Область техники
Настоящее изобретение относится к области техники транспортных средств с гибридным двигателем, и в частности относится к способу управления запуском и остановкой гибридного транспортного средства.
Предпосылки изобретения
Транспортное средство с гибридным двигателем (сокращенно именуемое далее гибридным транспортным средством) обычно содержит несколько источников движущей силы, таких как двигатель и электродвигатель, и может работать как в режиме исключительно электропривода, в котором работает только электродвигатель, так и может работать в режиме гибридного привода, в котором работает как электродвигатель, так и двигатель. Поэтому одним важным аспектом в управлении гибридным транспортным средством является управление переключением между режимом исключительно электропривода и режимом гибридного привода, при этом оно относится к управлению запуском и остановкой двигателя.
Что касается гибридного транспортного средства, то при запуске его двигателя легко возникает нестабильность работы цилиндров, и влияние таких факторов, как нелинейное изменение скорости вращения двигателя и резонанс, возникающий при прохождении интервала низких скоростей вращения, приводит к тряске. Кроме того, в процессе остановки двигателя в гибридном транспортном средстве двигатель может останавливаться лишь естественным путем, поэтому, кроме причин, когда нет нестабильности работы цилиндров при запуске двигателя, влияние нелинейного изменения скорости вращения двигателя и резонанса при низкой скорости вращения остается основным источником тряски в процессе остановки двигателя. Кроме того, что касается гибридного транспортного средства с планетарным рядом, то ввиду того, что в нем упрощена конструкция регулируемой передачи и применяется еще более интегрированная конструкция, часто больше не устанавливаются главный фрикцион и гидравлический преобразователь крутящего момента для «разделения» двигателя и коробки передач, поэтому система гибридного привода с планетарным рядом также обладает новыми характеристиками силовой передачи. В процессе увеличения и уменьшения скорости планетарного ряда часть сил инерции будет действовать на выходной конец планетарного ряда; когда три соединительных конца планетарного ряда служат как входные или выходные концы мощности, то при работе в установившемся режиме без увеличения и уменьшения скорости фиксированный момент силы также будет передаваться на ступицу колеса, что приводит к тому, что тряска в продольном направлении всего транспортного средства ощущается еще сильнее. Поэтому, по сравнению с другим гибридным транспортным средством без планетарного ряда, к плавности запуска и остановки гибридного транспортного средства с планетарным рядом предъявляются новые требования.
Кроме того, в существующих сегодня способах запуска и остановки гибридного транспортного средства с планетарным рядом часто не учитывается передаваемый в продольном направлении крутящий момент, который система гибридного привода с планетарным рядом передает на ступицу колеса, в частности не учитывается инерционный крутящий момент системы валов, что приводит к тому, что проблема продольной тряски по-прежнему существует.
Суть изобретения
Цель настоящего изобретения заключается в предоставлении способа управления запуском и остановкой гибридного транспортного средства для решения проблемы продольной тряски всего транспортного средства, существующей в способах, известных из уровня техники, при запуске и остановке гибридного транспортного средства с планетарным рядом.
Для реализации вышеуказанной цели в вариантах осуществления настоящего изобретения представлен способ управления запуском гибридного транспортного средства, при этом способ включает следующее: расчет передаваемого в продольном направлении крутящего момента планетарного ряда; основанный на передаваемом в продольном направлении крутящем моменте точный расчет компенсирующего крутящего момента, который должен выводить приводной двигатель; и последующее управление приводным двигателем для вывода компенсирующего крутящего момента с передачей компенсирующего крутящего момента на ступицу колеса, чем точно нейтрализуется передаваемый в продольном направлении крутящий момент, и, следовательно, может эффективно подавляться продольная тряска всего транспортного средства, вызываемая при запуске передаваемым в продольном направлении крутящим моментом, и улучшаются плавность и бесшумность запуска гибридного транспортного средства.
Предпочтительно способ управления запуском гибридного транспортного средства дополнительно включает управление запуском двигателя и управление генератором для приложения к двигателю крутящего момента перемещения для управления скоростью вращения двигателя. Можно понять, что этим в основном учитывается то, что при прохождении двигателем резонансной полосы легко возникает резонанс, что приводит к возникновению тряски; поэтому посредством генератора активно повышают обороты двигателя, так что двигатель быстро достигает скорости вращения в конечной точке резонансной полосы, и, таким образом, может уменьшаться влияние резонансной полосы на двигатель и дополнительно уменьшаться вызываемая резонансной полосой тряска всего транспортного средства, при этом также сокращается время запуска и повышается эффективность запуска.
Предпочтительно процесс расчета передаваемого в продольном направлении крутящего момента планетарного ряда включает измерение скорости вращения генератора, и на основании скорости вращения генератора и момента инерции системы валов рассчитывают передаваемый в продольном направлении крутящий момент. На основании этого можно точно измерять передаваемый в продольном направлении крутящий момент, который в процессе запуска передается на ступицу колеса, чтобы точно компенсировать передаваемый в продольном направлении крутящий момент.
Предпочтительно посредством расчетной формулы компенсирующего крутящего момента точно рассчитывают компенсирующий крутящий момент, который должен выводить приводной двигатель, и это не только делает расчет крайне удобным, но и может способствовать точному управлению приводным двигателем для выведения крутящего момента соответствующей величины, так что компенсирующий крутящий момент и передаваемый в продольном направлении крутящий момент могут нейтрализовать друг друга. При этом расчетная формула компенсирующего крутящего момента следующая:
 ,
,
при этом  представляет собой компенсирующий крутящий момент;
представляет собой компенсирующий крутящий момент;  представляет собой передаточное отношение между водилом планетарной передачи и приводным двигателем в планетарном ряде;
представляет собой передаточное отношение между водилом планетарной передачи и приводным двигателем в планетарном ряде;  представляет собой характеристический параметр планетарного ряда;
представляет собой характеристический параметр планетарного ряда;  представляет собой крутящий момент перемещения генератора;
представляет собой крутящий момент перемещения генератора;  представляет собой фрикционный крутящий момент двигателя при текущей скорости вращения;
представляет собой фрикционный крутящий момент двигателя при текущей скорости вращения;  представляет собой крутящий момент перемещения коробки передач в гибридном транспортном средстве;
представляет собой крутящий момент перемещения коробки передач в гибридном транспортном средстве;  представляет собой передаваемый в продольном направлении крутящий момент;
представляет собой передаваемый в продольном направлении крутящий момент;  представляет собой момент инерции коронной шестерни, эквивалентный планетарному ряду, в системе гибридного привода с планетарным рядом, то есть представляет собой момент инерции системы валов;
представляет собой момент инерции коронной шестерни, эквивалентный планетарному ряду, в системе гибридного привода с планетарным рядом, то есть представляет собой момент инерции системы валов;  представляет собой угловое ускорение, эквивалентное коронной шестерне в системе гибридного привода с планетарным рядом.
представляет собой угловое ускорение, эквивалентное коронной шестерне в системе гибридного привода с планетарным рядом.
Предпочтительно управление приводным двигателем для выведения компенсирующего крутящего момента включает последовательное разделение процесса запуска двигателя на несколько фаз запуска, и при разных фазах запуска соответственно управляют приводным двигателем для выведения компенсирующего крутящего момента, соответствующего фазе запуска, в которой находится двигатель. Этим в основном учитывается то, что скорости вращения генератора в разных фазах запуска отличаются в некоторой степени, и, соответственно, величина передаваемого в продольном направлении крутящего момента также разная, поэтому необходимо в отношении разных фаз запуска гибко регулировать компенсирующий крутящий момент, в результате чего можно обеспечить то, что выводимый приводным двигателем компенсирующий крутящий момент и передаваемый в продольном направлении крутящий момент могут точно нейтрализовать друг друга, чем обеспечивается плавность всего транспортного средства в процессе запуска.
Предпочтительно процесс запуска включает последовательно разделенные фазу предварительной нагрузки, фазу пикового перемещения, фазу перемещения и удержания и фазу ослабления крутящего момента и запуска. На основании этого в фазе предварительной нагрузки управляют приводным двигателем без выведения компенсирующего крутящего момента; в фазе пикового перемещения управляют приводным двигателем для выведения пикового компенсирующего крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе пикового перемещения; в фазе перемещения и удержания управляют приводным двигателем для выведения поддерживающего компенсирующего крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе перемещения и удержания; в фазе ослабления крутящего момента и запуска управляют приводным двигателем для продолжения выведения поддерживающего компенсирующего крутящего момента, затем после успешного запуска двигателя устраняют поддерживающий компенсирующий крутящий момент с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе ослабления крутящего момента и запуска. Можно заметить, что в способе согласно настоящему изобретению можно аккуратно управлять компенсирующим крутящим моментом, который необходимо выводить в процессе запуска, и тем самым точно устранять передаваемый в продольном направлении крутящий момент, возникающий в каждой фазе запуска.
Предпочтительно в реальном времени измеряют скорость вращения двигателя и измеряют длительность запуска, затем на основании скорости вращения двигателя и измеренной длительности запуска устанавливают фазу запуска, в которой находится двигатель. При этом устанавливают процесс с момента приема двигателем команды запуска до резкого изменения значения скорости вращения двигателя от 0 до значения, которое больше чем 0, в качестве фазы предварительной нагрузки; устанавливают процесс, в котором скорость вращения двигателя увеличивается от 0 до конечной точки резонансной полосы, в качестве фазы пикового перемещения; устанавливают процесс, в котором происходит увеличение скорости вращения двигателя от конечной точки резонансной полосы до точки начала зажигания, в качестве фазы перемещения и удержания, при этом точка начала зажигания представляет собой скорость вращения двигателя при начале зажигания; устанавливают процесс, в котором происходит увеличение скорости вращения двигателя от точки начала зажигания до точки стабильного вращения, и процесс, происходящий от достижения точки стабильного вращения до успешного запуска двигателя, в качестве фазы ослабления крутящего момента и запуска, при этом точка стабильного вращения представляет собой скорость вращения, при которой происходит стабильное зажигание двигателя с обеспечением выведения двигателем стабильного крутящего момента. Таким образом можно точно устанавливать фазу запуска, в которой находится двигатель, чтобы управлять компенсирующим крутящим моментом соответствующей величины, выводимым приводным двигателем, для выполнения точной компенсации передаваемого в продольном направлении крутящего момента.
