Изобретение относится к области медицинской роботизированной техники, а именно к программно-алгоритмическим комплексам для роботизированной реабилитации, автоматизирующим процесс наведения и удержания источника магнитного поля в проекции указанной врачом точки воздействия на головной мозг пациента, с использованием методов нейровизуализации, сочетающейся с применением методов электромиостимуляции и биологической обратной связи.
Проблема распространенности инсультов одна из самых острых в медицинской и социальной составляющей жизни общества - инсульты занимают второе место по распространенности в статистике смертности населения, как в общероссийском, так и в общемировом масштабе, ежегодно в мире доля церебрального инсульта и процент инвалидов значительно растет. Наиболее частым последствием инсульта являются двигательные нарушения различной степени выраженности, в том числе и нарушение моторики верхних конечностей, остающиеся одной из главных причин инвалидности у лиц трудоспособного возраста. Двигательные нарушения в результате инсульта ухудшают мобильность пациента, ограничивают его участие в повседневной активности и выполнение своей роли в обществе, снижают шансы возврата к профессиональной деятельности. Все это способствует снижению качества жизни пациента. Поэтому улучшение двигательных навыков пациентов, перенесших инсульт, является одной из приоритетных задач медицинской реабилитации.
Снижение трудового потенциала граждан, в конечном счете, приводит к снижению внутреннего валового продукта страны. При этом потери государства от одного больного, получившего инвалидность, составляют порядка 1,2 млн. руб. в год. По данным регистрационного списка мозгового инсульта НИИ неврологии РАМН, к концу острого периода (3 недели от начала инсульта) нарушение двигательной активности наблюдаются у 80% из 100 больных, которые выжили, 31% больных инсультом требует посторонней помощи, 20% не могут самостоятельно ходить. В настоящее время в России проживает свыше 1 млн. человек, перенесших инсульт. Из них третью часть составляют лица трудоспособного возраста, к труду же возвращается только каждый четвертый больной.
Спрос на услуги по реабилитации после инсульта растет во всем мире. Пациенты с гемипарезом нуждаются в восстановлении локомоции и бытовых функций конечностей, восстановлении индивидуальной независимости. Коррекция двигательных нарушений является глобальной проблемой, решение которой позволило бы вернуть полную трудоспособность части лиц, перенесших инсульт.
Для реабилитации больных, перенесших острое нарушение мозгового кровообращения, используют различные виды воздействия на пациента. По данным исследователей, наряду с лекарственной терапией наиболее эффективными видами физиотерапевтического лечения пациентов, перенесших острое нарушение мозгового кровообращения, явились лечебная физкультура, ручной массаж, электростимуляция, магнитотерапия, электрофорез, теплолечение. Однако, на основании выявленных источников информации можно сделать вывод, что в имеющихся способах реабилитации не разработаны методические подходы к выбору методов медицинской и социально-средовой реабилитации с учетом пораженного сосудистого бассейна, типа инсульта, в зависимости от реабилитационного диагноза и реабилитационного потенциала.
Реабилитация пациентов страдающих или перенесших неврологические заболевания, является наиболее длительным, сложным и затратным этапом лечения. Показано, что в активации механизмов нейропластичности центральной нервной системы важную роль играют методы усиления афферентного входа, которые составляют основу реабилитационной терапии больных с двигательными нарушениями. Это послужило толчком к развитию современной концепции двигательного обучения, заключающегося в использовании целенаправленного подхода, ориентированного на обучение определенной двигательной задаче, а также в обеспечении интенсификации процесса обучения путем многократного повторения.
К перспективным в плане воздействия на нейропластические процессы, обеспечивающие функциональную реорганизацию поврежденной центральной нервной системы и компенсацию двигательного дефицита, можно отнести транскраниальные, роботизированные методы, технологии виртуальной реальности. Особое внимание в публикациях уделяется технологическим вмешательствам для двигательной реабилитации, таким как робототехника, мышечная электростимуляция, стимуляция мозга.
Повторяющаяся транскраниальная магнитная стимуляция является перспективным методом реабилитации после инсульта. В литературе описаны положительные когнитивно-двигательные эффекты низкочастотной транскраниальной магнитотерапии переменным полем, возникающие вследствие нейронного стресслимитирующего, метаболического, иммунного и вазоактивного эффектов.
