[01] Область техники
[02] Изобретение относится к областям электротехники и автоматизации управления технологическими процессами промышленных объектов, а именно к способу программного резервирования функций устройств релейной защиты и автоматики (РЗА) на цифровых подстанциях.
[03] Уровень техники
[04] Наиболее близким аналогом изобретения является способ резервирования функций РЗА, раскрытый в патенте РФ RU 2740683, 19.01.2021. В аналоге реализуется алгоритм распределения функций РЗА на основе торгов. В аналоге применяется устройство ввода-вывода с вычислительным модулем, в который заносят информацию о первичном оборудовании и наименования функций защиты, контроля и управления работой первичного оборудования. Вычислительным модулем осуществляют поиск устройств автоматики или защиты, находящихся в одной локально-вычислительной сети, по которой устройством ввода-вывода осуществляют мониторинг состояния устройств автоматики, имеющих функции защиты, контроля и управления. При возникновении неисправности устройства автоматики и пропадании устройства посредством устройства ввода-вывода устанавливают факт пропадания устройства автоматики или защиты и осуществляют для каждой указанной функции, которая выполнялась отказавшим устройством автоматики, действия по запросу и определению величины штрафной функции, выбору устройства РЗА с наименьшей величиной штрафной функции, запуску этой функции и передаче информации о запуске функции. Основным недостатком указанного аналога является наличие для каждой группы функций РЗ единственного узла принятия решения, при выходе из строя которого произойдет утеря контроля за его функциями. В предложенном способе предполагалось резервирование узла принятия решения путем дублирования.
[05] Указанный недостаток определяет основную техническую проблему, на решение которой направлено заявленное изобретение.
[06] Раскрытие сущности изобретения
Техническим результатом изобретения является возможность программного резервирования функций релейной защиты путем распределенного принятия решения о размещении функций с поврежденного устройства на работоспособное за счет постоянного мониторинга состояния платформ между собой и независимого расчета времени запуска функций на основе текущего состояния платформы.
[07] Указанный технический результат достигается в заявленном изобретении за счет того, что способ программного резервирования функций устройств релейной защиты и автоматики (РЗА) использует платформы (1, 2) программного распределения функций (ПРФ), включающие: модуль обмена UDP сообщениями (3) с информацией о текущем составе функций на каждом устройстве РЗА; модуль расчета целевой функции:
(4) для определения времени запуска функций; модуль управления запуском функций;
(5) на платформе; модуль сбора и отправки статуса ПРФ (10) модулю супервизор. Причем способ предусматривает: обмен сообщениями между модулями обмена UDP сообщениями (3) платформ ПРФ (1, 2) о текущем состоянии платформы (1, 2) и текущих запущенных функциях РЗА; обнаружение модулем обмена UDP сообщениями (3) изменений состава функций и передачу информации о пропавших функциях, появившихся функциях и задублированных функциях в модуль расчета целевой функции (4); расчет модулем расчета целевой функции (4) величины функции в виде задержки времени на старт для конкретной функции РЗА; выдержку модулем расчета целевой функции (4) времени перед отправкой команды на старт функции; отправку модулем расчета целевой функции (4) команды на старт функции РЗА в модуль управления запуском функций, если за время выдержки в ходе получения UDP пакетов с других платформ не было получено информации о меньшем значении функции РЗА на другой платформе; передачу модулем управления запуском функций списка запущенных функций в модуль сбора и отправки статуса ПРФ и отправку информации о статусе платформы в модуль супервизор.