В вариантах осуществления настоящего изобретения также представлен способ управления остановкой гибридного транспортного средства, при этом способ включает расчет передаваемого в продольном направлении крутящего момента планетарного ряда; основанный на передаваемом в продольном направлении крутящем моменте расчет компенсирующего крутящего момента, который должен выводить приводной двигатель; и последующее управление приводным двигателем для выведения компенсирующего крутящего момента с передачей компенсирующего крутящего момента на ступицу колеса, в результате чего нейтрализуется передаваемый в продольном направлении крутящий момент, и, следовательно, может эффективно подавляться продольная тряска всего транспортного средства при остановке, и улучшаются плавность и бесшумность гибридного транспортного средства при остановке.
Предпочтительно способ управления остановкой гибридного транспортного средства дополнительно включает управление остановкой двигателя и управление генератором для приложения к двигателю крутящего момента перемещения для управления скоростью вращения двигателя. Можно понять, что процесс остановки характеризуется резонансной полосой, которая легко вызывает тряску двигателя, поэтому при остановке посредством генератора активно оказывается воздействие на двигатель, так что двигатель быстро проходит резонансную полосу, и, таким образом, может уменьшаться влияние резонансной полосы на двигатель и дополнительно уменьшаться вызываемая резонансной полосой тряска всего транспортного средства, при этом также сокращается время остановки и повышается эффективность остановки.
Предпочтительно путем измерения скорости вращения генератора на основании скорости вращения генератора и момента инерции системы валов точно рассчитывают передаваемый в продольном направлении крутящий момент, и, таким образом, можно удобно управлять приводным двигателем, обеспечивая то, что выводимый приводным двигателем компенсирующий крутящий момент может точно нейтрализовать передаваемый в продольном направлении крутящий момент.
Предпочтительно посредством расчетной формулы компенсирующего крутящего момента получают величину компенсирующего крутящего момента, который должен выводить приводной двигатель, и это не только делает расчет крайне удобным, но и может способствовать точному управлению приводным двигателем, чтобы он выводил крутящий момент соответствующей величины, который взаимно нейтрализуется с передаваемым в продольном направлении крутящим моментом.
При этом расчетная формула компенсирующего крутящего момента следующая:
,
при этом представляет собой компенсирующий крутящий момент; представляет собой передаточное отношение между водилом планетарной передачи и приводным двигателем в планетарном ряде; представляет собой характеристический параметр планетарного ряда; представляет собой крутящий момент перемещения генератора; представляет собой фрикционный крутящий момент двигателя при текущей скорости вращения; представляет собой крутящий момент перемещения коробки передач в гибридном транспортном средстве; представляет собой передаваемый в продольном направлении крутящий момент; представляет собой момент инерции коронной шестерни, эквивалентный планетарному ряду, в системе гибридного привода с планетарным рядом, то есть представляет собой момент инерции системы валов; представляет собой угловое ускорение, эквивалентное коронной шестерне в системе гибридного привода с планетарным рядом.
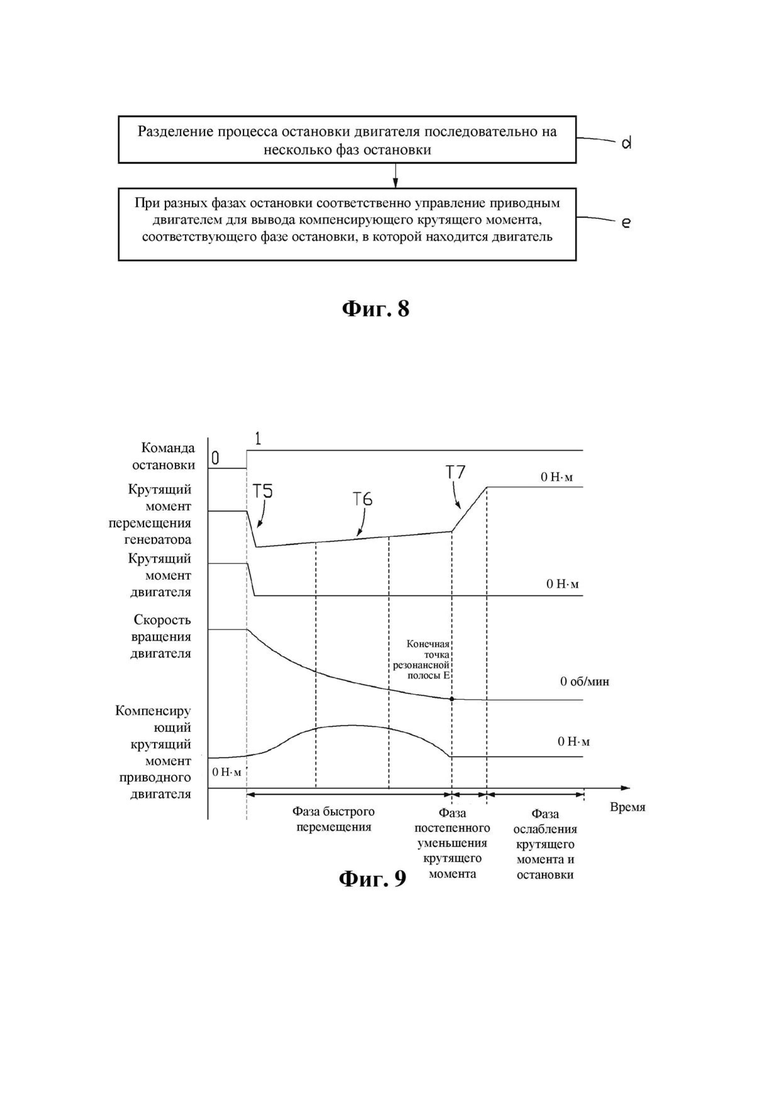
Предпочтительно процесс остановки двигателя последовательно делят на несколько фаз остановки и затем при разных фазах остановки соответственно управляют приводным двигателем для выведения компенсирующего крутящего момента, соответствующего фазе остановки, в которой находится двигатель. Этим в основном учитывается то, что величина передаваемого в продольном направлении крутящего момента, возникающего в разных фазах остановки, отличается в некоторой степени, поэтому необходимо в отношении разных фаз остановки гибко регулировать компенсирующий крутящий момент, в результате чего можно обеспечить то, что выводимый приводным двигателем компенсирующий крутящий момент и передаваемый в продольном направлении крутящий момент могут точно нейтрализовать друг друга, и этим обеспечивается плавность всего транспортного средства в процессе остановки.
Предпочтительно процесс остановки двигателя включает последовательно разделенные фазу быстрого перемещения, фазу постепенного уменьшения крутящего момента и фазу ослабления крутящего момента и остановки. На основании этого в фазе быстрого перемещения управляют приводным двигателем для вывода компенсирующего крутящего момента перемещения с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе быстрого перемещения; в фазе постепенного уменьшения крутящего момента управляют приводным двигателем для выведения компенсирующего крутящего момента перемещения с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе постепенного уменьшения крутящего момента; в фазе ослабления крутящего момента и остановки управляют приводным двигателем для вывода компенсирующего крутящего момента для ослабления крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе ослабления крутящего момента и остановки. Можно заметить, что в способе согласно настоящему изобретению можно аккуратно управлять компенсирующим крутящим моментом, который необходимо выводить в процессе остановки, и тем самым точно устранять передаваемый в продольном направлении крутящий момент, возникающий в каждой фазе остановки.
Предпочтительно последовательное разделение процесса остановки двигателя на несколько фаз включает то, что в реальном времени измеряют скорость вращения двигателя и измеряют длительность остановки, затем на основании скорости вращения двигателя и измеренной длительности остановки устанавливают фазу остановки, в которой находится двигатель. При этом устанавливают процесс, в котором происходит снижение скорости вращения двигателя от скорости вращения перед остановкой до конечной точки резонансной полосы, в качестве фазы быстрого перемещения; устанавливают процесс, в котором происходит снижение скорости вращения двигателя от конечной точки резонансной полосы до 0, в качестве фазы постепенного уменьшения крутящего момента; устанавливает процесс, проходящий от снижения скорости вращения до 0 до полной остановки двигателя, в качестве фазы ослабления крутящего момента и остановки. Таким образом, можно точно устанавливать фазу остановки, в которой находится двигатель, чтобы управлять компенсирующим крутящим моментом соответствующей величины, выводимым приводным двигателем, для выполнения точной компенсации передаваемого в продольном направлении крутящего момента.
Варианты осуществления настоящего изобретения характеризуются по меньшей мере следующими положительными эффектами:
1. Для подавления продольной тряски в процессе запуска и остановки, вызванной тем, что часть момента силы, возникающего ввиду характеристик конструкции с планетарным рядом, передается на колеса, согласно настоящему изобретению точно измеряют компенсирующий крутящий момент, который должен выводить приводной двигатель, и с помощью такого компенсирующего крутящего момента точно нейтрализуют крутящий момент, передаваемый в процессе запуска и остановки в продольном направлении, в результате чего можно без увеличения расходов на какое-либо дополнительное оборудование эффективно подавлять продольную тряску всего транспортного средства, вызванную запуском и остановкой, и повышать плавность и бесшумность запуска и остановки всего транспортного средства.
2. В способе управления запуском и остановкой гибридного транспортного средства согласно настоящему изобретению проводят измерение скорости вращения двигателя и измерение длительности остановки, на основании чего можно точно разграничивать все фазы процесса запуска и остановки, и путем совместного управления скоростью вращения и крутящим моментом двигателя, генератора и приводного двигателя можно осуществлять аккуратное управление процессом запуска и процессом остановки гибридного транспортного средства.
3. Согласно настоящему изобретению в процессе запуска двигателя путем поэтапного приложения генератором соответствующего крутящего момента перемещения быстро повышают обороты двигателя для последовательного прохождения резонансной полосы, точки начала зажигания и точки стабильного вращения, и, следовательно, может уменьшаться тряска всего транспортного средства при прохождении резонансной полосы и сокращаться время запуска.
4. Согласно настоящему изобретению в процессе остановки двигателя путем поэтапного приложения генератором соответствующего крутящего момента перемещения двигатель быстрого проводят через резонансную полосу и, когда скорость вращения двигателя становиться ниже, чем резонансная полоса, быстро устраняют крутящий момент перемещения для предотвращения обратного вращения двигателя, и, таким образом, могут быть решены существующие проблемы медленного процесса остановки двигателя и тряски при прохождении резонансной полосы, имеющиеся во время естественной остановки.
5. Согласно настоящему изобретению может осуществляться запуск в положении N, без необходимости в принудительном запуске в положении P, и переключение режимов может быть гибким и удобным, чем могут обеспечиваться лучшие клиентские впечатления.
