Изобретение относится к авиационной технике, в частности к устройствам, предназначенным для закрепления, транспортирования и принудительного сброса грузов, например в виде ракетного вооружения, на летательных аппаратах, а конкретно - к авиационным катапультным устройствам (далее - АКУ).
Применение принудительного сброса грузов продиктовано необходимостью обеспечения безопасного отделения груза от летательного аппарата на разных режимах его полета.
Известны способы сброса грузов с летательного аппарата по патенту РФ №2402460 «Устройство для крепления и сброса груза с летательного аппарата», МПК B64D 1/02, 2009 г. и патенту США №7648104 «Store Ejector Rack», МПК B64D 1/04, 2006 г., согласно которым сброс груза осуществляется путем подачи рабочей среды в полости гидро-пневмоцилиндров переднего и заднего толкателей по заранее установленному закону изменения давления.
Достоинством указанных способов является простота схемы управления, которая заключается только в задействовании пневмосети или последовательности задействования пневматической или газовой сетей.
Недостатком указанных способов является отсутствие их адаптивности к внешним (аэродинамические силы) и внутренним (различные массогабаритные и центровочные характеристики подвешиваемого груза) факторам из-за отсутствия в контурах управления обратной связи между воздействующими на груз факторами и системой управления гидро-пневмоцилиндрами толкателей.
Известен способ отделения груза, реализованный в устройстве по патенту РФ №2521446 «Балочный держатель», МПК B64D 1/04 2012 г., в котором задействованы контуры обратных связей по внешним возмущающим факторам.
В указанном способе измеряют линейные ускорения (перегрузки) на корпусе балочного держателя, в переднем и заднем толкателях. Далее рассчитываются требуемые значения кинематических параметров движения центра масс и по измеренным перегрузкам рассчитываются текущие значения кинематических параметров движения груза. По разности линейных скоростей требуемых (заданных) и текущих значений формируются управляющие сигналы на гидроприводы переднего и заднего толкателей с определенными весовыми коэффициентами.
Достоинством этого способа является наличие контуров обратной связи, обеспечивающих адаптивный способ сброса к воздействию изменяющихся внешних факторов. Этот способ позволяет автономно (без получения предварительных данных о действующих на груз аэродинамических нагрузках) обеспечить безопасное отделение груза на всех режимах полета летательного аппарата.
Недостатком указанного способа является отсутствие адаптивности к внутренним воздействующим факторам. Так угловая скорость движения груза относительно центра масс задается постоянной на всех режимах полета, а линейная скорость движения центра массы не имеет ограничения по максимально допустимой величине, что может привести к неустойчивости системы стабилизации груза.
Устройство, реализующее указанный выше способ принудительного сброса груза, по патенту РФ №2521446 содержит корпус с размещенным на нем пироприводом, представляющим собой двухполостной силовой цилиндр, в одной полости которого происходит повышение давления за счет происходящего процесса горения пиропатрона, а в другой полости происходит сжатие рабочей жидкости. Вторая полость силового цилиндра через гидрораспределитель связана с гидроцилиндрами переднего и заднего гидротолкателей. На гидротолкателях и корпусе размещены датчики линейных перегрузок, выходные данные которых обрабатываются вычислительным блоком.
Достоинством этого устройства является то, что в качестве исполнительных механизмов переднего и заднего толкателей использованы гидросистемы, содержащие гидроцилиндры с электрогидроклапанами. Использование гидросистемы с рабочей жидкостью позволяет повысить быстродействие сброса груза по сравнению с пневмосистемой.
Недостатком указанного устройства является то, что в гидросистеме использованы однополостные гидроцилиндры с электрогидроклапанами, регулирующими подачу рабочей жидкости в этой полости.
Известен способ и устройство принудительного сброса груза по патенту РФ №2692287 «Адаптивный способ и устройство принудительного сброса-катапультирования груза», МПК B64D 1/04, 2017 г., заключающийся в повышении качества принудительного сброса груза за счет создания адаптивности перемещений гидротолкателей, использования автономного вытеснительного источника гидропитания и гидротолкателей, Каждый гидротолкатель снабжен измерительным устройством в виде датчика ускорения и управляющим устройством в виде гидрораспределителя. Данное техническое решение обладает рядом существенных недостатков:
1. В качестве измерительных устройств используются датчики ускорения и определение линейной скорости каждого из толкателей производится на основании измерения ускорения. Такой способ измерения из-за быстроты происходящих процессов и возникающих в процессе перемещения ударных нагрузок вносит в процесс управления погрешность, связанную с возникновением больших «шумов» при обработке сигналов, поступающих с датчиков ускорения.