Новым шагом к персонифицированной медицине явилось применение навигационной транскраниальной магнитной стимуляции мозга. Имеются зарубежные роботизированные комплексы, в которых реализована функция наведения источника переменного магнитного поля на зоны интереса, расположенные в головном мозге человека на основании анализа данных нейровизуализации головного мозга [Axium Robotics [Электронный ресурс]: https://www.axilumrobotics.com/en/tms-robot/?noredirect=en-US], а также обеспечивающие позиционирование источника магнитного поля над головой пациента [https://nexstim.com/]. Отечественные технические решения не имеют элементов роботизации и представляют собой аппаратные и программно-аппаратные комплексы, позволяющие осуществить воздействие магнитного поля на заданные зоны коры головного мозга пациента при участии медицинского персонала [https://neurosoft.com/ru/catalog/tms/neuro-msd-therapeutic-advanced].
Широкое распространение в двигательной реабилитации больных после инсульта имеет электростимуляция, являющаяся методом реабилитации с доказанной эффективностью. Выявлено, что на фоне тренировок с функциональной электростимуляцией у пациентов, перенесших инсульт, происходит реорганизация моторной коры полушарий головного мозга. Новые перспективы повышения не только двигательной, но и соматосенсорной корковой пластичности ряд ученых связывают с нейромышечной электростимуляцией, контролируемой электромиографией [Tashiro S, Mizuno K, Kawakami М, Takahashi О. et al., 2019].
Известны исследования, показавшие, что у пациентов с инсультом под влиянием процедур с поверхностной электронейромиографией с биологической обратной связью наблюдалось более успешное восстановление произвольных движений верхних конечностей в сравнении с теми, кто получал только традиционную реабилитационную терапию. Кроме того, отечественными авторами предложена терапевтическая модель, показавшая высокую эффективность в реабилитации пациентов с нарушением двигательной активности не только сосудистого генеза. Установлено, что нейротренинги с применением биологической обратной связи (БОС) и виртуальной реальности существенно повышают эффективность реабилитационных процедур и на 15-25% сокращают время их проведения при том же достигнутом эффекте.
Насущной задачей настоящего периода является разработка реабилитационного роботизированного аппаратно-программного комплекса с БОС для коррекции двигательных нарушений у больных, перенесших инсульт, обеспечивающего персонализацию курса реабилитации за счет совместного использования системы нейровизуализации и автоматизации позиционирования источника магнитного поля при проведении процедуры транскраниальной магнитной стимуляции, а также систем электромиостимуляции и БОС для адаптивного многоуровневого воздействия на пациента.
При проведении исследований уровня техники были выявлены патенты.
Патент CN 211659077 (U), Multi-contact positioning device for transcranial magnetic stimulation bat, опубликован 13.10.2020. Техническое решение защищает конструкцию специализированного манипулятора, осуществляющего перемещение источника магнитного поля в заданную точку облучения на поверхности головы пациента. Основной отличительной особенностью манипулятора является наличие датчиков, отслеживающих факт соприкосновения источника магнитного поля с головой пациента.
Патент CN 110268444 (A)). Head Posture Tracking System Used For Transcranial Magnetic Stimulation Diagnosis And Treatment, опубликован: 03.09.2020. В техническом решении раскрывается принцип работы системы слежения за головой. В качестве трехмерной камеры используется стереокамера. Основное условие функционирования системы заключается в обязательном присутствии головы в области зрения камеры. Для поиска головы используется классификатор с оптимизатором ADABOOST. Для работы не обязательно использовать заранее сформированную трехмерную модель головы пациента. Возможность использования не исключается, хотя в связанном патенте CN 110300993 А подготовка перед работой системы транскраниальной магнитной стимуляции заключается в построении трехмерной модели головы трехмерным сканером.