[08] Указанный результат также достигается в частных вариантах реализации изобретения за счет того, что:
[09] - время выдержки модулем расчета целевой функции перед отправкой команды на старт функции РЗА составляет 1,5-2Т, где Т задаваемый параметр времени, зависящий от качества сети;
[010] - параметр Т задается в пределах от 15 до 500 мс;
[011] - обмен сообщениями между модулями обмена UDP сообщениями (3) платформ ПРФ (1, 2) осуществляют с периодичностью (dt), равной Т/3;
[012] - в платформах ПРФ (1, 2) дополнительно используют модуль определения подключения к сети (6), который определяет текущее состояние подключения платформы и отправляет данные в модуль расчета целевой функции (4);
[013] - в платформах ПРФ (1, 2) дополнительно используют модуль мониторинга физического состояния платформы (9), который осуществляет прием информации о статусе функций от модуля супервизор и отправку данных об изменении физического состояния функций в модуль расчета целевой функции (4);
[014] - в платформах ПРФ (1, 2) дополнительно используют модуль мониторинга состава SV (7), который осуществляет прием информации от модуля супервизор, которая содержит состав потоков SV, принимаемых платформой и необходимых для работы функций релейной защиты (РЗ) и отправку данных в модуль расчета целевой функции (4);
[015] - в платформах ПРФ (1, 2) дополнительно используют модуль мониторинга состава GOOSE (8), который осуществляет прием информации от модуля супервизор, которая содержит состав потоков GOOSE, принимаемых платформой и необходимых для работы функций РЗ и отправку данных в модуль расчета целевой функции (4).
[016] Краткое описание чертежей
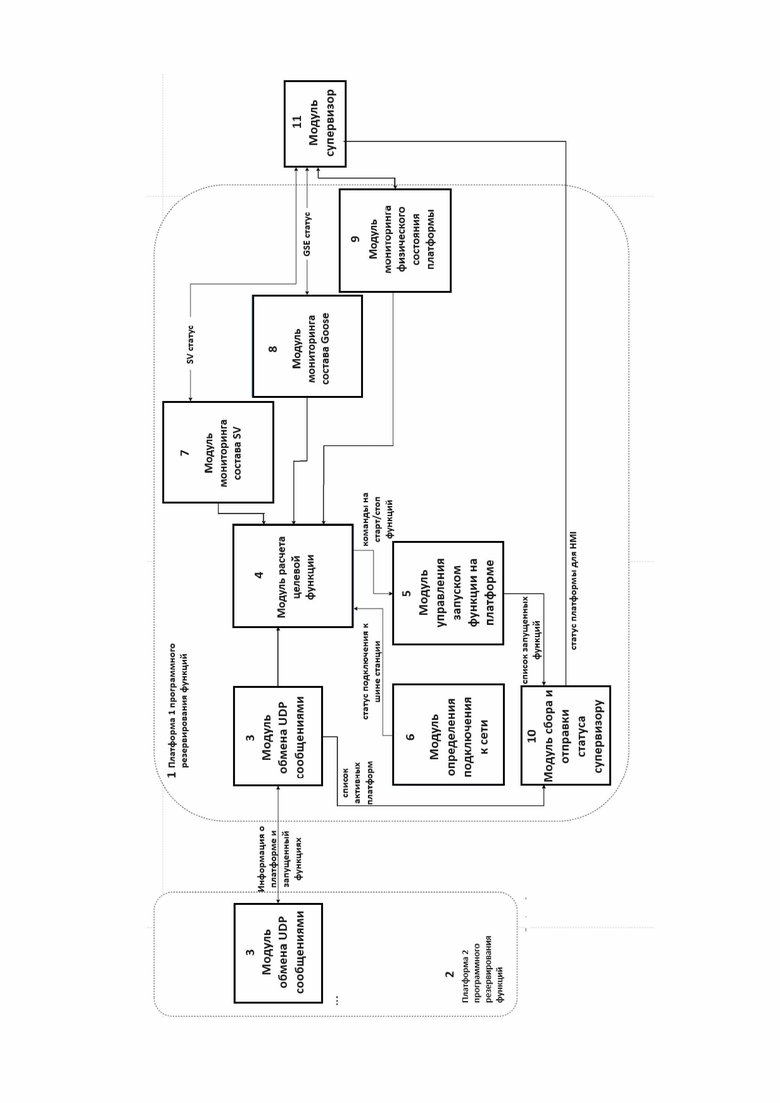
[017] Изобретение поясняется фигурой, где показана архитектура платформ программного распределения функций, используемых для реализации заявленного способа.