2. В качестве управляющих устройств используются гидрораспределители. Промышленно выпускаемые гидрораспределители не обеспечивают требуемые для обеспечения управления характеристики по быстродействию срабатывания (Т<0,003 с) и по расходу рабочей жидкости (до 15 л/с). Кроме того выпускаемые гидрораспределители имеют большую массу и габариты.
Данное техническое решение принимается за прототип.
Технической проблемой, на решение которой направлено предложенное техническое решение, является низкая точность задания требуемой угловой скорости при отделении груза от устройства принудительного сброса, уменьшение массогабаритных характеристик устройства и улучшение его эксплуатационных характеристик.
Технический результат от использования предлагаемого технического решения достигается за счет того, что штокам гидравлических толкателей задают линейные перемещения и в процессе этих перемещений осуществляют измерение текущих линейных скоростей перемещения штока каждого гидравлического толкателя, после чего проводят сравнение полученных величин текущих линейных скоростей перемещения штоков гидравлических толкателей с заранее определенными величинами требуемых линейных скоростей перемещения штоков тех же гидравлических толкателей, после чего по разнице между величинами требуемой и текущей линейных скоростей штоков гидравлических толкателей формируют команды на управление штоками гидравлических толкателей таким образом, чтобы в момент сброса груза величины текущих линейных скоростей перемещения штоков гидравлических толкателей совпадали с величинами требуемых линейных скоростей перемещения штоков тех же гидравлических толкателей, а устройство для осуществления способа содержит корпус, в котором установлены пирогидравлический источник энергии, два гидравлических толкателя со штоками, каждый из которых снабжен измерительным устройством и управляющим устройством, электрически связанными с блоком управления гидравлическими толкателями, и устройство открытия замково-стопорного механизма, причем устройство снабжено гидроаккумулятором и гидрозамком, при этом измерительные устройства выполнены в виде датчиков скорости, а управляющие устройства выполнены в виде блоков быстродействующих электрогидравлических клапанов, гидравлически связанных своими входными каналами с выходными каналами гидрозамка, а выходными каналами - с гидроаккумулятором, причем входной канал гидрозамка гидравлически связан с пирогидравлическим источником энергии.
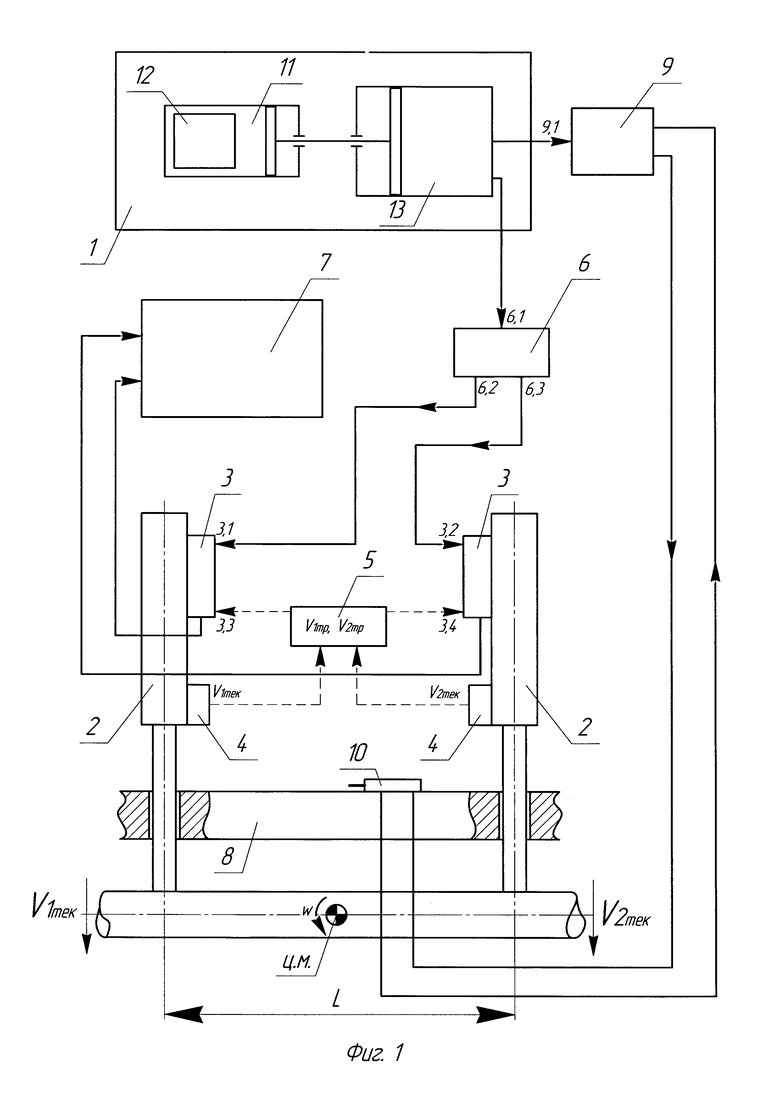
Предлагаемый способ принудительного сброса-катапультирования груза и устройство для его осуществления поясняется графическими материалами, где на фиг. 1 показана принципиальная схема, иллюстрирующая предложенный способ и конструктивное выполнение устройства, реализующего данный способ.
