Область техники, к которой относится изобретение
Изобретение относится к области медицины, а именно к неинвазивным методам нейростимуляции и нейромодуляции головного мозга, и предназначено для электромагнитной индукции электрического поля в заданном участке головного мозга [A61N 2/00, A61N 2/08, A61B 34/20].
Уровень техники
Из уровня техники известен TMS-ROBOT [http://infomed.com.ru/meditsinskoe-oborudovanie/product/view/11/195; https://www.youtube.com/watch?v=t2nzNr7s_kQ], представляющий собой роботизированную систему под управлением компьютера, обеспечивающую автоматическую навигацию для проведения прицельной транскраниальной магнитной стимуляции (ТМС). Система состоит из роботизированного манипулятора, имеющего 7 степеней свободы, и кресла с 2 степенями свободы. Имея возможность комбинации с нейронавигационной системой и установки магнитного стимулятора, TMS-Robot позволяет проводить заранее запланированную процедуру ТМС при визуальном контроле изображения головного мозга. После установки необходимых зон для стимуляции, манипулятор автоматически позиционирует магнитный стимулятор, обеспечивая дозированный контакт с поверхностью головы обследуемого. При этом компенсируются любые движения головы во время процедуры, а положение магнитного стимулятора сохраняет заданную ориентацию по отношению к мозгу. Недостатками известной системы являются отсутствие возможности ручной подстройки манипулятора, ограничивающее гибкость системы, особенно в ситуациях, требующих быстрого и точного вмешательства человека; отсутствие возможности визуального и чувственного контроля параметров проводимой процедуры; невозможность программирования автоматического прерывания процедуры вне зависимости от состояния верхнеуровневого софта при необходимости. Указанные недостатки приводят к низкому уровню контроля и безопасности при работе роботизированной системы ТМС.
Из уровня техники также известен TMS-COBOT [http://infomed.com.ru/meditsinskoe-oborudovanie/product/view/11/225], представляющий собой более компактное решение для прицельной транскраниальной магнитной стимуляции, позволяющее проводить манипуляции как с участием совместимых нейронавигационных систем на основе данных МРТ, так и с помощью оптической системы слежения, и имеющее помимо автоматического- ручной режим управления. Недостатком данного устройства является также является отсутствие возможности ручной подстройки манипулятора в случае необходимости, отсутствие визуального контроля параметров, включая параметры усилия, прикладываемого манипулятором к голове пациента, невозможность задания параметров прерывания процедуры вне зависимости от верхнеуровнего софта.
Наиболее близким решением к предложенному (ближайшим аналогом) является СИСТЕМА РОБОТИЗИРОВАННОГО ХИРУРГИЧЕСКОГО КОНТРОЛЯ И НАВИГАЦИИ [WO 2023038906 (A1), опубл. 16.03.2023], включающая роботизированную систему, положение которой регулируется и контролируется с использованием системы навигации благодаря считыванию маркеров или с использованием дополнительно данных медицинских исследований, а датчики, установленные на манипуляторе системы позволяют удерживать дозированный заранее запрограммированный контакт с поверхностью тела пациента. В системе предусмотрено 3 режима управления - автоматический, полуавтоматический и ручной. При этом ручной режим предусматривает удержание веса устройства манипулятором, а контроль положения и перемещения устройства, в частности, магнитного стимулятора, специалистом, однако при этом у специалиста отсутствует возможность получения обратной связи от стимулятора и манипулятора, что не позволяет специалисту контролировать усилие, прикладываемое инструментом к той поверхности, на которую осуществляется воздействие. Вместе с отсутствием возможности визуального контроля фактических значений параметров прикладываемых усилий это приводит к снижению безопасности воздействия, по существу, превращая устройство роботизированного контроля в устройство роботизированного удержания и навигации. Кроме того, в известном устройстве также отсутствует возможность прерывания работы устройства вне зависимости от верхнеуровнего софта, что также увеличивает количество факторов, снижающих безопасность.
Раскрытие сущности изобретения
Технической проблемой, решаемой изобретением, является устранение недостатков прототипа.
Техническим результатом изобретения является повышение безопасности проводимой процедуры транскраниальной магнитной стимуляции для пациента с использованием роботассистированного комплекса.
Указанное повышение безопасности объективно проявляется в уменьшении количества факторов, способных нести риски повреждения/возникновения нарушений у пациента.
Указанный технический результат обеспечивает комплекс для проведения транскраниальной магнитной стимуляции, включающий: аппаратную стойку, на корпусе которой размещены коллаборативный роботассистированный манипулятор, содержащий звенья и имеющий шесть степеней подвижности, оснащенный схватом манипулятора, выполненным на дистальном конце дистального звена манипулятора с возможностью удержания устройства фиксации магнитного стимулятора; магнитным стимулятором, содержащим рабочую часть, включающую один или несколько койлов, и ручку стимулятора, съемно прикрепленную с помощью устройства фиксации магнитного стимулятора к схвату манипулятора таким образом, что продольная ось, проходящая через дистальное звено манипулятора, совпадает с центром рабочей части стимулятора, при этом на магнитном стимуляторе установлен по меньшей мере один инфракрасный маркер; шестиосевым датчиком силомоментного очувствления, подключенным к схвату манипулятора и выполненным с возможностью измерения усилия в точке контакта головы пациента и магнитного стимулятора, джойстиком ручной подстройки положения манипулятора, расположенным на проксимальном конце дистального звена манипулятора, оснащенным оптико-электронной измерительной системой, преобразующей движения джойстика по шести осям в электрические сигналы, обеспечивающие движение звеньев манипулятора; трехосевым акселерометром, расположенным на дистальном звене манипулятора, и выполненным с возможностью измерения ускорение дистального звена манипулятора по трем осям, сенсорный монитор, выполненный с возможностью ввода, редактирования и визуального отображения данных о планировании и проведении процедуры транскраниальной магнитной стимуляции, включая отображение значения усилия в точке контакта головы пациента и магнитного стимулятора, и их передачи в систему управления; систему оптического трекинга, содержащую очковую оправу, выполненную с возможностью размещения на голове пациента и содержащую по меньшей мере один инфракрасный маркер, и стойку с размещенными на ней инфракрасными камерами, выполненными с возможностью регистрации положения инфракрасных маркеров, и передачи данных в виде координат по трем осям и трем углам в режиме реального времени в систему управления; систему управления, включающую управляющий компьютер, выполненный с возможностью приема данных от сенсорного монитора о планировании и проведении процедуры транскраниальной магнитной стимуляции и выдачи управляющих команд исполнительным механизмам манипулятора, приема данных томографических исследований пациента, построения и отображением на их основании 3D-модели головного мозга пациента, приема данных о положении инфракрасных маркеров от системы оптического трекинга с расчетом относительных координат магнитного стимулятора и головы пациента, привязки координат головы пациента относительно координат магнитного стимулятора, сопоставления точек реального объекта с модельными с их визуализацией на экране, перерасчета модельных точек и выдачи управляющих команд исполнительным механизмам манипулятора, расчета положений рабочей точки относительно головы пациента, планирования траекторий перехода между целевыми положениями магнитного стимулятора, отслеживания выполнения спланированных траекторий; приема данных от джойстика ручной подстройки положения манипулятора, перерасчета смещений крышки джойстика в желаемую скорость и направление движения схвата манипулятора, преобразования желаемой скорости и направления движения схвата манипулятора в управляющие команды исполнительным механизмам манипулятора и выдачи управляющих команд, приема данных от системы измерения усилий, проверки усилия, прилагаемого к рабочей точке, на нахождение в пределах допустимого диапазона, расчета желаемого положения прилегания манипулятора, отправки управляющих команд исполнительным механизмам манипулятора на движение в желаемую позицию, приема значения ускорений от трехосевого акселерометра, сравнения их с предварительно заданным граничным значением и отключения питания манипулятора в случае его превышения.