[018] Элементы обозначены на фигурах следующими позициями:
1 - первая платформа программного резервирования функций;
2 - вторая платформа программного резервирования функций;
3 - модуль обмена UDP сообщениями;
4 - модуль расчета целевой функции;
5 - модуль управления запуском функций на платформе;
6 - модуль определения подключения к сети;
7 - модуль мониторинга состава SV;
8 - модуль мониторинга состава GOOSE;
9 - модуль мониторинга физического состояния платформы;
10 - модуль отправки статуса супервизору;
11 – модуль супервизор.
[019] Осуществление изобретения
[020] Заявленный способ реализуется с помощью системы, включающей множество взаимодействующих платформ (1, 2) программного распределения функций (см. схему в графической части).
[021] Каждая платформа ПРФ включает следующие программные модули:
[022] - Модуль обмена UDP сообщениями (3). Предназначен для связи с другими платформами, приема и отправки сообщений с информацией о платформе и текущем составе функций на каждом из узлов системы;
[023] - Модуль расчета целевой функции (4). Связан с модулем обмена UDP сообщениями (3). Реализует: прием списка пропавших и появившихся в системе функций и списка задублированных функций; расчет времени запуска функций с учетом текущего состояния платформы и разрешения проблем дублирования функций (коллизий) на разных платформах; отправку команды на старт/стоп функции РЗА модулю управления запуском функции на платформе (5);
[024] - Модуль управления запуском функций на платформе (5). Связан с модулем расчета целевой функции (4). Реализует: прием команды на старт/стоп функции РЗА и взаимодействие с модулем супервизор (Supevisor) для управления жизненным циклом функций по протоколу TCP для отправки ему команд от модуля расчета целевой функции;
[025] - Модуль определения подключения к сети (6). Связан с модулем расчета целевой функции (4). Определяет текущее состояние подключения устройства к шине станции для исключения ситуации полного запуска всех функций на платформе, при потере связи с сетевым коммутатором отправляет информацию о состоянии подключения модулю расчета целевой функции при изменении состояния, и отправку информации о запущенных функциях модулю обмена UDP сообщениями (3);
[026] - Модуль мониторинга состава SV (7) (SV - Sampled Values - протокол передачи оцифрованных мгновенных значений от измерительных трансформаторов тока и напряжения). Связан с модулем расчета целевой функции (4) и модулем супервизор (11). Получает текущую информацию о доступных SV потоках для работы функций РЗ (токи, напряжения, состояния выключателей и др.) от модуля-супервизора (11) по TCP и передает ее модулю расчета целевой функции (4);
[027] - Модуль мониторинга состава GOOSE (7) (GOOSE - Generic Object-Oriented Substation Event - протокол и сервис, предназначенный для обмена сигналами между устройствами РЗА в цифровом виде). Связан с модулем расчета целевой функции (4) и модулем супервизор (11). Получает текущую информацию о доступных GOOSE потоках для работы функций РЗ (токи, напряжения, состояния выключателей и др.) от модуля супервизор (11) по TCP и передает ее модулю расчета целевой функции (4);
[028] - Модуль мониторинга физического состояния платформы (8). Связан с модулем расчета целевой функции (4) и модулем супервизор (11). Получает события неисправностей на физической платформе от модуля супервизор (11) по TCP и передает ее модулю расчета целевой функции (4).
[029] Модуль сбора и отправки статуса ПРФ супервизору для последующей передачи в HMI (человеко-машинный интерфейс). Связан с модулем супервизор (11) и с модулем обмена UDP сообщениями (3). Собирает от модуля (3) информацию о платформе: имя платформы, состав других платформ в сети, список проектных функций для размещения на текущей платформе, список фактически запущенных функций, и передает текущий статус в модуль-супервизор (11) по TCP для последующей передачи в сервис HMI.
[030] Для функционирования платформ (1, 2) в системе резервирования также предусмотрен внешний модуль супервизор (11), который собирает данные с модулей (7), (8), (9) и (10) и передает в человеко-машинный интерфейс HMI. Супервизор предоставляет информацию о наличии на устройстве потоков SV и GOOSE, состоянии запущенных функций и ошибок на устройстве. При запуске функций по решению ПРФ - команда передается на супервизор. Он производит запуск исполняемого файла функции РЗ.