Заявленный способ принудительного сброса груза реализуется посредством устройства, содержащего пирогидравлический источник энергии 1, два гидравлических толкателя 2 со штоками, на каждом из которых расположены блок электрогидравлических клапанов 3 с входными 3.1, 3.2 и выходными 3.3, 3.4 каналами и датчик 4 замера линейной скорости перемещения соответствующего гидравлического толкателя 2, блок управления 5, гидрозамок 6 с входным 6.1 и выходными 6.2, 6.3 каналами, блок гидроаккумуляторов 7 и устройство открытия замково-стопорного механизма (на схеме не показан). Замково-стопорный механизм (на схеме не показан) закреплен в корпусе 8 АКУ и обеспечивает фиксацию сбрасываемого груза в АКУ в процессе полета. Устройство открытия замково-стопорного механизма состоит из гидрораспределителя 9 с входным каналом 9.1 и гидроцилиндра 10. Пиро-гидравлический источник энергии 1 в свою очередь состоит из пиротолкателя 11 со штоком в котором устанавливается пиропатрон 12 и гидравлического толкателя 13 со штоком. Гидравлический толкатель 13 через входной 6.1 и выходные 6.2, 6.3 каналы гидрозамка 6 гидравлически связан с входными 3.1, 3.2 каналами блоков электрогидравлических клапанов 3, при этом выходные 3.3, 3.4 каналы блоков электрогидравлических клапанов 3 гидравлически связаны с блоком гидроаккумуляторов 7. Гидравлический толкатель 13 через входной канал 9.1 гидрораспределителя 9 гидравлически связан с гидроцилиндром 10 замково-стопорного механизма АКУ.
Устройство принудительного сброса груза, реализующее заявленный способ, работает следующим образом.
Предварительно экспериментальным путем определяются величины требуемых линейных скоростей V1 тр и V2 тр, достигаемых штоками каждого гидравлического толкателя 2 в момент отделения груза в зависимости от внешних воздействующих факторов при различных режимах полета летательного аппарата, массогабаритных и центровочных характеристик катапультируемых грузов. Полученные экспериментально величины требуемых линейных скоростей V1 тр и V2 тр штоков двух гидравлических толкателей 2 будут являться оптимальными для безопасного отделения того или иного груза от АКУ. Величины требуемых линейных скоростей V1 тр и V2 тр штоков двух гидравлических толкателей 2 перед полетом вводятся в блок управления 5 гидравлическими толкателями 2. При этом блоком управления 5 рассчитывается величина требуемого углового ускорения груза ωтр как разность между требуемыми линейными скоростями V1 тр и V2 тр толкателей 2, деленная на расстояние L между толкателями 2.
Перед сбросом груза подается команда на срабатывание установленного в пиротолкателе 11 пиропатрона 12. Под действием нарастающего в процессе горения пиропатрона 12 давления шток пиротолкателя 11 воздействует на шток гидравлического толкателя 13. В рабочей полости гидравлического толкателя 13 за счет воздействия штока гидротолкателя происходит нарастание давления рабочей жидкости и при достижении рабочего давления, или через установленную временную задержку, подается команда на открытие гидрораспределителя 9. Гидрораспределитель 9 подает рабочую жидкость в гидроцилиндр 10, что приводит к открытию замково-стопорного механизма АКУ (на схеме не показан). Удерживаемый в АКУ груз разблокируется.
