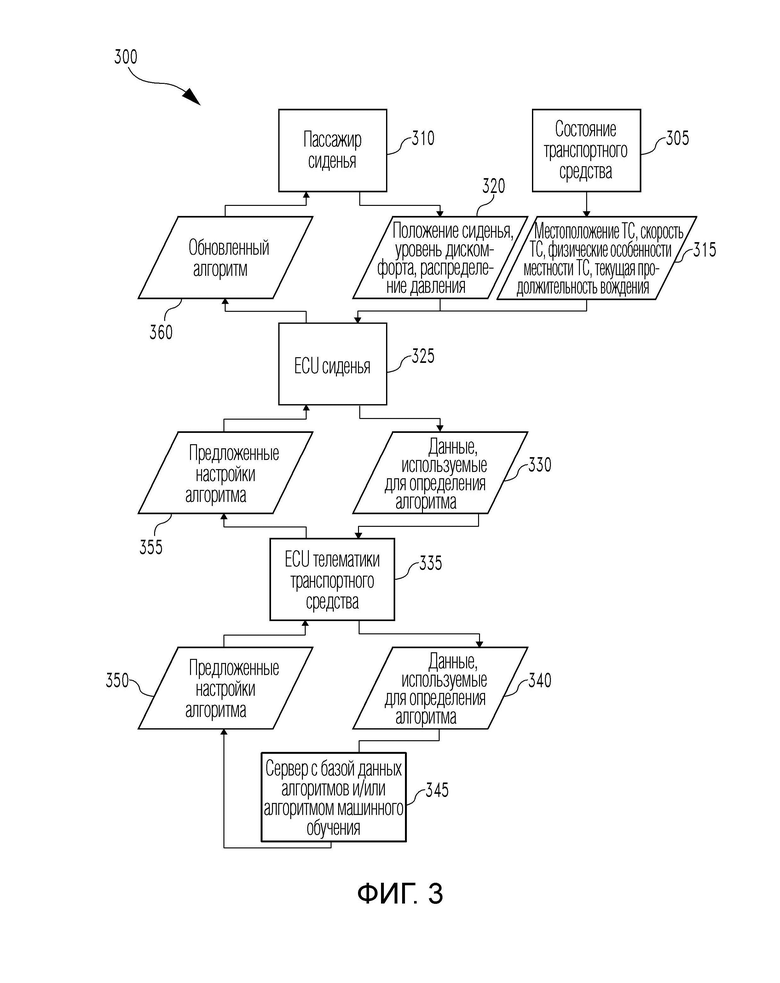
Фиг. 3 является блок-схемой последовательности операций процесса корректировки алгоритма.
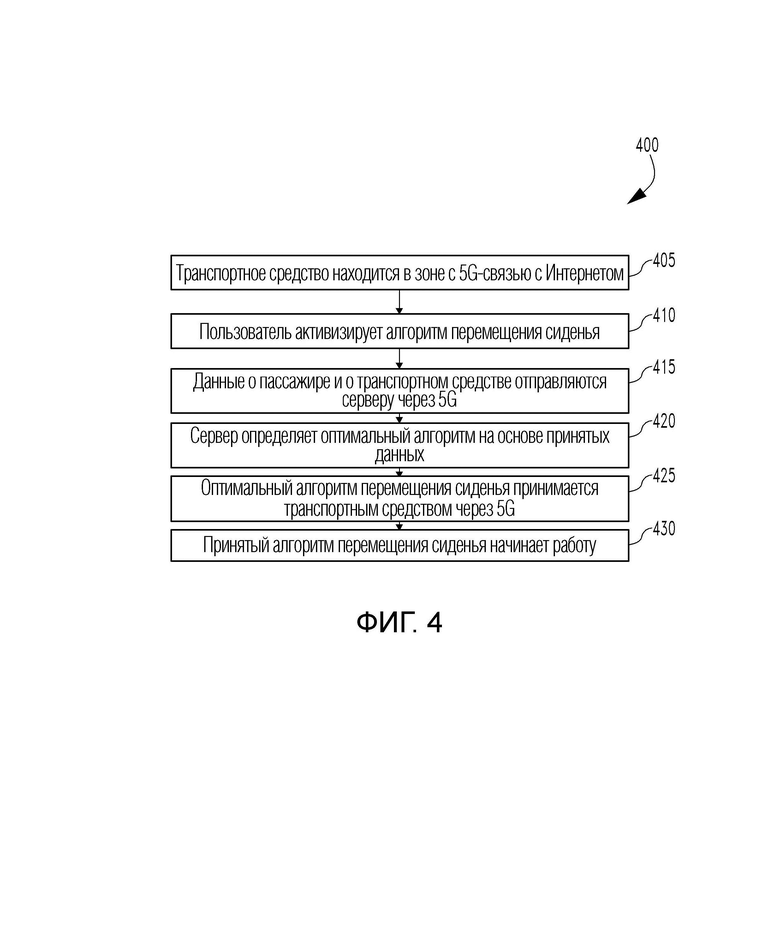
Фиг. 4 является блок-схемой последовательности операций беспроводного процесса выбора алгоритма.
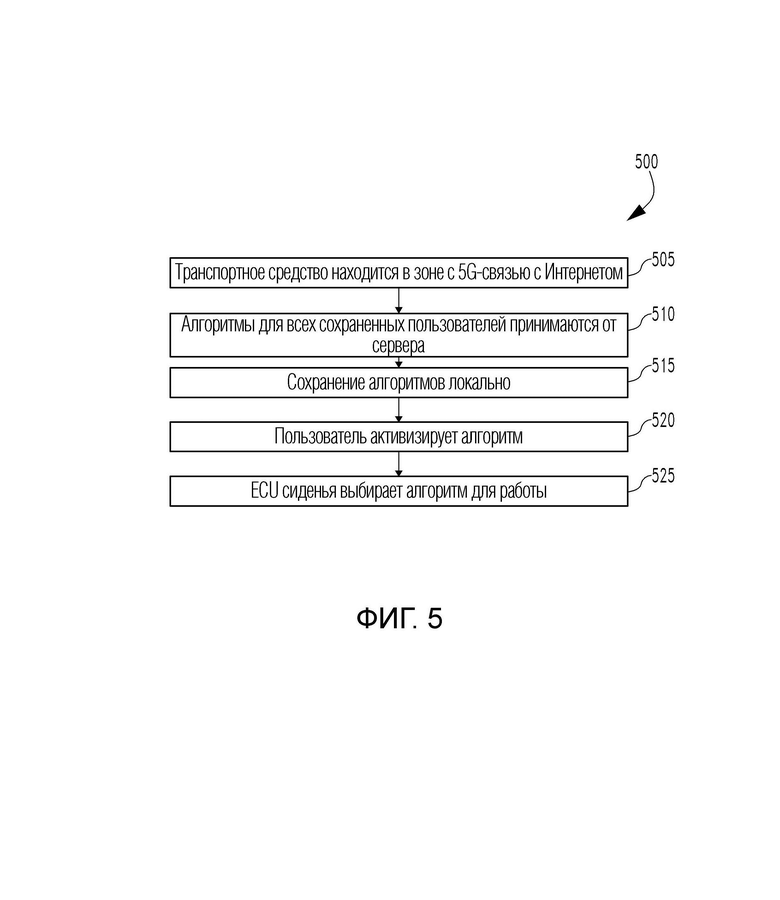
Фиг. 5 является блок-схемой последовательности операций процесса выбора предварительно загруженного алгоритма.
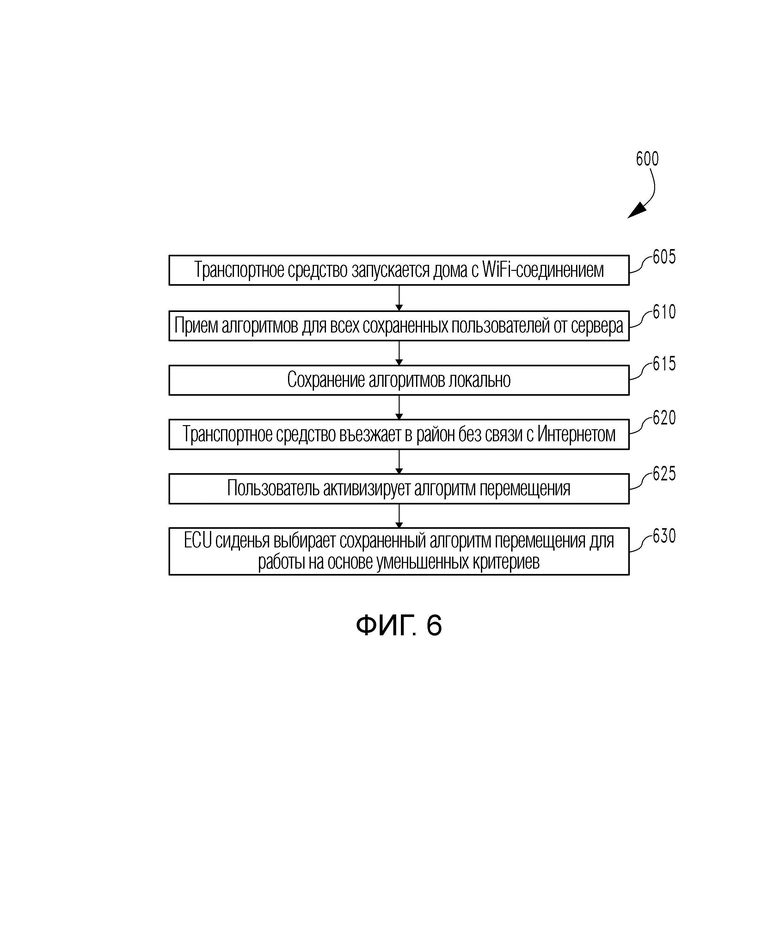
Фиг. 6 является блок-схемой последовательности операций гибридного процесса выбора алгоритма.
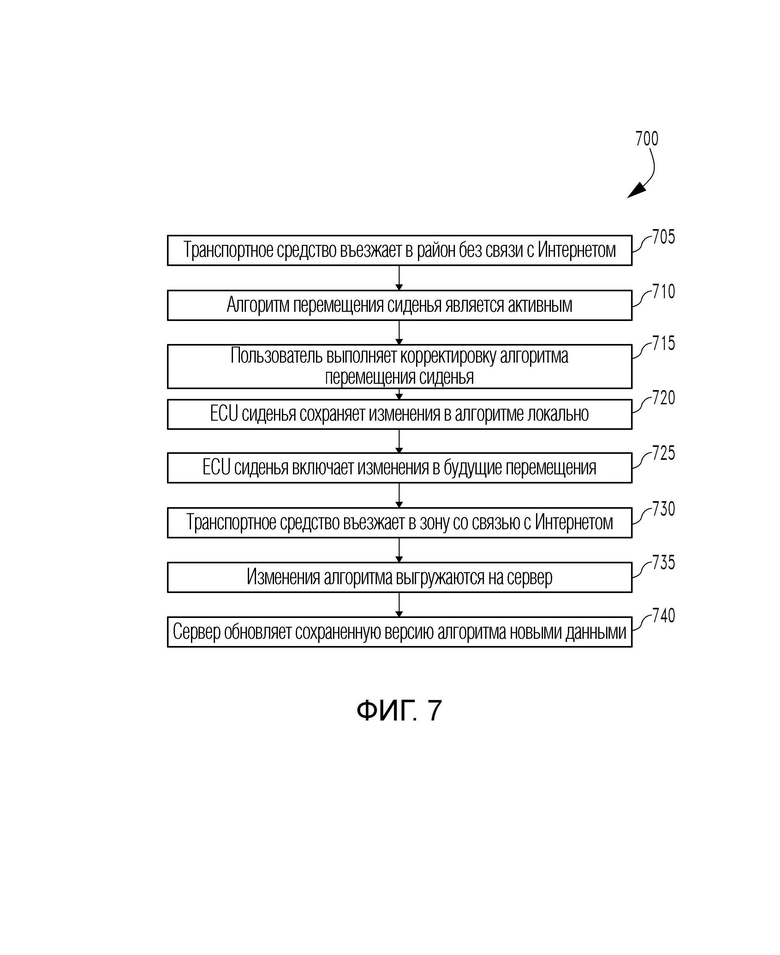
Фиг. 7 является блок-схемой последовательности операций гибридного процесса корректировки алгоритма.
