ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение, в общем, относится к сиденьям транспортных средств, и, в частности, к контролю положения сиденья транспортного средства и позы водителя или пассажира на сиденье транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Вождение автотранспортного средства представляет собой ежедневную деятельность для многих людей, и для некоторых включает в себя длительные периоды времени, проведенные на сиденье транспортного средства. Неправильная сидячая поза при вождении транспортного средства может создавать периодически повторяющуюся нагрузку, которая вызывает постоянное напряжение. Например, неправильная поза может вызывать напряжение мышц и связок, повышая уязвимость водителя к травмам. Кроме того, неправильное положение позвоночника может уменьшать пространство между соседними позвонками, тем самым повышая риск защемления нервов. Нахождение в неправильной позе в течение длительного периода времени может приводить к скелетно-мышечным заболеваниям, например, боли в шее, плечах и спине, и влиять на работу других систем организма (например, пищеварение, кровообращение, суставы и т.д.). С другой стороны, физические усилия, необходимые для поддержания правильной сидячей позы в течение долгого периода времени, могут приводить к мышечной усталости, а также провоцировать боли в шее и спине. Подгонка сиденья транспортного средства под тело водителя (например, надлежащая эргономичная настройка), а также выбор надлежащего положения сиденья могут улучшать позу водителя и способствовать уменьшению боли, дискомфорта и мышечной усталости, что также повышает продуктивность водителя при вождении транспортного средства.
[0003] Многие транспортные средства включают в себя один или более элементов управления сиденьем для регулировки положения водительского сиденья и в некоторых случаях одного или более пассажирских сидений. Например, элементы управления сиденьем могут позволять регулировку высоты подголовника, угла наклона спинки сиденья, высоты сиденья, длины сиденья, угла наклона подушки сиденья и/или поясничной опоры в спинке сиденья. Надлежащее положение сиденья или соответствующие настройки таких элементов управления сиденьем могут отличаться для разных водителей в зависимости от параметров тела человека (например, роста и габаритов). Однако несколько общих принципов могут помочь при подгонке сиденья к телу водителя.
[0004] Например, высота сиденья может быть выбрана так, чтобы колени водителя были согнуты под углом 90 градусов, когда ступни водителя находятся на полу транспортного средства. Также в общем рекомендуется, чтобы колени не были выше бедер водителя. Однако высоким водителям может потребоваться поднять переднюю часть сиденья (например, путем наклонна вверх), пока сиденье не будет соприкасаться с коленями. С другой стороны, в условиях вождения, требующих частого использования сцепления, водителю может потребоваться опустить переднюю часть сиденья (например, путем наклона вниз) для обеспечения более удобного доступа к сцеплению. В качестве другого примера, камера поясничной опоры, при наличии, считается правильно размещенной (например, наполненной), когда она соприкасается со спиной водителя и обеспечивает устойчивый, но комфортный уровень поддержки спины. В качестве дополнительного примера, рекомендуется, чтобы сиденье было размещено с небольшим наклоном спины водителя назад так, чтобы угол между спиной и бедрами составлял 100-110 градусов, чтобы способствовать сохранению правильной позы при вождении.
[0005] Хотя существующие элементы управления сиденьем позволяют водителю транспортного средства выбирать более комфортное положение сиденья, они не способны предлагать водителю эргономически целесообразное положение сиденья, а также обеспечивать обратную связь при выборе неправильного положения сиденья. Некоторые существующие системы транспортного средства контролируют позу водителей или других пассажиров транспортного средства и обеспечивают предупреждение или звуковой сигнал при обнаружении неправильной позы. Однако эти существующие системы не способны идентифицировать ненадлежащее положение сиденья и обеспечивать изменения положения сиденья для улучшения позы водителя и/или достижения надлежащего положения сиденья. Соответственно в уровне техники по-прежнему существует необходимость систем и способов для транспортного средства, которые могут контролировать положение сиденья и позу водителя или пассажира транспортного средства и корректировать ненадлежащее положение сиденья и/или неправильную позу водителя или пассажира.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Изобретение направлено на решение вышеупомянутых и других проблем путем обеспечения систем и способов, выполненных с возможностью (1) контроля положения сиденья и позы водителя или другого пассажира транспортного средства с использованием одного или более датчиков, расположенных в сиденье транспортного средства и (2) при обнаружении состояния ненадлежащего положения сиденья или неправильной позы вывода сигнала управления для корректировки обнаруженного состояния.
[0007] Например, один вариант выполнения обеспечивает транспортное средство, содержащее сиденье, первый датчик, соединенный с сиденьем для определения угла сиденья, и процессор, соединенный с возможностью связи с первым датчиком и сиденьем и выполненный с возможностью вывода сигнала управления для корректировки угла сиденья, если угол сиденья находится вне заданного диапазона значений. Другой примерный вариант выполнения включает в себя способ корректировки положения сиденья транспортного средства с сидящим на нем водителем или пассажиром. Способ содержит этапы, на которых принимают процессором выходные данные, определенные блоком датчиков, соединенным с сиденьем; сравнивают с использованием процессора выходные данные с заданным порогом для определения, существует ли тревожное состояние; если существует, выводят сигнал управления для корректировки положения сиденья, причем блок датчиков включает в себя датчик углового положения.
[0008] Следует понимать, что настоящее изобретение определяется приложенной формулой изобретения. Описание обобщает аспекты вариантов осуществления и не должно использоваться для ограничения формулы изобретения. Другие реализации рассматриваются в соответствии с описанными в настоящем документе технологиями, которые будут понятны специалисту в области техники при изучении следующих далее чертежей и подробного описания, и такие реализации находятся в пределах объема охраны настоящей заявки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Для лучшего понимания изобретения может быть сделана ссылка на варианты осуществления, показанные на следующих далее чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и связанные элементы могут быть не показаны, или в некоторых примерах пропорции могут быть преувеличены так, чтобы подчеркнуть и наглядно проиллюстрировать новые описанные в настоящем документе признаки. В дополнение компоненты системы могут быть расположены различным образом, известным в уровне техники. Дополнительно на чертежах одинаковые ссылочные позиции обозначают соответствующие части на всех различных видах.
[00010] Фиг. 1 представляет собой иллюстрацию примерной системы контроля сиденья транспортного средства, связанной с примерным транспортным средством, в соответствии с некоторыми вариантами осуществления.
[00011] Фиг. 2 представляет собой иллюстрацию примерного сиденья транспортного средства, содержащего один или более компонентов системы контроля сиденья транспортного средства на Фиг. 1, в соответствии с некоторыми вариантами осуществления.
[00012] Фиг. 3 представляет собой иллюстрацию примерного уведомления, генерируемого системой контроля сиденья транспортного средства на Фиг. 1, в соответствии с некоторыми вариантами осуществления.
[00013] Фиг. 4A-4C представляют собой иллюстрации дополнительных примерных уведомлений, генерируемых системой контроля сиденья транспортного средства на Фиг. 1, в соответствии с некоторыми вариантами осуществления.
[00014] Фиг. 5 представляет собой структурную схему, показывающую примерную вычислительную систему транспортного средства, содержащую систему контроля сиденья транспортного средства на Фиг. 1, в соответствии с некоторыми вариантами осуществления.
[00015] Фиг. 6 представляет собой блок-схему последовательности операций примерного способа контроля и корректировки положения сиденья и позы водителя или пассажира транспортного средства в соответствии с некоторыми вариантами осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[00016] Хотя изобретение может быть выполнено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие следует рассматривать как иллюстративный пример изобретения, а не как ограничение изобретения конкретными проиллюстрированными вариантами осуществления.
[00017] В настоящей заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование формы единственного числа не предназначено для указания количества элементов. В частности, ссылка на объект в единственном числе предназначена для обозначения одного из возможного множества таких объектов.
