Предлагаемое изобретение относится к авиационной технике, а именно к установкам авиационного вооружения с принудительным отделением авиационных грузов, таких как бомбы, контейнеры, ракеты, в частности к адаптивным балочным держателям.
Известны установки авиационного вооружения, которые включают системы принудительного отделения (катапультирования) грузов, представляющие собой нерегулируемые механизмы с пиротехническим приводом и одним толкателем, расположенным по центру масс подвешиваемого груза (см. описание конструкций держателей балочных в книге «Установки бомбардировочного вооружения летательных аппаратов», издательство «МАИ-ПРИНТ» 2010 г., стр.52-96, рисунки 2.17, 2.33).
Известны установки авиационного вооружения с двумя толкателями для крепления и сброса груза с летательного аппарата, использующие сжатый газ и средства управления им для подачи в камеры толкателей, см. патенты US №5583312 от 1996 г., №7648104 от 2010 г. заявка US №2004/0108415.
Известно устройство для крепления и сброса груза с летательного аппарата с пневматическим приводом и двумя толкателями, см. патент RU №2402460 от 2006 г., содержащее передний и задний узлы крепления, выполненные в виде пневмоцилиндров, закрепленных на летательном аппарате, надпоршневые полости которых сообщены с автономными пиротехническими устройствами для подачи сжатого газа, а груз содержит кронштейны крепления, и наружные концы штоков снабжены резьбовыми соединениями для крепления кронштейнов, при этом передний узел выполнен с возможностью передачи грузу большего импульса силы, чем импульс, передаваемый грузу задним узлом.
Известно также авиационное катапультное устройство, состоящее из пиропривода и двух гидроцилиндров, механически связанных с пироприводом и между собой при катапультировании, и передающих давление жидкости в камеры переднего и заднего толкателей, см. описание конструкции авиационного катапультного устройства, «Пусковые установки ракетного вооружения летательных аппаратов», издательство «ВВИА им. проф. Н.Е.Жуковского», 2005 г., стр.407-431, рисунок 7.4. Данное устройство является наиболее близким к предлагаемому изобретению и выбрано в качестве ближайшего аналога.
Достоинство данной конструкции по сравнению с системами, использующими управление только по газовому тракту, состоит в том, что управление отделением груза осуществляется гидросмесью, использование которой предпочтительнее ввиду ее несжимаемости.
Недостатком указанной конструкции, использующей механическую связь между передним и задним толкателями, является возникновение паразитных угловых колебаний при катапультировании. Однако главным и принципиальным недостатком известного устройства является то, что процессы изменения давления жидкости в камерах толкателей во время катапультирования заданы заранее и поэтому практически не зависят от режима полета носителя, т.е. устройство представляет собой систему с разомкнутым контуром управления, систему без обратной связи.
Отсюда следует невозможность учета влияния на параметры движения катапультируемого груза реальных внешних аэродинамических воздействий, изменяемых инерционно-массовых характеристик грузов, жесткости элементов подвески самолета и других факторов и, следовательно, невозможность обеспечения безопасного отделения груза во всем возможном диапазоне боевого применения носителя.
Безопасность отделения грузов достигается формированием установки авиационного вооружения таких начальных условий полета груза относительно самолета (линейной и угловой скорости груза), при которых обеспечивается положение координат центра масс груза в пределах допустимых значений на любых боевых режимах полета с целью исключения возможности соударения груза с самолетом, включая элементы его конструкции и установленные на нем грузы, а также обеспечивается сохранение системой стабилизации груза его пространственной устойчивости вблизи самолета.
Технической задачей изобретения является создание адаптивного балочного держателя с замкнутой системой управления принудительным отделением грузов, использующего независимые регулируемые гидротолкатели и обратные связи по реальным параметрам движения груза.
Техническим результатом является повышение безопасности отделения грузов во всем диапазоне режимов их боевого применения с самолета-носителя.
Поставленная задача решается тем, что в известном устройстве, состоящем из корпуса с размещенными в нем пироприводом, связанным с ним гидроцилиндром, который функционально связан с передним и задним гидротолкателями с узлами крепления груза, функциональная связь между гидроцилиндром и гидротолкателями выполнена через управляемые электрогидроклапаны, и балочный держатель дополнительно снабжен замкнутой системой управления принудительным отделением груза, выполненной в виде закрепленных на корпусе и на гидротолкателях датчиков линейных ускорений, выходы которых подключены к соответствующим входам аналого-цифровых преобразователей, выходы которых соединены со входами электронного вычислительного блока, к выходам которого подключены входы цифроаналоговых преобразователей, выходы которых через усилители аналоговых сигналов соединены со входами управляемых электрогидроклапанов.