В частности, комплекс, в котором управление магнитным стимулятором интегрировано в систему управления комплексом.
В частности, комплекс, в котором аппаратная стойка выполнена с возможностью перемещения.
В частности комплекс, в котором аппаратная стока содержит роликовые колеса и ручки.
В частности, комплекс, в котором инфракрасные камеры выполнены с возможностью регистрации положения инфракрасных маркеров с точностью до 0,25мм для пирамидального объема и 0,3 мм для вытянутого пирамидального объема.
В частности, комплекс, в котором трехосевой акселерометр представляет собой MEMS-акселерометр.
Указанный технический результат достигается благодаря совместному использованию в заявленном комплексе джойстика ручной подстройки положения манипулятора, позволяющего специалисту, осуществляющему процедуру, независимо от выбранного режима осуществлять точную плавную подстройку положения манипулятора, что в сочетании с возможностью отображения на сенсорном экране сведений о силе прилегания устройства позволяет осуществлять дозированное по силе и достаточное по степени прилегание манипулятора в нужной области, а кроме того в ручном режиме обеспечивает контролируемое специалистом безопасное перемещение манипулятора.
При этом особенности фиксации магнитостимулятора к манипулятору, а именно фиксация таким образом, чтобы продольная ось, проходящая через дистальное звено манипулятора, совпадала с центром рабочей части стимулятора, обеспечивает распространение пика индукции магнитной стимуляции именно в области касания головы пациента с достаточным (известным из показаний сенсорного монитора) усилием, предотвращая возможность оказания воздействия на рядом расположенные области или возможность оказания воздействия на более широкие области, чем необходимо, вследствие недостаточно сильного прилегания устройства к голове пациента.
Кроме того, дополнительный вклад в достижение безопасности процедуры вносит включение в состав комплекса средств, осуществляющих мониторинг скорости перемещения манипулятора, при превышении граничных значений которых происходит отключение питания манипулятора.
Краткое описание чертежей
На фиг. 1 представлен эскиз роботассистированного комплекса для транскраниальной магнитостимуляции головного мозга.
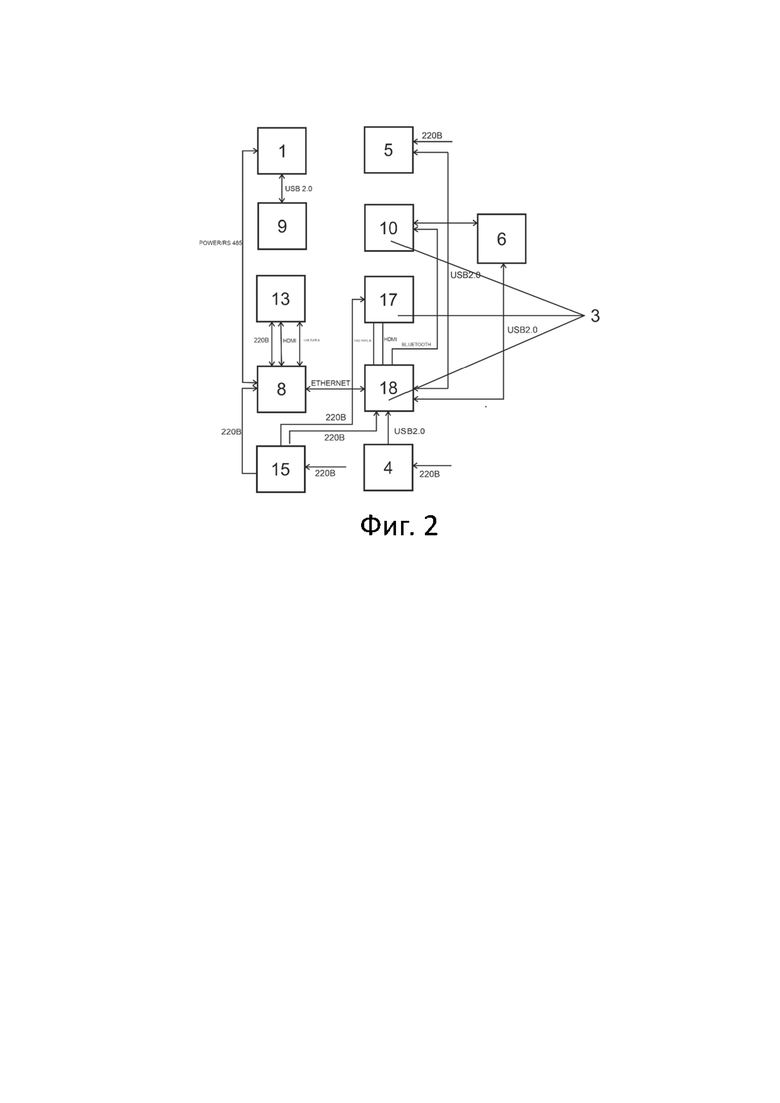
На фиг. 2 представлена обобщенная схема функционального взаимодействия элементов комплекса.