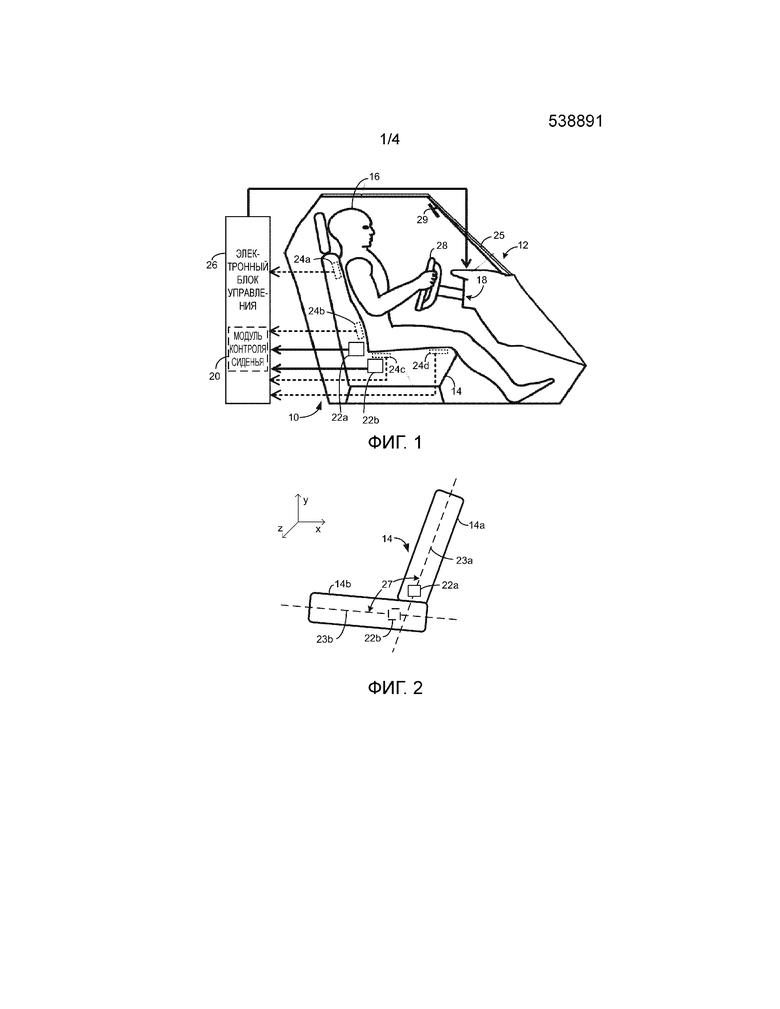
[00018] Фиг. 1 иллюстрирует примерную систему 10 контроля сиденья транспортного средства, встроенную в транспортное средство 12, в соответствии с вариантами осуществления. Система 10 контроля сиденья выполнена с возможностью контроля одного или более аспектов сиденья 14 транспортного средства, занятого водителем или пассажиром 16 транспортного средства (таким как, например, водитель транспортного средства) и обнаружения тревожного состояния при идентификации ненадлежащего или неправильного положения сиденья и/или неправильной позы водителя или пассажира 16. Система 10 контроля сиденья дополнительно выполнена с возможностью вывода сигнала управления для корректировки положения сиденья и/или позы водителя или пассажира или устранения тревожного состояния иным образом. В некоторых вариантах осуществления сигнал управления вызывает отображение транспортным средством 12 на дисплее 18 транспортного средства одного или более уведомлений для оповещения или предупреждения водителя или пассажира 16 транспортного средства о тревожном состоянии и предложения корректировки положения сиденья и/или позы водителя или пассажира для устранения тревожного состояния. В других вариантах осуществления сигнал управления вызывает автоматическую корректировку сиденьем 14 транспортного средства положения сиденья так, что тревожное состояние устраняется. В еще других вариантах осуществления сигнал управления вызывает ограничение транспортным средством 12 действия водителя 16 транспортного средства (такого как, например, переключение транспортного средство 12 на передачу переднего хода) до тех пор, пока тревожное состояние не будет устранено. Система 10 контроля сиденья может быть соединена с возможностью связи с вычислительной системой транспортного средства (такой как, например, вычислительная система 100 транспортного средства (VCS), показанная на Фиг. 5) транспортного средства 12 для выполнения этих и других признаков изобретения. В вариантах осуществления компоненты системы 10 контроля сиденья транспортного средства могут обмениваться данными друг с другом и/или с компонентами вычислительной системы с использованием проводных или беспроводных соединений. Система 10 контроля сиденья транспортного средства может включать в себя передатчик (не показан) для беспроводной передачи выходных сигналов другим компонентам при беспроводном сообщении.
[00019] В вариантах осуществления система 10 контроля сиденья включает в себя модуль 20 контроля сиденья, соединенный с возможностью связи с одним или более датчиками сиденья для определения положения сиденья и/или позы водителя или пассажира 16. Один или более датчиков сиденья могут включать в себя угловые датчики 22 и/или датчики 24 контакта, которые описаны более подробно ниже. Как показано, выходные данные одного или более датчиков 22 и/или 24 сиденья могут передаваться в электронный блок 26 управления (ECU) или другой электронный процессор данных, который выполнен с возможностью выполнения модуля 20 контроля сиденья, например, с использованием программных инструкций, сохраненных в памяти вычислительной системы транспортного средства или системы 10 контроля сиденья. Согласно вариантам выполнения ECU 26 может быть встроен в систему 10 контроля сиденья или в вычислительную систему транспортного средства 12.
[00020] Различные компоненты системы 10 контроля сиденья могут быть встроены в сиденье 14, другое сиденье транспортного средства 12, вычислительную систему транспортного средства 12 или другую часть транспортного средства 12. Например, в вариантах осуществления датчики 22 и/или 24 сиденья могут быть включены или встроены в сиденье 14, как показано на Фиг. 1, и модуль 20 контроля сиденья может содержать программные модули или программные инструкции, сохраненные в устройстве хранения данных (таком как, например, устройство 102 хранения данных, показанное на Фиг. 5) и выполняемые процессором данных (таким как, например, процессор 104 данных, показанный на Фиг. 5) вычислительной системы транспортного средства, которая описана более подробно ниже. В других случаях модуль 20 контроля сиденья может храниться и выполняться системой 10 контроля сиденья.
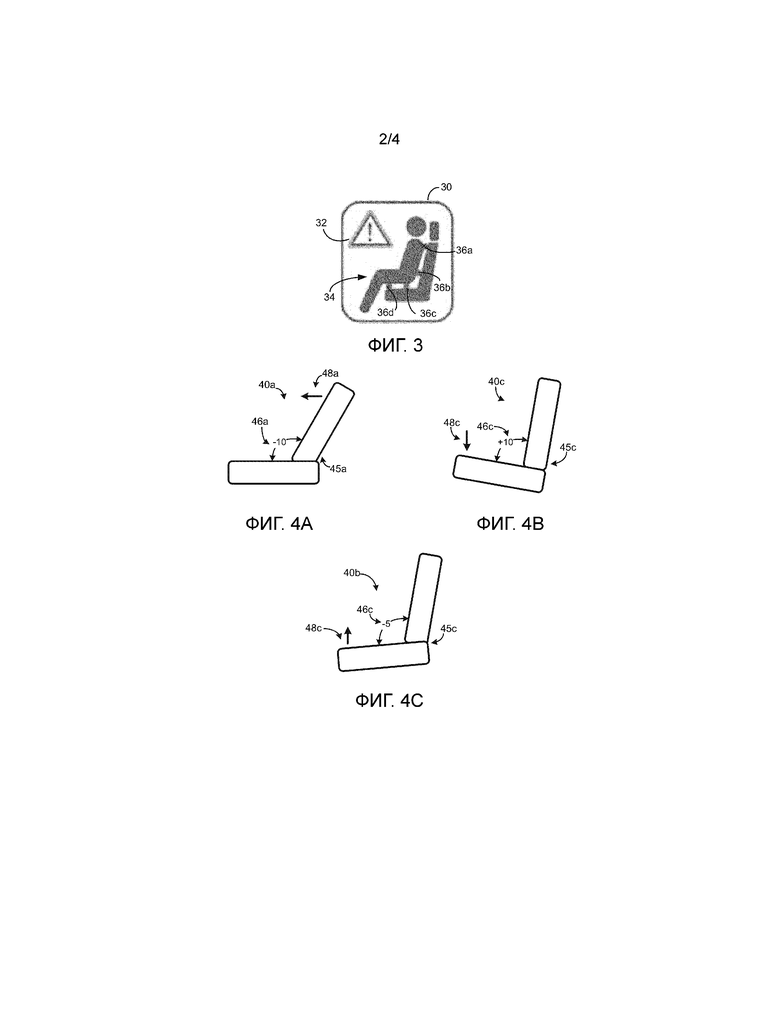
[00021] Как показано на Фиг. 1 и 2 датчик(и) сиденья в сиденье 14 включает в себя по меньшей мере один угловой датчик 22 (также называемый здесь «датчик углового положения») для определения угла 27 сиденья 14, а именно углового отношения между спинкой 14a сиденья и подушкой 14b сиденья 14. Как показано, подушка 14b сиденья может представлять собой в общем плоскую и горизонтальную поверхность для размещения на ней водителя или пассажира 16, и спинка 14a сиденья может быть соединена с подушкой 14b сиденья для обеспечения в общем плоской и вертикальной поверхности для поддержания спины водителя или пассажира 16. В вариантах осуществления угол 27 сиденья может регулироваться путем наклона спинки 14a сиденья вперед или назад и/или путем наклона подушки 14b сиденья вверх или вниз. Угол 27 сиденья 14 может использоваться ECU 26 для определения, является ли выбранное положение сиденья 14 надлежащим или ненадлежащим. В вариантах осуществления надлежащее положение сиденья может быть связано с заданным пороговым значением или диапазоном значений угла 27 сиденья, и ECU 26 может быть выполнен с возможностью определения, находится ли определенный угол 27 сиденья в пределах заданного порогового значения или диапазона. Например, в предпочтительном варианте выполнения положение сиденья считается надлежащим, когда угол 27 сиденья находится в пределах диапазона 100-110 градусов или другого эргономически целесообразного порогового значения(ий).
[00022] В некоторых вариантах осуществления по меньшей мере один угловой датчик 22 включает в себя первый угловой датчик 22а для определения угла или наклона спинки 14a сиденья относительно неподвижной оси, такой как, например, ось х, и второй угловой датчик 22b для определения угла или наклона подушки 14b сиденья относительно другой неподвижной оси, такой как, например, ось y. Первый угловой датчик 22а может быть расположен вдоль или параллельно оси 23а вращения спинки 14a сиденья, а второй угловой датчик 22b может быть расположен вдоль или параллельно оси 23b вращения подушки 14b сиденья. В таком случае выходные значения каждого датчика 22а, 22b могут быть переданы в ECU 26 или другой электронный процессор данных для вычисления углового отношения между спинкой 14a сиденья и подушкой 14b сиденья.