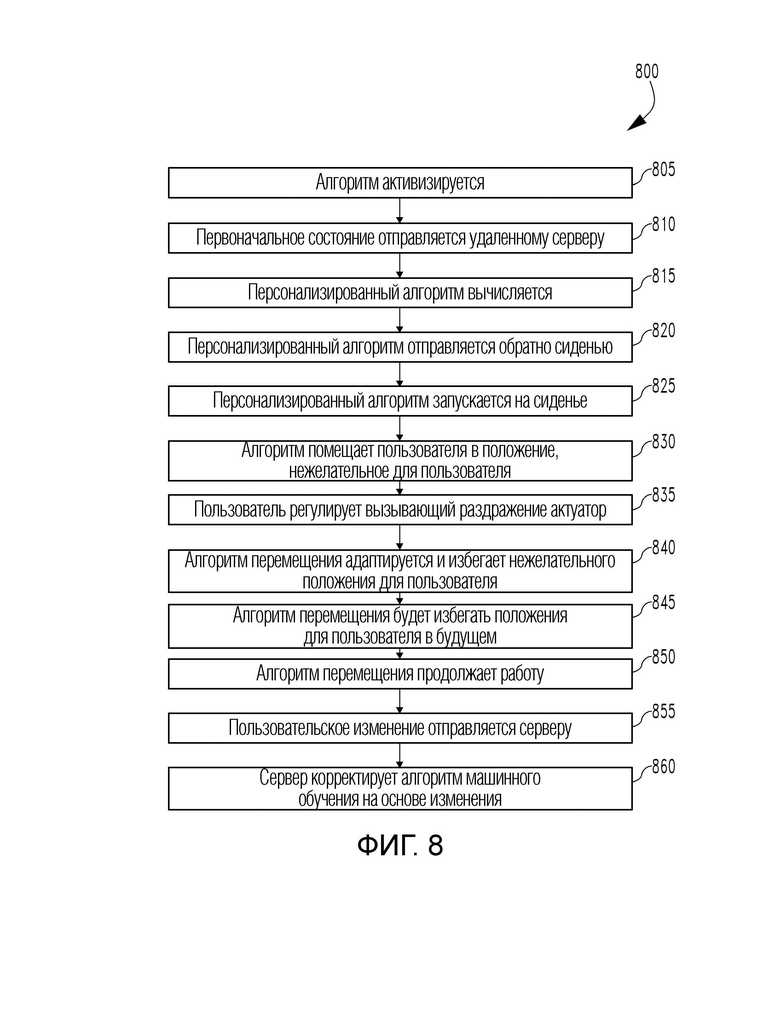
Фиг. 8 является блок-схемой последовательности операций процесса обучения алгоритма.
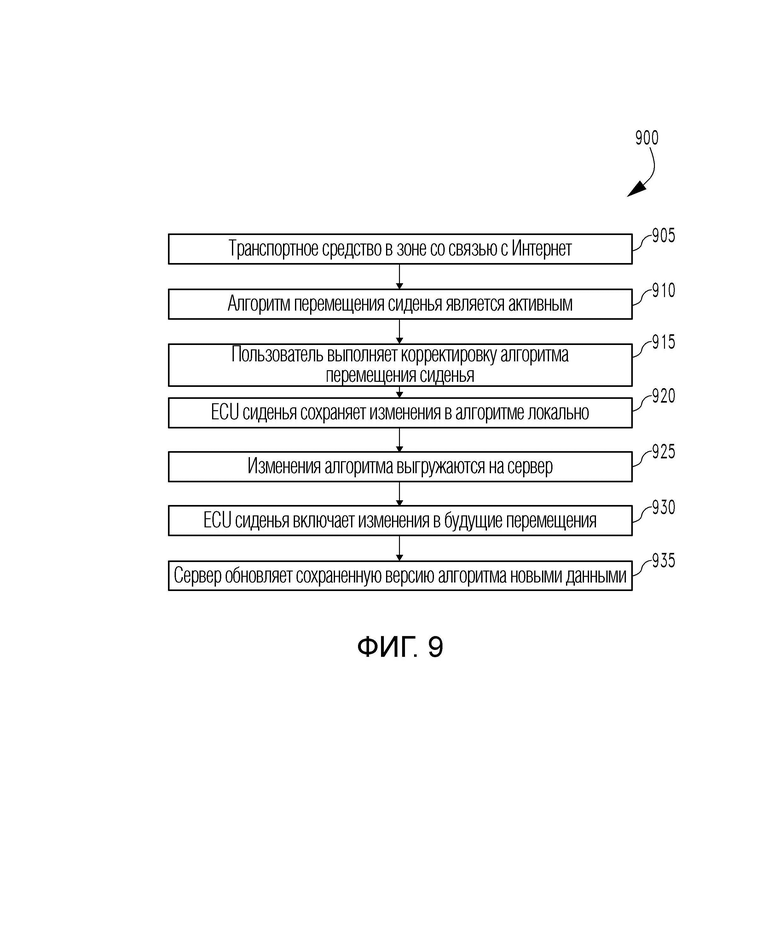
Фиг. 9 является блок-схемой последовательности операций беспроводного процесса корректировки алгоритма.
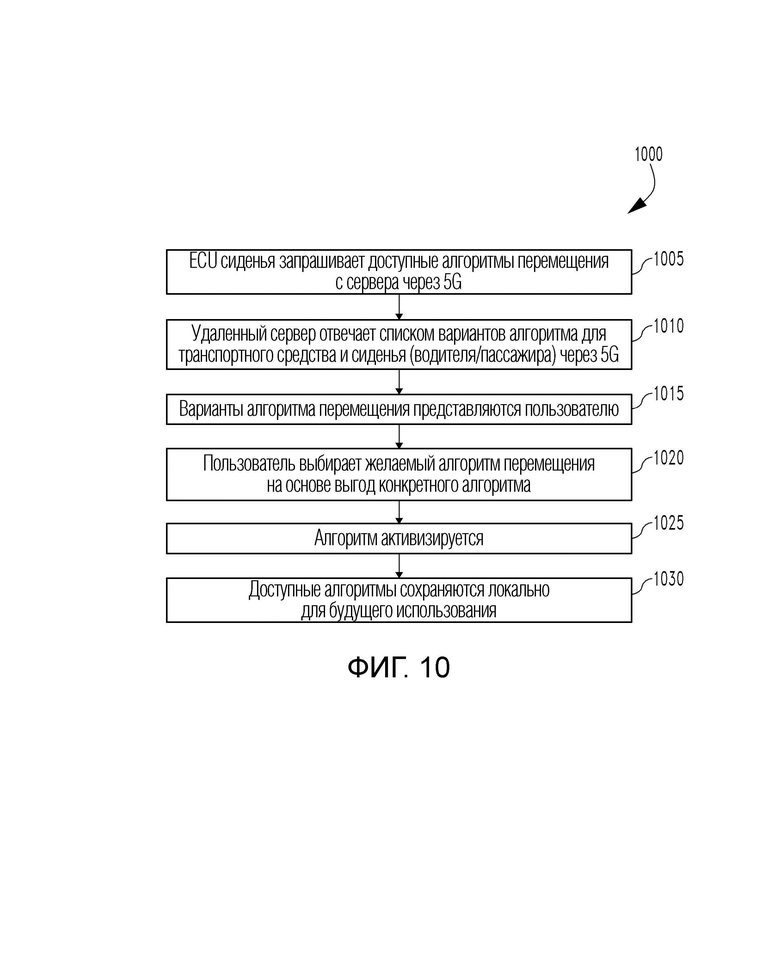
Фиг. 10 является блок-схемой последовательности операций выбранного пользователем алгоритма регулировки сиденья.
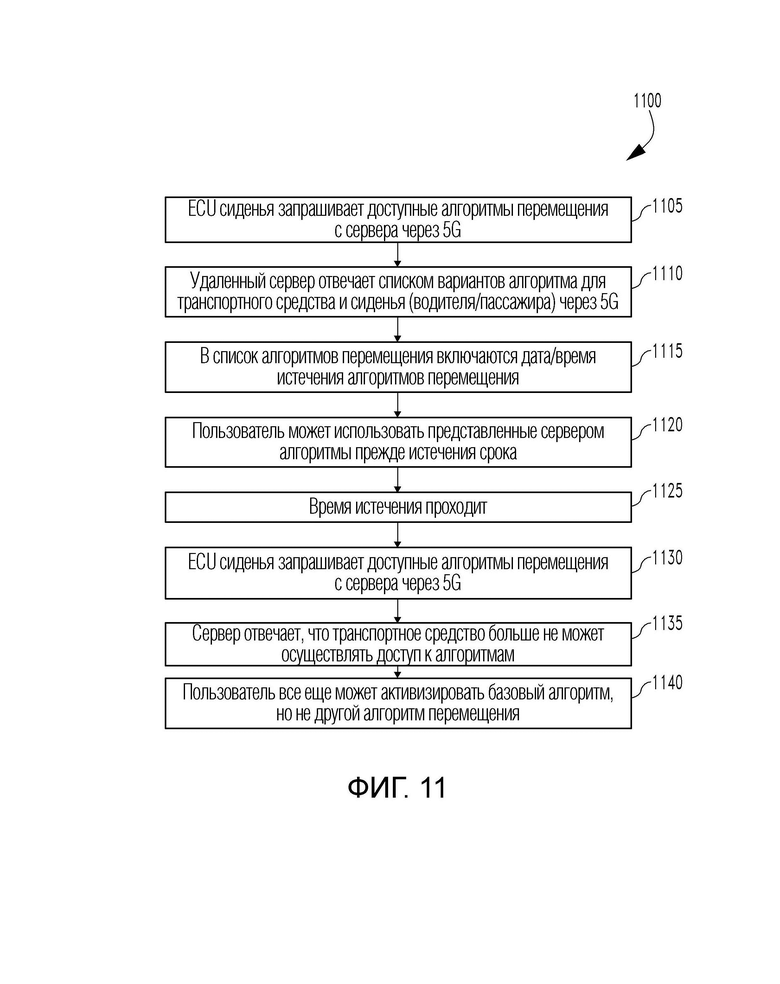
Фиг. 11 является блок-схемой последовательности операций модели подписки на алгоритм регулировки сиденья.