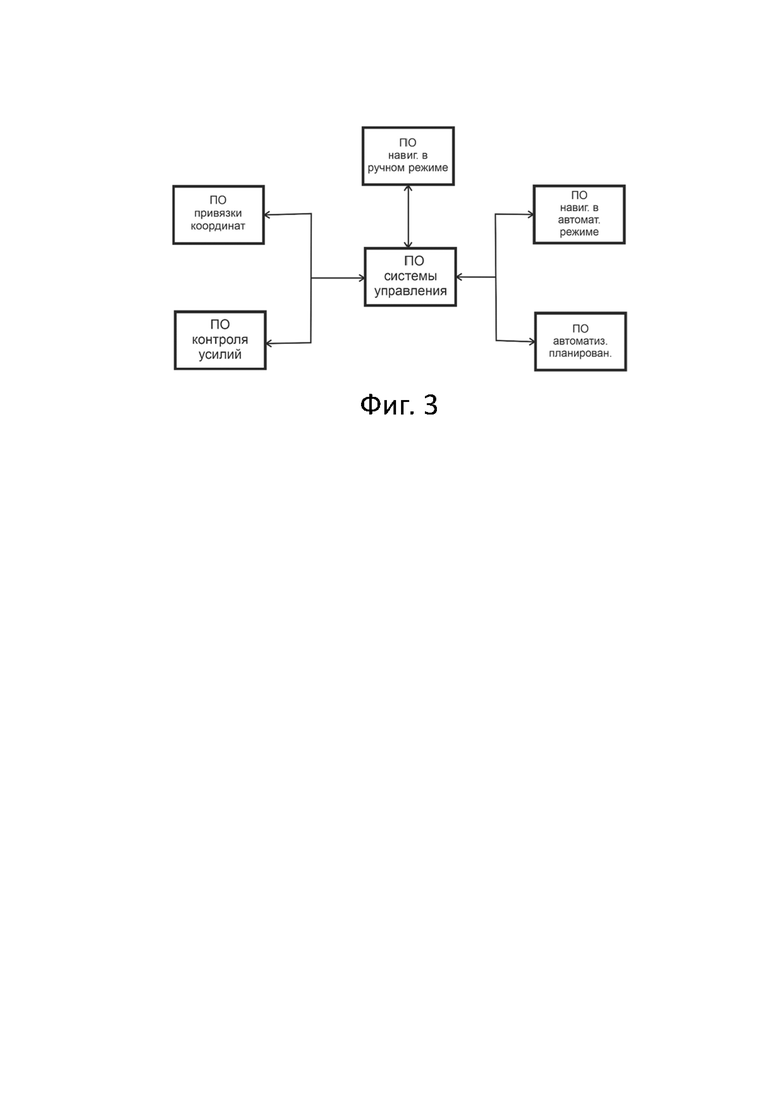
На фиг. 3 приведена общая структура программного обеспечения системы управления.
На фигурах обозначено: 1 - коллаборативный роботизированный манипулятор; 2 - аппаратная стойка; 3 - система управления; 4 - система оптического трекинга; 5 - магнитный стимулятор; 6 - модуль безопасности работы роботассистированного комплекса; 7 - система управления магнитным стимулятором; 8 - блок управления манипулятором; 9 - система измерения усилия; 10 - джойстик ручной подстройки положения манипулятора; 11 - устройство крепления манипулятора к аппаратной стойке; 12 - устройство фиксации магнитного стимулятора к схвату манипулятора; 13 - сервисный планшет манипулятора; 14 - корпус аппаратной стойки; 15 - электромонтажная панель; 16 - кронштейн для сенсорного монитора: 17 - сенсорный монитор; 18 - управляющий компьютер; 19 - колеса-ролики; 20 - ручки; 21 - стойка система оптического трекинга.
Осуществление изобретения
В настоящей заявке под термином «проксимальный» подразумевается рабочий орган устройства или его часть, расположенные ближе к центру устройства.
Под термином «дистальный» подразумевается рабочий орган устройства или его часть, расположенные дальше от центра устройства.
Под термином «койл» подразумевается катушка магнитостимулятора.
Программно-аппаратный комплекс для проведения транскраниальной магнитостимуляции головного мозга содержит коллаборативный роботизированный манипулятор 1, аппаратную стойку 2, систему управления 3, систему оптического трекинга 4, магнитный стимулятор 5 (фиг. 1-2), модуль безопасности 6 работы роботассистированного комплекса.
Дополнительно комплекс может содержать систему управления 7 магнитным стимулятором 5, интегрированную в систему управления 3.
Коллаборативный роботизированный манипулятор 1 представляет собой манипулятор, выполненный из звеньев, и имеющий шесть степеней подвижности, оснащенный блоком управления 8 манипулятора 1; системой измерения усилия 9 в точке контакта магнитного стимулятора 5 с головой пациента; джойстиком 10 ручной подстройки положения манипулятора, расположенным на проксимальном конце дистального звена манипулятора, оснащенным оптико-электронной измерительной системой, преобразующей движения джойстика по шести осям в электрические сигналы, обеспечивающие движение звеньев манипулятора; устройством крепления 11 манипулятора 1 к аппаратной стойке 2, устройством фиксации 12 магнитного стимулятора 5 к схвату манипулятора, обеспечивающим крепление магнитного стимулятора к схвату манипулятору таким образом, что продольная ось, проходящая через дистальное звено манипулятора, совпадает с центром рабочей части стимулятора 5; сервисным планшетом 13 манипулятора для выполнения базовых настроек манипулятора (фиг. 3).
Блок управления 8 манипулятором 1 выполнен с возможностью преобразования и выдачи управляющих сигналов на приводные механизмы звеньев манипулятора 1.
Система измерения усилия 9 представляет собой датчик силомоментного очувствления 6DoF, предназначенный для измерения усилий в точке контакта головы пациента и магнитного стимулятора для обеспечения безопасного взаимодействия коллаборативного роботизированного манипулятора, пациента и врача. Система измерения усилий в режиме реального времени осуществляет измерение усилий, которые возникают в точке контакта головы пациента и магнитного стимулятора. Измерение усилий позволяет, с одной стороны, избежать избыточного давления в точке контакта, способного привести к дискомфорту или травмам, а с другой стороны контролировать наличие необходимой степени контакта между роботассистированным устройством и головой пациента. Недостаточный контакт может привести к распространению воздействия за пределы выбранной зоны или к недостаточному воздействию на выбранную зону, что и в том и в другом случае приводит к снижению безопасности проводимой процедуры, а также ее эффективности. Кроме того, в случае непроизвольных смещений головы пациента и разрыва точки контакта, система измерения усилий подает информационный сигнал на систему управления о том, что контакт утерян. Параметры, измеренные системой, отображаются на сенсорном мониторе (см. ниже)
Система измерения усилия 9 выполнена в виде шестиосевого датчика усилия/ крутящего момента струнного типа, который выполнен с возможностью обнаружения трех усилий и трех крутящих моментов одновременно. Датчик использует тензорезистор для измерения изменения чувствительного упругого элемента. Датчик содержит встроенную систему, которая может собирать и обрабатывать сигнал об изменении напряжения сопротивления.
Джойстик 10 ручной подстройки положения манипулятора, расположенный на проксимальном конце дистального звена манипулятора 1 на его тыльной стороне, оснащен оптико-электронной измерительной системой, преобразующей движения джойстика по шести осям в электрические сигналы, обеспечивающие движение звеньев манипулятора 1; и выполнен с возможностью управления движениями манипулятора в ручном режиме. Устройство позволяет легко, точно и плавно перемещать механические компоненты, в данном случае роботизированный коллаборативный манипулятор 1, уменьшая риски порывистых, неточных, плохо координированных движений, способных нанести травму пациенту. Джойстик 10 имеет беспроводной интерфейс взаимодействия с управляющим компьютером.
Устройство крепления 11 манипулятора 1 к аппаратной стойке описано ниже.