[0023] В других вариантах осуществления по меньшей мере один угловой датчик 22 включает в себя только первый угловой датчик 22а для определения угла наклона спинки 14a сиденья относительно заданной оси, такой как, например, ось х или ось, проходящая параллельно подушке 14b сиденья или полу транспортного средства 12. В таком случае угол наклона подушки 14b сиденья может быть зафиксирован на заданном значении, и ECU 26 может использовать фиксированное значение и выходное значение первого углового датчика 22а для вычисления углового отношения между спинкой 14a сиденья и подушкой 14b сиденья.
[00024] Угловой(ые) датчик(и) 22 может(могут) использовать любой тип технологии измерения углов, включая, например, потенциометр, кодовый датчик положения, дифференциальный трансформатор для измерения линейных перемещений (LVDT) или другой датчик для измерения углового положения. В некоторых случаях угловой(ые) датчик(и) 22 может(могут) быть выполнен(ы) с возможностью измерения или определения угла 27 сиденья и вывода угла 28 в ECU 26. Например, угловой(ые) датчик(и) 22 может(могут) быть выполнен(ы) с возможностью непосредственного измерения угла или наклона спинки 14a сиденья и/или подушки 14b сиденья и вывода измеренного угла 28. В других случаях необработанные значения, определенные угловым(ыми) датчиком(ами) 22, могут быть переданы в ECU 26 для вычисления углового отношения или угла 27 сиденья. Например, угол 27 сиденья может быть вычислен ECU 26 путем сравнения первого выходного значения, принятого от углового датчика 22а, со вторым выходным значением, принятым от углового датчика 22b.
[00025] В некоторых вариантах осуществления угловой(ые) датчик(и) 22 может(могут) быть соединен(ы) с одним или более элементами управления положением сиденья (такими как, например, элементы, встроенные в блок 116 управления сиденьем, показанные на Фиг. 5) и выполнен(ы) с возможностью определения угла наклона спинки 14a сиденья и/или подушки 14b сиденья на основании положения сиденья, выбранного водителем или пассажиром 16. Например, сиденье 14 транспортного средства и/или блок 116 управления сиденьем может включать в себя элемент управления регулировкой спинки сиденья (не показан) и/или элемент управления регулировкой подушки сиденья (не показан) для обеспечения водителю или пассажиру 16 возможности регулировки положения сиденья. Настройки, выбранные для каждого из этих элементов управления, могут использоваться для генерации выходных данных для углового(ых) датчика(ов) 22. Например, если элемент управления регулировкой спинки сиденья представляет собой ручку, направление поворота (например, по часовой стрелке или против часовой стрелки) и число оборотов ручки в каждом направлении могут быть переведены в выбранный угол наклона спинки 14a сиденья. В качестве другого примера, если элемент управления регулировкой подушки сиденья включает в себя пару кнопок (например, кнопку увеличения и кнопку уменьшения), число нажатий каждой кнопки может быть переведено в выбранный угол наклона подушки 14b сиденья. Следует понимать, что подобные технологии могут быть использованы для определения выбранного угла, если один из элементов управления регулировкой сиденья представляет собой рычаг, сенсорную панель или другую контактную технологию, или любой другой тип устройства ввода.
[00026] Снова обратимся к Фиг. 1, в некоторых вариантах осуществления датчик(и) сиденья также включает в себя один или более датчиков 24 контакта, расположенных в разных местах на сиденье 14 для обнаружения контакта между водителем или пассажиром 16 и каждым местом на сиденье. В таких вариантах осуществления выходные данные датчика(ов) 24 контакта могут быть использованы ECU 26 для определения, находится ли водитель или пассажир 16 в правильной позе или неправильной позе. Например, правильная поза может быть связана с наличием надлежащего контакта между водителем или пассажиром 16 и каждым из датчиков 24 контакта.
[00027] Согласно некоторым вариантам выполнения датчик(и) 24 контакта может быть расположен в спинке 14a сиденья и выполнен с возможностью обнаружения контакта водителя или пассажира с одним или более местами на спинке 14a сиденья и/или может быть расположен в подушке 14b сиденья для обнаружения контакта водителя или пассажира с одним или более местами на подушке 14b сиденья. Например, как показано на Фиг. 1, датчик(и) 24 контакта может включать в себя по меньшей мере один из датчика 24а плечевой области, расположенного смежно ожидаемому местоположению плеча водителя или пассажира 16, датчика 24b поясничной опоры, расположенного смежно ожидаемому местоположению поясничной области водителя или пассажира 16, датчика 24c бедра, расположенного смежно ожидаемому местоположению бедра водителя или пассажира 16, и датчика 24d ноги, расположенного смежно ожидаемому местоположению ноги водителя или пассажира 16, когда водитель или пассажир 16 сидит на сиденье 14.
[00028] Один или более датчиков 24 контакта могут включать в себя любой тип датчика с возможностью обнаружения контакта между водителем или пассажиром 16 и сиденьем 14, включая, например, датчик близости, инфракрасный датчик, датчик давления или другую технологию обнаружения контакта или присутствия. В зависимости от типа используемой технологии обнаружения контакта выходные данные каждого датчика 24 контакта могут представлять собой одно из высокого значения (например, «1») или низкого значения (например, «0») или один из статуса «вкл» или статуса «выкл» для указания, обнаружен ли контакт. В качестве примера, низкое выходное значение может указывать отсутствие контакта с сиденьем 14, а высокое выходное значение может указывать наличие контакта с сиденьем 14.
[00029] В вариантах осуществления датчики 24 контакта могут быть выполнены так, чтобы водитель или пассажир 16 находился в надлежащей или правильной позе, когда тело водителя или пассажира находится в контакте с каждым из датчиков 24 контакта. Например, датчики 24 контакта могут быть размещены в заданных местах на сиденье, которые указывают правильную позу водителя или пассажира 16 транспортного средства при наличии контакта водителя или пассажира с указанными местами. В других случаях датчики 24 контакта могут быть размещены в заданных местах на сиденье, которые указывают неправильную или ненадлежащую позу при отсутствии контакта водителя или пассажира с указанными местами. В любом случае контакт с датчиком 24а плечевой области может прерываться, если водитель или пассажир 16 наклоняется вперед, сидя на сиденье 14, из-за сутулости или сгорбливания плечей, наклона вперед спины или корпуса или какого-либо иного наклона тела по направлению к рулевому колесу 28 транспортного средства 12. Подобным образом контакт с датчиком 24b поясничного отдела может прерываться, если, например, водитель или пассажир 16 выгибает спину вперед или иным образом наклоняет тело по направлению к рулевому колесу 28. Контакт с датчиком 24c бедра может прерываться, если водитель или пассажир 16 сидит слишком близко к передней части сиденья 14, например, на передней половине сиденья 14. Подобным образом контакт с датчиком 24d ноги может прерываться, если, например, колени водителя или пассажира 16 находятся слишком высоко над сиденьем 14.
[00030] В некоторых вариантах осуществления сиденье 14 транспортного средства и/или система 10 контроля сиденья дополнительно включает в себя детектор присутствия (такой как, например, блок 108 обнаружения присутствия на сиденье, показанный на Фиг. 5) для определения, сидит ли водитель или пассажир 16 на сиденье 14 перед активацией датчика(ов) 24 контакта. В предпочтительном варианте выполнения детектор присутствия может быть встроен в подушку 14b сиденья. Выходные данные детектора присутствия могут быть переданы в ECU 26 и в зависимости от того, является ли выходное значение высоким (например, присутствие обнаружено) или низким (например, присутствие не обнаружено), ECU 26 может активировать или деактивировать датчик(и) 24 контакта соответственно. Детектор присутствия может включать в себя любое подходящее устройство обнаружения присутствия, такое как, например, датчик давления, датчик веса, датчик близости или инфракрасный датчик.
[00031] В некоторых вариантах осуществления транспортное средство 12 и/или система 10 контроля сиденья включает в себя бортовую камеру (такую как, например, камера 109, показанная на Фиг. 5) для сканирования водителя или пассажира 16 и/или сиденья 14 и получения информации о позе водителя или пассажира и положении сиденья. Камера может быть обращена к передней и/или боковой части сиденья 14 так, чтобы поза водителя или пассажира 16 и положение сиденья 14 были полностью видны. Изображения, полученные камерой, могут передаваться в модуль 20 контроля сиденья для обработки изображений и получения информации о положении сиденья и позе с использованием известных технологий. Например, полученные изображения могут сравниваться с предварительно сохраненными изображениями, показывающими надлежащее и/или ненадлежащее положение сиденья и неправильную и/или правильную позу, для определения, существует ли тревожное состояние. Камера может включать в себя любой подходящий тип камеры, включая, например, Kinect камеру, автомобильный регистратор, камеру заднего вида, инфракрасную камеру, монохромную CCD камеру или цветную CCD камеру.
[00032] Хотя Фиг. 1 показывает водителя 16 транспортного средства, сидящего на водительском сиденье транспортного средства 12, следует понимать, что система 10 контроля сиденья транспортного средства может использоваться для проверки позы и положения сиденья для других сидений (не показаны) транспортного средства 12, включая переднее пассажирское сиденье или одно или более задних сидений. Дополнительно хотя датчики 22 и 24 показаны только на одной стороне сиденья 14 на Фиг. 1, следует понимать, что в некоторых вариантах осуществления дополнительные датчики 24 могут быть расположены на противоположной стороне сиденья 14 в зеркально отображенных местах на сиденье для обеспечения надлежащего контакта водителя или пассажира с сиденьем 14. Альтернативно датчики 24 могут быть расположены по центру сиденья 14 так, чтобы точно обнаруживать контакт с использованием только одного датчика 24 в каждом месте на сиденье.