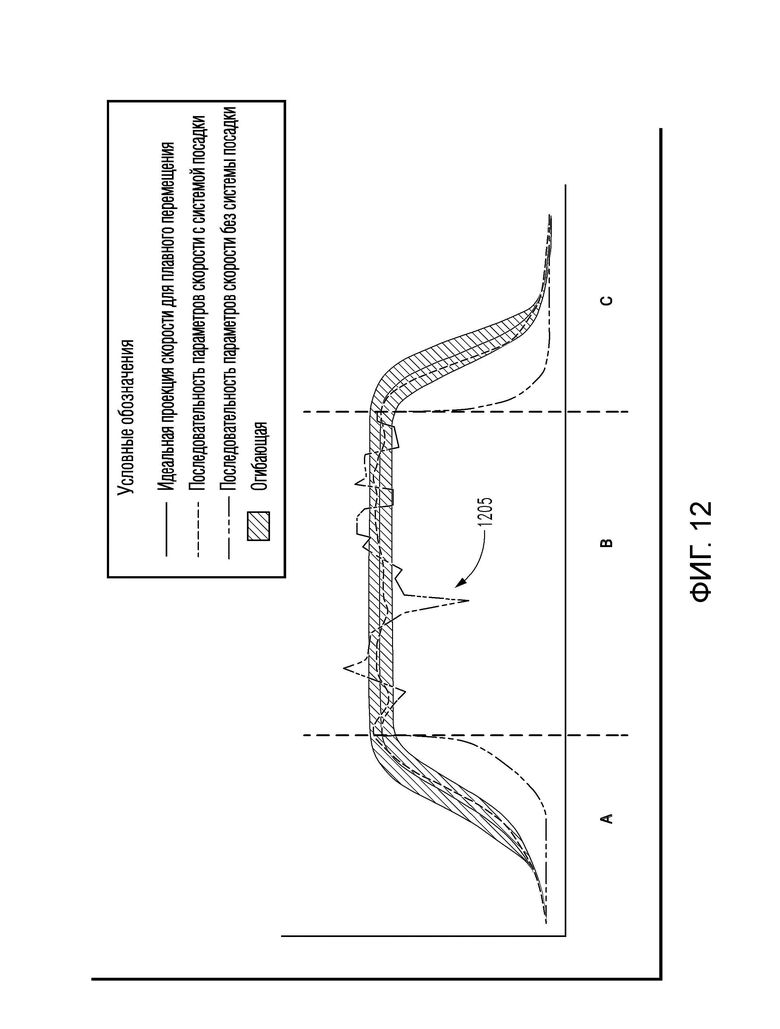
Фиг. 12 является графическим представлением примера проекции скорости плавного перемещения и последовательности параметров скорости.
Описание выбранных вариантов осуществления
В целях способствования пониманию принципов открытия теперь будет сделана ссылка на варианты осуществления, иллюстрированные на чертежах, и специфический язык будет использован, чтобы описать их. Тем не менее, следует понятно, что в связи с этим не подразумевается ограничение рамок открытия. Какие-либо изменения и дополнительные модификации в описываемых вариантах осуществления и любые дополнительные варианты применения принципов открытия, которые описываются в данном документе, считаются обычно приходящими на ум специалисту в области техники, к которой открытие относится. Один вариант осуществления открытия показан более подробно, хотя специалистам в соответствующей области техники будет понятно, что некоторые признаки, которые не относятся к настоящему открытию, могут не быть показаны ради ясности.
Система сидения в транспортном средстве может быть использована для уменьшения усталости пользователя и других нежелательных эффектов путешествия на большое расстояние. Такая система включает в себя типичное сиденье транспортного средства, устанавливаемое в транспортном средстве по меньшей мере два снабжаемых энергией привода для регулировки сиденья и электрический контроллер. Различные варианты осуществления системы могут быть использованы в автомобилях, поездах и/или самолетах, в качестве примеров. Приводы являются подвижными, чтобы изменять сидячее положение, сформированное сиденьем, уменьшая позиционную усталость пользователя. Приводы предпочтительно повторно позиционируют сиденье в различные сидячие положения с помощью медленного перемещения, в среднем типично менее примерно 10 см/с. Электрический контроллер имеет период управления, который, как правило, включает в себя по меньшей мере один период перемещения и, в некоторых вариантах осуществления по меньшей мере один неподвижный период. В типичном варианте осуществления электрический контроллер инициирует период управления после первого периода времени, начинающегося, когда транспортное средство включается. После этого, период управления предпочтительно включает в себя по меньшей мере один период перемещения, когда приводы автоматически осуществляют цикл по сидячим положениям и повторно позиционируют пользователя, чтобы уменьшать усталость от путешествия на большое расстояние.
Фиг. 1 иллюстрирует пассажира 100, сидящего на сиденье 105 транспортного средства. Типичное сиденье транспортного средства включает в себя подголовник 110, спинку 115 сиденья и нижнюю часть 120 сиденья. Как иллюстрировано на фиг. 1, пассажир эксплуатирует моторное транспортное средство с помощью типичного рулевого колеса и системы педалей.
Фиг. 2 иллюстрирует компоненты системы 200 посадки в транспортном средстве, предназначенной, чтобы снижать позиционную усталость пассажира. Следует понимать, что система может быть связана с любым типом сиденья транспортного средства. Система 200 включает в себя различные снабжаемые энергией приводы для регулировки сиденья, выполненные с возможностью перемещать спинку 115 сиденья и нижнюю часть 120 сиденья различными способами, тем самым, изменяя сидячее положение, сформированное посредством сиденья. Некоторые типичные варианты осуществления включают в себя пять приводов, таких как первый привод A1 для перемещения спинки сиденья и нижней части сиденья, в целом, в вертикальном направлении по оси H высоты и второй привод A2 для перемещения спинки сиденья и нижней части сиденья, в целом, в горизонтальном направлении по оси D расстояния. Перемещение по оси D расстояния изменяет расстояние, на котором сиденье позиционируется относительно рулевого колеса и системы педалей для водительского сиденья. Третий привод A3 выполнен с возможностью перемещения поясничной области спинки сиденья по поясничной оси L. Четвертый привод A4 и пятый привод A5 работают, чтобы наклонять или откидывать спинку сиденья по оси I и нижнюю часть сиденья по оси T, соответственно. Питание привода может происходить посредством мотора, сервомотора, шагового мотора, пневматики, гидравлики и/или иным способом.
В предпочтительных вариантах осуществления перемещение приводов включает в себя медленное перемещение, в среднем менее чем примерно 10 см/с. В некоторых вариантах осуществления, каждый привод перемещается из первой позиции во вторую позицию, и циклическая работа приводов включает в себя перемещение из первых позиций во вторые позиции и возврат в первые позиции. В некоторых вариантах осуществления, первая позиция каждого привода является базовой позицией, а вторая позиция каждого привода является противоположной, полностью выдвинутой позицией каждого привода по соответствующей оси. Однако, в некоторых других вариантах осуществления, первая позиция каждого привода является требуемой позицией, предварительно определенной посредством системы или пользователем системы.
Система 200, в общем, включает в себя электрический контроллер C, чтобы автоматически активизировать, эксплуатировать и совершать цикл по различным приводам таким образом, чтобы уменьшать позиционную усталость. Электрический контроллер работает совместно с технологией микропроцессора и/или компьютерной микросхемы, чтобы эксплуатировать систему. Электрический контроллер предпочтительно включает в себя период управления. В некоторых предпочтительных вариантах осуществления, электрический контроллер инициирует период управления, когда транспортное средство включается. Период управления может включать в себя первый неподвижный период времени, прежде чем перемещение начинается. В некоторых других предпочтительных вариантах осуществления, электрический контроллер инициирует период управления после прохождения первого неподвижного периода времени, первый период времени начинается, когда транспортное средство включается. В некоторых предпочтительных вариантах осуществления, первый неподвижный период времени равен примерно 20 минутам. В других предпочтительных вариантах осуществления, первый неподвижный период времени равен примерно 30 минутам. Однако, следует понимать, что период управления может начинаться в другие подходящие моменты времени, которые, в целом, придут на ум специалисту в области техники.
В некоторых вариантах осуществления, период управления включает в себя по меньшей мере один период усталости, равный по меньшей мере десяти минутам. В предпочтительном варианте осуществления, период усталости включает в себя по меньшей мере один интервал времени, в котором по меньшей мере один привод перемещается, чтобы повторно позиционировать сиденье транспортного средства. Период управления предпочтительно включает в себя по меньшей мере один период перемещения, период перемещения включает в себя перемещение по меньшей мере одного привода. В некоторых предпочтительных вариантах осуществления, период управления включает в себя по меньшей мере один период перемещения и по меньшей мере один неподвижный период, в котором приводы являются неподвижными. В некоторых вариантах осуществления, неподвижный период равен по меньшей мере 5 минутам по продолжительности. В некоторых вариантах осуществления, период управления заканчивается, когда транспортное средство выключается.
В некоторых предпочтительных вариантах осуществления, электрический контроллер активизируется автоматически, когда транспортное средство включается. Дополнительно, электрический контроллер может предпочтительно быть вручную активизирован и деактивизирован пользователем системы. В таких вариантах осуществления, пользователь системы может вручную включать и выключать электрический контроллер по желанию. Дополнительно, в некоторых вариантах осуществления, электрический контроллер деактивизируется, когда транспортное средство выключается.
Фиг. 3 показывает блок-схему последовательности операций процесса 300 регулировки сиденья. Процесс 300 регулировки сиденья начинается на этапе 305. На этапе 305 данные о состоянии транспортного средства могут быть собраны. Одновременно, на этапе 310 данные о пассажире сиденья могут быть собраны. В одном варианте осуществления, данные о состоянии транспортного средства и пассажире сиденья могут быть собраны посредством множества датчиков, расположенных в и вокруг транспортного средства. В другом варианте осуществления, данные о состоянии транспортного средства и пассажире сиденья могут быть вручную введены в информационно-развлекательную систему транспортного средства. В еще одном варианте осуществления, сочетание введенных пользователем данных и данных датчиков используется, чтобы получать данные о состоянии транспортного средства и пассажире сиденья.
Этап 315 показывает несколько примеров данных о состоянии транспортного средства. Например, данные о состоянии транспортного средства могут включать в себя местоположение транспортного средства, скорость транспортного средства, особенности местности транспортного средства (песок, снег, скальная порода, грязь и/или шоссе, среди прочих), условия дороги (ледяная, мокрая, сухая, ухабистая и/или гладкая, среди прочих), высота подвески, мягкость подвески и/или тип транспортного средства.
Этап 320 показывает несколько примеров данных о пассажире сиденья. Например, данные о пассажире сиденья могут включать в себя вес пассажира, рост пассажира, возраст пассажира, медицинскую историю пассажира, уровень усталости пассажира, местоположение сиденья пассажира, позиционирование пассажира, распределение веса пассажира и/или обратную связь пассажира. На этапе 325, данные о состоянии транспортного средства и данные о пассажире сиденья могут быть переданы контроллеру. В одном примере, контроллер может быть электронным блоком управления (ECU) сиденья. Контроллер может быть сконфигурирован, чтобы принимать данные о состоянии транспортного средства и о пассажире сиденья беспроводным образом, через сеть управления (CAN), и/или через прямое проводное соединение.