Устройство фиксации 12 магнитного стимулятора 5 выполнено с возможностью обеспечения крепления магнитного стимулятора к схвату манипулятору таким образом, что продольная ось, проходящая через дистальное звено манипулятора, совпадает с центром рабочей части стимулятора 5. В предпочтительном варианте реализации устройство фиксации 12 состоит из следующих деталей: механизма фиксации магнитного стимулятора из двух щек (основная и ответная), выполненного из полиамида технологией 3D-печати путем лазерного спекания, лепестковой ручки для фиксации ручки магнитного стимулятора между щеками механизма фиксации, фланца и П-образного профиля устройства крепления магнитного стимулятора 5 к схвату роботизированного коллаборативного манипулятора 1.
Аппаратная стойка 2 состоит из каркаса стойки (на фиг. не показан), корпуса 14 аппаратной стойки 2 и электромонтажной панели 15.
Каркас стойки выполнен из листовой стали толщиной 3 мм и представляет собой сварную конструкцию. На верхней части каркаса имеется постамент с фланцем, являющийся частью устройства для крепления 11 манипулятора 1 к аппаратной стойке 2 и элементы для крепления ручек. По всей площади каркаса имеются технологические отверстия для удобства прокладки кабелей. В передней и задней частях предусмотрены вентиляционные окна для обеспечения воздушного охлаждения оборудования, которое размещается внутри.
Корпус 14 аппаратной стойки 2 выполнен с возможностью размещения роботизированного манипулятора 1, кронштейна 16 для сенсорного монитора, сенсорного монитора 17 и электромонтажной панели 15. Внутри корпуса размещен управляющий компьютер 18, блок питания управляющего компьютера, система воздушного охлаждения.
В предпочтительном варианте осуществления изобретения каркас стойки, закрытый корпусом 14 аппаратной стойки 2 выполнен с возможностью перемещения, например установлен на колеса-ролики 19. Колеса-ролики 19 предпочтительно выполнены в виде четырех пластмассовых сдвоенных роликов с контактным слоем из термопластичного полиуретана и основанием из усиленного полиамида. Колеса обеспечивают низкое сопротивление качению и развороту, устойчивость к абразивному износу. Каждое колесо предпочтительно имеет механический тормоз, что позволяет надежно стопорить устройство в нужном месте.
Корпус 14 аппаратной стойки 2 также может содержать ручки 20 для обеспечения удобства перемещения. Предпочтительно ручки выполнены из металла и имеют дугообразные форму.
Электромонтажная панель 15 выполнена с возможностью электрического монтажа управляющего компьютера, блока управления 8 манипулятора 1, сенсорного монитора 17 и разделяет внутреннее пространство каркаса стойки на две части в виде вертикальной стенки.
Система управления 3 содержит управляющий компьютер 18, джойстик 10, сенсорный монитор 17, программное обеспечение управления.
Управляющий компьютер 18 выполнен с возможностью: приема данных от сенсорного монитора о планировании и проведении процедуры транскраниальной магнитной стимуляции и выдачи управляющих команд исполнительным механизмам манипулятора, приема данных томографических исследований пациента, построения и отображением на их основании 3D - модели головного мозга пациента, приема данных о положении инфракрасных маркеров от системы оптического трекинга с расчетом относительных координат магнитного стимулятора и головы пациента, привязки координат головы пациента относительно координат магнитного стимулятора, сопоставления точек реального объекта с модельными с их визуализацией на экране, перерасчета модельных точек и выдачи управляющих команд исполнительным механизмам манипулятора, расчета положений рабочей точки относительно головы пациента, планирования траекторий перехода между целевыми положениями магнитного стимулятора, отслеживания выполнения спланированных траекторий; приема данных от джойстика ручной подстройки положения манипулятора, перерасчета смещений крышки джойстика в желаемую скорость и направление движения схвата манипулятора, преобразования желаемой скорости и направления движения схвата манипулятора в управляющие команды исполнительным механизмам манипулятора и выдачи управляющих команд, приема данных от системы измерения усилий, проверки усилия, прилагаемого к рабочей точке, на нахождение в пределах допустимого диапазона, расчета желаемого положения прилегания манипулятора, отправки управляющих команд исполнительным механизмам манипулятора на движение в желаемую позицию, приема значения ускорений от трехосевого акселерометра, сравнения их с предварительно заданным граничным значением и отключения питания манипулятора в случае его превышения.
Управляющий компьютер 18 связывается с блоком управления 8 манипулятором 1 по стандарту промышленных сетей пакетной передачи данных Ethernet. Связь компьютера с магнитным стимулятором 5 и системой оптического трекинга 4 осуществляется по универсальной последовательной шине подключения периферийных устройств USB 2.0. Таким же образом организована связь системы измерения усилий 9 с манипулятором 1. С сенсорным монитором 17 для обеспечения работы сенсора связь между управляющим компьютером 18 и монитором 17 осуществляется через универсальную последовательную шину типа B. Для вывода графического изображения на экран монитора 17 используется интерфейс для вывода изображений высокой четкости HDMI. С джойстиком 10 реализована беспроводная связь на основе технологии Bluetooth. Связь между блоком управления 8 манипулятором 1 и его приводными исполнительными механизмами осуществляется по стандарту промышленных автоматизированных сетей RS-485.
Джойстик 10 ручной подстройки положения манипулятора, расположенный на проксимальном конце дистального звена манипулятора, оснащен оптико-электронной измерительной системой, преобразующей движения джойстика по шести осям в электрические сигналы, обеспечивающие движение звеньев манипулятора. Джойстик 10 выполнен с возможностью управления скоростью движения манипулятора 1 для обеспечения плавного перемещения магнитного стимулятора 5, а также настройки масштабирования, чувствительности, инверсии движений по всем осям. Возможность настройки чувствительности и масштабирования влияет на точность управления при использовании джойстика, а контроль скорости перемещения обеспечивает плавные движения звеньев манипулятора, что в совокупности позволяет снизить риск нанесения травм и повреждений пациенту за счет плавного, точного, дозированного перемещения и воздействия устройством на выбранную область.
Сенсорный монитор 17 выполнен с возможностью обеспечения ввода, редактирования и визуального отображения данных о планировании и проведении процедуры ТМС, вывода нужного пункта меню, а также позволяет пользователю (оператору системы, врачу) наглядно видеть значение усилия в точке контакта головы пациента и магнитного стимулятора, и передавать это значение и другие необходимые данные в систему управления. Наглядное отображение значения усилия позволяет врачу регулировать степень давления устройством на выбранную область, предотвращая как избыточный контакт, несущий риск нанесения травм и повреждений пациенту, так и недостаточный, способствующий распространению индукции магнитного стимулятора за пределы выбранной зоны (точки воздействия), то есть снижению точности воздействия, а также снижению его эффективности в следствие того, что при недостаточной силе контакта магнитного стимулятора с головой пациента пик индукции может приходится на точки, предшествующие выбранной и необходимой для восстановления функций. Снижение точности и эффективности процедуры, равно как и риск нанесения механических травм и повреждений, небезопасно для пациента.