[031] Способ программного распределения функций (ПРФ) по физическим устройствам РЗА основан на постоянном обмене информацией между платформами (1, 2), представляющими устройства защиты и автоматики (узлами системы).
[032] Для обмена информацией между узлами платформы (1, 2) используют модули обмена сообщениями UDP (3). В пакете UDP периодически отправляется информация о текущей платформе и текущих запущенных функциях РЗА с рассчитанным значением целевой функции (fit function - FF) для каждой функции РЗА. Период отправки обычно составляет dt=T/3. Т - параметр времени в миллисекундах, который задается в конфигурационном файле, является изменяемым и зависит от качества сети. При плохом качестве сети Т может достигать 500 мс, при хорошем - 15-20 мс. От параметра Т зависит скорость детектирования пропажи/появления функций, а также значение выдержки времени на запуск функций РЗА на устройствах. Модуль UDP также производит мониторинг других узлов системы в сети и уведомляет модуль сбора и отправки статуса ПРФ (10) об изменении состава функций на других платформах. Платформа считается «мертвой», если пакет UDP от нее не был получен за время Т.
[033] После обнаружения UDP пакетов с данными по платформам и запущенным на них функциям и в случае обнаружения изменения состава функций в системе информация об этом передается из модуля обмена UDP сообщениями (3) в модуль расчета целевой функции (4). Если была зафиксирована пропажа одной или нескольких функций в системе, модуль (4) для каждой из них рассчитывает величину целевой функции (FF) на основе ограничивающих параметров:
[034] - загруженность терминала;
[035] - подключение терминала к шине станции;
[036] - возможность запуска данной функции (наличие SV, GSE, вычислительной мощности);
[037] - соблюдение критериев надежности РЗА [038] - преднастройки терминала (порт приписки).
[039] Значение целевой функции определяет задержку до запуска потерянной функции на данном терминале. В общем случае, чем меньше выдержка по времени, тем более вероятен запуск функции на конкретном терминале. Если за время ожидания была получена информация, что эта функция была уже запущена (поставлена на отложенный старт) на другой платформе, задача по запуску функции отменяется.
[040] При малых временах Т возможны случаи, когда могут произойти коллизии: функции почти одновременно поставлены на старт на двух и более платформах. Для этих целей введен механизм разрешения конфликтов, который предусматривает пересчет значения целевой функции, чтобы решить, на какой платформе (1, 2) она должна остаться. Для этого процесс старта функции состоит из двух этапов:
[041] - выдержка времени, составляющего 1,5-2Г, непосредственно перед отправкой команды на старт функции РЗА, что исключает физический старт функции на платформе;
[042] - отправка команды на старт функции РЗА, если за время выдержки в ходе обработки UDP пакетов с других платформ не было информации о наиболее оптимальном размещении конкретной функции РЗА на другой платформе.
[043] Таким образом, каждый узел системы постоянно получает информацию от других узлов и формирует текущую картину распределения функций по терминалам. При изменении состава функций (пропажа части функций, отключение терминала, включение терминала, включение части функций и т.д.), все узлы независимо друг от друга рассчитывают значение целевой функции (fit function - FF), которое определяет задержку до запуска каждой необходимой для размещения функции РЗА на своей платформе. Узлы обмениваются данной информацией и определяют наилучшее место для размещения функции. Узел с наименьшим значением FF (т.е. с наименьшим временем запуска) запускает процесс старта функции РЗА и уведомляет об этом другие платформы.
[044] Все остальные платформы при обнаружении запущенной на старт функции РЗА на одной из машин не производят ее запуск, если она уже была поставлена в очередь на запуск процесса старта функции РЗА.
[045] Ниже приведен пример конкретной реализации способа.