На этапе 330, собранные данные о состоянии транспортного средства и о пассажире сиденья передаются из ECU сиденья в ECU телематики транспортного средства. ECU телематики транспортного средства принимает данные о состоянии транспортного средства и о пассажире сиденья на этапе 335. Аналогично тому, что было описано ранее; передача данных из ECU сиденья в ECU телематики транспортного средства может быть выполнена беспроводным образом, через CAN, и/или через прямое проводное соединение.
На этапе 340, данные о состоянии транспортного средства и о пассажире сиденья передаются из ECU телематики транспортного средства в удаленное устройство. В примерном варианте осуществления, передача может быть беспроводной. В другом варианте осуществления, беспроводная передача может быть 5G. В еще одном варианте осуществления, беспроводная передача может быть Bluetooth. В дополнительном варианте осуществления, беспроводная передача может быть WiFi. Удаленное устройство может быть удаленным компьютером, удаленным сервером и/или удаленной базой данных. В общем, удаленное устройство создает одни или более входных данных для регулировки сиденья. В одном примере, входные данные для регулировки сиденья могут быть алгоритмом для регулировки сиденья. В другом примере, входные данные для регулировки сиденья могут быть ключом выбора алгоритма. В дополнительном примере, удаленное устройство хранит оригинальный алгоритм регулировки сиденья. На этапе 345, оригинальный алгоритм регулировки сиденья может быть откорректирован на основе принятых данных о состоянии транспортного средства и о пассажире сиденья. Таким образом, алгоритм регулировки сиденья может быть персонализирован и сконфигурирован, чтобы размещать каждого пользователя в оптимальном положении на основе введенной информации. Дополнительно, перемещения привода, выполняемые посредством алгоритма регулировки сиденья, конфигурируются, чтобы выполнять регулировку на основе принятой информации, чтобы предоставлять превосходные, предотвращающие усталость свойства.
На этапе 350, персонализированный алгоритм регулировки сиденья, вычисленный на этапе 345, может быть передан обратно в ECU телематики транспортного средства таким же образом, который был описан ранее, в одной примере посредством 5G-передачи. На этапе 355 показано, что персонализированный алгоритм регулировки сиденья может быть дополнительно передан из ECU телематики транспортного средства в ECU сиденья таким же образом, который был обсужден ранее.
На этапе 360, ECU сиденья выводит персонализированный алгоритм регулировки сиденья одному или более приводам сиденья, как обсуждалось на фиг. 2. В целом, персонализированный алгоритм регулировки сиденья конфигурируется, чтобы регулировать одно или более из следующего: частоту срабатывания, величину срабатывания, тип срабатывания, шаблоны срабатывания и/или любое их сочетание. Тип срабатывания может дополнительно регулироваться, чтобы определять движение сиденья, обогрев/охлаждение сиденья и/или изменения окружающей обстановки транспортного средства, такие как освещение, позиционирование зеркала и/или окружающая температура.
Другие способы управления приводами сиденья представляются вместе с вариантами осуществления выбора, описанными ниже. В одном варианте осуществления, данные о состоянии транспортного средства и о пассажире сиденья могут быть отправлены удаленному устройству для создания ключа выбора алгоритма. Ключ выбора алгоритма может быть числом, соответствующим конкретному алгоритму регулировки сиденья, сохраненному локально в ECU сиденья. Например, удаленное устройство принимает входные данные о пассажире сиденья и информацию о состоянии транспортного средства и вычисляет ключ выбора алгоритма, который передается в ECU сиденья. ECU сиденья затем выбирает алгоритм регулировки сиденья, соответствующий ключу выбора алгоритма, который является оптимальным для пассажира сиденья и состояния транспортного средства.
В другом примере, ECU сиденья включает в себя базовый алгоритм регулировки сиденья. Базовый алгоритм регулировки сиденья не является персонализированным и отправляется в сочетании с данными о состоянии транспортного средства и о пассажире сиденья удаленному устройству. Удаленное устройство объединяет данные о пассажире сиденья, данные о состоянии транспортного средства и базовый алгоритм регулировки сиденья, чтобы создавать новый персонализированный алгоритм регулировки сиденья. Персонализированный алгоритм регулировки сиденья затем отправляется обратно в ECU сиденья для активизации.
На фиг. 4 показана блок-схема последовательности операций примера беспроводного процесса 400 выбора алгоритма. На этапе 405, транспортное средство выполняет проверку, чтобы обеспечивать соединение с системой беспроводной связи. В настоящем примере, системой беспроводной связи является 5G. В другом примере, системой беспроводной связи может быть Bluetooth. Типично, транспортное средство проверяет соединение с системой беспроводной связи при запуске. В некоторых примерах, если беспроводное соединение не обнаружено, сообщение об ошибке может возникать на приборной панели транспортного средства. Иногда, особенно в сельских районах, связь с Интернетом транспортного средства может разъединяться и повторно соединяться периодически.
На этапе 410, пассажир (пользователь) сиденья активизирует алгоритм регулировки сиденья. В одном варианте осуществления, алгоритм регулировки сиденья активизируется через значок в информационно-развлекательной системе транспортного средства. В другом варианте осуществления, алгоритм регулировки сиденья активизируется посредством ручной кнопки на приборной панели транспортного средства. В еще одном варианте осуществления, алгоритм регулировки сиденья активизируется через приложение на смартфоне, ассоциированное с транспортным средством. В дополнительном варианте осуществления, алгоритм регулировки сиденья автоматически активизируется при запуске транспортного средства.
На этапе 415, данные о состоянии транспортного средства и о пассажире сиденья могут быть собраны и переданы беспроводным образом удаленному устройству. Как было обсуждено ранее, данные о состоянии транспортного средства и о пассажире сиденья могут быть собраны вручную и введены в информационно-развлекательную систему транспортного средства. Необязательно, данные о состоянии транспортного средства и о пассажире сиденья могут быть собраны посредством одного или более датчиков и автоматически переданы удаленному устройству. В другом варианте осуществления, данные о состоянии транспортного средства и о пассажире сиденья могут быть собраны вручную и введены в приложение смартфона, ассоциированное с транспортным средством.
На этапе 420, удаленное устройство принимает данные о состоянии транспортного средства и о пассажире сиденья и регулирует алгоритм перемещения сиденья согласно принятым данным. Следом за этим, оптимизированный алгоритм перемещения сиденья может быть передан обратно в транспортное средство и принят посредством ECU сиденья на этапе 425. На этапе 430, оптимизированный алгоритм перемещения сиденья начинает управлять приводами сиденья до тех пор, пока дополнительное изменение в алгоритме не будет необходимо. Например, если дорожные условия стали ледяными, алгоритм может корректироваться, чтобы учитывать более значительную сосредоточенность водителя.
Фиг. 5 показывает блок-схему последовательности операций, кратко излагающую процесс 500 выбора предварительно загруженного алгоритма. Процесс 500 выбора предварительно загруженного алгоритма может быть использован в зонах с плохой или "неравномерной" сотовой или Интернет-связью. Альтернативно, пользователь может предпочитать этот способ, даже когда связь с Интернетом является постоянной. Начиная на этапе 505, транспортное средство пытается соединиться с Интернетом. Если успешно, показано на фиг. 510, персонализированные алгоритмы загружаются в ECU сиденья с удаленного устройства. В одном примере, каждый пассажир транспортного средства имеет пользовательский профиль, соответствующий его или ее биометрической информации и предпочтениям перемещения сиденья. Пользовательский профиль указывает удаленному устройству правильные алгоритмы регулировки сиденья для отправки в ECU сиденья. В другом варианте осуществления, не существуют созданные пользовательские профили для обращения удаленного устройства. В этом случае, удаленное устройство будет отправлять список наиболее часто используемых алгоритмов регулировки сиденья для того, чтобы пользователь выбирал из них.
Как было упомянуто ранее, на этапе 515 алгоритмы регулировки сиденья отправляются в ECU сиденья и хранятся до активизации пользователем. Поскольку алгоритмы перемещения сиденья хранятся локально, связь с Интернетом больше не нужна для осуществления доступа к персонализированным алгоритмам перемещения сиденья. На этапе 520, пользователь активизирует алгоритм регулировки сиденья. В общем, пользователь активизирует общий алгоритм регулировки сиденья в способе, описанном на фиг. 4. В другом варианте осуществления, алгоритм регулировки сиденья автоматически выбирается посредством ECU сиденья и начинается без входных пользовательских данных при запуске транспортного средства. На этапе 525, ECU сиденья выбирает оптимальный алгоритм регулировки сиденья для работы на основе определенных пользовательских профилей, обсужденных ранее. Например, ECU сиденья определяет водителя как пользователя A, следовательно, ECU сиденья может применять один из алгоритмов регулировки сиденья пользователя A, сохраненных в пользовательском профиле пользователя A. В другом варианте осуществления, пользователь не имеет пользовательского профиля с ассоциированными алгоритмами регулировки сиденья. В этом случае, ECU сиденья может выбирать пользовательский профиль, наиболее похожий на текущего пользователя. В одном примере, сходство может быть основано на биометрической информации пользователя.
На фиг. 6 показан пример блок-схемы последовательности операций гибридного процесса 600 выбора алгоритма. Гибридный процесс 600 выбора алгоритма может подходить для пользователей, которые предпочитают не иметь соединения своего транспортного средства с Интернетом всегда. Дополнительно, этот способ может работать для транспортных средств, которые являются более старыми и не способны быть постоянно соединенными с Интернетом через 5G или иным способом. Начиная с этапа 605, транспортное средство запускается в диапазоне известной или "безопасной" сети. Известная сеть может быть домашней WiFi-сетью, рабочей WiFi-сетью, WiFi-сетью гостиницы и/или любой другой сетью, считаемой "безопасной" пользователем. После того как транспортное средство запущено в диапазоне известной сети, соединение с Интернетом может быть автоматическим. Дополнительно, известные сети могут быть сохранены или запрограммированы в информационно-развлекательный центр транспортного средства для легкости связи в будущем.
На этапе 610, ECU сиденья принимает алгоритмы регулировки сиденья от удаленного устройства, соответствующие известным пользовательским профилям. Этот этап аналогичен этапу, который описан на фиг. 5. Этап 615 сохраняет алгоритмы регулировки сиденья в ECU сиденья для обращения пользователем. Этот этап является также аналогичным этапу, описанному на фиг. 5.
На этапе 620, транспортное средство покидает область связности для известной сети, в этот момент, транспортное средство может отсоединяться от какого-либо источника доступа к Интернету. В этом сценарии, транспортное средство входит в режим пониженных функциональных возможностей. Однако, благодаря предварительно загруженным пользовательским профилям, алгоритмы регулировки сиденья являются доступными и используемыми пользователем.
На этапе 625, пользователь активизирует алгоритм регулировки сиденья способом, обсужденным ранее. Как было обсуждено, алгоритм регулировки сиденья может быть автоматически активизирован посредством ECU сиденья. На этапе 630 показано, после того как алгоритм регулировки сиденья был активизирован, что ECU сиденья выбирает оптимальный алгоритм для пользователя на основе предварительно загруженных вариантов. Аналогично тому, что было описано на фиг. 5, ECU сиденья может выбирать алгоритм регулировки на основе биометрической информации пользователя. Необязательно, ECU сиденья может выбирать алгоритм регулировки на основе времени дня или продолжительности вождения транспортного средства.
