ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к системе передачи мощности и, более конкретно, к системе передачи мощности, включающей в себя первый дифференциальный механизм, соединенный с двигателем, и второй дифференциальный механизм, соединенный с первым дифференциальным механизмом.
2. Описание предшествующего уровня техники
[0002] Различные системы передачи мощности предлагались для гибридного транспортного средства, в котором используется двигатель и вращающаяся машина в качестве источников мощности. Например, в публикации международной заявки No. 2013/114594 описана система передачи мощности для гибридного транспортного средства. Система передачи мощности включает в себя первый планетарный зубчатый механизм (далее именуемый первым дифференциальным механизмом), второй планетарный зубчатый механизм (далее именуемый вторым дифференциальным механизмом), первую вращающуюся электрическую машину, вторую вращающуюся электрическую машину, а также переключающее устройство. Первый планетарный зубчатый механизм соединен с двигателем внутреннего сгорания. Второй планетарный зубчатый механизм соединяет первый дифференциальный механизм с ведущими колесами. Первая вращающаяся электрическая машина соединена со вторым дифференциальным механизмом. Вторая вращающаяся электрическая машина выполнена так, чтобы быть способной передавать мощность на выходной элемент второго дифференциального механизма. Переключающее устройство состоит из двух устройств сцепления (сцепление и тормоз), находящихся во взаимодействии с первым дифференциальным механизмом. Первая вращающаяся электрическая машина и вторая вращающаяся электрическая машина по отдельности соединены со вторым дифференциальным механизмом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Система передачи мощности, описанная в публикации международной заявки No. 2013/114594, способна переключать обороты двигателя внутреннего сгорания и передавать вращение на второй дифференциальный механизм путем приведения в действие переключающего устройства. Однако в режиме привода (режиме гибридного транспортного средства /далее, режим ГТС), в котором ведущие колеса приводятся в действие путем привода и от двигателя внутреннего сгорания и от второй вращающейся электрической машины в качестве источников мощности, чтобы гибридное транспортное средство двигалось с большой мощностью с использованием двигателя внутреннего сгорания, требуется увеличить соответственно номинальную скорость вращения или номинальный крутящий момент первой вращающейся электрической машины; в ином случае, требуется ограничить мощность двигателя внутреннего сгорания. Это происходит потому, что отношение мощности первой вращающейся электрической машины к мощности двигателя (Pg/Pe) определяется однотипно в связи с постоянным коэффициентом распределения мощности второго дифференциального механизма и, в результате, мощность первой вращающейся электрической машины увеличивается с возрастанием мощности двигателя.
[0004] Изобретением предложена система передачи мощности, которая включает в себя первый дифференциальный механизм, соединенный с двигателем, и второй дифференциальный механизм, соединенный с первым дифференциальным механизмом, который обеспечивает движение с большой мощностью с использованием двигателя без увеличения номинального крутящего момента или номинальной скорости вращения вращающейся машины.
[0005] Первый объект изобретения относится к системе передачи мощности для передачи мощности от двигателя. Система передачи мощности включает в себя: первый дифференциальный механизм, соединенный с двигателем, при этом первый дифференциальный механизм включает в себя: первый вращающийся элемент, второй вращающийся элемент и третий вращающийся элемент, причем первый вращающийся элемент соединен с двигателем; второй дифференциальный механизм, включающий в себя четвертый вращающийся элемент, пятый вращающийся элемент и шестой вращающийся элемент, притом четвертый вращающийся элемент соединен со вторым вращающимся элементом первого дифференциального механизма, пятый вращающийся элемент соединен с первой вращающейся электрической машиной, шестой вращающийся элемент представляет собой выходной элемент; первый блок сцепления, который представляет собой, по меньшей мере, одно из следующего: блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения друг с другом двух элементов из следующих - первый вращающийся элемент, второй вращающийся элемент и третий вращающийся элемент, либо блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом; а также второй блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента первого дифференциального механизма с одним из следующих - пятый вращающийся элемент, шестой вращающийся элемент второго дифференциального механизма.
[0006] В системе передачи мощности и первый дифференциальный механизм и второй дифференциальный механизм могут представлять собой планетарный зубчатый механизм: первый вращающийся элемент может представлять собой солнечную шестерню, второй вращающийся элемент может представлять собой водило, третий вращающийся элемент может представлять собой кольцевую шестерню, четвертый вращающийся элемент может представлять собой водило, пятый вращающийся элемент может представлять собой солнечную шестерню, шестой вращающийся элемент может представлять собой кольцевую шестерню, первый блок сцепления может включать в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента со вторым вращающимся элементом, и блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и второй блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с пятым вращающимся элементом.
[0007] В системе передачи мощности, каждый из следующих - первый дифференциальный механизм и второй дифференциальный механизм могут представлять собой планетарный зубчатый механизм: первый вращающийся элемент может представлять собой солнечную шестерню, второй вращающийся элемент может представлять собой кольцевую шестерню, третий вращающийся элемент может представлять собой водило, четвертый вращающийся элемент может представлять собой водило, пятый вращающийся элемент может представлять собой солнечную шестерню, шестой вращающийся элемент может представлять собой кольцевую шестерню, первый блок сцепления может включать в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента с третьим вращающимся элементом, и блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и второй блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с шестым вращающимся элементом.
[0008] В системе передачи мощности и первый дифференциальный механизм и второй дифференциальный механизм могут представлять собой планетарный зубчатый механизм: первый вращающийся элемент может представлять собой солнечную шестерню, второй вращающийся элемент может представлять собой кольцевую шестерню, третий вращающийся элемент может представлять собой водило, четвертый вращающийся элемент может представлять собой кольцевую шестерню, пятый вращающийся элемент может представлять собой солнечную шестерню, шестой вращающийся элемент может представлять собой водило, первый блок сцепления может включать в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента с третьим вращающимся элементом, и блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и второй блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с шестым вращающимся элементом.
[0009] В системе передачи мощности и первый дифференциальный механизм и второй дифференциальный механизм могут представлять собой планетарный зубчатый механизм: первый вращающийся элемент может представлять собой водило, второй вращающийся элемент может представлять собой солнечную шестерню, третий вращающийся элемент может представлять собой кольцевую шестерню, четвертый вращающийся элемент может представлять собой солнечную шестерню, пятый вращающийся элемент может представлять собой кольцевую шестерню, шестой вращающийся элемент может представлять собой водило, первый блок сцепления может включать в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента с третьим вращающимся элементом, и блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и второй блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с пятым вращающимся элементом.
[0010] В системе передачи мощности и первый дифференциальный механизм и второй дифференциальный механизм могут представлять собой планетарный зубчатый механизм: первый вращающийся элемент может представлять собой кольцевую шестерню, второй вращающийся элемент может представлять собой солнечную шестерню, третий вращающийся элемент может представлять собой водило, четвертый вращающийся элемент может представлять собой солнечную шестерню, пятый вращающийся элемент может представлять собой кольцевую шестерню, шестой вращающийся элемент может представлять собой водило, первый блок сцепления может включать в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента с третьим вращающимся элементом, а также блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и второй блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с пятым вращающимся элементом.
[0011] В системе передачи мощности, где коэффициент распределения мощности, при котором мощность двигателя распределяется между пятым вращающимся элементом и шестым вращающимся элементом в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления не сцеплен, представляет собой первый коэффициент распределения мощности, а коэффициент распределения мощности, при котором мощность двигателя распределяется между пятым вращающимся элементом и шестым вращающимся элементом в состоянии, когда второй блок сцепления находится в состоянии сцеплено, а первый блок сцепления не сцеплен, представляет собой второй коэффициент распределения мощности, причем первый коэффициент распределения мощности может отличаться от второго коэффициента распределения мощности.
[0012] Согласно первому объекту изобретения, поскольку предлагается вышеописанная конфигурация, коэффициент распределения мощности, при котором мощность двигателя распределяется между пятым вращающимся элементом и шестым вращающимся элементом в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления не сцеплен, может отличаться от коэффициента распределения мощности, при котором мощность двигателя распределяется между пятым вращающимся элементом и шестым вращающимся элементом в состоянии, когда второй блок сцепления находится в состоянии сцеплено, а первый блок сцепления не сцеплен. Даже когда коэффициент редукции (Ne/No), который представляет собой отношение (Ne) оборотов двигателя к скорости (No) вращения выходного вала системы передачи мощности, является одинаковым, но, когда коэффициент распределения мощности изменяется, отношение крутящих моментов (Tg/Te) - крутящего момента (Tg) первой вращающейся электрической машины к крутящему моменту (Те) двигателя, и отношение скоростей вращения (Ng/Ne) - скорости вращения (Ng) первой вращающейся электрической машины к оборотам (Ne) двигателя, оба изменяются, с тем результатом, что отношение мощностей (Pg/Pe) - мощности первой вращающейся электрической машины к мощности двигателя, также изменяется. Поэтому возрастание номинального крутящего момента или номинальной скорости вращения вращающейся машины уменьшается при выборе коэффициента распределения мощности, имеющего небольшое отношение мощностей, при этом достигается то преимущество, что транспортное средство способно двигаться при большой мощности двигателя.
[0013] Второй объект изобретения относится к транспортному средству. Транспортное средство может включать в себя: систему передачи мощности согласно вышеописанному первому объекту, первую вращающуюся электрическую машину, рабочий статус которой управляется для управления дифференциальным статусом второго дифференциального механизма, при этом крутящий момент, увеличенный по сравнению с крутящим моментом двигателя, механически передается на шестой вращающийся элемент, когда дифференциальный статус второго дифференциального механизма управляется в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен; двигатель, соединенный с первым вращающимся элементом так, что при этом передается мощность; ведущее колесо, соединенное с шестым вращающимся элементом; вторую вращающуюся электрическую машину, соединенную с ведущим колесом так, что при этом передается мощность; а также электронный блок управления, выполненный с возможностью при запуске двигателя переводить второй блок сцепления от расцепленного состояния в сцепленное состояние в состоянии, когда первый блок сцепления находится в состоянии сцеплено.
[0014] При такой конфигурации, когда при запуске двигателя при генерировании крутящего момента с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, крутящий момент, увеличенный по сравнению с втягивающим крутящим моментом двигателя, механически передается на шестой вращающийся элемент, соединенный с ведущим колесом. Поскольку втягивающий крутящий момент двигателя может воздействовать непосредственно на шестой вращающийся элемент путем перевода второго блока сцепления из расцепленного состояния в сцепленное состояние в состоянии, когда первый блок сцепления находится в состоянии сцеплено, при запуске двигателя можно уменьшить компенсирующий крутящий момент по сравнению с компенсирующим крутящим моментом во время запуска двигателя с использованием первой вращающейся электрической машины. Таким образом, при запуске двигателя можно легко компенсировать падение приводного крутящего момента.
[0015] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью при запуске двигателя выдачи крутящего момента из первой вращающейся электрической машины, при этом падение выходного крутящего момента на ведущем колесе уменьшается.
[0016] При такой конфигурации, когда при запуске двигателя путем перевода второго блока сцепления из расцепленного состояния в сцепленное состояние не выдается крутящий момент (например, отрицательный крутящий момент), используемый для запуска двигателя, генерируемый первой вращающейся электрической машиной, а выдается крутящий момент (например, положительный крутящий момент) из первой вращающейся электрической машины, при этом падение приводного крутящего момента уменьшается, причем можно генерировать компенсирующий крутящий момент с использованием первой вращающейся электрической машины. Таким образом, например, когда весь компенсирующий крутящий момент обеспечивается второй вращающейся электрической машиной, можно расширить область привода электрическим двигателем, в которой используется вторая вращающаяся электрическая машина, которая определяется заранее так, что при этом резервируется компенсирующий крутящий момент.
[0017] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью при запуске двигателя выдавать крутящий момент из каждой из машин: и из первой вращающейся электрической машины и из второй вращающейся электрической машины так, что при этом падение выходного крутящего момента на ведущем колесе уменьшается.
[0018] При такой конфигурации при запуске двигателя крутящий момент выдается из каждой из машин: и из первой вращающейся электрической машины и из второй вращающейся электрической машины так, что при этом падение приводного крутящего момента уменьшается, причем можно генерировать компенсирующий крутящий момент с использованием и первой вращающейся электрической машины и второй вращающейся электрической машины. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0019] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью установки крутящего момента, который выдается из первой вращающейся электрической машины, на заданную величину или меньшую.
[0020] При такой конфигурации компенсирующий крутящий момент, который генерируется первой вращающейся электрической машиной, действует в направлении снижения скорости вращения второго вращающегося элемента (то есть каждого из вращающихся элементов первого дифференциального механизма, которые вращаются как одно целое в результате сцепленного состояния первого блока сцепления), соединенного с четвертым вращающимся элементом (то есть компенсирующий крутящий момент действует в качестве противодействующего крутящего момента на второй блок сцепления, который переходит из расцепленного состояния в сцепленное состояние). Поскольку крутящий момент, который выдается из первой вращающейся электрической машины, устанавливается на заданную величину или меньшую, можно с использованием первой вращающейся электрической машины осуществить и увеличение оборотов двигателя с использованием второго блока сцепления, и компенсацию падения приводного крутящего момента.
[0021] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью уменьшения крутящего момента, который выдается из первой вращающейся электрической машины, когда нагрузка при движении транспортного средства уменьшается.
[0022] При такой конфигурации компенсирующий крутящий момент заставляет воздействовать непосредственно на ведущее колесо при компенсации в отношении падения приводного крутящего момента с использованием второй вращающейся электрической машины, при этом относительно легко управлять величиной компенсирующего крутящего момента; при этом противодействующий крутящий момент действует с использованием второго блока сцепления, который переключается из расцепленного состояния в направлении сцепленного состояния, в состоянии проскальзывания при компенсации падения приводного крутящего момента с использованием первой вращающейся электрической машины, при этом относительно трудно управлять величиной компенсирующего крутящего момента, который воздействует на ведущее колесо. Поскольку крутящий момент, который выдается из первой вращающейся электрической машины, уменьшается, когда нагрузка при движении транспортного средства уменьшается, то есть запас выходного крутящего момента из второй вращающейся электрической машины соответственно возрастает, компенсирующий крутящий момент, который генерируется второй вращающейся электрической машиной, увеличивается с тем результатом, что можно стабильно компенсировать падение приводного крутящего момента. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0023] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен, чтобы выводить из первой вращающейся электрической машины крутящий момент, на который крутящий момент второй вращающейся электрической машины недостаточен для крутящего момента для уменьшения падения выходного крутящего момента на ведущем колесе.
[0024] При такой конфигурации относительно легко управлять величиной компенсирующего крутящего момента при компенсации падения приводного крутящего момента с использованием второй вращающейся электрической машины, при этом относительно трудно управлять величиной компенсирующего крутящего момента, который воздействует на ведущее колесо при компенсации падения приводного крутящего момента с использованием первой вращающейся электрической машины. Поскольку крутящий момент, на величину которого крутящий момент второй вращающейся электрической машины недостаточен для крутящего момента для уменьшения падения приводного крутящего момента, выдается из первой вращающейся электрической машины, то компенсирующий крутящий момент, который генерируется второй вращающейся электрической машиной, выдается, отдавая предпочтение перед компенсирующим крутящим моментом, который генерируется первой вращающейся электрической машиной, при этом можно стабильно компенсировать падение приводного крутящего момента. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0025] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью при запуске двигателя выдавать крутящий момент из первой вращающейся электрической машины во время управления с обратной связью, при этом обороты двигателя изменяются вблизи целевого значения.
[0026] При такой конфигурации изменение оборотов двигателя имеет тенденцию к флуктуации при запуске двигателя в связи с переключением второго блока сцепления из расцепленного состояния в сцепленное состояние, при этом стабильность сгорания в двигателе может быть нарушена. Поскольку крутящий момент выдается из первой вращающейся электрической машины во время управления с обратной связью так, что при этом обороты двигателя находятся вблизи целевого значения при запуске двигателя, можно снизить флуктуации изменений оборотов двигателя путем использования первой вращающейся электрической машины, имеющей более быструю приемистость, чем переключение второго блока сцепления. Таким образом, легко обеспечить стабильность сгорания в двигателе.
[0027] В вышеупомянутом транспортном средстве, электронный блок управления может быть выполнен с возможностью выполнения управления запуском двигателя для переключения второго блока сцепления из расцепленного состояния в сцепленное состояние в том состоянии, когда первый блок сцепления находится в состоянии сцеплено, когда приемистость во время управления вторым блоком сцепления выше заданного критерия, и с возможностью выполнения управления запуском двигателя для увеличения оборотов двигателя с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления находится в состоянии расцеплено, когда приемистость во время управления вторым блоком сцепления ниже заданного критерия.
[0028] При такой конфигурации, когда приемистость во время управления вторым блоком сцепления ниже заданного критерия, управление запуском двигателя для увеличения оборотов двигателя выполняется с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, при этом можно обеспечить приемистость запуска двигателя.
[0029] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью сужения области привода с использованием мотора в случае, когда приемистость во время управления вторым блоком сцепления ниже заданного критерия, по сравнению с областью привода с помощью электрического двигателя в случае, когда приемистость во время управления вторым блоком сцепления выше заданного критерия, и режим привода с помощью электрического двигателя может представлять собой режим привода, в котором транспортное средство движется путем использования второй вращающейся электрической машины в качестве источника движущей силы в состоянии, когда работа двигателя остановлена.
[0030] При такой конфигурации, при запуске двигателя посредством генерирования крутящего момента с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, требуемый компенсирующий крутящий момент возрастает. Поскольку область режима привода с помощью электрического двигателя в случае, когда управляемость во время управления вторым блоком сцепления ниже заданного критерия, сделана уже, чем область режима привода с помощью электрического двигателя в случае, когда управляемость во время управления вторым блоком сцепления выше заданного критерия, легко зарезервировать запас выходного крутящего момента из второй вращающейся электрической машины (то есть легко зарезервировать компенсирующий крутящий момент, который генерируется второй вращающейся электрической машиной) во время запуска двигателя.
[0031] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью определения, по меньшей мере, либо когда температура рабочего масла для управления вторым блоком сцепления выше заданной температуры масла, либо когда температура рабочего масла ниже второй заданной температуры масла, которая выше заданной температуры масла, что приемистость во время управления вторым блоком сцепления выше заданного критерия.
[0032] При такой конфигурации быстродействие второго блока сцепления может ухудшиться из-за высокой вязкости рабочего масла в случае, когда температура рабочего масла для управления вторым блоком сцепления низкая, и быстродействие второго блока сцепления может ухудшиться из-за утечки рабочего масла из зазоров и пр. в клапанах, связанных с подачей гидравлического давления на второй блок сцепления, в случае, когда температура рабочего масла высокая. Когда определено, что приемистость во время управления вторым блоком сцепления выше или ниже, чем заданный критерий на основе температуры рабочего масла для управления вторым блоком сцепления и, когда приемистость (которая является синонимом быстродействие) второго блока сцепления ниже заданного критерия, управление запуском двигателя с использованием первой вращающейся электрической машины выполняется для обеспечения плавного запуска двигателя, можно обеспечить быстродействие запуска двигателя.
[0033] В вышеупомянутом транспортном средстве второй дифференциальный механизм может включать в себя одноступенчатый планетарный зубчатый механизм, в котором один из элементов, либо солнечная шестерня, либо кольцевая шестерня представляет собой четвертый вращающийся элемент, а другой из элементов, либо солнечная шестерня, либо кольцевая шестерня, представляет собой пятый вращающийся элемент, а водило является шестым вращающимся элементом.
[0034] При такой конфигурации второй дифференциальный механизм включает в себя одноступенчатый планетарный зубчатый механизм, в котором один из элементов, либо солнечная шестерня, либо кольцевая шестерня представляет собой четвертый вращающийся элемент, а другой из элементов, либо солнечная шестерня, либо кольцевая шестерня, представляет собой пятый вращающийся элемент, и водило является шестым вращающимся элементом, при этом, когда дифференциальный статус второго дифференциального механизма управляется в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок зацепления расцеплен, крутящий момент, увеличенный по сравнению с крутящим моментом двигателя, механически передается на шестой вращающийся элемент.
[0035] Третий объект изобретения относится к транспортному средству. Транспортное средство может включать в себя: систему передачи мощности согласно вышеописанному первому объекту; первую вращающуюся электрическую машину, рабочий статус которой управляется для управления дифференциальным статусом второго дифференциального механизма; двигатель, соединенный с первым вращающимся элементом так, что при этом передается мощность; ведущее колесо, соединенное с шестым вращающимся элементом; вторую вращающуюся электрическую машину, соединенную с ведущим колесом так, что при этом передается мощность; а также электронный блок управления, выполненный с возможностью, когда запускается двигатель, переводить второй блок сцепления из расцепленного состояния в сцепленное состояние в состоянии, когда первый блок сцепления находится в состоянии сцеплено, и, когда запускается двигатель, выдавать крутящий момент из первой вращающейся электрической машины, при этом падение выходного крутящего момента на ведущем колесе уменьшается.
[0036] При такой конфигурации при запуске двигателя первой вращающейся электрической машиной генерируется крутящий момент (например, положительный крутящий момент), который используется для запуска двигателя, в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, но второй блок сцепления переводится из расцепленного состояния в сцепленное состояние в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а из первой вращающейся электрической машины выдается крутящий момент (например, отрицательный крутящий момент) так, что при этом падение приводного крутящего момента уменьшается, при этом можно генерировать компенсирующий крутящий момент с использованием первой вращающейся электрической машины. Таким образом, при запуске двигателя можно легко компенсировать падение приводного крутящего момента.
[0037] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью при запуске двигателя выдавать крутящий момент из каждой из машин, и из первой вращающейся электрической машины и из второй вращающейся электрической машины так, что при этом падение выходного крутящего момента на ведущем колесе уменьшается.
[0038] При такой конфигурации при запуске двигателя крутящий момент выдается из каждой из машин, и из первой вращающейся электрической машины и из второй вращающейся электрической машины так, что при этом падение приводного крутящего момента уменьшается, при этом можно генерировать компенсирующий крутящий момент с использованием обеих - и первой вращающейся электрической машины и второй вращающейся электрической машины. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0039] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью установки крутящего момента, который выдается из первой вращающейся электрической машины, на заданную величину или меньшую.
[0040] При такой конфигурации компенсирующий крутящий момент, который генерируется первой вращающейся электрической машиной, действует в направлении снижения скорости вращения второго вращающегося элемента (то есть вращающихся элементов первого дифференциального механизма, которые вращаются как одно целое в результате включения первого блока сцепления) соединенного с четвертым вращающимся элементом (то есть компенсирующий крутящий момент действует в качестве противодействующего крутящего момента на второй блок сцепления, который переходит из расцепленного состояния к сцепленному состоянию). Поскольку крутящий момент, который выдается из первой вращающейся электрической машины, устанавливается на заданную величину или меньшую, можно осуществить и увеличение оборотов двигателя с использованием второго блока сцепления и компенсацию падения приводного крутящего момента с использованием первой вращающейся электрической машины.
[0041] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью уменьшения крутящего момента, который выдается из первой вращающейся электрической машины, когда нагрузка при движении транспортного средства уменьшается.
[0042] При такой конфигурации компенсирующий крутящий момент воздействует непосредственно на ведущее колесо при компенсации падения приводного крутящего момента с использованием второй вращающейся электрической машины, при этом относительно легко управлять величиной компенсирующего крутящего момента; причем противодействующий крутящий момент воздействует с использованием второго блока сцепления, который переходит из расцепленного состояния в сцепленное состояние, в состоянии проскальзывания, при компенсации падения приводного крутящего момента с использованием первой вращающейся электрической машины, при этом относительно трудно управлять величиной компенсирующего крутящего момента, который воздействует на ведущее колесо. Поскольку крутящий момент, который выдается из первой вращающейся электрической машины, уменьшается, когда нагрузка при движении транспортного средства уменьшается, то есть запас выходного крутящего момента из второй вращающейся электрической машины соответственно возрастает, компенсирующий крутящий момент, который генерируется второй вращающейся электрической машиной, увеличивается, при этом можно стабильно компенсировать падение приводного крутящего момента. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0043] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью выдачи из первой вращающейся электрической машины крутящего момента, на который крутящий момент второй вращающейся электрической машины недостаточен для крутящего момента для уменьшения падения выходного крутящего момента на ведущем колесе.
[0044] При такой конфигурации относительно легко управлять величиной компенсирующего крутящего момента при компенсации падения приводного крутящего момента с использованием второй вращающейся электрической машины, при этом относительно трудно управлять величиной компенсирующего крутящего момента, который воздействует на ведущее колесо при компенсации падения приводного крутящего момента с использованием первой вращающейся электрической машины. Поскольку крутящий момент, на который крутящий момент второй вращающейся электрической машины недостаточен для крутящего момента для уменьшения падения приводного крутящего момента, выдается из первой вращающейся электрической машины, компенсирующий крутящий момент, который генерируется второй вращающейся электрической машиной, выдается, отдавая предпочтение перед компенсирующим крутящим моментом, который генерируется первой вращающейся электрической машиной, при этом можно стабильно компенсировать падение приводного крутящего момента. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0045] В вышеупомянутом транспортном средстве электронный блок управления может быть выполнен с возможностью при запуске двигателя выдачи крутящего момента из первой вращающейся электрической машины во время управления с обратной связью, при этом обороты двигателя изменяются вблизи целевого значения.
[0046] При такой конфигурации изменение оборотов двигателя имеет тенденцию к случайным колебаниям при запуске двигателя при переключении второго блока сцепления из расцепленного состояния в сцепленное состояние, при этом стабильность сгорания в двигателе может быть нарушена. Поскольку крутящий момент выдается из первой вращающейся электрической машины во время управления с обратной связью, при этом обороты двигателя находятся вблизи целевого значения во время запуска двигателя, можно снизить флуктуации изменений оборотов двигателя путем использования первой вращающейся электрической машины, имеющей более быструю приемистость, чем переключение второго блока сцепления. Таким образом, легко обеспечить стабильность сгорания в двигателе.
[0047] В вышеупомянутом транспортном средстве электронный блок управления может быть сконфигурирован, чтобы выполнить управление запуском двигателя для переключения второго блока сцепления из расцепленного состояния в сцепленное состояние, в состоянии, когда первый блок сцепления находится в состоянии сцеплено, когда приемистость во время управления вторым блоком зацепления выше заданного критерия, и выполнение управления запуском двигателя для увеличения оборотов двигателя с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, когда приемистость во время переключения второго блока сцепления ниже заданного критерия.
[0048] При такой конфигурации, когда управляемость во время управления вторым блоком сцепления ниже заданного критерия, выполняется управление запуском двигателя для увеличения оборотов двигателя с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, при этом можно обеспечить приемистость запуска двигателя.
[0049] В вышеупомянутом транспортном средстве электронный блок управления может быть сконфигурирован с возможностью сужения области привода с помощью электрического двигателя в случае, когда управляемость во время переключения второго блока сцепления ниже заданного критерия по сравнению с областью привода с помощью электрического двигателя в случае, когда управляемость во время переключения второго блока сцепления выше заданного критерия, и режим привода с помощью электрического двигателя может представлять собой режим привода, в котором транспортное средство движется путем использования второй вращающейся электрической машины в качестве источника движущей силы в состоянии, когда работа двигателя остановлена.
[0050] При такой конфигурации, когда при запуске двигателя посредством генерирования крутящего момента с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, компенсирующий крутящий момент выдается с использованием только второй вращающейся электрической машины. Поскольку область режима привода с помощью электрического двигателя в случае, когда управляемость во время переключения второго блока сцепления ниже заданного критерия, сделана уже, чем область режима привода с помощью электрического двигателя в случае, когда управляемость во время управления вторым блоком сцепления выше заданного критерия, легко зарезервировать запас выходного крутящего момента из второй вращающейся электрической машины (то есть легко зарезервировать компенсирующий крутящий момент, который генерируется второй вращающейся электрической машиной) во время запуска двигателя.
[0051] В вышеупомянутом транспортном средстве электронный блок управления может быть сконфигурирован с возможностью определения по меньшей мере одного из следующего, либо когда температура рабочего масла для управления вторым блоком сцепления выше заданной температуры масла, либо когда температура рабочего масла ниже второй заданной температуры масла, которая выше заданной температуры масла, что управляемость во время переключения второго блока сцепления выше заданного критерия.
[0052] В вышеупомянутой конфигурации управляемость второго блока сцепления может ухудшиться из-за высокой вязкости рабочего масла в случае, когда температура рабочего масла для управления вторым блоком сцепления низкая, и управляемость второго блока сцепления может ухудшиться из-за утечки рабочего масла из зазоров и пр. в клапанах, связанных с подачей гидравлического давления на второй блок сцепления, в случае, когда температура рабочего масла высокая. Когда определено, что управляемость во время переключения второго блока сцепления выше или ниже, чем заданный критерий на основе температуры рабочего масла для управления вторым блоком сцепления, и когда управляемость (которая является синонимом приемистости) второго блока сцепления ниже заданного критерия, управление запуском двигателя с использованием первой вращающейся электрической машины выполняется для обеспечения плавного запуска двигателя, можно обеспечить приемистость запуска двигателя 1.
[0053] В вышеупомянутом транспортном средстве второй дифференциальный механизм может включать в себя одношестеренчатый планетарный зубчатый механизм, в котором один из элементов, либо солнечная шестерня, либо кольцевая шестерня представляет собой пятый вращающийся элемент, а другой из элементов, либо солнечная шестерня, либо кольцевая шестерня является шестым вращающимся элементом, а водило представляет собой четвертый вращающийся элемент.
[0054] При такой конфигурации второй дифференциальный механизм включает в себя одноступенчатый планетарный зубчатый механизм, в котором либо солнечная шестерня, либо кольцевая шестерня представляет собой пятый вращающийся элемент, и либо солнечная шестерня, либо кольцевая шестерня является шестым вращающимся элементом, а водило представляет собой четвертый вращающийся элемент, при этом, когда дифференциальный статус второго дифференциального механизма управляется в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, крутящий момент, уменьшенный по сравнению с крутящим моментом двигателя, механически передается на шестой вращающийся элемент.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0055] Признаки, преимущества, а также техническая и промышленная значимость типовых вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, и на которых:
на Фиг. 1 представлено схематичное изображение, на котором показана зубчатая передача гибридного транспортного средства согласно первому варианту осуществления изобретения;
на Фиг. 2 представлена блок-схема управления основной частью в транспортном средстве, показанном на фиг. 1;
на Фиг. 3 представлена диаграмма работы сцепления, на которой показана взаимосвязь между каждым режимом привода и рабочим статусом каждого блока сцепления в транспортном средстве, показанном на фиг. 1;
на Фиг. 4А - фиг. 4Н представлены номограммы, относящиеся к режимам привода в транспортном средстве, показанном на фиг. 1;
на Фиг. 5 представлена диаграмма, на которой показана взаимосвязь между коэффициентом редукции и отношением крутящих моментов в каждом из режимов: в первом режиме гибридного транспортного средства, далее ГТС, (повышенная передача, далее ПОВ/П), и во втором режиме ГТС (пониженная передача, далее ПОН/П), в транспортном средстве, показанном на фиг. 1;
на Фиг. 6 представлена диаграмма, на которой показана взаимосвязь между коэффициентом редукции и отношением скоростей вращения в каждом из режимов: в первом режиме ГТС (ПОВ/П), и во втором режиме ГТС (ПОН/П) в транспортном средстве, показанном на фиг. 1;
на Фиг. 7 представлена диаграмма, на которой показана взаимосвязь между коэффициентом редукции и отношением мощностей в каждом из режимов: в первом режиме ГТС (ПОВ/П), и во втором режиме ГТС (ПОН/П) в транспортном средстве, показанном на фиг. 1;
на Фиг. 8 представлено схематичное изображение, на котором показана зубчатая передача гибридного транспортного средства согласно второму варианту осуществления изобретения;
на Фиг. 9 представлена диаграмма работы сцепления, на которой показана взаимосвязь между каждым режимом привода и рабочим статусом каждого блока сцепления в транспортном средстве, показанном на фиг. 8;
на Фиг. 10А - 10G представлены номограммы, относящиеся к режимам привода в транспортном средстве, показанном на фиг. 8;
на Фиг. 11 представлено схематичное изображение, на котором показана зубчатая передача гибридного транспортного средства согласно третьему варианту осуществления изобретения;
на Фиг. 12 представлена диаграмма работы сцепления, на которой показана взаимосвязь между каждым режимом привода и рабочим статусом каждого блока сцепления в транспортном средстве, показанном на фиг. 11;
на Фиг. 13А - 13G представлены номограммы, относящиеся к режимам привода в транспортном средстве, показанном на фиг. 11;
на Фиг. 14 представлено схематичное изображение, на котором показана зубчатая передача гибридного транспортного средства согласно четвертому варианту осуществления изобретения;
на Фиг. 15 представлена диаграмма работы сцепления, на которой показана взаимосвязь между каждым режимом привода и рабочим статусом каждого блока сцепления в транспортном средстве, показанном на фиг. 14;
на Фиг. 16А - 16Н представлены номограммы, относящиеся к режимам привода в транспортном средстве, показанном на фиг. 14;
на Фиг. 17 представлено схематичное изображение, на котором показана зубчатая передача гибридного транспортного средства согласно пятому варианту осуществления изобретения;
на Фиг. 18 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства, согласно шестому варианту осуществления изобретения, и который также иллюстрирует соответствующий участок системы управления для управления этими устройствами;
на Фиг. 19 представлена диаграмма работы сцепления, на которой показан рабочий статус каждого блока сцепления в каждом режиме привода;
на Фиг. 20 представлена номограмма в режиме электроавтомобиля (электрическое транспортное средство), далее ЭТС, с одним электрическим двигателем;
на Фиг. 21 представлена номограмма в режиме ЭТС с двумя электрическими двигателями;
на Фиг. 22 представлена номограмма в режиме ПОВ/П для ГТС в режиме привода ГТС
на Фиг. 23 представлена номограмма в период, когда транспортное средство движется вперед в режиме ПОН/П для ГТС в режиме привода ГТС;
на Фиг. 24 представлена номограмма в период, когда транспортное средство движется назад в режиме ПОН/П для ГТС в режиме привода ГТС в случае переключения двигателя на заднюю передачу;
на Фиг. 25 представлена номограмма в период, когда транспортное средство движется назад в режиме ПОН/П для ГТС в режиме привода ГТС в случае переключения двигателя на переднюю передачу;
на Фиг. 26 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС в случае прямого соединения;
на Фиг. 27 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС в случае неподвижного выходного вала;
на Фиг. 28 представлена диаграмма, на которой показан пример отношения скоростей вращения - скорости вращения электродвигателя-генератора MG1 к оборотам двигателя внутреннего сгорания, далее двигателя, и пример отношения скоростей вращения - скорости вращения MG2 к оборотам двигателя;
на Фиг. 29 представлена диаграмма, на которой показан пример отношения мощностей - мощности MG1 к мощности двигателя и пример отношения мощностей - мощности MG2 к мощности двигателя;
на Фиг. 30 представлена схема, на которой показан пример карты изменения режима привода, который используется при управлении для изменения режима привода между режимом привода с помощью двигателя и режимом привода с помощью электрического двигателя в случае, когда транспортное средство движется, и при этом поддерживает состояние зарядки;
на Фиг. 31 представлена схема, на которой показан пример карты изменения режима привода, который используется при управлении для изменения режима привода между режимом привода с помощью двигателя и режимом привода с помощью электрического двигателя в случае, когда транспортное средство движется, и при этом расходует уровень зарядки;
на Фиг. 32 представлена схема, которая иллюстрирует пример случая, когда обороты двигателя увеличиваются для запуска двигателя путем генерирования крутящего момента MG1 в состоянии, когда сцепление С1 сцеплено в режиме ЭТС с одним электрическим двигателем;
на Фиг. 33 представлена схема, которая иллюстрирует пример случая, когда обороты двигателя увеличиваются для запуска двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 сцеплено в режиме ЭТС с одним электрическим двигателем;
на Фиг. 34 представлена диаграмма, которая иллюстрирует пример случая, когда первая вращающаяся электрическая машина выдает компенсирующий крутящий момент во время запуска двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 сцеплено в режиме ЭТС с одним электрическим двигателем;
на Фиг. 35 представлена диаграмма, которая иллюстрирует крутящий момент CR, который нужно генерировать в сцеплении CR в случае, когда первая вращающаяся электрическая машина выдает компенсирующий крутящий момент;
на Фиг. 36 представлена блок-схема, которая иллюстрирует соответствующую часть операций управления электронного блока управления, то есть операции управления для облегчения компенсации падения приводного крутящего момента во время запуска двигателя;
на Фиг. 37 представлены графики, на которых показан пример временной диаграммы в случае, когда выполняются операции управления, показанные на блок-схеме на фиг. 36;
на Фиг. 38 представлена блок-схема, которая иллюстрирует соответствующую часть операций управления электронного блока управления, то есть операции управления для изменения области ЭТС на основе реакции системы в то время, когда сцепление CR работает согласно седьмому и одиннадцатому вариантам осуществления изобретения;
на Фиг. 39 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства согласно восьмому варианту осуществления изобретения, и которая также иллюстрирует транспортное средство, отличное от транспортного средства, показанного на фиг. 18;
на Фиг. 40 представлена диаграмма работы сцепления, на которой показан рабочий статус каждого блока сцепления в каждом режиме привода в транспортном средстве, показанном на фиг. 39;
на Фиг. 41 представлена номограмма в режиме ЭТС с одним электрическим двигателем в транспортном средстве, показанном на фиг. 39;
на Фиг. 42 представлена номограмма в режиме ЭТС с двумя электрическими двигателями в транспортном средстве, показанном на фиг. 39;
на Фиг. 43 представлена номограмма в период, когда транспортное средство движется вперед в режиме ПОВ/П для ГТС в режиме привода ГТС в транспортном средстве, показанном на фиг. 39;
на Фиг. 44 представлена номограмма в период, когда транспортное средство движется назад в режиме ПОВ/П для ГТС в режиме привода ГТС в транспортном средстве, показанном на фиг. 39;
на Фиг. 45 представлена номограмма в период, когда транспортное средство движется вперед в режиме ПОН/П для ГТС в режиме привода ГТС в транспортном средстве, показанном на фиг. 39 в случае переключения на низкую передачу;
на Фиг. 46 представлена номограмма в период, когда транспортное средство движется вперед в режиме ПОН/П для ГТС в режиме привода ГТС в транспортном средстве, показанном на фиг. 39 в случае переключения на высокую передачу;
на Фиг. 47 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС в транспортном средстве, показанном на фиг. 39 в случае прямого соединения;
на Фиг. 48 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС в транспортном средстве, показанном на фиг. 39 в случае ПОВ/П;
на Фиг. 49 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящаяся к движению транспортного средства согласно девятому варианту осуществления изобретения, и который также иллюстрирует транспортное средство, отличное от транспортного средства, показанного на фиг. 18, или транспортного средства, показанного на фиг. 39;
на Фиг. 50 представлена номограмма в режиме ЭТС с одним электрическим двигателем в транспортном средстве, показанном на фиг. 49;
на Фиг. 51 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящаяся к движению транспортного средства согласно десятому варианту осуществления изобретения, и которая также иллюстрирует соответствующую часть системы управления для управления этими устройствами;
на Фиг. 52 представлена диаграмма работы сцепления, на которой показан рабочий статус каждого блока сцепления в каждом режиме привода;
на Фиг. 53 представлена номограмма в режиме ЭТС с одним электрическим двигателем;
на Фиг. 54 представлена номограмма в режиме ЭТС с двумя электрическими двигателями;
на Фиг. 55 представлена номограмма в период, когда транспортное средство движется вперед в режиме ПОВ/П для ГТС в режиме привода ГТ;
на Фиг. 56 представлена номограмма в режиме ПОН/П для ГТС в режиме привода ГТС;
на Фиг. 57 представлена номограмма в период, когда транспортное средство движется назад в режиме ПОВ/П для ГТС в режиме привода ГТС в случае переключения двигателя на заднюю передачу;
на Фиг. 58 представлена номограмма в период, когда транспортное средство движется назад в режиме ПОВ/П для ГТС в режиме привода ГТС в случае переключения двигателя на переднюю передачу;
на Фиг. 59 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС в случае прямого соединения;
на Фиг. 60 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС в случае неподвижного выходного вала;
на Фиг. 61 представлена схема, которая иллюстрирует пример случая, когда обороты двигателя увеличиваются для запуска двигателя путем генерирования крутящего момента MG1 в состоянии, когда сцепление С1 сцеплено в режиме ЭТС с одним электрическим двигателем;
на Фиг. 62 представлена схема, которая иллюстрирует пример случая, когда обороты двигателя увеличиваются, и двигатель запускается путем приведения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 сцеплено в режиме ЭТС с одним электрическим двигателем, а первая вращающаяся электрическая машина выдает компенсирующий крутящий момент;
на Фиг. 63 представлена блок-схема, которая иллюстрирует соответствующую часть операций управления электронного блока управления, то есть операции управления для того, чтобы сделать с минимальными затратами компенсацию падения приводного крутящего момента во время запуска двигателя;
на Фиг. 64 представлены графики, на которых показан пример временной диаграммы в случае, когда выполняются операции управления, показанные на блок-схеме на фиг. 63;
на Фиг. 65 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства согласно двенадцатому варианту осуществления изобретения, и которая также иллюстрирует транспортное средство, отличное от транспортного средства, показанного на фиг. 51;
на Фиг. 66 представлена диаграмма работы сцепления, на которой показан рабочий статус каждого блока сцепления в каждом режиме привода в транспортном средстве, показанном на фиг. 65;
на Фиг. 67 представлена номограмма в режиме ЭТС с одним электрическим двигателем в транспортном средстве, показанном на фиг. 65;
на Фиг. 68 представлена номограмма в режиме ЭТС с двумя электрическими двигателями в транспортном средстве, показанном на фиг. 65;
на Фиг. 69 представлена номограмма в период, когда транспортное средство движется вперед в режиме ПОВ/П для ГТС в режиме привода ГТС в транспортном средстве, показанном на фиг. 65 в случае переключения на низкую передачу;
на Фиг. 70 представлена номограмма в период, когда транспортное средство движется вперед в режиме ПОВ/П для ГТС в режиме привода ГТС в транспортном средстве, показанном на фиг. 65 в случае переключения на высокую передачу;
на Фиг. 71 представлена номограмма в период, когда транспортное средство движется назад в режиме ПОВ/П для ГТС в режиме привода ГТС в транспортном средстве, показанном на фиг. 65 в случае переключения на высокую передачу;
на Фиг. 72 представлена номограмма в режиме ПОН/П для ГТС в режиме привода ГТС в транспортном средстве, показанном на фиг. 65.