Программное обеспечение управления содержит совокупность программных модулей привязки координат головы пациента к системе координат робота с помощью системы оптического трекинга 4 на основе инфракрасных маркеров, роботизированной навигации магнитного стимулятора 5 на этапе картирования и воздействия на функциональные зоны головного мозга в ручном режиме, роботизированной навигации магнитного стимулятора 5 на этапе картирования и воздействия на функциональные зоны головного мозга в автоматическом режиме, контроля усилий прилагаемых к голове пациента на этапах картирования и стимулирующего воздействия, автоматизированного планирования роботизированной процедуры ТМС головного мозга, системы управления роботассистированным устройством.
Система оптического трекинга 4 содержит стойку 21 системы оптического трекинга, систему измерения, usb-адаптер, оправу (на фиг. не показана), выполненную в виде очковой оправы с возможностью размещения на голове пациента, с размещенным на ней по меньшей мере одним пассивным инфракрасным маркером. Стойка 21 содержит размещенные на ней инфракрасные камеры, выполненные с возможностью регистрации положения инфракрасных маркеров, и передачи данных в виде координат по трем осям и трем углам в режиме реального времени в систему управления. Как правило на стойке размещены две инфракрасные камеры, выполненные с возможностью регистрации положения инфракрасных маркеров с точностью до 0,25мм для пирамидального объема и 0,3 мм для вытянутого пирамидального объема в режиме реального времени и передачи данных в виде координат (X, Y, Z, α, β, Ω) на управляющий компьютер.
Магнитный стимулятор 5 представляет собой любой известный магнитный стимулятор для транскраниальной магнитостимуляции, содержит ручку и рабочую часть. Рабочая часть магнитного стимулятора 5 может содержать один или два койла. Одинарные койлы, как правило, круглые, двойные койлы могут быть выполнены в форме цифры «8» или иметь форму, напоминающую крылья бабочки.
Магнитный стимулятор 5 фиксируется к схвату манипулятора 1 посредством устройства фиксации 12 за ручку магнитного стимулятора таким образом, что продольная ось, проходящая через дистальное звено манипулятора 1, совпадает с центром рабочей части стимулятора 5. Такая фиксация стимулятора обеспечивает соосное положение дистального звена манипулятора, датчика силомоментного очувствления 6DoF и индуцируемого магнитным стимулятором пика магнитной индукции при работе устройства, то есть обеспечивает распространение пика индукции магнитной стимуляции именно в области касания головы пациента с достаточным (известным из показаний сенсорного монитора) усилием, предотвращая возможность оказания воздействия на рядом расположенные области или возможность оказания воздействия на более широкие области, чем необходимо, вследствие недостаточно сильного прилегания устройства к голове пациента. Таким образом, указанные особенности фиксации магнитного стимулятора к схвату манипулятора обеспечивают возможность точного, прицельного воздействия на выбранные точки, повышая безопасности процедуры. При этом на магнитном стимуляторе установлен по меньшей мере один инфракрасный маркер. К магнитному стимулятору 5 подведен гофрированный кабель-канал для подвода кабелей питания и управления магистралью жидкостного охлаждения. Магнитный стимулятор может иметь свою систему управления 7 магнитным стимулятором 5, а может быть интегрирован в систему управления 3.
Модуль безопасности 6 работы роботассистированного комплекса представляет собой программно-аппаратное решение, которое осуществляет мониторинг и предотвращение резких перемещений робота манипулятора независимо от верхнеуровневой системы управления.
Модуль безопасности включает 3-х осевой акселерометр, например, MEMS-акселерометр LIS3DHTR, который позволяет регистрировать скорости и ускорения по трем направлениям. Акселерометр расположен на дистальном звене манипулятора и выполнен с возможностью измерения ускорения дистального звена манипулятора по трем осям. При превышении измеренного акселерометром значения порогового значения происходит разрыв электрической цепи и остановка двигателя вне зависимости от заданных ранее программ управления. Это позволяет обеспечить возможность аварийной остановки работы устройства, дополнительно снижая риск нанесения пациенту травм или повреждения, то есть повышая его безопасность.
Работа комплекса осуществляется следующим образом:
Основные этапы проведения ТМС головного мозга для нейрореабилитации, принятые в соответствии с международными рекомендациями, включают в себя:
Этап 1 - «Подготовка пациента и оборудования к картированию»
В рамках данного этапа врач должен:
- определить показания к применению ТМС,
- выявить наличие или отсутствие противопоказаний,
- объяснить пациенту суть процедуры и провести краткую демонстрацию проведения ТМС,
- разместить пациента в кресле,
- включить аппарат ТМС,
- ввести данные пациента.
Этап 2 - «Картирование»
В рамках данного этапа врач с помощью магнитного стимулятора, работающего в режиме диагностики осуществляет поиск той точки коры головного мозга (hot-spot), которая отвечает за функцию головного мозга, утраченную пациентом в следствие заболевания.
На этом этапе врач должен:
- произвести разметку анатомических ориентиров и целевой точки головы пациента по системе 10-20 с помощью шапочки, сантиметровой рулетки и маркера,
- после этого приступить к этапу картирования целевой точки путем наведения центра магнитного стимулятора в место расположения целевой точки, которая была отмечена маркером на шапочке, при этом стимулятор должен быть ориентирован под 45° к сагиттальной плоскости головы пациента и обеспечивать плотное прилегание к голове пациента в точке контакта,
- осуществить подачу стимула (магнитного разряда) и в момент стимула получить визуальное подтверждение от него в виде физической реакции пациента (например, в случае с потерей двигательной функции левой руки при попадании стимула в точку моторного представительства левой руки у пациента дергается запястье левой руки),
- в случае если такого подтверждения нет, врач смещает стимулятор в шахматном порядке на 1,5-2,0 см и снова делает стимул и так до тех пор, пока не получит визуальное подтверждение, при этом между стимулами делаются паузы различной длительности от 1 до 5 секунд,
- в случае наличия визуального подтверждения врач уточняет зону картирования точки hot-spot путем смещения стимулятора с шагом 5 мм,
- при наличии более выраженной физиологической реакции пациента врач фиксирует положение стимулятора с помощью пассивного штатива-держателя, после чего делает контрольный стимул, чтобы исключить смещение от hot-spot при манипуляциях с пассивным штативом-держателем.
Этап 3 - «Определение порога моторного ответа»
В рамках данного этапа врач, согласно клиническому протоколу, выставляет необходимые параметры работы магнитного стимулятора и делает 10 стимулов, которые позволяют определить уровень порога моторного ответа конкретной точки.
Этап 4 - «Воздействие»
Врач устанавливает параметры для проведения ТМС головного мозга, после чего запускает работу магнитного стимулятора.
На основе изложенной этапности проведения процедуры ТМС головного мозга для нейрореабилитации сформирована следующая этапность проведения ТМС с помощью роботассистированного устройства:
Этап 1 - «Подготовительный этап»,
Этап 2 - «Планирование ТМС»,
Этап 3 - «Картирование»,
Этап 4 - «Определение порога моторного ответа»,
Этап 5 - «Воздействие».