Обращаясь к фиг. 7, показана блок-схема последовательности операций гибридного процесса 700 корректировки алгоритма. Гибридный процесс 700 корректировки алгоритма предоставляет возможность выполнения изменений в алгоритме регулировки сиденья, даже когда может не быть соединения с Интернетом, и удаленное устройство не находится на связи с ECU транспортного средства. Это предоставляет возможность пользователю дополнительно персонализировать алгоритм регулировки сиденья на лету. Дополнительно, это предохраняет пользователя от понуждения в нежелательные или некомфортные положения посредством алгоритма регулировки сиденья.
На этапе 705, транспортное средство переходит в область без связи с Интернетом. В течение этого времени, как показано на этапе 710, алгоритм регулировки сиденья является активным. В случае, когда пользователь находит положение, заданное посредством алгоритма регулировки сиденья, некомфортным, пользователь может вручную регулировать сиденье в более комфортное положение, как показано на этапе 715. В другом варианте осуществления, пользователь может выбирать значок "большой палец вверх/вниз" в информационно-развлекательной системе транспортного средства, чтобы указывать, что положение может быть некомфортным. В еще одном варианте осуществления, пользователь может выбирать значок "большой палец вверх/вниз" в приложении смартфона, ассоциированном с транспортным средством.
На этапе 720 показано, что ECU сиденья записывает ручное изменение или пользовательские входные данные, относящиеся к положению сиденья, и корректирует алгоритм сиденья локально, чтобы избегать нежелательного положения. На этапе 725 показано, что алгоритм регулировки сиденья продолжает работать, но ECU сиденья предотвращает то, что алгоритм регулировки сиденья перемещает пользователя в нежелательное положение. На этапе 730, транспортное средство входит в зону, где связь с Интернетом повторно устанавливается, и соединение с удаленным устройство повторно соединяется.
На этапе 735, ECU сиденья повторно соединяется с удаленным устройством и передает пользовательские входные данные/локально обновленный алгоритм удаленному устройству. Удаленное устройство затем обновляет алгоритм регулировки сиденья, чтобы отражать пользовательские изменения и, на этапе 740, сервер сохраняет скорректированный алгоритм сиденья поверх предыдущей версии, чтобы избегать помещения пользователя в нежелательное положение.
На фиг. 8 показана блок-схема последовательности операций процесса 800 обучения алгоритма. Процесс 800 обучения алгоритма может быть использован пользователем, чтобы создавать оптимальный алгоритм перемещения сиденья. На этапе 805, пользователь активизирует алгоритм регулировки сиденья. Как было обсуждено ранее, алгоритм перемещения сиденья может быть активизирован посредством ручной кнопки на приборной панели, приложения на смартфоне, настройки в информационно-развлекательной системе транспортного средства и/или автоматически посредством ECU сиденья.
На этапе 810, данные о состоянии транспортного средства и о пассажире сиденья отправляются удаленному устройству, чтобы создавать первоначальное состояние. Первоначальное состояние может быть набором данных, используемым удаленным устройством для вычисления первоначального алгоритма регулировки сиденья, как показано на этапе 815. На этапе 820, вычисленный алгоритм регулировки сиденья отправляется обратно в ECU сиденья. На этапе 825, алгоритм регулировки сиденья начинает регулировать перемещение привода сиденья. Если алгоритм регулировки сиденья помещает пользователя в нежелательное или некомфортное положение, как показано на этапе 830, пользователь может регулировать сиденье, как показано на этапе 835. Как было обсуждено ранее, пользователь может регулировать сиденье множеством способов. В одном примере, пользователь может вручную регулировать сиденье, чтобы перемещаться в более комфортное положение. В другом примере, пользователь может предоставлять обратную связь посредством кнопки "большой палец вверх/вниз" в приложении смартфона или в информационно-развлекательной системе транспортного средства.
На этапе 840, алгоритм регулировки сиденья принимает к сведению пользовательские входные данные и адаптируется, чтобы избегать перемещения в неприятное положение. На этапе 845, алгоритм регулировки сиденья продолжает управлять перемещением привода сиденья, как показано на этапе 850, в то же время избегая неприятного перемещения сиденья. На этапе 855, скорректированный алгоритм перемещения сиденья может быть отправлен из ECU сиденья обратно удаленному устройству. На этапе 860, удаленное устройство принимает скорректированный алгоритм перемещения сиденья и сохраняет алгоритм поверх предыдущей версии. Этот способ предоставляет возможность алгоритму регулировки сиденья оставаться текущим относительно предпочтений конкретного пользователя и избегать неприятного перемещения в будущем.
На фиг. 9, показана блок-схема последовательности операций беспроводного процесса 900 корректировки алгоритма. Аналогично тому, что было описано на фиг. 8, беспроводной процесс 900 корректировки алгоритма предоставляет возможность пользователю модифицировать алгоритм регулировки сиденья немедленно, если помещен в некомфортное или нежелательное положение. На этапе 905, транспортное средство может быть в зоне, где связь с Интернетом является доступной, когда алгоритм регулировки сиденья работает, как показано на этапе 910. На этапе 915, пользователь выполняет регулировку сиденья, чтобы избегать некомфортного положения, которое было создано посредством алгоритма регулировки сиденья. Как было обсуждено ранее, пользователь может регулировать сиденье множеством способов. В одном примере, пользователь может вручную регулировать сиденье, чтобы перемещаться в более комфортное положение. В другом примере, пользователь может предоставлять обратную связь посредством кнопки "большой палец вверх/вниз" в приложении смартфона или в информационно-развлекательной системе транспортного средства.
На этапе 920, ECU сиденья записывает изменение, выполненное в алгоритме регулировки сиденья, и регулирует алгоритм локально. Локальное изменение алгоритма сохраняется в ECU сиденья как обновленная/скорректированная версия алгоритма регулировки сиденья. На этапе 925, локальные корректировки алгоритма выгружаются в удаленное устройство. На этапе 930, ECU сиденья использует новый обновленный алгоритм регулировки сиденья для управления приводами сиденья. На этапе 935, удаленное устройство обновляет сохраненный алгоритм регулировки сиденья новым, скорректированным пользователем алгоритмом. Этот вновь обновленный алгоритм может быть сохранен в качестве нового алгоритма регулировки сиденья для этого конкретного пользователя.
Фиг. 10 показывает блок-схему последовательности операций процесса 1000 выбранного пользователем алгоритма регулировки сиденья. Процесс 1000 выбранного пользователем алгоритма регулировки сиденья предоставляет возможность пользователю выбирать конкретный алгоритм регулировки сиденья на основе пользы. В этом способе, пользователь имеет возможность прогнозировать типы перемещений, выполняемых посредством алгоритма регулировки сиденья. Например, пользователь, выбирающий противоусталостный алгоритм, может ожидать меньшее перемещение по сравнению с пользователем, выбирающим спортивный алгоритм. На этапе 1005, ECU сиденья запрашивает у удаленного устройства отправку всех доступных алгоритмов регулировки сиденья в ECU сиденья. На этапе 1010, удаленное устройство отправляет алгоритмы регулировки сиденья на основе профиля водителя. Например, ECU сиденья может отправлять удаленному устройству данные о пассажире сиденья. Удаленное устройство будет использовать данные о пассажире сиденья для выбора правильных алгоритмов регулировки сиденья для отправки. На этапе 1015, алгоритмы регулировки сиденья показываются пользователю для выбора. В одном примере, алгоритмы регулировки сиденья показываются пользователю в информационно-развлекательной системе транспортного средства. В другом примере, алгоритмы регулировки сиденья показываются пользователю в приложении смартфона. В еще одном примере, алгоритмы регулировки сиденья озвучиваются пользователю через звуковую систему транспортного средства.
На этапе 1020, пользователь выбирает алгоритм регулировки сиденья на основе осознаваемой пользы. Например, пользователь может выбирать алгоритм регулировки сиденья, предназначенный, чтобы предоставлять противоусталостные свойства. В другом примере, пользователь может выбирать алгоритм регулировки сиденья, предназначенный, чтобы обеспечивать максимальный комфорт. В еще одном примере, пользователь может выбирать алгоритм регулировки сиденья, предназначенный, чтобы обеспечивать максимальную видимость дороги. На этапе 1025, пользователь активизирует выбранный алгоритм через ручную кнопку на приборной панели, приложение на смартфоне и/или информационно-развлекательную систему транспортного средства. Необязательно, алгоритм автоматически активизируется посредством ECU сиденья после выбора пользователем. На этапе 1030, алгоритмы регулировки сиденья, отправленные из удаленного устройства в ECU сиденья, сохраняются в ECU сиденья для будущего обращения. Например, если пользователь определяет необходимость изменить алгоритм регулировки сиденья с противоусталостного режима на спортивный режим, пользователь будет выбирать новый алгоритм регулировки сиденья. Аналогично предыдущему, регулировка сиденья может выполняться множеством способов. В одном примере, алгоритмы регулировки сиденья показываются пользователю в информационно-развлекательной системе транспортного средства. В другом примере, алгоритмы регулировки сиденья показываются пользователю в приложении смартфона. В еще одном примере, алгоритмы регулировки сиденья озвучиваются пользователю через звуковую систему транспортного средства.
Фиг. 11 показывает блок-схему последовательности операций модели 1100 подписки на алгоритм регулировки сиденья. Модель 1100 подписки на алгоритм сиденья обеспечивает пользовательский доступ к персонализированным алгоритмам регулировки сиденья в течение ограниченного времени на основе купленных интервалов времени. Например, пользователь может покупать доступ к персонализированным алгоритмам регулировки сиденья на день, неделю, месяц, три месяца, шесть месяцев, год, пять лет и/или любое их сочетание. В другом примере, после того как подписка на персонализированный алгоритм регулировки сиденья истекла, пользователь будет сохранять доступ к основному алгоритму регулировки сиденья, сохраненному в ECU сиденья. Однако, для того чтобы пользователь сохранял доступ к персонализированным алгоритмам регулировки сиденья через удаленное устройство, может требоваться подписка.
На этапе 1105, ECU сиденья запрашивает у удаленного устройства отправку всех доступных алгоритмов регулировки сиденья. Удаленное устройство обращается к пользовательским профилям, ассоциированным с транспортным средством, и предоставляет список необязательных алгоритмов регулировки сиденья на этапе 1110. Когда пользователь просматривает список доступных алгоритмов регулировки сиденья, дата истечения подписки может быть показана как на этапе 1115. Например, если пользователь купил двухлетнюю подписку 17 ноября 2020 года и выбирает персонализированный противоусталостный алгоритм регулировки сиденья, алгоритм будет показывать дату истечения 17 ноября 2022 года. В другом примере, если пользователь выбирает основной комфортный алгоритм регулировки сиденья, алгоритм не будет показывать дату истечения, поскольку основные алгоритмы могут не быть привязаны к доступу с моделью подписки. В другом примере, каждый тип алгоритма регулировки сиденья (персонализированный/основной) может быть привязан к подписке и является недоступным, после того как подписка истекла.
Пока не достигнута дата истечения, пользователь может активизировать любой из алгоритмов регулировки сиденья по желанию, как показано на этапе 1120. Однако, после того как дата истечения прошла, как показано на этапе 1125, если другая подписка не была куплена/продлена, персонализированные алгоритмы регулировки сиденья могут быть недоступны. Например, ECU сиденья отправляет запрос удаленному устройству после истечения периода на этапе 1130; удаленное устройство возвращает сигнал ошибки на этапе 1135. Сигнал ошибки может появляться в информационно-развлекательной системе транспортного средства, приложении на смартфоне, ассоциированном с транспортным средством, и/или на приборной панели транспортного средства. Пользователь может все еще активизировать один из основных алгоритмов регулировки сиденья, сохраненных в ECU сиденья, без подписки, как показано на этапе 1140.