на Фиг. 73 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС в транспортном средстве, показанном на фиг. 65, в случае прямого соединения;
на Фиг. 74 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС в транспортном средстве, показанном на фиг. 65 в случае ПОН/П; и
на Фиг. 75 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства согласно тринадцатому варианту осуществления изобретения, и которая также иллюстрирует транспортное средство, отличное от транспортного средства, показанного на фиг. 51, или транспортного средства, показанного на фиг. 65.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0056] Объект изобретения относится к системе передачи мощности для передачи мощности от двигателя. Система передачи мощности включает в себя первый дифференциальный механизм, второй дифференциальный механизм, первый блок сцепления и второй блок сцепления. Первый дифференциальный механизм соединен с двигателем. Второй дифференциальный механизм соединен с первым дифференциальным механизмом. Первый блок сцепления сопряжен с первым дифференциальным механизмом. Второй блок сцепления способен формировать пару для разъемного соединения одного из вращающихся элементов первого дифференциального механизма с одним из вращающихся элементов второго дифференциального механизма. Первый дифференциальный механизм включает в себя первый вращающийся элемент, второй вращающийся элемент и третий вращающийся элемент. Первый вращающийся элемент соединен с двигателем. Первый дифференциальный механизм, оптимально, представляет собой планетарный зубчатый механизм (первый планетарный зубчатый механизм). Второй дифференциальный механизм включает в себя четвертый вращающийся элемент, пятый вращающийся элемент и шестой вращающийся элемент. Четвертый вращающийся элемент соединен со вторым вращающимся элементом первого дифференциального механизма. Пятый вращающийся элемент соединен с первой вращающейся электрической машиной. Шестой вращающийся элемент представляет собой выходной элемент второго дифференциального механизма. В вариантах осуществления изобретения, которые будут описаны ниже, шестой вращающийся элемент соединен с колесами и второй вращающейся электрической машиной. Второй дифференциальный механизм, предпочтительно, представляет собой планетарный зубчатый механизм (второй планетарный зубчатый механизм). Первый планетарный зубчатый механизм может представлять собой одношестеренчатый планетарный зубчатый механизм или двухшестеренчатый планетарный зубчатый механизм. Это также относится ко второму планетарному зубчатому механизму.
[0057] Первый блок сцепления представляет собой любой из блоков сцепления - блок сцепления, выполненный с возможность соединять с возможностью расцепления два элемента из числа элементов - первый вращающийся элемент, второй вращающийся элемент и третий вращающийся элемент друг с другом, и блок сцепления, выполненный с возможность соединять с возможностью расцепления третий вращающийся элемент с неподвижным элементом. С другой стороны, второй блок сцепления способен соединять с возможностью расцепления третий вращающийся элемент первого дифференциального механизма с любым из следующего - пятый вращающийся элемент и шестой вращающийся элемент второго дифференциального механизма. В варианте осуществления изобретения каждый из блоков - первый блок сцепления и второй блок сцепления, способен работать, как описано ниже (с возможностью селективной установки в сцепленное состояние или расцепленное состояние (несцепленное состояние)), при этом коэффициент распределения мощности двигателя между пятым вращающимся элементом (в частности, первой вращающейся электрической машиной) и шестым вращающимся элементом (то есть выходным элементом второго дифференциального механизма) через первый и второй дифференциальные механизмы, в частности, через второй дифференциальный механизм, меняется.
[0058] Далее варианты осуществления изобретения будут описаны подробно со ссылкой на сопровождающие чертежи. Первый вариант осуществления изобретения будет описан со ссылкой на фиг. 1-7. Настоящий вариант осуществления относится к системе ТМ1 передачи мощности для передачи мощности от двигателя и применяется в транспортном средстве 100, как будет описано ниже.
[0059] Как показано на фиг. 1, транспортное средство 100 согласно настоящему варианту осуществления изобретения представляет собой гибридное транспортное средство (ГТС), включающее в себя двигатель 1 (двигатель внутреннего сгорания), первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 в качестве источников мощности, то есть первичных двигателей. Транспортное средство 100 может представлять собой гибридное транспортное средство (ГТС), подзаряжаемое от сети (ГТСПС), подзаряжаемое от внешнего источника энергии. Как показано на фиг. 1 и фиг. 2, транспортное средство 100 включает в себя двигатель 1, первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первую вращающуюся электрическую машину (электродвигатель/генератор) MG1, вторую вращающуюся электрическую машину MG2, сцепление (первое сцепление) CL1, сцепление (второе сцепление) CLr, тормоз BL1, дифференциал 30, электронный блок 50 управления гибридным транспортным средством (блок 50 ЭБУ _ ГТС), электронный блок 60 управления электроавтомобилем (блок 60 ЭБУ _ ЭТС и электронный блок 70 управления двигателем (блок 70 ЭБУ). В частности, система ТМ1 передачи мощности согласно первому варианту осуществления установлена между любым двигателем 1 и двумя вращающимися электрическими машинами MG1, MG2, и парой ведущих колес W. Система ТМ1 передачи мощности включает в себя первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первое сцепление CL1, второе сцепление CLr и тормоз BL1.
[0060] Двигатель 1 представляет собой двигатель внутреннего сгорания, который преобразует энергию сгорания топлива во вращательное движение своего выходного вала и выдает вращательное движение. Выходной вал двигателя 1 соединен с входным валом 2 системы ТМ1 передачи мощности. Входной вал 2 расположен коаксиально с выходным валом двигателя 1 вдоль протяжения линии выходного вала. Входной вал 2 соединен с первой солнечной шестерней 11 первого планетарного зубчатого механизма 10.
[0061] Первый планетарный зубчатый механизм 10 соединен с двигателем 1, и установлен на транспортном средстве 100 в качестве первого дифференциального механизма. Первый дифференциальный механизм передает вращение от двигателя 1. Первый планетарный зубчатый механизм 10 представляет собой дифференциальный механизм с входной стороны, и расположен с противоположной стороны от двигателя 1 относительно второго планетарного зубчатого механизма 20. Первый планетарный зубчатый механизм 10 относится к одноступенчатому типу и включает в себя первую солнечную шестерню 11, первые ведущие шестерни 12, первую кольцевую шестерню 13 и первое водило 14. В настоящем первом варианте осуществления изобретения первая солнечная шестерня 11 соответствует первому вращающемуся элементу, первая кольцевая шестерня 13 соответствует третьему вращающемуся элементу, и первое водило 14 соответствует второму вращающемуся элементу.
[0062] Первая солнечная шестерня 11 соединена с входным валом 2 и вращается как одно целое с входным валом 2. Первая кольцевая шестерня 13 расположена коаксиально с первой солнечной шестерней 11 радиально с внешней стороны первой солнечной шестерни 11. Первые ведущие шестерни 12 расположены между первой солнечной шестерней 11 и первой кольцевой шестерней 13. Каждая из первых ведущих шестерен 12 находится в зацеплении с первой солнечной шестерней 11 и первой кольцевой шестерней 13. Первые ведущие шестерни 12 приводятся во вращение первым водилом 14. Каждая из первых ведущих шестерен 12 может вращаться вокруг центральной оси входного вала 2 вместе с первым водилом 14 и поддерживается первым водилом 14 с возможностью вращения вокруг центральной оси первой ведущей шестерни 12.
[0063] Первое сцепление CL1 представляет собой устройство сцепления (блок сцепления), выполненное с возможностью соединять с возможностью расцепления первую солнечную шестерню 11 с первым водилом 14. Первое сцепление CL1 может представлять собой, например, фрикционное сцепление; однако, первое сцепление CL1 не ограничивается фрикционным сцеплением. В настоящем варианте осуществления изобретения первое сцепление CL1 управляется гидравлическим давлением для того, чтобы получить состояние сцеплено (включающее в себя полностью зацепленное состояние) или состояние расцепления. В состоянии полностью сцеплено (далее именуемое просто сцеплено) первое сцепление CL1 соединяет первую солнечную шестерню 11 с первым водилом 14 и вращает как одно целое первую солнечную шестерню 11 и первое водило 14. Полностью зацепленное первое сцепление CL1 ограничивает относительное движение первого планетарного зубчатого механизма 10. С другой стороны, в состоянии расцепления (незацепленное) первое сцепление CL1 разъединяет первую солнечную шестерню 11 с первым водилом 14 и обеспечивает относительное вращение между первой солнечной шестерней 11 и первым водилом 14. То есть в состоянии расцепления первое сцепление CL1 обеспечивает относительное движение первого планетарного зубчатого механизма 10. Первое сцепление CL1 может переводиться в состояние проскальзывания, которое представляет собой полузацепленное состояние. Первое сцепление CL1 в состоянии проскальзывания обеспечивает относительное движение первого планетарного зубчатого механизма 10.
[0064] Тормоз BL1 представляет собой тормозное устройство в качестве устройства сцепления (блока сцепления), которое способно запретить вращение первой кольцевой шестерни 13. По меньшей мере, либо тормоз BL1, либо первое сцепление CL1 соответствует первому блоку сцепления согласно объекту изобретения. Тормоз BL1 включает в себя элемент сцепления, соединенный с первой кольцевой шестерней 13, а также элемент сцепления, соединенный с кузовной стороной транспортного средства, например, корпусом (неподвижным элементом) системы передачи мощности. Тормоз BL1 способен соединять с возможностью расцепления первую кольцевую шестерню 13 с корпусом. Тормоз BL1, а также первое сцепление CL1, может представлять собой фрикционное сцепление; однако, тормоз BL1 не ограничивается фрикционным сцеплением. В настоящем варианте осуществления изобретения, тормоз BL1 управляется гидравлическим давлением для того, чтобы получить состояние сцеплено (включающее в себя полностью зацепленное состояние) или состояние расцепления. В состоянии полностью сцеплено (далее именуется просто сцеплено) тормоз BL1 соединяет первую кольцевую шестерню 13 с кузовной стороной транспортного средства, то есть с неподвижным элементом, и ограничивает вращение первой кольцевой шестерни 13. С другой стороны, в состоянии расцепления (незацепленный) тормоз BL1 разъединяет первую кольцевую шестерню 13 с неподвижным элементом и обеспечивает вращение первой кольцевой шестерни 13. Тормоз BL1 может переводиться в состояние проскальзывания, которое представляет собой полузацепленное состояние. Проскальзывающий тормоз BL1 обеспечивает вращение первой кольцевой шестерни 13.
[0065] Второй планетарный зубчатый механизм 20 согласно первому варианту осуществления изобретения установлен на транспортном средстве 100 в качестве второго дифференциального механизма. Второй дифференциальный механизм соединяет первый планетарный зубчатый механизм 10 с ведущими колесами W. Второй планетарный зубчатый механизм 20 расположен коаксиально с первым планетарным зубчатым механизмом 10 на стороне двигателя по отношению к первому планетарному зубчатому механизму 10. Второй планетарный зубчатый механизм 20 представляет собой дифференциальный механизм на стороне выхода, расположенный со стороны ведущих колес W по отношению к первому планетарному зубчатому механизму 10. Второй планетарный зубчатый механизм 20 относится к одноступенчатому типу и включает в себя вторую солнечную шестерню 21, вторые ведущие шестерни 22, вторую кольцевую шестерню 23 и второе водило 24. В первом варианте осуществления изобретения, вторая солнечная шестерня 21 соответствует пятому вращающемуся элементу. Вторая кольцевая шестерня 23 соответствует шестому вращающемуся элементу, а второе водило 24 соответствует четвертому вращающемуся элементу.
[0066] Вторая кольцевая шестерня 23 расположена коаксиально со второй солнечной шестерней 21 в радиальном направлении на наружной стороне второй солнечной шестерни 21. Вторые ведущие шестерни 22 расположены между второй солнечной шестерней 21 и второй кольцевой шестерней 23. Каждая из вторых ведущих шестерен 22 находится в зацеплении со второй солнечной шестерней 21 и второй кольцевой шестерней 23. Каждая из вторых ведущих шестерен 22 поддерживается с возможностью вращения вторым водилом 24. Второе водило 24 соединено с первым водилом 14 первого планетарного зубчатого механизма 10 и вращается как одно целое с первым водилом 14. Каждая из вторых ведущих шестерен 22 может вращаться вокруг центральной оси входного вала 2 вместе со вторым водилом 24 и поддерживается вторым водилом 24 с возможностью вращения вокруг центральной оси второй ведущей шестерни 22. Первое водило 14 представляет собой выходной элемент первого планетарного зубчатого механизма 10. Первое водило 14 способно выдавать вращение, сообщаемое от двигателя 1 первому планетарному зубчатому механизму 10, на второе водило 24.
[0067] Вал 33 ротора первой вращающейся электрической машины MG1 соединен со второй солнечной шестерней 21. Вал 33 ротора первой вращающейся электрической машины MG1 расположен коаксиально с входным валом 2 и вращается как одно целое со второй солнечной шестерней 21. Ведущая шестерня 25 контрпривода соединена со второй кольцевой шестерней 23. Ведущая шестерня 25 контрпривода вращается как одно целое со второй кольцевой шестерней 23. Вторая кольцевая шестерня 23 представляет собой выходной элемент, который способен выдавать вращение, сообщаемое от первой вращающейся электрической машины MG1 или первого планетарного зубчатого механизма 10 на ведущие колеса W и вторую вращающуюся электрическую машину MG2.
[0068] Второе сцепление CLr выполнено с возможностью соединять с возможностью расцепления первую кольцевую шестерню 13 со второй солнечной шестерней 21. Второе сцепление CLr соответствует второму блоку сцепления согласно объекту изобретения. Как видно из последующего описания, второе сцепление CLr или второй блок сцепления служит в качестве переключающего устройства, которое способно изменять коэффициент распределения мощности в первом планетарном зубчатом механизме 10 и втором планетарном зубчатом механизме 20 системы ТМ1 передачи мощности. Второе сцепление CLr может представлять собой, например, фрикционное сцепление; однако второе сцепление CLr не ограничивается фрикционным сцеплением. В настоящем варианте осуществления изобретения второе сцепление CLr расположено радиально на внутренней стороне первой вращающейся электрической машины MG1. В настоящем варианте осуществления изобретения второе сцепление CLr управляется гидравлическим давлением для того, чтобы получить состояние сцеплено (включающее в себя полностью зацепленное состояние) или состояние расцепления. В состоянии полностью сцеплено (далее именуемое просто сцеплено) второе сцепление CLr соединяет первую кольцевую шестерню 13 со второй солнечной шестерней 21 и вращает как одно целое первую кольцевую шестерню 13 и вторую солнечную шестерню 21. При такой конфигурации можно распределять мощность от двигателя 1 между стороной первой вращающейся электрической машины MG2 и стороной колес в гибридном режиме (режиме ГТС) (описанном выше) при коэффициенте распределения мощности, отличном от коэффициента распределения мощности, соответствующего передаточному числу второго планетарного зубчатого механизма 20. С другой стороны, расцепленное (незацепленное) второе сцепление CLr разъединяет первую кольцевую шестерню 13 со второй солнечной шестерней 21, и позволяет мощности от двигателя 1, сообщаемой первым планетарным зубчатым механизмом 10 на второй планетарный зубчатый механизм 20, распределяться при коэффициенте распределения мощности, соответствующем передаточному числу второго планетарного зубчатого механизма 20. Второе сцепление CLr может переводиться в состояние проскальзывания, которое представляет собой полузацепленное состояние.
[0069] Ведущая шестерня 25 контрпривода находится в зацеплении с ведущей шестерней 26 контрпривода. Ведущая шестерня 26 контрпривода соединена с ведущей шестерней 28 привода через передаточный вал 27. Редуктор 35 находится в зацеплении с ведущей шестерней 26 контрпривода. Редуктор 35 соединен с валом 33 ротора второй вращающейся электрической машины MG2. То есть вращение второй вращающейся электрической машины MG2 передается на ведущую шестерню 26 контрпривода через редуктор 35. Редуктор 35 имеет меньший диаметр, чем ведущая шестерня 26 контрпривода. Редуктор 35 уменьшает обороты второй вращающейся электрической машины MG2 и передает вращение на ведущую шестерню 26 контрпривода.
[0070] Ведущая шестерня 28 привода находится в зацеплении с дифференциальной кольцевой шестерней 29 дифференциала 30. Дифференциал 30 соединен с ведущими колесами W через правую и левую оси 31.
[0071] Таким образом, вторая кольцевая шестерня 23 соединена с ведущими колесами W через ведущую шестерню 25 контрпривода, ведущую шестерню 26 контрпривода, передаточный вал 27, ведущую шестерню 28 привода, дифференциал 30 и оси 31. Вторая вращающаяся электрическая машина MG2 соединена с контуром передачи движущей силы между второй кольцевой шестерней 23 и ведущими колесами W. Вторая вращающаяся электрическая машина MG2 способна передавать мощность (движущую силу) на вторую кольцевую шестерню 23 и ведущие колеса W.
[0072] Каждая первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 имеет функцию электрического двигателя (электрического мотора) и функцию генератора. Каждая первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 соединена с аккумулятором через инвертор. Каждая первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 способна преобразовывать электрическую мощность, которая подается из аккумулятора, в механическую мощность, и выдавать механическую мощность, и также способна преобразовывать механическую мощность в электрическую энергию при приведении в действие входной мощностью. Электрическая энергия, генерируемая вращающимися электрическими машинами MG1, MG2, заряжает аккумулятор. Каждая первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 может представлять собой, например, синхронный электрический трехфазный двигатель-генератор переменного тока с постоянным магнитом, и может также являться вращающейся машиной другого типа, например, гидравлическим двигателем.
[0073] Как показано на фиг. 2, транспортное средство 100 включает в себя блок ЭБУ_ГТС 50, блок ЭБУ_ЭТС 60 и блок ЭБУ 70 управления двигателем. Каждый блок ЭБУ 50, 60, 70 представляет собой электронный блок управления, включающий в себя компьютер. Блок ЭБУ_ГТС 50 имеет функцию управления всем транспортным средством 100. Блок ЭБУ_ЭТС 60 и блок ЭБУ 70 двигателя каждый электрически соединен с блоком ЭБУ_ГТС 50. Блок ЭБУ_ГТС 50, блок ЭБУ_ЭТС 60 и блок ЭБУ 70 двигателя могут быть выполнены, по существу, в целом как единый электронный блок управления.
[0074] Блок ЭБУ_ЭТС 60 способен управлять первой вращающейся электрической машиной MG1 и второй вращающейся электрической машиной MG2. Например, блок ЭБУ_ЭТС 60 способен управлять скоростью вращения первой вращающейся электрической машины MG1 путем управления частотой тока, подаваемого на первую вращающуюся электрическую машину MG1, и способен управлять скоростью вращения второй вращающейся электрической машины MG2 путем управления частотой тока, подаваемого на вторую вращающуюся электрическую машину MG2. Блок ЭБУ_ЭТС 60 также способен управлять выходным крутящим моментом первой вращающейся электрической машины MG1 путем регулировки величины поступающего тока и способен управлять выходным крутящим моментом второй вращающейся электрической машины MG2 путем регулировки величины поступающего тока.
[0075] Блок ЭБУ 70 двигателя способен управлять двигателем 1. Например, блок ЭБУ 70 двигателя способен управлять степенью открывания электронного дроссельного клапана двигателя 1, управлять зажиганием двигателя 1 путем выдачи сигнала зажигания, а также управлять впрыском топлива в двигатель 1. Блок ЭБУ 70 двигателя способен управлять выходным крутящим моментом двигателя 1 через управление степенью открывания электронного дроссельного клапана, осуществлять управление зажиганием, осуществлять управление впрыском и пр.
[0076] Датчик скорости транспортного средства, датчик величины перемещения акселератора, датчик скорости вращения MG1, датчик скорости вращения MG2, датчик скорости вращения выходного вала, датчик аккумулятора и пр. соединены с блоком ЭБУ_ГТС 50. С этими датчиками блок ЭБУ_ГТС 50 способен получить значения скорости транспортного средства, величины перемещения акселератора, скорости вращения первой вращающейся электрической машины MG1, скорости вращения второй вращающейся электрической машины MG2, скорости вращения выходного вала (передаточного вала 27) системы ТМ1 передачи мощности, состояние зарядки СЗ аккумулятора и пр.
[0077] Блок ЭБУ_ГТС 50 способен вычислить требуемую движущую силу, требуемую мощность, требуемый крутящий момент и пр. для транспортного средства 100 на основе полученных элементов информации. Блок ЭБУ_ГТС 50 определяет выходной крутящий момент (крутящий момент MG1) первой вращающейся электрической машины MG1, выходной крутящий момент (крутящий момент MG2) второй вращающейся электрической машины MG2 и выходной крутящий момент (крутящий момент двигателя) двигателя 1 на основе вычисленной требуемой величины, и определяет совокупный выходной крутящий момент этих выходных крутящих моментов. Блок ЭБУ_ГТС 50 выдает командную величину крутящего момента MG1 и командную величину крутящего момента MG2 на блок ЭБУ_ЭТС 60. Блок ЭБУ_ГТС 50 выдает командную величину крутящего момента двигателя на блок ЭБУ 70 двигателя.
[0078] Блок ЭБУ_ГТС 50 имеет функцию блока управления для первого сцепления CL1, второго сцепления CLr и тормоза BL1. Блок ЭБУ_ГТС 50 управляет статусами (то есть величинами подаваемого гидравлического давления) первого сцепления, второго сцепления CLr и тормоза BL1 на основе выбранного режима привода (описанного выше) и пр. Блок ЭБУ_ГТС 50 выдает командную величину гидравлического давления (давление для зацепления) P_CL1, подаваемого на первое сцепление CL1, командную величину гидравлического давления (давления для зацепления) P_CLr, подаваемого на второе сцепление CLr, и командную величину гидравлического давления (давления для зацепления) P_BL1, подаваемого на тормоз BL1. Гидравлический контроллер (не показан) управляет величинами гидравлического давления, которые соответственно подаются на сцепления CL1, CLr и тормоз BL1 в ответ на командные величины давления для зацепления P_CL1, P_CLr, Р_BL1. В частности, что касается управления величинами гидравлического давления, которые соответственно подаются на сцепления CL1, CLr и тормоз BL1, то блок ЭБУ_ГТС 50 имеет программы, данные, и пр., заранее определяемые экспериментально, и осуществляет управление величинами подаваемого гидравлического давления на основе этих программ, данных, и пр. В частности, эти программы, данные, и пр., определяются с учетом эксплуатационных характеристик и первой, и второй вращающийся электрической машины MG1, MG2, и рабочих характеристик в приводных режимах (описанных далее). Блок ЭБУ_ГТС 50 выбирает оптимальный режим привода на основе рабочего состояния (например, величины перемещения акселератора) транспортного средства и пр., и управляет величинами гидравлического давления, которые соответственно подаются на сцепления CL1, CLr и тормоз BL1.
[0079] Транспортное средство 100 способно селективно осуществлять движение в гибридном режиме (ГТС) или режиме с электроприводом ЭТС. Режим привода ГТС представляет собой режим привода, в котором транспортное средство 100 движется при использовании двигателя 1 в качестве источника мощности. В режиме привода ГТС, в дополнение к двигателю 1, вторая вращающаяся электрическая машина MG2 может дополнительно использоваться в качестве источника мощности. Режим привода ЭТС представляет собой режим привода, в котором транспортное средство 100 движется с использованием, по меньшей мере, одной из машин - первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2 в качестве источника мощности. В режиме привода ЭТС транспортное средство 100 способно двигаться при остановленном двигателе 1.
[0080] В настоящем варианте осуществления изобретения, транспортное средство 100 имеет режим ЭТС с одним электрическим двигателем и режим ЭТС с двумя электрическими двигателями в качестве режима привода для ЭТС. Режим ЭТС с одним электрическим двигателем представляет собой режим, в котором транспортное средство 100 движется при использовании второй вращающейся электрической машины MG2 в качестве единственного источника мощности. Режим ЭТС с двумя электрическими двигателями представляет собой режим, в котором транспортное средство 100 движется при использовании первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2 в качестве источников мощности. Далее эти режимы привода ЭТС будут первоначально описаны.
[0081] На диаграмме работы сцепления на фиг. 3 значок - кружок - в столбце первого сцепления CL1, столбце тормоза BL1 и столбце второго сцепления CLr обозначает зацепленное состояние, а пропуск обозначает расцепленное состояние или незацепленное состояние. Значок - треугольник - обозначает, что любое одно из сцеплений - первое сцепление CL1 или второе сцепление CLr зацеплено, а другое сцепление расцеплено. На номограммах с фиг. 4А - 4Н, фиг. 10А - 10G, фиг. 13А - 13G, и фиг. 16А - 16Н, которые будут описаны ниже, значок - незакрашенный квадрат - обозначает вращающийся элемент, с которым соединена первая вращающаяся электрическая машина MG1, значок - закрашенный кружок - обозначает вращающийся элемент, соединенный со второй вращающейся электрической машиной MG2 (то есть выходной элемент второго планетарного зубчатого механизма 20), значок - незакрашенный кружок - обозначает вращающийся элемент, соединенный с двигателем 1, и - стрелка - обозначает выходной крутящий момент (мощность) соответствующего вращающегося элемента. На этих номограммах нарисованное линиями сцепление CL1 обозначает расцепленное состояние, а заштрихованное сцепление CL1 обозначает зацепленное состояние. На этих номограммах линия, относящаяся к первому планетарному зубчатому механизму 10, обозначена сплошной линией, а линия, относящаяся ко второму планетарному зубчатому механизму 20, обозначена штриховой линией.
[0082] Фиг. 4А представляет собой номограмму, относящуюся к режиму ЭТС с одним электрическим двигателем. На номограмме ссылочные позиции S1, C1, R1 соответственно обозначают первую солнечную шестерню 11, первое водило 14 и первую кольцевую шестерню 13, а ссылочные позиции S2, С2, R2 соответственно обозначают вторую солнечную шестерню 21, второе водило 24 и вторую кольцевую шестерню 23.
[0083] В режиме ЭТС с одним электрическим двигателем, первое сцепление CL1, тормоз BL1 и второе сцепление CLr расцеплены. Поскольку тормоз BL1 расцеплен, разрешено вращение первой кольцевой шестерни 13. Поскольку первое сцепление CL1 расцеплено, создается относительное движение первого планетарного зубчатого механизма 10. Блок ЭБУ_ГТС 50 заставляет транспортное средство 100 генерировать движущую силу в направлении движения вперед, заставляя вторую вращающуюся электрическую машину MG2 выдавать положительный крутящий момент, через блок ЭБУ_ЭТС 60. Вторая кольцевая шестерня 23 вращается в положительном направлении синхронно с вращением ведущих колес W. Вращение в положительном направлении формируется как вращение второй кольцевой шестерни 23 в то время, когда транспортное средство 100 движется вперед. Первое водило 14 вращается совместно со вторым водилом 24 в положительном направлении. Первый и второй планетарные зубчатые механизмы 10, 20 находятся в нейтральном состоянии, где каждый из узлов - первое сцепление CL1, второе сцепление CLr и тормоз BL1 расцеплены, при этом двигатель 1 и первая вращающаяся электрическая машина MG1 не вращаются совместно, а первая солнечная шестерня 11 и вторая солнечная шестерня 21 останавливают вращение.
[0084] Когда транспортное средство 100 движется в режиме ЭТС с одним электрическим двигателем, возможен случай, когда состояние зарядки аккумулятора становится полным и, в результате, регенеративную энергию нельзя возвратить. В этом случае можно дополнительно использовать торможение двигателем. Когда первое сцепление CL1 или второе сцепление CLr сцеплены, двигатель 1 соединен с ведущими колесами W, при этом можно выполнить торможение двигателем на ведущих колесах W. Как обозначено треугольными значками на фиг. 3, когда первое сцепление CL1 или второе сцепление CLr сцеплено в режиме ЭТС с одним электрическим двигателем, двигатель 1 переходит в состояние согласованного вращения, и состояние торможения двигателем устанавливается путем увеличения оборотов двигателя с использованием первой вращающейся электрической машины MG1.
[0085] В режиме ЭТС с двумя электрическими двигателями, блок ЭБУ_ГТС 50 включает первое сцепление CL1 и тормоз BL1 (второе сцепление CLr расцеплено). Фиг. 4В представляет собой номограмму, относящуюся к режиму ЭТС с двумя электрическими двигателями. Поскольку первое сцепление CL1 сцеплено, относительное движение первого планетарного зубчатого механизма 10 запрещено. Поскольку тормоз BL1 сцеплен, вращение первой кольцевой шестерни 13 запрещено. Поэтому вращение всех вращающихся элементов первого планетарного зубчатого механизма 10 останавливается. Поскольку вращение первого водила 14, которое представляет собой выходной элемент, запрещено, второе водило 24, соединенное с первым водилом 14, блокируется на нулевой скорости вращения.
[0086] Блок ЭБУ_ГТС 50 заставляет каждую из электрических машин - первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 выдавать крутящий момент, чтобы придать движение транспортному средству 100. Поскольку вращение второго водила 24 запрещено, второе водило 24 вырабатывает силу противодействия крутящему моменту первой вращающейся электрической машины MG1, при этом можно выдавать крутящий момент первой вращающейся электрической машины MG1 со второй кольцевой шестерни 23. Первая вращающаяся электрическая машина MG1 способна выдавать положительный крутящий момент на выход из второй кольцевой шестерни 23, выдавая отрицательный крутящий момент, чтобы вращаться в отрицательном направлении в то время, когда транспортное средство 100 движется вперед. С другой стороны, когда транспортное средство 100 движется назад, первая вращающаяся электрическая машина MG1 способна выдавать отрицательный крутящий момент на выход из второй кольцевой шестерни 23, выдавая положительный крутящий момент, чтобы вращаться в положительном направлении.
[0087] Режим привода ГТС согласно первому варианту осуществления изобретения включает в себя первый режим ГТС (режим повышающей передачи (ПОВ/П) на первичном валу), второй режим ГТС (режим понижающей передачи (ПОН/П) на первичном валу) и третий режим ГТС (режим фиксированной передачи).
[0088] Сначала будет описан первый режим ГТС. В режиме привода ГТС в первом режиме ГТС, второй планетарный зубчатый механизм 20 находится главным образом в состоянии дифференциала, и первый планетарный зубчатый механизм 10, который служит в качестве трансмиссионного блока, переключается между низкой передачей (Lo) и высокой передачей (Hi). Фиг. 4С представляет собой номограмму, относящуюся к режиму привода на низкой передаче (режиму ПОВ/П Lo) в режиме привода ГТС в первом режиме ГТС. Фиг. 4D представляет собой номограмму, относящуюся к режиму привода на высокой передаче (режиму ПОВ/П Hi) в режиме привода ГТС в первом режиме ГТС. В первом режиме ГТС второе сцепление CLr расцеплено (установлено в незацепленное состояние).
[0089] В режиме ПОВ/П с шестерней Lo, блок ЭБУ_ГТС 50 выключает первое сцепление CL1 и включает тормоз BL1 (выключает второе сцепление CLr). Поскольку тормоз BL1 находится в состоянии сцепления, вращение первой кольцевой шестерни 13 запрещено. Мощность двигателя 1 передается от первого водила 14 на второе водило 24. Вращение (двигателя 1), сообщенное второму водилу 24, увеличивается по скорости во втором планетарном зубчатом механизме 20, и выдается от второй кольцевой шестерни 23. То есть устанавливается состояние повышенной передачи (ПОВ/П).
[0090] В режиме ПОВ/П с шестерней Hi блок ЭБУ_ГТС 50 включает первое сцепление CL1 и выключает тормоз BL1 (расцепляет второе сцепление CLr). Поскольку первое сцепление CL1 сцеплено, относительное движение первого планетарного зубчатого механизма 10 запрещено, и первая солнечная шестерня 11, первая кольцевая шестерня 13, и первое водило 14 первого планетарного зубчатого механизма 10 вращаются как одно целое. В первом варианте осуществления изобретения, первое водило 14 первого планетарного зубчатого механизма 10 соединено со вторым водилом 24 второго планетарного зубчатого механизма 20, при этом вращение двигателя 1 увеличивается по скорости во втором планетарном зубчатом механизме 20 и выдается от второй кольцевой шестерни 23. То есть устанавливается состояние повышенной передачи (ПОВ/П).
[0091] В то время, когда транспортное средство 100 движется назад в первом режиме ГТС, как в случае режима ПОВ/П с шестерней Hi, блок ЭБУ_ГТС 50 включает первое сцепление CL1 и выключает тормоз BL1 (расцепляет второе сцепление CLr). Как показано на номограмме на фиг. 4Е, когда двигатель 1 приводится в действие, первая вращающаяся электрическая машина MG1 регенерирует электрическую энергию, а вторая вращающаяся электрическая машина MG2 работает в режиме мотора, так, чтобы вращаться в отрицательном направлении с отрицательным крутящим моментом, что дает возможность вращать вторую кольцевую шестерню 23 в обратном направлении.
[0092] Далее будет описан второй режим ГТС. На Фиг. 4F представлена номограмма, относящаяся ко второму режиму ГТС. Во втором режиме ГТС блок ЭБУ_ГТС 50 выключает и первое сцепление CL1, и тормоз BL1, и включает второе сцепление CLr. Когда второе сцепление CLr сцеплено, первая кольцевая шестерня 13 соединена со второй солнечной шестерней 21, чтобы расположиться в соединенном состоянии в дополнение к соединению первого водила 14 со вторым водилом 24 между первым планетарным зубчатым механизмом 10 и вторым планетарным зубчатым механизмом 20. Таким образом, на номограмме на фиг. 4F линия, относящаяся к первому планетарному зубчатому механизму 10 (непрерывная линия), и линия, относящаяся ко второму планетарному зубчатому механизму 20 (пунктирная линия), накладываются друг на друга с тем результатом, что возникает единственная линия. То есть на номограммах фиг. 4А - 4Е имеются две линии, то есть линия, относящаяся к первому планетарному зубчатому механизму 10, и линия, относящаяся ко второму планетарному зубчатому механизму 20. В частности, в первом режиме ГТС, показанном на фиг. 4С - 4Е, мощность от двигателя 1, сообщенная второму водилу 24 второго планетарного зубчатого механизма 20 через первый планетарный зубчатый механизм 10, распределяется между первой вращающейся электрической машиной MG1 (то есть второй солнечной шестерней 21) и выходным элементом (то есть второй кольцевой шестерней 23) второго планетарного зубчатого механизма 20 при первом коэффициенте распределения мощности (передаточном числе), основанном на числе зубьев шестерни каждого из вращающихся элементов второго планетарного зубчатого механизма 20. Напротив, во втором режиме ГТС, как можно понять из фиг. 4F, можно распределять мощность от двигателя 1 между второй солнечной шестерней 21 и второй кольцевой шестерней 23 при втором коэффициенте распределения мощности (коэффициенте распределения мощности, основанном на числе зубьев шестерни каждого из вращающихся элементов первого планетарного зубчатого механизма 10 и второго планетарного зубчатого механизма 20), отличном от коэффициента распределения мощности в первом режиме ГТС. Во втором режиме ГТС вращение двигателя 1 уменьшается по скорости и выдается от второй кольцевой шестерни 23. То есть устанавливается состояние пониженной передачи (ПОН/П), движение задним ходом включается при вращении первой вращающейся электрической машины MG1 в противоположном направлении.
[0093] Далее будет описан третий режим ГТС. На Фиг. 4G представлена номограмма, относящаяся к режиму фиксированной передачи с прямым соединением. На Фиг. 4Н представлена номограмма, относящаяся к режиму (ПОН/П) пониженной фиксированной передачи. В режиме фиксированной передачи с прямым соединением, блок ЭБУ_ГТС 50 включает и первое сцепление CL1, и второе сцепление CLr, и выключает тормоз BL1. Поскольку первое и второе сцепления CL1 и CLr сцеплены, относительное движение каждого из узлов - первого планетарного зубчатого механизма 10 и второго планетарного зубчатого механизма 20 запрещено. Таким образом, можно непосредственно выдавать мощность двигателя 1 от второй кольцевой шестерни 23.
[0094] В режиме (ПОН/П) пониженной фиксированной передачи блок ЭБУ_ГТС 50 выключает первое сцепление CL1 и включает и тормоз BL1, и второе сцепление CLr. Поскольку тормоз BL1 сцеплен, вращение первой кольцевой шестерни 13 запрещено. Поскольку второе сцепление CLr сцеплено, первая кольцевая шестерня 13 соединяется со второй солнечной шестерней 21, чтобы быть расположенной в соединенном состоянии в дополнение к соединению первого водила 14 со вторым водилом 24 между первым планетарным зубчатым механизмом 10 и вторым планетарным зубчатым механизмом 20. Поэтому вращение двигателя 1 уменьшается по скорости и выдается от второй кольцевой шестерни 23. То есть устанавливается состояние пониженной передачи (ПОН/П). Режим (ПОН/П) пониженной фиксированной передачи предпочтителен во время подъема на возвышенности, буксировки и пр. Это объясняется тем, что в режиме (ПОН/П) пониженной фиксированной передачи первой вращающейся электрической машине MG1 трудно перегреться. По этой причине режим (ПОН/П) пониженной фиксированной передачи предпочтителен в то время, когда ускоряющая сила увеличивается с помощью второй вращающейся электрической машины MG2.
[0095] Как описано выше, можно менять коэффициент распределения мощности в системе ТМ1 передачи мощности между первым режимом ГТС и вторым режимом ГТС. В первом режиме ГТС второе сцепление CLr находятся в состоянии не сцеплено, а первое сцепление CL1 или тормоз BL1 в состоянии сцеплено. Во втором режиме ГТС второе сцепление CLr сцеплено, при этом и первое сцепление CL1 и тормоз BL1 расцеплены. Таким образом, путем соответствующего выбора и установки этих первого и второго режимов ГТС, можно доводить крутящий момент и вращение первой вращающейся электрической машины MG1 до значений, приемлемых для характеристик (параметров) первой вращающейся электрической машины MG1.
[0096] Как показано на фиг. 5, абсолютная величина отношения крутящих моментов (Tg/Te) и в первом режиме ГТС (ПОВ/П), и во втором режиме ГТС (ПОН/П) постоянна независимо от коэффициента редукции (Ne/No).