[046] В системе существуют четыре устройства:
[047] - первый терминал, выполняющий функции максимальной токовой защиты первого трансформатора (МТЗ Т1);
[048] - второй терминал, выполняющий функции дифференциальной токовой защиты первого трансформатора (ДЗТ Т1);
[049] - третий терминал, выполняющий функции максимальной токовой защиты второго трансформатора (МТЗ Т2);
[050] - четвертый терминал, выполняющий функции дифференциальной токовой защиты первого трансформатора (ДЗТ Т2);
[051] Выходит из строя второй терминал. Его функцию ДЗТ Т1 нужно переместить на другие устройства. Параметр Т=45 мс.
[052] Терминалы независимо считают выдержку времени по целевой функции (ЦФ). Первый терминал получает значение ЦФ 35 мс, задержка на запуск будет 85 мс (35 мс от ЦФ+50 мс за штраф расположений в одном терминале основной и резервной защиты для одного оборудования Т1). Третий терминал получил значение ЦФ 35 мс (такое же, т.к. функция аналогичная), задержка на запуск будет 35 мс (35 мс от ЦФ, штрафа нет). Четвертый терминал получил значение ЦФ 25 мс, задержка на запуск будет 125 мс (25 мс от ЦФ+100 за штраф расположений в одном терминале двух основных функций для разного оборудования Т1 и Т2). Таким образом, для резервирования функции выбирается третий терминал с наименьшим значением ЦФ.
[053] В таблице 1 приведены данные по сравнению заявленного способа программного резервирования функций и способа согласно выбранному ближайшему аналогу.
[054] Таблица 1

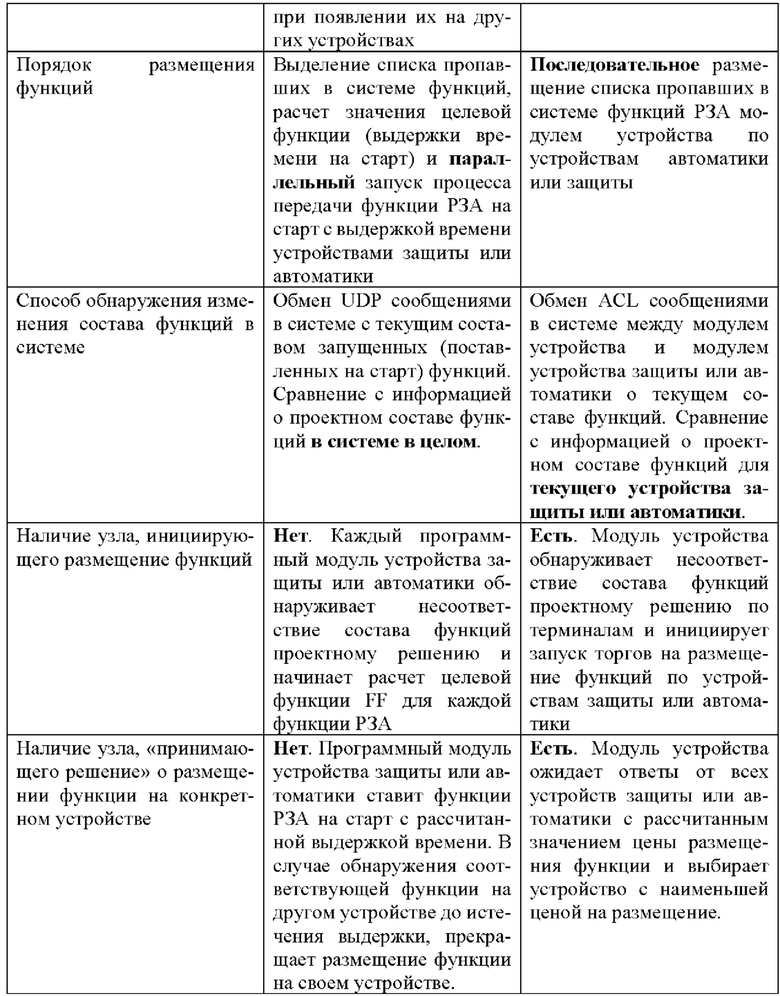
[055] Таким образом, благодаря описанному выше алгоритму размещения функций РЗА, обеспечивается решение задачи программного резервирования функций РЗА по терминалам в системе в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ резервирования функций микропроцессорных терминалов релейной защиты и автоматики и автоматизированной системы управления технологическими процессами с помощью подменной панели | 2024 |
|
RU2838837C1 |
| СПОСОБ ПРОВЕДЕНИЯ ЭЛЕКТРИЧЕСКИХ ИСПЫТАНИЙ МИКРОПРОЦЕССОРНОГО УСТРОЙСТВА РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ | 2024 |
|
RU2838834C1 |
| Централизованное интеллектуальное электронное устройство системы автоматизированной электрической подстанции | 2019 |
|
RU2720318C1 |
| Способ передачи измерений в технологической сети передачи данных | 2020 |
|
RU2738887C1 |
| СИСТЕМА АВТОМАТИЗАЦИИ С ДИНАМИЧЕСКОЙ ФУНКЦИОНАЛЬНОЙ АРХИТЕКТУРОЙ | 2018 |
|
RU2679739C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| Способ восстановления измерений для целей автоматизированных систем управления | 2021 |
|
RU2773717C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ СТАТИСТИКИ ТРАФИКА СЕТИ ПО N-СЕКУНДНЫМ ИНТЕРВАЛАМ | 2018 |
