[01] Область техники
[02] Изобретение относится к способам мониторинга оборудования в автоматизированной системе управления промышленных объектов и может быть использовано в электротехнике и других областях для восстановления данных измерений оборудования.
[03] Уровень техники
[04] Применение закона Кирхгоффа для восстановления измерений в устройствах релейной защиты широко известно их уровня техники. Существующие подходы полагаются на заранее заданные параметры измерений, передаваемых по локальной вычислительной сети, и имеют жестко прописанную логику работы. Такие алгоритмы требуют предварительного проектирования и отдельной настройки каждого устройства при изменении главной схемы таких электроэнергетических объектов, как электростанции и подстанция.
[05] Известны технические требования к автоматизированному мониторингу устройств релейной защиты и автоматики (РЗА) (СТО 34.01-4.1-007-2018), в том числе требования по стандарту МЭК 61850 от 23.03.2018. В рамках указанного стандарта рассматривается мониторинг исправности РЗА на основе сравнения измеренных основных воздействующих величин от нескольких наблюдаемых устройств РЗА для контроля исправности вторичных цепей. Должно осуществляться сравнение измеренных величин устройств РЗА, подключенных к одной системе (секции) шин. В соответствии с первым Законом Кирхгофа сумма значений силы тока присоединений, подключенных к одной системе шин должна быть равной нулю. Возникновение небаланса свидетельствует о неисправности вторичных цепей или некорректном измерении входных воздействующих величин наблюдаемыми устройствами РЗА. Однако не рассматривается вопрос восстановления измерений для целей РЗА при потере данных от измерительных трансформаторов тока и напряжения. Т.е. аналог не решает проблему выявления исправности отдельных элементов устройств РЗА и восстановления недостающих измерений при исправности каналов связи и системы РЗА в целом.
[06] Из уровня техники известен способ мониторинга оборудования в автоматизированной системе управления тепловой станцией (см. патент Китая на полезную модель CN202025227, 02.11.2011, наиболее близкий аналог). Система включает промышленную сеть CAN, устройство связи, имеющий вычислительный модуль (ЦП), выполняющее функцию локального контроллера управления, а также устройства ввода-вывода, снабженные вычислительными модулями и подключенные к сети и к первичному оборудованию, имеющему коммутационные устройства. Согласно способу, модуль связи запрашивает, а устройства ввода-вывода собирают данные об измерениях, необходимых для выполнения функций автоматики, с первичного оборудования, с которыми имеется непосредственная технологическая связь. При необходимости цифровое и аналоговое устройства ввода-вывода могут обмениваться данными об измерениях. Указанные значения измерений передаются в устройство связи (локальный контроллер) для направления в центр обработки данных и получения инструкций на управления функциями автоматики.
[07] Недостатком аналога также является отсутствие возможности восстановления отсутствующих значений измерений параметров.
[08] Раскрытие сущности изобретения
[09] Основной технической проблемой, на решение которой направлено рассматриваемое изобретение, является потеря данных измерений параметров работы оборудования в автоматизированных системах управления.
[010] Техническим результатом изобретения является обеспечение возможности восстановления отсутствующих значений измерений параметров в автоматизированной системе управления. В частности, может обеспечиваться возможность получения недостающих значений электрических параметров для релейной защиты и автоматики на основе расчета мгновенных значений тока.