6. Способ согласно настоящему изобретению используется в транспортном средстве с гибридным двигателем, снабженном планетарным рядом, с последовательно-параллельным соединением, при этом он точно компенсирует крутящий момент перемещения системы гибридного привода с последовательно-параллельным соединением и передаваемый в продольном направлении крутящий момент, вызванный моментом инерции валов, в результате чего преодолевается тряска при запуске и остановке гибридного транспортного средства с планетарным рядом и последовательно-параллельным соединением, и изобретение является способом более целенаправленного управления запуском и остановкой.
Описание прилагаемых графических материалов
Для более понятного описания технических решений в вариантах осуществления настоящего изобретения или аналогах, известных из уровня техники, ниже кратко представлены прилагаемые графические материалы, которые необходимо использовать при описании вариантов осуществления или аналогов, известных из уровня техники; совершенно очевидно, что прилагаемые графические материалы в нижеследующем описании представляют собой только некоторые варианты осуществления настоящего изобретения, и средний специалист в данной области техники без приложения творческих усилий также может на основании этих прилагаемых графических материалов получить другие графические материалы.
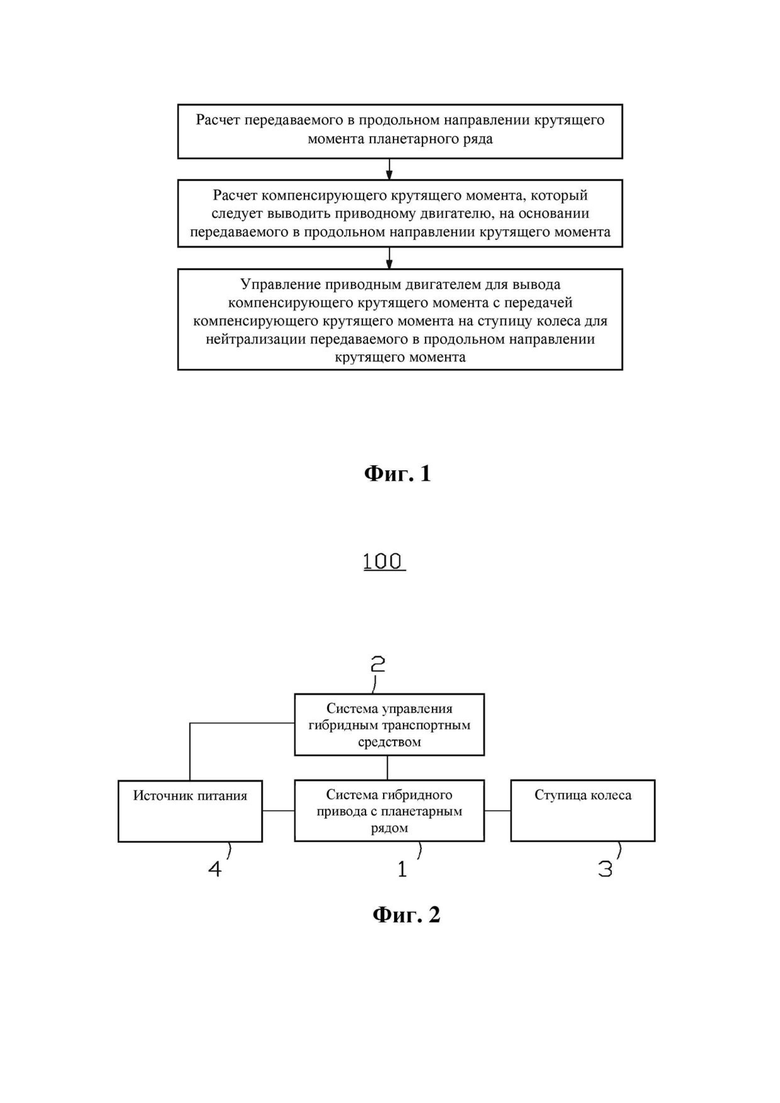
На фиг. 1 представлена блок-схема способа управления запуском и остановкой гибридного транспортного средства согласно вариантам осуществления настоящего изобретения.
На фиг. 2 представлена схема гибридного транспортного средства, в котором применяется способ по фиг. 1.
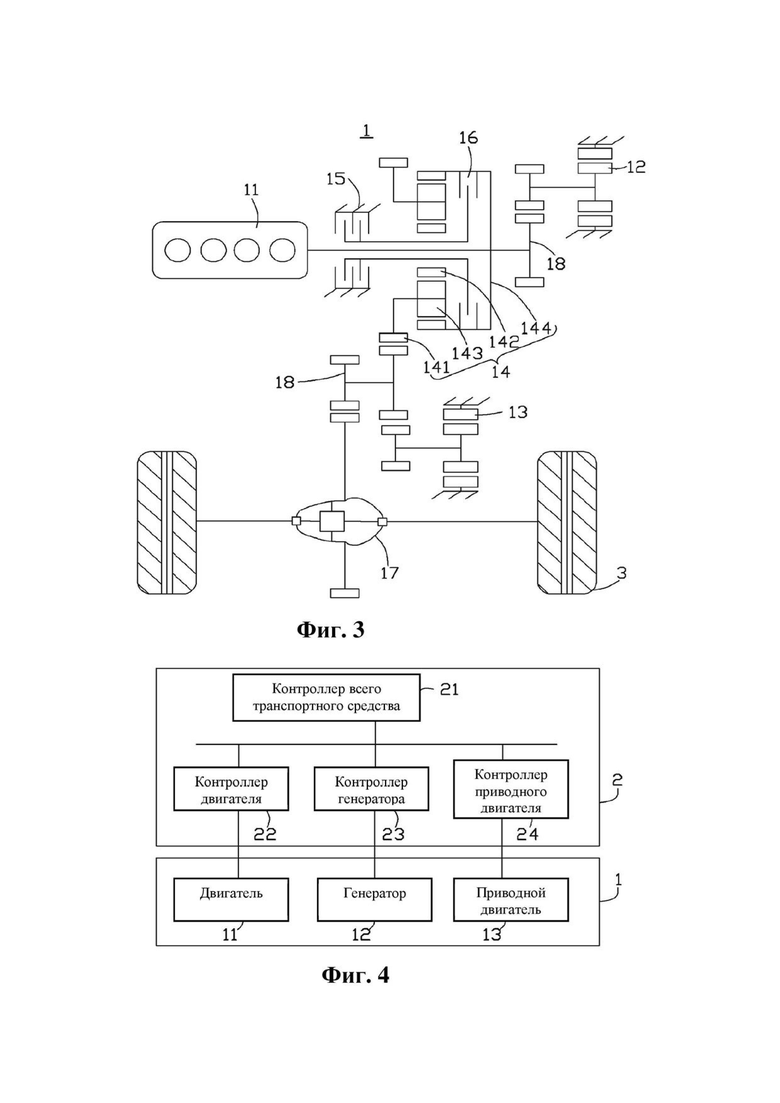
На фиг. 3 представлено схематическое изображение системы гибридного привода с планетарным рядом по фиг. 2.
На фиг. 4 представлена схема системы управления гибридным транспортным средством по фиг. 2.
На фиг. 5 представлена блок-схема управления приводным двигателем для вывода компенсирующего крутящего момента в процессе запуска способом по фиг. 1.
На фиг. 6 представлена блок-схема управления генератором для вывода крутящего момента перемещения в процессе запуска и остановки способом по фиг. 1.
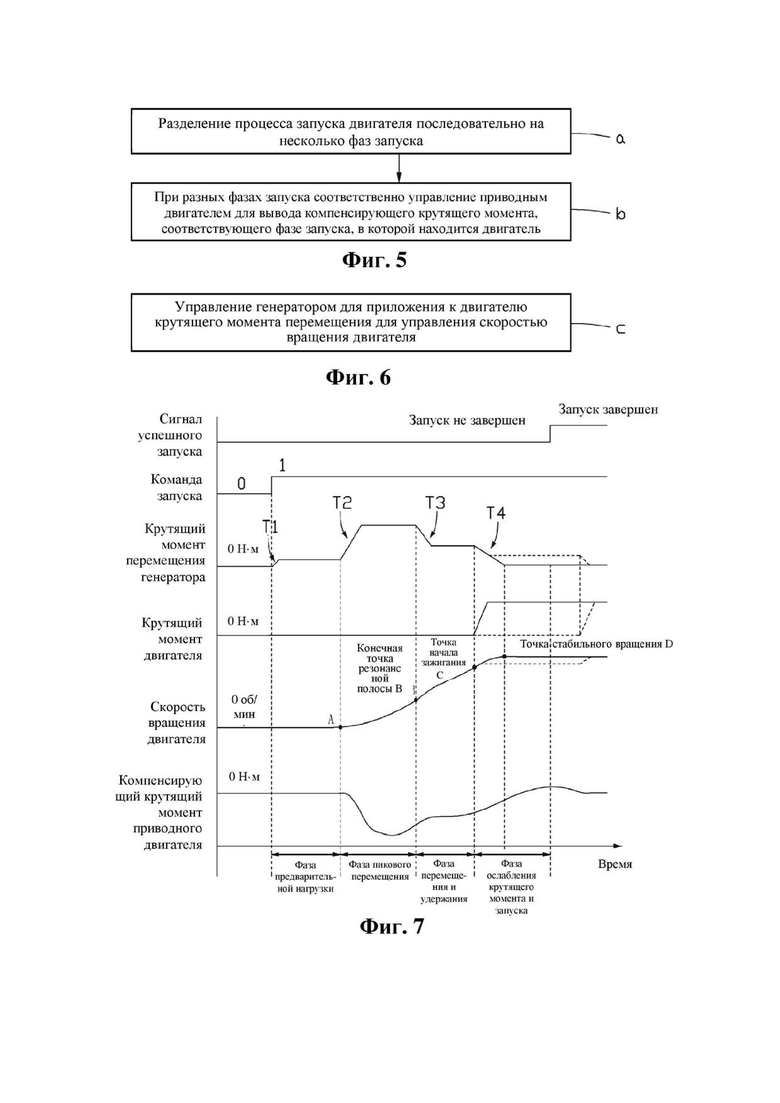
На фиг. 7 представлена диаграмма последовательности управления запуском гибридного транспортного средства способом по фиг. 1.
На фиг. 8 представлена блок-схема способа управления приводным двигателем для вывода компенсирующего крутящего момента в процессе остановки способом по фиг. 1.