[0097] С другой стороны, как показано на фиг. 6, в области, в которой коэффициент редукции (Ne/No) системы передачи мощности относительно велик, абсолютная величина отношения скоростей вращения (Ng/Ne) во втором режиме ГТС (ПОН/П) меньше, чем абсолютная величина отношения скоростей вращения (Ng/Ne) в первом режиме ГТС (ПОВ/П). Поэтому в области, в которой коэффициент редукции относительно велик, можно уменьшить возрастание скорости Ng вращения MG1 путем установки второго режима ГТС (ПОН/П). С другой стороны, в области «b», в которой коэффициент редукции относительно мал, абсолютная величина отношения скоростей вращения (Ng/Ne) в первом режиме ГТС (ПОВ/П) меньше, чем абсолютная величина отношения скоростей вращения ((Ng/Ne) во втором режиме ГТС (ПОН/П). Поэтому в области «b», в которой коэффициент редукции относительно мал, можно уменьшить возрастание скорости Ng вращения MG1 путем установки первого режима ГТС (ПОВ/П).
[0098] Отношение мощностей (Pg/Pe) равно произведению отношения крутящих моментов (Tg/Te) и отношения скоростей вращения (Ng/Ne). Поэтому, как показано на фиг. 7, в области «с», в которой коэффициент редукции относительно велик, абсолютная величина отношения мощностей (Pg/Pe) во втором режиме ГТС (ПОН/П) меньше, чем абсолютная величина отношения мощностей (Pg/Pe) в первом режиме ГТС (ПОВ/П). Поэтому в области «с», в которой коэффициент редукции относительно велик, можно уменьшить возрастание мощности Pg MG1 путем установки второго режима ГТ (ПОН/П). С другой стороны, в области «d», в которой коэффициент редукции относительно мал, абсолютная величина отношения мощностей (Pg/Pe) в первом режиме ГТС (ПОВ/П) меньше, чем абсолютная величина отношения мощностей (Pg/Pe) во втором режиме ГТС (ПОН/П). Поэтому в области «d», в которой коэффициент редукции относительно мал, можно уменьшить возрастание мощности MG1 путем установки первого режим ГТС (ПОВ/П).
[0099] По этой причине путем выбора и установки режима ГТС, в котором отношение мощностей (Pg/Pe) относительно небольшое, в соответствии с уменьшением этого соотношения, можно уменьшить возрастание мощности MG1, можно уменьшить возрастание скорости вращения MG1 или крутящего момента MG1, и можно уменьшить возрастание номинальной скорости вращения MG1 или номинального крутящего момента MG1.
[0100] В первом варианте осуществления изобретения первый планетарный зубчатый механизм 10 и второй планетарный зубчатый механизм 20 разработаны или подобраны так, что коэффициент распределения мощности меняется между первым режимом ГТС и вторым режимом ГТС. Это может быть понятно из того, что на номограммах вертикальная линия, относящаяся к первому и второму водилу 14, 24, отклоняется от линии, относящейся ко второй кольцевой шестерни 23, и соответствующего соотношения в размерах, расположению и пр. среди вращающихся элементов на фиг. 1. Особенности разработки или выбора по изменению коэффициента распределения мощности между первым режимом ГТ и вторым режимом ГТ сходным образом проявляются в других вариантах осуществления, которые будут описаны ниже.
[0101] Состояние повышающей передачи и состояние понижающей передачи переключаются путем изменения режима привода между первым режимом ГТС и вторым режимом ГТС, при этом система ТМ1 передачи мощности обеспечивает расширение диапазона передаточных чисел трансмиссии.
[0102] В первом варианте осуществления изобретения первый режим ГТС предпочтительно выбирается при работе при низкой нагрузке или высокой скорости, а второй режим ГТС предпочтительно выбирается при работе при высокой нагрузке. При такой конфигурации возрастание крутящего момента или скорости вращения первой вращающейся электрической машины MG1 уменьшается. Вышеописанные программы и пр. блока ЭБУ_ГТС 50 предпочтительно строятся на основе этой соотношений.
[0103] Второй вариант осуществления изобретения будет описан со ссылкой на фиг. 8-10G. Второй вариант осуществления изобретения относится к системе ТМ2 передачи мощности для передачи мощности от двигателя 1, и применяется на транспортном средстве 200, как и в случае с первым вариантом осуществления. В нижеследующем описании одинаковые ссылочные позиции обозначают компоненты, имеющие функции, аналогичные тем компонентам, что уже описаны в первом варианте осуществления, и их описание опускается. Далее, описание пунктов, которые очевидны специалистам в данной области техники, путем обращения к описанию первого варианта осуществления изобретения, опускается или упрощается, и будут в основном описаны характерная конфигурация и функции второго варианта осуществления изобретения. Модификации и изменения, описанные в первом варианте осуществления, также аналогичным образом применяется ко второму варианту осуществления изобретения, если только нет несоответствия.
[0104] Как показано на фиг. 8, транспортное средство 200 согласно второму варианту осуществления изобретения представляет собой гибридное транспортное средство (ГТС), включающее в себя двигатель 1, первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2. Транспортное средство 200 включает в себя двигатель 1, первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, сцепление (первое сцепление) CL1, сцепление (второе сцепление) CLr, тормоз BL1, дифференциал 30, блоки ЭБУ_ГТС 50, ЭБУ_ЭТС 60 и ЭБУ 70 двигателя. Система ТМ2 передачи мощности включает в себя первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первое сцепление CL1, второе сцепление CLr и тормоз BL1.
[0105] Выходной вал двигателя 1 соединен с входным валом 2 системы ТМ2 передачи мощности. Входной вал 2 расположен коаксиально с выходным валом двигателя 1 вдоль протяжения линии выходного вала. Входной вал 2 соединен с первой солнечной шестерней 11 первого планетарного зубчатого механизма 10.
[0106] Первый планетарный зубчатый механизм 10 служит в качестве первого дифференциального механизма, относится к одноступенчатому типу и включает в себя первую солнечную шестерню 11, первые ведущие шестерни 12, первую кольцевую шестерню 13 и первое водило 14. Во втором варианте осуществления изобретения, первая солнечная шестерня 11 соответствует первому вращающемуся элементу, первая кольцевая шестерня 13 соответствует второму вращающемуся элементу, и первое водило 14 соответствует третьему вращающемуся элементу.
[0107] Первое сцепление CL1 представляет собой устройство сцепления, которое способно соединять с возможностью расцепления первую солнечную шестерню 11 и первое водило 14. Тормоз BL1 представляет собой тормозное устройство, которое способно соединять с возможностью расцепления первое водило 14 с неподвижным элементом, с тем чтобы быть способным запретить вращение первого водила 14.
[0108] Второй планетарный зубчатый механизм 20, который служит в качестве второго дифференциального механизма, расположен коаксиально с первым планетарным зубчатым механизмом 10 на стороне двигателя по отношению к первому планетарному зубчатому механизму 10. Второй планетарный зубчатый механизм 20 относится к одноступенчатому типу, и включает в себя вторую солнечную шестерню 21, вторые ведущие шестерни 22, вторую кольцевую шестерню 23 и второе водило 24. Второе водило 24 соединено с первой кольцевой шестерней 13 и вращается как одно целое с первой кольцевой шестерней 13. Во втором варианте осуществления изобретения вторая солнечная шестерня 21 соответствует пятому вращающемуся элементу, вторая кольцевая шестерня 23 соответствует шестому вращающемуся элементу, а второе водило 24 соответствует четвертому вращающемуся элементу.
[0109] Вал 33 ротора первой вращающейся электрической машины MG1 соединен со второй солнечной шестерней 21. Вал 33 ротора первой вращающейся электрической машины MG1 расположен коаксиально с входным валом 2, и вращается как одно целое со второй солнечной шестерней 21. Ведущая шестерня 25 контрпривода соединена со второй кольцевой шестерней 23. Ведущая шестерня 25 контрпривода представляет собой выходную шестерню, которая вращается как одно целое со второй кольцевой шестерней 23. Вторая кольцевая шестерня 23 представляет собой выходной элемент, который способен выдавать вращение, сообщаемое первой вращающейся электрической машиной MG1 или первым планетарным зубчатым механизмом 10 на ведущие колеса W и вторую вращающуюся электрическую машину MG2.
[0110] Второе сцепление CLr представляет собой устройство сцепления, которое способно соединять с возможностью расцепления первое водило 14 первого планетарного зубчатого механизма 10 со второй кольцевой шестерней 23 второго планетарного зубчатого механизма 20.
[0111] Ведущая шестерня 25 контрпривода находится в зацеплении с ведомой шестерней 26 контрпривода. Конфигурация между ведущей шестерней 25 контрпривода и каждым ведущим колесом W, и второй вращающейся электрической машиной MG2 такая же, что и конфигурация, описанная в первом варианте осуществления изобретения.
[0112] Транспортное средство 200 способно селективно осуществлять режим привода ГТС или режим привода ЭТС. Статусы первого сцепления CL1, тормоза BL1 и второго сцепления CLr в каждом режиме привода показаны на диаграмме работы сцепления на фиг. 9.
[0113] На фиг. 10 представлена номограмма, относящаяся к режиму ЭТС с одним электрическим двигателем. В режиме ЭТС с одним электрическим двигателем, первое сцепление CL1, тормоз BL1 и второе сцепление CLr расцеплены. Блок ЭБУ_ГТС 50 заставляет транспортное средство 200 генерировать движущую силу в направлении движения вперед, заставляя через ЭБУ_ЭТС 60 вторую вращающуюся электрическую машину MG2 выдавать положительный крутящий момент.
[0114] На фиг. 10В представлена номограмма, относящаяся к режиму ЭТС с двумя электрическими двигателями. В режиме ЭТС с двумя электрическими двигателями, блок ЭБУ_ГТС 50 включает первое сцепление CL1 и тормоз BL1 (второе сцепление CLr расцеплено). Поскольку первое сцепление CL1 и тормоз BL1 включены, вращение всех вращающихся элементов первого планетарного зубчатого механизма 10 останавливается. Блок ЭБУ_ГТС 50 заставляет каждую из машин - первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 выдавать крутящий момент, чтобы придать движение транспортному средству 200.
[0115] Режим привода ГТС согласно второму варианту осуществления изобретения включает в себя первый режим ГТС (режим повышающей передачи (ПОВ/П) на первичном валу), второй режим ГТС (режим понижающей передачи (ПОН/П) на первичном валу) и третий режим ГТС (режим фиксированной передачи).
[0116] Сначала будет описан первый режим ГТС. В первом режиме ГТС второе сцепление CLr расцеплено (установлено в незацепленное состояние). Фиг. 10С представляет собой номограмму в период, когда транспортное средство движется вперед в режиме привода ГТС в первом режиме ГТС. Фиг. 10D представляет собой номограмму в период, когда транспортное средство 200 движется назад в режиме привода ГТ в первом режиме ГТС.
[0117] В первом режиме ГТС в то время, когда транспортное средство 200 движется вперед, блок ЭБУ_ГТС 50 включает первое сцепление CL1, и выключает тормоз BL1. Поскольку первое сцепление CL1 сцеплено, относительное движение первого планетарного зубчатого механизма 10 запрещено. Во втором варианте осуществления изобретения, первая кольцевая шестерня 13 первого планетарного зубчатого механизма 10 соединена со вторым водилом 24 второго планетарного зубчатого механизма 20, при этом вращение двигателя 1 увеличивается по скорости во втором планетарном зубчатом механизме 20, и выдается от второй кольцевой шестерни 23. То есть устанавливается состояние повышенной передачи (ПОВ/П).
[0118] В первом режиме ГТС в то время, когда транспортное средство 200 движется назад, блок ЭБУ_ГТС 50 выключает первое сцепление CL1 и включает тормоз BL1. Поскольку тормоз BL1 находится в состоянии зацепления, вращение первого водила 14 запрещено. Мощность двигателя 1 передается от первой кольцевой шестерни 13 на второе водило 24. Обратное вращение (вращение для заднего хода) (двигателя 1), сообщенное второму водилу 24, увеличивается по скорости (переключается по скорости по направлению к стороне заднего хода) во втором планетарном зубчатом механизме 20 и выдается от второй кольцевой шестерни 23. То есть устанавливается состояние повышенной передачи (ПОВ/П). Таким образом, в первом режиме ГТС согласно второму варианту осуществления изобретения вращение уже являлось вращением для заднего хода, когда вращение выдается первым планетарным зубчатым механизмом 10, поэтому первый режим ГТС пригоден для заднего хода.
[0119] Далее будет описан второй режим ГТС. На фиг. 10Е представлена номограмма, относящаяся ко второму режиму ГТС. Во втором режиме ГТС блок ЭБУ_ГТС 50 выключает и первое сцепление CL1 и тормоз BL1 и включает второе сцепление CLr. Поскольку второе сцепление CLr находится в состоянии сцеплено, первое водило 14 соединено со второй кольцевой шестерней 23 в дополнение к соединению первой кольцевой шестерни 13 со вторым водилом 24 между первым планетарным зубчатым механизмом 10 и вторым планетарным зубчатым механизмом 20. Таким образом, имеется одна линия на номограмме на фиг. 10Е. То есть можно распределять мощность от двигателя 1 между второй солнечной шестерней 21 и второй кольцевой шестерней 23 во втором режиме ГТС при передаточном числе (коэффициенте распределения мощности), отличном от такового в первом режиме ГТС. Во втором режиме ГТС вращение двигателя 1 уменьшается по скорости и выдается от второй кольцевой шестерни 23. То есть устанавливается состояние пониженной передачи (ПОН/П). Движение задним ходом возможно путем вращения вращающейся электрической машины в обратном направлении.
[0120] Далее будет описан третий режим ГТС. Фиг. 10F представляет собой номограмму, относящуюся к режиму фиксированной передачи с прямым соединением. Фиг. 10G представляет собой номограмму, относящуюся к режиму фиксированной передачи на выходном валу. В режиме фиксированной передачи с прямым соединением, блок ЭБУ_ГТС 50 включает и первое сцепление CL1 и второе сцепление CLr и выключает тормоз BL1. Поскольку первое и второе сцепления CL1, CLr включены, относительное движение и первого планетарного зубчатого механизма 10, и второго планетарного зубчатого механизма 20 запрещено. Таким образом, можно выдавать мощность двигателя 1 непосредственно со второй кольцевой шестерни 23.
[0121] В режиме фиксированной передачи на выходном валу блок ЭБУ_ГТС 50 выключает первое сцепление CL1 и включает и тормоз BL1 и второе сцепление CLr. Поскольку тормоз BL1 включен, вращение первого водила 14 запрещено. Поскольку второе сцепление CLr находится в состоянии сцеплено, первое водило 14 соединено со второй кольцевой шестерней 23 в дополнение к соединению первой кольцевой шестерни 13 со вторым водилом 24 между первым планетарным зубчатым механизмом 10 и вторым планетарным зубчатым механизм 20. Поэтому вращение второй кольцевой шестерни 23 запрещено, при этом можно выполнять зарядку только от первой вращающейся электрической машине MG1 путем использования мощности от двигателя 1. Поэтому режим фиксированной передачи на выходном валу может быть отнесен к режиму зарядки. Также можно запускать двигатель 1 без какого-либо воздействия на вторую кольцевую шестерню 23, который представляет собой выходной элемент.
[0122] Как описано выше, можно изменять коэффициент распределения мощности в системе ТМ2 передачи мощности между первым режимом ГТС и вторым режимом ГТС. В первом режиме ГТС второе сцепление CLr не зацеплено, а первое сцепление CL1 или тормоз BL1 зацеплены. Во втором режиме ГТС второе сцепление CLr зацеплено, а первое сцепление CL1 и тормоз BL1 не зацеплены. Во втором варианте осуществления изобретения, первый режим ГТС предпочтительно выбирается при работе при низкой нагрузке или высокой скорости, а второй режим ГТС предпочтительно выбирается при работе при высокой нагрузке. При такой конфигурации возрастание крутящего момента или скорости вращения первой вращающейся электрической машины MG1 уменьшается.
[0123] Третий вариант осуществления изобретения будет описан со ссылкой на фиг. 11-13G. Третий вариант осуществления относится к системе ТМ3 передачи мощности для передачи мощности от двигателя 1, и применяется на транспортном средстве 300, как и в случае с вышеописанными вариантами осуществления. В нижеследующем описании одинаковые ссылочные позиции обозначают компоненты, имеющие функции аналогичные тем компонентам, что уже описаны в вышеприведенных вариантах осуществления изобретения, и их описание опускается. Кроме того, описание пунктов, которые очевидны специалистам в данной области техники, путем обращения к описанию вышеприведенных вариантов осуществления изобретения, опускается или упрощается, и будут в основном описаны характерная конфигурация и функции третьего варианта осуществления. Модификации и изменения, описанные в вышеприведенных вариантах осуществления, также аналогичным образом применяются к третьему варианту осуществления изобретения, если только нет несоответствия.
[0124] Как показано на фиг. 11, транспортное средство 300 согласно третьему варианту осуществления представляет собой гибридное транспортное средство (ГТ), включающее в себя двигатель 1, первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2. Транспортное средство 300 включает в себя двигатель 1, первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, сцепление (первое сцепление) CL1, сцепление (второе сцепление) CLr, тормоз BL1, дифференциал 30, блоки ЭБУ_ГТС 50, ЭБУ_ЭТС 60 и ЭБУ 70 двигателя. Система ТМ3 передачи мощности включает в себя первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первое сцепление CL1, второе сцепление CLr и тормоз BL1.
[0125] Выходной вал двигателя 1 соединен с входным валом 2 системы ТМ3 передачи мощности. Входной вал 2 расположен коаксиально с выходным валом двигателя 1 вдоль протяжения линии выходного вала. Входной вал 2 соединен с первой солнечной шестерней 11 первого планетарного зубчатого механизма 10.
[0126] Первый планетарный зубчатый механизм 10, который служит в качестве первого дифференциального механизма, относится к одноступенчатому типу и включает в себя первую солнечную шестерню 11, первые ведущие шестерни 12, первую кольцевую шестерню 13 и первое водило 14. В третьем варианте осуществления изобретения первая солнечная шестерня 11 соответствует первому вращающемуся элементу, первая кольцевая шестерня 13 соответствует второму вращающемуся элементу, и первое водило 14 соответствует третьему вращающемуся элементу.
[0127] Первое сцепление CL1 представляет собой устройство сцепления, которое способно соединять с возможностью расцепления первую солнечную шестерню 11 и первое водило 14. Тормоз BL1 представляет собой тормозное устройство, которое способно соединять с возможностью расцепления первое водило 14 с неподвижным элементом, с тем чтобы быть способным запретить вращение первого водила 14.
[0128] Второй планетарный зубчатый механизм 20, который служит в качестве второго дифференциального механизма, расположен коаксиально с первым планетарным зубчатым механизмом 10 на стороне двигателя по отношению к первому планетарному зубчатому механизму 10. Второй планетарный зубчатый механизм 20 относится к одноступенчатому типу, и включает в себя вторую солнечную шестерню 21, вторые ведущие шестерни 22, вторую кольцевую шестерню 23 и второе водило 24. Вторая кольцевая шестерня 23 соединена с первой кольцевой шестерней 13 и вращается как одно целое с первой кольцевой шестерней 13. В третьем варианте осуществления вторая солнечная шестерня 21 соответствует пятому вращающемуся элементу, вторая кольцевая шестерня 23 соответствует четвертому вращающемуся элементу, и второе водило 24 соответствует шестому вращающемуся элементу.
[0129] Вал 33 ротора первой вращающейся электрической машины MG1 соединен со второй солнечной шестерней 21. Вал 33 ротора первой вращающейся электрической машины MG1 расположен коаксиально с входным валом 2 и вращается как одно целое со второй солнечной шестерней 21. Ведущая шестерня 25 контрпривода соединена со вторым водилом 24. Ведущая шестерня 25 контрпривода представляет собой выходную шестерню, которая вращается как одно целое со вторым водилом 24. Второе водило 24 представляет собой выходной элемент, который способен выдавать вращение, сообщаемое от первой вращающейся электрической машины MG1 или первого планетарного зубчатого механизма 10 на ведущие колеса W и вторую вращающуюся электрическую машину MG2.
[0130] Второе сцепление CLr представляет собой устройство сцепления, которое способно соединять с возможностью расцепления первое водило 14 первого планетарного зубчатого механизма 10 со вторым водилом 24 второго планетарного зубчатого механизма 20.
[0131] Ведущая шестерня 25 контрпривода находится в зацеплении с ведомой шестерней 26 контрпривода. Конфигурация между ведущей шестерней 25 контрпривода и каждым ведущим колесом W и второй вращающейся электрической машиной MG2 такая же, что и конфигурация, описанная в первом варианте осуществления изобретения.
[0132] Транспортное средство 300 способно селективно выполнять режим привода ГТС или режим привода ЭТС. Статусы первого сцепления CL1, тормоза BL1 и второго сцепления CLr в каждом режиме привода показаны на диаграмме работы сцепления на фиг. 12.
[0133] На фиг. 13А представлена номограмма, относящаяся к режиму ЭТС с одним электрическим двигателем. В режиме ЭТС с одним электрическим двигателем первое сцепление CL1, тормоз BL1 и второе сцепление CLr расцеплены. Блок ЭБУ_ЭТС 60 заставляет транспортное средство 300 генерировать движущую силу в направлении движения вперед, заставляя через ЭБУ_ЭТС 60 вторую вращающуюся электрическую машину MG2 выдавать положительный крутящий момент.
[0134] На фиг. 13В представлена номограмма, относящаяся к режиму ЭТС с двумя электрическими двигателями. В режиме ЭТС с двумя электрическими двигателями блок ЭБУ_ГТС 50 включает первое сцепление CL1 и тормоз BL1 (второе сцепление CLr расцеплено). Поскольку первое сцепление CL1 и тормоз BL1 включены, вращение всех вращающихся элементов первого планетарного зубчатого механизма 10 останавливается. Блок ЭБУ_ГТС 50 заставляет каждую из машин - первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 выдавать крутящий момент, чтобы придать движение транспортному средству 300.
[0135] Режим привода ГТС согласно третьему варианту осуществления изобретения включает в себя первый режим ГТС (режим понижающей передачи (ПОН/П) на первичном валу), второй режим ГТС (режим повышающей передачи (ПОВ/П) на первичном валу) и третий режим ГТС (режим фиксированной передачи).
[0136] Сначала будет описан первый режим ГТС. В первом режиме ГТС второе сцепление CLr расцеплено (установлено в незацепленное состояние). На фиг. 13С представлена номограмма в период, когда транспортное средство 300 движется вперед в режиме привода ГТС в первом режиме ГТС. На фиг. 13D представлена номограмма в период, когда транспортное средство 300 движется назад в режиме привода ГТС в первом режиме ГТС.
[0137] В первом режиме ГТС в то время, когда транспортное средство 300 движется вперед, блок ЭБУ_ГТС 50 включает первое сцепление CL1 и выключает тормоз BL1. Поскольку первое сцепление CL1 находится в состоянии сцеплено, относительное движение первого планетарного зубчатого механизма 10 запрещено. В третьем варианте осуществления изобретения, первая кольцевая шестерня 13 первого планетарного зубчатого механизма 10 соединена со второй кольцевой шестерней 23 второго планетарного зубчатого механизма 20, при этом вращение двигателя 1 уменьшается по скорости во втором планетарном зубчатом механизме 20 и выдается вторым водилом 24. То есть устанавливается состояние пониженной передачи (ПОН/П).
[0138] В первом режиме ГТС в период, когда транспортное средство 300 движется назад, блок ЭБУ_ГТС 50 выключает первое сцепление CL1 и включает тормоз BL1. Поскольку тормоз BL1 находится в состоянии сцеплено, вращение первого водила 14 запрещено. Мощность двигателя 1 передается от первой кольцевой шестерни 13 на вторую кольцевую шестерню 23. Обратное вращение (вращение для заднего хода) (двигателя 1), переданное на вторую кольцевую шестерню 23, уменьшается по скорости (переключается по скорости к стороне движения передним ходом) во втором планетарном зубчатом механизме 20 и выдается вторым водилом 24. То есть устанавливается состояние пониженной передачи (ПОН/П). Таким образом, в третьем варианте осуществления вращение уже являлось вращением для заднего хода, когда вращение выдавалось первым планетарным зубчатым механизмом 10. Поэтому первый режим ГТС согласно третьему варианту осуществления пригоден для заднего хода.
[0139] Далее будет описан второй режим ГТС. На фиг. 13Е представлена номограмма, относящаяся ко второму режиму ГТС. Во втором режиме ГТС блок ЭБУ_ГТС 50 выключает и первое сцепление CL1 и тормоз BL1 и включает второе сцепление CLr. Поскольку второе сцепление CLr находится в состоянии сцеплено, первое водило 14 соединено со вторым водилом 24 в дополнение к соединению первой кольцевой шестерни 13 со второй кольцевой шестерней 23 между первым планетарным зубчатым механизмом 10 и вторым планетарным зубчатым механизмом 20. Таким образом, имеется одна линия на номограмме на фиг. 13Е. То есть можно распределять мощность от двигателя 1 между второй солнечной шестерней 21 и вторым водилом 24 во втором режиме ГТС при коэффициенте распределения мощности (передаточном числе), отличном от такового при первом режиме ГТС. Во втором режиме ГТС, вращение двигателя 1 увеличивается по скорости и выдается вторым водилом 24. То есть устанавливается состояние повышенной передачи (ПОВ/П). Движение задним ходом обеспечивается путем вращения вращающейся электрической машины в обратном направлении.
[0140] Далее будет описан третий режим ГТС. На фиг. 13F представлена номограмма, относящаяся к режиму фиксированной передачи с прямым соединением. На фиг. 13G представлена номограмма, относящаяся к режиму фиксированной передачи на выходном валу. В режиме фиксированной передачи с прямым соединением блок ЭБУ_ГТС 50 включает и первое сцепление CL1 и второе сцепление CLr и выключает тормоз BL1. Поскольку первое и второе сцепления CL1, CLr включены, относительное движение и первого планетарного зубчатого механизма 10 и второго планетарного зубчатого механизма 20 запрещены. Таким образом, можно выдавать мощность двигателя 1 непосредственно вторым водилом 24.
[0141] В режиме фиксированной передачи на выходном валу блок ЭБУ_ГТС 50 выключает первое сцепление CL1 и включает и тормоз BL1 и второе сцепление CLr. Поскольку тормоз BL1 находится в состоянии сцеплено, вращение первого водила 14 запрещено. Поскольку второе сцепление CLr сцеплено, первое водило 14 соединяется со вторым водилом 24 в дополнение к соединению первой кольцевой шестерни 13 со второй кольцевой шестерней 23 между первым планетарным зубчатым механизмом 10 и вторым планетарным зубчатым механизмом 20. Поэтому вращение второго водила 24 запрещено, при этом можно выполнять зарядку от первой вращающейся электрической машины MG1 путем использования мощности от двигателя 1. Поэтому режим фиксированной передачи на выходном валу может именоваться режимом зарядки.
[0142] Как описано выше, можно изменять коэффициент распределения мощности в системе ТМ3 передачи мощности между первым режимом ГТС и вторым режимом ГТС. В первом режиме ГТС, второе сцепление CLr не зацеплено, а первое сцепление CL1 или тормоз BL1 сцеплены. Во втором режиме ГТ второе сцепление CLr сцеплено, а первое сцепление CL1 и тормоз BL1 находятся в состоянии сцеплено расцеплено. В третьем варианте осуществления первый режим ГТС предпочтительно выбирается при работе при высокой нагрузке, а второй режим ГТС предпочтительно выбирается при работе при низкой нагрузке или высокой скорости. При такой конфигурации, возрастание крутящего момента или скорости вращения первой вращающейся электрической машины MG1 уменьшается.
[0143] Четвертый вариант осуществления изобретения будет описан со ссылкой на фиг. 14-16Н. Четвертый вариант осуществления относится к системе ТМ4 передачи мощности для передачи мощности от двигателя 1 и применяется на транспортном средстве 400, как и в случае вышеописанных вариантов осуществления изобретения. В нижеследующем описании одинаковые ссылочные позиции обозначают компоненты, имеющие функции, аналогичные тем компонентам, что уже описаны в вышеприведенных вариантах осуществления, и их описание опускается. Далее описание пунктов, которые очевидны специалистам в данной области техники, путем обращения к описанию вышеприведенных вариантов осуществления, опускается или упрощается, и будут в основном описаны характерная конфигурация и функции четвертого варианта осуществления. Модификации и изменения, описанные в вышеприведенных вариантах осуществления, также аналогичным образом применяется к четвертому варианту осуществления, если только нет несоответствия.
[0144] Как показано на фиг. 14, транспортное средство 400 согласно четвертому варианту осуществления представляет собой гибридное транспортное средство (ГТС), включающее в себя двигатель 1, первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2. Транспортное средство 400 включает в себя двигатель 1, первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, третий планетарный зубчатый механизм 40, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, сцепление (первое сцепление) CL1, сцепление (второе сцепление) CLr, тормоз BL1, дифференциал 30, блоки ЭБУ_ГТС 50, ЭБУ_ЭТС 60 и ЭБУ 70 двигателя. Система ТМ4 передачи мощности включает в себя первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первое сцепление CL1, второе сцепление CLr и тормоз BL1.
[0145] Выходной вал двигателя 1 соединен с входным валом 2 системы ТМ4 передачи мощности. Входной вал 2 расположен коаксиально с выходным валом двигателя 1 вдоль протяжения линии выходного вала. Входной вал 2 соединен с первым водилом 14 первого планетарного зубчатого механизма 10.
[0146] Первый планетарный зубчатый механизм 10, который служит в качестве первого дифференциального механизма, относится к одноступенчатому типу и включает в себя первую солнечную шестерню 11, первые ведущие шестерни 12, первую кольцевую шестерню 13 и первое водило 14. В третьем варианте осуществления изобретения первая солнечная шестерня 11 соответствует второму вращающемуся элементу, первая кольцевая шестерня 13 соответствует третьему вращающемуся элементу, и первое водило 14 соответствует первому вращающемуся элементу.
[0147] Первое сцепление CL1 представляет собой устройство сцепления, которое способно соединять с возможностью расцепления первую кольцевую шестерню 13 с первым водилом 14. Тормоз BL1 представляет собой тормозное устройство, которое способно соединять с возможностью расцепления первую кольцевую шестерню 13 с неподвижным элементом, с тем чтобы быть способным запретить вращение первой кольцевой шестерни 13.
[0148] Второй планетарный зубчатый механизм 20, который служит в качестве второго дифференциального механизма, расположен коаксиально с первым планетарным зубчатым механизмом 10 на стороне двигателя по отношению к первому планетарному зубчатому механизму 10. Второй планетарный зубчатый механизм 20 относится к одноступенчатому типу и включает в себя вторую солнечную шестерню 21, вторые ведущие шестерни 22, вторую кольцевую шестерню 23 и второе водило 24. Вторая солнечная шестерня 21 соединена с первой солнечной шестерней 11 и вращается как одно целое с первой солнечной шестерней 11. В четвертом варианте осуществления изобретения вторая солнечная шестерня 21 соответствует четвертому вращающемуся элементу, вторая кольцевая шестерня 23 соответствует пятому вращающемуся элементу, и второе водило 24 соответствует шестому вращающемуся элементу.
[0149] Вал 33 ротора первой вращающейся электрической машины MG1 соединен со второй кольцевой шестерней 23. Вал 33 ротора первой вращающейся электрической машины MG1 расположен коаксиально с входным валом 2 и вращается как одно целое со второй кольцевой шестерней 23. Второе сцепление CLr представляет собой устройство сцепления, которое способно соединять с возможностью расцепления первое водило 14 первого планетарного зубчатого механизма 10 с второй кольцевой шестерней 23 второго планетарного зубчатого механизма 20, и способно соединять первую кольцевую шестерню 13 со второй кольцевой шестерней 23 через первую вращающуюся электрическую машину MG1, в частности, через вал 33 ротора первой вращающейся электрической машины MG1. Второе водило 24 представляет собой выходной элемент, который способен выдавать вращение, сообщаемое от первой вращающейся электрической машины MG1 или первого планетарного зубчатого механизма 10, на ведущие колеса W и вторую вращающуюся электрическую машину MG2.
[0150] Вал 24 соединен со вторым водилом 24. Третий планетарный зубчатый механизм 40 расположен в середине вала 24А. Третий планетарный зубчатый механизм 40 расположен коаксиально и с первым и со вторым планетарным зубчатым механизмом 10, 20, и расположен с противоположной стороны от двигателя 1 относительно второго планетарного зубчатого механизма 20. Третий планетарный зубчатый механизм 40 относится к одноступенчатому типу и включает в себя третью солнечную шестерню 41, третьи ведущие шестерни 42, третью кольцевую шестерню 43 и третье водило 44. Третье водило 44 соединено с валом 24А и вращается как одно целое со вторым водилом 24.
[0151] Вал 45 ротора второй вращающейся электрической машины MG2 соединен с третьей солнечной шестерней 41. Вал 45 ротора второй вращающейся электрической машины MG2 расположен коаксиально с входным валом 2 и вращается как одно целое с третьей солнечной шестерней 41. Третий планетарный зубчатый механизм 40 служит для усиления выходного крутящего момента второй вращающейся электрической машины MG2.
[0152] Второе водило 24 соединено с ведущей шестерней 28 привода через вал 24А. Ведущая шестерня 28 привода находится в зацеплении с дифференциальной кольцевой шестерней 29 дифференциала 30. Дифференциал 30 соединен с ведущими колесами W через правую и левую оси 31.
[0153] Транспортное средство 400 способно селективно выполнять режим привода ГТС или режим привода ЭТС. Статусы первого сцепления CL1, тормоза BL1 и второго сцепления CLr в каждом режиме привода показаны на диаграмме работы сцепления на фиг. 15.
[0154] На фиг. 16А представлена номограмма, относящаяся к режиму ЭТС с одним электрическим двигателем. В режиме ЭТС с одним электрическим двигателем, первое сцепление CL1, тормоз BL1 и второе сцепление CLr расцеплены. Блок ЭБУ_ГТС 50 заставляет транспортное средство 400 генерировать движущую силу в направлении движения вперед, заставляя через блок ЭБУ_ЭТС 60 вторую вращающуюся электрическую машину MG2 выдавать положительный крутящий момент.
[0155] На фиг. 16В представлена номограмма, относящаяся к режиму ЭТС с двумя электрическими двигателями. В режиме ЭТС с двумя электрическими двигателями, блок ЭБУ_ГТС 50 включает первое сцепление CL1 и тормоз BL1 (второе сцепление CLr расцеплено). Поскольку первое сцепление CL1 и тормоз BL1 включены, вращение всех вращающихся элементов первого планетарного зубчатого механизма 10 останавливается. Блок ЭБУ_ГТС 50 заставляет каждую из машин - первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 - выдавать крутящий момент, чтобы придать движение транспортному средству 400.
[0156] Режим привода ГТС согласно четвертому варианту осуществления изобретения включает в себя первый режим ГТС (режим понижающей передачи (ПОН/П) на первичном валу), второй режим ГТС (режим повышающей передачи (ПОВ/П) на первичном валу) и третий режим ГТС (режим фиксированной передачи).
[0157] Сначала будет описан первый режим ГТС. В режиме привода ГТС в первом режиме ГТС, второй планетарный зубчатый механизм 20, по существу, находится в состоянии дифференциальной передачи (главной передачи), и первый планетарный зубчатый механизм 10, который служит в качестве трансмиссионного блока, переключается между низкой передачей (Lo) и высокой передачей (Hi). НА фиг. 16С представлена номограмма, относящаяся к режиму привода на низкой передаче (первый режим ПОН/П Lo) в режиме привода ГТС в первом режиме ГТС. На фиг. 16D представлена номограмма, относящаяся к режиму привода на высокой передаче (первый режим ПОН/П Hi) в режиме привода ГТС в первом режиме ГТС. В первом режиме ГТС, второе сцепление CLr расцеплено (установлено в незацепленное состояние).
[0158] В первом режиме ПОН/П Lo блок ЭБУ_ГТС 50 включает первое сцепление CL1 и выключает тормоз BL1. Поскольку первое сцепление CL1 сцеплено, относительное движение первого планетарного зубчатого механизма 10 запрещено. В четвертом варианте осуществления изобретения, первая солнечная шестерня 11 первого планетарного зубчатого механизма 10 соединена со второй солнечной шестерней 21 второго планетарного зубчатого механизма 20, при этом вращение двигателя 1 уменьшается по скорости во втором планетарном зубчатом механизме 20 и выдается вторым водилом 24. То есть устанавливается состояние пониженной передачи (ПОН/П).
[0159] В первом режиме ПОН/П Hi блок ЭБУ_ГТС 50 выключает первое сцепление CL1 и включает тормоз BL1. Поскольку тормоз BL1 сцеплен, вращение первой кольцевой шестерни 13 запрещено. Мощность двигателя 1 передается от первой солнечной шестерни 11 на вторую солнечную шестерню 21. Вращение (двигателя 1), переданное второй солнечной шестерне 21, уменьшается по скорости во втором планетарном зубчатом механизме 20 и выдается вторым водилом 24. То есть устанавливается состояние пониженной передачи (ПОН/П).
[0160] Далее будет описан второй режим ГТС. На фиг. 16Е представлена номограмма в период, когда транспортное средство 400 движется вперед во втором режиме ГТС На фиг. 16F представлена номограмма в период, когда транспортное средство 400 движется назад во втором режиме ГТС.
[0161] Во втором режиме ГТС блок ЭБУ_ГТС 50 выключает и первое сцепление CL1 и тормоз BL1 и включает второе сцепление CLr. Когда второе сцепление CLr сцеплено, первая кольцевая шестерня 13 соединяется со второй кольцевой шестерней 23, переводимой в соединенное состояние в дополнение к соединению первой солнечной шестерни 11 со второй солнечной шестерней 21 между первым планетарным зубчатым механизмом 10 и вторым планетарным зубчатым механизмом 20. Таким образом, имеется одна линия на номограммах на фиг. 16Е и фиг. 16F. То есть можно распределять мощность от двигателя 1 между первой кольцевой шестерней 13 и вторым водилом 24 во втором режиме ГТ при коэффициенте распределения мощности (передаточном числе), отличном от такового в первом режиме ГТС (первом режиме ПОН/П Lo и первом режиме ПОН/П Hi). Во втором режиме ГТС вращение двигателя 1 увеличивается по скорости, и выдается вторым водилом 24. То есть устанавливается состояние повышенной передачи (ПОВ/П). Когда транспортное средство 400 движется назад, скорость вращения двигателя 1 может увеличиться на стороне движения задним ходом путем вращения второй вращающейся электрической машины MG2 в обратном направлении.
[0162] Далее будет описан третий режим ГТС. На фиг. 16G представлена номограмма, относящаяся к режиму фиксированной передачи с прямым соединением. На Фиг. 16Н представлена номограмма, относящаяся к режиму фиксированной передачи на повышенной передаче (ПОВ/П). В режиме фиксированной передачи с прямым соединением блок ЭБУ_ГТС 50 включает и первое сцепление CL1 и второе сцепление CLr и выключает тормоз BL1. Поскольку первое и второе сцепления CL1, CLr находятся в состоянии сцеплено, относительное движение и первого планетарного зубчатого механизма 10, а также второго планетарного зубчатого механизма 20 запрещены. Таким образом, можно выдавать мощность двигателя 1 непосредственно со второго водила 24.
[0163] В режиме фиксированной передачи на повышенной передаче (ПОВ/П) блок ЭБУ_ГТС 50 выключает первое сцепление CL1 и включает и тормоз BL1 и второе сцепление CLr. Поскольку тормоз BL1 находятся в состоянии сцеплено, вращение первой кольцевой шестерни 13 запрещено. Когда второе сцепление CLr находится в состоянии сцеплено, первая кольцевая шестерня 13 соединяется со второй кольцевой шестерней 23, переводимой в соединенное состояние в дополнение к соединению первой солнечной шестерни 11 со второй солнечной шестерней 21 между первым планетарным зубчатым механизмом 10 и вторым планетарным зубчатым механизмом 20. Поэтому вращение второй кольцевой шестерни 23 запрещено, и вращение двигателя 1 увеличивается по скорости и выдается вторым водилом 24. То есть устанавливается состояние повышенной передачи (ПОВ/П). Как можно понять из фиг. 15 и фиг. 16Н, режим фиксированной передачи на повышенной передаче (ПОВ/П) эффективен при повышении топливной экономичности во время движения на высокой скорости.