После включения устройства, проведения автоматической диагностики работоспособности оборудования и ввода данных о пациенте, врач надевает на голову пациента оправу с размещенными на ней пассивными инфракрасными маркерами. Конфигурация расположения маркеров индивидуальна, что позволяет системе оптического трекинга правильно идентифицировать наблюдаемый объект. Как только наблюдаемый объект появится в поле зрения системы оптического трекинга произойдет его регистрация и отслеживание перемещений в пространстве в режиме реального времени. Такие же пассивные маркеры или маркер с другой конфигурацией расположения закреплены на магнитном стимуляторе. Система также регистрирует и отслеживает положение магнитного стимулятора с момента его появления в поле зрения камер системы. С помощью устройства крепления магнитного стимулятора к схвату манипулятора, осуществляется жесткая привязка координат положения стимулятора к базовой системе координат робота, а, следовательно, с помощью системы оптического трекинга можно знать положение манипулятора, магнитного стимулятора и головы пациента относительно друг друга в пространстве в каждый конкретный момент времени. Таким образом осуществляется привязка координат между наблюдаемыми объектами. После этого, с помощью специального указателя, на котором тоже имеются маркеры, врач, в соответствии с международной системой 10-20, отмечает анатомические ориентиры (реперные точки) на голове пациента. Далее, на основе полученных координат реперных точек и контроля положения головы пациента в пространстве с помощью оправы, система строит трехмерную параметрическую модель головы человека в виде 3D-шаблона с размеченными ориентирами. После этого, в зависимости от вида нарушений, с которыми пришел пациент, система выполняет предварительный расчет и разметку положения искомой точки для воздействия (hot-spot). Для удобства врача и наглядной визуализации данная точка отображается на 3D-шаблоне головы. Далее, осуществляется ручная или автоматическая навигация стимулятора в расчетную точку.
В ручном режиме навигация выполняется с помощью джойстика ручной подстройки положения манипулятора. В автоматическом режиме навигация осуществляется на основе расчетных координат точки hot-spot, где система управления формирует и выдает команды на блок управления манипулятором, который в свою очередь преобразует их в сигналы для управления приводами манипулятора, чтобы он переместил магнитный стимулятор в расчетную точку до контакта с головой пациента. Система измерения усилий позволяет однозначно и наглядно зафиксировать момент контакта магнитного стимулятора с поверхностью головы, обеспечить необходимую плотность прилегания, предотвращая как избыточный контакт, несущий риск нанесения травм и повреждений пациенту, так и недостаточный, способствующий распространению индукции магнитного стимулятора за пределы выбранной зоны, а также снижению эффективности воздействия вследствие того, что пик индукции может не совпадать с выбранной точкой воздействия при недостаточной плотности прилегания; то есть способствуя повышению безопасности процедуры. При этом, благодаря системе оптического трекинга решается еще одна важная задача - ориентация стимулятора под 45° к сагиттальной плоскости головы.
В случае, если по каким-то причинам не удалось обеспечить плотность контакта или требуемый угол ориентации, система предоставляет возможность подкорректировать положение и ориентацию стимулятора врачу, чтобы удовлетворить этим требованиям. Корректировка положения производится с помощью джойстика ручной подстройки положения манипулятора, благодаря которому производится точная и плавная подстройка положения звенев манипулятора, снижающая риски возникновения механических повреждений у пациента, с оказанием дозированного давления в нужной точке на голову пациента, величина которого находится под контролем врача благодаря ее отображению на сенсорном экране. На этом этап планирования ТМС завершается, и врач переходит к этапу картирования головного мозга с целью однозначного определения местоположения расчетной точки hot-spot.
Для этого выбирается режим картирования: ручной или автоматический. Режимы отличаются между собой тем, что в первом случае все перемещения стимулятора врач осуществляет самостоятельно с помощью джойстика ручной подстройки манипулятора, а во втором случае перемещения осуществляет сам робот.
Опишем дальнейшую последовательность действий алгоритма на примере ручного режима управления. При выборе ручного режима врач производит установку параметра грубого картирования - шаг перемещения стимулятора в диапазоне от 1,5 до 2,0 см. Далее, делается первый стимул (магнитный разряд). Результат стимула или его отсутствие врач должен наблюдать визуально. На примере нарушения двигательной функции левой руки, при подаче стимула и в случае попадания в точку hot-spot у пациента дергается кисть или какой-либо палец. В случае, если на поданный стимул не было никакого физиологического отклика, врач с помощью джойстика перемещает стимулятор согласно параметру грубого картирования, выдерживает паузу от 1 до 5 секунд, после чего снова подает стимул. Так происходит до тех пор, пока он не получит физиологический отклик от пациента, что будет являться подтверждением близости нахождения стимулятора к точке hot-spot. Далее, система переводит ручной режим перемещения грубого картирования в ручной режим точного картирования с шагом перемещения 0,5 см. Таким образом, сужается зона поиска точки hot-spot, а действия повторяются. В случае если, в процессе точного картирования врач смог визуально зафиксировать характерный физиологический отклик пациента, отличающийся от предыдущего по амплитуде, он делает контрольный стимул для подтверждения попадания в точку. После этого робот переходит в режим фиксации координат найденной точки, удержания в данном положении и ориентации магнитного стимулятора для того, чтобы врач смог провести этап определения порога моторного ответа. В процессе определения порога моторного ответа, система оптического трекинга отслеживает положение головы пациента по оправе с инфракрасными маркерами и в случае какого-либо смещения головы пациента относительно первоначального положения фиксирует это и передает данные на управляющий компьютер, который в свою очередь отображает эту информацию на экране оператора. Врач корректирует положение стимулятора таким образом, чтобы обеспечить плотность прилегания стимулятора к голове, ориентацию стимулятора под углом 45° к голове и попадание в найденную точку. При этом корректировка с использованием джойстика ручной подстройки манипулятора обеспечивает точную и плавную подстройку положения звенев манипулятора, снижая риски возникновения механических повреждений у пациента, с оказанием дозированного давления в нужной точке на голову пациента, величина которого находится под контролем врача благодаря ее отображению на сенсорном экране что также снижает риски, в частности неприцельного, недостаточного или избыточного воздействия, повышая безопасность процедуры. При этом особенности фиксации магнитного стимулятора к манипулятору гарантируют, что достигнутый с использованием джойстика ручной постройки контакт с головой пациента в выбранной области с величиной давления, контролируемой по показателям на сенсорном мониторе, обеспечит прицельное, необходимое и достаточное воздействие именно на выбранную точку/область головного мозга, что также повышает безопасность процедуры для пациента. После этого врач приступает к этапу терапевтического воздействия на точку hot-spot.
Для терапевтического воздействия существуют различные протоколы, известные и доступные в соответствующей медицинской литературе, включающие определенные точки воздействия и определенные параметры, зависящие от вида патологии.