Патент CN 110300993 A. Camera System For Transcranial Magnetic Stimulation Therapy, опубликован 03.09.2020. Патентным решением защищена структура системы технического зрения, входящей в состав системы для проведения навигационной транскраниальной магнитной стимуляции. Система технического зрения включает в свой состав трехмерный сканер и RGB-D камеру. Непосредственно перед началом проведения процедуры транскраниальной магнитной стимуляции при помощи трехмерного сканера происходит сканирование головы пациента с последующим построением ее трехмерной модели. После начала процедуры транскраниальной магнитной стимуляции с помощью камеры происходит регистрация изображений и расстояния до головы пациента, затем полученная информация совмещается с трехмерной моделью головы пациента и информацией по результатам МРТ. В результате происходит получение трехмерной координаты точки облучения коры головного мозга, в которую нужно переместить или в которой удерживается манипулятором источник магнитного поля.
Патент CN 111729200A. TMS (Transcranial Magnetic Stimulation) automatic navigation system and method based on depth camera and magnetic resonance, опубликован 02.10.2020. В документе приводится общее описание решения, идентичного решению, приведенному в головном патенте. В качестве отличия можно отметить использование результатов яМРТ, в отличие от головного решения, в котором для функционирования системы предполагается использование результатов МРТ.
Патент CN 211658634 U. Self-adaptive anti-collision buffer headrest of magnetic stimulation robot equipment, опубликован: 13.10.2020. В патентном решении раскрывается устройство специализированного подголовника, интегрированного в состав кушетки головного изобретения. Описываемое устройство обеспечивает комфортное расположение головы пациента с учетом ее анатомических особенностей. Это достигается за счет реализации в составе устройства специализированных мехатронных элементов, обеспечивающих перемещение его частей.
В качестве основного недостатка приведенной группы технических решений можно отметить отсутствие возможности получения информации об ответной реакции организма пациента при проведении процедуры, а также необходимость включения в ее состав двух типов сенсоров: трехмерного сканера и сенсора, получающего изображения пациента при проведении процедуры транскраниальной магнитной стимуляции. Кроме этого, ни в одном из патентных решений не было обнаружено описание способа реализации детектирования текущего положения источника магнитного поля.
В качестве основных недостатков рассмотренных технических решений можно отметить то, что каждое из них представляет собой устройство, разработанное для решения узкоспециализированных задач, не предусматривающее возможности включения в гибкие модульные решения и не позволяющие провести реконфигурацию и адаптацию под потребности реабилитации конкретного пациента. Большинство из них предполагает подготовку данных к их анализу специалистом, но не предусматривает выделение области интереса в формате, удобном для вычисления данных, необходимых для автоматизации позиционирования медицинского инструмента и планирования манипуляции. Также в существующих решениях для отслеживания положения пациента имеется необходимость использования дополнительных датчиков и сенсоров, расположенных как на самом манипуляторе, так и на пациенте.
Анализируя устройства с использованием БОС в реабилитационных процедурах, где данная обратная связь реализована как элемент контроля воздействия, можно отметить два общих момента. В том случае, когда активным элементом БОС является человек, возникает проблема организации сознательной эмоционально окрашенной связи между электронной вычислительной машиной (ЭВМ) и пациентом: обычно для этого используются слуховые или визуальные образы. При этом эмоциональное подкрепление действий человека либо не упоминается вообще, либо является второстепенным, хотя на подсознательным уровне оно играет важнейшую роль. Второй общий момент связан с замыканием БОС на уровне программно-аппаратной части автономных реабилитационных устройств, глубина и направленность которой в принципе не контролируется ни пациентом, ни лечащим врачом. Попытка решения этой проблемы приведена в патенте США US 20100094156 А1, где врач может произвести произвольную коммутацию между сигналами электроэнцефаллографии, снимаемых с определенных накожных электродов, и стимулирующими импульсами электромиостимуляции, хотя характер связи между этими сигналами остается неизменным и закрытым от вмешательства извне.
Общим требованием практически всех предложенных решений является необходимость создания базы данных эталонных сигналов, в качестве источника которых выступают здоровые добровольцы. При этом авторы предложений не учитывают как эмоциональное, так и общее психологическое состояние и добровольцев, и пациентов, хотя последние в подавляющем большинстве находятся в состоянии стресса различной интенсивности.