На фиг. 9 представлена диаграмма последовательности управления остановкой гибридного транспортного средства способом по фиг. 1.
Описание номеров ссылочных позиций основных элементов
Настоящее изобретение дополнительно описано ниже с помощью конкретных способов осуществления в сочетании с вышеуказанными прилагаемыми графическими материалами.
Конкретные способы осуществления
Чтобы специалистам в данной области техники были лучше понятны решения согласно настоящему изобретению, ниже со ссылками на прилагаемые графические материалы в вариантах осуществления настоящего изобретения ясно и в полной мере описаны технические решения согласно вариантам осуществления настоящего изобретения; разумеется, описанные варианты осуществления представляют собой только часть вариантов осуществления настоящего изобретения, а не все варианты осуществления. Все другие варианты осуществления, полученные специалистом в данной области техники на основании вариантов осуществления настоящего изобретения без приложения творческих усилий, должны входить в объем защиты настоящего изобретения.
Следует отметить, что в описании настоящего изобретения, если дополнительно недвусмысленно не определено и не установлено иное, термины «устанавливать», «соединять друг с другом», «соединять» следует понимать в широком значении; например, это может быть жесткое соединение, также может быть разъемное соединение или неразъемное соединение; это может быть механическое соединение, также может быть электрическое соединение или может быть связь с возможностью обмена данными; это может быть непосредственное соединение друг с другом, также может быть опосредованное соединение друг с другом посредством промежуточных средств; это может быть соединение внутри двух элементов или отношение взаимодействия двух элементов. Что касается специалиста в данной области техники, то конкретное значение вышеуказанных терминов в настоящем изобретении ему может быть понятным в зависимости от конкретной ситуации.
Следует отметить, что в описании настоящего изобретения термин «включать» и любые его производные носят включающий, а не исключающий характер. Например, процесс, способ, система, изделие или устройство, в которых предусмотрен ряд этапов или модулей, не ограничиваются представленными этапами или модулями, но в качестве альтернативы в них также предусмотрены этапы или модули, которые не были представлены, или в качестве альтернативы также предусмотрены другие этапы или модули, свойственные этому процессу, способу, изделию или устройству.
Со ссылкой на фиг. 1; на фиг. 1 представлен способ управления запуском и остановкой гибридного транспортного средства согласно вариантам осуществления настоящего изобретения, при этом способ может быть использован в гибридном транспортном средстве 100.
При этом, со ссылкой на фиг. 2, гибридное транспортное средство 100 содержит систему 1 гибридного привода с планетарным рядом, систему 2 управления гибридным транспортным средством, ступицы 3 колес и источник 4 питания. Со ссылкой на фиг. 3; система 1 гибридного привода с планетарным рядом в вариантах осуществления настоящего изобретения представляет собой систему гибридного привода с последовательно-параллельным соединением (например, представляет собой систему электромеханического соединения G-MC), которая снабжена корпусом (на фигурах не показан) и расположенными в корпусе двигателем 11, генератором 12, приводным двигателем 13, планетарным рядом 14, тормозным механизмом 15, механизмом 16 переключения передач и сцепления и дифференциальным механизмом 17.
При этом двигатель 11 представляет собой устройство, которое может преобразовывать энергию, отличную от электрической энергии (например, тепловую энергию и т. д.), в кинетическую энергию; например, может представлять собой бензиновый двигатель или дизельный двигатель. Генератор 12 и приводной двигатель 13 могут представлять собой объединенное оборудование для приведения в действие и выработки электричества, и оно может осуществлять преобразованием между электроэнергией и кинетической энергией. Можно понять, что это гибридное транспортное средство 100 может представлять собой подзаряжаемое транспортное средство с гибридным двигателем или работающее на бензине и электричестве транспортное средство с гибридным двигателем для обеспечения разных режимов работы, например режима исключительно электропривода, режима расширенного диапазона, комбинированного режима мощности и т. п. Можно понять, что в вариантах осуществления настоящего изобретения режим исключительно электропривода означает режим распределения мощности, в котором двигатель 11 и генератор 12 не работают, приводной двигатель 13 приводит в действие гибридное транспортное средство 100 сам и получает электроэнергию посредством источника 4 питания. Режим расширенного диапазона означает режим распределения мощности, в котором приводной двигатель 13 приводит в действие гибридное транспортное средство 100 сам и получает электроэнергию посредством генератора 12 и/или источника 4 питания, при этом двигатель 11 активирует работу генератора 12 для генерирования электроэнергии. Комбинированный режим мощности означает режим распределения мощности, в котором приводной двигатель 13 и двигатель 11 вместе приводят в действие гибридное транспортное средство 100, и приводной двигатель 13 получает электроэнергию посредством генератора 12 и/или источника 4 питания.
Снова со ссылкой на фиг. 3, двигатель 11, генератор 12, приводной двигатель 13, тормозной механизм 15, механизм 16 переключения передач и сцепления и дифференциальный механизм 17 с возможностью сцепления соединены посредством планетарного ряда 14.
В частности, как показано на фиг. 3, планетарный ряд 14 представляет собой планетарную передачу, которая содержит водило 141 планетарной передачи, солнечную шестерню 142, планетарные шестерни 143 и коронную шестерню 144. Солнечная шестерня 142 надета на выходной вал двигателя 11, а коронная шестерня 144 закреплена на выходном вале двигателя 11. Выходной вал двигателя 11 посредством зубчатого колеса 18 соединен с выходным валом генератора 12. Тормозной механизм 15 одним концом соединен с корпусом и одним концом соединен с солнечной шестерней 142. Тормозной механизм 15 может быть использован для торможения или разблокировки солнечной шестерни 142. Когда тормозной механизм 15 тормозит солнечную шестерню 142, солнечная шестерня 142 фиксируется и не может вращаться вокруг выходного вала двигателя 11. Когда тормозной механизм 15 разблокирует солнечную шестерню 142, солнечная шестерня 142 может вращаться вокруг выходного вала двигателя 11. Механизм 16 переключения передач и сцепления одним концом соединен с солнечной шестерней 142, другим концом соединен с коронной шестерней 144. Механизм 16 переключения передач и сцепления может быть использован для соединения или разъединения солнечной шестерни 142 и коронной шестерни 144. Когда механизм 16 переключения передач и сцепления соединяет солнечную шестерню 142 и коронную шестерню 144 друг с другом, солнечная шестерня 142 и коронная шестерня 144 зафиксированы друг с другом. Когда механизм 16 переключения передач и сцепления разъединяет солнечную шестерню 142 и коронную шестерню 144, солнечная шестерня 142 и коронная шестерня 144 отделены друг от друга. Между водилом 141 планетарной передачи и выходным валом приводного двигателя 13 посредством зубчатого колеса 18 обеспечено параллельное соединение, и тем самым они соединены с дифференциальным механизмом 17. Дифференциальный механизм 17 посредством полуоси соединен со ступицей 3 колеса гибридного транспортного средства 100. Можно понять, что, когда такая система 1 гибридного привода с планетарным рядом используется для движения вперед, то ступица 3 колеса, соединенная с дифференциальным механизмом 17, относится к переднему колесу. Кроме того, между двигателем 11 и ступицей 3 колеса также предусмотрена коробка передач (на фигурах не показана); коробка передач может обеспечивать несколько альтернативных положений передачи, например есть положение P, положение N и др.
Снова со ссылкой на фиг. 4, система 2 управления гибридным транспортным средством содержит контроллер 21 всего транспортного средства (Vehicle Control Unit, VCU), контроллер 22 двигателя (Engine Management System, EMS), контроллер 23 генератора и контроллер 24 приводного двигателя. Контроллер 21 всего транспортного средства посредством общей шины локальной сети контроллеров (Controller Area Network, CAN) соединен с контроллером 22 двигателя, контроллером 23 генератора и контроллером 24 приводного двигателя для отправки соответствующих управляющих команд на контроллер 22 двигателя, контроллер 23 генератора и контроллер 24 приводного двигателя.
Например, в вариантах осуществления настоящего изобретения контроллер 21 всего транспортного средства может на основании требований к езде водителя гибридного транспортного средства 100 и на основании состояния гибридного транспортного средства (например, скорости движения транспортного средства, оставшегося электрического заряда источника 4 питания и т. д.) автоматически решать, требуются ли или нет запуск/выключение двигателя 11. Когда контроллер 21 всего транспортного средства определяет, что нужен запуск двигателя 11, контроллер 21 всего транспортного средства отправляет на контроллер 22 двигателя команду запуска. Когда контроллер 21 всего транспортного средства определяет, что нужно выключить двигатель 11, контроллер 21 всего транспортного средства отправляет на контроллер 22 двигателя команду остановки. При запуске двигателя и/или остановке двигателя контроллер 21 всего транспортного средства также может отправлять на контроллер 23 генератора команду перемещения и отправлять на контроллер 24 приводного двигателя команду компенсации.
Контроллер 22 двигателя соединен с двигателем 11 и управляет работой двигателя 11. Например, в вариантах осуществления настоящего изобретения контроллер 22 двигателя может на основании команды запуска управлять двигателем 11 для выполнения запуска и на основании команды остановки управлять двигателем 11 для выполнения остановки.
Контроллер 23 генератора соединен с генератором 12 и управляет работой генератора 12. Например, в вариантах осуществления настоящего изобретения контроллер 23 генератора может на основании команды перемещения управлять генератором 12 для приложения к двигателю 11 соответствующего крутящего момента перемещения.
Контроллер 24 приводного двигателя соединен с приводным двигателем 13 и управляет работой приводного двигателя 13. Например, в вариантах осуществления настоящего изобретения контроллер 24 приводного двигателя может на основании команды компенсации управлять приводным двигателем 13 для вывода соответствующего компенсирующего крутящего момента.