Кроме того, пиропривод выполнен двухполостным в виде цилиндра с разделением промежуточной дросселирующей дюзой полости сгорания и рабочей полости, а передний гидротолкатель расположен ближе к центру масс груза, чем задний гидротолкатель.
На чертеже приведена структурная схема заявленного балочного держателя.
Адаптивный балочный держатель содержит двухполостной пиропривод 1, гидроцилиндр 2, два независимых регулируемых гидротолкателя 3.1, 3.2 с размещенными на них датчиками линейных ускорений 4.1, 4.2, датчик линейных ускорений 4.3, размещенный непосредственно на корпусе устройства, электронный вычислительный блок 5, управляемые электрогидроклапаны 6.1, 6.2, усилители 7.1, 7.2 и преобразователи сигналов - аналого-цифровые 8.1, 8.2, 8.3 и цифроаналоговые 8.4 и 8.5.
Двухполостной пиропривод 1 выполнен в виде цилиндра с разделением промежуточной дросселирующей дюзой полости сгорания и рабочей полости, что обеспечивает плавность нарастания давления в системе по сравнению с пироприводами с объединенной рабочей полостью и полостью сгорания, в которых изменение характеристик происходит скачкообразно.
В гидроцилиндре 2 продукты горения пиропривода 1 сжимают жидкость до большого давления, которая затем через управляемые электрогидроклапаны 6.1, 6.2 поступает к гидротолкателям 3.1, 3.2..
Два короткоходовых гидротолкателя 3.1 и 3.2 с узлами крепления груза размещены над ним в плоскости симметрии держателя на одной оси с ухватами (не показаны), распирающими груз. Каждый гидротолкатель управляется системой регулирования скорости его выдвижения и конструктивно исключает возможность перемещения груза в поперечной плоскости до конца хода толкателя.
При этом передний гидротолкатель 3.1, установленный ближе к центру масс груза, предназначен преимущественно для регулирования линейной скорости груза, а задний гидротолкатель 3.2, отстоящий дальше от центра масс груза, используется в основном для регулирования угловой скорости груза.
Датчики линейных ускорений 4.1-4.3 установлены на гидротолкателях (4.1,4.2) и на корпусе балочного держателя (4.3). Их аналоговые сигналы после оцифровки поступают в электронный вычислительный блок 5.
Электронный вычислительный блок 5 предназначен для выдачи сигналов на управляемые электрогидроклапаны 6.1, 6.2.
Электронный вычислительный блок 5 включает блок начальных условий 5.1, характеризующих геометрические и механические характеристики груза (масса, момент инерции относительно поперечной оси, расстояния между центром масс и точками толкания гидротолкателей) и устройства отделения (начальное давление от пиропатрона, начальный объем камеры сгорания пиропривода 1, масса пороховой навески, площадь пиропоршня и площади поршней толкателей, ходы толкателей), а также требуемые параметры отделения груза (вертикальная скорость центра масс груза, угловая скорость груза). Ввод начальных условий может производиться от бортового центрального вычислителя летательного аппарата.
В электронном вычислительном блоке 5 в блоке 5.2 рассчитываются текущие параметры движения груза и в соответствии с требуемым законом изменения линейной и угловой скоростей груза вырабатываются два управляющих сигнала на управляемые электрогидроклапаны 6.1, 6.2 для управления последующим движением отделяемого груза в каналах движения центра масс и углового движения.
Цифроаналоговые преобразователи 8.4 и 8.5 и усилители 7.1, 7.2 служат для преобразования выходных цифровых сигналов электронного вычислительного блока 5 во входные сигналы для управляемых электрогидроклапанов 6.1, 6.2.