[0164] Как описано выше, можно изменять коэффициент распределения мощности в системе ТМ4 передачи мощности между первым режимом ГТС и вторым режимом ГТС. В первом режиме ГТС второе сцепление CLr не зацеплено, а первое сцепление CL1 или тормоз BL1 находятся в состоянии сцеплено. Во втором режиме ГТС, второе сцепление CLr находится в состоянии сцеплено, а первое сцепление CL1 и тормоз BL1 не сцеплены. В четвертом варианте осуществления изобретения первый режим ГТС предпочтительно выбирается при работе при высокой нагрузке, а второй режим ГТС предпочтительно выбирается при работе при низкой нагрузке или высокой скорости. При такой конфигурации, возрастание крутящего момента или скорости вращения первой вращающейся электрической машины MG1 уменьшается.
[0165] Пятый вариант осуществления изобретения будет описан со ссылкой на фиг. 17. Пятый вариант осуществления относится к системе ТМ5 передачи мощности для передачи мощности от двигателя 1 и применяется на транспортном средстве 500, как и в случае с вышеописанными вариантами осуществления. В нижеследующем описании одинаковые ссылочные позиции обозначают компоненты, имеющие функции, аналогичные тем компонентам, которые уже описаны в вышеприведенных вариантах осуществления, и их описание опускается. Далее описание пунктов, которые очевидны специалистам в данной области техники, путем обращения к описанию вышеприведенных вариантов осуществления изобретения, опускается или упрощается, и будут в основном описаны характерная конфигурация и функции пятого варианта осуществления. Модификации и изменения, описанные в вышеприведенных вариантах осуществления, также аналогичным образом применяется к пятому варианту осуществления, если только нет несоответствий.
[0166] Как показано на фиг. 17, транспортное средство 500 согласно пятому варианту осуществления изобретения представляет собой гибридное транспортное средство (ГТС), включающее в себя двигатель 1, первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2. Транспортное средство 500 включает в себя двигатель 1, первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, сцепление (первое сцепление) CL1, сцепление (второе сцепление) CLr, тормоз BL1, дифференциал 30, блоки ЭБУ_ГТС 50, ЭБУ_ЭТС 60 и ЭБУ 70 двигателя. Система ТМ5 передачи мощности включает в себя первый планетарный зубчатый механизм 10, второй планетарный зубчатый механизм 20, первое сцепление CL1, второе сцепление CLr и тормоз BL1.
[0167] Выходной вал двигателя 1 соединен с входным валом 2 системы ТМ5 передачи мощности. Входной вал 2 расположен коаксиально с выходным валом двигателя 1 вдоль протяжения линии выходного вала. Входной вал 2 соединен с первой кольцевой шестерней 13 первого планетарного зубчатого механизма 10.
[0168] Первый планетарный зубчатый механизм 10, который служит в качестве первого дифференциального механизма, относится к одноступенчатому типу и включает в себя первую солнечную шестерню 11, первые ведущие шестерни 12, первую кольцевую шестерню 13 и первое водило 14. В пятом варианте осуществления изобретения первая солнечная шестерня 11 соответствует второму вращающемуся элементу, первая кольцевая шестерня 13 соответствует первому вращающемуся элементу, и первое водило 14 соответствует третьему вращающемуся элементу.
[0169] Первое сцепление CL1 представляет собой устройство сцепления, которое способно соединять с возможностью расцепления первую кольцевую шестерню 13 с первым водилом 14. Тормоз BL1 представляет собой тормозное устройство, которое способно соединять с возможностью расцепления первое водило 14 с неподвижным элементом, с тем чтобы быть способным запретить вращение первого водила 14.
[0170] Второй планетарный зубчатый механизм 20, который служит в качестве второго дифференциального механизма, расположен коаксиально с первым планетарным зубчатым механизмом 10 на стороне двигателя по отношению к первому планетарному зубчатому механизму 10. Второй планетарный зубчатый механизм 20 одношестеренчатого типа, и включает в себя вторую солнечную шестерню 21, вторые ведущие шестерни 22, вторую кольцевую шестерню 23 и второе водило 24. Вторая солнечная шестерня 21 соединена с первой солнечной шестерней 11 и вращается как одно целое с первой солнечной шестерней 11. В пятом варианте осуществления изобретения вторая солнечная шестерня 21 соответствует четвертому вращающемуся элементу, вторая кольцевая шестерня 23 соответствует пятому вращающемуся элемент, и второе водило 24 соответствует шестому вращающемуся элементу.
[0171] Ротор первой вращающейся электрической машины MG1 соединен со второй кольцевой шестерней 23. Ротор первой вращающейся электрической машины MG1 расположен коаксиально с входным валом 2 и вращается как одно целое со второй кольцевой шестерней 23. Ведущая шестерня 25 контрпривода соединена со вторым водилом 24. Ведущая шестерня 25 контрпривода представляет собой выходную шестерню, которая вращается как одно целое со вторым водилом 24. Второе водило 24 представляет собой выходной элемент, который способен выдавать вращение, сообщаемое от первой вращающейся электрической машины MG1 или первого планетарного зубчатого механизма 10 на ведущие колеса W и вторую вращающуюся электрическую машину MG2.
[0172] Второе сцепление CLr представляет собой устройство сцепления, которое способно соединять с возможностью расцепления первое водило 14 первого планетарного зубчатого механизма 10 со второй кольцевой шестерней 23 второго планетарного зубчатого механизма 20. Второе сцепление CLr способно соединять первое водило 14 со второй кольцевой шестерней 23 через первую вращающуюся электрическую машину MG1.
[0173] Ведущая шестерня 25 контрпривода находится в зацеплении с ведущей шестерней 26 контрпривода. Конфигурация между ведущей шестерней 25 контрпривода и каждым ведущим колесом W, а также второй вращающейся электрической машиной MG2 такая же, что и конфигурация, описанная в первом варианте осуществления изобретения.
[0174] Транспортное средство 500 способно селективно выполнять режим привода ГТС или режим привода ЭТС. Статусы первого сцепления CL1, тормоза BL1 и второго сцепления CLr в каждом режиме привода находятся в соответствии с диаграммой работы зацепления на фиг. 15 согласно четвертому варианту осуществления изобретения. Что касается номограммы в каждом режиме привода, поскольку первый планетарный зубчатый механизм 10 относится к двухступенчатому типу в пятом варианте осуществления, то фиг. 16А - 16Н, на которых первая кольцевая шестерня 13 (то есть «R1») и первое водило 14 («С1») взаимно меняются друг с другом в каждом режиме привода, используются как номограммы согласно пятому варианту осуществления. Таким образом, дополнительное описание каждого режима привода в пятом варианте осуществления опущено.
[0175] Варианты осуществления изобретения не ограничиваются только вышеописанными вариантами осуществления. Например, в каждом из вышеописанных вариантов осуществления, первый вращающийся элемент соединен с возможностью расцепления либо со вторым, либо третьим вращающимися элементами с помощью первого сцепления CL1. Вместо этого первое сцепление CL1 может быть выполнено с возможностью соединять с возможностью расцепления второй вращающийся элемент с третьим вращающимся элементом. Согласно этому варианту осуществления также, можно устанавливать скорости вращения первого, второго и третьего вращающихся элементов на одинаковую скорость вращения, включая первое сцепление CL1.
[0176] Изобретение охватывает вариант осуществления, в котором отсутствует либо первое сцепление CL1, либо тормоз BL1 в каждом из вышеописанных вариантов осуществления. В этом случае также можно изменять коэффициент распределения мощности между первым режимом ГТС и вторым режимом ГТС. То есть первый блок сцепления согласно объекту изобретения точно должен включать в себя, по меньшей мере, либо блок сцепления, который способен соединять с возможностью расцепления два элемента из числа первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента друг с другом, либо блок сцепления, который способен соединять с возможностью расцепления третий вращающийся элемент с неподвижным элементом.
[0177] Изобретение также охватывает модификации вариантов осуществления конструкции в зубчатых передачах, соответственно показанных схематичными видами (фиг. 1, фиг. 8, фиг. 11, фиг. 14, фиг. 17). Число вращающихся элементов в каждом планетарном зубчатом механизме не ограничивается тремя и может быть больше или равно четырем. Двигатель не ограничивается двигателем внутреннего сгорания. Изобретение охватывает все альтернативные варианты осуществления, примеры применения и их эквиваленты, содержащиеся в концепции изобретения, которая определена в прилагаемой формуле изобретения.
[0178] Обычно имеется хорошо известное транспортное средство, включающее в себя второй дифференциал, первый дифференциал и вторую вращающуюся электрическую машину. Второй дифференциал включает в себя четвертый вращающийся элемент, пятый вращающийся элемент, с которым соединена первая вращающаяся электрическая машина, при этом передается мощность, а шестой вращающийся элемент соединен с ведущими колесами. Статус дифференциальной передачи второго дифференциала регулируется в результате управления режимом работы первой вращающейся электрической машины. Первый дифференциал включает в себя первый вращающийся элемент, с которым соединен двигатель, при этом передается мощность, третий вращающийся элемент и второй вращающийся элемент, соединенный с четвертым вращающимся элементом. Вторая вращающаяся электрическая машина соединена с ведущими колесами, при этом передается мощность. Таково, например, транспортное средство, описанное в публикации международной заявки No. 2013/114594. В публикации этой международной заявки No. 2013/114594 описано, что предлагается первый блок сцепления, который соединяет любые два элемента из следующих - первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента, при этом вращающиеся элементы первого дифференциала вращаются как одно целое путем соединения с первым блоком сцепления, вращение двигателя передается на второй дифференциал с постоянной скоростью, и второй дифференциал может работать в качестве бесступенчатой коробки передач (вариатора) электрической машины.
[0179] В этой связи, чтобы образовать вариатор электрической машины, работающий при коэффициенте распределения мощности, отличном от коэффициента распределения мощности во втором дифференциале, потенциально можно дополнительно включить туда второй блок сцепления, который соединяет либо пятый вращающийся элемент, либо шестой вращающийся элемент с третьим вращающимся элементом. Во втором дифференциале и первом дифференциале в дополнение к тому факту, что четвертый вращающийся элемент соединен со вторым вращающимся элементом, либо пятый вращающийся элемент, либо шестой вращающийся элемент соединяется с третьим вращающимся элементом путем расцепления первого блока сцепления и путем соединения второго блока сцепления. В результате, второй дифференциал и первый дифференциал в целом могут служить в качестве вариатора электрической машины при коэффициенте распределения мощности, отличном от коэффициента распределения мощности во втором дифференциале. В транспортном средстве, включающем в себя первый блок сцепления и второй блок сцепления, когда неработающий двигатель запускается, можно увеличить обороты двигателя и запустить двигатель, например, заставляя первую вращающуюся электрическую машину генерировать крутящий момент в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен. При таком запуске двигателя, поскольку крутящий момент, соответствующий отрицательному крутящему моменту двигателя (именуемому также втягивающим крутящим моментом двигателя), возникающему из-за возрастания скорости вращения неработающего двигателя, передается шестому вращающемуся элементу, соединенному с ведущими колесами, в качестве силы противодействия для увеличения оборотов двигателя, тяговый (движущий) крутящий момент (то есть выходной крутящий момент с ведущих колес) уменьшается (то есть падает). Ввиду такого неудобства можно предложить, чтобы уменьшить толчок во время запуска двигателя, заставить вторую вращающуюся электрическую машину выдавать крутящий момент (компенсирующий крутящий момент), который компенсирует падение тягового крутящего момента. Однако во время запуска двигателя с этой конфигурацией, в которой крутящий момент увеличили в состоянии, когда первый блок сцепления находится в состоянии сцеплено, компенсирующий крутящий момент, который генерируется второй вращающейся электрической машиной, возрастает, при этом, при запуске двигателя в состоянии, когда вторая вращающаяся электрическая машина уже выдавала большой крутящий момент, имеется вероятность того, что вторая вращающаяся электрическая машина не может выдать компенсирующий крутящий момент. В результате вторая вращающаяся электрическая машина не может в достаточной степени компенсировать падение приводного крутящего момента, и возникает озабоченность относительно невозможности уменьшить толчок во время запуска двигателя.
[0180] Далее будет описано транспортное средство, которое облегчает возможность компенсировать падение движущего крутящего момента во время запуска двигателя согласно вариантам осуществления изобретения со ссылкой на сопровождающие чертежи.
[0181] На Фиг. 18 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства 510, согласно шестому варианту осуществления изобретения, и которая также иллюстрирует соответствующую часть системы управления для управления этими устройствами. На фиг. 18 транспортное средство 510 представляет собой гибридное транспортное средство, включающее в себя двигатель (ДВИГ) 512, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, систему 514 передачи мощности и ведущие колеса 516. Двигатель (ДВИГ) 512, первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 могут служить в качестве источников движущей силы, чтобы придать движение транспортному средству 510. Система 514 передачи мощности включает в себя первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2.
[0182] Двигатель 512 представляет собой известный двигатель внутреннего сгорания, который сжигает заданное топливо для выдачи мощности и представляет собой, например, бензиновый двигатель, дизельный двигатель, и пр. Крутящий момент Те двигателя 512 управляется в соответствии с рабочим состоянием, например, степенью открытия дросселя или объемом всасываемого воздуха, количеством подаваемого топлива и временем задержки зажигания, которые управляются электронным блоком 580 управления (описанным далее).
[0183] Каждая из машин - первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 представляет собой, так называемый, электрический двигатель-генератор, имеющий функцию электрического двигателя (электромотора), который генерирует приводной крутящий момент, и функцию генератора. Каждая из машин - первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 соединена с аккумуляторным блоком 520 через блок 518 управления мощностью. Блок 518 управления мощностью включает в себя инвертор, сглаживающий конденсатор и пр. Аккумуляторный блок 520 служит в качестве электрического накопительного устройства, которое обменивается электрической энергией с каждой из машин - первой вращающейся электрической машиной MG1 и второй вращающейся электрической машиной MG2. Блок 518 управления мощностью управляется электронным блоком 580 управления (описанным далее), при этом осуществляется управление крутящим моментом Tg машины MG1, который представляет собой выходной крутящий момент (тяговый крутящий момент или регенеративный крутящий момент) первой вращающейся электрической машины MG1, и крутящим моментом Tm машины MG2, который является выходным крутящим моментом (тяговым крутящим моментом или регенеративным крутящим моментом) второй вращающейся электрической машины MG2.
[0184] Система 514 передачи мощности расположена в контуре передачи мощности между двигателем 512 и ведущими колесами 516. Система 514 передачи мощности включает в себя первый блок 524 передачи мощности, второй блок 526 передачи мощности, ведомую шестерню 530, ведомый вал 532, шестерню 534 конечной передачи (которая имеет меньший диаметр, чем ведомая шестерня 530), шестерню 538 дифференциала и пр. внутри корпуса 522. Корпус 522 представляет собой невращающийся элемент, установленный на кузове транспортного средства. Ведомая шестерня 530 находится в зацеплении с ведущей шестерней 528. Ведущая шестерня 528 представляет собой выходной вращающийся элемент первого блока 524 передачи мощности. Ведомая шестерня 530 жестко прикреплена к ведомому валу 532 так, чтобы быть невращающейся относительно его. Шестерня 534 конечной передачи жестко прикреплена к ведомому валу 532 так, чтобы быть невращающейся относительно его. Шестерня 538 дифференциала находится в зацеплении с шестерней 534 конечной передачи через кольцевую шестерню 536 дифференциала. Система 514 передачи мощности включает в себя оси 540, соединенные с шестерней 538 дифференциала, и пр.
[0185] Первый блок 524 передачи мощности расположен коаксиально с входным валом 542, который представляет собой входной вращающийся элемент первого блока 524 передачи мощности, и включает в себя блок 544 второго дифференциала, блок 546 первого дифференциала, и сцепление CR. Блок 544 второго дифференциала включает в себя второй планетарный зубчатый механизм 548 (второй дифференциальный механизм) и первую вращающуюся электрическую машину MG1. Первый дифференциал 546 включает в себя первый планетарный зубчатый механизм 550 (первый дифференциальный механизм), сцепление С1 и тормоз В1.
[0186] Второй планетарный зубчатый механизм 548 представляет собой известный одноступенчатый шестеренчатый планетарный зубчатый механизм. Второй планетарный зубчатый механизм 548 включает в себя первую солнечную шестерню S1, первые ведущие шестерни Р1, первое водило СА1 и первую кольцевую шестерню R1. Первое водило СА1 поддерживает первые ведущие шестерни Р1, при этом каждая первая ведущая шестерня Р1 способна поворачиваться и вращаться. Первая кольцевая шестерня R1 находится в зацеплении с первой солнечной шестерней S1 через первые ведущие шестерни Р1. Второй планетарный зубчатый механизм 548 служит в качестве дифференциального механизма, который осуществляет дифференциальное действие. Первый планетарный зубчатый механизм 550 представляет собой известный одноступенчатый шестеренчатый планетарный зубчатый механизм. Первый планетарный зубчатый механизм 550 включает в себя вторую солнечную шестерню S2, вторые ведущие шестерни Р2, второе водило СА2 и вторую кольцевую шестерню R2. Второе водило СА2 поддерживает вторые ведущие шестерни Р2, при этом каждая вторая ведущая шестерня Р2 способна поворачиваться и вращаться. Вторая кольцевая шестерня R2 находится в зацеплении со второй солнечной шестерней S2 через вторые ведущие шестерни Р2. Первый планетарный зубчатый механизм 550 служит в качестве дифференциального механизма, который выполняет дифференциальное действие.
[0187] Первая кольцевая шестерня R1 представляет собой четвертый вращающийся элемент RE4, который представляет собой входной элемент, соединенный с выходным вращающимся элементом первого дифференциала 546 (то есть второй кольцевой шестерней R2 первого планетарного зубчатого механизма 550), и служит в качестве входного вращающегося элемента второго дифференциала 544. Первая солнечная шестерня S1 соединена как одно целое с ротором вал 552 первой вращающейся электрической машины MG1, и представляет собой пятый вращающийся элемент RE5, который является реактивным элементом, с которым соединена первая вращающаяся электрическая машина MG1 при этом передается мощность. Первое водило СА1 соединено как одно целое с ведущей шестерней 528, и представляет собой шестой вращающийся элемент RE6, который представляет собой выходной элемент, соединенный с ведущими колесами 516. Первое водило СА1 служит в качестве выходного вращающегося элемента второго дифференциала 544.
[0188] Вторая солнечная шестерня S2 представляет собой первый вращающийся элемент RE1, который соединен как одно целое с входным валом 542, и с которым соединен двигатель 512 через входной вал 542, при этом передается мощность. Вторая солнечная шестерня S2 служит в качестве входного вращающегося элемента первого дифференциала 546. Второе водило СА2 представляет собой третий вращающийся элемент RE3, селективно соединяющийся с корпусом 522 через тормоз В1. Вторая кольцевая шестерня R2 представляет собой второй вращающийся элемент RE2, соединенный с входным вращающимся элементом второго дифференциала 544 (то есть первой кольцевой шестерней R1 второго планетарного зубчатого механизма 548). Вторая кольцевая шестерня R2 служит в качестве выходного вращающегося элемента первого дифференциала 546. Вторая солнечная шестерня S2 и второе водило СА2 селективно соединяются друг с другом через сцепление С1. Первое водило СА1 и второе водило СА2 селективно соединяются друг с другом через сцепление CR. Таким образом, сцепление С1 представляет собой первое устройство сцепления, которое селективно соединяет первый вращающийся элемент RE1 с третьим вращающимся элементом RE3. Сцепление CR представляет собой второе устройство сцепления, которое селективно соединяет шестой вращающийся элемент RE6 с третьим вращающимся элементом RE3. Тормоз В1 представляет собой третье устройство сцепления, которое селективно соединяет третий вращающийся элемент RE3 с корпусом 522, то есть представляет собой невращающийся элемент.
[0189] Каждый из узлов - сцепление С1, тормоз В1 и сцепление CR - предпочтительно представляет собой фрикционное устройство сцепления мокрого типа и является многодисковым гидравлическим фрикционным устройством сцепления, рабочий статусе которого управляется гидравлическим приводом. Рабочие статусы (такие как сцепленное состояние и расцепленное состояние) сцепления С1, тормоза В1 и сцепления CR управляются в качестве реакции на гидравлическое давление, соответственно подаваемое из гидравлического контура 554 управления (например, для С1 - гидравлическое давление Pc1, для В1 - гидравлическое давление Pb1 и для CR - гидравлическое давление Pcr) в результате управления гидравлическим контуром 554 управления электронным блоком 580 управления (описанном далее). Гидравлический контур 554 управления расположен в транспортном средстве 510. Транспортное средство 510 включает в себя электрический масляный насос 555 (именуемый также ЭМН 555). В системе 514 передачи мощности, рабочее масло (масло), которое используется для изменения рабочих статусов сцепления С1, тормоза В1 и сцепления CR, смазывает устройства и охлаждает устройства, подается с использованием ЭМН 555. В дополнение к ЭМН 555 может быть дополнительно предусмотрен механический масляный насос.
[0190] Второй планетарный зубчатый механизм 548 способен служить в качестве механизма деления мощности, который делит (что является синонимом «распределяет») мощность двигателя 512, сообщенную первой кольцевой шестерне R1, между первой вращающейся электрической машиной MG1 и первым водилом СА1 в состоянии, когда относительное движение разрешено. Таким образом, транспортное средство 510 способно выполнять привод от двигателя путем использования прямого крутящего момента (именуемого также прямым крутящим моментом двигателя) и крутящего момента Tm машины MG2. Прямой крутящий момент двигателя механически передается на первое водило СА1, заставляя первую вращающуюся электрическую машину MG1 обеспечивать проиводействующую силу против крутящего момента Те двигателя, воздействующего на первую кольцевую шестерню R1. Крутящий момент Tm машины MG2 генерируется второй вращающейся электрической машиной MG2. Вторая вращающаяся электрическая машина MG2 приводится в действие путем использования электрической энергии, генерируемая первой вращающейся электрической машиной MG1 благодаря мощности, распределенной на первую вращающуюся электрическую машину MG1. Таким образом, второй дифференциал 544 служит в качестве известного вариатора электрической машины (бесступенчатая коробка передач (вариатор) электрической машины), который управляет передаточным числом (отношением скоростей) посредством управления через блок 518 управления мощностью электронным блоком 580 управления (описанном далее) для управления рабочим статусом первой вращающейся электрической машины MG1. То есть второй дифференциал 544 представляет собой трансмиссионный механизм для электромашины, в котором статус дифференциала второго планетарного зубчатого механизма 548 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1.
[0191] Первый дифференциал 546 способен установить четыре состояния, то есть состояние прямого соединения, состояние изменения скорости обратного вращения двигателя 512, нейтральное состояние и состояние внутренней блокировки путем изменения рабочих статусов сцепления С1 и тормоза В1. В частности, когда сцепление С1 находится в состоянии сцеплено, то первый дифференциал 546 установлен в состояние прямого соединения, в котором вращающиеся элементы первого планетарного зубчатого механизма 550 вращаются как одно целое. Когда тормоз В1 находится в состоянии сцеплено, первый дифференциал 546 устанавливается в состояние изменения скорости обратного вращения двигателя 512, в котором вторая кольцевая шестерня R2 (выходной вращающийся элемент первого дифференциала 546) вращается в отрицательном направлении под воздействием положительной скорости вращения Ne двигателя. Когда сцепление С1 расцеплено и тормоз В1 расцеплен, первый дифференциал 546 устанавливается в нейтральное состояние, в котором относительное движение первого планетарного зубчатого механизма 550 разрешено. Когда сцепление С1 сцеплено и тормоз В1 сцеплен, первый дифференциал 546 переходит в состояние внутренней блокировки, в котором вращение каждого из вращающихся элементов первого планетарного зубчатого механизма 550 останавливается.
[0192] Первый блок 524 передачи мощности способен образовывать вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности во втором дифференциале 544. То есть в первом блоке 524 передачи мощности, в дополнение к факту, что первая кольцевая шестерня R1 (четвертый вращающийся элемент RE4) соединяется со второй кольцевой шестерней R2 (вторым вращающимся элементом RE2), первое водило СА1 (шестой вращающийся элемент RE6) соединяется со вторым водилом СА2 (третьим вращающимся элементом RE3) путем зацепления сцепления CR. В результате второй дифференциал 544 и первый дифференциал 546 образуют дифференциальный механизм, второй дифференциал 544 и первый дифференциал 546 в целом могут служить в качестве вариатора электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности только второго дифференциала 544.
[0193] В первом блоке 524 передачи мощности первый дифференциал 546 и второй дифференциал 544, посредством которых устанавливаются четыре состояния, соединены друг с другом, и транспортное средство 510 способно достичь множества режимов привода (описанных далее) синхронно с изменением рабочего статуса сцепления CR.
[0194] В этой конфигурации первого блока 524 передачи мощности мощность двигателя 512 и мощность первой вращающейся электрической машины MG1 передаются от ведущей шестерни 528 на ведомую шестерню 530. Поэтому двигатель 512 и первая вращающаяся электрическая машина MG1 соединяются с ведущими колесами 516 через первый блок 524 передачи мощности так, что при этом передается мощность.
[0195] Второй блок 526 передачи мощности включает в себя вторую вращающуюся электрическую машину MG2, вал 556 ротора второй вращающейся электрической машины MG2 и редуктор 558 (редуктор 558, имеющий меньший диаметр, чем ведомая шестерня 530). Вал 556 ротора расположен параллельно входному валу 542 и является иным валом, чем входной вал 542. Таким образом, во втором блоке 526 передачи мощности мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530 без прохождения через первый блок 524 передачи мощности. Поэтому вторая вращающаяся электрическая машина MG2 соединена с ведущими колесами 516, так что мощность передается без прохождения через первый блок 524 передачи мощности. То есть вторая вращающаяся электрическая машина MG2 представляет собой вращающуюся электрическую машину, соединенную с осями 540, которые являются выходными вращающимися элементами системы 514 передачи мощности, при этом передается мощность без прохождения через первый блок 524 передачи мощности. Что касается выходных вращающихся элементов системы 514 передачи мощности, отличных от осей 540, то шестерня 534 конечной передачи или дифференциальная кольцевая шестерня 536 также равнозначны вращающемуся элементу системы 514 передачи мощности.
[0196] Выполненная таким образом система 514 передачи мощности предпочтительно используется для переднеприводного (ПП) транспортного средства с передним расположением двигателя. В системе 514 передачи мощности мощность двигателя 512, мощность первой вращающейся электрической машины MG1 или мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530, и передается по порядку от ведомой шестерни 530 на ведущие колеса 516 через шестерню 534 конечной передачи, шестерню 538 дифференциала, ось 540 и пр. В транспортном средстве 510 двигатель 512, первый блок 524 передачи мощности и первая вращающаяся электрическая машина MG1 расположены вдоль оси, отличной от оси, вдоль которой расположена вторая вращающаяся электрическая машина MG2, при этом осевая длина уменьшается. Кроме того, коэффициент редукции второй вращающейся электрической машины MG2 может увеличиться с использованием шестеренчатой пары из ведомой шестерни 530 и редуктора 558.
[0197] Транспортное средство 510 включает в себя электронный блок 580 управления, включающий в себя контроллер, который управляет устройствами, относящимися к движению. Электронный блок 580 управления включает в себя так называемый микрокомпьютер, включающий в себя, например, ЦП, ОЗУ, ПЗУ, интерфейсы ввода/вывода и пр. ЦП выполняет обработку сигналов в соответствии с программами, предварительно сохраненными в ПЗУ, при этом используя временную функцию хранения ОЗУ, таким образом, осуществляя различные виды управления транспортным средством 510. Например, электронный блок 580 управления выполнен с возможностью выполнения выходного управления двигателем 512, первой вращающейся электрической машиной MG1 и второй вращающейся электрической машиной MG2, управления изменением режима привода (описанным выше) и пр. При необходимости, электронный блок 580 управления подразделяется на электронный блок управления двигателем, электронный блок управления вращающейся электрической машиной, электронный блок управления гидравликой и пр.
[0198] Различные сигналы, основанные на определенных величинах от различных датчиков и пр., расположенных в транспортном средстве 510, подаются на электронный блок 580 управления. Различные датчики включают в себя, например, датчик 560 оборотов двигателя, датчик 562 выходной скорости вращения, датчик 564 скорости вращения MG1, например, синусо-косинусный вращающийся трансформатор, датчик 566 скорости вращения MG2, например, синусо-косинусный вращающийся трансформатор, датчик 568 величины перемещения акселератора, датчик 570 положения переключения, датчик 572 аккумулятора, датчик 574 гидравлического давления CR, датчик 576 температуры масла и пр. Различные сигналы включают в себя, например, обороты Ne двигателя, выходные обороты No, которые являются скоростью вращения ведущей шестерни 528, соответствующей скорости V транспортного средства, скорость Ng вращения машины MG1, скорость Nm вращения машины MG2, величину перемещения θасс акселератора, рабочее положение POSsh рычага переключения передач, температуру THbat аккумулятора, силу тока Ibat зарядки/разрядки аккумулятора и напряжение Vbat аккумулятора аккумуляторного блока 520, гидравлическое давление Pcr сцепления CR, температуру THoil рабочего масла, которая является температурой рабочего масла и пр. Различные командные сигналы подаются из электронного блока 580 управления на устройства, расположенные в транспортном средстве 510. Устройства включают в себя, например, двигатель 512, блок 518 управления мощностью, гидравлический контур 554 управления, насос ЭМН 555 и пр. Различные командные сигналы включают в себя, например, сигнал Se команды управления двигателем, сигнал Sm команды управления вращающейся электрической машиной, сигнал Sp команды управления гидравликой, сигнал Sop команды управления приводом насоса и пр. Электронный блок 580 управления вычисляет состояние зарядки (заряженное состояние) СЗ (далее именуемое емкостью аккумулятора СЗ) аккумуляторного блока 520 на основе, например, тока Ibat зарядки/разрядки аккумулятора, напряжения Vbat аккумулятора и пр.
[0199] Электронный блок 580 управления включает в себя средство управления гибридным транспортным средством (ГТС), то есть блок 582 гибридного управления, и средство изменения мощности передачи, то есть блок 584 изменения мощности передачи, с тем чтобы реализовать функции управления для различных органов управления в транспортном средстве 510.
[0200] Блок 582 гибридного управления выполняет управление выходной мощностью двигателя 512, при этом достигается целевой крутящий момент Те двигателя путем выдачи сигнала Se команды управления двигателем для управления открытым/закрытым состоянием электронного дроссельного клапана, управление количеством впрыскиваемого топлива и моментом впрыска, а также моментом задержки зажигания. Блок 582 гибридного управления выполняет управление выходной мощностью первой вращающейся электрической машиной MG1 или второй вращающейся электрической машиной MG2, при этом достигается целевой крутящий момент Tg MG1 или целевой крутящий момент Tm MG2, путем выдачи сигнала Sm команды управления вращающейся электрической машиной для управления работой первой вращающейся электрической машиной MG1 или второй вращающейся электрической машиной MG2 на блок 518 управления мощностью.
[0201] Блок 582 гибридного управления вычисляет приводной крутящий момент (требуемый приводной крутящий момент), который требуется при скорости V транспортного средства в это время, исходя из величины перемещения θacc акселератора, и заставляет, по меньшей мере, или двигатель 512, или первую вращающуюся электрическую машину MG1, или вторую вращающуюся электрическую машину MG2 генерировать требуемый приводной крутящий момент, при этом работа с низким потреблением топлива с меньшими выбросами выхлопных газов осуществляется с учетом требуемой величины зарядки (требуемой мощности для зарядки) и пр.
[0202] Блок 582 гибридного управления селективно устанавливает режим привода от электрического двигателя (режим привода ЭТС) или гибридный режим привода (режим привода ГТС) (именуемый также режимом привода от двигателя (режим привода ДВИГ)) как режим привода, устанавливаемый в соответствии со статусом движения. Режим привода ЭТС представляет собой режим управления, в котором обеспечивается режим привода ЭТС, использующий, по меньшей мере, либо первую вращающуюся электрическую машину MG1, либо вторую вращающуюся электрическую машину MG2 в качестве источника движущей силы, чтобы придать движение транспортному средству 510 в состоянии, когда работа двигателя 512 остановлена. Режим привода ГТС представляет собой режим управления, в котором обеспечивается режим привода ГТС (привод от двигателя), использующий, по меньшей мере, двигатель 512 в качестве источника движущей силы, чтобы придать движение транспортному средству 510 (то есть транспортное средство 510 движется путем передачи мощности двигателя 512 на ведущие колеса 516). Также режим, в котором мощность двигателя 512 преобразуется в электрическую энергию посредством генерирования мощности первой вращающейся электрической машиной MG1, и генерируемая электрическая энергия эксклюзивно переходит в аккумуляторный блок 520, даже если этот режим не основывается на движении транспортного средства 510, устанавливает двигатель 512 в рабочее состояние, при этом такой режим входит в режим привода ГТС.
[0203] Блок 584 изменения мощности передачи управляет работой сцеплений (рабочими статусами) сцепления С1, тормоза В1 и сцепления CR на основе режима привода, установленного блоком 582 гибридного управления. Блок 584 изменения мощности передачи выдает сигнал Sp команды управления гидравликой для соединения и/или разъединения сцепления С1, тормоза В1 и сцепления CR с гидравлическим контуром 554 управления, чтобы обеспечить передачу мощности для движения в режиме привода, установленного блоком 582 гибридного управления.
[0204] Режимы привода, которые могут выполняться транспортным средством 510, будут описаны со ссылкой на фиг. 19, и фиг. 20-27. Фиг. 19 представляет собой диаграмму работы сцепления, на которой показан рабочий статус каждого из следующего - сцепления С1, тормоза В1 и сцепления CR в каждом режиме привода. На диаграмме работы сцепления на фиг. 19, значок - кружок - обозначает сцепленное состояние соответствующего устройства сцепления (C1, B1, CR), пропуск - обозначает расцепленное состояние, а значок - треугольник - обозначает, что любое одно сцепление или оба включены в то время, когда тормоз двигателя, который переводит остановленный двигатель 512 в состояние совместного вращения, также используется. Кроме того, «G» обозначает, что вращающаяся электрическая машина (MG1, MG2) должна служить главным образом в качестве генератора, а «М» обозначает, что вращающаяся электрическая машина (MG1, MG2) должна служить главным образом в качестве электрического двигателя, когда вращающаяся электрическая машина (MG1, MG2) приводится в действие и должна служить, главным образом, в качестве генератора, когда вращающаяся электрическая машина (MG1, MG2) выполняет регенерацию. Как показано на фиг. 19, транспортное средство 510 способно селективно выполнять режим привода ЭТС и режим привода ГТС в качестве режима привода. Режим привода ЭТС включает в себя два режима, то есть режим ЭТС с одним электрическим двигателем и режим ЭТС с двумя электрическими двигателями. Режим ЭТС с одним электрическим двигателем представляет собой режим управления, в котором обеспечивается режим привода ЭТС, в котором используется вторая вращающаяся электрическая машина MG2 в качестве единственного источника движущей силы. Режим ЭТС с двумя электрическими двигателями представляет собой режим управления, в котором обеспечивается режим привода ЭТС, использующий первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 в качестве источника движущей силы. Режим привода ГТС включает в себя три режима, то есть режим повышающей передачи (ПОВ/П) на первичном валу (далее именуемый режимом ПОВ/П для ГТС), режим понижающей передачи (ПОН/П) на первичном валу (далее именуемый режимом ПОН/П для ГТ), и режим фиксированной передачи.
[0205] На фиг. 20-27 представлены номограммы, которые соответственно показывают скорости вращения вращающихся элементов RE1 - RE6 во втором планетарном зубчатом механизме 548 и первом планетарном зубчатом механизме 550. На этих номограммах вертикальные линии Y1 - Y4 обозначают скорости вращения вращающихся элементов. С левой стороны, если смотреть на лист, вертикальная линия Y1 обозначает скорость вращения первой солнечной шестерни S1, которая представляет собой пятый вращающийся элемент RE5, соединенный с первой вращающейся электрической машиной MG1, вертикальная линия Y2 обозначает скорость вращения второй солнечной шестерни S2, которая является первым вращающимся элементом RE1, соединенным с двигателем 512, вертикальная линия Y3 обозначает скорость вращения первого водила СА1, которое является шестым вращающимся элементом RE6, соединенным с ведущей шестерней 528, и скорость вращения второго водила СА2, которое является третьим вращающимся элементом RE3, селективно соединяющимся с корпусом 522 через тормоз В1, и вертикальная линия Y4 обозначает скорость вращения первой кольцевой шестерни R1, которая представляет собой четвертый вращающийся элемент RE4, и скорость вращения второй кольцевой шестерни R2, которая является вторым вращающимся элементом RE2, при этом первая кольцевая шестерня R1 и вторая кольцевая шестерня R2 соединены друг с другом. Стрелка, соединенная со значком незакрашенный квадрат, обозначает крутящий момент Tg машины MG1, стрелка, соединенная со значком незакрашенный кружок, обозначает крутящий момент Те двигателя, и стрелка, соединенная со значком закрашенный кружок, обозначает крутящий момент Tm машины MG2. Нарисованное линиями С1, которое селективно соединяет вторую солнечную шестерню S2 со вторым водилом СА2, обозначает разъединенное состояние сцепления С1, и заштрихованное (затемненное) сцепление С1 обозначает зацепленное состояние сцепления С1. Значок незакрашенный ромб на тормозе В1, который селективно соединяет второе водило СА2 с корпусом 522, обозначает расцепленное состояние тормоза B1, а значок закрашенный ромб обозначает зацепленное состояние тормоза В1. Значок незакрашенный ромб на сцеплении CR, которое селективно соединяет первое водило СА1 со вторым водилом СА2, обозначает расцепленное состояние сцепления CR, а значок закрашенный ромб обозначает зацепленное состояние сцепления CR. Прямая линия, которая соответственно представляет скорости вращения, относящие ко второму планетарному зубчатому механизму 548, обозначена сплошной линией, а прямая линия, которая соответственно представляет скорости вращения, относящиеся к первому планетарному зубчатому механизму 550, обозначена штриховой линией. Стрелка, соединенная со значком закрашенный кружок, обозначает крутящий момент Tm машины MG2, генерируемый второй вращающейся электрической машиной MG2, которая приводится в действие путем использования электрической энергии, генерируемая первой вращающейся электрической машиной MG1 с использованием мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, и не включают в себя прямой крутящий момент двигателя. Значок закрашенный ромб на сцеплении CR перекрывается значком закрашенный кружок, при этом значок закрашенный ромб на сцеплении CR не показан на чертежах.
[0206] На фиг. 20 представлена номограмма в режиме ЭТС с одним электрическим двигателем. Как показано на фиг. 19, режим ЭТС с одним электрическим двигателем осуществляется в состоянии, когда и сцепление С1, и тормоз В1, и сцепление CR находятся в состоянии расцеплено. В режиме ЭТС с одним электрическим двигателем, сцепление С1 и тормоз В1 находятся в состоянии расцеплены, относительное движение первого планетарного зубчатого механизма 550 разрешено, и первый дифференциал 546 переходит в нейтральное состояние. Блок 582 гибридного управления останавливает работу двигателя 512 и выдает крутящий момент Tm машины MG2, чтобы придать движение транспортному средству 510 от второй вращающейся электрической машины MG2. Фиг. 20 показывает случай в то время, когда транспортное средство 510 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении (то есть направление вращения первого водила СА1 в то время, когда транспортное средство 510 движется вперед) для выдачи положительного крутящего момента. В то время, когда транспортное средство 510 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении в отличии от работы напротив в то время, когда транспортное средство 510 движется вперед. В то время как транспортное средство 510 движется, первое водило СА1, соединенное с ведущей шестерней 528, вращается синхронно с вращением второй вращающейся электрической машины MG2 (что является синонимом вращения ведущих колес 516). В режиме ЭТС с одним электрическим двигателем, сцепление CR дополнительно расцепляется, при этом двигатель 512 и первая вращающаяся электрическая машина MG1 совместно не вращаются, притом обороты Ne двигателя и скорость Ng вращения MG1 могут быть установлены на ноль. При такой конфигурации, можно повысить эффективность расходования электрической энергии (то есть снизить потребление электрической энергии) путем уменьшения потерь на сопротивлении каждого из следующего - двигателя 512 и первой вращающейся электрической машины MG1. Блок 582 гибридного управления поддерживает скорость Ng вращения MG1 на нуле путем управления с обратной связью. Как вариант, блок 582 гибридного управления поддерживает скорость Ng вращения MG1 на нуле путем осуществления управления (управления по оси d) для пропускания тока на первую вращающуюся электрическую машину MG1, при этом вращение первой вращающейся электрической машины MG1 застопорено. В качестве альтернативного варианта, когда скорость Ng вращения MG1 поддерживается на нуле путем пульсации крутящего момента первой вращающейся электрической машины MG1, даже когда крутящий момент Tg машины MG1 устанавливается на ноль, не требуется добавления крутящего момента Tg машины MG1. Даже когда управление поддержанием скорости Ng вращения MG1 на нуле выполнено, то поскольку первый блок 524 передачи мощности находится в нейтральном состоянии, в котором сила противодействия крутящему моменту Tg машины MG1 выдаваться не может, приводной крутящий момент это не затрагивает. В режиме ЭТС с одним электрическим двигателем первая вращающаяся электрическая машина MG1 может быть переведена в состояние отсутствия нагрузки на холостой ход С.