В дополнение к модели подписки, работающей для одиночного транспортного средства, расширенная подписка может быть куплена для множества транспортных средств. Например, если пользователь купил подписку для неограниченного количества транспортных средств, персонализированные алгоритмы регулировки сиденья могут быть доступны в любом транспортном средстве, в котором пользователь едет. Однако, транспортное средство может требовать связи с Интернетом и приводы сидений, совместимые с алгоритмами регулировки сиденья. Это может быть особенно полезным в вариантах применения совместно используемых поездок. В другом примере, алгоритмы регулировки сиденья являются применимыми в диапазоне типов транспортных средств, включающих в себя, но не только, самолеты, поезда, автобусы, легковые автомобили, суда и/или любое их сочетание. Этот способ предоставит возможность пользователю запускать персонализированный алгоритм регулировки сиденья в длительном полете или поездке поездом. Однако, транспортное средство может требовать связи с Интернетом и приводы сидений, совместимые с алгоритмами регулировки сиденья.
Пример профиля проекции скорости, наложенного на последовательность параметров скорости, показан на фиг. 12. Фиг. 12 показывает три интервала времени A, B и C, которые соответствуют тому, что привод для регулировки сиденья является неактивным, активным и неактивным, соответственно. Что касается примерного чертежа, ось X соответствует времени, а ось Y соответствует скорости. Примерная идеальная проекция скорости плавного перемещения показана на фиг. 12. Примерная идеальная проекция скорости плавного перемещения постепенно движется от состояния покоя до целевой скорости, скорость является постоянной при целевой скорости на протяжении всего интервала, когда приводу дается команда быть активным, и скорость постепенно возвращается к состоянию покоя. Фиг. 12 также изображает примерную огибающую, заданную минимальными и максимальными значениями, соответствующими необязательной плавной проекции скорости. Фиг. 12 показывает примерную последовательность параметров скорости, следующих в пределах этой необязательной огибающей при использовании этого аспекта. Патенты США 7422285 и 9187020 включены в данный документ по ссылке. Другая последовательность параметров скорости показана выпадающей за пределы огибающей, когда система посадки не используется. Элемент 1205, в частности, показывает примерный параметр скорости, выпадающий за пределы огибающей, когда система посадки не используется.
Глоссарий терминов и альтернативных формулировок
В то время как открытие было иллюстрировано и описано подробно на чертежах и в предшествующем описании, оно должно считаться иллюстративным, а не ограничивающим по характеру, понятно, что только предпочтительный вариант осуществления был показан и описан, и что все изменения, эквиваленты и модификации, которые подпадают под сущность открытия, определенную в последующей формуле изобретения, желательно должны быть защищены. Все публикации, патенты и патентные заявки, упомянутые в этой спецификации, включены в данный документ по ссылке, как если бы каждая отдельная публикация, патент или патентная заявка была конкретно и индивидуально указана как включенная по ссылке и изложенная в своей полноте в данном документе.
Формы единственного числа и т.п. включают в себя формы множественного числа, пока явно не обсуждается иное. В качестве иллюстрации, ссылки на "какое-либо устройство" или "конкретное устройство" включают в себя одно или более таких устройств и их эквивалентов.
Направленные термины, такие как "вверх", "вниз", "верхний", "нижний", "передний", "задний", "поперечный", "продольный", "радиальный", "периферийный" и т.д., используются в данном документе исключительно для удобства читателя для того, чтобы помогать в понимании читателем иллюстрированных примеров. Использование этих направленных терминов не ограничивает каким-либо образом описанные, иллюстрированные и/или заявленные признаки конкретным направлением и/или ориентацией.
Множество связанных объектов, иллюстрированных на чертежах с помощью одинакового номера части, которые различаются буквой для отдельных индивидуальных случаев, могут быть найдены по ссылке, в целом, посредством различаемого фрагмента полного названия и/или только по номеру. Например, если множество "поперечно продолжающихся элементов" 90A, 90B, 90C и 90D иллюстрируются на чертежах, открытие может ссылаться на них как на "поперечно продолжающиеся элементы 90A-90D" или как на "поперечно продолжающиеся элементы 90", или посредством различимого фрагмента полного названия, такого как "элементы 90".
Язык, используемый в описании изобретения, предполагает наличие только своего явного и обычного значения, за исключением случая, когда явно определено ниже. Слова, используемые в определениях, включенных в данный документ, должны иметь только свой ясный и обычный смысл. Такой ясный и обычный смысл является инклюзивным для всех согласующихся словарных определений из большинства опубликованных в последнее время словарей Webster и Random House. Когда используются в данном документе, следующие определения применяются к следующим терминам или к часто встречающимся их разновидностям (например, сингулярные/множественные формы, прошлое/настоящее время, и т.д.):
"Примерно" со ссылкой на числовые значения, как правило, ссылается на плюс или минус 10% для объявленного значения. Например, если объявленное значение равно 4,375, тогда использование термина "примерно 4,375", в общем, означает диапазон между 3,9375 и 4,8125.
"И/или" является инклюзивным здесь, означая "и", также как "или". Например, "P и/или Q" охватывает P, Q и P вместе с Q; и такое "P и/или Q" может включать в себя также другие элементы.
"Антенна или антенная система", в общем, ссылается на электрическое устройство, или последовательность устройств, в любой подходящей конфигурации, которые преобразуют электрическую мощность в электромагнитное излучение. Такое излучение может быть либо вертикально, горизонтально, либо в круговом направлении поляризованным с любой частотой по электромагнитному спектру. Антенны, передающие с круговой полярностью, могут иметь либо правостороннюю, либо левостороннюю поляризацию. В случае радиоволн, антенна может передавать на частотах, находящихся в диапазоне электромагнитного спектра от очень низкой частоты (ELF) до очень высокой частоты (EHF). Антенна или антенная система, предназначенная передавать радиоволны, может содержать компоновку металлических проводников (элементов), электрически соединенных (часто через передающую линию) с приемником или передатчиком. Колеблющийся ток электронов, вызываемый через антенну передатчиком, может создавать колеблющееся магнитное поле вокруг элементов антенны, в то время как заряд электронов также создает колеблющееся электрическое поле вдоль элементов. Эти изменяющиеся во времени поля излучаются от антенны в пространство как движущаяся поперечная волна электромагнитного поля. Наоборот, во время приема, колеблющиеся электрические и магнитные поля входящей электромагнитной волны оказывают усилие на электроны в элементах антенны, вынуждающее их двигаться взад и вперед, создавая колеблющиеся токи в антенне. Эти токи могут затем быть обнаружены приемниками и обработаны, чтобы извлекать цифровые или аналоговые сигналы или данные. Антенны могут быть предназначены, чтобы передавать и принимать радиоволны практически одинаково во всех горизонтальных направлениях (всенаправленные антенны) или предпочтительно в конкретном направлении (направленные или имеющие высокий коэффициент усиления антенны). В последнем случае, антенна может также включать в себя дополнительные элементы или поверхности, которые могут или не могут иметь какое-либо физическое электрическое соединение с передатчиком или приемником. Например, паразитные элементы, параболические отражатели или рупоры, и другие такие неснабжаемые энергией элементы служат для направления радиоволн в пучок или другую желаемую диаграмму направленности излучения. Таким образом, антенны могут быть сконфигурированы, чтобы показывать повышенную или пониженную направленность или "коэффициент усиления" посредством размещения этих различных поверхностей или элементов. Антенны с высоким коэффициентом усиления могут быть сконфигурированы, чтобы направлять, по существу, большую долю излучаемой электромагнитной энергии в заданном направлении, которое может быть вертикальным, горизонтальным или любым их сочетанием. Антенны могут также быть сконфигурированы, чтобы излучать электромагнитную энергию в конкретном диапазоне вертикальных углов (т.е., "углов закрытия горизонта") относительно земли для того, чтобы фокусировать электромагнитную энергию в направлении верхнего слоя атмосферы, такого как ионосфера. Посредством направления электромагнитной энергии в направлении верхней атмосферы под конкретным углом, конкретные зоны молчания могут быть достигнуты в отдельные моменты времени дня посредством передачи электромагнитной энергии на отдельных частотах. Другие примеры антенн включают в себя излучатели и датчики, которые преобразуют электрическую энергию в импульсы электромагнитной энергии в видимом или невидимом световом фрагменте электромагнитного спектра. Примеры включают в себя светоизлучающие диоды, лазеры и т.п., которые конфигурируются, чтобы формировать электромагнитную энергию на частотах, находящихся в диапазоне электромагнитного спектра от дальней инфракрасной области до крайней ультрафиолетовой области.
"Линия связи", в общем, ссылается на соединение между двумя или более связывающимися сущность-объектами и может или не может включать в себя канал связи между связывающимися сущность-объектами. Связь между связывающимися сущность-объектами может происходить любым подходящим средством. Например, соединение может быть реализовано как фактическая физическая линия связи, электрическая линия связи, электромагнитная линия связи, логическая линия связи или любое другое подходящее соединение, обеспечивающее связь. В случае фактической физической линии связи, связь может происходить посредством множества компонентов в линии связи, сконфигурированных, чтобы отвечать друг другу путем физического перемещения одного элемента относительно другого. В случае электрической линии связи, линия связи может состоять из множества электрических проводников, электрически соединенных, чтобы формировать линию связи. В случае электромагнитной линии связи, элементы соединения могут быть реализованы посредством отправки или приема электромагнитной энергии с любой подходящей частотой, таким образом, предоставляя возможность сигналам связи проходить в качестве электромагнитных волн. Эти электромагнитные волны могут или не могут проходить через физическую среду, такую как оптическое волокно, или через свободное пространство, или любое их сочетание. Электромагнитные волны могут передаваться с любой подходящей частотой, включающей в себя любую частоту в электромагнитном спектре. В случае логической линии связи, линии связи могут быть концептуальным соединением между отправителем и получателем, таким как станция передачи в принимающей станции. Логическая линия связи может включать в себя любое сочетание физического, электрического, электромагнитно или других типов линий связи.