Технический результат - повышение безопасности проводимой процедуры транскраниальной магнитной стимуляции с использованием роботассистированного комплекса - достигается за счет совместного использования в заявленном комплексе: джойстика ручной подстройки положения манипулятора, расположенного на проксимальном конце дистального звена манипулятора, оснащенного оптико-электронной измерительной системой, преобразующей движения джойстика по шести осям в электрические сигналы, обеспечивающие движение звеньев манипулятора, позволяющего специалисту, осуществляющему процедуру, независимо от выбранного режима осуществлять точную плавную подстройку манипулятора, что в сочетании с возможностью получения сведений о параметрах силы воздействия (то есть, по существу, силы прилегания стимулятора к голове пациента) от датчика силомоментного очувствления на сенсорном экране позволяет осуществлять деликатное по силе и достаточное по степени прилегания воздействие манипулятором, к схвату которого фиксирован магнитостимулятор, при этом фиксация осуществлена таким образом, что обеспечивает распространение пика индукции магнитной стимуляции именно в области касания головы пациента с достаточным (известным из показаний сенсорного монитора) усилием, предотвращая возможность оказания воздействия на рядом расположенные области или возможность оказания воздействия на более широкие области, чем необходимо, вследствие недостаточно сильного прилегания устройства к голове пациента. Кроме того, дополнительный вклад в достижение безопасности процедуры вносит включение в состав комплекса модуля безопасности, позволяющего полностью исключить влияние верхнеуровневого софта комплекса при возникновении аварийной ситуации.
Для оценки профиля безопасности были проанализированы опубликованные метаданные по безопасности проведения ТМС за период 2020-2021 гг. с использованием аппаратов TMS-Cobot и комплекса роботизированного контроля и навигации, взятых в качестве аналога и прототипа предложенного изобретения. Кроме того, по предложенным в этих источниках критериям оценки было проанализировано использование заявленного комплекса в период с февраля 2022 по октябрь 2023 гг.
Стандартизированная классификация побочных эффектов в соответствии с определениями нормативных актов ЕС приведена в табл. 1.
Таблица 1. Стандартизированная классификация побочных эффектов
Частота встречаемости побочных эффектов в процентах (%) от общего числа проведенных процедур при использовании 3 сопоставляемых комплексов приведена в табл. 2.
Таблица 2. Частота встречаемости побочных эффектов
Из представленной таблицы наглядно видно значительное снижение числа нежелательных побочных явлений и побочных реакций, связанных с устройством. Анализ причин, способствовавших такому снижению, позволил установить взаимосвязь снижения AE и ADR с уменьшением количества факторов, способных нести риски повреждения/возникновения нарушений у пациента в заявленном комплексе по сравнению с ранее известными. Так, в заявленном комплексе наличие самой возможности ручной подстройки положения манипулятора наряду с ее плавностью, благодаря использованию джойстика уменьшило число случаев столкновения манипулятора, несущего магнитный стимулятор, с головой пациента, соответственно уменьшив риски нанесения повреждения пациенту. Вывод сведений о силе воздействия (прижатия) к голове пациента на сенсорный экран позволило специалисту, проводящему процедуру, дозировать величину воздействия, снижая как риск повреждения, так и вероятность неприцельной стимуляции, которая также может нести риски как возникновения нежелательных явлений, так и побочных реакций. Предложенный вариант фиксации магнитного стимулятору к схвату манипулятора позволил сконцентрировать воздействие в целевой области, снижая риск нежелательных явлений при неточной стимуляции. А модуль безопасности позволил автоматически прервать процедуру при зависании программного обеспечения, в то время как идентичный случай с тмс-cobot привел к изменение алгоритма проведения процедуры, небезопасному для пациента.
Таким образом, совместное использование джойстика ручной подстройки, возможности вывода сведений о силе воздействия на сенсорный экран, особенностей фиксации манипулятора и магнитостимулятора способствует значительному уменьшению вероятности нанесения пациенту повреждений, как непосредственно в результате реализации комплексом для ТМС алгоритмов перемещения, так и в результате осуществления комплексом процедуры магнитной стимуляции. Дополнительный вклад в достижение безопасности процедуры вносит включение в состав комплекса акселерометра, выполненного с возможностью измерения ускорения дистального звена манипулятора по трем осям, и возможности остановки двигателя вне зависимости от заданных ранее программ управления, при превышении значения измеренного акселерометром порогового значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный реабилитационный аппаратно-программный комплекс с биологической обратной связью и модулем электромиостимуляции | 2024 |
|
RU2838938C1 |
| Устройство для тренировки рук при выполнении навигационной транскраниальной магнитной стимуляции | 2023 |
|
RU2817982C1 |
| Способ стимуляции головного мозга | 2023 |
|
RU2822811C1 |
| Способ лечения профессиональной вегетативно-сенсорной полинейропатии верхних конечностей | 2020 |
|
RU2732349C1 |
| НЕМЕДИКАМЕНТОЗНЫЙ СПОСОБ ЛЕЧЕНИЯ АДИНАМИЧЕСКИХ ДЕПРЕССИЙ | 2022 |
|
RU2801161C1 |
| Способ повышения скорости реакции человека на внешние визуальные стимулы | 2023 |
|
RU2823493C1 |
| СПОСОБ ЛЕЧЕБНОГО ВОЗДЕЙСТВИЯ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИЕЙ ПРИ ПРОЗОПАЛГИЯХ | 2010 |
|
RU2462281C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Ассистирующий комплекс для взятия биоматериала из зева в условиях пандемии | 2020 |
|
RU2736541C1 |
| Способ лечения вибрационной болезни, связанной с воздействием локальной вибрации | 2016 |
|
RU2612837C1 |

Изобретение относится к области медицины, а именно к неинвазивным методам нейростимуляции и нейромодуляции головного мозга, и предназначено для электромагнитной индукции электрического поля в заданном участке головного мозга. Предложен комплекс для проведения транскраниальной магнитной стимуляции, включающий аппаратную стойку, на корпусе которой размещены коллаборативный роботассистированный манипулятор, содержащий звенья и имеющий шесть степеней подвижности, оснащенный схватом манипулятора, выполненным на дистальном конце дистального звена манипулятора с возможностью удержания устройства фиксации магнитного стимулятора; магнитным стимулятором, содержащим рабочую часть, включающую один или несколько койлов, и ручку стимулятора, съемно прикрепленную с помощью устройства фиксации магнитного стимулятора к схвату манипулятора таким образом, что продольная ось, проходящая через дистальное звено манипулятора, совпадает с центром рабочей части стимулятора, при этом на магнитном стимуляторе установлен по меньшей мере один инфракрасный маркер; шестиосевым датчиком силомоментного очувствления, подключенным к схвату манипулятора и выполненным с возможностью измерения усилия в точке контакта головы пациента и магнитного стимулятора, джойстиком ручной подстройки положения манипулятора, расположенным на проксимальном конце дистального звена манипулятора, оснащенным оптико-электронной измерительной системой, преобразующей движения джойстика по шести осям в электрические сигналы, обеспечивающие движение звеньев манипулятора; трехосевым акселерометром, расположенным на дистальном звене манипулятора и выполненным с возможностью измерения ускорения дистального звена манипулятора