[00033] В вариантах осуществления ECU 26 и/или модуль 20 контроля сиденья могут быть выполнены с возможностью определения, существует ли тревожное состояние на основании выходных данных, принимаемых от одного или более датчиков 22, 24 сиденья. Например, в некоторых случаях тревожное состояние может быть обнаружено, если сиденье 14 находится в ненадлежащем положении (например, угол 27 сиденья меньше или больше заданного порогового диапазона 100-115 градусов), или если водитель или пассажир 16 сидит в неправильной позе (например, водитель или пассажир 16 не контактирует с каждым из датчиков 24 контакта). Если обнаружено тревожное состояние, ECU 26 и/или модуль 20 контроля сиденья может быть выполнен с возможностью генерации сигнала управления для корректировки обнаруженного положения сиденья и/или позы водителя или пассажира так, чтобы устранить или отключить тревожное состояние.
[00034] В некоторых вариантах осуществления сигнал управления вызывает автоматическую регулировку сиденьем 14 транспортного средства обнаруженного положения сиденья до тех пор, пока тревожное состояние не будет устранено, или положение сиденья и/или поза водителя или пассажира не скорректируется. В таких вариантах осуществления сигнал управления может включать в себя предлагаемую регулировку угла для по меньшей мере одной из спинки 14a сиденья и подушки 14b сиденья, и при приеме сигнала управления соответствующий компонент сиденья 14 транспортного средства может автоматически перемещаться или регулировать свой наклон до тех пор, пока угол 27 сиденья не отрегулируется на предлагаемую величину, или, другими словами, не будет находиться в пределах заданного порогового диапазона. Например, спинка 14a сиденья может быть наклонена вперед или назад для удовлетворения предлагаемой регулировки угла, и/или подушка 14b сиденья может быть наклонена вверх или вниз для удовлетворения предлагаемой регулировки угла. Сигнал управления для автоматической регулировки угла может быть передан в блок управления сиденьем транспортного средства 12 (такой как, например, блок 106 управления сиденьем, показанный на Фиг. 5) для осуществления автоматического управления сиденьем 14 транспортного средства.
[00035] В других вариантах осуществления сигнал управления вызывает ограничение транспортным средством 12 действия или функции транспортного средства 12 до тех пор, пока тревожное состояние не будет устранено. Например, сигнал управления может предотвращать переключение передачи транспортного средства 12 водителем 16 транспортного средства, если обнаруженное положение сиденья и/или поза водителя или пассажира является ненадлежащей. Например, если транспортное средство 12 находится на парковке при срабатывании тревожного состояния, сигнал управления может предотвращать переключение водителем 16 переключателя передач на «передачу переднего хода», «передачу заднего хода» или любую другую активную передачу. В таком случае сигнал управления может быть передан в переключатель передач (такой как, например, переключатель 128 передач, показанный на Фиг. 5) для выбора передачи транспортного средства. При приеме сигнала управления переключатель передач может отключаться до тех пор, пока тревожное состояние не будет устранено. В таких вариантах осуществления может быть передан второй сигнал управления для повторной активации переключателя передач, как только положение сиденья и/или поза водителя или пассажира скорректируется.
[00036] В некоторых вариантах осуществления в дополнение или вместо автоматической регулировки сиденья 14 транспортного средства или автоматического ограничения транспортного средства 12 сигнал управления может включать в себя одно или более уведомлений для оповещения водителя и/или пассажира 16 транспортного средства о тревожном состоянии и предложения корректировки обнаруженного положения сиденья и/или позы водителя или пассажира для устранения или отключения тревожного состояния. ECU 26 и/или модуль 20 контроля сиденья могут быть выполнены с возможностью отправки уведомления на дисплей 18 транспортного средства для демонстрации уведомления водителю или пассажиру 16 транспортного средства. В вариантах осуществления дисплей 18 транспортного средства может представлять собой любой экран, встроенный в человеко-машинный интерфейс (такой как, например, человеко-машинный интерфейс (HMI) 110, показанный на Фиг. 5) транспортного средства 12 или другой блок транспортного средства с возможностью отображения информации (такой как, например, зеркало 29 заднего вида для обеспечения водителю обзора сзади транспортного средства 12, переднее ветровое стекло 25 транспортного средства 12 и т.д.). Например, как показано на Фиг. 1, дисплей 18 транспортного средства может быть встроен в приборную доску или приборную панель (такую как, например, приборная панель 112, показанная на Фиг. 5) транспортного средства 12. В других случаях дисплей 18 транспортного средства может быть встроен в отдельный мультимедийный экран (такой как, например, дисплей 114, показанный на Фиг. 5) для отображения информации и развлечений транспортного средства, такой как, например, информация навигационной системы, информация аудиосистемы и т.д. В еще других случаях дисплей 18 транспортного средства может находиться на экране мобильного устройства (не показано), сопряженного с транспортным средством 12, а точнее с вычислительной системой транспортного средства (такой как, например, вычислительная система 100 транспортного средства (VCS), показанная на Фиг. 5) для отображения информации и развлечений транспортного средства.
[00037] Одно или более уведомлений могут содержать графическую(ие) пиктограмму(ы), графическое(ие) изображение(я), текстовое(ые) сообщение(я), звук(и), световое(ые) предупреждение(я) или любое их сочетание. Например, в некоторых случаях уведомление может включать в себя текстовое описание, объясняющее тревожное состояние и/или рекомендуемую корректировку для устранения этого состояния. В других случаях уведомление может включать в себя изображение, показывающее причину тревожного состояния и/или то, как может быть скорректировано положение сиденья и/или поза.
[00038] В некоторых вариантах осуществления система 10 контроля сиденья транспортного средства генерирует разные уведомления для каждого типа тревожного состояния. Например, система 10 может генерировать уведомление о неправильной позе (такое как, например, уведомление 30 о неправильной позе, показанное на Фиг. 3) при определении, что водитель или пассажир 16 сидит в неправильной позе, и может генерировать уведомление о ненадлежащем положении сиденья (такое как, например, уведомление 40 о ненадлежащем положении сиденья, показанное на Фиг. 4A) при определении, что сиденье 14 находится в ненадлежащем положении. В случаях, когда тревожное состояние требует оба типа уведомлений (например, обнаружены неправильная поза и ненадлежащее положение сиденья), уведомления могут отображаться одновременно или последовательно.
[00039] В других вариантах осуществления система 10 может генерировать уведомление в двух частях: первая часть уведомления общая для каждого типа тревожного состояния (такая как, например, предупредительный символ 32, показанный на Фиг. 3) и вторая часть уведомления характерная для типа(ов) тревожного состояния (такая как, например, изображение 34 водителя или пассажира, показанное на Фиг. 3). В последнем случае такое же уведомление может использоваться для оповещения водителя или пассажира 16 транспортного средства более чем об одном тревожном состоянии (например, неправильной позе и ненадлежащем положении сиденья).
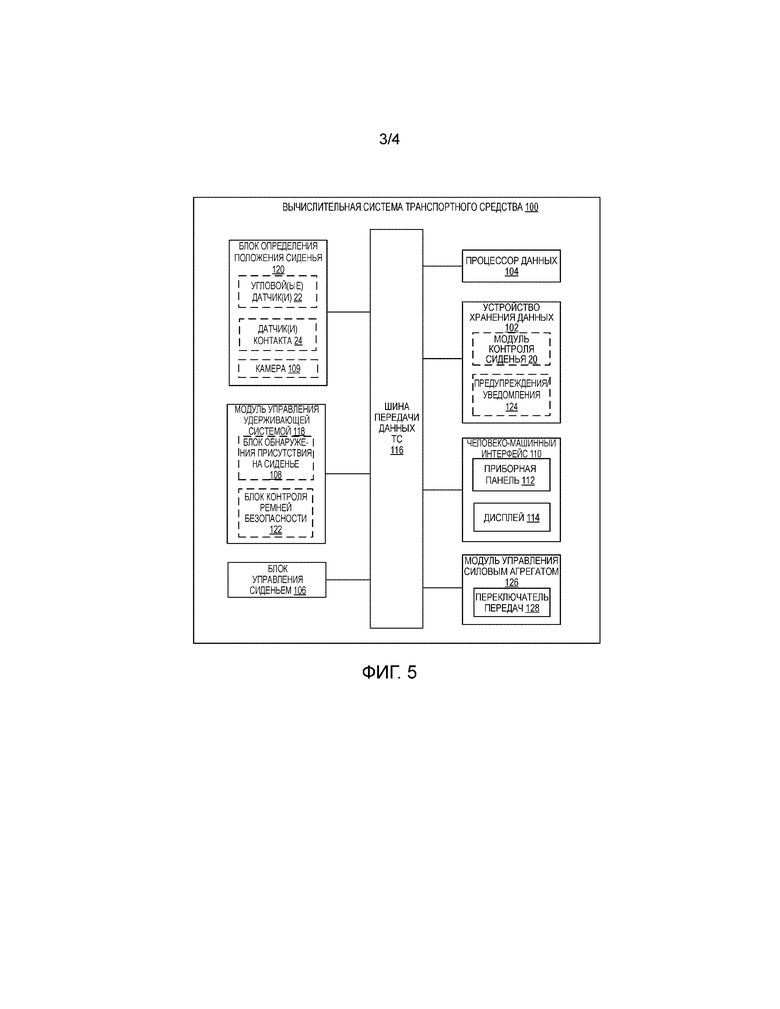
[00040] Далее обратимся к Фиг. 3, на которой показано примерное уведомление 30 о неправильной позе, генерируемое системой 10 контроля сиденья транспортного средства и отображаемое на дисплее 18 транспортного средства при обнаружении неправильной позы водителя или пассажира 16 транспортного средства в соответствии с вариантами осуществления. Как проиллюстрировано, уведомление 30 может включать в себя предупредительный символ 32, разработанный для привлечения внимания водителя или пассажира транспортного средства и информирования водителя или пассажира 16 о тревожном состоянии. В дополнение уведомление 30 может включать в себя изображение 34 водителя или пассажира, выполненное для информирования водителя или пассажира 16 о причине тревожного состояния. Следует понимать, что проиллюстрированное уведомление 30 является только примерным, и для выполнения такой же или подобной функции могут быть использованы другие символы и/или изображения.