[011] Для решения указанной проблемы и достижения указанного результата предлагается способ восстановления измерений в автоматизированной системе управления, которая включает: контроллер управления, связанный с первичным оборудованием и снабженный основным вычислительным модулем, а также дополнительным вычислительным модулем для взаимодействия с основным вычислительным модулем; устройства ввода-вывода, связанные с контроллером управления через локальную вычислительную сеть (ЛВС) и с первичным оборудованием и снабженные основным вычислительным модулем, а также дополнительным вычислительным модулем для управления запуском функций автоматики в контроллере управления. При этом способ предусматривает следующие операции. В дополнительный вычислительный модуль каждого устройства ввода-вывода вводят информацию о первичном оборудовании, к которому подключены измерительные цепи устройства ввода-вывода, и о первичном оборудовании, с которым имеется непосредственная технологическая связь. Перед началом выполнения функции автоматики посредством дополнительного вычислительного модуля контроллера управления проверяют путем анализа передаваемых данных по ЛВС возможность получения измерений, необходимых для выполнения функций автоматики, и при отсутствии необходимых измерений посредством дополнительного вычислительного модуля контроллера управления передают сообщение всем устройствам ввода-вывода, находящимся в той же ЛВС, что и контроллер управления, с запросом измерений, необходимых для выполнения функции автоматики, и указанием первичного оборудования, к которому относятся эти измерения. Посредством дополнительного вычислительного модуля устройств ввода-вывода получают сообщение с запросом измерений и проверяют, имеется ли непосредственная технологическая связь с первичным оборудованием, указанным в сообщении. Затем при наличии измерений параметров работы оборудования, указанного в сообщении от контроллера управления, и наличии непосредственной технологической связи между первичным оборудованием через дополнительный вычислительный модуль устройства ввода-вывода отправляют котроллеру управления сообщение с указанием параметров передаваемых измерений по ЛВС, причем если устройство ввода-вывода имеет непосредственную технологическую связь с первичным оборудованием, указанным в сообщении от контроллера управления, но не имеет необходимых измерений, то посредством дополнительного вычислительного модуля этого устройства ввода-вывода отправляют сообщения другим устройствам ввода-вывода, первичное оборудование которых имеет непосредственную технологическую связь с оборудованием данного устройства ввода-вывода, а после получении устройством ввода-вывода ответного сообщения от других устройств ввода-вывода, посредством дополнительного вычислительного модуля устройства ввода-вывода отправляют по ЛВС параметры потоков измерений в контроллер управления. Затем посредством контроллера управления рассчитывают по заданным соотношениям недостающие значения измерений с учетом текущего состояния технологической схемы объекта управления.