Следует отметить патенты КНР CN 212491147 U и CN 111514454 A, которые в автоматическом режиме отслеживают качество регистрируемых сигналов ЭМГ и импеданс тела пациента, который в ходе сеанса реабилитации может изменяться в значительных пределах. По нашему мнению, подобными функциями должны обладать все сложные реабилитационные устройства, использующие БОС.
Наиболее близким к предлагаемому является техническое решение, описанное в [Sun Cong, Wang Во, Cai Sheng'an, патент CN 110896611 (A) Tms positioning navigation method used for transcranial magnetic stimulation treatment // КНР, опубл. 20.03.2020], Изобретение раскрывает навигационную систему диагностики и лечения транскраниальной магнитной стимуляции на основе камеры, которая содержит кровать для лежания, подголовник, 3D-камеру, 3D-сканер, манипулятор, катушку ТМС и интеллектуальный терминал; способ навигации навигационной системы включает следующие этапы: во-первых, моделирование головы пациента с помощью 3D-сканера и интеллектуального терминала; сопоставление положения модели головы с фактическим положением головы пациента и определение пространственного положения точки магнитной стимуляции, подлежащей магнитной стимуляции, на модели головы пациента; моделирование манипулятора, катушки ТМС и 3D-камеры; и, наконец, размещение модели головы пациента и модели операционного устройства в одной и той же системе пространственных координат, расчет оптимального пути модели катушки ТМС к точке магнитной стимуляции, подлежащей магнитной стимуляции на модели головы, автоматическая навигация по движению, перемещения манипулятора по оптимальному пути и перемещения катушки ТМС к голове пациента для проведения лечения. Согласно изобретению движение манипулятора регулируется автоматически, что позволяет избежать влияния человеческого фактора на эффект лечения и улучшить ощущения пациента
Анализ результатов поиска показал, что на данный момент времени есть известные роботизированные реабилитационные комплексы, однако не отработаны технические решения для позиционирования медицинского инструментария с их помощью и в их состав не интегрируются модули для электромиостимуляции и БОС.
Новый технический результат - повышение эффективности реабилитации за счет возможности удержания фокуса магнитостимуляции при движениях пациента, и возможности контролировать эффективность обоих физиотерапевтических воздействий в реальном времени через введение БОС.
Для достижения нового технического результата роботизированный реабилитационный аппаратно-программный комплекс для проведения навигационной транскраниальной магнитной и электромиостимуляции, состоящий из управляющего устройства на базе ЭВМ, роботизированного манипулятора и системы стереоскопического технического зрения, содержит модуль биологической обратной связи, включающий регистратор электрической активности организма, подключенный к нему аналого-цифровой преобразователь, соединенный с ним блок обмена данными с ЭВМ с каналом USB, цифро-аналоговый преобразователь, соединенный с блоком обмена данными с ЭВМ, и электромиостимулятор, соединенный с цифро-аналоговым преобразователем и управляемый устройством на базе ЭВМ через блок обмена данными с ЭВМ, причем модуль механического манипулятора содержит сервоусилители, электродвигатели, механический преобразователь, датчики обратной связи, исполнительный орган контроллер управления, выполненный с возможностью приема команд от программного обеспечения роботизированного комплекса, установленного на управляющей ЭВМ, модуль технического зрения содержит стереоскопическую камеру высокого разрешения, подключенную к контроллеру, выполненному с возможностью согласования сигналов видеоряда с сигналами ЭВМ, и программный драйвер видеокамеры, выполненный с возможностью обмена данными с программным обеспечением роботизированного комплекса, установленного на управляющей ЭВМ, причем манипулятор выполнен с возможностью подведения индуктора транскраниальной магнитной стимуляции в заданные координаты и ориентирования его в пространстве так, чтобы вектор напряженности его магнитного поля совпадал с расчетным вектором воздействия, а локализованный очаг находился в фокусе максимальной напряженности магнитного поля поражения.
Предлагаемая к разработке система транскраниальной магнитной стимуляции отличается от рассмотренного решения тем, что включает модуль БОС, позволяющий проводить корректировку параметров проведения процедуры транскраниальной магнитной стимуляции, а также оценить эффективность проведения реабилитационных мероприятий. Кроме этого, СТЗ не включает в свой состав трехмерного сканера. Построение трехмерной модели головы пациента также индивидуализировано за счет совместного использования данных от RGB-D сенсора и алгоритмов машинного обучения.