Одновременно с подачей команды на открытие гидрораспределителя 9 подается команда на открытие гидрозамка 6. Рабочая жидкость через входной 6.1 и выходные 6.2, 6.3 каналы гидрозамка 6 поступает к входным каналам 3.1 и 3.2 блоков электрогидравлических клапанов 3 и далее к соответствующим гидравлическим толкателям 2. Штоки гидравлических толкателей 2 начинают свое перемещение, преодолевая силы сопротивления, действующие со стороны закрепленного груза. Под воздействием сил сопротивления со стороны закрепленного груза штоки обоих гидравлических толкателей 2 будут перемещаться с различными текущими линейными скоростями V1 тек и V2 тек. Датчики скорости 4 осуществляют измерение текущих линейных скоростей V1 тек и V2 тек штоков соответствующих гидравлических толкателей 2 в процессе их перемещения. Данные о величинах текущих линейных скоростей V1 тек и V2 тек штоков каждого толкателя 2 от датчиков 4 поступают в блок управления 5, где производится сравнение текущих линейных скоростей V1 тек и V2 тек с предварительно введенными в блок управления 5 величинами требуемых линейных скоростей V1 тр и V2 тр, достигаемых штоками гидравлических толкателей 2 в момент отделения груза и рассчитывается разность между величинами требуемых линейных скоростей V1 тр и V2 тр, достигаемых штоками гидравлических толкателей 2 в момент отделения груза, и величинами текущих линейных скоростей V1 тек и V2 тек, достигаемых штоками гидравлических толкателей 2 в процессе их перемещения, для каждого толкателя 2:
ΔV1=V1 тр-V1 тек;
ΔV2=V2 тр-V2 тек
По полученным значениям погрешностей ΔV1 и ΔV2 в блоке управления 5 по определенному алгоритму формируются команды на управление клапанами электрогидравлических блоков клапанов 3. Управляющие сигналы из блока управления 5 поступают на блоки электрогидравлических клапанов 3 соответствующих гидравлических толкателей 2, что обеспечивает регулирование поступления рабочей жидкости в полости гидравлических толкателей 2. Управляющие сигналы будут формироваться блоком управления 5 до тех пор, пока не будут соблюдены условия:
V1 тек=V1 тр
V2 тек=V2 тр
В момент достижения штоками гидравлических толкателей 2 линейных скоростей V1 тек=V1 тр и V2 тек=V2 тр величина текущей угловой скорости груза ωтек будет соответствовать заданной расчетной величине угловой скорости груза ωтр:
ωтек=ωтр
В этот момент перемещение гидравлических толкателей 2 прекратится и произойдет сброс груза.
В процессе перемещения штоков гидравлических толкателей 2 вытесняемая из толкателей 2 рабочая жидкость через выходные каналы 3.3, 3.4 блоков электрогидравлических клапанов 3 поступает в блок гидроаккумуляторов 7.
Таким образом, отслеживание воздействия внешних факторов на закрепленный в авиационном пусковом устройстве груз осуществляется за счет отслеживания текущих линейных скоростей перемещения V1 тек и V2 тек штоков каждого из гидравлических толкателей 2 до момента, при котором величины данных скоростей не совпадут с заранее определенными величинами требуемых линейных скоростей перемещения V1 тр и V2 тр штоков соответствующих гидравлических толкателей 2. В момент достижения штоками гидравлических толкателей 2 линейных скоростей V1 тек=V1 тр и V2 тек=V2 тр величина текущей угловой скорости груза ωтек будет соответствовать заданной расчетной величине угловой скорости груза ωтр, и производится сброс груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный способ и устройство принудительного сброса-катапультирования груза | 2020 |
|
RU2748561C1 |
| Адаптивный способ и устройство принудительного сброса - катапультирования груза | 2017 |
|
RU2692287C2 |
| БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2012 |
|
RU2521446C1 |
| ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ ДЛЯ МОРСКОЙ ВОДЫ | 2014 |
|
RU2555635C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2009 |
|
RU2421637C2 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С НЕРЕВЕРСИВНЫМ НАСОСОМ | 2011 |
|
RU2484314C2 |
| Кран грузоподъемный | 2022 |
|
RU2790730C1 |
| ГИДРОПРИВОД С АВТОМАТИЧЕСКИМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ РЕГУЛЯТОРОМ ДАВЛЕНИЯ | 2010 |
|
RU2439382C2 |
| ЧЕТЫРЕХСЕКЦИОННЫЙ ПОГРУЖНОЙ БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ | 2022 |
|
RU2812560C1 |
| Система регулирования сопротивления механизированной крепи | 1980 |
|
SU881342A1 |