[012] Кроме того, указанный технический результат достигается в частных вариантах реализации изобретения за счет того, что:
[013] - при отправке дополнительным вычислительным модулем устройства ввода-вывода сообщения котроллеру управления с указанием параметров передаваемых измерений по ЛВС (8) учитывают положение коммутационных аппаратов или запорной арматуры, подключенных контактами измерения положения к данному устройству ввода-вывода;
[014] - в качестве параметров измерений рассчитывают значение силы тока или напряжения, или напора, или расхода;
[015] - в качестве контроллера управления используют интеллектуальные электронные устройства (ИЭУ);
[016] - в качестве устройств ввода-вывода используют устройства связи с объектом (УСО).
[017] Краткое описание чертежей
[018] Изобретение поясняется фигурами, где:
[019] На фигуре 1 показана принципиальная схемы системы, реализующей заявленный способ;
[020] На фигуре 2 показан пример подключения системы, реализующей заявленный способ;
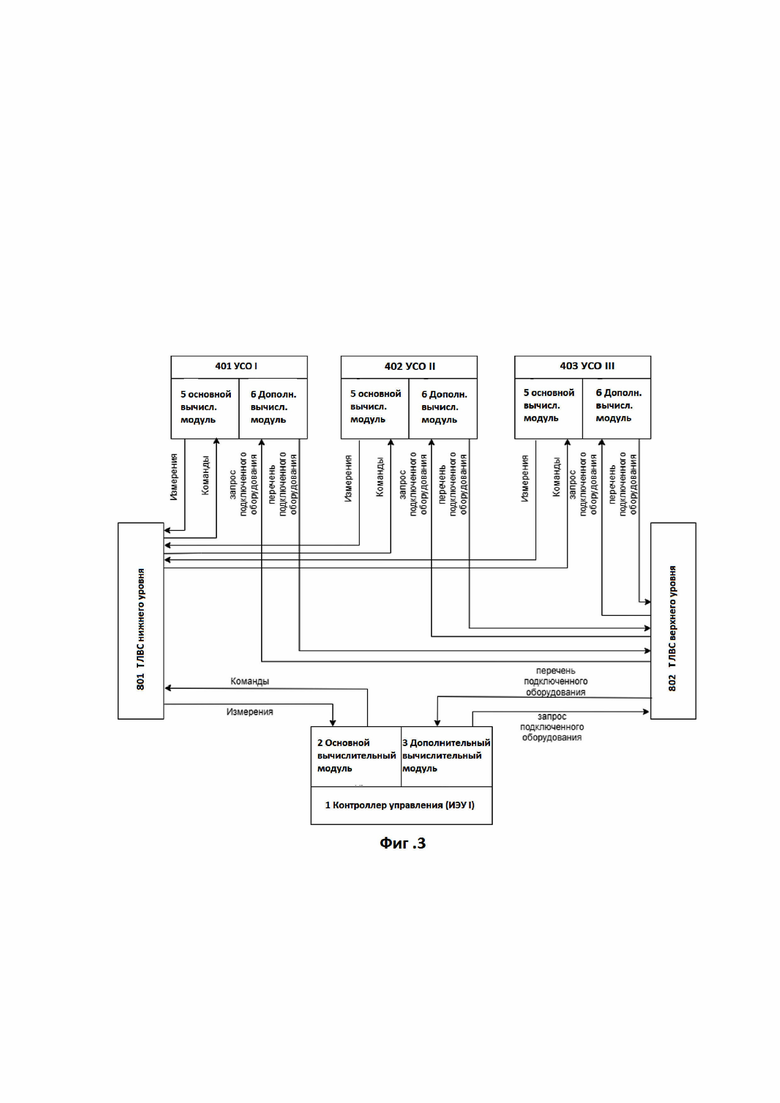
[021] На фигуре 3 показана схема соединения и взаимодействия устройств при реализации изобретения согласно примеру осуществления;
[022]
[023] Элементы на фигурах обозначены следующими позициями:
1 - контроллер управления (ИЭУ I);
2 - основной вычислительный модуль контроллера управления;
3 - дополнительный вычислительный модуль контроллера управления;
4 - устройство ввода-вывода;
401 - первое устройство ввода-вывода (УСО I);
402 второе устройство ввода-вывода (УСО II);
403 - третье устройство ввода-вывода (УСО III);
5 - основной вычислительный модуль устройства ввода-вывода;
6 - дополнительный вычислительный модуль устройства ввода-вывода;
7 - первичное оборудование;
8 - локальная вычислительная сеть (ЛВС);
801 - ТЛВС нижнего уровня (шина процесса);
802 - ТЛВС верхнего уровня (шина станции);
9 - коммутационный аппарат/запорная арматура;
10 - логическая связь контроллера управления с первичным оборудованием;
11 - связь устройств ввода-вывода с первичным оборудованием;
12 - связь устройств с ЛВС;
13 - технологическая связь между первичным оборудованием;
14 - линия электропередач (линия I, линия II);
15 - выключатели (BI, ВII);
17 - разъединители (PI.I, PI.II, PII.I, РII.II);
18 - заземляющие разъединители (ЗHI.I, ЗHI.II, ЗHII.I, ЗНII.II, ЗНIII);
19 - силовой трансформатор (TI);
20 - измерительные трансформаторы тока (TTI, ТТII, ТТIII)
21 - измерительный трансформатор напряжения (THI),
22 - шина (ШI),
I1, I2, I3 - сила тока,
[024] Осуществление изобретения
[025] Заявленный способ предназначен для автоматического формирования алгоритма восстановления измерений по данным измерений на смежных элементах технологической схемы объекта управления с учетом текущего состояния коммутационных аппаратов (выключатели, разъединители, заземляющие разъединители) или запорной арматуры, путем обхода графа технологической схемы объекта управления, узлами которого является первичное оборудование, а ребрами графа являются технологические связи между этим оборудованием.
[026] Способ реализуется посредством системы (фиг. 1), содержащей по меньшей мере один контроллер управления (1) и несколько устройств ввода-вывода (4).