[00041] В проиллюстрированном варианте выполнения изображение 34 водителя или пассажира изображает человека, сидящего на сиденье транспортного средства, и четыре точки 36 контакта между человеком и сиденьем. Эти точки 36 контакта могут соответствовать соответствующему одному из датчиков 24 контакта. Например, на Фиг. 3 точка 36a контакта соответствует датчику 24а плечевой области, точка 36b контакта соответствует датчику 24b поясничной области, точка 36c контакта соответствует датчику 24c бедра, а точка 36d контакта соответствует датчику 24d ноги. Уведомление 30 также может указывать, какие датчики 24 контакта, если таковые имеются, не имеют контакта с водителем или пассажира 16 путем выделения соответствующей точки 36 контакта на изображении 34 водителя или пассажира. Например, на Фиг. 3 точка 36a контакта выделена символом «X» в точке 36a контакта, тем самым указывая, что датчик 24а плечевой области не обнаруживает контакта с водителем или пассажиром. Могут быть использованы другие технологии выделения необнаруженных точек 36 контакта, включая отображение необнаруженных точек 36 контакта в разных формах или цветах (например, красный, если контакт не обнаружен, и зеленый, если контакт обнаружен), отображение только точки(ек) 36 контакта, в которой(ых) отсутствует контакт, или отображение только точки(ек) 36 контакта, в которой(ых) обнаружен контакт.
[00042] В проиллюстрированном варианте выполнения выделенная точка 36a контакта выполняет две функции: указывает причину тревожного состояния и дает рекомендацию корректировки для устранения тревожного состояния (например, рекомендуемую регулировку позы). В других вариантах осуществления уведомление 30 может включать в себя текстовое(ые) сообщение(я) в дополнение или вместо выделенной(ых) точки(ек) контакта для объяснения причины тревожного состояния (например, «не обнаружен контакт с сиденьем в плечевой области») и/или объяснения рекомендуемой корректировки (например, «откиньтесь на спинку сиденья» или «коснитесь плечами спинки сиденья»).
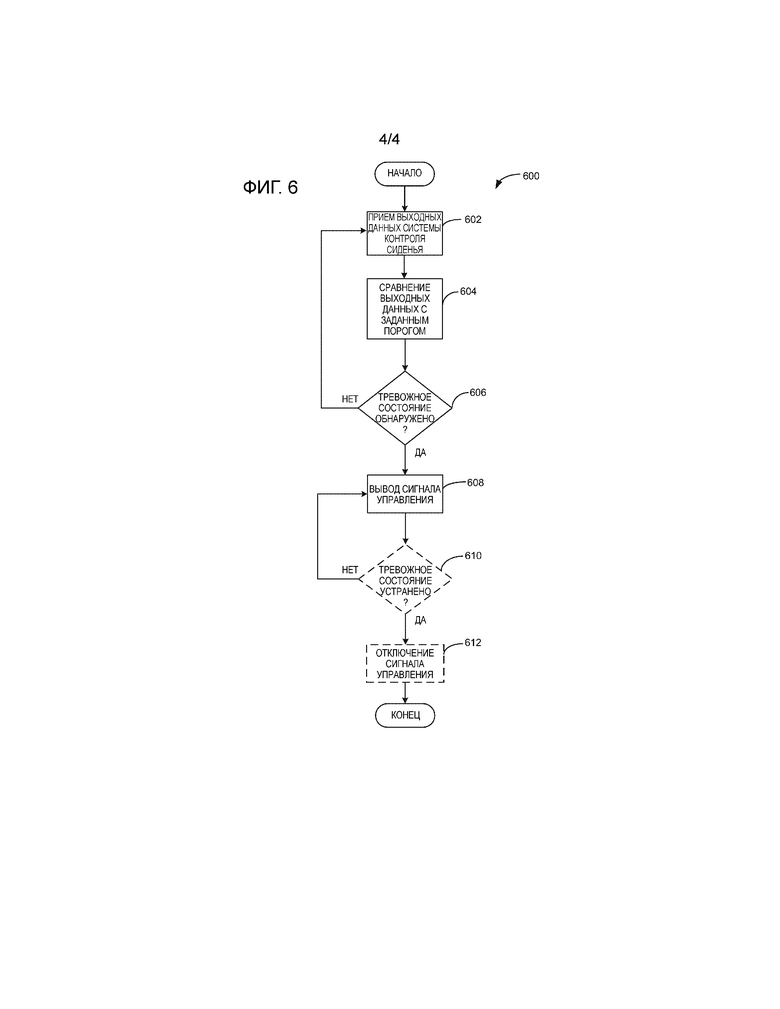
[00043] Далее обратимся к Фиг. 4A, 4B и 4C, на которых показаны примерные уведомления 40 о ненадлежащем положении сиденья, генерируемые системой 10 контроля сиденья транспортного средства и отображаемые на дисплее 18 транспортного средства при обнаружении ненадлежащего положения сиденья 14 в соответствии с вариантами осуществления. Уведомление 40 выполнено для информирования водителя или пассажира 16 о причине срабатывания тревожного состояния, а также о том, как может быть снято или устранено это состояние (например, рекомендуемая регулировка сиденья или регулировка угла сиденья). Как показано, уведомление 40 может включать в себя изображение 45 сиденья для графической иллюстрации текущего положения сиденья 14 транспортного средства, а именно текущей величины наклона сиденья 14. Также показано, что в некоторых случаях уведомление 40 может дополнительно включать в себя рекомендуемое изменение 46 угла для численного отражения разницы между текущим углом 27 сиденья и ближайшей границей заданного порогового диапазона (например, 100-110 градусов) для угла сиденья, а именно насколько и в каком направлении (например, увеличение или уменьшение) должен быть отрегулирован текущий угол 27 сиденья для устранения тревожного состояния. В дополнение уведомление 40 может включать в себя рекомендуемую регулировку 48 положения сиденья для корректировки текущего положения сиденья, а именно стрелку, указывающую направление, в котором может быть перемещена спинка 14a сиденья для получения надлежащего положения сиденья. В вариантах осуществления рекомендуемая регулировка 48 положения сиденья и рекомендуемое изменение 46 угла комбинируются для образования рекомендуемой регулировки угла сиденья для корректировки или устранения тревожного состояния.
[00044] Например, на Фиг. 4A уведомление 40a включает в себя изображение 45a сиденья, показывающее спинку 14a сиденья, откинутую слишком далеко назад, рекомендуемое изменение 46a угла, указывающее, что необходимо уменьшить угол 27 сиденья на 10 градусов для того, чтобы он находился в пределах заданного порогового диапазона, и рекомендуемую регулировку 48a положения сиденья, побуждающую водителя или пассажира 16 транспортного средства к изменению угла или наклона спинки 14a сиденья вперед. То есть уведомление 40a сообщает водителю или пассажиру 16, что ненадлежащее положение сиденья может быть скорректировано путем уменьшения угла наклона спинки 14a сиденья на 10 градусов.
[00045] Подобным образом на Фиг. 4B уведомление 40b включает в себя изображение 45b сиденья, показывающее угол 27 сиденья 14, который необходимо немного увеличить, рекомендуемое изменение 46b угла, которое указывает необходимость увеличения угла 27 сиденья на 10 градусов для того, чтобы он находился в пределах заданного порогового диапазона, и рекомендуемую регулировку 48b положения сиденья, которая побуждает водителя или пассажира 16 к изменению угла или наклона подушки 14b сиденья вниз. То есть уведомление 40b сообщает водителю или пассажиру 16, что ненадлежащее положение сиденья может быть скорректировано путем увеличения угла наклона подушки 14b сиденья на 10 градусов.
[00046] На Фиг. 4C уведомление 40c включает в себя изображение 45c сиденья, показывающее угол 27 сиденья 14, который является слишком большим, рекомендуемое изменение 46c угла, которое указывает необходимость уменьшения угла 27 сиденья на 5 градусов для того, чтобы он находился в пределах заданного порогового диапазона, и рекомендуемую регулировку 48c положения сиденья, которая побуждает водителя или пассажира 16 к изменению угла или наклона подушки 14b сиденья вверх. То есть уведомление 40c сообщает водителю или пассажиру 16, что ненадлежащее положение сиденья может быть скорректировано путем уменьшения угла наклона подушки 14b сиденья на 5 градусов.
[00047] Также предусмотрены другие типы уведомлений 40 для указания ненадлежащего положения сиденья в соответствии с принципами, раскрытыми в настоящем документе. Например, хотя предупредительная пиктограмма 32 показана только на Фиг. 3, следует понимать, что уведомления, показанные на Фиг. 4A, 4B и 4C, могут быть представлены в формате, подобном формату уведомления 30, включающему предупредительную пиктограмму 32. Дополнительно в некоторых случаях уведомления 30 и 40 могут быть объединены в одно уведомление для указания большей информации о неправильной позе и ненадлежащем положении сиденья. Например, уведомление 30 может быть изменено путем замены участка сиденья изображения 34 водителя или пассажира на одно из изображений 45a, 45b или 45c сиденья, показанных на Фиг. 4A, 4B или 4C, и добавления рекомендуемого значения 46 изменения и рекомендуемой регулировки 48 положения сиденья.