Можно понять, что в гибридном транспортном средстве 100 при запуске двигателя 11 легко возникает тряска, причины которой могут заключаться в следующем: (1) скорость вращения запуска двигателя 11 заметно ниже, чем нормальная рабочая скорость вращения, и стабильность процесса всасывания в цилиндрах относительно плохая, и горение внутри цилиндров подвержено влиянию температуры, воздушного потока и т. п.; среда горения также сравнительно плохая, что приводит к тому, что процесс запуска двигателя 11 менее стабилен, чем нормальный процесс работы, и колебания крутящего момента и скорости вращения при запуске являются большими. (2) Двигатель 11 испытывает процесс быстрого изменения скорости вращения из статического состояния в динамическое, от низкой скорости вращения к высокой скорости вращения, и поскольку фрикционный крутящий момент двигателя 11 со скоростью вращения изменяется нелинейно, то в гибридном транспортном средстве 100 трудно обеспечить точный крутящий момент перемещения для преодоления фрикционного крутящего момента двигателя. (3) После сцепления валов двигателя 11 и системы коробки передач в процессе запуска часто имеет место интервал низких скоростей вращения (то есть от скорости вращения 0 до скорости вращения, когда начинается зажигание), при этом возникает резонансная полоса; когда двигатель 11 проходит резонансную полосу, возникает резонанс, и получаемая в результате тряска усиливается. (4) В гибридном транспортном средстве 100 имеется передаваемый в продольном направлении крутящий момент, который передается на ступицу 3 колеса. При выключении двигателя 11 также имеются факторы тряски, изложенные выше в (2)–(4).
На основании этого в гибридном транспортном средстве 100 применяются способ управления запуском и остановкой гибридного транспортного средства, как показано на фиг. 1, при этом при запуске и/или остановке путем точного управления приводным двигателем 13 выводят компенсирующий крутящий момент так, чтобы компенсирующий крутящий момент и передаваемый в продольном направлении крутящий момент взаимно нейтрализовались, тем самым решая проблему продольной тряски двигателя 11 в процессе запуска и/или остановки, так что обеспечивается возможность плавного и быстрого запуска и/или остановки двигателя 11.
Можно понять, что показанный на фиг. 1 способ управления запуском и остановкой гибридного транспортного средства включает два аспекта: управление запуском и управление остановкой. При этом, как показано на фиг. 1, способ управления запуском гибридного транспортного средства включает следующие этапы, на которых:
рассчитывают передаваемый в продольном направлении крутящий момент планетарного ряда 14.
На основании передаваемого в продольном направлении крутящего момента рассчитывают компенсирующий крутящий момент, который должен выводить приводной двигатель 13.
Приводным двигателем 13 управляют для вывода компенсирующего крутящего момента с передачей компенсирующего крутящего момента на ступицу 3 колеса, чем нейтрализуют передаваемый в продольном направлении крутящий момент.
Можно понять, что перед расчетом передаваемого в продольном направлении крутящего момента способ управления запуском гибридного транспортного средства дополнительно может включать этап, на котором управляют запуском двигателя 11.
В частности, контроллер 21 всего транспортного средства определяет, нужен ли или нет запуск двигателя 11, и если определяет, что запуск двигателя 11 нужен, то контроллер 21 всего транспортного средства отправляет на контроллер 22 двигателя команду запуска. Контроллер 22 двигателя на основании команды запуска управляет двигателем 11 для начала запуска.
При этом контроллер 21 всего транспортного средства может в ходе всего процесса запуска продолжать отправлять на контроллер 22 двигателя команду запуска для предотвращения возникновения ситуации, когда двигатель 11 не запускается. Когда двигатель 11 успешно запущен, контроллер 22 двигателя также может возвращать на контроллер 21 всего транспортного средства сигнал успешного запуска. Таким образом, после того как контроллер 21 всего транспортного средства принял сигнал успешного запуска, он больше не отправляет команду запуска на контроллер 22 двигателя.
В вариантах осуществления настоящего изобретения контроллер 21 всего транспортного средства может управлять двигателем 11 для запуска в положении N, не заставляя его запускаться в положении P.
В вариантах осуществления настоящего изобретения процесс расчета вышеуказанного передаваемого в продольном направлении крутящего момента, в частности, включает следующие этапы, на которых:
измеряют скорость вращения генератора 12.
На основании скорости вращения генератора 12 и момента инерции системы валов рассчитывают передаваемый в продольном направлении крутящий момент.
В частности, контроллер 21 всего транспортного средства может посредством датчика гибридного транспортного средства 100 измерять скорость вращения генератора 12, затем на основании скорости вращения генератора 12 рассчитывать угловое ускорение коронной шестерни 144 и на основании углового ускорения коронной шестерни 144 и момента инерции системы валов рассчитывать передаваемый в продольном направлении крутящий момент. При расчете углового ускорения коронной шестерни 144 также может применяться алгоритм фильтрации (например, алгоритм фильтрации средней величины) для удаления аномальных данных с получением более точного углового ускорения коронной шестерни 144.
В вариантах осуществления настоящего изобретения вышеуказанный компенсирующий крутящий момент можно рассчитывать посредством расчетной формулы компенсирующего крутящего момента. Эта расчетная формула компенсирующего крутящего момента является следующей:
,
при этом в формуле представляет собой компенсирующий крутящий момент; представляет собой передаточное отношение между водилом 141 планетарного ряда и приводным двигателем 13 в планетарном ряде 14; представляет собой характерный параметр планетарного ряда 14, то есть представляет собой передаточное отношение планетарного ряда 14; представляет собой момент перемещения генератора 12; представляет собой фрикционный крутящий момент двигателя 11 при текущей скорости вращения; представляет собой момент перемещения коробки передач в гибридном транспортном средстве 100; представляет собой передаваемый в продольном направлении крутящий момент; представляет собой момент инерции коронной шестерни 144, эквивалентный планетарному ряду 14, в системе 1 гибридного привода с планетарным рядом, то есть представляет собой момент инерции системы валов; представляет собой угловое ускорение, эквивалентное коронной шестерне 144 в системе 1 гибридного привода с планетарным рядом.
Можно понять, что известен заранее, может быть рассчитан на основании передаточного отношения между планетарным рядом 14 в системе 1 гибридного привода с планетарным рядом и остальной системой валов и предварительно сохранен в элементе памяти контроллера 21 всего транспортного средства. , и могут быть получены посредством стендовых испытаний и предварительно сохранены в элементе памяти контроллера 21 всего транспортного средства. Можно понять, что направление передаваемого в продольном направлении крутящего момента противоположно компенсирующему крутящему моменту . Например, когда передаваемый в продольном направлении крутящий момент является положительным, компенсирующий крутящий момент является отрицательным. Таким образом, передаваемый в продольном направлении крутящий момент может быть компенсирован только компенсирующим крутящим моментом .
Таким образом, контроллер 21 всего транспортного средства может на основании точно рассчитанного компенсирующего крутящего момента создавать соответствующую команду компенсации и отправлять команду компенсации на контроллер 24 приводного двигателя; контроллер 24 приводного двигателя, таким образом, может на основании команды компенсации управлять приводным двигателем 13 для выведения необходимого для процесса запуска компенсирующего крутящего момента (например, 0-го крутящего момента, пикового значения компенсирующего крутящего момента и поддерживающего компенсирующего крутящего момента).
Снова со ссылкой на фиг. 5, в вариантах осуществления настоящего изобретения вышеуказанный процесс запуска, в частности, включает следующие этапы, на которых:
этап a: процесс запуска двигателя 11 последовательно делят на несколько фаз запуска.
В частности, контроллер 21 всего транспортного средства посредством датчика гибридного транспортного средства 100 в реальном времени измеряет скорость вращения двигателя 11 и на основании программы внутреннего счетчика времени контроллера 21 всего транспортного средства измеряет длительность запуска. Затем на основании скорости вращения двигателя 11 и измеренной длительности запуска устанавливают фазу запуска, на которой находится двигатель 11. Например, как показано на фиг. 7, процесс запуска включает последовательно разделенные фазу предварительной нагрузки, фазу пикового перемещения, фазу перемещения и удержания и фазу ослабления крутящего момента и запуска.
При этом контроллер 21 всего транспортного средства устанавливает процесс, в котором двигатель 11 принимает команду запуска, пока двигатель 11 не начнет вращаться, и мгновенно и резко происходит переход от 0-й скорости вращения к скорости вращения, которая больше 0, в качестве фазы предварительной нагрузки, устанавливает процесс, в котором скорость вращения двигателя 11 от 0 увеличивается до конечной точки резонансной полосы, в качестве фазы пикового перемещения; устанавливает процесс, в котором скорость вращения двигателя 11 увеличивается от конечной точки резонансной полосы до точки начала зажигания, в качестве фазы перемещения и удержания; устанавливает процесс, в котором скорость вращения двигателя 11 увеличивается от точки начала зажигания до точки стабильного вращения, и процесс, происходящий от достижения точки стабильного вращения до успешного запуска двигателя 11, в качестве фазы ослабления крутящего момента и запуска.
Можно понять, что резонансная полоса означает интервал низких скоростей вращения, в котором легко возникает резонанс в процессе изменения скорости вращения двигателя 11. Конечная точка резонансной полосы, точка начала зажигания и точка стабильного вращения представляют собой пороговые значения скорости вращения двигателя 11. При этом конечная точка резонансной полосы означает скорость вращения, когда двигатель 11 выходит из резонансной полосы. Точка начала зажигания означает скорость вращения двигателя 11 при начале зажигания; точка стабильного вращения означает, что начало горения в цилиндрах внутри двигателя 11 находится в стабильном состоянии, то есть имеет место стабильное зажигание, что делает возможной скорость вращения, при которой выводимый двигателем крутящий момент является стабильным.
Можно понять, что конечная точка резонансной полосы, точка начала зажигания, точка стабильного вращения и длительность всех фаз могут быть предварительно определены и записаны в элементе памяти контроллера 21 всего транспортного средства. Разумеется, конечная точка резонансной полосы, точка начала зажигания, точка стабильного вращения и длительность всех фаз могут быть оптимально определены на основании фактических показателей гибридного транспортного средства 100.
На основании этого, при запуске контроллер 21 всего транспортного средства может на основании измеренной в реальном времени скорости вращения двигателя 11 определять, начал ли или нет двигатель 11 вращаться (то есть имеется ли или нет мгновенный и резкий переход от 0 к значению, которое больше 0), достигла ли или нет скорость вращения двигателя 11 конечной точки резонансной полосы, точки начала зажигания или точки стабильного вращения и как долго он запущен, для установления того, на какой фазе запуска он находится в текущий момент. Контроллер 21 всего транспортного средства может на основании рабочего состояния зажигания определять, запущен ли или нет двигатель 11.
Этап b: при разных фазах запуска соответственно управляют приводным двигателем 13 для вывода компенсирующего крутящего момента, соответствующего фазе запуска, в которой находится двигатель 11.