Предлагаемое устройство функционирует следующим образом. При запуске процесса катапультирования поджигается пиропатрон, установленный в двухполостном пироприводе 1, и продукты его горения, проходя через промежуточную дюзу полостей пироцилиндра пиропривода, плавно сжимают до большого давления жидкость в гидроцилиндре 2. Жидкость начинает подаваться в управляемые электрогидроклапаны 6.1, 6.2, представляющие собой двухкаскадные золотниковые сервомеханизмы, содержащие регулируемые гидравлические дроссели, сечение которых регулируется смещением золотника, определяемым управляющими сигналами, поступающими с усилителей 7.1 и 7.2. Напор жидкости, протекающей через дроссели, поступает в гидроцилиндры толкателей 3.1, 3.2 и воздействует на поршни толкателей (не показаны). Поршни толкателей выдвигаются, преодолевая силы сопротивления со стороны груза. Таким образом, расход жидкости, поступающей в гидроцилиндры гидротолкателей 3.1, 3.2, а следовательно, и скорости движения поршней толкателей непрерывно регулируются изменением площади проходного отверстия управляемых дросселей электрогидроклапанов 6.1, 6.2.
Реальные текущие скорости гидротолкателей 3.1, 3.2 определяются в электронном вычислительном блоке 5.2 путем интегрирования их линейных ускорений, измеряемых датчиками линейных ускорений 4.2 и 4.1, установленных на гидротолкателях 3.1, 3.2, за вычетом собственного ускорения самолета, измеряемого датчиком 4.3, расположенным на корпусе балочного держателя. Затем определяются текущие кинематические параметры относительного движения груза (угол поворота, угловая скорость, угловое ускорение, линейное ускорение центра масс, линейная скорость центра масс, перемещение центра масс) и с их учетом вырабатываются управляющие сигналы для электрогидроклапанов 6.1, 6.2.
Введение новых узлов и блоков позволяет производить управление принудительным отделением груза с обратной связью по текущей информации о фактических линейных ускорениях толкателей, контактируемых с катапультируемым грузом, приходящей от датчиков линейных ускорений, т.е. делает балочный держатель адаптивным к воздействию изменяющихся внешних нагрузок.
Предлагаемое устройство позволяет автономно, без получения предварительных данных о действующих на груз аэродинамических нагрузках, и с высокой точностью обеспечить необходимые параметры безопасного отделения грузов на всех боевых режимах полета самолета. Математическое моделирование процесса показало достаточно высокую точность отработки заданных параметров отделения (линейной и угловой скорости груза).
Современный уровень техники позволяет осуществить практическую реализацию предлагаемого устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный способ и устройство принудительного сброса - катапультирования груза | 2017 |
|
RU2692287C2 |
| Способ принудительного сброса груза и устройство для его осуществления | 2023 |
|
RU2838573C1 |
| Адаптивный способ и устройство принудительного сброса-катапультирования груза | 2020 |
|
RU2748561C1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1999 |
|
RU2145565C1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1999 |
|
RU2145566C1 |