[00048] Далее обратимся к Фиг. 5, на которой показана примерная вычислительная система 100 транспортного средства (VCS), которая может быть встроена в транспортное средство 12, например, как часть системы электроники транспортного средства или информационно-развлекательной системы транспортного средства 12, в соответствии с вариантами осуществления. VCS 100 может представлять собой информационно-развлекательную систему, такую как система SYNC®, производимая компанией FORD MOTOR COMPANY®. Другие варианты осуществления VCS 100 могут включать в себя другие компоненты, меньшее количество компонентов или дополнительные компоненты по сравнению с компонентами, описанными ниже и показанными на Фиг. 5.
[00049] Как проиллюстрировано, VCS 100 может включать в себя устройство 102 хранения данных, процессор 104 данных (например, электронный процессор данных) и шину 116 передачи данных транспортного средства. VCS 100 может дополнительно включать в себя различные электронные блоки управления (ECU), которые отвечают за контроль и управление электрическими системами или подсистемами транспортного средства 12. Каждый ECU может включать в себя, например, один или более входов и выходов для сбора, приема и/или передачи данных, память для хранения данных и процессор для обработки данных и/или генерации новой информации на их основе. В проиллюстрированном варианте выполнения ECU VCS 100 включают в себя блок 106 управления сиденьем, человеко-машинный интерфейс (HMI) 110, модуль 118 управления удерживающей системой (RCM), блок 120 определения положения сиденья и модуль 126 управления силовым агрегатом (PCM).
[00050] Хотя не показано, VCS 100 может включать в себя другие ECU, такие как, например, блок управления телематическими службами (TCU) для обеспечения подключения транспортного средства 12 к одной или более беспроводным сетям и модуль управления кузовным оборудованием (BCM) для управления и контроля различных электронных приспособлений в кузове транспортного средства 12. В некоторых вариантах осуществления вычислительная система 100 транспортного средства дополнительно включает в себя таймер (не показан) для контроля времени, в течение которого каждое уведомление отображается на дисплее 18 транспортного средства и для оповещения модуля 20 контроля сиденья, если заданное количество времени после отображения уведомления истекло, как описано более подробно ниже.
[00051] ECU VCS 100 соединены шиной 116 передачи данных транспортного средства (такой как, например, шина локальной сети контроллеров (CAN)), которая передает данные в и от различных ECU, а также другого транспортного средства и/или вспомогательных компонентов (например, датчиков 22 и 24 сиденья, ECU 26 и т.д.) в сообщении с VCS 100. Дополнительно процессор 104 данных может сообщаться с одним из ECU и устройством 102 хранения данных по шине 116 передачи данных для выполнения одной или более функций, включая функции, связанные с модулем 20 контроля сиденья.
[00052] Блок 106 управления сиденьем может представлять собой ECU для управления сиденьями транспортного средства 12 с электрическим приводом, такими как, например, сиденье 14. Блок 106 управления сиденьем может включать в себя один или более элементов управления (не показаны) для регулировки различных аспектов сиденья, включая высоту сиденья, угол наклона спинки сиденья, угол наклона подушки сиденья, поясничную опору, высоту подголовника и т.д. В некоторых случаях блок 106 управления сиденьем встроен в модуль управления кузовным оборудованием (BCM). В вариантах осуществления блок 106 управления сиденьем может принимать сигнал управления от процессора 104 данных и/или модуля 20 контроля сиденья для автоматической корректировки угла сиденья 14 транспортного средства, а именно угла наклона спинки 14a сиденья и/или подушки 14b сиденья, если обнаружено, что угол сиденья находится вне заданного порога.
[00053] Блок 120 определения положения сиденья может представлять собой ECU для определения позы водителя или пассажира 16 и/или положения сиденья 14 транспортного средства 12. В некоторых вариантах осуществления блок 120 определения положения сиденья может включать в себя угловые датчики 22, датчики 24 контакта и/или камеру 109, как показано на Фиг. 5, и может быть расположен в кабине 12 транспортного средства и/или в сиденье 14 для обнаружения положения сиденья и/или позы водителя или пассажира. В других вариантах осуществления блок 120 определения положения сиденья соединен с возможностью связи с угловыми датчиками 22, датчиками 24 контакта и/или камерой 109, но расположен в VCS 100. В некоторых вариантах осуществления блок 120 определения положения сиденья может содержать ECU 26. В таком случае блок 120 определения положения сиденье также может включать в себя модуль 20 контроля сиденья. В других случаях модуль 20 контроля сиденья сохранен в устройстве 102 хранения данных VCS 100, как показано на Фиг. 5, и выполняется процессором 104 данных.
[00054] Человеко-машинный интерфейс (HMI) 110 (также называемый «пользовательский интерфейс») может представлять собой ECU для обеспечения взаимодействия пользователя с транспортным средством 12 и для предоставления транспортным средством информации оператору или водителю транспортного средства. HMI 110 содержит приборную панель (IP) 112 транспортного средства 12, мультимедийный экран 114, а также одно или более устройств ввода (не показаны) и/или устройств вывода (не показаны) для ввода, введения, приема, получения, отображения или вывода данных, связанных с вычислительной системой 100 транспортного средства, модулем 20 контроля сиденья или раскрытыми в настоящем документе технологиями. HMI 110 может быть выполнен с возможностью взаимодействия с другими ECU VCS 100 и/или процессором 104 данных по шине 116 передачи данных для предоставления информации или входных данных, принимаемых через HMI 110, соответствующему компоненту VCS 100 и предоставления информации или выходных данных, принимаемых от различных компонентов VCS 100, водителю или пассажиру 16 транспортного средства.
[00055] В вариантах осуществления приборная панель 112 (также называемая «приборная доска» или «панель приборов») включает в себя панель управления, расположенную перед водительским сиденьем, для размещения приборов и элементов управления для обеспечения работы транспортного средства 12, включая рулевое колесо 28 и различные измерительные приборы (например, спидометр, одометр, указатель уровня топлива и т.д.) и различные индикаторы транспортного средства, такие как, например, выбранное положение переключателя передач, предупреждения или уведомления о ремнях безопасности, низкий уровень топлива, низкое давление в шинах и т.д. В некоторых случаях приборная панель 112 включает в себя экран для электронного или цифрового отображения различных измерительных приборов или связанных с ними значений и различных индикаторов транспортного средства.
[00056] HMI 110 также включает в себя мультимедийный экран 114, отделенный от приборной панели 112 для отображения другой информации транспортного средства, такой как, например, информация навигационной системы, информация аудиосистемы видео, получаемое внешней камерой транспортного средства (не показана), изображение(я), получаемое(ые) бортовой камерой 109, информация системы обогрева и кондиционирования воздуха и т.д. В вариантах осуществления VCS 100 может передавать уведомления, генерируемые модулем 20 контроля сиденья, водителю или пассажиру 16 транспортного средства посредством дисплея 114 или посредством приборной панели 112, например, путем отображения пиктограмм 30 и/или 40 уведомления в качестве одного из индикаторов транспортного средства.
[00057] Модуль 118 управления удерживающей системой (RCM) может представлять собой ECU для управления и контроля удерживающей системы (не показана) транспортного средства 12. Например, RCM 118 может включать в себя блок 122 контроля ремней безопасности для определения, пристегнут ли ремень безопасности (не показан), связанный с сиденьем 14 или другим сиденьем транспортного средства. В некоторых вариантах осуществления RCM 118 дополнительно включает в себя блок 108 обнаружения присутствия на сиденье для обнаружения присутствия водителя или пассажира на каждом сиденье транспортного средства. В таких примерах блок 122 контроля ремней безопасности может быть активирован, как только обнаружено присутствие водителя или пассажира на сиденье транспортного средства. В некоторых вариантах осуществления выходные данные блока 108 обнаружения присутствия на сиденье или блока 122 контроля ремней безопасности могут использоваться для активации системы 10 контроля сиденья. Например, когда на сиденье 14 обнаружен водитель или пассажир, и/или ремень безопасности сиденья 14 пристегнут, VCS 100 может передавать эту информацию системе 10 контроля сиденья. При приеме этой информации модуль 20 контроля сиденья может побуждать датчики 24 контакта к началу определения позы водителя или пассажира и/или угловые датчики 22 к началу определения угла 27 сиденья.
[00058] Процессор 104 данных может содержать один или более из микропроцессора, микроконтроллера, программируемой логической матрицы, интегральной схемы специального назначения, логического устройства или другого электронного устройства для обработки, ввода, вывода, управления, хранения или извлечения данных. В вариантах осуществления VCS 100 может содержать компьютер общего назначения, который запрограммирован различными программными инструкциями или модулями, сохраненными в устройстве 102 хранения данных (например, электронной памяти) или в другом месте.
[00059] Устройство 102 хранения данных может содержать одну или более из электронной памяти, энергонезависимой памяти с произвольным доступом (например, RAM), памяти на триггерах, записываемого компьютером или машиночитаемого носителя данных, магнитного или оптического устройства хранения данных, накопителя на магнитных или оптических дисках, накопителя на жестких дисках или другого электронного устройства для хранения, извлечения, чтения или записи данных. Устройство 102 хранения данных хранит один или более программных модулей или программных инструкций, включая модуль 20 контроля сиденья транспортного средства, для выполнения процессором 104 данных. В некоторых случаях устройство 102 хранения данных также хранит графические пиктограммы, графические изображения, текстовые сообщения или другие предупредительные элементы 124, используемые для генерации уведомлений для оповещения водителя или пассажира 16 транспортного средства о тревожном состоянии, включая уведомления 30 и/или 40, показанные на Фиг. 3 и 4A-4C.