В частности, со ссылкой на фиг. 7, на фиг. 7 представлена диаграмма последовательности запуска двигателя 11 гибридного транспортного средства 100 с помощью способа управления запуском согласно вариантам осуществления настоящего изобретения. При этом абсцисса представляет собой время, ордината представляет собой связанные сигналы и параметры, вовлеченные в процесс запуска, например: сигнал успешного запуска, команду запуска, крутящий момент, выводимый двигателем 11, скорость вращения двигателя 11 и компенсирующий крутящий момент приводного двигателя. На фиг. 7 команда запуска, представленная как 1, говорит о том, что контроллер 21 всего транспортного средства отправил команду запуска для осуществления запуска двигателя 11. Если команда запуска представлена как 0, это говорит о том, что контроллер 21 всего транспортного средства не отправлял команду запуска.
Как показано на фиг. 7, процесс на этапе b, в частности, следующий:
В фазе предварительной нагрузки, поскольку фаза предварительной нагрузки представляет собой процесс, в котором в отношении зубчатых колес системы валов, соединяющей двигатель 11 с генератором 12, применяется предварительная нагрузка для уменьшения промежутков между зубчатыми колесами системы валов, то в этом процессе двигатель 11 еще не вращается, поэтому приводной двигатель 13 не выводит компенсирующий крутящий момент, то есть компенсирующий крутящий момент, выводимый, когда контроллер 24 приводного двигателя управляет приводным двигателем 13, составляет 0.
Когда двигатель 11 начинает вращаться и происходит резкий переход от 0-й скорости вращения к скорости вращения, которая больше 0 (соответствует точке A на фиг. 7), то считается, что предварительная нагрузка завершена. Поэтому, после того как контроллер 21 всего транспортного средства посредством датчика и программы внутреннего счетчика времени определяет, что установленная длительность предварительной нагрузки прошла, и скорость вращения двигателя 11 от 0 резко стала больше 0, то он определяет, что осуществлен переход к фазе пикового перемещения. В фазе пикового перемещения контроллер 24 приводного двигателя на основании команды компенсации управляет приводным двигателем 13 для вывода пикового компенсирующего крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента, который планетарный ряд 14 в фазе пикового перемещения передает на ступицу 3 колеса.
Когда контроллер 21 всего транспортного средства посредством датчика определяет, что скорость вращения двигателя 11 достигла конечной точки резонансной полосы (соответствует точке B на фиг. 7), то он определяет, что осуществлен переход к фазе перемещения и удержания.
В фазе перемещения и удержания контроллер 24 приводного двигателя управляет приводным двигателем 13 для вывода поддерживающего компенсирующего крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе перемещения и удержания.
Когда контроллер 21 всего транспортного средства посредством датчика определяет, что скорость вращения двигателя 11 достигла точки начала зажигания (соответствует точке C на фиг. 7), то он определяет, что осуществлен переход к фазе ослабления крутящего момента и запуска.
В фазе ослабления крутящего момента и запуска контроллер 24 приводного двигателя управляет приводным двигателем 13 для продолжения вывода поддерживающего компенсирующего крутящего момента, при этом после успешного запуска двигателя 11 устраняют поддерживающий компенсирующий крутящий момент с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе ослабления крутящего момента и запуска.
В вышеуказанном процессе запуска, поскольку резонансная полоса легко усиливает продольную тряску всего транспортного средства, то, как показано на фиг. 6, при управлении запуском двигателя 11 способ управления запуском гибридного транспортного средства согласно вариантам осуществления настоящего изобретения дополнительно включает этап c, на котором:
управляют генератором 12 для приложения к двигателю 11 крутящего момента перемещения для управления скоростью вращения двигателя 11.
Таким образом, двигатель 11 может быстро проходить резонансную полосу, чем уменьшается вызванная резонансной полосой тряска и дополнительно улучшается плавность запуска двигателя 11.
Можно понять, что вышеуказанный «этап c» предназначен только для разделения других этапов, и настоящее изобретение вовсе не ограничивается последовательностью с этапом c в способе согласно вариантам осуществления настоящего изобретения.
Можно понять, что, поскольку процесс запуска двигателя 11 включает несколько фаз запуска, то этап c в способе управления запуском согласно вариантам осуществления настоящего изобретения может, в частности, быть следующим: при разных фазах запуска соответственно управляют генератором 12 для вывода крутящего момента перемещения, соответствующего фазе запуска, в которой находится двигатель 11.
Можно понять, что крутящий момент перемещения, необходимый в каждой фазе запуска (например, крутящий момент при предварительной нагрузке, пиковый крутящий момент перемещения и поддерживающий крутящий момент), и скорость изменения крутящего момента перемещения можно предварительно определить и записать в элемент памяти контроллера 21 всего транспортного средства. При определении оптимальный выбор может быть сделан на основании фактических показателей гибридного транспортного средства 100.
На основании этого во всех фазах запуска контроллер 21 всего транспортного средства может на основании предварительно определенных крутящего момента перемещения и скорости изменения крутящего момента перемещения создавать соответствующую команду перемещения и отправлять команду перемещения на контроллер 23 генератора. Этим обеспечивается возможность того, что контроллер 23 генератора может на основании определенной скорости изменения крутящего момента перемещения управлять процессом перехода между соседними двумя фазами запуска и управлять генератором 12 с достижением определенного крутящего момента перемещения, и, таким образом, может осуществляться точное управление процессом запуска.
В частности, снова со ссылкой на фиг. 7, в фазе предварительной нагрузки контроллер 23 генератора на основании команды откладывания запуска управляет генератором 12 для вывода крутящего момента при предварительной нагрузке, при этом крутящий момент при предварительной нагрузке применяют к двигателю 11 с обеспечением предварительной нагрузки в отношении зубчатых колес системы валов, соединяющей двигатель 11 с генератором 12. При этом выводимый генератором 12 крутящий момент на основании установленной скорости изменения (соответствует угловому коэффициенту T1 на фиг. 7) переходит от 0 Н·м к установленному крутящему моменту при предварительной нагрузке.
В фазе пикового перемещения контроллер 23 генератора на основании команды перемещения управляет генератором 12 для применения к двигателю 11 пикового крутящего момента перемещения с проведением двигателя 11 через резонансную полосу. При этом выводимый генератором 12 крутящий момент на основании установленной скорости изменения (соответствует угловому коэффициенту T2 на фиг. 7) от крутящего момента при предварительной нагрузке переходит к установленному пиковому крутящему моменту перемещения.
В фазе перемещения и удержания контроллер 23 генератора на основании команды перемещения управляет генератором 12 для применения к двигателю 11 поддерживающего крутящего момента с обеспечением начала зажигания в цилиндрах внутри двигателя 11. При этом выводимый генератором 12 крутящий момент на основании установленной скорости изменения (соответствует угловому коэффициенту T3 на фиг. 7) от пикового крутящего момента перемещения переходит к установленному поддерживающему крутящему моменту.
В фазе ослабления крутящего момента и запуска контроллер 23 генератора на основании команды перемещения управляет генератором 12 для устранения применяемого к двигателю 11 крутящего момента с обеспечением завершения зажигания в цилиндрах внутри двигателя 11 и успешного запуска. При этом выводимый генератором 12 крутящий момент на основании установленной скорости изменения (соответствует угловому коэффициенту T4 на фиг. 7) от поддерживающего крутящего момента переходит к 0 Н·м. Когда в генераторе 12 крутящий момент устраняется, скорость вращения двигателя 11 достигает установленной точки стабильного вращения (соответствует точке D на фиг. 7).
Можно понять, что в существующих основных способах управления запуском, по сравнению с традиционными транспортными средствами на топливе, поскольку при запуске двигателя 11 транспортное средство находится в состоянии покоя и муфта сцепления отсоединена, то двигатель 11 и ступица 3 колеса полностью отделены друг от друга, при этом транспортное средство на топливе снабжено гидравлическим преобразователем крутящего момента, который может эффективно поглощать колебания момента силы при запуске двигателя 11, поэтому запуск двигателя 11 не будет влиять на ступицу 3 колеса. Что касается гибридного транспортного средства, которое снабжено типом системы электромеханического соединения без планетарного ряда, то, поскольку в системе электромеханического соединения без планетарного ряда 14 при запуске совсем нет передачи инерционного крутящего момента системы планетарных зубчатых колес, то в таком гибридном транспортном средстве не нужно применять компенсацию передаваемого в продольном направлении крутящего момента, который может иметь место.
Что касается гибридного транспортного средства с планетарным рядом, то наиболее типичным примером является гибридное транспортное средство, в котором применяется система гибридного привода с разделением потока мощности (также система THS); в таком гибридном транспортном средстве применяется запуск из положения P и запуск с нейтрализацией передаваемого в продольном направлении крутящего момента, передаваемого на ступицу 3 колеса, на пропорциональной основе. Это обусловлено тем, что передаваемый в продольном направлении крутящий момент системы THS сравнительно большой, может быть рассчитан непосредственно на основании фиксированной доли; кроме того при запуске в положении P система передачи в положении P находится в режиме блокировки, поэтому инерционный крутящий момент может быть непосредственно нейтрализован в положении P, ввиду чего гибридное транспортное средство с системой THS не чувствительно к инерционному крутящему моменту, поэтому при запуске в положении P можно не применять точный расчет инерционного крутящего момента и не применять компенсацию. Однако, когда в таком гибридном транспортном средстве выбран запуск в положении N, передаваемый в продольном направлении крутящий момент является более заметным; в этой ситуации больше невозможно на пропорциональной основе полностью нейтрализовать передаваемый в продольном направлении крутящий момент при запуске в положении N, поэтому такое гибридное транспортное средство невозможно плавно запустить в положении N, и может быть выбран только запуск в положении P.
Что же касается настоящего изобретения, то благодаря применению в гибридном транспортном средстве 100 системы гибридного привода с последовательно-параллельным соединением, содержащей планетарный ряд 14, конструкция системы гибридного привода с последовательно-параллельным соединением отличается от системы THS, и при запуске в положении N передаваемый в продольном направлении крутящий момент будет значительно уменьшаться; передаваемый в продольном направлении крутящий момент в основном представляет собой инерционный крутящий момент от ускорения системы планетарных зубчатых колес, ввиду чего согласно настоящему изобретению с помощью вышеуказанного способа управления запуском рационально управляют передаваемым в продольном направлении крутящим моментом, чем обеспечивается возможность плавного запуска гибридного транспортного средства 100, и может осуществляться запуск в положении N без необходимости в принудительном запуске в положении P. Кроме того, согласно настоящему изобретению при запуске гибридного транспортного средства 100 также посредством генератора 12 прикладывают активную силу перемещения (также крутящий момент перемещения) для содействия быстрому прохождению двигателем 11 резонансной полосы, чем может уменьшаться вызываемая резонансной полосой тряска и сокращаться время прохождения резонансной полосы, и дополнительно повышаются плавность и эффективность запуска гибридного транспортного средства 100 согласно настоящему изобретению.