[027] Контроллер управления (1) включает основной вычислительный модуль (2) и дополнительный вычислительный модуль (3) для взаимодействия с основным вычислительным модулем (2). Контроллер (1) также связан с первичным оборудованием (7) с помощью логической связи (10).
[028] Устройства ввода-вывода (4) имеют основной вычислительный модуль (5) и дополнительный вычислительный модуль (6) для управления запуском функций автоматики в контроллере управления (1). Устройства ввода-вывода (4) связаны (связь 11) с первичным оборудованием, а также коммутационными аппаратами (9) (для электрических систем) или запорной арматурой (для насосной системы), который в свою очередь связаны (связь 13) с первичным оборудованием (7).
[029] Контроллер управления (1) и устройства ввода-вывода (4) подключены к ЛВС (6) посредством связи (12).
[030] В частном случае реализации изобретения (см. фиг. 2, 3) устройства ввода-вывода (4) могут быть выполнены в виде устройств связи с объектом (УСО 401, 402, 403) (MU в соответствии со стандартом МЭК 61850). Устройства предназначены для сбора аналоговых и дискретных сигналов от первичного оборудования. Устройства (4) осуществляют оцифровку аналоговых и дискретных значений измеряемых параметров с передачей измеренных значений по сети Ethernet в технологическую локальную вычислительную сеть (ТЛВС) нижнего уровня (801) (шина процесса, process bus по стандарту МЭК 61850), а также изменение состояния дискретных выходов для управления оборудованием подстанции на основе команд получаемых от контроллеров управления (1) из технологической локальной вычислительной сети (801). Устройства ввода-вывода (4) могут передавать измерения в ТЛВС нижнего уровня с применением протоколов передачи данных (GOOSE, SampledValues) обеспечивающих широковещательную рассылку сообщений всем устройствам в ТЛВС нижнего уровня (801). Принимающие устройства (контроллеры управления 1) самостоятельно осуществляют фильтрацию входящих широковещательных сообщения для выделения необходимой для их работы информации в соответствии с настройками контроллера управления.
[031] Контроллеры управления (1) могут быть выполнены в виде интеллектуальных электронных устройств (ИЭУ) (IED в соответствии со стандартом МЭК 61850). Контроллеры имеют вычислительный модуль, подключаемого к ТЛВС нижнего уровня (801) (шина процесса) и ТЛВС верхнего уровня (802) (шина станции по стандарту МЭК 61850). Назначением ИЭУ является получение измерений от устройств ввода-вывода по ТЛВС нижнего уровня, получение команд управления от системы управления верхнего уровня (SCADA) по ТЛВС верхнего уровня, расчет алгоритмов автоматического управления и защиты первичного оборудования подстанции, передача команд управления первичным оборудованием в устройства ввода-вывода по ТЛВС нижнего уровня (802), передача информации о текущем режиме работы и измеренных параметров в систему управления верхнего уровня (SCADA) по ТЛВС верхнего уровня (802).
[032] В ходе эксплуатации системы защиты, автоматического и автоматизированного управления могут возникать неисправности, в результате которых часть измерений электрических параметров в виде широковещательных сообщений в ТЛВС нижнего уровня (801) может отсутствовать. К таким неисправностям относятся: нарушение электропитания устройств ввода-вывода (4), выход из строя устройств ввода-вывода (4) по причине внутренней неисправности, нарушение каналов связи ТЛВС нижнего уровня (801), выход из строя оборудования ТЛВС, неисправность первичных измерительных преобразователей (трансформаторы тока и напряжения), нарушение синхронизации времени устройств ввода-вывода (4). При этом функционирование алгоритмов защиты и автоматики, выполняемых в контроллерах управления останавливается ввиду отсутствия входных данных для работы алгоритмов.
[033] При реализации заявленного способа в дополнительный вычислительный модуль (6) устройств ввода-вывода (4) вводят информацию о первичном оборудовании (7), к которому подключены измерительные цепи соответствующих устройств ввода-вывода (4), и о первичном оборудовании (7), с которым имеется непосредственная технологическая связь.