Техническим результатом является повышение эффективности реабилитации. Он достигается за счет возможности удержания фокуса магнитостимуляции при движениях пациента, и возможности контролировать эффективность обоих физиотерапевтических воздействий в реальном времени через введение БОС.
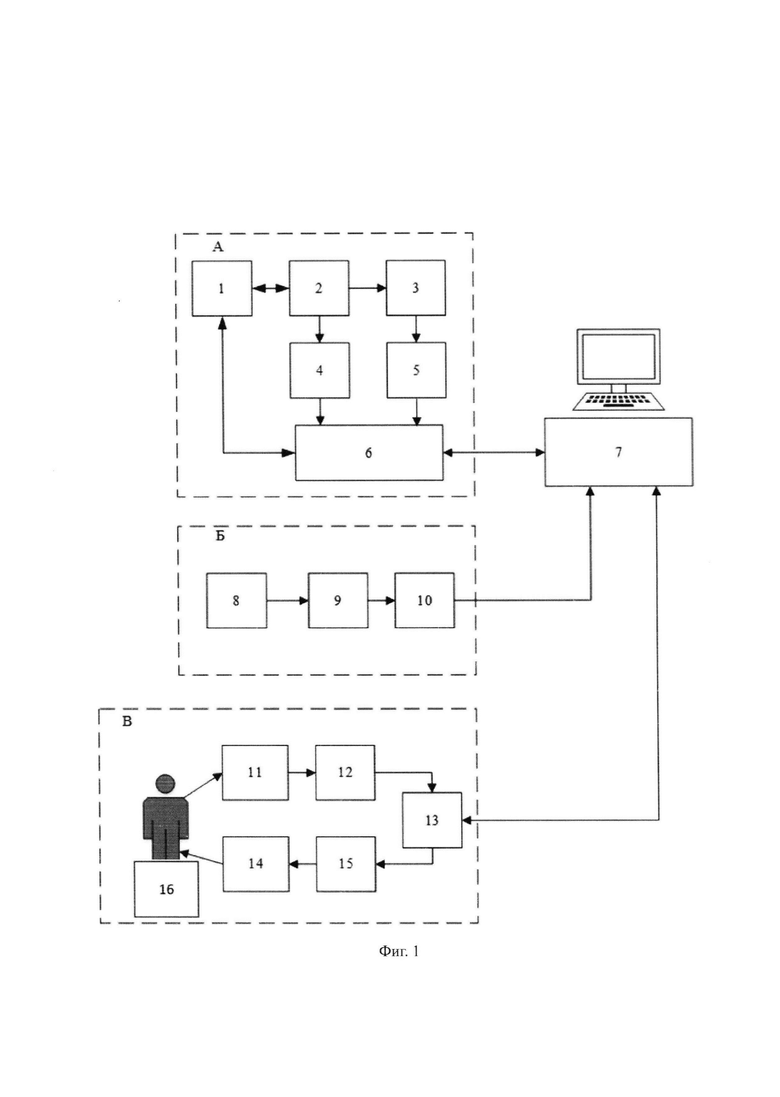
Роботизированный комплекс для проведения навигационной транскраниальной магнитной и электромиостимуляции, состоит из взаимосвязанных модулей, показанных на блок-схеме Фиг. 1 Роботизированный комплекс для проведения навигационной транскраниальной магнитной и электромиостимуляции, содержащий три модуля (А, Б и В)., и механического манипулятора, показанного на Фиг. 2 Внешний вид модуля механического манипулятора роботизированного комплекса для проведения навигационной транскраниальной магнитной и электромиостимуляции
Модуль механического манипулятора А имеет как минимум 6 степеней свободы и объединяет в себе сервоусилители 1, электродвигатели 2, механический преобразователь 3, датчики обратной связи 4, исполнительный орган 5 и контроллер управления 6, который воспринимает команды от программного обеспечения (ПО) роботизированного комплекса 7, установленного на управляющей ЭВМ. Взаимное положение сегментов манипулятора в пространстве определяется командами контроллера 6, воспринимающего управляющие команды ПО роботизированного комплекса и отсылающего в ответ результаты исполнения этих команд, получаемые через датчики обратной связи. Общее управление работой манипулятора осуществляет управляющее устройство (УУ) на базе ЭВМ 7.