[00060] Модуль 126 управления силовым агрегатом (PCM) может представлять собой ECU для управления и контроля двигателя и коробки передач транспортного средства 12. В некоторых вариантах осуществления PCM 126 может быть разделен на два отдельных ECU, а именно блок управления двигателем и блок управления коробкой передач. В любом случае PCM 126 может быть выполнен с возможностью управления запуском и остановкой двигателя транспортного средства 12. Как показано на Фиг. 5, PCM 126 может включать в себя или быть соединен с переключателем 128 передач (также известным как «рычаг переключения передач») для переключения передачи транспортного средства 12 между, например, парковочной передачей («P»), передачей заднего хода («R»), нейтральной передачей («N»), передачей переднего хода («D») и пониженной передачей («L»). PCM 126 может быть выполнен с возможностью отключения переключателя 128 передач при приеме сигнала управления от модуля 20 контроля сиденья и/или процессора 104 данных, как только обнаружено тревожное состояние, так, чтобы предотвращать переключение водителем 16 парковочной передачи транспортного средства 12 до тех пор, пока не будет устранено тревожное состояние. PCM 126 может повторно активировать переключатель 128 передач, как только тревожное состояние будет устранено.
[00061] Фиг. 6 иллюстрирует примерный способ 600 контроля и корректировки положения сиденья транспортного средства (такого как, например, сиденье 14 транспортного средства 12, которое показано на Фиг. 1 и 2) с размещенным на нем водителем или пассажиром (таким как, например, водитель или пассажир 16, показанный на Фиг. 1) в соответствии с вариантами осуществления. Способ 600 может выполняться одним или более процессорами (или контроллерами), встроенными, например, в систему контроля сиденья транспортного средства (такую как, например, система 10 контроля сиденья транспортного средства, показанная на Фиг. 1), и/или вычислительную систему транспортного средства (такую как, например, вычислительная система 100 транспортного средства, показанная на Фиг. 5). В одном варианте выполнения способ 600 осуществляется по меньшей мере частично процессором 104 данных VCS 100, выполняющим программное обеспечение, сохраненное в устройстве 102 хранения данных, такое как, например, модуль 20 контроля сиденья, и взаимодействующим с одним или более компонентами VCS 100 и/или системы 10 контроля сиденья транспортного средства, соединенной с ней.
[00062] Способ 600 может начинаться на этапе 602, на котором процессор и/или модуль контроля сиденья принимает выходные данные от одного или более датчиков, встроенных или подсоединенных к сиденью транспортного средства (таких как, например, датчики 22 и/или 24, встроенные в сиденье 14 транспортного средства, которые показаны на Фиг. 1). В некоторых случаях выходные данные могут быть приняты через электронный блок управления (такой как, например, ECU 26, показанный на Фиг. 1) или другой электронный процессор данных системы 10 контроля сиденья транспортного средства, который соединен с одним или более датчиками.
[00063] В вариантах осуществления выходные данные включает в себя угол сиденья (такой как, например, угол 27 сиденья, показанный на Фиг. 2), определенный, например, датчиком углового положения (таким как, например, угловой(ые) датчик(и) 22, показанный(ые) на Фиг. 1 и 2), соединенным с сиденьем и встроенным в один или более датчиков. В некоторых случаях угол сиденья представляет собой угловое отношение между спинкой сиденья (такой как, например, спинка 14a сиденья, показанная на Фиг. 1 и 2) и подушкой сиденья (такой как, например, подушка 14b сиденья, показанная на Фиг. 1 и 2) сиденья транспортного средства и вычисляется процессором. Например, процессор может вычислять угол сиденья на основании первого угла, определенного датчиком углового положения, расположенным в спинке сиденья (таким как, например, угловой датчик 22а, показанный на Фиг. 1 и 2), и второго угла, определенного датчиком углового положения, расположенным в подушке сиденья (таким как, например, угловой датчик 22b, показанный на Фиг. 1 и 2). В других случаях угол сиденья представляет собой угол наклона спинки сиденья, если угол наклона подушки сиденья зафиксирован.
[00064] В некоторых вариантах осуществления выходные данные также могут включать в себя статус контакта водителя или пассажира, обнаруженный, например, датчиком контакта (таким как, например, датчик(и) 24, показанный(ые) на Фиг. 1), расположенным в определенном месте на сиденье и встроенным в один или более датчиков. Датчик контакта может быть выполнен с возможностью обнаружения контакта между местом на сиденье и водителем или пассажиром, сидящим на нем. Статус контакта водителя или пассажира может быть положительным, если датчиком контакта обнаружен контакт водителя или пассажира в месте на сиденье, и может быть отрицательным, если контакт водителя или пассажира в месте на сиденье не обнаружен. В вариантах осуществления один или более датчиков включает в себя множество датчиков контакта (таких как, например, датчик 24а плечевой области, датчик 24b спины, датчик 24c бедра и датчик 24d ног, показанные на Фиг. 1), расположенных в различных местах на сиденье, и контакт водителя или пассажира со всеми датчиками контакта указывает правильную позу, тогда как отсутствие контакта водителя или пассажира с по меньшей мере одним из датчиков контакта указывает неправильную позу.
[00065] Способ 600 дополнительно включает в себя этап 604, на котором процессор и/или модуль контроля сиденья сравнивает выходные данные, принятые на этапе 602, с заданным порогом. Заданный порог может варьироваться в зависимости от типа выходных данных. Например, когда выходные данные получены от датчика углового положения, заданный порог представляет собой диапазон значений, представляющий диапазон рекомендуемых с точки зрения эргономичности углов сиденья для сиденья транспортного средства, такой как, например, приблизительно 100-110 градусов. Когда выходные данные получены от датчика контакта, заданный порог представляет собой положительный статус контакта водителя или пассажира или выходное значение, указывающее, что контакт между сиденьем транспортного средства и водителем или пассажиром обнаружен (например, «высокое» или «1»).
[00066] На этапе 606 процессор и/или модуль контроля сиденья определяет, существует ли тревожное состояние на основании сравнения выходных данных на этапе 604. Тревожное состояние определяется, если выходные данные (или определенный угол сиденья) угловых датчиков находятся вне (например, больше или меньше) заданного порога или диапазона значений. Также тревожное состояние может быть обнаружено, если выходные данные датчиков контакта представляют собой отрицательный статус контакта водителя или пассажира, указывающий, что один или более датчиков контакта не обнаружили контакта между сиденьем транспортного средства и водителем или пассажиром. Если тревожное состояние не обнаружено (например, ответ «нет» на этапе 606), способ 600 переходит обратно на этап 602 для ожидания новых выходных данных от одного или более датчиков сиденья.
[00067] С другой стороны, если тревожное состояние обнаружено (например, ответ «да» на этапе 606), способ 600 переходит на этап 608, на котором процессор и/или модуль контроля сиденья выводит сигнал управления для корректировки положения сиденья и/или позы водителя или пассажира, которые вызвали тревожное состояние. В некоторых вариантах осуществления сигнал управления передается в блок управления сиденьем (такой как, например, блок 106 управления сиденьем, показанный на Фиг. 5) вычислительной системы транспортного средства для запуска автоматической регулировки угла сиденья транспортного средства, а именно углового отношения между спинкой сиденья и подушкой сиденья. Например, сигнал управления может включать в себя предлагаемую регулировку угла (например, количество градусов), и при приеме сигнала управления блок управления сиденьем может автоматически регулировать по меньшей мере один из угла наклона спинки сиденья и угла наклона подушки сиденья для достижения предлагаемой регулировки угла. В других вариантах осуществления сигнал управления передается в переключатель передач транспортного средства (такой как, например, переключатель 128 передач, показанный на Фиг. 5) для ограничения переключения передач до тех пор, пока тревожное состояние не будет устранено. В таком случае сигнал управления может быть передан, когда переключатель передач находится на парковочной передаче, и может отключать переключатель передач (например, предотвращать переключение на «передачу переднего хода» или «передачу заднего хода») до тех пор, пока тревожное состояние не будет устранено.
[00068] В некоторых вариантах осуществления сигнал управления вызывает отображение на дисплее транспортного средства (таком как, например, дисплей 18 транспортного средства, показанный на Фиг. 1) предупреждения или уведомления (такого как, например, уведомления 30 и/или 40, показанные на Фиг. 3 и 4A-4C). Уведомление содержит рекомендуемую регулировку сиденья для регулировки положения сиденья или угла сиденья и может включать в себя графическое изображение рекомендуемой регулировки сиденья, например, которое показано на Фиг. 4A-4C. В некоторых случаях уведомление также включает в себя рекомендуемую регулировку позы для регулировки позы водителя или пассажира и может включать в себя графическое изображение места на сиденье, в котором не обнаружен контакт водителя или пассажира. В вариантах осуществления уведомление, а именно пиктограммы, изображения и/или текст, включенные в него, могут храниться в устройстве хранения данных (таком как, например, устройство 102 хранения данных, показанное на Фиг. 5). В таком случае процессор и/или модуль контроля сиденья может извлекать уведомление или его компоненты (такие как, например, предупреждения/уведомления 124, показанные на Фиг. 5) из устройства хранения данных и передавать их на дисплей транспортного средства для демонстрации водителю транспортного средства.