[034] Перед началом выполнения функции автоматики посредством дополнительного вычислительного модуля (3) контроллера управления (1) проверяют возможность получения измерений, необходимых для выполнения функции автоматики, путем анализа передаваемых данных по локальной вычислительной сети (6) с применением шины полевого уровня.
[035] При отсутствии необходимых измерений посредством модуля (3) контроллера управления (1) передают сообщение всем устройствам ввода-вывода (4), находящимся в той же ЛВС (6), что и контроллер управления (1), с запросом измерений, необходимых для выполнения функции автоматики с указанием первичного оборудования (7), к которому относятся эти измерения. Дополнительные вычислительные модули (3) устройств ввода-вывода (4) получают запрос и проверяют, имеется ли непосредственная технологическая связь с первичным оборудованием (7), указанным в сообщении. При этом через устройства ввода-вывода (4) учитывают положение коммутационных аппаратов или запорной арматуры (9), подключенных контактами измерения положения к данному устройстве ввода-вывода (4).
[036] При наличии измерений технологических параметров (тока, напряжения, напора, расхода и др.), указанного в сообщении от контроллера управления (1) и наличии непосредственной технологической связи между первичным оборудованием (7) с учетом положения коммутационных аппаратов или запорной арматуры (9), через модуль (6) устройства ввода-вывода (4) отправляют контроллеру управления (1) сообщение с указанием параметров передаваемых измерений по технологической ЛВС (6). В случае если устройство ввода-вывода (4) имеет непосредственную технологическую связь с первичным оборудованием (7), но не имеет необходимых измерений, посредством модуля (6) устройства ввода-вывода (4) отправляют сообщения другим устройствам ввода-вывода (4), с которыми у оборудования данного устройства ввода-вывода (4) имеется непосредственная технологическая связь.
[037] При получении модулем (6) устройства ввода-вывода (4) ответного сообщения от других устройств ввода-вывода (4), через модуль (6) направляет сообщение в контроллер управления (1) с параметрами передачи по технологической ЛВС (6) потоков измерений.
[038] Контроллер управления (1) получает сообщение и рассчитывает по заданным математическим формулам недостающие значения измерений (ток, расход, напор и тд..) с учетом текущего состояния технологической схемы объекта управления.
[039] Таким образом, реализуется восстановление отсутствующих значений измерений параметров работы объекта управления для автоматики на основе расчета мгновенных значений измеренных параметров, что позволяет снизить затраты на проектирование и пуско-наладочные работы при вводе в эксплуатацию оборудования автоматики на промышленных объектах.
[040] Ниже приведен пример реализации изобретения. В качестве примера описан процесс мониторинга первичного оборудования для целей автоматического управления и релейной защиты на электрических подстанциях (см. фиг. 2).
[041] В состав контролируемого и защищаемого оборудования входят линии электропередач (14) (линия I, линия II), выключатели (16) (BI и ВII), разъединители (17) (PI.I, PI.II, PII.I, PII.II), заземляющие разъединители (18) (ЗHI.I, ЗШ.II, ЗHII.I, ЗНII.II, ЗНIII), силовой трансформатор (19) (TI), измерительные трансформаторы тока (20) (TTI, ТТII, ТТIII) и напряжения (21) (THI). Оборудование подстанции с помощью специализированных выводов и вводов подключается к устройствам ввода-вывода (401, 402, 403) в виде устройств связи с объектом (УСО). Для реализации способа в УСО (401, 402, 403) устанавливается дополнительный вычислительный модуль (6), в который загружается информация об оборудовании, к которому подключено данное УСО (401, 402, 403), а также идентификаторы оборудования, которое имеет непосредственную электрическую связь с оборудованием, контролируемым данным УСО. Согласно фигуре 2 УСО I (401) контролирует следующее оборудование: выключатель (16) BI, разъединители (17) PI.I и PI.II, заземляющий нож (18) ЗHI.I и ЗHI.II, трансформатор тока (20) TTI, трансформатор напряжения (21) THI. Оборудование, с которым у контролируемого УСО I (401) есть электрическая связь: шина (22) ШI, Линия 1(14). УСО II (402) контролирует следующее оборудование: ВII (16), PII.I, PII.II (17), ЗHII.I, ЗНII.II (18), ТТII (20), THI (21). Оборудование, с которым у контролируемого УСО II (402) есть электрическая связь: шина ШII (22), Линия II (14). УСО III (403) контролирует следующее оборудование: ЗНIII (18), ТТIII (20), THI (21). Оборудование, с которым у контролируемого УСО III (403) есть электрическая связь: шина ШI (22), трансформатор TI (19).