|
RU2703159C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДОБАВЛЕНИЯ НОВОГО ЧЛЕНА К АКТИВНОМУ ГРУППОВОМУ ВЫЗОВУ В СЕТИ ГРУППОВОЙ СВЯЗИ | 2003 |
|
RU2316146C2 |
| СПОСОБ РЕКОНФИГУРИРОВАНИЯ, КОНТРОЛЛЕР РАДИОСЕТИ И ТЕРМИНАЛ | 2012 |
|
RU2556023C2 |
Изобретение относится к областям электротехники и автоматизации управления технологическими процессами промышленных объектов. Техническим результатом является обеспечение резервирования функций релейной защиты. Способ содержит: обмен сообщениями между модулями обмена UDP сообщениями платформ программного распределения функций (ПРФ) о текущем состоянии платформы и текущих запущенных функциях релейной защиты и автоматики (РЗА); обнаружение модулем обмена UDP сообщениями изменений состава функций и передача информации о пропавших функциях, появившихся функциях и задублированных функциях в модуль расчета целевой функции; расчет модулем расчета целевой функции величины функции в виде задержки времени на старт для конкретной функции РЗА; выдержка модулем расчета целевой функции времени перед отправкой команды на старт функции; отправку модулем расчета целевой функции команды на старт функции РЗА в модуль управления запуском функций, если за время выдержки в ходе получения UDP пакетов с других платформ не было получено информации о меньшем значении функции РЗА на другой платформе; передачу модулем управления запуском функций списка запущенных функций в модуль сбора и отправки статуса ПРФ и отправку информации о статусе платформы в модуль супервизор. 7 з.п. ф-лы, 1 табл., 1 ил.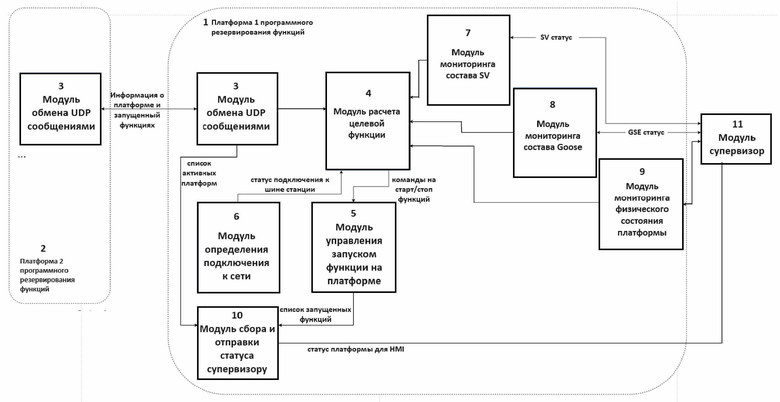
1. Способ программного резервирования функций устройств релейной защиты и автоматики (РЗА), предусматривающий использование платформ (1, 2) программного распределения функций (ПРФ), содержащих:
- модуль обмена UDP сообщениями (3) с информацией о текущем составе функций на каждом устройстве РЗА;
- модуль расчета целевой функции (4) для определения времени запуска функций;
- модуль управления запуском функций (5) на платформе;
- модуль сбора и отправки статуса ПРФ (10) модулю супервизор (11),
причем способ включает:
- обмен сообщениями между модулями обмена UDP сообщениями (3) платформ ПРФ (1, 2) о текущем состоянии платформы (1, 2) и текущих запущенных функциях РЗА;
- обнаружение модулем обмена UDP сообщениями (3) изменений состава функций и передачу информации о пропавших функциях, появившихся функциях и задублированных функциях в модуль расчета целевой функции (4);
- расчет модулем расчета целевой функции (4) величины функции в виде задержки времени на старт для конкретной функции РЗА;
- выдержку модулем расчета целевой функции (4) времени перед отправкой команды на старт функции;