"Компьютер", в общем, ссылается на любое вычислительное устройство, сконфигурированное, чтобы вычислять результат из какого-либо множества входных значений или переменных. Компьютер может включать в себя процессор для выполнения вычислений, чтобы обрабатывать входные или выходные данные. Компьютер может включать в себя память для хранения значений, которые должны быть обработаны процессором, или для хранения результатов предыдущей обработки. Компьютер может также быть сконфигурирован, чтобы применять входные и выходные данные от широкого множества устройств ввода и вывода для приема или отправки значений. Такие устройства включают в себя другие компьютеры, клавиатуры, мыши, визуальные дисплеи, принтеры, промышленное оборудование и системы или механизмы всех типов и размеров. Например, компьютер может управлять сетью или сетевым интерфейсом, чтобы выполнять различные обмены данными по сети по запросу. Сетевой интерфейс может быть частью компьютера, или характеризуется как отдельный и удаленный от компьютера. Компьютер может быть единым, физическим, вычислительным устройством, таким как настольный компьютер, портативный компьютер, или может состоять из множества устройств одинакового типа, таких как группа серверов, работающих как одно устройство в сетевом кластере, или разнородное сочетание различных вычислительных устройств, работающих как один компьютер и связанных вместе сетью передачи данных. Сеть передачи данных, подключенная к компьютеру, может также быть подключена к более широкой сети, такой как Интернет. Таким образом, компьютер может включать в себя один или более физических процессоров или других вычислительных устройств или схем, и может также включать в себя любой подходящий тип памяти. Компьютер может также быть виртуальной вычислительной платформой, имеющей неизвестное или изменяющееся число физических процессоров и памяти или запоминающих устройств. Компьютер может, таким образом, быть физически расположен в одном географическом местоположении или физически распределен по нескольким широко разбросанным местоположениям, при этом множество процессоров связываются вместе сетью передачи данных, чтобы работать как единый компьютер. Понятие "компьютера" и "процессора" в компьютере или вычислительном устройстве также охватывает любой такой процессор или вычислительное устройство, служащее для выполнения вычислений или сравнений, как часть раскрытой системы. Операции обработки, относящиеся к сравнениям с пороговыми значениями, сравнениям с правилами, вычислениями и т.п., происходящими в компьютере, могут происходить, например, на отдельных серверах, одном и том же сервере с отдельными процессорами, или в виртуальном вычислительном окружении, имеющем неизвестное число физических процессоров, как описано выше. Компьютер может быть необязательно соединен с одним или более визуальными дисплеями и/или может включать в себя интегрированный визуальный дисплей. Аналогично, дисплеи могут быть одинакового типа, или разнородным сочетанием различных визуальных устройств. Компьютер может также включать в себя одно или более операторских устройств ввода, таких как клавиатура, мышь, сенсорный экран, лазерное или инфракрасное указывающее устройство, или гироскопическое указывающее устройство, чтобы назвать лишь несколько характерных примеров. Также, помимо дисплея, одно или более других устройств вывода могут быть включены, такие как принтер, плоттер, промышленная производственная машина, 3D-принтер и т.п. По существу, различные компоновки устройств отображения, ввода и вывода являются возможными. Множество компьютеров или вычислительных устройств могут быть сконфигурированы, чтобы связываться друг с другом или с другими устройствами по проводным или беспроводным линиям связи, чтобы формировать сеть. Сетевые обмены данными могут проходить через различные компьютеры, работающие в качестве сетевых устройств, такие как коммутаторы, маршрутизаторы, брандмауэры или другие сетевые устройства или интерфейсы, перед прохождением через другие более крупные компьютерные сети, такие как Интернет. Обмены данными могут также проходить по сети как беспроводные передачи данных, выполняемые через электромагнитные волны по линиям передачи или через свободное пространство. Такие обмены данными включают в себя использование Wi-Fi или другой беспроводной локальной вычислительной сети (WLAN) или сотовый передатчик/приемник для передачи данных.
"Участок с постоянной скоростью", когда используется в данном документе, означает фрагмент проекции скорости плавного перемещения, который удерживается постоянным, т.е., значение скорости не изменяется. Графически, это представляется горизонтальной линией, когда ось Y графика представляет скорость, а ось X представляет время или перемещение.
"Управляющий сигнал", когда используется в данном документе, означает сигнал, применяемый к управляемому объекту из контроллера. Сигнал может быть проводным или нет. Сигнал может быть электрическим, электронным, оптическим, RF или иным. Примеры управляющих сигналов включают в себя электрические или оптические сигналы с широтно-импульсной модуляцией, частотной модуляцией и амплитудной модуляцией. Управляющие сигналы могут необязательно также содержать электрическую мощность, предоставляемую объекту.
"Динамически регулировать", когда используется в данном документе, означает регулировать нечто в или очень близко ко времени, когда оно перемещается или изменяется.
"Электромотор", когда используется в данном документе, означает электрическую машину, которая преобразует электрическую энергию во вращающую механическую энергию. Примеры электромоторов включают в себя щеточные DC-моторы, бесщеточные DC-моторы, некоммутированные DC-моторы, DC-моторы с постоянным магнитом, синхронные AC-моторы, индукционные AC-моторы и шаговые моторы.
"Огибающая", когда используется в данном документе, означает представление области между двумя кривыми на графике. Одна из упомянутых кривых представляет минимальные значения, а другая - максимальные значения. Когда используется для определения проекции скорости плавного перемещения для объекта, огибающая определяет область, представляющую набор целевых значений для скорости объекта.
"Множественный", когда используется в данном документе, является синонимичным с термином "множество" и ссылается на более чем один, или путем наращивания, два или более.
"Сеть" или "компьютерная сеть", в общем, ссылается на телекоммуникационную сеть, которая предоставляет возможность компьютерам обмениваться данными. Компьютеры могут передавать данные друг другу по информационным соединением путем преобразования данных в совокупность дейтаграмм или пакетов. Соединения между компьютерами и сетью могут быть установлены с помощью либо кабелей, оптических волокон, либо через электромагнитные передачи, такие как для беспроводных сетевых устройств. Компьютеры, соединенные с сетью, могут называться "узлами" или "хостами" и могут порождать, транслировать, маршрутизировать или принимать данные из сети. Узлы могут включать в себя любое вычислительное устройство, такое как персональные компьютеры, телефоны и серверы, также как специализированные компьютеры, которые работают, чтобы поддерживать поток данных через сеть, называемые "сетевыми устройствами". Два узла считаются "связанными сетью вместе", когда одно устройство способно обмениваться информацией с другим устройством независимо от того, имеют ли они или нет прямое соединение друг с другом. Примеры проводных сетевых соединений могут включать в себя цифровые абонентские линии (DSL), коаксиальные кабельные линии или оптоволоконные линии. Сетевые соединения могут включать в себя BLUETOOTH®, широкополосный доступ в микроволновом диапазоне (WiMAX), инфракрасный канал или спутниковый диапазон, или любую беспроводную локальную вычислительную сеть (Wi-Fi), такую как сеть, реализованная с помощью стандартов Института инженеров по электротехнике и электронике (IEEE) 802.11 (например, 802.11(a), 802.11(b), 802.11(g) или 802.11(n), среди прочих). Беспроводные линии связи могут также включать в себя или использовать любые стандарты сотовой сети, используемые для связи между мобильными устройствами, включающие в себя 1G, 2G, 3G, 4G или 5G. Сетевые стандарты могут квалифицироваться как 1G, 2G и т.д., удовлетворяя спецификации или стандартам, таким как спецификации, поддерживаемые Международным телекоммуникационным союзом (ITU). Например, сеть может называться "3G-сетью", если она удовлетворяет критериям в спецификации Международная мобильная связь-2000 (IMT-2000) независимо от того, на что она может в ином случае ссылаться. Сеть может называться "4G-сетью", если она удовлетворяет требованиям расширенной спецификации Международной мобильной связи (IMTAdvenced). Примеры стандартов сотовой сети или других беспроводных стандартов включают в себя AMPS, GSM, GPRS, UMTS, LTE, LTE Advanced, Mobile WiMAX и WiMAX-Advanced. Стандарты сотовой связи могут использовать различные способы доступа к каналу, такие как FDMA, TDMA, CDMA или SDMA. Различные типы данных могут передаваться по различным линиям связи и стандартам, или одинаковые типы данных могут передаваться по различным линиям связи и стандартам. Географические рамки сети могут широко изменяться. Примеры включают в себя нательную компьютерную сеть (BAN), персональную вычислительную сеть (PAN), локальную вычислительную сеть (LAN), городскую вычислительную сеть (MAN), глобальную вычислительную сеть (WAN) или Интернет. Сеть может иметь любую подходящую топологию сети, определяющую число и использование сетевых соединений. Топология сети может быть любой подходящей формы и может включать в себя соединение точка-точка, шину, звезду, кольцо, ячеистую сеть или дерево. Сеть может быть наложенной сетью, которая является виртуальной и конфигурируется как один или более слоев, которые используют или "лежат поверх" других сетей. Сеть может использовать различные протоколы связи или способы обмена сообщениями, включающие в себя уровни или стеки протоколов. Примеры включают в себя протокол Ethernet, стек протоколов Интернета (TCP/IP), метод ATM (асинхронный режим передачи), протокол SONET (синхронное оптическое сетевое взаимодействие) или протокол SDE1 (синхронная цифровая иерархия). Стек протоколов Интернета TCP/IP может включать в себя уровень приложения, транспортный уровень, уровень Интернета (включающий в себя, например, IPv6) или канальный уровень.
"Нелинейная скорость", когда используется в данном документе, означает скорость, которая изменяется.
"Необязательно", когда используется в данном документе, означает предоставленный на усмотрение; не требуемый; возможный, но не обязательный; оставленный на персональный выбор.
"Предварительно определенный", когда используется в данном документе, означает установленный заранее. Это включает в себя предварительно запрограммированный и/или сохраненный в ROM, PROM или другой компьютерной памяти. Это также включает в себя компоненты, которые используются для хранения значений, такие как делители напряжения, резисторы или другие дискретные компоненты.
"Функция пропорционально-интегрально-дифференциального регулирования", когда используется в данном документе, означает механизм обратной связи контура управления, который вычисляет значение "ошибки" как разницу между измеренной переменной процесса (такой как скорость спинки сиденья) и желаемым заданным значением (таким как профиль скорости для плавного движения). Функция пытается минимизировать ошибку, регулируя выходные данные управления процессом (такие как управляющий сигнал для привода).
"Преобладающим образом", когда используется в данном документе, является синонимом с более чем 50%.
"Удаленный", в общем, ссылается на какое-либо физическое, логическое или другое разделение между двумя вещями. Разделение может быть относительно большим, таким как тысячи или миллионы миль или километров, или небольшим, таким как нанометры или миллионные части дюйма. Две вещи, "удаленные" друг от друга, могут также быть логически или физически связанными или соединенными вместе.
"Сиденье", в общем, ссылается на тип поддерживающей конструкции или место, сконструированное с целью предоставления возможности человеку и/или другому животному сидеть. Некоторые примеры сидений включают в себя кресла, стулья, скамьи, седла и софы, среди прочего. Типично, но не всегда, сиденье может дополнительно включать в себя спинку сиденья, подлокотник и подголовник, также как другие детали.
"Датчик", когда используется в данном документе, означает устройство, которое обнаруживает или измеряет параметр скорости и записывает, указывает или иначе реагирует на это. Примеры датчиков включают в себя, но не только, датчик на эффекте Холла, потенциометр, кодер (линейный, ротационный и/или оптический), акселерометр, датчик наклона, дальномер, инклинометр, фотодиод, датчик движения или сочетание любых из предыдущих.
"Единый набор целевых значений", когда используется в данном документе, означает, что, в отличие от подхода с огибающей, проекция скорости для плавного перемещения представляется одной кривой или линией или графиком, когда изображается графически. Он содержит все целевые значения для скорости объекта, которому проекция скорости для плавного перемещения принадлежит.
"Параметр скорости", когда используется в данном документе, означает физический атрибут, который может быть измерен, чтобы получать скорость (линейную, криволинейную или поворотную) объекта. Примеры параметров скорости включают в себя скорость, вектор скорости, ускорение, перемещение и/или позицию.