Изобретение относится к авиационной технике, в частности к устройствам, предназначенным для закрепления, транспортирования и принудительного отделения ракетного вооружения на летательных аппаратах, а конкретно - к авиационным катапультным устройствам (далее - АКУ). Способ принудительного сброса груза включает задание линейных перемещений штокам гидравлических толкателей. При этом в процессе линейных перемещений штоков гидравлических толкателей осуществляют измерение текущих линейных скоростей перемещения штока каждого гидравлического толкателя, после чего проводят сравнение полученных величин текущих линейных скоростей перемещения штоков гидравлических толкателей с заранее определенными величинами требуемых линейных скоростей перемещения штоков каждого гидравлического толкателя. Затем по разнице между величинами требуемой и текущей линейных скоростей штоков гидравлических толкателей формируют команды на управление штоками гидравлических толкателей таким образом, чтобы в момент сброса груза величины текущих линейных скоростей перемещения штоков гидравлических толкателей совпадали с величинами требуемых линейных скоростей перемещения штоков тех же гидравлических толкателей. При этом формирование упомянутых команд осуществляют с помощью управляющих устройств, выполненных в виде блоков быстродействующих электрогидравлических клапанов, гидравлически связанных своими входными каналами с выходными каналами гидрозамка, а выходными каналами - с гидроаккумулятором, причем входной канал гидрозамка гидравлически связан с пирогидравлическим источником энергии. Группа изобретений также относится к устройству для принудительного сброса груза. Обеспечивается высокая точность задания требуемой угловой скорости при отделении груза от устройства принудительного сброса, уменьшение массогабаритных характеристик устройства и улучшение его эксплуатационных характеристик. 2 н. и 1 з.п. ф-лы, 1 ил.
1. Способ принудительного сброса груза, включающий задание линейных перемещений штокам гидравлических толкателей, отличающийся тем, что в процессе линейных перемещений штоков гидравлических толкателей осуществляют измерение текущих линейных скоростей перемещения штока каждого гидравлического толкателя, после чего проводят сравнение полученных величин текущих линейных скоростей перемещения штоков гидравлических толкателей с заранее определенными величинами требуемых линейных скоростей перемещения штоков каждого гидравлического толкателя, затем по разнице между величинами требуемой и текущей линейных скоростей штоков гидравлических толкателей формируют команды на управление штоками гидравлических толкателей таким образом, чтобы в момент сброса груза величины текущих линейных скоростей перемещения штоков гидравлических толкателей совпадали с величинами требуемых линейных скоростей перемещения штоков тех же гидравлических толкателей, при этом формирование упомянутых команд осуществляют с помощью управляющих устройств, выполненных в виде блоков быстродействующих электрогидравлических клапанов, гидравлически связанных своими входными каналами с выходными каналами гидрозамка, а выходными каналами - с гидроаккумулятором, причем входной канал гидрозамка гидравлически связан с пирогидравлическим источником энергии.
2. Устройство для принудительного сброса груза, содержащее корпус, в котором установлены пирогидравлический источник энергии, два гидравлических толкателя со штоками, блок управления гидравлическими толкателями, два измерительных устройства и два управляющих устройства, установленных на гидравлических толкателях и электрически связанных с блоком управления гидравлическими толкателями, замково-стопорный механизм с устройством его открытия, отличающееся тем, что устройство снабжено гидроаккумулятором и гидрозамком, при этом измерительные устройства выполнены в виде датчиков скорости для измерения текущих линейных скоростей перемещения штоков гидравлических толкателей, а управляющие устройства выполнены в виде блоков быстродействующих электрогидравлических клапанов, гидравлически связанных своими входными каналами с выходными каналами гидрозамка, а выходными каналами - с гидроаккумулятором, причем входной канал гидрозамка гидравлически связан с пирогидравлическим источником энергии.
3. Устройство по п. 2, отличающееся тем, что устройство открытия замково-стопорного механизма выполнено в виде закрепленного на корпусе гидроцилиндра и гидравлически связанного с ним гидрораспределителя, причем входной канал гидрораспределителя гидравлически связан с пирогидравлическим источником энергии.
| Адаптивный способ и устройство принудительного сброса - катапультирования груза | 2017 |
|
RU2692287C2 |
| ОКРАШЕННОЕ ИЗВЕСТКОВО-НАТРИЕВОЕ СТЕКЛО | 2001 |
|
RU2327657C2 |
| RU 2009119570 A, 10.12.2010 | |||
| CN 111216892 A, 02.06.2020 | |||
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ И СБРОСА ГРУЗА С ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2402460C1 |