[042] Ввиду технических особенностей измерительных трансформаторов подключение к трансформаторам напряжения большого числа устройства реализуется проще, чем подключение большого числа устройств к трансформаторам тока, поэтому ТHI (21) подключен одновременно к УСО I (401), УСО II (402) и УСО III (403). УСО (401, 402, 403) посредством основного вычислительного модуля (5) осуществляют передачу в ЛВС нижнего уровня (шина процесса) (801) оцифрованных мгновенных значений измерений электрических параметров в виде широковещательного потока сообщений, доступных всем устройствам ЛВС нижнего уровня (801). При этом УСО (401, 402, 403) передают измерения в ТЛВС нижнего уровня (801) по строгому графику, привязанному к единой метке времени. Основной (5) и дополнительный (6) вычислительные модули УСО связаны по внутренней шине данных устройства.
[043] Контроллеры управления (1), выполненные в виде интеллектуальных электронных устройств (ИЭУ), посредством основного вычислительного модуля (2) подключены к ТЛВС нижнего уровня (801). ИЭУ I(1) посредством основного вычислительного модуля (2) осуществляют прием широковещательных потоков данных от УСО (401, 402, 403) и вычисление на их основе алгоритмов защиты и автоматики силового оборудования подстанции - в рассматриваемом примере это функция максимальной токовой защиты (МТЗ). Команды управления силовым оборудованием передаются от основного вычислительного модуля (2) ИЭУ I (1) в основной вычислительный модуль (5) УСО I (401) посредством передачи широковещательных сигналов по ТЛВС нижнего уровня (801). Потеря потока измерений электрических параметров от УСО I (401) может быть диагностирована по отсутствию потока широковещательных данных любым устройством, подключенным к ТЛВС нижнего уровня (801). В случае если УСО I (401) находится в работоспособном состоянии, но измерительный канал нарушен (поврежден измерительный трансформатор тока или напряжения, поврежден кабель от измерительных трансформаторов до УСО I), поток широковещательных данных будет содержать признак качества измерений, показывающий что они являются недостоверными. Схема соединения устройств УСО и ИЭУ приведена на фиг. 3.
[044] В любом из перечисленных случаев выполнение функции МТЗ в ИЭУ I (1), использующем недоступный поток измерений, прекращается. При этом дополнительный вычислительный модуль (3) ИЭУ I (1) запрашивает у дополнительных вычислительных модулей оставшихся в работе УСО II (402), УСО III (3) информацию о том, к какому силовому оборудованию подключены эти УСО и с каким силовым оборудованием они имеют непосредственную электрическую связь. Дополнительный вычислительный модуль (3) ИЭУ I (1) на основе полученной информации осуществляет построение графа подстанции и посредством обхода графа подстанции вычисляет какие УСО являются источниками измерений, на основе которых возможно вычисление недостающего потока измерений используя первый закон Кирхгоффа. Основной (2) и дополнительный (3) вычислительные модули ИЭУ I (1) связаны между собой по внутренней шине данных. Дополнительный вычислительный модуль (3) ИЭУ I(1) осуществляет перенастройку основного вычислительного модуля (2) таким образом, чтобы вместо приема измерений, которые стали недоступны, на вход алгоритмов защиты и автоматики поступали расчетные значений измерений, полученные путем вычисления мгновенных значений токов в узле по первому закону Кирхгоффа: I1+I2=I3. После этого дополнительный вычислительный модуль (3) возобновляет работу функции МТЗ в основном вычислительном модуле (2). Дополнительный вычислительный модуль (2) осуществляет мониторинг ТЛВС (801) нижнего уровня и в случае восстановления потока измерений от УСО I (401) осуществляет перенастройку основного вычислительного модуля (2) ИУЭ I(1) таким образом, чтобы на вход функции МТЗ поступали измерения из потока данных УСО I(401).