Снова со ссылкой на фиг. 1, в вариантах осуществления настоящего изобретения способ управления остановкой гибридного транспортного средства является аналогичным или подобным способу управления запуском гибридного транспортного средства. Способ управления остановкой гибридного транспортного средства отличается от способа управления запуском гибридного транспортного средства тем, что этапу a и этапу b в процессе запуска в процессе остановки соответствуют следующие этап d и этап e, на которых:
этап d: процесс остановки двигателя последовательно делят на несколько фаз остановки.
Этап e: при разных фазах остановки соответственно управляют приводным двигателем 13 для вывода компенсирующего крутящего момента, соответствующего фазе остановки, в которой находится двигатель 11, как показано на фиг. 8.
Например, процесс остановки двигателя включает последовательно разделенные фазу быстрого перемещения, фазу постепенного уменьшения крутящего момента и фазу ослабления крутящего момента и остановки. При этом контроллер 21 всего транспортного средства устанавливает процесс, в котором скорость вращения двигателя 11 снижается от скорости вращения перед остановкой до конечной точки резонансной полосы, в качестве фазы быстрого перемещения; устанавливает процесс, в котором скорость вращения двигателя 11 от конечной точки резонансной полосы снижается до 0, в качестве фазы постепенного уменьшения крутящего момента; устанавливает процесс, в котором двигатель 11 после снижения до 0-й скорости вращения полностью останавливается, в качестве фазы ослабления крутящего момента и остановки.
В частности, со ссылкой на фиг. 9, на фиг. 9 представлена диаграмма последовательности выключения двигателя 11 гибридного транспортного средства 100 с помощью способа управления остановкой гибридного транспортного средства согласно вариантам осуществления настоящего изобретения. При этом абсцисса представляет собой время, ордината представляет собой связанные сигналы и параметры, вовлеченные в процесс остановки, например: команду остановки, крутящий момент, выводимый двигателем 11, скорость вращения двигателя 11 и компенсирующий крутящий момент приводного двигателя 13. На фиг. 9 команда остановки, представленная как 1, говорит о том, что контроллер 21 всего транспортного средства отправил команду остановки для остановки двигателя 11; а команда остановки, представленная как 0, говорит о том, что контроллер 21 всего транспортного средства не отправлял команду остановки.
Как показано на фиг. 9, процесс на этапе e, в частности, следующий:
в фазе быстрого перемещения контроллер 24 приводного двигателя на основании команды компенсации управляет приводным двигателем 13 для вывода компенсирующего крутящего момента перемещения с нейтрализацией передаваемого в продольном направлении крутящего момента, который планетарный ряд 14 в фазе быстрого перемещения передает на ступицу 3 колеса.
Когда контроллер 21 всего транспортного средства посредством датчика определяет, что скорость вращения двигателя 11 достигла конечной точки резонансной полосы (соответствует точке E на фиг. 9), то он определяет переход к фазе постепенного уменьшения крутящего момента.
В фазе постепенного уменьшения крутящего момента контроллер 24 приводного двигателя на основании команды компенсации управляет приводным двигателем 13 для вывода компенсирующего крутящего момента перемещения с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе постепенного уменьшения крутящего момента.
Когда контроллер 21 всего транспортного средства посредством датчика определяет, что скорость вращения двигателя 11 снизилась до 0 об/мин, он определяет переход к фазе ослабления крутящего момента и остановки.
В фазе ослабления крутящего момента и остановки контроллер 24 приводного двигателя на основании команды компенсации управляет приводным двигателем 13 для вывода компенсирующего крутящего момента для ослабления крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе ослабления крутящего момента и остановки.
Аналогично или подобно процессу запуска способ управления запуском гибридного транспортного средства согласно вариантам осуществления настоящего изобретения также включает этап c, как видно на фиг. 6.
В частности, как показано на фиг. 9, в фазе быстрого перемещения контроллер 23 генератора на основании команды перемещения управляет генератором 12 для применения к двигателю 11 крутящего момента быстрого перемещения с проведением двигателя 11 для преодоления резонансной полосы. При этом выводимый генератором 12 крутящий момент на основании установленной скорости изменения (соответствует угловому коэффициенту T5 и угловому коэффициенту T6 на фиг. 9) от крутящего момента перед остановкой двигателя переходит к установленному крутящему моменту быстрого перемещения.
Можно понять, что, когда генератор 12 перед остановкой находится в режиме генерирования электричества, то крутящий момент генератора 12 является отрицательным; когда генератор 12 перед остановкой не находится в рабочем режиме, то крутящий момент генератора 12 составляет 0 Н⋅м. Поскольку в фазе быстрого перемещения необходимо, чтобы генератор 12 выводил крутящий момент быстрого перемещения, то показанный на фиг. 9 выводимый генератором 12 крутящий момент сначала резко увеличивают, а потом медленно снижают, и, таким образом можно посредством сравнительно большого крутящего момента переводить двигатель 11, сокращая время прохождения резонансной полосы.
В фазе постепенного уменьшения крутящего момента контроллер 23 генератора на основании команды перемещения управляет генератором 12 для применения к двигателю 11 крутящего момента, который на основании установленной скорости изменения (соответствует угловому коэффициенту T7 фиг. 9) переходит от крутящего момента быстрой остановки к 0 Н⋅м, что заставляет двигатель 11 остановиться.
В фазе ослабления крутящего момента и остановки контроллер 23 генератора на основании команды перемещения управляет генератором 12 для устранения применяемого к двигателю 11 крутящего момента.
Можно понять, что, аналогично процессу запуска, в системе 1 гибридного привода с планетарным рядом во время остановки также имеет место проблема передачи передаваемого в продольном направлении момента силы и возникновения продольной тряски. Тем не менее в существующих основных способах управления остановкой на двигатель 11 отправляют команду остановки и устраняют крутящие моменты двигателя 11 и генератора 12, так что скорость вращения двигателя 11 и генератора 12 естественным путем снижается до 0, но при это не учитывается влияние передаваемого в продольном направлении момента силы. В то же время согласно настоящему изобретению с помощью вышеуказанного способа управления остановкой осуществляют точное управление передаваемым в продольном направлении крутящим моментом, чем обеспечивают то, что гибридное транспортное средство 100 может плавно останавливать двигатель. Кроме того, согласно настоящему изобретению при остановке также активно откладывают запуск двигателя 11 для быстрого прохождения резонансной полосы, чем можно уменьшать вызываемую резонансной полосой тряску и уменьшать время прохождения резонансной полосы, дополнительно повышать плавность при остановке и можно сократить время остановки.
В отношении вышеуказанных вариантов осуществления способа следует отметить то, что для упрощения описания они описаны как комбинация из ряда действий, но специалисты в данной области техники должны понимать, что настоящее изобретение вовсе не ограничивается описанными последовательностями действий, поскольку согласно настоящему изобретению некоторые этапы могут быть выполнены в другой последовательности или одновременно.
В рассмотренном выше вышеуказанные варианты осуществления предназначены только для описания технических решений согласно настоящему изобретению и не ограничивают его; несмотря на то что настоящее изобретение было подробно описано с помощью вышеуказанных вариантов осуществления, специалистам в данной области техники следует понимать, что они по-прежнему могут вносить изменения в технические решения, представленные в вышеуказанных вариантах осуществления, или заменять часть технических признаков в них эквивалентами; и эти изменения или замены не приведут к отклонению сути соответствующих технических решений от объема технических решений в вариантах осуществления настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ НА ЧЕТЫРЕ КОЛЕСА | 2018 |
|
RU2693778C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2619144C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668448C2 |
| СИСТЕМА ПЕРЕДАЧИ МОЩНОСТИ | 2017 |
|
RU2651953C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2659151C2 |
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА ДЛЯ РАБОЧЕЙ МАШИНЫ | 2006 |
|
RU2394701C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2568530C2 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СИЛОВАЯ УСТАНОВКА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2679755C2 |
| СПОСОБ (ВАРИАНТЫ) УПРАВЛЕНИЯ СИСТЕМОЙ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2684140C2 |
Изобретение относится к гибридным транспортным средствам. Способ управления запуском/остановкой гибридного транспортного средства, содержащего двигатель, приводной электродвигатель и планетарный ряд, включает обеспечение команды запуска/остановки двигателя; измерение скорости вращения двигателя; определение фазы запуска/остановки, в которой находится двигатель; расчет передаваемого в продольном направлении крутящего момента планетарного ряда. Также есть расчет компенсирующего крутящего момента, который следует выводить приводному электродвигателю, на основании передаваемого в продольном направлении крутящего момента от двигателя. Далее идет управление приводным электродвигателем для вывода компенсирующего крутящего момента с передачей компенсирующего крутящего момента на ступицу колеса для нейтрализации передаваемого двигателем в продольном направлении крутящего момента в соответствии с фазой запуска. Решается проблема продольной тряски транспортного средства при запуске и остановке. 2 н. и 12 з.п. ф-лы, 9 ил.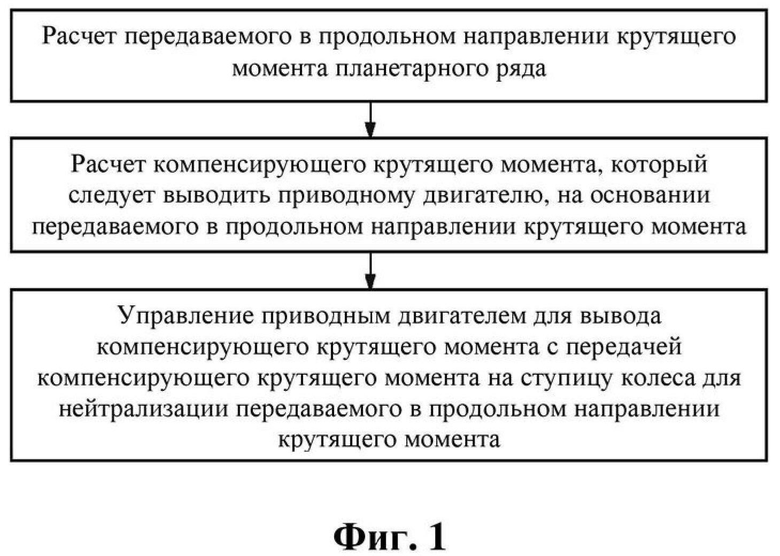
1. Способ управления запуском гибридного транспортного средства, содержащего двигатель, приводной электродвигатель и планетарный ряд, отличающийся тем, что включает следующие этапы:
обеспечение команды запуска двигателя;
измерение скорости вращения двигателя;
определение фазы запуска, в которой находится двигатель;
расчет передаваемого в продольном направлении крутящего момента планетарного ряда;
расчет компенсирующего крутящего момента, который следует выводить приводному электродвигателю, на основании передаваемого в продольном направлении крутящего момента от двигателя;
управление приводным электродвигателем для вывода компенсирующего крутящего момента с передачей компенсирующего крутящего момента на ступицу колеса для нейтрализации передаваемого двигателем в продольном направлении крутящего момента в соответствии с фазой запуска.