| МНОГОФУНКЦИОНАЛЬНЫЕ БОКОВЫЕ ГРУЗОВЫЕ ОТСЕКИ | 2022 |
|
RU2801985C1 |
| УНИВЕРСАЛЬНЫЙ БАЛОЧНЫЙ ДЕРЖАТЕЛЬ ДЛЯ ПРИМЕНЕНИЯ АВИАЦИОННЫХ БОМБОВЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2021 |
|
RU2763224C1 |
| ТРЕНАЖЕР ВОЗДУШНОГО БОЯ | 2005 |
|
RU2297674C2 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1998 |
|
RU2130866C1 |
| ДВИГАТЕЛЬ, ВЕРТОЛЕТ, МЕЛКОВОДНОЕ СУДНО | 1999 |
|
RU2153088C1 |
Изобретение относится к авиационной технике, а именно к установкам авиационного вооружения с принудительным отделением авиационных грузов. Балочный держатель содержит корпус с размещенными в нем пироприводом, связанным с ним гидроцилиндром, который функционально связан с передним и задним гидротолкателями с узлами крепления груза. Функциональная связь между гидроцилиндром и гидротолкателями выполнена через управляемые электрогидроклапаны, и балочный держатель дополнительно снабжен замкнутой системой управления принудительным отделением груза, выполненной в виде закрепленных на корпусе и на гидротолкателях датчиков линейных ускорений, выходы которых подключены к соответствующим входам аналого-цифровых преобразователей, выходы которых соединены со входами электронного вычислительного блока, к выходам которого подключены входы цифроаналоговых преобразователей, выходы которых через усилители аналоговых сигналов соединены со входами управляемых электрогидроклапанов. Достигается повышение безопасности отделения грузов во всем диапазоне режимов их боевого применения с самолета-носителя. 2 з.п. ф-лы, 1 ил.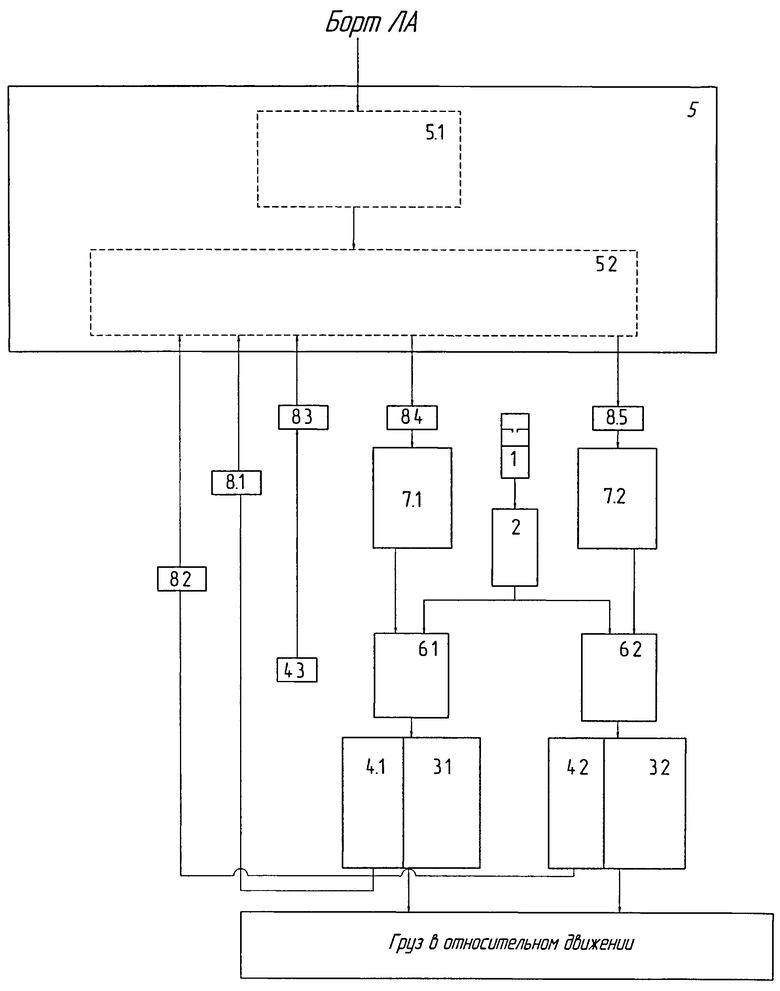
1. Балочный держатель, содержащий корпус с размещенными в нем пироприводом, связанным с ним гидроцилиндром, который функционально связан с передним и задним гидротолкателями с узлами крепления груза, отличающийся тем, что функциональная связь между гидроцилиндром и гидротолкателями выполнена через управляемые электрогидроклапаны, и балочный держатель дополнительно снабжен замкнутой системой управления принудительным отделением груза, выполненной в виде закрепленных на корпусе и на гидротолкателях датчиков линейных ускорений, выходы которых подключены к соответствующим входам аналого-цифровых преобразователей, выходы которых соединены со входами электронного вычислительного блока, к выходам которого подключены входы цифроаналоговых преобразователей, выходы которых через усилители аналоговых сигналов соединены со входами управляемых электрогидроклапанов.
2. Балочный держатель по п.1, отличающийся тем, что пиропривод выполнен двухполостным в виде цилиндра с разделением промежуточной дросселирующей дюзой полости сгорания и рабочей полости.
3. Балочный держатель по п.1, отличающийся тем, что передний гидротолкатель расположен ближе к центру масс груза, чем задний гидротолкатель.
| Способ получения эфиров и анилидов 4-аминобензоилуксусной кислоты | 1958 |
|
SU121795A1 |
| US 6663049 B1, 16.12.2003 | |||
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ И СБРОСА ГРУЗА С ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2402460C1 |
| СИСТЕМА УПРАВЛЕНИЯ СБРОСОМ ГРУЗА ИЗ ГРУЗООТСЕКА САМОЛЕТА | 1990 |
|
RU1795626C |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1998 |
|
RU2130866C1 |