Модуль технического зрения Б объединяет в себе стереоскопическую камеру высокого разрешения 8, подключенную к контроллеру 9, согласующего сигналы видеоряда с сигналами ЭВМ и программный драйвер видеокамеры 10, обеспечивающий обмен данными с ПО УУ на базе ЭВМ 7. Модуль технического зрения Б формирует изображение лицевой части головы пациента, которое после соответствующей обработки в контроллере 9 и программном драйвере 10 поступает для дальнейшей обработки и совмещения с 3D моделью головного мозга в ПО роботизированного комплекса на управляющей ЭВМ.
Модуль БОС В реализует цепь БОС за счет регистратора электрической активности организма (например, электромиографа, электроэнцефалографа, реографа и др.) 11, подключенного к аналого-цифровому преобразователю (АЦП) 12, соединенного с блоком обмена данными с ЭВМ по каналу USB 13, по которому от УУ 7 поступают управляющие сигналы на цифро-аналоговый преобразователь 15, управляющий работой электромиостимулятора 14, пациент 16.
Устройство работает следующим образом.
Сигналы от всех модулей поступают на УУ 7, где обрабатываются комплексом ПО, состоящим из программ для ЭВМ, соответствующих библиотек и других программных модулей. Перед началом первого сеанса ТМС в УУ 7 создается 3D модель головного мозга с очагом поражения, для чего используется серия томограмм, полученных в результате исследования МРТ. Далее локализуется очаг поражения в объеме полученной 3D модели с определением его границ и определяются точка облучения на поверхности черепа пациента, а также вектор воздействия. На коже пациента закрепляют электроды регистратора электрической активности паретичных мышц и электростимулятора. С помощью системы технического зрения определяют расположение головы пациента в пространстве и нахождение точки облучения. Программный комплекс УУ производит совмещение полученной 3D модели и реально расположенной головы пациента, используя для этого характерные точки на лицевой части. Результат совмещения с обозначением очага поражения, точки облучения и вектора воздействия выводятся на экран монитора. Исходя из оптимального расстояния между очагом поражения и индуктором ТМС, рассчитывают координаты установки сердечника с обмоткой и его пространственное положение для фокусировки магнитного поля в нужной точке. После этого манипулятор по командам от УУ подводит индуктор ТМС в заданные координаты и ориентирует его в пространстве так, чтобы вектор напряженности его магнитного поля совпадал с расчетным вектором воздействия, а локализованный очаг поражения находился в фокусе максимальной напряженности магнитного поля. Импульсами магнитного поля небольшой интенсивности проверятся работоспособность всей системы, при этом врач ориентируется на критерии миоэлектрической активности в паретичной конечности. В случае удовлетворительного результата начинается проведение сеанса ТМС, при необходимости сопровождаемого его электростимуляцией.
Для задания должных параметров режима работы электромиостимулятора и/или ТМС в случае использования БОС, можно использовать один из известных алгоритмов, основанных, например, на параметрах альфа-ритма электроэнцефалограммы, параметров кровообращения в очаге поражения головного мозга, сопоставления электрической активности двигательной зоны коры головного мозга и электромиографического отклика соответствующих мышц паретичной конечности и других. Контроль за силой воздействия на пациента физиотерапевтических факторов осуществляет УУ, следуя одному из ранее заданных алгоритмов, которые выбираются врачом перед проведением сеанса.