[0207] В режиме ЭТС с одним электрическим двигателем, остановленный двигатель 512 не вращается совместно и переходит в остановленное состояние на нулевое вращение, при этом, когда регенеративное управление выполняется применительно ко второй вращающейся электрической машине MG2, в то время как транспортное средство 510 движется в режиме ЭТС с одним электрическим двигателем, можно получить большое количество регенеративной электрической энергии. Когда аккумуляторный блок 520 переходит в полностью заряженное состояние и не может накапливать регенеративную энергию, в то время как транспортное средство 510 движется в режиме ЭТС с одним электрическим двигателем, можно дополнительно использовать двигатель как тормоз. Когда дополнительно двигатель используется как тормоз, сцепление С1 или сцепление CR находится в состоянии сцеплено (см. дополнительно двигатель используется как тормоз в режиме ЭТС с одним электрическим двигателем) как показано на фиг. 19. Когда сцепление С1 или сцепление CR находится в состоянии сцепления, двигатель 512 переходит в состояние совместного вращения. Когда обороты Ne двигателя увеличиваются первой вращающейся электрической машиной MG1 в этом состоянии, можно заставить двигатель работать как тормоз. Обороты Ne двигателя могут быть установлены на ноль даже в состоянии совместного вращения двигателя 512. В этом случае режим привода ЭТС выполняется, не заставляя двигатель работать как тормоз. Двигатель может работать как тормоз путем включения тормоза В1.
[0208] На фиг. 21 представлена номограмма в режиме ЭТС с двумя электрическими двигателями. Как показано на фиг. 19, режим ЭТС с двумя электрическими двигателями осуществляется в состоянии, когда сцепление С1 и тормоз В1 включены, а сцепление CR расцеплено. В режиме ЭТС с двумя электрическими двигателями, сцепление С1 и тормоз В1 включены, а относительное движение первого планетарного зубчатого механизма 550 запрещено, при этом вращение второго водила СА2 остановлено. По этой причине вращение всех вращающихся элементов первого планетарного зубчатого механизма 550 остановлено, при этом первый дифференциал 546 устанавливается в состояние внутренней блокировки. Таким образом, двигатель 512 переходит в остановленное состояние на нулевое вращение, и первая кольцевая шестерня R1, соединенная со второй кольцевой шестерней R2, также фиксируется при нулевом вращении. Когда первая кольцевая шестерня R1 фиксируется так, чтобы быть неповоротной, противодействующий крутящий момент против крутящего момента Tg машины MG1 выдается первой кольцевой шестерней R1, при этом можно создавать крутящий момент на основе крутящего момента Tg машины MG1, механически выдаваемого от первого водила СА1 и передаваемого на ведущие колеса 516. Блок 582 гибридного управления останавливает работу двигателя 512 и заставляет первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 выдавать крутящий момент Tg машины MG1 и крутящий момент Tm машины MG2, чтобы придать движение транспортному средству 510. На фиг. 21 показан случай, когда транспортное средство 510 движется вперед в состоянии, когда и первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 вращаются в положительном направлении для выдачи положительного крутящего момента. В то время, когда транспортное средство 510 движется назад, первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 вращаются в обратном направлении в отличие от работы в то время, когда транспортное средство 510 движется вперед.
[0209] Как описано со ссылкой на фиг. 20 и фиг. 21, можно приводить в движение транспортное средство 510 с использованием только второй вращающейся электрической машины MG2 в режиме ЭТС с одним электрическим двигателем, и можно приводить в движение транспортное средство 510 с использованием первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2 в режиме ЭТС с двумя электрическими двигателями. Поэтому, когда транспортное средство 510 выполняет режим привода ЭТС, при низкой нагрузке устанавливается режим ЭТС с одним электрическим двигателем, и транспортное средство 510 приводится в действие только второй вращающейся электрической машиной MG2, при высокой нагрузке устанавливается режим ЭТС с двумя электрическими двигателями и транспортное средство 510 приводится в действие и первой вращающейся электрической машиной MG1, и второй вращающейся электрической машиной MG2. Включая режим привода ГТС, регенерация во время замедления транспортного средства 510, главным образом, выполняется второй вращающейся электрической машиной MG2.
[0210] На фиг. 22 представлена номограмма в режиме ПОВ/П для ГТС в режиме привода ГТС. Как показано на фиг. 19, режим ПОВ/П для ГТС осуществляется в состоянии, когда сцепление С1 и тормоз В1 разъединены, а сцепление CR находится в состоянии сцеплено. В режиме ПОВ/П для ГТС, сцепление CR сцеплено, при этом второй дифференциал 544 и первый дифференциал 546 образуют единый дифференциальный механизм. Кроме того, в режиме ПОВ/П для ГТС сцепление С1 и тормоз В1 разъединены, при этом второй дифференциал 544 и первый дифференциал 546 в целом образуют вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности одного второго дифференциала 544. Таким образом, в первом блоке 524 передачи мощности мощность двигателя 512, сообщенная второй солнечной шестерней S2, может распределяться между первой солнечной шестерней SI и первым водилом СА1. То есть в первом блоке 524 передачи мощности прямой крутящий момент двигателя механически передается на первое водило СА1, заставляя первую вращающуюся электрическую машину MG1 обеспечивать силу противодействующую против крутящего момента Те двигателя, сообщаемого второй солнечной шестерней S2, а электрическая энергия, генерируемая первой вращающейся электрической машиной MG1 путем использования мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, передается на вторую вращающуюся электрическую машину MG2 через заданный электрический контур. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, и заставляет крутящий момент Tm машины MG2 быть выданным из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. Фиг. 22 показывает случай, в то время, когда транспортное средство 510 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении, выдается положительный крутящий момент. В то время, когда транспортное средство 510 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении в отличие от работы в то время, когда транспортное средство 510 движется вперед. Когда транспортное средство 510 движется назад, положительное вращение и крутящий момент двигателя 512 напрямую сообщаются компонентам, которые составляют функцию вариатора электрической машины, то есть достигается входное вращение вперед двигателя.
[0211] На фиг. 23 представлена номограмма в то время, когда транспортное средство 510 движется вперед в режиме ПОН/П для ГТС в режиме привода ГТС. Как показано на фиг. 19, движение вперед в режиме ПОН/П для ГТС (далее именуемом режимом ПОН/П для ГТС (движение вперед)) осуществляется в состоянии, когда сцепление С1 находится в состоянии сцеплено, а тормоз В1 и сцепление CR разъединены. В режиме ПОН/П для ГТС (движение вперед), сцепление C1 находится в состоянии сцеплено, тормоз В1 разъединен, и первый дифференциал 546 переходит в состояние прямого соединения, при этом мощность двигателя 512 напрямую передается на первую кольцевую шестерню R1, соединенную со второй кольцевой шестерней R2. Кроме того, в режиме ПОН/П для ГТС (движение вперед), сцепление CR разъединено, и второй дифференциал 544 в одиночку образует вариатор электрической машины. Таким образом, первый блок 524 передачи мощности способен распределять мощность двигателя 512, сообщенную первой кольцевой шестерне R1, между первой солнечной шестерней S1 и первым водилом СА1. То есть в первом блоке 524 передачи мощности прямой крутящий момент двигателя механически передается на первое водило СА1 путем создания противодействующей силы против крутящего момента Те двигателя, которая сообщается первой кольцевой шестерне R1, с использованием первой вращающейся электрической машины MG1, а электрическая энергия, генерируемая первой вращающейся электрической машиной MG1 путем использования мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, передается на вторую вращающуюся электрическую машину MG2 через заданный электрический контур. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1 против крутящего момента Те двигателя выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. Фиг. 23 показывает случай, когда транспортное средство 510 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении для выдачи положительного крутящего момента.
[0212] На фиг. 24 представлена номограмма, когда транспортное средство 510 движется назад в режиме ПОН/П для ГТС в режиме привода ГТС, и показывает случай подвода крутящего момента при реверсном вращении двигателя, где вращение и крутящий момент двигателя 512 преобразуются в отрицательные величины и затем сообщаются компонентам, которые осуществляют функции вариатора электрической машины. Как показано на фиг. 19, движение задним ходом при подводе крутящего момента при реверсном вращении двигателя в режиме ПОН/П для ГТС (далее именуемом режимом ПОН/П для ГТС при подводе крутящего момента при реверсном вращении двигателя (движение задним ходом)) осуществляется в состоянии, когда тормоз В1 находится в состоянии сцеплено, а сцепление С1 и сцепление CR разъединены. В режиме ПОН/П для ГТС для ввода обратного вращения (движение задним ходом), сцепление С1 расцеплено, а тормоз В1 находится в состоянии сцеплено, и первый дифференциал 546 переходит в состояние изменения скорости реверсного вращения двигателя 512, при этом находятся в состоянии расцеплено и отрицательном крутящем моменте на первую кольцевую шестерню R1, соединенную со второй кольцевой шестерней R2. Кроме того, в режиме ПОН/П для ГТС для ввода обратного вращения (движение задним ходом), сцепление CR расцеплено, при этом второй дифференциал 544 в одиночку образует вариатор электрической машины. При такой конфигурации в первом блоке 524 передачи мощности можно распределять мощность двигателя 512, которая сообщается первой кольцевой шестерне R1 при обратном вращении, между первой солнечной шестерней S1 и первым водилом СА1. Блок 582 гибридного управления управляет двигателем 512 и заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, а крутящий момент Tm машины MG2 выдается из второй вращающейся электрической машины MG2 с использованием электрической энергии, генерируемой первой вращающейся электрической машиной MG1. В примере, показанном на фиг. 24, поскольку первая вращающаяся электрическая машина MG1, которая выдает отрицательный крутящий момент, переходит в область отрицательного вращения, вторая вращающаяся электрическая машина MG2 выдает положительный крутящий момент при отрицательном вращении, чтобы генерировать электрическую энергию, которая используется для прокрутки первой вращающейся электрической машины MG1. Однако, движение задним ходом возможно, поскольку прямой крутящий момент двигателя (не показан), который представляет собой отрицательный крутящий момент, больше по абсолютной величине, чем крутящий момент Tm машины MG2.
[0213] На фиг. 25 представлена номограмма, в то время, когда транспортное средство 510 движется назад в режиме ПОН/П для ГТС в режиме привода ГТС, и показывает случай подвода крутящего момента при вращении двигателя для направления вперед. Как показано на фиг. 19, движение задним ходом при подводе крутящего момента при прямом вращении двигателя в режиме ПОН/П для ГТС (далее именуемым режимом ПОН/П для ГТС с подводом крутящего момента при прямом вращении двигателя (движение задним ходом)) осуществляется в состоянии, когда сцепление С1 сцеплено, а тормоз В1 и сцепление CR разъединены. В режиме ПОН/П для ГТС с подводом крутящего момента при прямом вращении двигателя (движение задним ходом), сцепление С1 находится в состоянии сцеплено и тормоз В1 разъединен, при этом первый дифференциал 546 переходит в состояние прямого соединения с тем результатом, что мощность двигателя 512 напрямую передается на первую кольцевую шестерню R1, соединенную со второй кольцевой шестерней R2. Кроме того, в режиме ПОН/П для ГТС с подводом крутящего момента при прямом вращении двигателя (движение задним ходом) сцепление CR расцеплено, при этом второй дифференциал 544 в одиночку образует вариатор электрической машины. Таким образом, первый блок 524 передачи мощности способен распределять мощность двигателя 512, которая сообщается первой кольцевой шестерне R1, между первой солнечной шестерней S1 и первым водилом СА1. Блок 582 гибридного управления управляет двигателем 512 и заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, а крутящий момент Tm машины MG2 выдается из второй вращающейся электрической машины MG2 с использованием электрической энергии, генерируемой первой вращающейся электрической машиной MG1. Фиг. 25 показывает случай, когда транспортное средство 510 движется назад в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в отрицательном направлении для выдачи отрицательного крутящего момента.
[0214] Как описано со ссылкой на фиг. 22-25, режим ПОВ/П для ГТС и режим ПОН/П для ГТС отличаются друг от друга вращающимся элементом, которому сообщается мощность двигателя 512 компонентами, которые осуществляют функции вариатора электрической машины, при этом режим ПОВ/П для ГТС и режим ПОН/П для ГТС отличаются друг от друга коэффициентом распределения мощности в то время, когда первый блок 524 передачи мощности должен служить в качестве вариатора электрической машины. То есть соотношение между выходными крутящими моментами вращающихся электрических машин MG1, MG2 и соотношение между скоростями вращения вращающихся электрических машин MG1, MG2 по отношению к двигателю 512 может меняться между режимом ПОВ/П для ГТС и режимом ПОН/П для ГТС. Рабочий статус сцепления CR меняется, чтобы изменить отношение выходного крутящего момента или скорости вращения каждой из вращающихся электрических машин MG1, MG2 по отношению к выходному крутящему моменту или оборотам двигателя 512 во время привода от двигателя.
[0215] Прямой крутящий момент двигателя в режиме ПОВ/П для ГТС уменьшается по сравнению с крутящим моментом Те двигателя. С другой стороны, прямой крутящий момент двигателя в режиме ПОН/П для ГТС (движение вперед) увеличивается по сравнению с крутящим моментом Те двигателя. В настоящем варианте осуществления второй дифференциал 544 в одиночку образует вариатор электрической машины в режиме ПОН/П для ГТС (см. фиг. 23). Таким образом, когда дифференциальный статус второго дифференциала 544 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено, а сцепление CR находится в состоянии расцеплено, крутящий момент, увеличившийся по сравнению с крутящим моментом Те двигателя, механически передается на первое водило СА1.
[0216] В состоянии так называемой механической точки, в которой скорость Ng вращения MG1 устанавливается на ноль, и мощность двигателя 512 полностью передается механически на первое водило СА1 без прохождения через электрический контур (контур передачи электрической энергии, который представляет собой электрический контур, связанный с обменом электрической энергией, поступающей или исходящей из первой вращающейся электрической машины MG1 или второй вращающаяся электрическая машина MG2), случай состояния повышающей передачи, где вращение двигателя 512 увеличивается и выдается от первого водила СА1, является режимом ПОВ/П для ГТС, а случай состояния понижающей передачи, где вращение двигателя 512 уменьшается и выдается от первого водила СА1, является режимом ПОН/П для ГТС.
[0217] На фиг. 26 представлена номограмма в режиме с неподвижной шестерней в режиме привода ГТС и показывает случай прямого соединения, где вращающиеся элементы второго дифференциала 544 и первый дифференциал 546 вращаются как одно целое. Как показано на фиг. 19, прямое соединение в режиме с неподвижной шестерней (далее именуемом режимом фиксированной передачи с прямым соединением) осуществляется в состоянии, когда сцепление С1 и сцепление CR включены, а тормоз В1 находится в состоянии расцеплено. В режиме фиксированной передачи с прямым соединением сцепление С1 сцеплено, а тормоз В1 расцеплен, при этом первый дифференциал 546 переходит в состояние прямого соединения. Кроме того, в режиме фиксированной передачи с прямым соединением сцепление CR сцеплено, при этом вращающиеся элементы второго дифференциала 544 и первый дифференциал 546 вращаются как одно целое. Таким образом, первый блок 524 передачи мощности способен напрямую выдавать мощность двигателя 512 от первого водила СА1. Блок 582 гибридного управления заставляет двигатель 512 выдавать крутящий момент Те двигателя, чтобы придать движение транспортному средству 510. В режиме фиксированной передачи с прямым соединением, также можно напрямую выдавать мощность первой вращающейся электрической машины MG1 от первого водила СА1 путем приведения в действие первой вращающейся электрической машины MG1 с использованием электрической энергии аккумуляторного блока 520. В режиме фиксированной передачи с прямым соединением также можно передавать мощность второй вращающейся электрической машины MG2 на ведущие колеса 516 путем приведения в действие второй вращающейся электрической машины MG2 с использованием электрической энергии аккумуляторного блока 520. Таким образом, блок 582 гибридного управления может не только обеспечить выдачу крутящего момента Те двигателя, но и заставить также, по меньшей мере, либо первую вращающуюся электрическую машину MG1, либо вторую вращающуюся электрическую машину MG2 выдавать крутящий момент, чтобы придать движение транспортному средству 510. То есть в режиме фиксированной передачи с прямым соединением, транспортное средство 510 может приводиться в движение только двигателем 512 или же ему может помогать крутящий момент, который генерируется первой вращающейся электрической машиной MG1 и/или второй вращающейся электрической машиной MG2.
[0218] На фиг. 27 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС и показывает случай стопорения выходного вала, где первое водило СА1 фиксируется так, чтобы быть невращающимся. Как показано на фиг. 19, выходной вал, фиксирующийся в режиме с неподвижной шестерней (далее именуемый режимом фиксированной передачи на выходном валу) осуществляется в состоянии, когда тормоз В1 и сцепление CR включены, а сцепление С1 разъединено. В режиме фиксированной передачи на выходном валу, сцепление CR сцеплено, при этом второй дифференциал 544 и первый дифференциал 546 образуют один дифференциальный механизм. Кроме того, в режиме фиксированной передачи на выходном валу, тормоз В1 сцеплен, а сцепление С1 разъединено, при этом первое водило СА1 фиксируется так, чтобы быть неповоротным. Таким образом, первый блок 524 передачи мощности способен обеспечивать противодействующую силу против мощности двигателя 512, сообщаемого второй солнечной шестерней S2, с использованием первой вращающейся электрической машины MG1. Поэтому в режиме фиксированной передачи на выходном валу, можно заряжать аккумуляторный блок 520 электрической энергией, генерируемой первой вращающейся электрической машиной MG1 с использованием мощности двигателя 512. Блок 582 гибридного управления управляет двигателем 512, создает противодействующую силу против мощности двигателя 512 посредством генерирования мощности первой вращающейся электрической машины MG1, и заряжает аккумуляторный блок 520 электрической энергией, генерируемой первой вращающейся электрической машиной MG1 через блок 518 управления мощностью. Поскольку первое водило СА1 фиксируется так, чтобы быть неповоротным в режиме фиксированной передачи на выходном валу, режим фиксированной передачи на выходном валу представляет собой режим, в котором аккумуляторный блок 520 эксклюзивно заряжается во время остановки транспортного средства 510. Как описано со ссылкой на фиг. 26 и фиг. 27, в режиме фиксированной передачи с прямым соединением или режиме фиксированной передачи на выходном валу в режиме привода ГТС, сцепление CR находится в состоянии сцеплено.
[0219] На фиг. 5 представлена диаграмма, на которой показан пример отношения крутящих моментов (Tg/Te) крутящего момента Tg машины MG1 к крутящему моменту Те двигателя, и отношение крутящих моментов (Tm/Те) крутящего момента Tm машины MG2 к крутящему моменту Те двигателя во время привода от двигателя при движении вперед. Крутящий момент Tm машины MG2 генерируется второй вращающейся электрической машиной MG2, которая приводится в действие электрической энергией, генерируемой первой вращающейся электрической машиной MG1 с использованием мощности двигателя 512. На фиг. 5, в области, в которой коэффициент I редукции (= Ne/No) первого блока 524 передачи мощности относительно велик, отношение крутящих моментов (Tm/Те) в режиме ПОН/П для ГТС меньше, чем отношение крутящих моментов (Tm/Те) в режиме ПОВ/П для ГТС. Поэтому в области, в которой коэффициент I редукции относительно велик, когда режим ПОН/П для ГТС установлен, можно уменьшить нагрузку на вторую вращающуюся электрическую машину MG2 по отношению к крутящему моменту Те двигателя. Например, когда режим ПОН/П для ГТС установлен при высокой нагрузке двигателя 512, в котором используется относительно большой коэффициент I редукции, крутящий момент Tm машины MG2 уменьшается. Это означает, что режим ПОН/П для ГТС пригоден для большого коэффициента I редукции при максимальной величине крутящего момента Tm машины MG2, чем режим ПОВ/П для ГТС, и означает, что область режима привода ГТС может быть расширена. С другой стороны, в области, в которой коэффициент I редукции относительно небольшой и меньше, чем «1», абсолютная величина отношения крутящих моментов (Tm/Те) в режиме ПОН/П для ГТС больше, чем абсолютная величина отношения крутящих моментов (Tm/Те) в режиме ПОВ/П для ГТС. Состояние, где отношение крутящих моментов (Tm/Те) представляет собой отрицательную величину, представляет собой состояние циркуляции мощности, где вторая вращающаяся электрическая машина MG2 генерирует электрическую энергию, и генерируемая электрическая энергия подается на первую вращающуюся электрическую машину MG1. Желательно предотвратить или снизить состояние циркуляции мощности в наиболее возможной степени. По этой причине в области, в которой коэффициент I редукции относительно мал, можно уменьшить циркуляцию мощности путем установки режима ПОВ/П для ГТС. Путем изменения режима управления между режимом ПОН/П для ГТС и режимом ПОВ/П для ГТС в соответствии с коэффициентом I редукции, можно передавать мощность двигателя с использованием второй вращающейся электрической машины MG2, имеющей меньший крутящий момент.
[0220] На фиг. 28 представлена диаграмма, на которой показан пример отношения скоростей вращения (Ng/Ne) скорости вращения машины MG1 Ng к оборотам Ne двигателя и отношение скоростей вращения (Nm/Ne) скорости вращения машины MG2 Nm к оборотам Ne двигателя во время привода от двигателя при движении вперед. На фиг. 28, в области, в которой коэффициент I редукции первого блока 524 передачи мощности относительно велик и больше «1», абсолютная величина отношения скоростей вращения (Ng/Ne) в режиме ПОН/П для ГТС меньше, чем абсолютная величина отношения скоростей вращения (Ng/Ne) в режиме ПОВ/П для ГТС. Поэтому в области, в которой коэффициент I редукции относительно велик, можно уменьшить возрастание скорости Ng вращения MG1 путем установки режима ПОН/П для ГТС. Например, когда режим ПОН/П для ГТС установлен в то время, когда транспортное средство 510 начинает двигаться, то есть когда используется относительно большой коэффициент I редукции, скорость Ng вращения MG1 уменьшается. С другой стороны, в области, в которой коэффициент I редукции относительно небольшой и меньше «1», абсолютная величина отношения скоростей вращения (Ng/Ne) в режиме ПОН/П для ГТС больше, чем абсолютная величина отношения скоростей вращения (Ng/Ne) в режиме ПОВ/П для ГТС. По этой причине в области, в которой коэффициент I редукции относительно мал, можно уменьшить возрастание скорости Ng вращения MG1 путем установки режима ПОВ/П для ГТС. Путем изменения режима управления между режимом ПОН/П для ГТС и режимом ПОВ/П для ГТС в соответствии с коэффициентам I редукции, можно передавать мощность двигателя с использованием первой вращающейся электрической машины MG1, имеющую меньшую скорость вращения.
[0221] На фиг. 29 представлена диаграмма, на которой показан пример отношения мощностей (Pg/Pe) - мощности Pg машины MG1 к мощности Ре двигателя и отношение мощностей (Pm/Ре) - мощности Pm машины MG2 к мощности Ре двигателя во время привода от двигателя при движении вперед. На фиг. 29 в области, в которой коэффициент I редукции первого блока 524 передачи мощности относительно велик, абсолютная величина каждого из отношений - отношения мощностей (Pg/Pe) и отношение мощностей (Pm/Ре) в режиме ПОН/П для ГТС меньше, чем абсолютная величина каждого из отношений - отношения мощностей (Pg/Pe) и отношения мощностей (Pm/Ре) в режиме ПОВ/П для ГТС. Поэтому в области, в которой коэффициент I редукции относительно велик, можно уменьшить возрастание мощности Pg машины MG1 и возрастание мощности Pm машины MG2 путем установки режима ПОН/П для ГТС.С другой стороны, в области, в которой коэффициент I редукции относительно небольшой и меньше «1», абсолютная величина каждого из отношений - отношения мощностей (Pg/Pe) и отношения мощностей (Pm/Pe) в режиме ПОН/П для ГТС больше, чем абсолютная величина каждого из отношений - отношения мощностей (Pg/Pe) и отношения мощностей (Pm/Ре) в режиме ПОВ/П для ГТС. Состояние, где отношение мощностей (Pm/Ре) представляет собой отрицательную величину (то есть состояние, где отношение мощностей (Pg/Pe) представляет собой положительную величину), является состоянием циркуляции мощности. По этой причине в области, в которой коэффициент I редукции относительно мал, можно уменьшить циркуляцию мощности путем установки режима ПОВ/П для ГТС. Путем изменения режима управления между режимом ПОН/П для ГТС и режимом ПОВ/П для ГТС в соответствии с коэффициент I редукции, можно передавать мощность двигателя с использованием вращающихся электрических машин MG1, MG2, имеющих меньшую выходную мощность (меньшую мощность).
[0222] Как описано со ссылкой на фиг. 5 и фиг. 28-29, режим ПОН/П для ГТС установлен при высокой нагрузке двигателя 512, при которой используется относительно большой коэффициент I редукции, и режим ПОВ/П для ГТС установлен при низкой нагрузке двигателя 512 или высокой скорости транспортного средства, при которых используется относительно небольшой коэффициент I редукции. Таким образом, селективно используется режим ПОН/П для ГТС или режим ПОВ/П для ГТС. В результате, возрастание крутящего момента или скорости вращения каждой из вращающихся электрических машин MG1, MG2 предотвращается или снижается, и циркуляция мощности уменьшается при высокой скорости транспортного средства. Это ведет к снижению потерь при преобразовании энергии в электрическом контуре и совершенствованию потребления топлива. Как варианта, это ведет к уменьшению размеров каждой из вращающихся электрических машин MG1, MG2.
[0223] И в режиме ПОН/П для ГТС и в режиме ПОВ/П для ГТС первый блок 524 передачи мощности должен служить в качестве вариатора электрической машины. Состояние, где коэффициент I редукции первого блока 524 передачи мощности составляет «1», представляет собой состояние, эквивалентное состоянию режима фиксированной передачи с прямым соединением, в котором сцепление С1 и сцепление CR оба включены (см. фиг. 26). Поэтому предпочтительно, что блок 582 гибридного управления меняет режим управления между режимом ПОН/П для ГТС (движение вперед), в котором сцепление С1 находится в состоянии сцеплено, и режимом ПОВ/П для ГТС, в котором сцепление CR находится в состоянии сцеплено, путем изменения рабочих статусов сцепления С1 и сцепления CR во время синхронизации состояния, где коэффициент I редукции составляет «1».
[0224] На фиг. 30 и фиг. 31 представлены схемы, на которых показаны примеры карты изменения режима привода, используемой при управлении по изменению режима привода между режимом привода с помощью двигателя и режимом привода с помощью электрического двигателя. Каждая такая карта изменения режима привода показывает зависимость, имеющую граничные линии, между областью привода от двигателя и областью режима привода с помощью электрического двигателя при скорости V транспортного средства и нагрузкой транспортного средства 510 при движении (далее именуемой нагрузкой транспортного средства) (например, требуемого приводного крутящего момента) в качестве переменных, и которые получают эмпирически, либо они заложены при конструировании и запомнены заранее (то есть определяются заранее). Фиг. 30 показывает переходы состояний системы 514 передачи мощности (то есть изменения режима привода транспортного средства 510) при движении при поддержании зарядки (ПЗ), где транспортное средство 510 движется в состоянии, когда поддерживается емкость аккумулятора СЗ. Фиг. 30 применяется для случая, когда транспортное средство 510 является, например, гибридным транспортным средством и пр., емкость аккумулятора СЗ которого изначально установлена на небольшую емкость. Фиг. 30 применяется для случая, когда режим поддержания емкости аккумулятора СЗ установлен для ситуации, когда транспортное средство 510 является, например, гибридным транспортным средством, подзаряжаемым от сети, транспортным средством с увеличенным радиусом действия и пр., емкость аккумулятора СЗ которого изначально установлена на относительно большую емкость. С другой стороны, фиг. 31 показывает переходы состояний системы 514 передачи мощности (то есть изменения режима привода транспортного средства 510) при движении с расходованием зарядки (РЗ), где транспортное средство 510 движется, расходуя емкость аккумулятора СЗ. Фиг. 31 применяется для случая, когда режим, в котором емкость аккумулятора СЗ расходуется, установлен для ситуации, когда транспортное средство 510 представляет собой, например, гибридное транспортное средство, подзаряжаемое от сети, транспортное средство с увеличенным радиусом действия и пр., емкость аккумулятора СЗ которого изначально установлена на относительно большую емкость. Когда транспортное средство 510 представляет собой, например, гибридное транспортное средство и пр., емкость аккумулятора СЗ которого изначально установлена на относительно небольшую емкость, желательно не использовать фиг. 31.
[0225] На фиг. 30 область каждого режим привода устанавливается в соответствии с режимом движения, например, скоростью V транспортного средства и нагрузкой транспортного средства, при этом режим ПОН/П для ГТС имеет тенденцию, чтобы быть установленным при высокой нагрузке, а режим ПОВ/П для ГТС имеет тенденцию, чтобы быть установленным при низкой нагрузке или высокой скорости транспортного средства. В режиме фиксированной передачи с прямым соединением нет передачи мощности через вращающиеся электрические машины MG1, MG2, при этом исчезают тепловые потери, возникающие из-за преобразования между механической энергией и электрической энергией. Таким образом, режим фиксированной передачи с прямым соединением предпочтителен для совершенствования потребления топлива и избегания генерирования тепла. По этой причине при высокой нагрузке, например, буксировке, или при высокой скорости транспортного средства, устанавливается область режима фиксированной передачи с прямым соединением, при этом режим фиксированной передачи с прямым соединением активно устанавливается. Когда аккумуляторный блок 520 способен выдавать электрическую энергию (или когда прогрев двигателя 512 и прогрев устройства посредством работы двигателя 512 завершен), прокрутка второй вращающейся электрической машины MG2 выполняется в режиме привода ЭТС в области, в которой эффективность работы двигателя 512 падает. По этой причине при низкой скорости транспортного средства и в области низкой нагрузки, обозначенной штриховой линией, устанавливается область режима ЭТС с одним электрическим двигателем. Когда нагрузка транспортного средства отрицательная, транспортное средство 510 замедляет ход, заставляя двигатель работать в режиме торможения, используя отрицательный крутящий момент двигателя 512 в режиме ПОН/П для ГТС или в режиме ПОВ/П для ГТС. Когда аккумуляторный блок 520 способен принимать электрическую энергию, вторая вращающаяся электрическая машина MG2 регенерирует электрическую энергию в режиме привода ЭТС. По этой причине в области отрицательной нагрузки транспортного средства, обозначенной чередующейся длинной и короткой пунктирной линией, устанавливается область режима ЭТС с одним электрическим двигателем. В установленной таким образом карте изменения режима привода при движении в режиме ПЗ, например, в то время, когда транспортное средство 510 начинает двигаться, режим ПОН/П для ГТС устанавливается вместе с движением вперед или движением задним ходом. Таким образом, мощность двигателя Ре используется более эффективно, при этом возрастает в способность к ускорению из режима остановки. С возрастанием скорости V транспортного средства при движении вперед, коэффициент I редукции первого блока 524 передачи мощности становится близким к «1». В этом состоянии режим управления переключается в режим фиксированной передачи с прямым соединением. При движении транспортного средства с низкой скоростью, обороты Ne двигателя становится чрезвычайно низкими, при этом режим управления напрямую переключается из режима ПОН/П для ГТС в режим ПОВ/П для ГТС. Когда переключатель выбора режима привода ЭТС приводится в действие водителем, и выбирается режим привода ЭТС, режим ЭТС с одним электрическим двигателем устанавливается в области, обозначенной штриховой линией.
[0226] На фиг. 31 область каждого режима привода устанавливается в соответствии со статусом движения, например, скоростью V транспортного средства и нагрузкой транспортного средства, при этом режим ЭТС с одним электрическим двигателем устанавливается в области низкой нагрузки транспортного средства, и режим ЭТС с двумя электрическими двигателями устанавливается в области высокой нагрузки транспортного средства. В режиме ЭТС с двумя электрическими двигателями соотношение распределения мощности между первой вращающейся электрической машиной MG1 и второй вращающейся электрической машиной MG2 определяется на основе рабочей эффективности и первой вращающейся электрической машины MG1, и второй вращающейся электрической машины MG2 (в целях, например, повышения эффективности расходования электрической энергии, уменьшения температуры каждой из вращающихся электрических машин MG1, MG2, уменьшения температуры блока 518 управления мощностью, и пр.). В зависимости от максимальной мощности каждой из вращающихся электрических машин MG1, MG2, или когда возрастание скорости вращения любого из вращающихся элементов системы 514 передачи мощности вызвано возрастанием скорости V транспортного средства в режиме привода ЭТС уменьшается путем приведения в действие двигателя 512, состояние может переключаться в состояние, в котором двигатель 512 используется в качестве источника движущей силы, чтобы придать движение транспортному средству 510 путем установки области режима привода ГТС в области высокой нагрузки или области высокой скорости транспортного средства, как показано на фиг. 31. В области отрицательной нагрузки транспортного средства, устанавливается область режима ЭТС с одним электрическим двигателем, при этом вторая вращающаяся электрическая машина MG2 регенерирует электрическую энергию в режиме привода ЭТС. В режиме ЭТС с одним электрическим двигателем, первая вращающаяся электрическая машина MG1 отключается от двигателя 512 (то есть передача мощности между первой вращающейся электрической машиной MG1 и двигателем 512 прерывается), при этом область со стороны высокой скорости транспортного средства в режиме ЭТС с одним электрическим двигателем может расшириться в сторону более высокой скорости транспортного средства, чем в режиме ЭТС с двумя электрическими двигателями, как показано на фиг. 31. В установленной таким образом карте изменения режима привода в режиме РЗ, например, когда скорость V транспортного средства возрастает, скорости вращения элементов, например, вращающихся электрических машин MG1, MG2 и планетарных зубчатых механизмов 548, 550, возрастают, при этом режим управления переключается в режим привода ГТС, как установлено в карте изменения режима привода в режиме ПЗ, при этом скорости вращения элементов падают в пределах ограничений. Регенерация в области отрицательной нагрузки транспортного средства может выполняться в режиме ЭТС с двумя электрическими двигателями вместо режима ЭТС с одним электрическим двигателем. Верхний предел может быть установлен для приводного крутящего момента или скорости V транспортного средства, а потребление топлива может урезаться отсутствием запуска двигателя 512.
[0227] Блок 582 гибридного управления определяет, какой режим привода должен устанавливаться путем применения скорости V транспортного средства и нагрузки транспортного средства (например, требуемого приводного крутящего момента) к карте изменения режима привода, как показано на фиг. 30 или фиг. 31. Когда этот определенный режим привода является текущим режимом привода, блок 582 гибридного управления поддерживает текущий режим привода. Когда этот определенный режим привода отличен от текущего режима привода, блок 582 гибридного управления устанавливает этот определенный режим привода вместо текущего режима привода.
[0228] Когда установлен режим ЭТС с одним электрическим двигателем, блок 582 гибридного управления включает режим привода ЭТС, использующий только вторую вращающуюся электрическую машину MG2 в качестве источника движущей силы, чтобы придать движение транспортному средству 510. Когда установлен режим ЭТС с двумя электрическими двигателями, блок 582 гибридного управления включает режим привода ЭТС использующий и первую вращающуюся электрическую машину MG1, и вторую вращающуюся электрическую машину MG2 в качестве источника движущей силы, чтобы придать движение транспортному средству 510.
[0229] Когда установлен режим ПОВ/П для ГТС или режим ПОН/П для ГТС, блок 582 гибридного управления включает привод от двигателя, в котором прямой крутящий момент двигателя передается с первым водилом СА1 путем создания противодействующей силы против мощности двигателя 512 посредством генерирования мощности первой вращающейся электрической машины MG1, и крутящий момент передается на ведущие колеса 516 путем приведения в действие второй вращающейся электрической машины MG2 электрической энергией, генерируемой первой вращающейся электрической машиной MG1. В режиме ПОВ/П для ГТС или режиме ПОН/П для ГТС, блок 582 гибридного управления управляет двигателем 512 в рабочей точке двигателя (то есть рабочей точке двигателя, выраженной оборотами Ne двигателя и крутящим моментом Те двигателя) с учетом известной оптимальной линии потребления топлива двигателя 512. В режиме ПОВ/П для ГТС или режиме ПОН/П для ГТС, также можно приводить в действие вторую вращающуюся электрическую машину MG2 с помощью электрической энергии аккумуляторного блока 520 в дополнение к электрической энергии, генерируемой первой вращающейся электрической машиной MG1.
[0230] Когда установлен режим фиксированной передачи с прямым соединением, блок 582 гибридного управления включает привод от двигателя, когда транспортное средство 510 движется, путем прямой подачи мощности двигателя 512 от первого водила СА1. В режиме фиксированной передачи с прямым соединением, блок 582 гибридного управления может заставить транспортное средство 510 двигаться путем прямой подачи мощности первой вращающейся электрической машины MG1 от первого водила СА1 путем приведения в действие первой вращающейся электрической машины MG1 с помощью электрической энергии аккумуляторного блока 520 в дополнение к мощности двигателя 512 или передачи мощности второй вращающейся электрической машины MG2 на ведущие колеса 516 путем приведения в действие второй вращающейся электрической машины MG2 с помощью электрической энергии аккумуляторного блока 520.
[0231] Во время остановки транспортного средства 510, когда емкость аккумулятора СЗ ниже или равна заданной емкости, при которой определяется, что требуется зарядка, блок 582 гибридного управления устанавливает режим фиксированной передачи на выходном валу. Когда режим фиксированной передачи на выходном валу установлен, блок 582 гибридного управления создает противодействующую силу против мощности двигателя 512 посредством генерирования мощности первой вращающейся электрической машиной MG1 и заряжает аккумуляторный блок 520 электрической энергией, генерируемой первой вращающейся электрической машиной MG1 через блок 518 управления мощностью.
[0232] Как описано выше, в режиме ЭТС с одним электрическим двигателем двигатель 512 переходит в состояние совместного вращения путем включения сцепления С1, сцепления CR или тормоза В1, и в этом состоянии можно увеличить обороты Ne двигателя с использованием первой вращающейся электрической машины MG1. Таким образом, когда двигатель 512 запускается в режиме ЭТС с одним электрическим двигателем, электронный блок 580 управления устанавливает сцепление С1, сцепление CR или тормоз В1 во включенное состояние, и в этом состоянии воспламеняет топливо, одновременно увеличивая обороты Ne двигателя с использованием первой вращающейся электрической машины MG1, при необходимости.
[0233] На фиг. 32 представлена схема, которая иллюстрирует пример случая, в котором обороты Ne двигателя увеличиваются для запуска двигателя 512 путем генерирования крутящего момента Tg машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено в режиме ЭТС с одним электрическим двигателем со ссылкой на номограмму, идентичную номограммам на фиг. 20-27. На фиг. 32 при таком запуске двигателя крутящий момент Ted, соответствующий отрицательному крутящему моменту Те двигателя 512 (именуемому также втягивающим крутящим моментом двигателя), возникающий из-за возрастания оборотов неработающего двигателя 512 в качестве противодействующей силы для увеличения оборотов Ne двигателя, передается с первым водилом СА1 («ВЫХОД»), соединенным с ведущими колесами 516, при этом возникает падение приводного крутящего момента. Напротив, толчок во время запуска двигателя уменьшается, при выдаче крутящего момента Tmadd, который компенсирует падение приводного крутящего момента (именуемого также компенсирующим крутящим моментом) с использованием второй вращающейся электрической машины MG2. То есть при таком запуске двигателя электронный блок 580 управления дополнительно заставляет вторую вращающуюся электрическую машину MG2 выдавать компенсирующий крутящий момент Tmadd в качестве противодействующей силы блокирующей крутящий момент. Состояние, показанное на фиг. 32, происходит во время переходного процесса запуска двигателя, то есть когда обороты Ne двигателя возрастают. Во время режима привода ЭТС вращение каждого из вращающихся элементов первого планетарного зубчатого механизма 550, которые вращаются как одно целое в результате включения сцепления С1 и обозначены штриховой линией, устанавливается на ноль. Когда двигатель вынужден работать в качестве тормоза, обороты Ne двигателя увеличивается как в случае состояния, показанного на фиг. 32.