[00069] В некоторых вариантах осуществления способ 600 дополнительно включает в себя этап 610, на котором процессор и/или модуль контроля сиденья определяют, устранено ли тревожное состояние путем достаточной корректировки положения сиденья и/или позы водителя или пассажира, при необходимости. Например, процессор и/или модуль контроля сиденья может принимать новые выходные данные от датчиков сиденья, если водитель или пассажир транспортного средства корректирует его позу путем контакта со всеми датчиками контакта, и/или положение сиденья транспортного средства корректируется путем регулировки угла или наклона сиденья транспортного средства так, чтобы он находился в пределах заданного порогового диапазона.
[00070] Если тревожное состояние устранено (например, ответ «да» на этапе 610), способ 600 может продолжаться на этапе 612, на котором уведомление отключается или больше не отображается на дисплее транспортного средства. С другой стороны, если корректировка не принята (например, ответ «нет» на этапе 610), способ 600 может возвращаться на этап 608 для вывода сигнала управления снова. В некоторых вариантах осуществления этот цикл может продолжаться до тех пор, пока не будет выполнена корректировка, или не будет устранено тревожное состояние. В некоторых вариантах осуществления водитель или пассажир транспортного средства может выборочно отключать предупреждение. В других вариантах осуществления способ 600 не включают в себя этап 610, и уведомление отображается в течение заданного периода времени (X) (например, 20 секунд) до автоматического отключения на этапе 612. Способ 600 может завершаться после этапа 612, если таковой имеется, или, в противном случае, после этапа 608.
[00071] В некоторых вариантах осуществления описания процесса или блоки на фигурах, например, Фиг. 6, могут представлять модули, сегменты или участки кода, которые включают в себя одну или более выполняемых инструкций для осуществления конкретных логических функций или этапов процесса. Любые альтернативные осуществления включены в пределы объема охраны описанных в настоящем документе вариантов осуществления, причем функции могут выполняться в порядке, отличном от показанного или рассмотренного, включая по существу одновременный или обратный порядок, в зависимости от заложенных функциональных возможностей, которые будут понятны специалисту в области техники.
[00072] Следует подчеркнуть, что вышеописанные варианты осуществления, в частности, любые «предпочтительные» варианты осуществления, представляют собой возможные примеры вариантов осуществления, изложенные только для четкого понимания принципов изобретения. Множество изменений и модификаций может быть выполнено в вышеописанном(ых) варианте(ах) осуществления по существу без отклонения от замысла и принципов описанных здесь технологий. Все такие модификации должны быть включены в пределы объема охраны настоящего изобретения и защищены следующей далее формулой изобретения.
Настоящее изобретение, в общем, относится к сиденьям транспортных средств, в частности к контролю положения сиденья транспортного средства и позы водителя или пассажира на сиденье транспортного средства. Транспортное средство содержит сиденье, первый датчик, процессор и переключатель передач. Первый датчик соединен с сиденьем для определения угла сиденья. Процессор принимает данные, определяемые блоком датчиков, соединенным сиденьем, и выполнен с возможностью вывода сигнала управления для корректировки угла сиденья, если угол сиденья находится вне заданного диапазона значений. Сигнал управления отключает переключатель передач. Повышается комфорт при использовании транспортного средства. 2 н. и 18 з.п. ф-лы, 8 ил.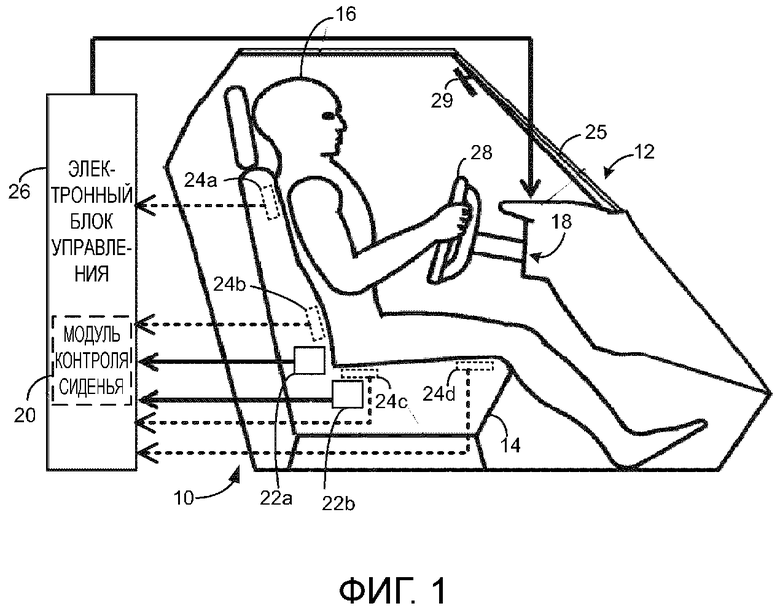
1. Транспортное средство, содержащее:
сиденье;
первый датчик, соединенный с сиденьем для определения угла сиденья;
процессор, соединенный с возможностью связи с первым датчиком и сиденьем и выполненный с возможностью вывода сигнала управления для корректировки угла сиденья, если угол сиденья находится вне заданного диапазона значений; и
переключатель передач, соединенный с возможностью связи с процессором, причем сигнал управления отключает переключатель передач.
2. Транспортное средство по п. 1, в котором заданный диапазон значений составляет приблизительно 100-110 градусов.
3. Транспортное средство по п. 1, в котором сиденье включает в себя спинку сиденья и подушку сиденья и угол сиденья представляет собой угловое отношение между спинкой сиденья и подушкой сиденья.
4. Транспортное средство по п. 3, в котором первый датчик соединен со спинкой сиденья и выполнен с возможностью определения угла наклона спинки сиденья.
5. Транспортное средство по п. 4, содержащее также второй датчик, причем второй датчик соединен с подушкой сиденья и выполнен с возможностью определения угла наклона подушки сиденья, причем процессор также выполнен с возможностью вычисления угла сиденья на основании угла, определенного первым датчиком, и угла, определенного вторым датчиком.
6. Транспортное средство по п. 1, дополнительно содержащее дисплей, соединенный с возможностью связи с процессором, причем сигнал управления вызывает отображение на дисплее уведомления, содержащего рекомендуемую регулировку угла сиденья для регулировки угла сиденья так, чтобы он находился в пределах заданного диапазона значений.
7. Транспортное средство по п. 6, в котором уведомление графически изображает рекомендуемую регулировку угла сиденья.
8. Транспортное средство по п. 6, содержащее также датчик контакта, соединенный с сиденьем для обнаружения контакта пассажира с сиденьем, причем сигнал управления вызывает отображение на дисплее второго уведомления, если контакт пассажира в месте на сиденье не обнаружен.
9. Транспортное средство по п. 8, в котором уведомление графически изображает место на сиденье, в котором не обнаружен контакт пассажира.
10. Транспортное средство по п. 1, в котором сигнал управления побуждает автоматическую регулировку угла сиденья так, чтобы он находился в пределах заданного диапазона значений.
11. Транспортное средство по п. 1, в котором процессор отключает переключатель передач, как только угол сиденья оказывается в пределах заданного диапазона значений.
12. Способ корректировки положения сиденья транспортного средства с сидящим на нем водителем или пассажиром, содержащий этапы, на которых:
принимают процессором выходные данные, определенные блоком датчиков, соединенным с сиденьем;
сравнивают, используя процессор, выходные данные с заданным порогом для определения, существует ли тревожное состояние; и,
если имеется, выводят сигнал управления для корректировки положения сиденья,
причем блок датчиков включает в себя датчик углового положения;
и выводят сигнал управления, содержащий отключение переключателя передач транспортного средства.
13. Способ по п. 12, в котором выходные данные включают в себя угол сиденья, определенный датчиком углового положения, диапазон значений включает в себя заданный порог и тревожное состояние существует, если угол сиденья находится вне диапазона значений.
14. Способ по п. 13, в котором вывод сигнала управления содержит этап, на котором на дисплее транспортного средства отображают уведомление, содержащее рекомендуемую регулировку угла сиденья.
15. Способ по п. 14, в котором уведомление включает в себя
графическое изображение рекомендуемой регулировки угла сиденья.
16. Способ по п. 12, в котором блок датчиков дополнительно включает в себя датчик контакта, расположенный в месте на сиденье.
17. Способ по п. 16, в котором выходные данные включают в себя статус контакта водителя или пассажира, определенный датчиком контакта, причем заданный порог представляет собой положительный статус контакта пассажира, и тревожное состояние существует при приеме отрицательного статуса контакта пассажира для места на сиденье.
18. Способ по п. 17, в котором вывод сигнала управления содержит этап, на котором на дисплее транспортного средства отображают второе уведомление, содержащее рекомендуемую регулировку позы, включая графическое изображение места на сиденье.
19. Способ по п. 12, в котором вывод сигнала управления содержит этап, на котором автоматически регулируют положение сиденья для устранения тревожного состояния.
20. Способ по п. 12, содержащий также этап, на котором отключают, используя процессор, переключатель передач, когда имеет место тревожное состояние.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| СИДЕНЬЕ АВТОМОБИЛЯ С ФИКСИРУЮЩЕЙСЯ ОТКИДНОЙ ЧАСТЬЮ СПИНКИ И СИСТЕМА СИДЕНЬЯ С ТАКИМ СИДЕНЬЕМ | 2009 |
|
RU2500551C2 |
| СИДЕНЬЕ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЗАДАНИЯ ЖЕСТКОСТИ ДЛЯ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2529057C1 |