[045] Несмотря на то, что реализация изобретения иллюстрирована на примере электрической станции, заявленный способ может применяться для мониторинга работы другого оборудования, например, насосных станций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предотвращения аварийных действий при оперативном управлении технологическим объектом | 2020 |
|
RU2758449C1 |
| Способ перераспределения функций между устройствами автоматики при возникновении неисправностей в автоматизированной системе | 2020 |
|
RU2740683C1 |
| СПОСОБ ПРОВЕДЕНИЯ ЭЛЕКТРИЧЕСКИХ ИСПЫТАНИЙ МИКРОПРОЦЕССОРНОГО УСТРОЙСТВА РЕЛЕЙНОЙ ЗАЩИТЫ И АВТОМАТИКИ | 2024 |
|
RU2838834C1 |
| Способ резервирования функций микропроцессорных терминалов релейной защиты и автоматики и автоматизированной системы управления технологическими процессами с помощью подменной панели | 2024 |
|
RU2838837C1 |
| Централизованное интеллектуальное электронное устройство системы автоматизированной электрической подстанции | 2019 |
|
RU2720318C1 |
| Способ передачи измерений в технологической сети передачи данных | 2020 |
|
RU2738887C1 |
| Способ программного резервирования функций устройств релейной защиты и автоматики | 2024 |
|
RU2838826C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ РАЗВИТИЕМ УСТРОЙСТВ САМООБСЛУЖИВАНИЯ | 2017 |
|
RU2676030C1 |
| Способ управления вычислительным модулем системы автоматики | 2021 |
|
RU2756430C1 |
| Способ организации информационно-развлекательного контекстнозависимого обмена данными пользователями телекоммуникационной сети и система для его реализации | 2016 |
|
RU2662395C2 |


Изобретение относится к способам мониторинга оборудования в автоматизированной системе управления промышленных объектов и может быть использовано в электротехнике и других областях для восстановления данных измерений оборудования. Техническим результатом является обеспечение возможности восстановления отсутствующих значений измерений параметров. Способ содержит этапы: вводят информацию о первичном оборудовании, к которому подключены измерительные цепи устройства ввода-вывода, и о первичном оборудовании, с которым имеется непосредственная технологическая связь; проверяют возможность получения измерений, необходимых для выполнения функций автоматики, и при отсутствии необходимых измерений передают сообщение с запросом измерений, необходимых для выполнения функции автоматики, и указанием первичного оборудования, к которому относятся эти измерения; получают сообщение с запросом измерений и проверяют, имеется ли непосредственная технологическая связь с первичным оборудованием, указанным в сообщении; при наличии измерений параметров работы оборудования и наличии непосредственной технологической связи между первичным оборудованием отправляют сообщение с указанием параметров передаваемых измерений, причем если устройство ввода-вывода имеет непосредственную технологическую связь с первичным оборудованием, но не имеет необходимых измерений, то отправляют сообщения другим устройствам ввода-вывода, первичное оборудование которых имеет непосредственную технологическую связь с оборудованием данного устройства ввода-вывода, после получения ответного сообщения от других устройств ввода-вывода отправляют параметры потоков измерений в контроллер управления; и рассчитывают по заданным соотношениям недостающие значения измерений с учётом текущего состояния технологической схемы объекта управления. 4 з.п. ф-лы, 3 ил.