"Транспортное средство", в общем, ссылается на машину, которая перевозит людей и/или груз. Широко известные типы транспортных средств могут включать в себя наземные транспортные средства, транспортные средства-амфибии, судно, летательный аппарат и космический летательный аппарат. В качестве неограничивающих примеров, наземные транспортные средства могут включать в себя фургоны, прицепы, мотороллеры, велосипеды, мотоциклы, автомобили, автобусы, грузовики, полуприцепы, поезда, троллейбусы и трамваи. Транспортные средства-амфибии могут, например, включать в себя судно на воздушной подушке и прогулочные автобусы-амфибии, и судно может включать в себя корабли, лодки и подводные лодки, среди прочего. Широко распространенные формы летательного аппарата включают в себя самолеты, вертолеты, автожиры и воздушные шары, а космический летательный аппарат, например, может включать в себя ракеты и летательный аппарат с ракетным двигателем. Транспортное средство может иметь многочисленные типы источников питания. Например, транспортное средство может снабжаться энергией посредством продвижения человека, снабжаться электрической энергией, снабжаться энергией посредством химического сгорания, снабжаться ядерной энергией и/или снабжаться солнечной энергией. Направление, вектор скорости и работа транспортного средства могут управляться человеком, управляться автономно и/или управляться полуавтономно. Примерно автономно или полуавтономно управляемых транспортных средств включают в себя автоматически направляемые транспортные средства (AGV) и дроны.
"Торможение транспортного средства" означает, в ответ на, непосредственно или опосредованно, применение ножного тормоза транспортного средства, замедление или остановку транспортного средства.
Группа изобретений относится к сиденью транспортного средства. Система посадки в транспортном средстве для снижения усталости пользователя содержит сиденье, имеющее спинку сиденья и нижнюю часть сиденья, привод для регулировки сиденья для перемещения спинки сиденья и нижней части сиденья между первым и вторым положениями, и контроллер для автоматического управления перемещением снабжаемого энергией привода для регулировки сиденья. Контроллер регулирует перемещение спинки сиденья и нижней части сиденья на основе алгоритма регулировки сиденья. Алгоритм регулировки спинки сиденья и нижней части сиденья выполнен с возможностью регулировки положения спинки сиденья и нижней части сиденья для снижения позиционной усталости на основе сочетания данных о транспортном средстве и пассажире. Алгоритм регулировки сиденья содержит период управления, включающий в себя период перемещения и неподвижный период. Данные о транспортном средстве и пассажире беспроводным образом передаются удаленному устройству для создания алгоритма регулировки сиденья. Алгоритм регулировки сиденья беспроводным образом передается контроллеру из удаленного устройства. Достигается уменьшение усталости пользователя. 2 н. и 23 з.п. ф-лы, 12 ил.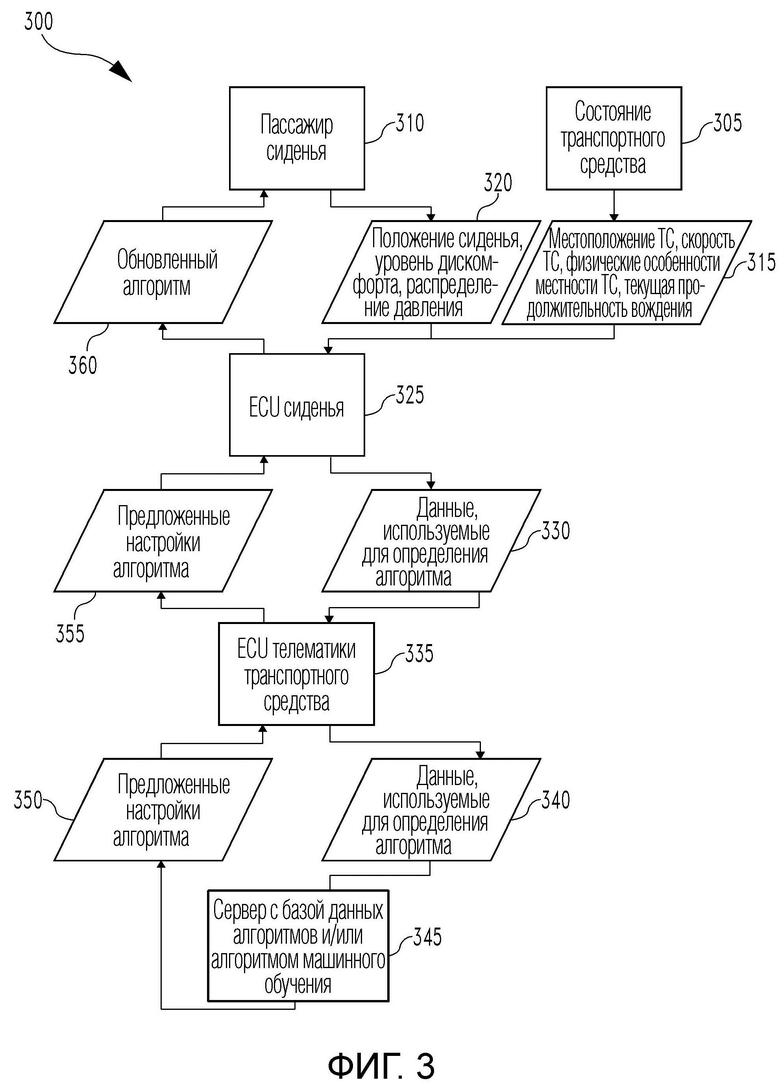
1. Система посадки в транспортном средстве для снижения усталости пользователя, содержащая:
сиденье, имеющее спинку сиденья и нижнюю часть сиденья;
первый снабжаемый энергией привод для регулировки сиденья, чтобы перемещать упомянутую спинку сиденья, наклонять вперед и назад между по меньшей мере первым положением спинки сиденья и вторым положением спинки сиденья, при этом упомянутый первый снабжаемый энергией привод для регулировки сиденья включает в себя электромотор;
и контроллер для автоматического управления перемещением упомянутого первого снабжаемого энергией привода для регулировки сиденья, причем упомянутый контроллер регулирует перемещение упомянутой спинки сиденья на основе алгоритма регулировки сиденья, причем алгоритм регулировки сиденья выполнен с возможностью регулировки положения спинки сиденья для снижения позиционной усталости на основе сочетания данных о транспортном средстве и пассажире, при этом алгоритм регулировки сиденья содержит период управления, включающий в себя по меньшей мере один период перемещения и по меньшей мере один неподвижный период;
причем упомянутые данные о транспортном средстве и пассажире беспроводным образом передаются удаленному устройству для создания алгоритма регулировки сиденья; и
при этом алгоритм регулировки сиденья беспроводным образом передается контроллеру из удаленного устройства.
2. Система по п. 1, в которой данные о транспортном средстве включают в себя состояние вождения транспортного средства.
3. Система по п. 2, в которой состояние вождения транспортного средства включает в себя скорость транспортного средства, тип вождения, продолжительность вождения и/или дорожные условия.
4. Система по п. 3, в которой регулировка является динамической регулировкой.
5. Система по п. 3, в которой состояние вождения транспортного средства включает в себя дорожные условия, причем дорожные условия включают в себя выпадение атмосферных осадков.
6. Система по п. 1, в которой данные о транспортном средстве включают в себя отличительные особенности транспортного средства.
7. Система по п. 6, в которой отличительные особенности транспортного средства включают в себя расстояние от нижней части сиденья до поверхности дороги, тип хода подвески и/или тип транспортного средства.
8. Система по п. 1, в которой данные о пассажире включают в себя биометрическую информацию пассажира.
9. Система по п. 8, в которой биометрическая информация пассажира включает в себя вес, возраст, медицинскую историю, рост и/или уровень усталости.
10. Система по п. 1, в которой данные о пассажире включают в себя информацию о положении пассажира.
11. Система по п. 10, в которой информация о положении пассажира включает в себя положение зеркала заднего вида, положение зеркала бокового вида, положение педали тормоза, положение педали газа, положение педали сцепления, положение рулевого колеса, положение привода для регулировки сиденья, местоположение сиденья пассажира и/или распределение веса на сиденье.
12. Система по п. 1, в которой данные о пассажире включают в себя информацию обратной связи пассажира.
13. Система по п. 12, в которой информация обратной связи пассажира включает в себя прямую обратную связь и/или ручную регулировку.
14. Система по п. 13, в которой прямая обратная связь включает в себя выбор пользователем значка "большой палец вверх" или "большой палец вниз" в информационно-развлекательной системе транспортного средства в ответ на алгоритм регулировки сиденья.
15. Система по п. 1, в которой алгоритм регулировки сиденья модифицирует частоту срабатывания, величину срабатывания, перемещение срабатывания и/или направление срабатывания.
16. Система по п. 1, в которой сиденье включает в себя систему подогрева и охлаждения сиденья, и при этом система подогрева и охлаждения сиденья управляется посредством алгоритма регулировки сиденья.
17. Система по п. 1, в которой контроллер соединяется с Интернетом по 5G-связи, и при этом алгоритм регулировки сиденья обновляется через упомянутое 5G-соединение.
18. Система по п. 1, в которой контроллер соединяется с Интернетом в определенных пользователем местоположениях, и при этом алгоритм регулировки сиденья обновляется при нахождении в определенных пользователем местоположениях.
19. Система по п. 18, в которой определенное пользователем местоположение является домом пользователя.
20. Система по п. 19, в которой определенное пользователем местоположение является рабочим местом пользователя.
21. Система по п. 1, в которой пассажир выбирает предварительно заданный алгоритм регулировки сиденья из локальной базы данных.
22. Система по п. 1, в которой алгоритм регулировки сиденья может отвергаться ручной регулировкой сиденья.
23. Система по п. 17, в которой отвержение алгоритма регулировки сиденья сохраняется в удаленном устройстве в качестве пользовательского предпочтения регулировки сиденья.
24. Система по п. 23, в которой пользовательские предпочтения регулировки сиденья являются переносимыми между транспортными средствами.
25. Система посадки в транспортном средстве для снижения усталости пользователя, содержащая:
сиденье, имеющее спинку сиденья и нижнюю часть сиденья;
первый снабжаемый энергией привод для регулировки сиденья, чтобы перемещать упомянутую нижнюю часть сиденья, наклонять вверх и вниз между по меньшей мере первым положением нижней части сиденья и вторым положением нижней части сиденья, при этом упомянутый первый снабжаемый энергией привод для регулировки сиденья включает в себя электромотор; и
контроллер для автоматического управления перемещением упомянутого первого снабжаемого энергией привода для регулировки сиденья, причем упомянутый контроллер динамически регулирует перемещение упомянутой нижней части сиденья на основе алгоритма регулировки сиденья, причем алгоритм регулировки сиденья выполнен с возможностью регулировки положения нижней части сиденья для снижения позиционной усталости на основе сочетания данных о транспортном средстве и пассажире, при этом алгоритм регулировки сиденья содержит период управления, включающий в себя по меньшей мере один период перемещения и по меньшей мере один неподвижный период;
причем упомянутые данные о транспортном средстве и пассажире беспроводным образом передаются удаленному устройству для создания алгоритма регулировки сиденья; и
при этом алгоритм регулировки сиденья беспроводным образом передается контроллеру из удаленного устройства.
| US 2012086249 A1, 12.04.2012 | |||
| US 2021016686 A1, 21.01.2021 | |||
| US 2019366878 A1, 05.12.2019 | |||
| US 2021331605 A1, 28.10.2021 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2678459C2 |