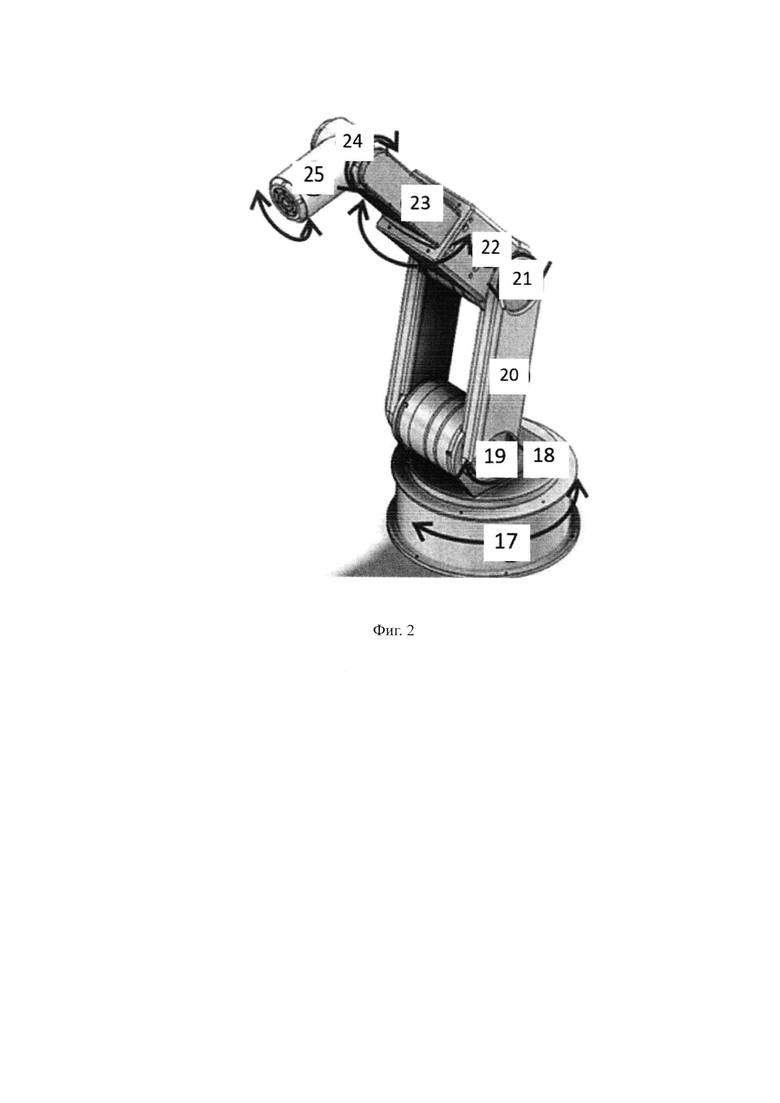
Внешний вид модуля механического манипулятора представлен на Фиг. 2.
Пациент 16, модуль механического манипулятора установлен на массивном основании 17, в верхней части которого установлен поворотный стол 18, позволяющий поворачивать всю конструкцию на 360°, в центре которого крепится нижний поворотный узел 19, отклоняющий нижний сегмент манипулятора 20 на ±45° по вертикали. В верхней части нижнего сегмента 20 установлен еще один поворотный узел 21, отклоняющий средний сегмент манипулятора 22 уже на ±90° по вертикали, при этом верхняя часть среднего сегмента 23 относительно автономна и способна совершать линейные возвратно-поступательные движения. В верхней части сегмента 23 установлен третий поворотный узел 24, позволяющий схвату с установленным в нем эффектором 25 совершать дополнительные вращательные движения. Все повороты узлов 18, 19, 21 и 24, а также перемещения верхней части среднего сегмента 23 контролируются датчиками поворотов и пространственного положения. Контроль и координация движения эффектора осуществляется через управляющую систему, расположенную в основании 17. Работа конструкции обеспечивается с помощью электроприводов, которые преобразуют электрическую энергию в механические движения манипулятора.