1. Способ восстановления измерений в автоматизированной системе управления, содержащей: контроллер управления (1), связанный с первичным оборудованием (7) и снабженный основным вычислительным модулем (2), а также дополнительным вычислительным модулем (3) для взаимодействия с основным вычислительным модулем (2); устройства ввода-вывода (4), связанные с контроллером управления через локальную вычислительную сеть (ЛВС) (8) и с первичным оборудованием (7) и снабженные основным вычислительным модулем (5), а также дополнительным вычислительным модулем (6) для управления запуском функций автоматики в контроллере управления (1),
при этом способ предусматривает следующие операции:
в дополнительный вычислительный модуль (6) каждого устройства ввода-вывода (4) вводят информацию о первичном оборудовании (7), к которому подключены измерительные цепи устройства ввода-вывода (4), и о первичном оборудовании (7), с которым имеется непосредственная технологическая связь;
перед началом выполнения функции автоматики посредством дополнительного вычислительного модуля (3) контроллера управления (1) проверяют путем анализа передаваемых данных по ЛВС (8) возможность получения измерений, необходимых для выполнения функций автоматики, и при отсутствии необходимых измерений посредством дополнительного вычислительного модуля (3) контроллера управления (1) передают сообщение всем устройствам ввода-вывода (4), находящимся в той же ЛВС (8), что и контроллер управления (1), с запросом измерений, необходимых для выполнения функции автоматики, и указанием первичного оборудования (7), к которому относятся эти измерения;
посредством дополнительного вычислительного модуля (6) устройств ввода-вывода (4) получают сообщение с запросом измерений и проверяют, имеется ли непосредственная технологическая связь с первичным оборудованием (7), указанным в сообщении;
затем при наличии измерений параметров работы оборудования, указанного в сообщении от контроллера управления (1), и наличии непосредственной технологической связи между первичным оборудованием (7) через дополнительный вычислительный модуль (6) устройства ввода-вывода (4) отправляют котроллеру управления (1) сообщение с указанием параметров передаваемых измерений по ЛВС (8), причем если устройство ввода-вывода (4) имеет непосредственную технологическую связь с первичным оборудованием (7), указанным в сообщении от контроллера управления (1), но не имеет необходимых измерений, то посредством дополнительного вычислительного модуля (6) этого устройства ввода-вывода (4) отправляют сообщения другим устройствам ввода-вывода (4), первичное оборудование (7) которых имеет непосредственную технологическую связь с оборудованием данного устройства ввода-вывода (4), а после получения устройством ввода-вывода (4) ответного сообщения от других устройств ввода-вывода (4) посредством дополнительного вычислительного модуля (6) устройства ввода-вывода (4) отправляют по ЛВС (8) параметры потоков измерений в контроллер управления (1); и
посредством контроллера управления (1) рассчитывают по заданным соотношениям недостающие значения измерений с учётом текущего состояния технологической схемы объекта управления.
2. Способ по п.1, в котором при отправке дополнительным вычислительным модулем (6) устройства ввода-вывода (4) сообщения котроллеру управления (1) с указанием параметров передаваемых измерений по ЛВС (8) учитывают положение коммутационных аппаратов или запорной арматуры (9), подключенных контактами измерения положения к данному устройству ввода-вывода (4).
3. Способ по п.1, в котором в качестве параметров измерений рассчитывают значение силы тока или напряжения, или напора, или расхода.
4. Способ по п.1, отличающийся тем, что в качестве контроллера управления (1) используют интеллектуальные электронные устройства (ИЭУ).
5. Способ по п.1, отличающийся тем, что в качестве устройств ввода-вывода (4) используют устройства связи с объектом (УСО).
| CN 202025227 U, 02.11.2011 | |||
| Способ перераспределения функций между устройствами автоматики при возникновении неисправностей в автоматизированной системе | 2020 |
|
RU2740683C1 |
| US 10983492 B1, 20.04.2021 | |||
| JP 2006251997 A, 21.09.2006 | |||
| JP 2015185066 A, 22.10.2015. | |||