2. Способ управления запуском гибридного транспортного средства по п. 1, отличающийся тем, что дополнительно включает:
управление запуском двигателя;
управление генератором для приложения к двигателю крутящего момента перемещения для управления скоростью вращения двигателя.
3. Способ управления запуском гибридного транспортного средства по п. 2, отличающийся тем, что расчет передаваемого в продольном направлении крутящего момента планетарного ряда включает:
измерение скорости вращения генератора;
расчет передаваемого в продольном направлении крутящего момента на основании скорости вращения генератора и момента инерции системы валов.
4. Способ управления запуском гибридного транспортного средства по п. 2, отличающийся тем, что расчетная формула компенсирующего крутящего момента является следующей:
 ,
,
при этом TDM представляет собой компенсирующий крутящий момент;  представляет собой передаточное отношение между водилом планетарной передачи и приводным электродвигателем в планетарном ряде; k представляет собой характеристический параметр планетарного ряда; Tgen представляет собой крутящий момент перемещения генератора; Tf_ice представляет собой фрикционный крутящий момент двигателя при текущей скорости вращения; Tf_tr представляет собой крутящий момент перемещения коробки передач в гибридном транспортном средстве; Jrαr представляет собой передаваемый в продольном направлении крутящий момент; Jr представляет собой момент инерции коронной шестерни, эквивалентный планетарному ряду, в системе гибридного привода с планетарным рядом, то есть представляет собой момент инерции системы валов; αr представляет собой угловое ускорение, эквивалентное коронной шестерне в системе гибридного привода с планетарным рядом.
представляет собой передаточное отношение между водилом планетарной передачи и приводным электродвигателем в планетарном ряде; k представляет собой характеристический параметр планетарного ряда; Tgen представляет собой крутящий момент перемещения генератора; Tf_ice представляет собой фрикционный крутящий момент двигателя при текущей скорости вращения; Tf_tr представляет собой крутящий момент перемещения коробки передач в гибридном транспортном средстве; Jrαr представляет собой передаваемый в продольном направлении крутящий момент; Jr представляет собой момент инерции коронной шестерни, эквивалентный планетарному ряду, в системе гибридного привода с планетарным рядом, то есть представляет собой момент инерции системы валов; αr представляет собой угловое ускорение, эквивалентное коронной шестерне в системе гибридного привода с планетарным рядом.
5. Способ управления запуском гибридного транспортного средства по п. 2, отличающийся тем, что управление приводным электродвигателем для вывода компенсирующего крутящего момента включает следующие этапы:
разделение процесса запуска двигателя последовательно на несколько фаз запуска;
при разных фазах запуска соответственно управление приводным электродвигателем для вывода компенсирующего крутящего момента, соответствующего фазе запуска, в которой находится двигатель.
6. Способ управления запуском гибридного транспортного средства по п. 5, отличающийся тем, что процесс запуска включает последовательно разделенные фазу предварительной нагрузки, фазу пикового перемещения, фазу перемещения и удержания и фазу ослабления крутящего момента и запуска; при этом
в фазе предварительной нагрузки приводным электродвигателем управляют для обеспечения отсутствия вывода компенсирующего крутящего момента;
в фазе пикового перемещения приводным электродвигателем управляют для вывода пикового компенсирующего крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе пикового перемещения;
в фазе перемещения и удержания приводным электродвигателем управляют для вывода поддерживающего компенсирующего крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе перемещения и удержания;
в фазе ослабления крутящего момента и запуска приводным электродвигателем управляют для продолжения вывода поддерживающего компенсирующего крутящего момента, затем после успешного запуска двигателя поддерживающий компенсирующий крутящий момент устраняют с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе ослабления крутящего момента и запуска.
7. Способ управления запуском гибридного транспортного средства по п. 5, отличающийся тем, что последовательное разделение процесса запуска двигателя на несколько фаз запуска включает следующие этапы:
измерение в реальном времени скорости вращения двигателя и измерение длительности запуска;
установление фазы запуска, в которой находится двигатель, на основании скорости вращения двигателя и измеренной длительности запуска;
при этом процесс с момента приема двигателем команды запуска до резкого изменения значения скорости вращения двигателя от 0 до значения, которое больше 0, устанавливают в качестве фазы предварительной нагрузки;
процесс, в котором происходит увеличение скорости вращения двигателя от 0 до конечной точки резонансной полосы, устанавливают в качестве фазы пикового перемещения;
процесс, в котором происходит увеличение скорости вращения двигателя от конечной точки резонансной полосы до точки начала зажигания, устанавливают в качестве фазы перемещения и удержания, при этом точка начала зажигания представляет собой скорость вращения двигателя при начале зажигания;
процесс, в котором происходит увеличение скорости вращения двигателя от точки начала зажигания до точки стабильного вращения, и процесс, происходящий от достижения точки стабильного вращения до успешного запуска двигателя, устанавливают в качестве фазы ослабления крутящего момента и запуска, при этом точка стабильного вращения представляет собой скорость вращения, при которой происходит стабильное зажигание двигателя с обеспечением вывода двигателем стабильного крутящего момента.
8. Способ управления остановкой гибридного транспортного средства, содержащего двигатель, приводной электродвигатель и планетарный ряд, отличающийся тем, что включает:
обеспечение команды остановки двигателя;
определение скорости вращения двигателя;
определение фазы остановки, в которой находится двигатель;
расчет передаваемого в продольном направлении крутящего момента планетарного ряда;
расчет компенсирующего крутящего момента, который следует выводить приводному электродвигателю, на основании передаваемого в продольном направлении крутящего момента от двигателя;
управление приводным электродвигателем для вывода компенсирующего крутящего момента с передачей компенсирующего крутящего момента на ступицу колеса для нейтрализации передаваемого в продольном направлении крутящего момента от двигателя.
9. Способ управления остановкой гибридного транспортного средства по п. 8, отличающийся тем, что дополнительно включает:
управление остановкой двигателя;
управление генератором для приложения к двигателю крутящего момента перемещения для управления скоростью вращения двигателя.
10. Способ управления остановкой гибридного транспортного средства по п. 9, отличающийся тем, что расчет передаваемого в продольном направлении крутящего момента планетарного ряда включает:
измерение скорости вращения генератора;
расчет передаваемого в продольном направлении крутящего момента на основании скорости вращения генератора и момента инерции системы валов.
11. Способ управления остановкой гибридного транспортного средства по п. 9, отличающийся тем, что расчетная формула компенсирующего крутящего момента является следующей:
,
при этом TDM представляет собой компенсирующий крутящий момент; представляет собой передаточное отношение между водилом планетарной передачи и приводным электродвигателем в планетарном ряде; k представляет собой характеристический параметр планетарного ряда; Tgen представляет собой крутящий момент перемещения генератора; Tf_ice представляет собой фрикционный крутящий момент двигателя при текущей скорости вращения; Tf_tr представляет собой крутящий момент перемещения коробки передач в гибридном транспортном средстве; Jrαr представляет собой передаваемый в продольном направлении крутящий момент; Jr представляет собой момент инерции коронной шестерни, эквивалентный планетарному ряду, в системе гибридного привода с планетарным рядом, то есть представляет собой момент инерции системы валов; αr представляет собой угловое ускорение, эквивалентное коронной шестерне в системе гибридного привода с планетарным рядом.
12. Способ управления остановкой гибридного транспортного средства по п. 9, отличающийся тем, что управление приводным двигателем для вывода компенсирующего крутящего момента включает следующие этапы:
разделение процесса остановки двигателя последовательно на несколько фаз остановки;
при разных фазах остановки соответственно управление приводным электродвигателем для вывода компенсирующего крутящего момента, соответствующего фазе остановки, в которой находится двигатель.
13. Способ управления остановкой гибридного транспортного средства по п. 12, отличающийся тем, что процесс остановки двигателя включает последовательно разделенные фазу быстрого перемещения, фазу постепенного уменьшения крутящего момента и фазу ослабления крутящего момента и остановки; при этом
в фазе быстрого перемещения приводным электродвигателем управляют для вывода компенсирующего крутящего момента перемещения с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе быстрого перемещения;
в фазе постепенного уменьшения крутящего момента приводным электродвигателем управляют для вывода компенсирующего крутящего момента перемещения с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе постепенного уменьшения крутящего момента;
в фазе ослабления крутящего момента и остановки приводным электродвигателем управляют для вывода компенсирующего крутящего момента для ослабления крутящего момента с нейтрализацией передаваемого в продольном направлении крутящего момента в фазе ослабления крутящего момента и остановки.
14. Способ управления остановкой гибридного транспортного средства по п. 12, отличающийся тем, что последовательное разделение процесса остановки двигателя на несколько фаз остановки включает следующие этапы:
измерение в реальном времени скорости вращения двигателя и измерение длительности остановки;
установление фазы остановки, в которой находится двигатель, на основании скорости вращения двигателя и измеренной длительности остановки;
при этом процесс, в котором происходит снижение скорости вращения двигателя от скорости вращения перед остановкой до конечной точки резонансной полосы, устанавливают в качестве фазы быстрого перемещения;
процесс, в котором происходит снижение скорости вращения двигателя от конечной точки резонансной полосы до 0, устанавливают в качестве фазы постепенного уменьшения крутящего момента;
процесс, происходящий от снижения скорости вращения до 0 до полной остановки двигателя, устанавливают в качестве фазы ослабления крутящего момента и остановки.
| CN 107539305 A, 05.01.2018 | |||
| CN 114074652 A, 22.02.2022 | |||
| CN 106143209 A, 23.11.2016 | |||
| JP 2011213277 A, 27.10.2011. |