Таким образом, достижимость технического результата реальна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЯВЛЕНИЯ В КОРЕ ГОЛОВНОГО МОЗГА СЕНСОМОТОРНЫХ ЗОН, ОТВЕТСТВЕННЫХ ЗА ЛОКОМОЦИЮ | 2012 |
|
RU2504329C1 |
| Способ стимуляции головного мозга | 2023 |
|
RU2822811C1 |
| Способ медицинской реабилитации пациентов трудоспособного возраста в раннем и позднем восстановительных периодах ишемического инсульта | 2019 |
|
RU2714213C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2023 |
|
RU2817476C1 |
| Устройство для тренировки рук при выполнении навигационной транскраниальной магнитной стимуляции | 2023 |
|
RU2817982C1 |
| Система нейрореабилитации и способ нейрореабилитации | 2020 |
|
RU2741215C1 |
| СПОСОБ ОЦЕНКИ ИНДИВИДУАЛЬНОЙ ЧУВСТВИТЕЛЬНОСТИ К ВОЗДЕЙСТВИЮ ХИМИЧЕСКИХ, ФИЗИЧЕСКИХ И ПСИХОЛОГИЧЕСКИХ ФАКТОРОВ НА ГОЛОВНОЙ МОЗГ ПАЦИЕНТА | 2012 |
|
RU2497447C2 |
| Способ повышения уровня сознания пациентов с длительными нарушениями сознания | 2022 |
|
RU2783006C1 |
| Способ комплексной коррекции мышечной спастичности у пациентов в раннем восстановительном периоде после инсульта | 2024 |
|
RU2827666C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
Изобретение относится к медицинской технике. Роботизированный реабилитационный аппаратно-программный комплекс для проведения навигационной транскраниальной магнитной и электромиостимуляции содержит управляющее устройство на базе ЭВМ, роботизированный манипулятор, систему стереоскопического технического зрения и модуль биологической обратной связи (БОС). Модуль БОС включает регистратор электрической активности организма и электромиостимулятор. Модуль манипулятора содержит сервоусилители, электродвигатели, механический преобразователь, датчики обратной связи, исполнительный орган, контроллер управления, выполненный с возможностью приема команд от программного обеспечения роботизированного комплекса. Модуль технического зрения содержит стереоскопическую камеру высокого разрешения и программный драйвер видеокамеры для обмена данными с программным обеспечением роботизированного комплекса. Манипулятор выполнен с возможностью подведения индуктора транскраниальной магнитной стимуляции в заданные координаты и ориентирования его в пространстве так, чтобы вектор напряженности его магнитного поля совпадал с расчетным вектором воздействия, а локализованный очаг находился в фокусе максимальной напряженности магнитного поля поражения. Достигается повышение эффективности реабилитации за счет удержания фокуса магнитостимуляции при движениях пациента и контроля эффективности обоих физиотерапевтических воздействий в реальном времени через введение БОС. 2 ил.
Роботизированный реабилитационный аппаратно-программный комплекс для проведения навигационной транскраниальной магнитной и электромиостимуляции, состоящий из управляющего устройства на базе ЭВМ, роботизированного манипулятора и системы стереоскопического технического зрения, отличающийся наличием модуля биологической обратной связи, включающего регистратор электрической активности организма, подключенный к нему аналого-цифровой преобразователь, соединенный с ним блок обмена данными с ЭВМ с каналом USB, цифроаналоговый преобразователь, соединенный с блоком обмена данными с ЭВМ, и электромиостимулятор, соединенный с цифроаналоговым преобразователем и управляемый устройством на базе ЭВМ через блок обмена данными с ЭВМ, причем модуль механического манипулятора содержит сервоусилители, электродвигатели, механический преобразователь, датчики обратной связи, исполнительный орган, контроллер управления, выполненный с возможностью приема команд от программного обеспечения роботизированного комплекса, установленного на управляющей ЭВМ, модуль технического зрения содержит стереоскопическую камеру высокого разрешения, подключенную к контроллеру, выполненному с возможностью согласования сигналов видеоряда с сигналами ЭВМ, и программный драйвер видеокамеры, выполненный с возможностью обмена данными с программным обеспечением роботизированного комплекса, установленного на управляющей ЭВМ, причем манипулятор выполнен с возможностью подведения индуктора транскраниальной магнитной стимуляции в заданные координаты и ориентирования его в пространстве так, чтобы вектор напряженности его магнитного поля совпадал с расчетным вектором воздействия, а локализованный очаг находился в фокусе максимальной напряженности магнитного поля поражения.
| CN 110896611 A, 20.03.2020 | |||
| CN 117398602 A, 16.01.2024 | |||
| US 10898717 B2, 26.01.2021 | |||
| CA 2964686 A1, 21.04.2016 | |||
| CN 105920735 A, 07.09.2016 | |||
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОЙ ТЕРАПИИ | 2006 |
|
RU2317116C2 |