- отправку модулем расчета целевой функции (4) команды на старт функции РЗА в модуль управления запуском функций, если за время выдержки в ходе получения UDPпакетов с других платформ не было получено информации о меньшем значении функции РЗА на другой платформе;
- передачу модулем управления запуском функций списка запущенных функций в модуль сбора и отправки статуса ПРФ и отправку информации о статусе платформы в модуль супервизор.
2. Способ по п. 1, отличающийся тем, что время выдержки модулем расчета целевой функции перед отправкой команды на старт функции РЗА составляет 1,5-2T, где T – задаваемый параметр времени в мс, зависящий от качества сети.
3. Способ по п. 2, отличающийся тем, что параметр Т задается в пределах от 15 до 500 мс.
4. Способ по п. 2 или 3, отличающийся тем, что обмен сообщениями между модулями обмена UDP сообщениями (3) платформ ПРФ (1, 2) осуществляют с периодичностью (dt), равной T/3.
5. Способ по п. 1, отличающийся тем, что в платформах ПРФ (1, 2) дополнительно используют модуль определения подключения к сети (6), который определяет текущее состояние подключения платформы и отправляет данные в модуль расчета целевой функции (4).
6. Способ по п. 1, отличающийся тем, что в платформах ПРФ (1, 2) дополнительно используют модуль мониторинга физического состояния платформы (9), который осуществляет прием информации о статусе функций от модуля супервизор и отправку данных об изменении физического состояния функций в модуль расчета целевой функции (4).
7. Способ по п. 1, отличающийся тем, что в платформах ПРФ (1, 2) дополнительно используют модуль мониторинга состава SV (7), который осуществляет прием информации о текущих потоках SV, принимаемых на данной платформе, и отправку данных в модуль расчета целевой функции (4).
8. Способ по п. 1, отличающийся тем, что в платформах ПРФ (1,2) дополнительно используют модуль мониторинга состава GOOSE (8), который осуществляет прием информации о текущих потоках GOOSE, принимаемых на данной платформе, и отправку данных в модуль расчета целевой функции (4).
| Способ перераспределения функций между устройствами автоматики при возникновении неисправностей в автоматизированной системе | 2020 |
|
RU2740683C1 |
| СИСТЕМА АВТОМАТИЗАЦИИ С ДИНАМИЧЕСКОЙ ФУНКЦИОНАЛЬНОЙ АРХИТЕКТУРОЙ | 2018 |
|
RU2679739C1 |
| СИСТЕМА РЕЛЕЙНОЙ ЗАЩИТЫ, КОНТРОЛЯ И УПРАВЛЕНИЯ ЭЛЕКТРОТЕХНИЧЕСКИМ ОБОРУДОВАНИЕМ | 2014 |
|
RU2576975C1 |
| Централизованное интеллектуальное электронное устройство системы автоматизированной электрической подстанции | 2019 |
|
RU2720318C1 |
| CN 104253483 B, 04.01.2017 | |||
| CN 110401175 A, 01.11.2019. | |||