[0234] Однако, поскольку компенсирующий крутящий момент Tmadd равен величине возрастания для крутящего момента второй вращающейся электрической машины MG2, то, если двигатель 512 запускается в состоянии, когда вторая вращающаяся электрическая машина MG2 уже выдала большой крутящий момент Tm машины MG2, имеется вероятность того, что нельзя обеспечить требуемый компенсирующий крутящий момент Tmadd. При этом имеется озабоченность, что вторая вращающаяся электрическая машина MG2 не может в достаточной степени компенсировать падение приводного крутящего момента и, в результате, невозможно уменьшить толчок во время запуска двигателя.
[0235] Когда двигатель 512 запускается в режиме ЭТС с одним электрическим двигателем, электронный блок 580 управления переводит сцепление CR из сцепленного состояния в расцепленное состояние в ситуации, когда сцепление С1 находится в состоянии зацеплено. В дополнение к включенному состоянию сцепления С1, когда допустимая величина крутящего момента (далее именуемого CR крутящим моментом Tcr) генерируется в сцеплении CR, состояние переключается в состояние режима фиксированной передачи с прямым соединением, где сцепление С1 и сцепление CR оба включены (см. фиг. 26), при этом можно увеличить обороты Ne двигателя без генерирования крутящего момента Tg машины MG1. Запуск двигателя путем генерирования CR крутящего момента Tcr в сцеплении CR может заставить компенсирующий крутящий момент Tmadd уменьшиться по сравнению с запуском двигателя путем генерирования крутящего момента Tg машины MG1. Таким образом, когда двигатель 512 запускается, можно легко компенсировать падение приводного крутящего момента. Далее, тот факт, что запуск двигателя путем генерирования CR крутящего момента Tcr в сцеплении CR способен дополнительно уменьшить компенсирующий крутящий момент Tmadd, будет описан подробно.
[0236] На фиг. 32 отношение пробелов между смежными линиями среди вертикальных линий Y1 - Y4 равно 1: λ: λ как показано на чертеже. Каждая «λ» во втором члене уравнения и третьем члене уравнения вычисляется на основе передаточного числа (= Число зубьев солнечной шестерни/Число зубьев кольцевой шестерни) каждого планетарного зубчатого механизма 548, 550, и не всегда является одной и той же величиной. В настоящем варианте осуществления каждая «λ» во втором члене уравнения и третьем члене уравнения принимается за одинаковую величину для удобства. При запуске двигателя, как показано на фиг. 32, поскольку сцепление С1 находится в состоянии сцеплено, вращающиеся элементы первого планетарного зубчатого механизма 550, обозначенные штриховой линией, вращаются как одно целое. В этом состоянии, когда отрицательный крутящий момент Tg выдается из первой вращающейся электрической машины MG1, вращение двигателя 512, соединенного со второй солнечной шестерней S2 первого планетарного зубчатого механизма 550, увеличивается. При запуске двигателя крутящий момент Ted, передаваемый первым водилом СА1 («ВЫХОД») равен [(1 + 2×λ)/(1 + λ)×Те]. По этой причине компенсирующий крутящий момент Tmadd, который компенсирует падение приводного крутящего момента в первом водиле СА1 («ВЫХОД»), равен [-(1 + 2×λ)/(1 + λ)×Те]. Таким образом, компенсирующий крутящий момент Tmadd больше, чем абсолютная величина втягивающего крутящего момента Те двигателя. Это происходит благодаря той же причине, что и в явлении, когда прямой крутящий момент двигателя в режиме ПОН/П для ГТс (движение вперед) увеличивается по сравнению с крутящим моментом Те двигателя, как описано выше. Здесь при вычислениях значения инерции опущены.
[0237] На фиг. 33 представлена схема, которая иллюстрирует пример случая, когда обороты Ne двигателя увеличиваются для запуска двигателя 512 путем приведения сцепления CR из расцепленного состояния к сцепленному состоянию в состоянии, когда сцепление С1 сцеплено в режиме ЭТС с одним электрическим двигателем со ссылкой на такую же номограмму, что на фиг. 32. При запуске двигателя, как также показано на фиг. 33, поскольку сцепление С1 находится в состоянии сцеплено, вращающиеся элементы первого планетарного зубчатого механизма 550, обозначенные штриховой линией, вращаются как одно целое. В этом состоянии при запуске двигателя, как показано на фиг. 33, вращение двигателя 512, соединенного со второй солнечной шестерней S2 первого планетарного зубчатого механизма 550, увеличивается путем генерирования CR крутящего момента Tcr в сцеплении CR в результате перевода сцепления CR из расцепленного состояния в сцепленное состояние. При запуске двигателя сцепление CR находится в состоянии проскальзывания; однако CR крутящий момент Tcr генерируется для увеличения оборотов Ne двигателя, при этом крутящий момент Ted, передаваемый с первым водилом СА1 («ВЫХОД»), становится втягивающим крутящим моментом Те двигателя. По этой причине компенсирующий крутящий момент Tmadd, который компенсирует падение приводного крутящего момента в первом водиле СА1 («ВЫХОД»), равен [-Те]. Таким образом, компенсирующий крутящий момент Tmadd имеет такую же величину, что и абсолютная величина втягивающего крутящего момента Те двигателя. Поэтому запуск двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние способен дополнительно уменьшить компенсирующий крутящий момент Tmadd по сравнению с запуском двигателя путем генерирования крутящего момента Tg машины MG1. Здесь при вычислениях значения инерции опущены.
[0238] Даже когда компенсирующий крутящий момент Tmadd уменьшается посредством запуска двигателя путем генерирования крутящего момента Tcr на сцеплении CR, имеется вероятность того, что нельзя обеспечить компенсирующий крутящий момент Tmadd, который требуется для второй вращающейся электрической машины MG2. При запуске двигателя, поскольку крутящий момент Tg машины MG1 (отрицательный крутящий момент) не используется, крутящий момент Tg машины MG1 (положительный крутящий момент) может быть использован для создания компенсирующего крутящего момента Tmadd. Когда электронный блок 580 управления запускает двигатель 512 в режиме ЭТС с одним электрическим двигателем, электронный блок 580 управления переводит сцепление CR из расцепленного состояния в сцепленное состояние в состоянии, в котором сцепление С1 сцеплено, и заставляет первую вращающуюся электрическую машину MG1 выдавать компенсирующий крутящий момент Tmadd. Таким образом, второй вращающейся электрической машине MG2 не нужно оставлять компенсирующий крутящий момент Tmadd без использования для режима привода ЭТС, поскольку первая вращающаяся электрическая машина MG1 способна выдавать компенсирующий крутящий момент Tmadd, при этом область, в которой режим привода ЭТС выполняется с использованием второй вращающейся электрической машины MG2 (то есть область режима ЭТ с одним электрическим двигателем), расширяется.
[0239] На фиг. 34 представлена схема, которая иллюстрирует пример случая, когда первая вращающаяся электрическая машина MG1 должна выдавать компенсирующий крутящий момент Tmadd в то время, когда двигатель 512 запускается путем приведения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 сцеплено в режиме ЭТС с одним электрическим двигателем со ссылкой на такую же номограмму, что и на фиг. 33. На фиг. 35 представлена диаграмма, которая иллюстрирует крутящий момент Tcr на сцеплении CR, требуемый для генерирования в сцеплении CR (далее требуемый крутящий момент Tcm на сцеплении CR) в случае, когда первая вращающаяся электрическая машина MG1 выдает компенсирующий крутящий момент Tmadd.
[0240] На фиг. 34 при запуске двигателя путем генерирования CR крутящего момента Tcr на сцеплении CR, компенсирующий крутящий момент Tmadd генерируется путем использования крутящего момента Tg машины MG1 (положительного крутящего момента). Крутящий момент Tg машины MG1 (положительный крутящий момент) усиливает крутящий момент (этот крутящий момент обозначен как Tgd), который компенсирует падение приводного крутящего момента с помощью первого водила СА1 («ВЫХОД»). С другой стороны, крутящий момент Tg машины MG1 (положительный крутящий момент) добавляет крутящий момент (этот крутящий момент обозначен как Tgdd) в направлении снижения оборотов Ne двигателя, в первом планетарном зубчатом механизме 550, который вращается как одно целое в результате включения сцепления С1, и который обозначен штриховой линией. Поэтому крутящий момент, который воздействует на первое водило СА1 («ВЫХОД»), в то время, когда генерируется крутящий момент Tcr на сцеплении CR для увеличения оборотов Ne двигателя, равен [Tgd - |Те + Tgdd|]. Когда считается, что состояние, где крутящий момент Tcr на сцеплении CR генерируется в дополнение к сцепленному состоянию сцепления С1, эквивалентно состоянию режима фиксированной передачи с прямым соединением (см. фиг. 26), в котором и сцепление С1 и сцепление CR включены, крутящий момент Tg машины MG1 (положительный крутящий момент) равен [Tgd - |Tgdd|]. По этой причине крутящий момент, который воздействует на первое водило СА1 («ВЫХОД»), равен [Tg - |Те|]. Таким образом, когда первая вращающаяся электрическая машина MG1 выдает, по меньшей мере, крутящий момент, соответствующий абсолютной величине втягивающего крутящего момента Те двигателя, в качестве крутящего момента Tg машины MG1 (положительного крутящего момента), можно компенсировать падение приводного крутящего момента. Здесь при вычислениях значения инерции опущены.
[0241] В качестве условия, что можно увеличить обороты Ne двигателя путем генерирования крутящего момента Tcr на сцеплении CR, по меньшей мере, крутящий момент Tcr на сцеплении CR, соответствующий крутящему моменту Tgdd, который добавляется к первому планетарному зубчатому механизму 550 с использованием крутящего момента Tg машины MG1 (положительный крутящий момент), требуется в дополнение к втягивающему крутящему моменту Те двигателя. Таким образом, требуемый крутящий момент Tcm на сцеплении CR представляет собой крутящий момент, который превышает [|Те + Tgdd|]. Крутящий момент Tgdd равен [(1 + λ)/λ×Tg], при этом требуемый крутящий момент Tcrn на сцеплении CR, с помощью которого обороты Ne двигателя увеличиваются, представляет собой крутящий момент, который превышает крутящий момент [= |Те + (1 + λ)/λ ×Tg|)] как обозначено сплошной линией на фиг. 35. Здесь при вычислениях значения инерции опущены.
[0242] Как описано со ссылкой на фиг. 34 и фиг. 35, даже когда вторая вращающаяся электрическая машина MG2 не выдает часть компенсирующего крутящего момента Tmadd, однако когда первая вращающаяся электрическая машина MG1 выдает крутящий момент, соответствующий абсолютной величине втягивающего крутящего момента Те двигателя, можно обеспечить компенсирующий крутящий момент Tmadd. Поэтому область режима ЭТС с одним электрическим двигателем может устанавливаться на основе максимального крутящего момента второй вращающейся электрической машины MG2, при этом можно расширить область режима привода ЭТС за пределы области режима ЭТС с одним электрическим двигателем, который устанавливается на основе крутящего момента, полученного путем вычитания компенсирующего крутящего момента Tmadd из максимального крутящего момента второй вращающейся электрической машины MG2.
[0243] Когда крутящий момент Tg машины MG1 (положительный крутящий момент) возрастает, требуемый крутящий момент Tcm на сцеплении CR также увеличивается. Кроме того, при запуске двигателя путем генерирования крутящего момента Tcr на сцеплении CR, сцепление CR находится в состоянии проскальзывания, при этом имеется вероятность того, что возникнут тепловые проблемы. По этой причине желательно установить верхнюю предельную величину крутящего момента Tg машины MG1 (положительный крутящий момент) с учетом возможного значения в качестве крутящего момента Tcr на сцеплении CR.
[0244] Когда первая вращающаяся электрическая машина MG1 выдает крутящий момент Tg машины MG1 (положительный крутящий момент), который превышает компенсирующий крутящий момент Tmadd, можно произвести ускорение, одновременно запуская двигатель, путем увеличения приводного крутящего момента.
[0245] Чтобы реализовать вышеописанное управление запуском двигателя, электронный блок 580 управления дополнительно включает в себя средство определения условия, то есть блок 586 определения условия, средство запуска управления, то есть блок 588 запуска управления, и средство управления компенсацией крутящего момента, то есть блок 589 управления компенсацией крутящего момента.
[0246] Когда при запуске двигателя путем генерирования крутящего момента Tg машины MG1 (отрицательного крутящего момента) (см. фиг. 32), блок 586 определения условия определяет, способна ли вторая вращающаяся электрическая машина MG2 выдать требуемый компенсирующий крутящий момент Tmadd. Например, блок 586 определения условия определяет, действительно ли крутящий момент, полученный путем вычитания крутящего момента Tm машины MG2, который соответствует требуемому приводному крутящему моменту и который в текущий момент выдается из второй вращающейся электрической машины MG2 из крутящего момента Tm машины MG2, который в текущий момент может быть выдан из второй вращающейся электрической машины MG2, недостаточен для компенсации крутящего момента Tmadd во время режима привода ЭТС в режиме ЭТС с одним электрическим двигателем. Компенсирующий крутящий момент Tmadd равен [-(1 + 2×λ/(1 + λ)×Те], как описано выше. Втягивающий крутящий момент Те двигателя вычисляется, например, на основе увеличения ускорения скорости вращения во время запуска двигателя, на основе требований очистки выхлопных газов и пр.
[0247] Во время запуска двигателя 512, когда блок 586 определения условия определяет, что компенсирующий крутящий момент Tmadd при запуске двигателя путем генерирования крутящего момента Tg машины MG1 (отрицательный крутящий момент) не является достаточным, блок 588 запуска управления, например, запускает двигатель 512, заставляя первую вращающуюся электрическую машину MG1 выдавать крутящий момент Tg машины MG1 (отрицательный крутящий момент) в состоянии, когда сцепление С1 сцеплено, и заставляя воспламеняться топливо, увеличивая при этом обороты Ne двигателя (см. фиг. 32).
[0248] Во время запуска двигателя 512, когда блок 586 определения условия определяет, что компенсирующий крутящий момент Tmadd при запуске двигателя путем генерирования крутящего момента Tg машины MG1 (отрицательного крутящего момента) не является достаточным, блок 588 запуска управления запускает двигатель 512 путем приведения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, в котором сцепление С1 сцеплено, и заставляя воспламеняться топливо, увеличивая при этом обороты Ne двигателя (см. фиг. 33).
[0249] При запуске двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние, любая первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 способна генерировать компенсирующий крутящий момент Tmadd. То есть когда двигатель 512 запускается, блок 589 управления компенсацией крутящего момента способен выдавать крутящий момент из каждой машины - первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2, при этом падение приводного крутящего момента уменьшается. При компенсации падения приводного крутящего момента с использованием второй вращающейся электрической машины MG2, компенсирующий крутящий момент Tmadd может воздействовать непосредственно на ведущие колеса 516, при этом относительно легко управлять величиной компенсирующего крутящего момента Tmadd. С другой стороны, при компенсации падения приводного крутящего момента с использованием первой вращающейся электрической машины MG1, противодействующий крутящий момент, обеспечиваемый сцеплением CR, переходящего из расцепленного состояния к сцепленному состоянию в состоянии проскальзывания, при этом относительно трудно управлять величиной компенсирующего крутящего момента Tmadd, который воздействует на ведущие колеса 516. По этой причине блок 589 управления компенсацией крутящего момента заставляет первую вращающуюся электрическую машину MG1 выдавать крутящий момент, на величину которого крутящий момент Tm машины MG2 недостаточен для крутящего момента для уменьшения падения приводного крутящего момента, при этом компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, выдается, отдавая предпочтение компенсирующему крутящему моменту Tmadd, который генерируется первой вращающейся электрической машиной MG1.
[0250] Более конкретно, при запуске двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние, компенсирующий крутящий момент Tmadd равен [-Те], при этом можно уменьшить компенсирующий крутящий момент Tmadd по сравнению с запуском двигателя путем генерирования крутящего момента Tg машиной MG1 (отрицательный крутящий момент). Однако когда крутящий момент Tm машины MG2, который в текущий момент выдается из второй вращающейся электрической машины MG2 является большим из-за большого требуемого приводного крутящего момента, вторая вращающаяся электрическая машина ЭГ2 не способна обеспечить уменьшенный компенсирующий крутящий момент Tmadd. В этом случае первой вращающейся электрической машине MG1 нужно выдавать недостающую величину компенсирующего крутящего момента Tmadd, выдавая крутящий момент Tg машины MG1 (положительный крутящий момент). По этой причине блок 586 определения условия определяет, действительно ли крутящий момент, полученный путем вычитания крутящего момента Tm машины MG2, который соответствует требуемому приводному крутящему моменту и который в текущий момент выдается из второй вращающейся электрической машины MG2, из крутящего момента Tm машины MG2, который в текущий момент может быть выдан из второй вращающейся электрической машины MG2, недостаточен для компенсации крутящего момента Tmadd (= -Те). То есть блок 586 определения условия определяет, действительно ли MG1 способствует тому, что первая вращающаяся электрическая машина MG1 выдает требуемый крутящий момент Tg машины MG1 (положительный крутящий момент).
[0251] Во время запуска двигателя 512, когда блок 586 определения условия определяет, что участие MG1 не является требуемым, блок 589 управления компенсацией крутящего момента не выполняет участие MG1, и заставляет только вторую вращающуюся электрическую машину MG2 дополнительно выдавать компенсирующий крутящий момент Tmadd. С другой стороны, во время запуска двигателя 512, когда блок 586 определения условия определяет, что требуется участие MG1, блок 589 управления компенсацией крутящего момента выполняет участие MG1. При участии MG1 блок 589 управления компенсацией крутящего момента выдает крутящий момент Tg машины MG1 (положительный крутящий момент) из первой вращающейся электрической машины MG1, при этом падение приводного крутящего момента уменьшается. Крутящий момент Tg машины MG1 (положительный крутящий момент) представляет собой крутящий момент, на величину которого крутящий момент Tm MG2 недостаточен для компенсации крутящего момента Tmadd (= -Те). Когда вторая вращающаяся электрическая машина MG2 не способна выдавать часть компенсирующего крутящего момента Tmadd или когда используется вариант осуществления, в котором вторая вращающаяся электрическая машина MG2 изначально не выдает компенсирующий крутящий момент Tmadd, блок 589 управления компенсацией крутящего момента выдает крутящий момент Tg машины MG1 (положительный крутящий момент) из первой вращающейся электрической машины MG1, при этом падение приводного крутящего момента уменьшается с использованием только первой вращающейся электрической машины MG1.
[0252] Когда нагрузка транспортного средства (например, требуемый приводной крутящий момент) уменьшается, крутящий момент Tm машины MG2, который используется для приведения в движение транспортного средства 510, уменьшается, при этом запас крутящего момента Tm машины MG2, который может использоваться для компенсирующего крутящего момента Tmadd, относительно возрастает. Как описано выше, желательно использовать крутящий момент Tm машины MG2 для компенсирующего крутящего момента Tmadd, отдавая предпочтение перед крутящим моментом Tg машины MG1 (положительный крутящий момент). Поэтому блок 589 управления компенсацией крутящего момента уменьшает крутящий момент Tg машины MG1 (положительный крутящий момент), который выдается из первой вращающейся электрической машины MG1, когда нагрузка транспортного средства уменьшается.
[0253] Компенсирующий крутящий момент Tmadd, который генерируется первой вращающейся электрической машиной MG1, действует в направлении снижения скорости вращения второй кольцевой шестерни R2 (то есть вращающихся элементов первого дифференциала 546, которые вращаются как одно целое из-за включенного сцепления С1), соединенной с первой кольцевой шестерней R1 (то есть действует в качестве противодействующего крутящего момента на сцеплении CR из расцепленного состояния в сцепленное состояние). По этой причине блок 589 управления компенсацией крутящего момента устанавливает крутящий момент Tg машины MG1 (положительный крутящий момент), который выдается из первой вращающейся электрической машины MG1 на заданную величину или меньшую. Заданная величина устанавливается на основе крутящего момента Tcr на сцеплении CR, который может генерироваться на основе, например, тепловой нагрузки и пр., и крутящего момента [= |Те + (1 + λ)/λ×Tg|)], обозначенного сплошной линией на фиг. 35.
[0254] При запуске двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние, изменения оборотов Ne двигателя имеют тенденцию к флуктуации по отношению к целевой величине, при этом имеется вероятность того, что пострадает стабильность сгорания в двигателе 512. Обороты Ne двигателя подвергаются управлению с обратной связью с использованием крутящего момента Tg машины MG1, временная константа которого меньше, чем в сцеплении CR гидравлическое давление Pcr для управления сцеплением CR. То есть когда двигатель 512 запускается, блок 589 управления компенсацией крутящего момента выдает крутящий момент Tg машины MG1 из первой вращающейся электрической машины MG1 во время управления с обратной связью, при этом обороты Ne двигателя находятся вблизи целевого значения.
[0255] Когда температура THoil рабочего масла для управления сцеплением CR низка, имеется вероятность того, что скорость срабатывания (что является синонимом управляемости) сцепления CR уменьшается благодаря высокой вязкости рабочего масла. Когда температура THoil рабочего масла высока, имеется вероятность того, что скорость срабатывания сцепления CR уменьшится из-за утечки рабочего масла из зазоров и пр., клапанов (соленоидного клапана, клапан регулировки давления и пр., расположенных в гидравлическом контуре 554 управления), связанных с подачей гидравлического давления на сцепление CR. Когда скорость срабатывания сцепления CR низка, реакция запуска двигателя может упасть. В таком случае, хотя компенсирующий крутящий момент Tmadd является недостаточным, более предпочтительно запускать двигатель путем генерирования крутящего момента Tg машины MG1 (отрицательный крутящий момент), чем запускать двигатель путем приведения сцепления CR из расцепленного состояния в сцепленное состояние. То есть даже когда невозможно уменьшить падение приводного крутящего момента, обеспечению приемистости запуска двигателя придается более высокий приоритет.
[0256] Более конкретно, во время запуска двигателя 512, когда блок 586 определения условия определяет, что компенсирующий крутящий момент Tmadd при запуске двигателя путем генерирования крутящего момента Tg машины MG1 (отрицательный крутящий момент) не является достаточным, блок 586 определения условия определяет, что скорость срабатывания (управляемость) во время управления сцеплением CR высока или низка на основе температуры THoil рабочего масла для управления сцеплением CR. Блок 586 определения условия определяет, действительно ли скорость срабатывания во время управления сцеплением CR высока или низка на основе того, является ли температура THoil рабочего масла выше заданной температуры масла. Заданная температура масла имеющая, например, пороговое значение, определяется заранее для определения того, что вязкость рабочего масла низка до такой степени, что обеспечивается скорость срабатывания сцепления CR. Другими словами, блок 586 определения условия определяет, действительно ли скорость срабатывания во время управления сцеплением CR высока или низка на основе того, меньше ли температура THoil рабочего масла второй заданной температуры масла. Вторая заданная температура масла является, например, величиной, которая выше, чем заданная температура масла и представляет собой порог, определяемый заранее для определения того, что утечка рабочего масла из клапанов уменьшается до такой степени, что обеспечивается скорость срабатывания сцепления CR.
[0257] Когда блок 586 определения условия определяет, что скорость срабатывания для срабатывания сцепления CR высока, блок 588 запуска управления выполняет управление запуском двигателя (именуемое также запуском двигателя с включением сцепления CR) для срабатывания сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 сцеплено. С другой стороны, когда блок 586 определения условия определяет, что скорость срабатывания во время срабатывания сцепления CR низка, блок 588 запуска управления выполняет управление запуском двигателя (именуемое также обычным запуском двигателя) для увеличения оборотов Ne двигателя с использованием первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 сцеплено, а сцепление CR находится в состоянии расцеплено.
[0258] На фиг. 36 представлена блок-схему, которая иллюстрирует соответствующий участок операций управления электронного блока 580 управления, то есть операции управления для беспрепятственной компенсации падения приводного крутящего момента во время запуска двигателя 512. Эта блок-схема выполняется, например, тогда, когда это определяется для запуска двигателя во время режима привода ЭТС. На фиг. 37 представлена схема, на которой показан пример временной диаграммы в случае, когда выполняются операции управления, показанные на блок-схеме на фиг. 36.
[0259] На фиг. 36 сначала, на этапе (далее этап опущен) S10, соответствующем функции блока 586 определения условия, определяется, действительно ли компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, является недостаточным в случае, когда выполняется обычный запуск двигателя. Когда делается утвердительное определение на S10, определяется на S20, соответствующем функции блока 586 определения условия, действительно ли обеспечение приемистости для управления сцеплением CR высокое на основе того, выше ли температура THoil рабочего масла, чем заданная температура масла. Например, действительно ли обеспечение приемистости для управления сцеплением CR высокое может быть определено на основе того, ниже ли температура THoil рабочего масла, чем вторая заданная температура масла (> заданной температуры масла). Когда делается утвердительное определение на S20, запуск двигателя с включением сцепления CR выбирается на S30, соответствующем функции блока 588 запуска управления. Далее, на S40, соответствующем функции блока 586 определения условия, определяется, действительно ли участие MG1 является требуемым. Когда делается утвердительное определение на S40, выполнение с участием MG1 (то есть с помощью MG1) выбирается на S50, соответствующем функции блока 589 управления компенсацией крутящего момента. Вслед за S50 двигатель 512 запускается путем приведения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, в котором сцепление С1 сцеплено, и воспламеняется топливо, увеличивая при этом обороты Ne двигателя (см. фиг. 33). При запуске двигателя компенсирующий крутящий момент Tmadd выдается из первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2. Крутящий момент Tg машины MG1 (положительный крутящий момент) выдается с участием машины MG1, как крутящий момент, на величину которого крутящий момент Tm машины MG2 является недостаточным для требуемого компенсирующего крутящего момента Tmadd (см. фиг. 34). С другой стороны, когда делается отрицательное определение на S40, отказ от участия MG1 (то есть отсутствие участия MG1) выбирается на S60, соответствующем функции блока 589 управления компенсацией крутящего момента. Вслед за S60, двигатель 512 запускается путем приведения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 сцеплено, и воспламеняется топливо, увеличивая при этом обороты Ne двигателя (см. фиг. 33). При запуске двигателя компенсирующий крутящий момент Tmadd выдается только из второй вращающейся электрической машины MG2. С другой стороны, когда делается отрицательное определение на S10, или когда делается отрицательное определение на S20, обычный запуск двигателя выбирается на S70, соответствующем функции блока 588 запуска управления. Вслед за S70 двигатель 512 запускается, с выдачей крутящего момента Tg машины MG1 (отрицательный крутящий момент) из первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 сцеплено, и воспламеняется топливо, увеличивая при этом обороты Ne двигателя (см. фиг. 32).
[0260] На фиг. 37 показан случай, когда осуществляется запуск двигателя с включением сцепления CR из состояния, где транспортное средство 510 выполняет режим привода ЭТС при постоянной величине хода педали акселератора. На фиг. 37 во время режима привода ЭТС, где работа двигателя 512 остановлена в состоянии, при режиме ЭТС с одним электрическим двигателем, в котором сцепление С1 сцеплено (см. дополнительное использование двигателя в качестве тормоза на фиг. 19) или установлен режим ПОН/П для ГТС (движение вперед), величина θасс хода педали акселератора начинает возрастать (см. момент t1 времени). Соответственно, требуемый приводной крутящий момент возрастает, при этом, крутящий момент Tm машины MG2 также возрастает, положительная электрическая энергия (то есть электрическая энергия разрядки аккумулятора) из электрической энергии (именуемая также аккумуляторной электрической энергией) аккумуляторного блока 520 также пропорционально возрастает (см. момент t1 времени - момент t4 времени). После чего, в результате того факта, что величина хода θасс педали акселератора возросла, делается определение на запуск двигателя (см. момент t3 времени). Таким образом, CR крутящий момент Tcr генерируется в сцеплении CR. Командная величина гидравлического давления для подачи сцеплению CR гидравлического давления Pcr может выдаваться от момента времени, в который делается определение на запуск двигателя или, чтобы улучшить приемистость для включения сцепления CR, как показано в примере с фиг. 37, можно спрогнозировать запуск двигателя и затем запустить подготовку генерирования крутящего момента Tcr сцепления CR от момента времени, в который прогнозируется запуск двигателя. Например, порог, при котором прогнозируется запуск двигателя, устанавливается на величину хода θасс педали акселератора, которая ниже порога, при котором делается определение на запуск двигателя. Момент t2 времени обозначает, что подготовка генерирования крутящего момента Tcr сцепления CR запускается, поскольку величина хода θасс педали акселератора достигла порога, при котором прогнозируется запуск двигателя. При подготовке генерирования крутящего момента Tcr сцепления CR, сначала, временное высокое гидравлическое давление для смещения клапана регулировки давления, который подает гидравлическое давление Pcr для сцепления CR, выдается в качестве командной величины гидравлического давления гидравлического давления Pcr сцепления CR, и после чего выдается постоянное давление холостого хода для смещения поршня сцепления CR (см. момент t2 времени - момент t3 времени). Постоянное давление холостого хода не является таковым для смещения поршня до выполнения так называемого уплотнения для выполнения уплотнения зазора между фрикционными материалами сцепления CR. В примере на фиг. 37 после прогнозирования запуска двигателя величина хода θасс педали акселератора возросла, при этом делается определение на запуск двигателя, и командная величина гидравлического давления для гидравлического давления Pcr сцепления CR для генерирования крутящего момента Tcr на сцеплении CR начинает выдаваться (см. момент t3 времени). При выдаче командной величины гидравлического давления сначала выдается временное высокое гидравлическое давление для уплотнения сцепления CR, и после чего выдается постоянное давление холостого хода (см. момент t3 времени - момент t6 времени). Когда крутящий момент Tcr сцепления CR фактически начинает генерироваться в результате выдачи командной величины гидравлического давления для гидравлического давления Pcr сцепления CR для генерирования крутящего момента Tcr сцепления CR, обороты Ne двигателя начинают возрастать (см. момент t5 времени). При обнаружении возрастания оборотов Ne двигателя крутящий момент Tm машины MG2 увеличивается, и крутящий момент Tg машны MG1 (положительный крутящий момент) выдается для выдачи компенсирующего крутящего момента Tmadd (см. момент t5 времени - момент t6 времени). Поскольку каждая из вращающихся электрических машин MG1, MG2 включает в себя синусо-косинусный вращающийся трансформатор, начало возрастания оборотов Ne двигателя может быть с точностью определено на основе скорости Ng вращения MG1 и скорости Nm вращения MG2. Путем использования определения начала такого возрастания оборотов Ne двигателя зависимость между крутящим моментом Tcr сцепления CR и командной величиной гидравлического давления для гидравлического давления Pcr сцепления CR для генерирования CR крутящего момента Tcr сцепления CR может быть изучена, и командная величина гидравлического давления для гидравлического давления Pcr сцепления CR, которая используется во время запуска Ne двигателя, в следующий раз может быть скорректирована. В качестве альтернативного варианта командная величина гидравлического давления для гидравлического давления Pcr сцепления CR может быть скорректирована путем использования гидравлического давления Pcr сцепления CR, определенного датчиком 574 гидравлического давления сцепления CR или хода поршня, определенного датчиком хода поршня в сцеплении CR. Когда обороты Ne двигателя начинают возрастать, управление с обратной связью выполняется с использованием первой вращающейся электрической машины MG1, при этом достигается нужная динамика возрастания оборотов двигателя. Поскольку приемистость первой вращающейся электрической машины MG1 выше, чем гидравлического давления Pcr сцепления CR, повышается отслеживаемость цели. Поскольку приводной крутящий момент колеблется в связи с флуктуациями крутящего момента Tg машины MG1 (положительный крутящий момент) при управлении с обратной связью, флуктуации снимаются крутящим моментом Tm машины MG2 (см. момент t5 времени - момент t6 времени). Когда обороты Ne двигателя достигают заданной скорости вращения, в двигателе 512 происходит зажигание (см. момент t6 времени). С возрастанием крутящего момента Те двигателя после зажигания, командная величина гидравлического давления для уменьшения гидравлического давления Pcr сцепления CR выдается при подготовке привода от двигателя в дальнейшем (см. момент t6 времени - момент t8 времени). После зажигания определяется, действительно ли двигатель 512 выполнил завершение сгорания (см. момент t7 времени), и, когда сгорание становится устойчивым, крутящий момент Те двигателя увеличивается (см. момент t8 времени и позже). Поскольку режим привода меняется на привод от двигателя, использующий мощность двигателя Ре в качестве основного источника мощности, аккумуляторная электрическая энергия, которая используется, чтобы придать движение транспортному средству 510, уменьшается (см. момент t8 времени - момент t9 времени).
[0261] Как описано выше, согласно настоящему варианту осуществления изобретения, когда двигатель 512 запускается путем генерирования крутящего момента Tg машины MG1 (отрицательный крутящий момент) в состоянии, когда сцепление С1 сцеплено, а сцепление CR расцеплено, крутящий момент, возросший выше втягивающего крутящего момента Те двигателя, механически выдается с помощью первого водила СА1, соединенного с ведущими колесами 516. Поскольку втягивающий крутящий момент Те двигателя имеет возможность воздействовать непосредственно на первое водило СА1 переключением сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 находится в состоянии сцеплено, когда двигатель 512 запускается, можно уменьшить компенсирующий крутящий момент Tmadd по сравнению с компенсирующим крутящим моментом Tmadd во время запуска двигателя с использованием первой вращающейся электрической машины MG1. Таким образом, во время запуска двигателя 512 можно легко компенсировать падение приводного крутящего момента.
[0262] Согласно настоящему варианту осуществления изобретения, когда двигатель 512 запускается путем приведения сцепления CR из расцепленного состояния в сцепленное состояние, выдается крутящий момент Tg машины ЭГ1 (положительный крутящий момент), при этом крутящий момент Tg машины ЭГ1 (отрицательный крутящий момент), который используется для запуска двигателя 512, не генерируется, однако, падение приводного крутящего момента уменьшается, при этом можно генерировать компенсирующий крутящий момент Tmadd с использованием первой вращающейся электрической машины MG1. Таким образом, например, когда весь компенсирующий крутящий момент Tmadd вырабатывается второй вращающейся электрической машиной MG2, можно расширить режим привода с помощью области электрического двигателя второй вращающейся электрической машины MG2, которая определяется заранее, при этом резервируется компенсирующий крутящий момент Tmadd.
[0263] Согласно настоящему варианту осуществления изобретения, когда двигатель 512 запускается, крутящий момент выдается из каждой первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2, при этом падение приводного крутящего момента уменьшается, притом можно генерировать компенсирующий крутящий момент Tmadd с использованием и первой вращающейся электрической машин MG1 и второй вращающейся электрической машины MG2. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0264] Согласно настоящему варианту осуществления изобретения, поскольку крутящий момент Tg машины MG1 (положительный крутящий момент) устанавливается на заданную величину или меньшую, можно достичь и возрастания оборотов Ne двигателя с использованием сцепления CR и компенсации падения приводного крутящего момента с использованием первой вращающейся электрической машины MG1.
[0265] Согласно настоящему варианту осуществления, поскольку крутящий момент Tg машины MG1 (положительный крутящий момент) уменьшается, когда нагрузка транспортного средства уменьшается, то есть запас крутящего момента Tm машины MG2 относительно возрастает, компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, увеличивается, при этом можно стабильно компенсировать падение приводного крутящего момента. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0266] Согласно настоящему варианту осуществления изобретения, поскольку крутящий момент, на величину которого крутящий момент Tm машины MG2 недостаточен для крутящего момента для уменьшения падения приводного крутящего момента, выдается из первой вращающейся электрической машины MG1, компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, выдается, отдавая предпочтение перед компенсирующим крутящим моментом Tmadd, который генерируется первой вращающейся электрической машиной MG1, при этом можно стабильно компенсировать падение приводного крутящего момента. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0267] Согласно настоящему варианту осуществления изобретения, когда двигатель 512 запускается, крутящий момент Tg машины MG1 выдается во время управления с обратной связью, при этом обороты Ne двигателя изменяются вблизи целевой величины, притом можно уменьшить колебания оборотов Ne двигателя с использованием первой вращающейся электрической машины MG1, имеющей более быструю приемистость, чем работа сцепления CR. Таким образом, легко обеспечить стабильность сгорания в двигателе 512.
[0268] Согласно настоящему варианту осуществления изобретения, когда приемистость во время управления сцеплением CR низка, выполняется управление запуском двигателя для увеличения оборотов Ne двигателя с использованием первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 сцеплено, а сцепление CR расцеплено, при этом можно обеспечить приемистость во время запуска двигателя 512.
[0269] Согласно настоящему варианту осуществления изобретения, действительно ли приемистость во время управления сцеплением CR высокая или низкая определяется на основе температуры THoil рабочего масла для управления сцеплением CR, и, когда приемистость сцепления CR низкая, приемистость во время запуска двигателя 512 обеспечивается выполнением управления запуском двигателя с использованием первой вращающейся электрической машины MG1 для обеспечения плавного запуска двигателя 512.
[0270] Согласно настоящему варианту осуществления второй дифференциал 544 включает в себя одноступенчатый планетарный зубчатый механизм, в котором первая кольцевая шестерня R1 представляет собой четвертый вращающийся элемент RE4, первая солнечная шестерня S1 представляет собой пятый вращающийся элемент RE5, а первое водило СА1 является шестым вращающимся элементом RE6, при этом, когда дифференциальный статус второго дифференциала 544 управляется в состоянии, когда сцепление С1 сцеплено, а сцепление CR расцеплено, крутящий момент, увеличившийся по сравнению с крутящим моментом Те двигателя, механически передается на первое водило СА1.
[0271] Далее будет описан седьмой вариант осуществления изобретения. В нижеследующем описании аналогичные ссылочные позиции обозначают участки, являющиеся общими для вариантов осуществления, и их описание опущено.
[0272] В вышеописанном шестом варианте осуществления запуск двигателя с включением сцепления CR выполняется тогда, когда приемистость во время управления сцеплением CR высокая; при этом обычный запуск двигателя, использующий крутящий момент Tg машины MG1 (отрицательный крутящий момент) выполняется тогда, когда приемистость во время управления сцеплением CR низкая. Поэтому, когда приемистость во время переключения сцепления CR высокая, можно уменьшить крутящий момент Tm машины MG2, который нужно зарезервировать (то есть крутящий момент Tm машины MG2, оставленный без применения в режиме привода ЭТС) для использования в качестве компенсирующего крутящего момента Tmadd во время запуска двигателя. В критическом случае в варианте осуществления изобретения, в котором компенсирующий крутящий момент Tmadd создается путем использования крутящего момента Tg машины MG1 (положительный крутящий момент), не требуется резервировать крутящий момент Tm машины MG2 для использования в качестве компенсирующего крутящего момента Tmadd. С другой стороны, когда приемистость во время управления сцеплением CR низкая, стабильность сгорания во время запуска двигателя повышается посредством обычного запуска двигателя, используя крутящий момент Tg машины MG1 (отрицательный крутящий момент), однако требуемый компенсирующий крутящий момент Tmadd возрастает. Поэтому электронный блок 580 управления сужает область режима привода ЭТС, в котором транспортное средство 510 движется путем использования второй вращающейся электрической машины MG2 в качестве источника движущей силы в состоянии, когда работа двигателя 512 остановлена в случае, когда приемистость во время управления сцеплением CR низкая по сравнению со случаем, где приемистость во время управления сцеплением CR высокая.
[0273] В частности, когда блок 586 определения условия определяет, что приемистость во время управления сцеплением CR высокая, блок 582 гибридного управления выбирает (устанавливает) первую ЭТС область в качестве области режима ЭТС с одним электрическим двигателем. С другой стороны, когда блок 586 определения условия определяет, что приемистость во время управления сцеплением CR низкая, блок 582 гибридного управления выбирает (устанавливает) вторую ЭТС область в качестве области режима ЭТС с одним электрическим двигателем. Первая ЭТС область устанавливается, при этом, например, область стороны высокой нагрузки транспортного средства является широкой (то есть требуемый приводной крутящий момент распространяется на область более высокого крутящего момента) по сравнению со второй ЭТС областью.