по трем осям, сенсорный монитор, выполненный с возможностью ввода, редактирования и визуального отображения данных о планировании и проведении процедуры транскраниальной магнитной стимуляции, включая отображение значения усилия в точке контакта головы пациента и магнитного стимулятора, и их передачи в систему управления; систему оптического трекинга, содержащую очковую оправу, выполненную с возможностью размещения на голове пациента и содержащую по меньшей мере один инфракрасный маркер, и стойку с размещенными на ней инфракрасными камерами, выполненными с возможностью регистрации положения инфракрасных маркеров, и передачи данных в виде координат по трем осям и трем углам в режиме реального времени в систему управления; систему управления, включающую управляющий компьютер, выполненный с возможностью приема данных от сенсорного монитора о планировании и проведении процедуры транскраниальной магнитной стимуляции и выдачи управляющих команд исполнительным механизмам манипулятора, приема данных томографических исследований пациента, построения и отображением на их основании 3D-модели головного мозга пациента, приема данных о положении инфракрасных маркеров от системы оптического трекинга с расчетом относительных координат магнитного стимулятора и головы пациента, привязки координат головы пациента относительно координат магнитного стимулятора, сопоставления точек реального объекта с модельными с их визуализацией на экране, перерасчета модельных точек и выдачи управляющих команд исполнительным механизмам манипулятора, расчета положений рабочей точки относительно головы пациента, планирования траекторий перехода между целевыми положениями магнитного стимулятора, отслеживания выполнения спланированных траекторий; приема данных от джойстика ручной подстройки положения манипулятора, перерасчета смещений крышки джойстика в желаемую скорость и направление движения схвата манипулятора, преобразования желаемой скорости и направления движения схвата манипулятора в управляющие команды исполнительным механизмам манипулятора и выдачи управляющих команд, приема данных от системы измерения усилий, проверки усилия, прилагаемого к рабочей точке, на нахождение в пределах допустимого диапазона, расчета желаемого положения прилегания манипулятора, отправки управляющих команд исполнительным механизмам манипулятора на движение в желаемую позицию, приема значения ускорений от трехосевого акселерометра, сравнения их с предварительно заданным граничным значением и отключения питания манипулятора в случае его превышения. Изобретение обеспечивает повышение безопасности проводимой процедуры транскраниальной магнитной стимуляции для пациента с использованием роботассистированного комплекса. 5 з.п. ф-лы, 3 ил., 2 табл.
1. Комплекс для проведения транскраниальной магнитной стимуляции, включающий аппаратную стойку, на корпусе которой размещены коллаборативный роботассистированный манипулятор, содержащий звенья и имеющий шесть степеней подвижности, оснащенный схватом манипулятора, выполненным на дистальном конце дистального звена манипулятора с возможностью удержания устройства фиксации магнитного стимулятора; магнитным стимулятором, содержащим рабочую часть, включающую один или несколько койлов, и ручку стимулятора, съемно прикрепленную с помощью устройства фиксации магнитного стимулятора к схвату манипулятора таким образом, что продольная ось, проходящая через дистальное звено манипулятора, совпадает с центром рабочей части стимулятора, при этом на магнитном стимуляторе установлен по меньшей мере один инфракрасный маркер; шестиосевым датчиком силомоментного очувствления, подключенным к схвату манипулятора и выполненным с возможностью измерения усилия в точке контакта головы пациента и магнитного стимулятора, джойстиком ручной подстройки положения манипулятора, расположенным на проксимальном конце дистального звена манипулятора, оснащенным оптико-электронной измерительной системой, преобразующей движения джойстика по шести осям в электрические сигналы, обеспечивающие движение звеньев манипулятора; трехосевым акселерометром, расположенным на дистальном звене манипулятора и выполненным с возможностью измерения ускорения дистального звена манипулятора по трем осям; сенсорный монитор, выполненный с возможностью ввода, редактирования и визуального отображения данных о планировании и проведении процедуры транскраниальной магнитной стимуляции, включая отображение значения усилия в точке контакта головы пациента и магнитного стимулятора, и их передачи в систему управления; систему оптического трекинга, содержащую очковую оправу, выполненную с возможностью размещения на голове пациента и содержащую по меньшей мере один инфракрасный маркер, и стойку с размещенными на ней инфракрасными камерами, выполненными с возможностью регистрации положения инфракрасных маркеров, и передачи данных в виде координат по трем осям и трем углам в режиме реального времени в систему управления; систему управления, включающую управляющий компьютер, выполненный с возможностью приема данных от сенсорного монитора о планировании и проведении процедуры транскраниальной магнитной стимуляции и выдачи управляющих команд исполнительным механизмам манипулятора, приема данных томографических исследований пациента, построения и отображением на их основании 3D-модели головного мозга пациента, приема данных о положении инфракрасных маркеров от системы оптического трекинга с расчётом относительных координат магнитного стимулятора и головы пациента, привязки координат головы пациента относительно координат магнитного стимулятора, сопоставления точек реального объекта с модельными с их визуализацией на экране, перерасчета модельных точек и выдачи управляющих команд исполнительным механизмам манипулятора, расчета положений рабочей точки относительно головы пациента, планирования траекторий перехода между целевыми положениями магнитного стимулятора, отслеживания выполнения спланированных траекторий; приема данных от джойстика ручной подстройки положения манипулятора, перерасчета смещений крышки джойстика в желаемую скорость и направление движения схвата манипулятора, преобразования желаемой скорости и направления движения схвата манипулятора в управляющие команды исполнительным механизмам манипулятора и выдачи управляющих команд, приема данных от системы измерения усилий, проверки усилия, прилагаемого к рабочей точке, на нахождение в пределах допустимого диапазона, расчета желаемого положения прилегания манипулятора, отправки управляющих команд исполнительным механизмам манипулятора на движение в желаемую позицию, приема значения ускорений от трехосевого акселерометра, сравнения их с предварительно заданным граничным значением и отключения питания манипулятора в случае его превышения.
2. Комплекс по п. 1, в котором управление магнитным стимулятором интегрировано в систему управления комплексом.
3. Комплекс по п. 1, в котором аппаратная стойка выполнена с возможностью перемещения.
4. Комплекс по п. 3, в котором аппаратная стойка содержит роликовые колеса и ручки.
5. Комплекс по п. 1, в котором инфракрасные камеры выполнены с возможностью регистрации положения инфракрасных маркеров с точностью до 0,25 мм для пирамидального объема и 0,3 мм для вытянутого пирамидального объема.
6. Комплекс по п. 1, в котором трехосевой акселерометр представляет собой MEMS-акселерометр.
| WO 2023038906 A1, 16.03.2023 | |||
| Оправка для прокатки труб на расширительном стане косой прокатки из прошитой заготовки | 1940 |
|
SU127637A1 |
| CN 109009438 A, 18.12.2018 | |||
| CN 109925055 A, 25.06.2019 | |||
| CN 112842536 A, 28.05.2021. | |||