[0274] На фиг. 38 представлена блок-схема, которая иллюстрирует соответствующий участок операций управления электронного блока 580 управления, то есть операции управления для изменения ЭТС области на основе приемистость во время управления сцеплением CR. Блок-схема, например, периодически выполняется во время движения.
[0275] На фиг. 38 сначала на S110, соответствующем функции блока 586 определения условия, определяется, действительно ли приемистость во время управления сцеплением CR высокая на основе того, выше ли температура THoil рабочего масла, чем заданная температура масла. Например, приемистость во время управления сцеплением CR может быть определена на основе того, ниже ли температура THoil рабочего масла, чем вторая заданная температура масла (> заданной температуры масла). Когда делается утвердительное определение на S110, первая ЭТС область выбирается (устанавливается) в качестве области режима ЭТС с одним электрическим двигателем на S120, соответствующем функции блока 582 гибридного управления. С другой стороны, когда делается отрицательное определение на S110, вторая ЭТС область, которая уже, чем первая ЭТС область, выбирается (устанавливается) в качестве области режима ЭТС с одним электрическим двигателем на S130, соответствующем функции блока 582 гибридного управления.
[0276] Как описано выше, согласно настоящему варианту осуществления изобретения, область режима привода ЭТС в случае, когда приемистость во время управления сцеплением CR низкая, уже, чем область режима привода ЭТС в случае, когда приемистость во время управления сцеплением CR высокая, при этом, во время запуска двигателя 512, запас крутящего момента Tm машины MG2 имеет тенденцию к резервированию (то есть компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, имеет тенденцию к резервированию).
[0277] На фиг. 39 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства 600 согласно восьмому варианту осуществления изобретения. На фиг. 39 транспортное средство 600 представляет собой гибридное транспортное средство, включающее в себя двигатель 512, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, система 602 передачи мощности и ведущие колеса 516. Система 602 передачи мощности включает в себя первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2.
[0278] Система 602 передачи мощности расположена в контуре передачи мощности между двигателем 512 и ведущими колесами 516. Система 602 передачи мощности включает в себя первый блок 604 передачи мощности, второй блок 606 передачи мощности, ведущую шестерню 610, шестерню 538 дифференциала и пр. внутри корпуса 522. Ведущая шестерня 610 соединена с ведущим валом 608, который представляет собой выходной вращающийся элемент первого блока 604 передачи мощности. Дифференциальная кольцевая шестерня 536 находится в зацеплении с ведущей шестерней 610 через дифференциальную кольцевую шестерню 536. Система 602 передачи мощности включает в себя оси 540, соединенные с шестерней 538 дифференциала и пр.
[0279] Первый блок 604 передачи мощности расположен коаксиально с входным валом 542, который представляет собой входной вращающийся элемент первого блока 604 передачи мощности и включает в себя второй дифференциал 612, первый дифференциал 614 и сцепление CR. Второй дифференциал 612 включает в себя второй планетарный зубчатый механизм 548 (второй дифференциальный механизм) и первую вращающуюся электрическую машину MG1. Первый дифференциал 614 включает в себя первый планетарный зубчатый механизм 550 (первый дифференциальный механизм), сцепление С1 и тормоз В1.
[0280] Во втором дифференциале 612 первая солнечная шестерня S1 представляет собой четвертый вращающийся элемент RE4 в качестве входного элемента, соединенного с выходным вращающимся элементом (то есть второй солнечной шестерней S2 первого планетарного зубчатого механизма 550) первого дифференциала 614, и служит в качестве входного вращающегося элемента второго дифференциала 612. Первая кольцевая шестерня R1 соединена с валом 552 ротора первой вращающейся электрической машины MG1 и представляет собой пятый вращающийся элемент RE5, являющийся противодействующим элементом, с которым соединена первая вращающаяся электрическая машина MG1, при этом передается мощность. Первое водило СА1 соединено с ведущим валом 608 и является шестым вращающимся элементом RE6, который представляет собой выходной элемент, соединенный с ведущими колесами 516. Первое водило СА1 служит в качестве выходного вращающегося элемента второго дифференциала 612.
[0281] В первом дифференциале 614 второе водило СА2 соединено с входным валом 542 и является первым вращающимся элементом RE1, с которым двигатель 512 соединен через входной вал 542, при этом передается мощность. Второе водило СА2 служит в качестве входного вращающегося элемента первого дифференциала 614. Вторая кольцевая шестерня R2 представляет собой третий вращающийся элемент RE3, селективно соединяемый с корпусом 522 через тормоз В1. Вторая солнечная шестерня S2 представляет собой второй вращающийся элемент RE2, соединенный с входным вращающимся элементом (то есть первой солнечной шестерней S1 второго планетарного зубчатого механизма 548) второго дифференциала 612. Вторая солнечная шестерня S2 служит в качестве выходного вращающегося элемента первого дифференциала 614. Второе водило СА2 и вторая кольцевая шестерня R2 селективно соединяются друг с другом через сцепление С1. Первая кольцевая шестерня R1 и вторая кольцевая шестерня R2 селективно соединяются друг с другом через сцепление CR. Таким образом, сцепление С1 представляет собой первое устройство сцепления, которое селективно соединяет первый вращающийся элемент RE1 с третьим вращающимся элементом RE3. Сцепление CR представляет собой второе устройство сцепления, которое селективно соединяет пятый вращающийся элемент RE5 с третьим вращающимся элементом RE3. Тормоз В1 представляет собой третье устройство сцепления, которое селективно соединяет третий вращающийся элемент RE3 с корпусом 522, который является невращающимся элементом.
[0282] Второй планетарный зубчатый механизм 548 второго дифференциала 612 способен служить в качестве механизм деления мощности, который распределяет мощность двигателя 512, которая сообщается первой солнечной шестерне S1, между первой вращающейся электрической машиной MG1 и первым водилом СА1 в состоянии, когда относительное результирующее движение разрешено. Таким образом, транспортное средство 600 способно выполнять привод от двигателя путем использования прямого крутящего момента (именуемого также прямым крутящим моментом двигателя) и крутящего момента Tm машины MG2. Прямой крутящий момент двигателя механически передается на первое водило СА1, заставляя первую вращающуюся электрическую машину MG1 обеспечивать противодействующую силу против крутящего момента Те двигателя, который сообщается первой солнечной шестерне S1. Крутящий момент Tm машины MG2 генерируется второй вращающейся электрической машиной MG2. Вторая вращающаяся электрическая машина MG2 приводится в действие путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1 благодаря мощности, распределенной на первую вращающуюся электрическую машину MG1. Таким образом, второй дифференциал 612 служит в качестве известного вариатора электрической машины (электрического вариатора). То есть второй дифференциал 612 представляет собой трансмиссионный механизм электрической машины, в котором дифференциальный статус второго планетарного зубчатого механизма 548 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1.
[0283] Первый дифференциал 614 способен устанавливать четыре состояния, то есть состояние прямого соединения, состояние повышающей передачи, нейтральное состояние и состояние внутренней блокировки путем изменения рабочих статусов сцепления С1 и тормоза В1. В частности, когда сцепление С1 находится в состоянии сцеплено, первый дифференциал 614 переходит в состояние прямого соединения, в котором вращающиеся элементы первого планетарного зубчатого механизма 550 вращаются как одно целое. Когда тормоз В1 находится в состоянии сцеплено, первый дифференциал 614 переходит в состояние повышающей передачи, в котором скорость вращения второй солнечной шестерни S2 увеличивается по сравнению с оборотами Ne двигателя. Когда сцепление С1 находится в состоянии сцеплено, и тормоз В1 находится в состоянии сцеплено, первый дифференциал 614 переходит в нейтральное состояние, где относительное движение первого планетарного зубчатого механизма 550 разрешено. Когда сцепление С1 находится в состоянии расцеплено, и тормоз В1 расцеплен, первый дифференциал 614 переходит в состояние внутренней блокировки, в котором вращение каждого из вращающихся элементов первого планетарного зубчатого механизма 550 останавливается.
[0284] Первый блок 604 передачи мощности способен образовывать вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности во втором дифференциале 612. То есть в первом блоке 604 передачи мощности в дополнение к факту, что первая солнечная шестерня S1 (четвертый вращающийся элемент RE4) соединена со второй солнечной шестерней S2 (вторым вращающимся элементом RE2), первая кольцевая шестерня R1 (пятый вращающийся элемент RE5) соединяется со второй кольцевой шестерней R2 (третьим вращающимся элементом RE3) путем включения сцепления CR. В результате, второй дифференциал 612 и первый дифференциал 614 образуют один дифференциальный механизм, второй дифференциал 612 и первый дифференциал 614 в целом могут служить в качестве вариатора электрической машины, который работает при коэффициенте распределения, мощности отличном от коэффициента распределения мощности только второго дифференциала 612.
[0285] В первом блоке 604 передачи мощности первый дифференциал 614 и второй дифференциал 612, которыми устанавливаются четыре состояния, соединены друг с другом, и транспортное средство 600 способно достичь множества режимов привода (описанных далее) синхронно с изменением рабочего статуса сцепления CR.
[0286] В выполненном таким образом первом блоке 604 передачи мощности мощность двигателя 512 и мощность первой вращающейся электрической машины MG1 передаются на ведущий вал 608. Поэтому двигатель 512 и первая вращающаяся электрическая машина MG1 соединяются с ведущими колесами 516 через первый блок 604 передачи мощности, при этом передается мощность.
[0287] Второй блок 606 передачи мощности расположен коаксиально с входным валом 542 (или ведущим валом 608) и включает в себя вторую вращающуюся электрическую машину MG2 и третий планетарный зубчатый механизм 616, соединенный с ведущим валом 608. Третий планетарный зубчатый механизм 616 представляет собой известный одноступенчатый планетарный зубчатый механизм. Третий планетарный зубчатый механизм 616 включает в себя третью солнечную шестерню S3, третьи ведущие шестерни Р3, третье водило СА3 и третью кольцевую шестерню R3. Третье водило СА3 поддерживает третьи ведущие шестерни Р3, при этом любая третья ведущая шестерня Р3 способна поворачиваться и вращаться. Третья кольцевая шестерня R3 находится в зацеплении с третьей солнечной шестерней S3 через третьи ведущие шестерни Р3. Третья солнечная шестерня S3 представляет собой входной элемент, соединенный с валом 556 ротора второй вращающейся электрической машины MG2. Третья кольцевая шестерня R3 представляет собой противодействующий элемент, соединенный с корпусом 522. Третье водило СА3 представляет собой выходной элемент, соединенный с ведущим валом 608. Выполненный таким образом третий планетарный зубчатый механизм 616 служит в качестве редукторного механизма, который уменьшает скорость Nm вращения машины MG2 и передает скорость Nm вращения машины MG2 на ведущий вал 608. Таким образом, во втором блоке 606 передачи мощности мощность второй вращающейся электрической машины MG2 передается на ведущий вал 608 без прохождения через первый блок 604 передачи мощности. Таким образом, вторая вращающаяся электрическая машина MG2 соединена с ведущими колесами 516 так, чтобы передавать мощность без прохождения через первый блок 604 передачи мощности.
[0288] Выполненная таким образом система 602 передачи мощности предпочтительно используется для заднеприводного (ЗП) транспортного средства с передним расположением двигателя. В системе 602 передачи мощности мощность двигателя 512, мощность первой вращающейся электрической машины MG1 или мощность второй вращающейся электрической машины MG2 передается на ведущий вал 608 и передается по порядку от ведущего вала 608 на ведущие колеса 516 через шестерню 538 дифференциала, оси 540 и пр.
[0289] Транспортное средство 600 включает в себя электронный блок 580 управления, включающий в себя контроллер, который управляет устройствами, относящимися к движению. Транспортное средство 600 дополнительно включает в себя блок 518 управления мощностью, аккумуляторный блок 520, гидравлический контур 554 управления, насос ЭМН 555 и пр.
[0290] Режимы привода, которые могут выполняться транспортным средством 600, будут описаны со ссылкой на фиг. 40, и фиг. 41-48. На фиг. 40 представлена диаграмма работы сцепления, на которой показан рабочий статус каждого из узлов - сцепления С1, тормоза В1 и сцепления CR в каждом режиме привода. Значок кружок, пропуск, значок треугольник, «G» и «М» на схеме на фиг. 40 такие же, что и такие же значки на фиг. 19 согласно вышеописанному шестому варианту осуществления, при этом их описание опущено. Как показано на фиг. 40, транспортное средство 600 способно селективно выполнять режим привода ЭТС и режим привода ГТС в качестве режима привода.
[0291] На фиг. 41-48 представлены номограммы, которые соответственно показывают скорости вращения вращающихся элементов от RE1 до RE6 во втором планетарном зубчатом механизме 548 и первом планетарном зубчатом механизме 550. На этих номограммах вертикальные линии Y1 - Y4 обозначают скорости вращения вращающихся элементов. С левой стороны, если смотреть на лист, вертикальная линия Y1 обозначает скорость вращения первой кольцевой шестерни R1, которая представляет собой пятый вращающийся элемент RE5, соединенный с первой вращающейся электрической машиной MG1, и скорость вращения второй кольцевой шестерни R2, которая представляет собой третий вращающийся элемент RE3, который селективно соединяется с корпусом 522 через тормоз В1, вертикальная линия Y2 обозначает скорость вращения второго водила СА2, которое представляет собой первый вращающийся элемент RE1, соединенный с двигателем 512, вертикальная линия Y3 обозначает скорость вращения первого водила СА1, которое является шестым вращающимся элементом RE6, соединенным с ведущим валом 608, и вертикальная линия Y4 обозначает скорость вращения первой солнечной шестерни S1, которая представляет собой четвертый вращающийся элемент RE4 и скорость вращения второй солнечной шестерни S2, которая представляет собой второй вращающийся элемент RE2, при этом первая солнечная шестерня S1 и вторая солнечная шестерня S2 соединены друг с другом. Различные значки, то есть значок незакрашенный квадрат, значок незакрашенный кружок, значок незакрашенный ромб, значок закрашенный кружок, значок закрашенный ромб, стрелка, сцепление С1, непрерывная линия и пунктирная линия, являются такими же, что и на фиг. 20 - фиг. 27 вышеописанного шестого варианта осуществления, при этом их описание опущено.
[0292] На фиг. 41 представлена номограмма в режиме ЭТС с одним электрическим двигателем. Как показано на фиг. 40, режим ЭТС с одним электрическим двигателем осуществляется в состоянии, когда и сцепление С1, и тормоз В1, и сцепление CR находятся в состоянии расцеплено. Блок 582 гибридного управления останавливает работу двигателя 512, и выдает крутящий момент Tm машины MG2, чтобы придать движение транспортному средству 600 от второй вращающейся электрической машины MG2. На фиг. 41 показан случай в то время, когда транспортное средство 600 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении (то есть направлении вращения первого водила СА1 в то время, когда транспортное средство 600 движется вперед) для выдачи положительного крутящего момента. В то время когда транспортное средство 600 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении в отличие от работы в то время, когда транспортное средство 600 движется вперед. Когда дополнительно двигатель используется в качестве тормоза, сцепление С1 или сцепление CR сцеплено (см. дополнительное использование двигателя в качестве тормоза в режиме ЭТС с одним электрическим двигателем), как показано на фиг. 40. Двигатель может работать в качестве тормоза путем включения тормоза В1.
[0293] На фиг. 42 представлена номограмма в режиме ЭТС с двумя электрическими двигателями. Как показано на фиг. 40, режим ЭТС с двумя электрическими двигателями осуществляется в состоянии, когда сцепление С1 и тормоз В1 включены, а сцепление CR находится в состоянии расцеплено. Блок 582 гибридного управления останавливает работу двигателя 512, и заставляет первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 выдавать крутящий момент Tg машины MG2 и крутящий момент Tm машины MG2, чтобы придать движение транспортному средству 600. На фиг. 42 показан случай в то время, когда транспортное средство 600 движется вперед в состоянии, когда и первая вращающаяся электрическая машина MG1, и вторая вращающаяся электрическая машина MG2, вращаются в положительном направлении, чтобы выдавать положительный крутящий момент. В то время, когда транспортное средство 600 движется назад, первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 вращаются в противоположном направлении в отличие от работы в то время, когда транспортное средство 600 движется вперед.
[0294] На фиг. 43 представлена номограмма в то время, когда транспортное средство 600 движется вперед в режиме ПОВ/П для ГТС в режиме привода ГТС. На фиг. 44 представлена номограмма в то время, когда транспортное средство 600 движется назад в режиме ПОВ/П для ГТС в режиме привода ГТС. Как показано на фиг. 40, движение вперед в режиме ПОВ/П для ГТС и движение задним ходом в режиме ПОВ/П для ГТС достигаются в состоянии, когда сцепление С1 и тормоз В1 расцеплены, а сцепление CR сцеплено. В режиме ПОВ/П для ГТС, второй дифференциал 612 и первый дифференциал 614 в целом образуют вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности только второго дифференциала 612. Таким образом, первый блок 604 передачи мощности способен распределять мощность двигателя 512, которая сообщается второму водилу СА2 между первой кольцевой шестерней R1 и первым водилом СА1. То есть в первом блоке 604 передачи мощности прямой крутящий момент двигателя механически передается на первое водило СА1, заставляя первую вращающуюся электрическую машину MG1 обеспечивать противодействующую силу против крутящего момента Те двигателя, который сообщается второму водилу СА2, а электрическая энергия, генерируемая первой вращающейся электрической машиной MG1 путем использования мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, передается на вторую вращающуюся электрическую машину MG2 через заданный электрический контур. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG2, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машины MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. На фиг. 43 показан случай в то время, когда транспортное средство 600 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении, чтобы выдавать положительный крутящий момент. На фиг. 44 показан случай в то время, когда транспортное средство 600 движется назад в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в отрицательном направлении для выдачи отрицательного крутящего момента.
[0295] На фиг. 45 представлена номограмма в то время, когда транспортное средство 600 движется вперед в режиме ПОН/П для ГТС в режиме привода ГТС, и показывает случай переключения на низкую передачу, где обороты Ne двигателя подаются с постоянной скоростью на компоненты, которые успешно выполняют функции вариатора электрической машины. На фиг. 46 представлена номограмма в то время, когда транспортное средство 600 движется вперед в режиме ПОН/П для ГТС в режиме привода ГТС, и показывает случай переключения на высокую передачу, где обороты Ne двигателя увеличиваются по скорости и сообщаются компонентам, которые выполняют функции вариатора электрической машины. Как показано на фиг. 40, переключение на пониженную передачу в режиме ПОН/П для ГТС (далее именуемый режимом ПОН/П для ГТС Lo) осуществляется в состоянии, когда сцепление С1 находится в состоянии сцеплено, а тормоз В1 и сцепление CR находятся в состоянии расцеплено. Как показано на фиг. 40, переключение на повышенную передачу в режиме ПОН/П для ГТС (далее именуемом режимом ПОН/П для ГТС Hi) осуществляется в состоянии, когда тормоз В1 находится в состоянии сцеплено, а сцепление С1 и сцепление CR находятся в состоянии расцеплено. В режиме ПОН/П для ГТС Lo, сцепление С1 сцеплено, а тормоз В1 находится в состоянии расцеплено, и первый дифференциал 614 переходит в состояние прямого соединения, при этом мощность двигателя 512 передается первой солнечной шестерне S1, соединенной со второй солнечной шестерней S2 в состоянии, когда обороты Ne двигателя остаются неизменными. С другой стороны, в режиме ПОН/П для ГТС Hi сцепление С1 находится в состоянии расцеплено, а тормоз В1 находится в состоянии сцеплено, и первый дифференциал 614 переходит в состояние повышающей передачи, при этом мощность двигателя 512 передается первой солнечной шестерне S1, соединенной со второй солнечной шестерней S2 в состоянии, когда обороты Ne двигателя увеличиваются. Кроме того, в режиме ПОН/П для ГТС, сцепление CR расцеплено, при этом второй дифференциал 612 в одиночку образует вариатор электрической машины. Таким образом, первый блок 604 передачи мощности способен распределять мощность двигателя 512, которая сообщается первой солнечной шестерне S1, между первой кольцевой шестерней R1 и первым водилом СА1. То есть в первом блоке 604 передачи мощности, прямой крутящий момент двигателя механически передается на первое водило СА1, заставляя первую вращающуюся электрическую машину MG1 обеспечивать противодействующую силу против крутящего момента Те двигателя, который сообщается первой солнечной шестерне S1, а электрическая энергия, генерируемая первой вращающейся электрической машиной MG1 с использованием мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, передается на вторую вращающуюся электрическую машину MG2 через заданный электрический контур. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. И на фиг. 45 и на фиг. 46 показан случай в то время, когда транспортное средство 600 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 выдает положительный крутящий момент в положительном направлении. В то время, когда транспортное средство 600 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении, в отличие от работы в то время, когда транспортное средство 600 движется вперед.
[0296] Как описано со ссылкой на фиг. 43-46, режим ПОВ/П для ГТС и режим ПОН/П для ГТС отличаются друг от друга вращающимся элементом, которому сообщается мощность двигателя 512, компонентами, которые выполняют функции вариатора электрической машины, при этом режим ПОВ/П для ГТС и режим ПОН/П для ГТС отличаются друг от друга коэффициентом распределения мощности в то время, когда первый блок 604 передачи мощности должен служить в качестве вариатора электрической машины. Прямой крутящий момент двигателя в режиме ПОВ/П для ГТС уменьшается по сравнению с крутящим моментом Те двигателя. С другой стороны, прямой крутящий момент двигателя в режиме ПОН/П для ГТС Lo увеличивается по сравнению с крутящим моментом Те двигателя. В настоящем варианте осуществления изобретения второй дифференциал 612 в одиночку образует вариатор электрической машины в режиме ПОН/П для ГТС (см. фиг. 45 и фиг. 46). Таким образом, когда дифференциальный статус второго дифференциала 612 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено, а сцепление CR находится в состоянии расцеплено, крутящий момент, увеличившийся по сравнению с крутящим моментом Те двигателя, механически передается на первое водило СА1.
[0297] На фиг. 47 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС, и показывает случай прямого соединения, где вращающиеся элементы второго дифференциала 612 и первый дифференциал 614 вращаются как одно целое. Как показано на фиг. 40, режим фиксированной передачи с прямым соединением осуществляется в состоянии, когда сцепление С1 и сцепление CR включены, а тормоз В1 находится в состоянии расцеплено. Таким образом, первый блок 604 передачи мощности способен напрямую выдавать мощность двигателя 512 от первого водила СА1. Блок 582 гибридного управления заставляет двигатель 512 выдавать крутящий момент Те двигателя, чтобы придать движение транспортному средству 600. Таким образом, блок 582 гибридного управления может не только обеспечить выдачу крутящего момента Те двигателя, но и заставить также, по меньшей мере, либо первую вращающуюся электрическую машину MG1, либо вторую вращающуюся электрическую машину MG2 выдавать крутящий момент, чтобы придать движение транспортному средству 600.
[0298] На фиг. 48 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТ, которая показывает случай повышенной передачи (ПОВ/П), где вращение двигателя 512 увеличивается по скорости и выдается от первого водила СА1. Как показано на фиг. 40, ПОВ/П в режиме неподвижной шестерни (далее именуемом ПОВ/П режимом фиксированной передачи) осуществляется в состоянии, когда тормоз В1 и сцепление CR включены, а сцепление С1 расцеплено. В ПОВ/П режиме фиксированной передачи, сцепление CR находится в состоянии сцеплено, при этом второй дифференциал 612 и первый дифференциал 614 образуют один дифференциальный механизм. Кроме того, в ПОВ/П режиме фиксированной передачи, тормоз В1 находится в состоянии сцеплено, а сцепление С1 находится в состоянии расцеплено, при этом первый дифференциал 614 переходит в состояние повышающей передачи. Таким образом, в первом блоке 604 передачи мощности, вращение двигателя 512, которое сообщается второму водилу СА2, увеличивается по скорости и выдается от первого водила СА1. Блок 582 гибридного управления заставляет двигатель 512 выдавать крутящий момент Те двигателя, чтобы придать движение транспортному средству 600. Таким образом, блок 582 гибридного управления может не только обеспечить выдачу крутящего момента Те двигателя, но и заставить также вторую вращающуюся электрическую машину MG2 выдавать крутящий момент, чтобы придать движение транспортному средству 600. ПОВ/П режим фиксированной передачи эффективен, например, при улучшении потребления топлива во время движения на высокой скорости.
[0299] Блок 582 гибридного управления определяет, какой режим привода должен быть установлен путем внесения скорости V транспортного средства и нагрузки транспортного средства (например, требуемого приводного крутящего момента) в карту изменения режима привода, как показано на фиг. 30 или фиг. 31 вышеописанного шестого варианта осуществления. Когда определенный режим привода представляет собой текущий режим привода, блок 582 гибридного управления поддерживает текущий режим привода. Когда этот определенный режим привода отличен от текущего режима привода, блок 582 гибридного управления устанавливает этот определенный режим привода вместо текущего режима привода. В настоящем варианте осуществления в области каждого режима фиксированной передачи с прямым соединением, показанным на фиг. 30 и фиг. 31, область высокой скорости транспортного средства может быть установлена для области ПОВ/П режима фиксированной передачи.
[0300] Блок 584 изменения мощности передачи управляет работой сцеплений (рабочими статусами) сцепления С1, тормоза В1 и сцепления CR на основе режима привода, установленного блоком 582 гибридного управления. Блок 584 изменения мощности передачи выдает сигнал Sp команды управления гидравликой для сцепления и/или расцепления каждого из узлов - сцепления С1, тормоза В1 и сцепления CR на гидравлический контур 554 управления, чтобы обеспечить передачу мощности для движения в режиме привода, установленного блоком 582 гибридного управления.
[0301] Таким образом, когда двигатель 512 запускается в режиме ЭТС с одним электрическим двигателем, электронный блок 580 управления устанавливает сцепление С1, сцепление CR или тормоз В1 во включенное состояние, и в этом состоянии воспламеняет топливо, при необходимости увеличивая при этом обороты Ne двигателя с использованием первой вращающейся электрической машины MG1. При таком запуске двигателя, электронный блок 580 управления дополнительно заставляет вторую вращающуюся электрическую машину MG2 выдавать компенсирующий крутящий момент Tmadd в качестве противодействующей силы для нейтрализации крутящего момента.
[0302] В транспортном средстве 600 согласно настоящему варианту осуществления изобретения, как и в случае транспортного средства 510 вышеописанных шестого и седьмого вариантов осуществления изобретения, возникает обеспокоенность, что вторая вращающаяся электрическая машина MG2 не может в достаточной степени компенсировать падение приводного крутящего момента и, в результате, невозможно уменьшить толчок во время запуска двигателя. Напротив, в транспортном средстве 600 согласно настоящему варианту осуществления изобретения, как и в случае транспортного средства 510 вышеописанных шестого и седьмого вариантов осуществления, выполняется запуск двигателя с включением сцепления CR. То есть операции управления электронного блока 580 управления, показанные в вышеописанных шестом и седьмом вариантах осуществления, могут быть применены на транспортном средстве 600 согласно настоящему варианту осуществления изобретения. Таким образом, согласно настоящему варианту осуществления достигаются предпочтительные результаты аналогичные таковым в вышеописанных шестом и седьмом вариантах осуществления изобретения.
[0303] На фиг. 49 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства 700 согласно девятому варианту осуществления изобретения. На фиг. 49 транспортное средство 700 представляет собой гибридное транспортное средство, включающее в себя двигатель 512, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, систему 702 передачи мощности и ведущие колеса 516. Система 702 передачи мощности включает в себя первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2.
[0304] Система 702 передачи мощности расположена в контуре передачи мощности между двигателем 512 и ведущими колесами 516. Система 702 передачи мощности включает в себя первый блок 704 передачи мощности, второй блок 526 передачи мощности, ведомую шестерню 530, ведомый вал 532, шестерню 534 конечной передачи (которая имеет меньший диаметр, чем ведомая шестерня 530), шестерню 538 дифференциала и пр. внутри корпуса 522. Ведомая шестерня 530 находится в зацеплении с ведущей шестерней 528. Ведущая шестерня 528 представляет собой выходной вращающийся элемент первого блока 704 передачи мощности. Ведомая шестерня 530 жестко прикреплена к ведомому валу 532, с тем, чтобы быть неповоротной относительно его. Шестерня 534 конечной передачи жестко прикреплена к ведомому валу 532 с тем, чтобы быть неповоротной относительно его. Шестерня 538 дифференциала находится в зацеплении с шестерней 534 конечной передачи через дифференциальную кольцевую шестерню 536. Система 702 передачи мощности включает в себя оси 540, соединенные с шестерней 538 дифференциала, и пр.
[0305] Первый блок 704 передачи мощности расположен коаксиально с входным валом 542, который представляет собой входной вращающийся элемент первого блока 704 передачи мощности, и включает в себя второй дифференциал 706, первый дифференциал 708 и сцепление CR. Второй дифференциал 706 включает в себя второй планетарный зубчатый механизм 548 (второй дифференциальный механизм) и первую вращающуюся электрическую машину MG1. Первый дифференциал 708 включает в себя первый планетарный зубчатый механизм 710 (первый дифференциальный механизм), сцепление С1 и тормоз В1. Первый планетарный зубчатый механизм 710 представляет собой известный двухступенчатый планетарный зубчатый механизм. Первый планетарный зубчатый механизм 710 включает в себя вторую солнечную шестерню S2, множество пар находящихся во взаимном зацеплении вторых ведущих шестерен Р2а, P2b, второе водило СА2 и вторую кольцевую шестерню R2. Второе водило СА2 поддерживает вторые ведущие шестерни Р2а, P2b, при этом любая из вторых ведущих шестерен Р2а, P2b способна поворачиваться и вращаться. Вторая кольцевая шестерня R2 находится в зацеплении со второй солнечной шестерней S2 через вторые ведущие шестерни Р2а, P2b. Первый планетарный зубчатый механизм 710 служит в качестве дифференциального механизма, который выполняет дифференциальное действие.
[0306] Во втором дифференциале 706, первая солнечная шестерня S1 представляет собой четвертый вращающийся элемент RE4 в качестве входного элемента, соединенного с выходным вращающимся элементом (то есть второй солнечной шестерней S2 первого планетарного зубчатого механизма 710) первого дифференциала 708, и служит в качестве входного вращающегося элемента второго дифференциала 706. Первая кольцевая шестерня R1 соединена с валом 552 ротора первой вращающейся электрической машины MG1 и представляет собой пятый вращающийся элемент RE5, являющийся противодействующим элементом, с которым соединена первая вращающаяся электрическая машина MG1 так, что передается мощность. Первое водило СА1 соединено как одно целое с ведущей шестерней 528 и представляет собой пятый вращающийся элемент RE5, который представляет собой выходной элемент, соединенный с ведущими колесами 516. Первое водило СА1 служит в качестве выходного вращающегося элемента второго дифференциала 706.
[0307] В первом дифференциале 708 вторая кольцевая шестерня R2 соединена с входным валом 542, и является первым вращающимся элементом RE1, с которым двигатель 512 соединен через входной вал 542 так, что передается мощность. Вторая кольцевая шестерня R2 служит в качестве входного вращающегося элемента первого дифференциала 708. Второе водило СА2 представляет собой третий вращающийся элемент RE3, селективно соединяемый с корпусом 522 через тормоз В1. Вторая солнечная шестерня S2 представляет собой второй вращающийся элемент RE2, соединенный с входным вращающимся элементом (то есть первой солнечной шестерней S1 второго планетарного зубчатого механизма 548) второго дифференциала 706. Вторая солнечная шестерня S2 служит в качестве выходного вращающегося элемента первого дифференциала 708. Второе водило СА2 и вторая кольцевая шестерня R2 селективно соединяются друг с другом через сцепление С1. Первая кольцевая шестерня R1 и второе водило СА2 селективно соединяются друг с другом через сцепление CR. Таким образом, сцепление С1 представляет собой первое устройство сцепления, которое селективно соединяет первый вращающийся элемент RE1 с третьим вращающимся элементом RE3. Сцепление CR представляет собой второе устройство сцепления, которое селективно соединяет пятый вращающийся элемент RE5 с третьим вращающимся элементом RE3. Тормоз В1 представляет собой третье устройство сцепления, которое селективно соединяет третий вращающийся элемент RE3 с корпусом 522, который является невращающимся элементом.
[0308] Второй планетарный зубчатый механизм 548 второго дифференциала 612 способен служить в качестве механизма деления мощности, который распределяет мощность двигателя 512, сообщаемую первой солнечной шестерне S1, между первой вращающейся электрической машиной MG1 и первым водилом СА1 в состоянии, когда относительное движение разрешено. Таким образом, транспортное средство 700 способно выполнять привод от двигателя путем использования прямого крутящего момента (именуемого также прямым крутящим моментом двигателя) и крутящего момента Tm машины MG2. Прямой крутящий момент двигателя механически передается на первое водило СА1, заставляя первую вращающуюся электрическую машину MG2 обеспечивать противодействующую силу против крутящего момента Те двигателя, который сообщается первой солнечной шестерне S1. Крутящий момент Tm машины MG2 генерируется второй вращающейся электрической машиной MG2. Вторая вращающаяся электрическая машина MG2 приводится в действие путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1 благодаря мощности, распределенной на первую вращающуюся электрическую машину MG1. Таким образом, второй дифференциал 706 служит в качестве известного электрического дифференциала (вариатора электрической машины). То есть второй дифференциал 706 представляет собой вариатор электрической машины, в котором дифференциальный статус второго планетарного зубчатого механизма 548 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1.
[0309] Первый дифференциал 708 способен устанавливать четыре состояния, то есть состояние прямого соединения, состояние повышающей передачи, нейтральное состояние и состояние внутренней блокировки, путем изменения рабочих статусов сцепления С1 и тормоза В1. В частности, когда сцепление С1 находится в состоянии сцеплено, первый дифференциал 708 переходит в состояние прямого соединения, в котором вращающиеся элементы первого планетарного зубчатого механизма 710 вращаются как одно целое. Когда тормоз В1 сцеплен, первый дифференциал 708 переходит в состояние повышающей передачи, в котором скорость вращения второй солнечной шестерни S2 увеличивается по сравнению с оборотами Ne двигателя. Когда сцепление С1 расцеплено и тормоз В1 расцеплен, первый дифференциал 708 переходит в нейтральное состояние, где относительное движение первого планетарного зубчатого механизма 710 разрешено. Когда сцепление С1 сцеплено, и тормоз В1 сцеплен, первый дифференциал 708 переходит в состояние внутренней блокировки, в котором вращение каждого из вращающихся элементов первого планетарного зубчатого механизма 710 останавливается.
[0310] Первый блок 704 передачи мощности способен образовывать вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности во втором дифференциале 706. То есть в первом блоке 704 передачи мощности в дополнение к тому факту, что первая солнечная шестерня S1 (четвертый вращающийся элемент RE4) соединена со второй солнечной шестерней S2 (вторым вращающимся элементом RE2), первая кольцевая шестерня R1 (пятый вращающийся элемент RE5) соединена со вторым водилом СА2 (третьим вращающимся элементом RE3) путем включения сцепления CR. В результате, второй дифференциал 706 и первый дифференциал 708 образуют один дифференциальный механизм, второй дифференциал 706 и первый дифференциал 708 в целом могут служить в качестве вариатора электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности одного второго дифференциала 706.
[0311] В первом блоке 704 передачи мощности, первый дифференциал 708 и второй дифференциал 706, которыми устанавливаются четыре состояния, соединены друг с другом, и транспортное средство 700 способно достичь множества режимов привода синхронно с изменением рабочего статуса сцепления cr.
[0312] В выполненном таким образом первом блоке 704 передачи мощности, мощность двигателя 512 и мощность первой вращающейся электрической машины mg1 передаются от ведущей шестерни 528 на ведомую шестерню 530, поэтому двигатель 512 и первая вращающаяся электрическая машина mg1 соединяются с ведущими колесами 516 через первый блок 704 передачи мощности так, что передается мощность.
[0313] Во втором блоке 526 передачи мощности мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530 без прохождения через первый блок 704 передачи мощности. Поэтому вторая вращающаяся электрическая машина MG2 соединена с ведущими колесами 516 так, что при этом передается мощность без прохождения через первый блок 704 передачи мощности. То есть вторая вращающаяся электрическая машина MG2 представляет собой вращающуюся электрическую машину, соединенную с осями 540, которые являются выходными вращающимися элементами системы 702 передачи мощности так, что при этом мощность передается без прохождения через первый блок 704 передачи мощности.
[0314] Выполненная таким образом система 702 передачи мощности предпочтительно используется для переднеприводного (FF) транспортного средства. В системе 702 передачи мощности, мощность двигателя 512, мощность первой вращающейся электрической машины MG1 или мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530 и передается по порядку от ведомой шестерни 530 на ведущие колеса 516 через шестерню 534 конечной передачи, шестерню 538 дифференциала, оси 540, и пр. В транспортном средстве 700 двигатель 512, первый блок 704 передачи мощности и первая вращающаяся электрическая машина MG1 расположены вдоль оси, отличной от оси, вдоль которой расположена вторая вращающаяся электрическая машина MG2 так, что при этом осевая длина уменьшается.
[0315] Транспортное средство 700 включает в себя электронный блок 580 управления, включающий в себя контроллер, который управляет устройствами, относящимися к движению. Транспортное средство 700 дополнительно включает в себя блок 518 управления мощностью, аккумуляторный блок 520, гидравлический контур 554 управления, насос ЭМН 555, и пр.
[0316] Транспортное средство 700 способно селективно выполнять режим привода ЭТС и режим привода ГТС в качестве режима привода. Каждый режим привода, который может выполняться в транспортном средстве 700, и рабочие статусы устройств сцепления в каждом режиме привода такие же, что и каждый режим привода, и рабочие статусы устройств сцепления, показанные на схеме на фиг. 40 вышеописанного восьмого варианта осуществления. Поскольку первый планетарный зубчатый механизм 710 представляет собой двухступенчатый планетарный зубчатый механизм в настоящем варианте осуществления изобретения, номограммы, соответствующие режимам привода, такие же, что и номограммы, полученные при перестановке второго водила СА2 и второй кольцевой шестерни R2 друг с другом на номограммах на фиг. 41-48 вышеописанного шестого варианта осуществления. Поэтому описание со ссылкой на эти номограммы опущено. На фиг. 50 представлена номограмма, полученная при перестановке второго водила СА2 и второй кольцевой шестерни R2 друг с другом на фиг. 41. Номограммы, которые получены при перестановке второго водила СА2 и второй кольцевой шестерни R2 друг с другом, на фиг. 42-48 не показаны.
[0317] Как и в случае вышеописанного восьмого варианта осуществления, операции управления электронного блока 580 управления, показанные в вышеописанных шестом и седьмом вариантах осуществления, могут быть применены на транспортном средстве 700 согласно настоящему варианту осуществления изобретения. Таким образом, согласно настоящему варианту осуществления изобретения, достигаются преимущества, аналогичные таковым в вышеописанных седьмом и восьмом вариантах осуществления.
[0318] Варианты осуществления изобретения с шестого по девятый описаны подробно со ссылкой на сопровождающие чертежи; однако изобретение может быть применено и к другим вариантам осуществления изобретения.
[0319] Например, в вышеописанных вариантах осуществления изобретения, как показано на блок-схеме на фиг. 36, запуск двигателя с включением сцепления CR или обычный запуск двигателя выбирается и выполняется на основе того, является ли компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, недостаточным, и температуры THoil рабочего масла; однако изобретение не ограничивается этой конфигурацией. Например, может быть применен вариант осуществления изобретения, в котором способ запуска двигателя меняется на основе того, является ли компенсирующий крутящий момент Tmadd недостаточным, или может быть применена температура THoil рабочего масла, либо может быть применен вариант осуществления изобретения, в котором двигатель постоянно запускается посредством запуска двигателя с включением сцепления CR. В этих вариантах осуществления, этапы S10, S20, S70 на блок-схеме на фиг. 36 при необходимости опускаются. Также может быть применен вариант осуществления, в котором участие MG1 не выполняется во время запуска двигателя посредством запуска двигателя с включением сцепления CR. В этом варианте осуществления этапы S40, S50, S60 на блок-схеме с фиг. 36 опущены. Когда сцепление CR выполнено с возможностью изменения своего рабочего статуса в зависимости от электрической мощности, то, выполнять ли запуск двигателя с включением сцепления CR, может быть определено на основе статуса источника подачи электрической энергии. Таким образом, этапы блок-схемы на фиг. 36 могут при необходимости меняться.
[0320] В вышеописанных вариантах осуществления изобретения первое устройство сцепления представляет собой сцепление С1, которое селективно соединяет первый вращающийся элемент RE1 с третьим вращающимся элементом RE3; однако изобретение не ограничивается этой конфигурацией. Например, первое устройство сцепления может представлять собой сцепление, которое селективно соединяет первый вращающийся элемент RE1 со вторым вращающимся элементом RE2 или может представлять собой сцепление, которое селективно соединяет третий вращающийся элемент RE3 со вторым вращающимся элементом RE2. Если коротко, первое устройство сцепления должно быть сцеплением, которое выполнено с возможностью соединения любых двух элементов из следующих - первый вращающийся элемент RE1, второй вращающийся элемент RE2 и третий вращающийся элемент RE3.
[0321] В вышеописанных вариантах осуществления изобретения, каждый второй дифференциал 544, 612, 706 включает в себя одноступенчатый второй планетарный зубчатый механизм 548. Вместо этого, каждый второй дифференциал 544, 612, 706 может включать в себя двухступенчатый планетарный зубчатый механизм. В случае с двухступенчатым планетарным зубчатым механизмом, один элемент из числа - солнечная шестерня, либо водило представляют собой четвертый вращающийся элемент, другой элемент является шестым вращающимся элементом, а кольцевая шестерня представляет собой пятый вращающийся элемент.
[0322] В вышеописанных вариантах осуществления изобретения, каждое транспортное средств 510, 600, 700 включает в себя тормоз В1. Вместо этого, тормоз В1 может быть предусмотрен не всегда. Даже когда каждое транспортное средство 510, 600, 700 не включает в себя тормоз В1, каждое транспортное средство 510, 600, 700 способно селективно устанавливать режим ЭТС с одним электрическим двигателем или режим привода ГТС и способно менять режим управления между режимом ПОВ/П для ГТС и режимом ПОН/П для ГТС в режиме привода ГТС. Если коротко, при условии, что транспортное средство включает в себя двигатель 512, второй дифференциал 544, 612, 706, первый дифференциал 546, 614, 708, и вторую вращающуюся электрическую машину MG2, соединенную с ведущими колесами 516 так, что при этом передается мощность, изобретение может быть применено на этом транспортном средстве. Ведущие колеса W2, с которыми соединена вторая вращающаяся электрическая машина MG2 так, что при этом передается мощность, не всегда должны быть такими же, что и ведущие колеса 516, с которыми соединен шестой вращающийся элемент второго дифференциала 544, 612, 706 так, что при этом передается мощность. Например, одна из пар передних колес и пара задних колес может представлять собой ведущие колеса 516, а другая пара может являться ведущими колесами W2. В таком случае ведущие колеса 516 и ведущие колеса W2 являются ведущими колесами, и шестой вращающийся элемент и вторая вращающаяся электрическая машина MG2 соединяются с этими ведущими колесами одновременно так, что при этом передается мощность.
[0323] На фиг. 51 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства 810 согласно десятому варианту осуществления изобретения, и которая также иллюстрирует соответствующий участок системы управления для управления устройствами. На фиг. 51 транспортное средство 810 представляет собой гибридное транспортное средство, включающее в себя двигатель (ДВИГ) 512, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, систему 814 передачи мощности и ведущие колеса 516. Двигатель (ДВИГ) 512, первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 могут служить в качестве источника движущей силы, чтобы придать движение транспортному средству 810. Система 814 передачи мощности включает в себя первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2.
[0324] Двигатель 512 представляет собой известный двигатель внутреннего сгорания, который сжигает заданное топливо для выдачи мощности и представляет собой, например, бензиновый двигатель, дизельный двигатель и пр. Крутящий момент Те двигателя 512 управляется в соответствии с рабочими статусами, например, степенью открывания дросселя или объемом всасываемого воздуха, количеством подаваемого топлива и моментом зажигания, которые управляются электронным блоком 580 управления (описанном далее).
[0325] Каждая первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 представляет собой так называемый электрический двигатель-генератор, который имеет функцию электрического двигателя (электромотора), который генерирует приводной крутящий момент, и функцию генератора. Каждая первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 соединена с аккумуляторным блоком 520 через блок 518 управления мощностью. Блок 518 управления мощностью включает в себя инвертор, сглаживающий конденсатор, и пр. Аккумуляторный блок 520 служит в качестве электрического накопительного устройства, которое обменивается электрической энергией с каждой из машин - первой вращающейся электрической машиной MG1 и второй вращающейся электрической машиной MG2. Блок 518 управления мощностью управляется электронным блоком 580 управления (описанным далее), при этом производится управление крутящим моментом Tg машины MG1, который представляет собой выходной крутящий момент (тяговый крутящий момент или регенеративный крутящий момент) первой вращающейся электрической машины MG1, а также крутящим моментом Tm машины MG2, который представляет собой выходной крутящий момент (тяговый крутящий момент или регенеративный крутящий момент) второй вращающейся электрической машины MG2.
[0326] Система 814 передачи мощности расположена в контуре передачи мощности между двигателем 512 и ведущими колесами 516. Система 814 передачи мощности включает в себя первый блок 824 передачи мощности, второй блок 526 передачи мощности, ведомую шестерню 530, ведомый вал 532, шестерню 534 конечной передачи (которая имеет меньший диаметр, чем ведомая шестерня 530), шестерню 538 дифференциала и пр. внутри корпуса 522. Корпус 522 представляет собой невращающийся элемент, установленный на кузов транспортного средства. Ведомая шестерня 530 находится в зацеплении с ведущей шестерней 528. Ведущая шестерня 528 представляет собой выходной вращающийся элемент первого блока 824 передачи мощности. Ведомая шестерня 530 жестко прикреплена к ведомому валу 532 с тем, чтобы быть неповоротной относительно его. Шестерня 534 конечной передачи жестко прикреплена к ведомому валу 532 с тем, чтобы быть неповоротной относительно его. Шестерня 538 дифференциала находится в зацеплении с шестерней 534 конечной передачи через дифференциальную кольцевую шестерню 536. Система 814 передачи мощности включает в себя оси 540, соединенные с шестерней 538 дифференциала, и пр.
[0327] Первый блок 824 передачи мощности расположен коаксиально с входным валом 542, который представляет собой входной вращающийся элемент первого блока 824 передачи мощности, и включает в себя второй дифференциал 844, первый дифференциал 846 и сцепление CR. Второй дифференциал 844 включает в себя второй планетарный зубчатый механизм 848 (второй дифференциальный механизм) и первую вращающуюся электрическую машину MG1. Первый дифференциал 846 включает в себя первый планетарный зубчатый механизм 850 (первый дифференциальный механизм), сцепление С1 и тормоз В1.
[0328] Второй планетарный зубчатый механизм 848 представляет собой известный одноступенчатый планетарный зубчатый механизм. Второй планетарный зубчатый механизм 848 включает в себя первую солнечную шестерню S1, первые ведущие шестерни Р1, первое водило СА1 и первую кольцевую шестерню R1. Первое водило СА1 поддерживает первые ведущие шестерни Р1, при этом каждая первая ведущая шестерня Р1 способна поворачиваться и вращаться. Первая кольцевая шестерня R1 находится в зацеплении с первой солнечной шестерней S1 через первые ведущие шестерни Р1. Второй планетарный зубчатый механизм 848 служит в качестве дифференциального механизма, который выполняет дифференциальное действие. Первый планетарный зубчатый механизм 850 представляет собой известный одноступенчатый планетарный зубчатый механизм. Первый планетарный зубчатый механизм 850 включает в себя вторую солнечную шестерню S2, вторые ведущие шестерни Р2, второе водило СА2 и вторую кольцевую шестерню R2. Второе водило СА2 поддерживает вторые ведущие шестерни Р2, при этом каждая второй ведущая шестерня Р2 способна поворачиваться и вращаться. Вторая кольцевая шестерня R2 находится в зацеплении со второй солнечной шестерней S2 через вторые ведущие шестерни Р2. Первый планетарный зубчатый механизм 550 служит в качестве дифференциального механизма, который выполняет дифференциальное действие.
[0329] Первое водило СА1 представляет собой четвертый вращающийся элемент RE4, который является входным элементом, соединенным с выходным вращающимся элементом первого дифференциала 846 (то есть второй кольцевой шестерней R2 первого планетарного зубчатого механизма 850), и служит в качестве входного вращающегося элемента второго дифференциала 844. Первая солнечная шестерня S1 соединена как одно целое с валом 552 ротора первой вращающейся электрической машины ЭГ1 и представляет собой пятый вращающийся элемент RE5, являющийся противодействущим элементом, с которым соединена первая вращающаяся электрическая машина MG1 так, что при этом передается мощность. Первая кольцевая шестерня R1 соединена как одно целое с ведущей шестерней 528 и является шестым вращающимся элементом RE6, который представляет собой выходной элемент, соединенный с ведущими колесами 516. Первая кольцевая шестерня R1 служит в качестве выходного вращающегося элемента второго дифференциала 844.
[0330] Вторая солнечная шестерня S2 представляет собой первый вращающийся элемент RE1, который соединен как одно целое с входным валом 542, и с которым двигатель 512 соединен через входной вал 542 так, что при этом передается мощность. Вторая солнечная шестерня S2 служит в качестве входного вращающегося элемента первого дифференциала 846. Второе водило СА2 представляет собой третий вращающийся элемент RE3, селективно соединяемый с корпусом 522 через тормоз В1. Вторая кольцевая шестерня R2 представляет собой второй вращающийся элемент RE2, соединенный с входным вращающимся элементом второго дифференциала 844 (то есть с первым водилом СА1 второго планетарного зубчатого механизма 848). Вторая кольцевая шестерня R2 служит в качестве выходного вращающегося элемента первого дифференциала 846. Второе водило СА2 и вторая кольцевая шестерня R2 селективно соединяются друг с другом через сцепление С1. Первая кольцевая шестерня R1 и второе водило СА2 селективно соединяются друг с другом через сцепление CR. Таким образом, сцепление С1 представляет собой первое устройство сцепления, которое селективно соединяет второй вращающийся элемент RE2 с третьим вращающимся элементом RE3. Сцепление CR представляет собой второе устройство сцепления, которое селективно соединяет шестой вращающийся элемент RE6 с третьим вращающимся элементом RE3. Тормоз В1 представляет собой третье устройство сцепления, которое селективно соединяет третий вращающийся элемент RE3 с корпусом 522, который является невращающимся элементом.
[0331] Каждое из сцеплений - сцепление С1, тормоз В1 и сцепление CR - предпочтительно представляет собой фрикционное устройство сцепления мокрого типа, и представляет собой многодисковое гидравлическое фрикционное устройство сцепления, рабочий статус которого управляется гидравлическим приводом. Рабочие статусы (например, состояние сцеплено и состояние расцеплено) сцепления С1, тормоза В1 и сцепления CR управляются в соответствии с гидравлическим давлением, соответственно подаваемым из гидравлического контура 554 управления (например, гидравлическое давление Pc1 сцепления C1, В1 гидравлическое давление Pb1 тормоза В1 и CR гидравлическое давление Pcr сцепления CR) в результате управления гидравлическим контуром 554 управления электронным блоком 580 управления (описанным далее). Гидравлический контур 554 управления расположен в транспортном средстве 810. Транспортное средство 810 включает в себя механический масляный насос 555 (именуемый также насос МН 555). В системе 814 передачи мощности рабочее масло (масло), используемое для изменения рабочих статусов сцепления С1, тормоза В1 и сцепления CR, смазывает устройства и охлаждает устройства, подается с использованием насоса МН 555. Насос МН 555 соединяется с любой из вращающихся частей (которые являются синонимами вращающихся элементов) системы 814 передачи мощности, и приводится в действие вращением сопряженного вращающегося элемента. В настоящем варианте осуществления насос МН 555 соединен с четвертым вращающимся элементом RE4 (который является синонимом второго вращающегося элемента RE2). Когда подача рабочего масла требуется во время остановки вращения вращающегося элемента, с которым соединен насос МН 555, предусмотрен электрический масляный насос, например, в дополнение к насосу МН 555. Как вариант, вместо насоса МН 555 может быть предусмотрен электрический масляный насос.
[0332] Второй планетарный зубчатый механизм 848 способен служить в качестве механизма распределения мощности, который делит (что является синонимом распределяет) мощность двигателя 512, сообщенную первому водилу СА1, между первой вращающейся электрической машиной MG1 и первой кольцевой шестерней R1 в состоянии, когда относительное движение разрешено. Таким образом, транспортное средство 810 способно выполнять привод от двигателя путем использования прямого крутящего момента (именуемого также прямым крутящим моментом двигателя) и крутящего момента Tm машины MG2. Прямой крутящий момент двигателя механически передается на первую кольцевую шестерню R1, заставляя первую вращающуюся электрическую машину MG1 обеспечивать противодействующую силу против крутящего момента Те двигателя, который сообщается первому водилу СА1. Крутящий момент Tm машины MG2 генерируется второй вращающейся электрической машиной MG2. Вторая вращающаяся электрическая машина MG2 приводится в действие путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1 благодаря мощности, распределенной на первую вращающуюся электрическую машину MG1. Таким образом, второй дифференциал 844 служит в качестве известного электрического дифференциала электрической машины (вариатора электрической машины), который управляет передаточным числом (отношением скоростей) посредством управления блоком 518 управления мощностью с помощью электронного блока 580 управления (описанного далее) для управления рабочим статусом первой вращающейся электрической машины MG1. То есть второй дифференциал 844 представляет собой трансмиссионный механизм электрической машины, в котором дифференциальный статус второго планетарного зубчатого механизма 848 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1.
[0333] Первый дифференциал 846 способен устанавливать четыре состояния, то есть состояние прямого соединения, состояние изменения скорости обратного вращения двигателя 512, нейтральное состояние и состояние внутренней блокировки, путем изменения рабочих статусов сцепления С1 и тормоза B1. В частности, когда сцепление С1 находится в состоянии сцеплено, первый дифференциал 846 переходит в состояние прямого соединения, где вращающиеся элементы первого планетарного зубчатого механизма 850 вращаются как одно целое. Когда тормоз В1 находится в состоянии сцеплено, первый дифференциал 846 переходит в состояние изменения скорости обратного вращения двигателя 512, в котором вторая кольцевая шестерня R2 (выходной вращающийся элемент первого дифференциала 846) вращается в отрицательном направлении в ответ на положительное вращение скорости вращения Ne двигателя. Когда сцепление С1 находится в состоянии расцеплено, и тормоз В1 расцеплен, первый дифференциал 846 переходит в нейтральное состояние, где относительное движение первого планетарного зубчатого механизма 850 разрешено. Когда сцепление С1 расцеплено и тормоз В1 расцеплен, первый дифференциал 846 переходит в состояние внутренней блокировки, в котором вращение каждого из вращающихся элементов первого планетарного зубчатого механизма 850 останавливается.
[0334] Первый блок 824 передачи мощности способен образовывать вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности во втором дифференциале 844. То есть в первом блоке 824 передачи мощности в дополнение к тому факту, что первое водило СА1 (четвертый вращающийся элемент RE4) соединяется со второй кольцевой шестерней R2 (вторым вращающимся элементом RE2), первая кольцевая шестерня R1 (шестой вращающийся элемент RE6) соединена со вторым водилом СА2 (третьим вращающимся элементом RE3) путем включения сцепления CR. В результате, второй дифференциал 844 и первый дифференциал 846 образуют один дифференциальный механизм, второй дифференциал 844 и первый дифференциал 846 в целом могут служить в качестве вариатора электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности только одного второго дифференциала 844.
[0335] В первом блоке 824 передачи мощности, первый дифференциал 846 и второй дифференциал 844, которыми устанавливаются четыре состояния, соединены друг с другом, и транспортное средство 810 способно достичь множества режимов привода (описанных далее) синхронно с изменением рабочего статуса сцепления CR.
[0336] В выполненном таким образом первом блоке 824 передачи мощности, мощность двигателя 512 и мощность первой вращающейся электрической машины MG1 передаются от ведущей шестерни 528 на ведомую шестерню 530. Поэтому двигатель 512 и первая вращающаяся электрическая машина MG1 соединяются с ведущими колесами 516 через первый блок 824 передачи мощности так, что при этом передается мощность.
[0337] Второй блок 526 передачи мощности сконфигурирован, как описано в вышеописанном шестом варианте осуществления изобретения, так что его описание опущено.
[0338] Выполненная таким образом система 814 передачи мощности предпочтительно используется для переднеприводного (FF) транспортного средства с передним расположением двигателя. В системе 814 передачи мощности мощность двигателя 512, мощность первой вращающейся электрической машины MG1 или мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530 и последовательно передается от ведомой шестерни 530 на ведущие колеса 516 через шестерню 534 конечной передачи, шестерню 538 дифференциала, оси 540, и пр. В транспортном средстве 810 двигатель 512, первый блок 824 передачи мощности и первая вращающаяся электрическая машина MG1 расположены вдоль оси, отличной от оси, вдоль которой расположена вторая вращающаяся электрическая машина MG2 так, что при этом осевая длина уменьшается. Кроме того, коэффициент редукции второй вращающейся электрической машины MG2 может быть увеличен с использованием шестеренчатой пары ведомой шестерни 530 и редуктора 558.
[0339] Транспортное средство 810 включает в себя электронный блок 580 управления, имеющий такую же конфигурацию, что и у вышеописанного шестого варианта осуществления.
[0340] Различные сигналы на основе определенных величин различных датчиков и пр., расположенных в транспортном средстве 810, подаются на электронный блок 580 управления. Различные датчики включают в себя, например, датчик 560 оборотов двигателя, датчик 562 выходной скорости вращения, датчик 564 скорости вращения MG1, например, вращающийся синусно-косинусный трансформатор, датчик 566 скорости вращения MG2, например, вращающийся синусно-косинусный трансформатор, датчик 568 величины хода педали акселератора, датчик 570 положения переключения, датчик 572 аккумулятора, датчик 574 гидравлического давления сцепления CR, датчик 576 температуры масла, и пр. Различные сигналы включают в себя, например, обороты Ne двигателя, выходные обороты No, которые представляют собой скорость вращения ведущей шестерни 528, соответствующие скорости V транспортного средства, скорость Ng вращения MG1, скорость Nm вращения MG2, величину перемещения θасс акселератора, рабочее положение POSsh рычага переключения передач, температуру THbat аккумулятора, ток Ibat зарядки/разрядки аккумулятора и напряжение Vbat аккумулятора аккумуляторного блока 520, гидравлическое давление Pcr, сцепление CR, температуру THoil рабочего масла, которая является температурой рабочего масла, и пр. Различные командные сигналы подаются из электронного блока 580 управления на устройства, расположенные в транспортном средстве 810. Устройства включают в себя, например, двигатель 512, блок 518 управления мощностью, гидравлический контур 554 управления, и пр. Различные командные сигналы включают в себя, например, сигнал Se команды управления двигателем, сигнал Sm команды управления вращающейся электрической машиной, сигнал Sp команды управления гидравликой, и пр. Электронный блок 580 управления вычисляет состояние зарядки (заряд емкости) СЗ (далее именуемое емкостью аккумулятора СЗ) аккумуляторного блока 520 на основе, например, тока Ibat зарядки/разрядки аккумулятора, напряжения Vbat аккумулятора, и пр.
[0341] Электронный блок 580 управления включает в себя гибридное средство управления, то есть блок 582 гибридного управления, и средство изменения мощности передачи, то есть блок 584 изменения мощности передачи, с тем чтобы реализовать функции управления для различных органов управления в транспортном средстве 810, как в случае вышеописанного шестого варианта осуществления. Блок 582 гибридного управления и блок 584 изменения мощности передачи уже описаны, поэтому их описание здесь опущено.
[0342] Режимы привода, которые могут выполняться транспортным средством 810, будут описаны со ссылкой на фиг. 52 и фиг. 53-60. На фиг. 52 представлена диаграмма работы сцепления, на которой показан рабочий статус каждого из узлов - сцепления С1, тормоза В1 и сцепления CR в каждом режиме привода. На диаграмме работы сцепления на фиг. 52 значок кружок обозначает включенное (сцепленное) состояние соответствующего устройства сцепления (C1, B1, CR), пропуск обозначает расцепленное состояние, а значок треугольник обозначает, что какое-то из сцеплений или оба включены в то время, когда используется также торможение двигателем, которое устанавливает остановленный двигатель 512 в состояние совместного вращения. Кроме того, «G» обозначает, что вращающаяся электрическая машина (MG1, MG2) должна главным образом служить в качестве генератора, а «М» обозначает, что вращающаяся электрическая машина (MG1, MG2) должна главным образом служить в качестве электрического двигателя, когда вращающаяся электрическая машина (MG1, MG2) приводится в действие, и главным образом должна служить в качестве генератора, когда вращающаяся электрическая машина (ЭГ1, ЭГ2) выполняет регенерацию. Как показано на фиг. 52, транспортное средство 810 способно селективно выполнять режим привода ЭТС и режим привода ГТС в качестве режима привода. Режим привода ЭТС включает в себя два режима, то есть режим ЭТС с одним электрическим двигателем и режим ЭТС с двумя электрическими двигателями. Режим ЭТС с одним электрическим двигателем представляет собой режим управления, в котором задействован режим привода ЭТС, в котором используется вторая вращающаяся электрическая машина MG2 в качестве единственного источника движущей силы. Режим ЭТС с двумя электрическими двигателями представляет собой режим управления, в котором задействован режим привода ЭТС, использующий первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 в качестве источника движущей силы. Режим привода ГТС включает в себя три режима, то есть режим повышающей передачи (ПОВ/П) на первичном валу (далее именуемый режимом ПОВ/П для ГТС), режим понижающей передачи (ПОН/П) на первичном валу (далее именуемый режимом ПОН/П для ГТС), и режим фиксированной передачи.
[0343] На фиг. 53-60 представлены номограммы, которые соответственно показывают скорости вращения вращающихся элементов RE1 - RE6 во втором планетарном зубчатом механизме 848 и первом планетарном зубчатом механизме 850. На этих номограммах вертикальные линии Y1 - Y4 обозначают скорости вращения вращающихся элементов. С левой стороны, если смотреть на лист, вертикальная линия Y1 обозначает скорость вращения первой солнечной шестерни S1, которая представляет собой пятый вращающийся элемент RE5, соединенный с первой вращающейся электрической машиной MG1, вертикальная линия Y2 обозначает скорость вращения первого водила СА1, которое представляет собой четвертый вращающийся элемент RE4, и скорость вращения второй кольцевой шестерни R2, которая представляет собой второй вращающийся элемент RE2, при этом первое водило СА1 и вторая кольцевая шестерня R2 соединены друг с другом, вертикальная линия Y3 обозначает скорость вращения первой кольцевой шестерни R1, которая является шестым вращающимся элементом RE6, соединенным с ведущей шестерней 528, и скорость вращения второго водила СА2, которое представляет собой третий вращающийся элемент RE3, который селективно соединяется с корпусом 522 через тормоз В1, и вертикальная линия Y4 обозначает скорость вращения второй солнечной шестерни S2, которая представляет собой первый вращающийся элемент RE1, соединенный с двигателем 512. Стрелка, соединенная со значком незакрашенного квадрата, обозначает крутящий момент Tg машины MG1, стрелка, соединенная со значком незакрашенного кружка, обозначает крутящий момент Те двигателя, и стрелка, соединенная со значком закрашенного кружка, обозначает крутящий момент Tm машины MG2. Обозначенное линиями сцепление С1, которое селективно соединяет второе водило СА2 со второй кольцевой шестерней R2, обозначает расцепленное состояние сцепления С1, а заштрихованное (затемненное) сцепление С1 обозначает включенное состояние сцепления С1. Значок незакрашенного ромба на тормозе В1, который селективно соединяет второе водило СА2 с корпусом 522, обозначает расцепленное состояние тормоза В1, а значок закрашенного ромба обозначает включенное состояние тормоза В1. Значок незакрашенного ромба на сцеплении CR, который селективно соединяет первую кольцевую шестерню R1 со вторым водилом СА2, обозначает расцепленное состояние сцепления CR, а значок закрашенного ромба обозначает включенное состояние сцепления CR. Прямая линия, которая соответственно выражает скорости вращения, относящиеся ко второму планетарному зубчатому механизму 848, обозначена сплошной линией, а прямая линия, которая соответственно выражает скорости вращения, относящиеся к первому планетарному зубчатому механизму 850, обозначена штриховой линией. Стрелка, соединенная со значком закрашенного кружка, обозначает крутящий момент Tm машины MG2, генерируемый второй вращающейся электрической машиной MG2, которая приводится в действие путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1 с использованием мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, и не включает в себя прямой крутящий момент двигателя. Значок закрашенного ромба на сцеплении CR накладывается со значком закрашенного кружка, при этом значок закрашенного ромба на сцеплении CR не показан на чертежах.
[0344] На фиг. 53 представлена номограмма в режиме ЭТС с одним электрическим двигателем. Как показано на фиг. 52, режим ЭТС с одним электрическим двигателем осуществляется в состоянии, когда и сцепление С1, и тормоз В1, и сцепление CR расцеплены. В режиме ЭТС с одним электрическим двигателем, сцепление С1 и тормоз В1 расцеплены, относительное движение первого планетарного зубчатого механизма 850 разрешено, и первый дифференциал 846 переходит в нейтральное состояние. Блок 582 гибридного управления останавливает работу двигателя 512 и выдает крутящий момент Tm машины MG2, чтобы придать движение транспортному средству 810, из второй вращающейся электрической машины MG2. Фиг. 53 показывает случай в то время, когда транспортное средство 810 движется вперед в состоянии, в котором вторая вращающаяся электрическая машина MG2 вращается в положительном направлении (то есть в направлении вращения первой кольцевой шестерни R1 в то время, когда транспортное средство 810 движется вперед), чтобы выдавать положительный крутящий момент. В то время, когда транспортное средство 810 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении в отличие от работы в то время, когда транспортное средство 810 движется вперед. Во время движения транспортного средства 810 первая кольцевая шестерня R1, соединенная с ведущей шестерней 528, вращается синхронно с вращением второй вращающейся электрической машины MG2 (что является синонимом вращения ведущих колес 516). В режиме ЭТС с одним электрическим двигателем, сцепление CR также расцепляется, при этом двигатель 512 и первая вращающаяся электрическая машина MG1 не вращаются совместно, при этом обороты Ne двигателя и скорость Ng вращения MG1 могут быть установлены на ноль. При такой конфигурации можно повысить эффективность расходования электрической энергии (то есть снизить потребление электрической энергии) путем уменьшения потерь на сопротивлении каждого из узлов - двигателя 512 и первой вращающейся электрической машины MG1. Блок 582 гибридного управления поддерживает скорость Ng вращения MG1 на нуле во время управления с обратной связью. В качестве альтернативного варианта блок 582 гибридного управления поддерживает скорость Ng вращения MG1 на нуле путем осуществления управления (управления по оси d) для пропускания тока на первую вращающуюся электрическую машину MG1, при этом вращение первой вращающейся электрической машины MG1 фиксируется. В качестве альтернативного варианта, когда скорость Ng вращения MG1 поддерживается на нуле путем блокировки крутящего момента первой вращающейся электрической машины MG1, даже когда крутящий момент Tg машины MG1 устанавливается на ноль, не требуется добавления крутящего момента Tg машины MG1. Даже когда управление поддержанием скорости Ng вращения MG1 на нуле было выполнено, поскольку первый блок 524 передачи мощности находится в нейтральном состоянии, где противодействующая сила против крутящего момента Tg машины MG1 выдаваться не может, приводной крутящий момент это не затрагивает. В режиме ЭТС с одним электрическим двигателем, первая вращающаяся электрическая машина MG1 может быть переведена в состояние отсутствия нагрузки на холостом ходу.
[0345] В режиме ЭТЧ с одним электрическим двигателем, остановленный двигатель 512 не вращается совместно и переходит в остановленное состояние с нулевым вращением, при этом, когда регенеративное управление выполняется применительно ко второй вращающейся электрической машине MG2 во время движения транспортного средства 810 в режиме ЭТ с одним электрическим двигателем, может быть получено большое количество регенеративной электрической энергии. Когда аккумуляторный блок 520 переходит в полностью заряженное состояние и не может накапливать регенеративную энергию во время движения транспортного средства 810 в режиме ЭТС с одним электрическим двигателем, можно дополнительно использовать торможение двигателем. Когда дополнительно используется торможение двигателем, сцепление С1 или сцепление CR находится в состоянии сцеплено (см. торможение двигателем дополнительно используется в режиме ЭТС с одним электрическим двигателем) как показано на фиг. 52. Когда сцепление С1 или сцепление CR находится в состоянии сцеплено, двигатель 512 переходит в состояние совместного вращения. Когда обороты Ne двигателя увеличиваются первой вращающейся электрической машиной MG1 в этом состоянии, можно заставить работать торможение двигателем. Обороты Ne двигателя могут быть установлены на ноль даже в состоянии совместного вращения двигателя 512. В этом случае выполняется режим привода ЭТС, не заставляя работать торможение двигателем. Торможение двигателем может работать путем включения тормоза В1.
[0346] На фиг. 54 представлена номограмма в режиме ЭТС с двумя электрическими двигателями. Как показано на фиг. 52, режим ЭТС с двумя электрическими двигателями осуществляется в состоянии, когда сцепление С1 и тормоз В1 включены, а сцепление CR находится в состоянии расцеплено. В режиме ЭТС с двумя электрическими двигателями, сцепление С1 и тормоз В1 включены, и относительное движение первого планетарного зубчатого механизма 850 запрещено, при этом вращение второго водила СА2 остановлено. По этой причине вращение всех вращающихся элементов первого планетарного зубчатого механизма 850 остановлено, при этом первый дифференциал 846 переходит в состояние внутренней блокировки. Таким образом, двигатель 512 переходит в остановленное состояние на нулевое вращение, и первое водило СА1, соединенное со второй кольцевой шестерней R2, также фиксируется при нулевом вращении. Когда первое водило СА1 фиксируется так, чтобы быть неповоротным, противодействующий крутящий момент против крутящего момента Tg машины MG1 выдается первым водилом СА1, при этом можно заставить крутящий момент на основе крутящего момента Tg машины MG1 механически выдаваться от первой кольцевой шестерни R1 и передаваться на ведущие колеса 516. Блок 582 гибридного управления останавливает работу двигателя 512 и заставляет первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 выдавать крутящий момент Tg машины MG1 и крутящий момент Tm машины MG2, чтобы придать движение транспортному средству 810. На фиг. 54 показан случай в то время, когда транспортное средство 810 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении, чтобы выдавать положительный крутящий момент, а первая вращающаяся электрическая машина MG1 вращается в отрицательном направлении для выдачи отрицательного крутящего момента. В то время, когда транспортное средство 810 движется назад, первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 вращаются в противоположном направлении в отличие от работы в то время, когда транспортное средство 810 движется вперед.
[0347] Как описано со ссылкой на фиг. 53 и фиг. 54, можно приводить в движение транспортное средство 810 с использованием только второй вращающейся электрической машины MG2 в режиме ЭТС с одним электрическим двигателем, и можно приводить в движение транспортное средство 810 с использованием первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2 в режиме ЭТС с двумя электрическими двигателями. Поэтому, когда транспортное средство 810 выполняет режим привода ЭТС, устанавливается режим ЭТС с одним электрическим двигателем, и транспортное средство 810 приводится в действие только второй вращающейся электрической машиной MG2 при низкой нагрузке, и устанавливается режим ЭТС с двумя электрическими двигателями, и транспортное средство 810 приводится в действие и первой вращающейся электрической машиной MG1 и второй вращающейся электрической машиной MG2 при высокой нагрузке. В том числе в режиме привода ГТС регенерация во время замедления транспортного средства 810 главным образом выполняется второй вращающейся электрической машиной MG2.
[0348] На фиг. 55 представлена номограмма в то время, когда транспортное средство 810 движется вперед в режиме ПОВ/П для ГТС в режиме привода ГТС. Как показано на фиг. 52, движение вперед в режиме ПОВ/П для ГТС (далее именуемом режимом ПОВ/П для ГТС (движение вперед)) осуществляется в состоянии, когда сцепление С1 находится в состоянии сцеплено, а тормоз В1 и сцепление CR расцеплены. В режиме ПОВ/П для ГТС (движение вперед), сцепление С1 сцеплено, тормоз В1 находится в состоянии расцеплено, и первый дифференциал 846 переходит в состояние прямого соединения, при этом мощность двигателя 512 напрямую передается на первое водило СА1, соединенное со второй кольцевой шестерней R2. Кроме того, в режиме ПОВ/П для ГТС (движение вперед), сцепление CR находится в состоянии расцеплено, при этом второй дифференциал 844 в одиночку образует вариатор электрической машины. Таким образом, первый блок 824 передачи мощности способен распределять мощность двигателя 512, которая сообщается на первое водило СА1, между первой солнечной шестерней S1 и первой кольцевой шестерней R1. То есть в первом блоке 824 передачи мощности прямой крутящий момент двигателя механически передается на первую кольцевую шестерню R1 путем создания противодействующей силы против крутящего момента Те двигателя, который сообщается на первое водило СА1 с использованием первой вращающейся электрической машины MG1, а электрическая энергия, генерируемая первой вращающейся электрической машиной MG1 путем использования мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, передается на вторую вращающуюся электрическую машину MG2 через заданный электрический контур. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. На фиг. 55 показан случай в то время, когда транспортное средство 810 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении, чтобы выдавать положительный крутящий момент.
[0349] На фиг. 56 представлена номограмма в режиме ПОН/П для ГТС в режиме привода ГТС. Как показано на фиг. 52, режим ПОН/П для ГТС осуществляется в состоянии, в котором сцепление С1 и тормоз В1 расцеплены, а сцепление CR сцеплено. В режиме ПОН/П для ГТС сцепление CR сцеплено, при этом второй дифференциал 844 и первый дифференциал 846 образуют один дифференциальный механизм. Кроме того, в режиме ПОН/П для ГТС сцепление С1 и тормоз В1 расцеплены, при этом второй дифференциал 844 и первый дифференциал 846 в целом образуют вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициент распределения мощности одного второго дифференциала 844. Таким образом, первый блок 824 передачи мощности способен распределять мощность двигателя 512, сообщаемого второй солнечной шестерней S2, между первой солнечной шестерней S1 и первой кольцевой шестерней R1. То есть в первом блоке сцепления CR 824 передачи мощности прямой крутящий момент двигателя механически передается на первую кольцевую шестерню R1 путем создания противодействующей силы против крутящего момента Те двигателя, сообщаемого второй солнечной шестерней SS с использованием первой вращающейся электрической машины MG1, а электрическая энергия, генерируемая первой вращающейся электрической машиной MG1 путем использования мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, передается на вторую вращающуюся электрическую машину MG2 через заданный электрический контур. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. На фиг. 55 показан случай в то время, когда транспортное средство 810 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении, чтобы выдавать положительный крутящий момент. В то время, когда транспортное средство 810 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении в отличие от работы в то время, когда транспортное средство 810 движется вперед. Во время движения задним ходом, положительное вращение и крутящий момент двигателя 512 напрямую сообщаются компонентам, которые осуществляют функцию вариатора электрической машины, то есть на входе достигается вращение двигателя вперед.
[0350] На Фиг. 57 представлена номограмма в то время, когда транспортное средство 810 движется назад в режиме ПОВ/П для ГТС в режиме привода ГТС и показывает случай ввода обратного вращения двигателя, в котором вращение и крутящий момент двигателя 512 преобразуются в отрицательные величины, и сообщаются компонентам, которые осуществляют функции вариатора электрической машины. Как показано на фиг. 52, движение задним ходом при вводе обратного вращения двигателя в режиме ПОВ/П для ГТС (далее именуемом режимом ПОВ/П для ГТС для ввода обратного вращения (движения задним ходом)) осуществляется в состоянии, в котором тормоз В1 находится в состоянии сцеплено, а сцепление С1 и сцепление CR находятся в состоянии расцеплено. В режиме ПОВ/П для ГТС для ввода обратного вращения (движения задним ходом) сцепление С1 расцеплено, а тормоз В1 включен, и первый дифференциал 546 переходит в состояние изменения скорости обратного вращения двигателя 512, при этом мощность двигателя 512 передается при отрицательном вращении и отрицательном крутящем моменте на первое водило СА1, соединенное со второй кольцевой шестерней R2. Кроме того, в режиме ПОВ/П для ГТС при вводе обратного вращения (движения задним ходом) сцепление CR расцеплено, при этом второй дифференциал 844 в одиночку образует вариатор электрической машины. Таким образом, первый блок 824 передачи мощности способен распределять мощность двигателя 512, который сообщается с первым водилом СА1, в противоположном направлении, между первой солнечной шестерней S1 и первой кольцевой шестерней R1. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машины MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. Фиг. 57 показывает случай в то время, когда транспортное средство 810 движется назад в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в отрицательном направлении для выдачи отрицательного крутящего момента.
[0351] На фиг. 58 представлена номограмма в то время, когда транспортное средство 810 движется назад в режиме ПОВ/П для ГТС в режиме привода ГТС и показывает случай ввода вращения вперед двигателя. Как показано на фиг. 52, движение задним ходом с входным вращением вперед двигателя в режиме ПОВ/П для ГТС (далее именуемым режимом ПОВ/П для ГТС с вводом переднего вращения (движение задним ходом)) осуществляется в состоянии, в котором сцепление С1 находится в состоянии сцеплено, а тормоз В1 и сцепление CR выключены. В режиме ПОВ/П для ГТС с вводом переднего вращения (движение задним ходом) сцепление С1 сцеплено, а тормоз В1 выключен, при этом первый дифференциал 546 переходит в состояние прямого соединения с тем результатом, что мощность двигателя 512 напрямую передается на первое водило СА1, соединенное со второй кольцевой шестерней R2. Кроме того, в режиме ПОВ/П для ГТС с вводом переднего вращения (движение задним ходом) сцепление CR выключено, при этом второй дифференциал 844 в одиночку образует вариатор электрической машины. Таким образом, первый блок 824 передачи мощности способен распределять мощность двигателя 512, которая сообщается первому водилу СА1, между первой солнечной шестерней S1 и первой кольцевой шестерней R1. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. На фиг. 58 показан случай в то время, когда транспортное средство 810 движется назад в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в отрицательном направлении для выдачи отрицательного крутящего момента.
[0352] Как описано со ссылкой на фиг. 55-58, режим ПОВ/П для ГТС и режим ПОН/П для ГТС отличаются друг от друга вращающимся элементом, которому сообщается мощность двигателя 512, компонентами, которые осуществляют функции вариатора электрической машины, при этом режим ПОВ/П для ГТС и режим ПОН/П для ГТС отличаются друг от друга коэффициентом распределения мощности в то время, когда первый блок 824 передачи мощности должен служить в качестве вариатора электрической машины. То есть соотношение между выходными крутящими моментами вращающихся электрических машин MG1, MG2 и соотношение между скоростями вращения вращающихся электрических машин MG1, MG2 по отношению к двигателю 512 может меняться между режимом ПОВ/П для ГТС и режимом ПОН/П для ГТС. Рабочий статус сцепления CR меняется, чтобы изменить отношение выходного крутящего момента или скорость вращения каждой из вращающихся электрических машин MG1, MG2 по отношению к выходному крутящему моменту или оборотам двигателя 512 во время привода от двигателя.
[0353] Прямой крутящий момент двигателя в режиме ПОВ/П для ГТС (движение вперед) уменьшается по сравнению с крутящим моментом Те двигателя. С другой стороны, прямой крутящий момент двигателя в режиме ПОН/П для ГТС увеличивается по сравнению с крутящим моментом Те двигателя. В настоящем варианте осуществления второй дифференциал 844 в одиночку образует вариатор электрической машины в режиме ПОВ/П для ГТС (см. фиг. 55). Таким образом, когда дифференциальный статус второго дифференциала 844 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено, а сцепление CR находится в состоянии расцеплено, крутящий момент, снизившийся по сравнению с крутящим моментом Те двигателя, механически передается на первую кольцевую шестерню R1.
[0354] В состоянии так называемой механической точки, на которой скорость Ng вращения MG1 устанавливается на ноль, и мощность двигателя 512 полностью передается механически на первую кольцевую шестерню R1 без прохождения через электрический контур (контур передачи электрической энергии, который представляет собой электрический контур, связанный с обменом электрической энергией при ее подаче или приемке из первой вращающейся электрической машины MG1 или второй вращающейся электрической машине MG2), случай состояния повышающей передачи, в котором вращение двигателя 512 увеличивается и выдается от первой кольцевой шестерни R1, является режимом ПОВ/П для ГТС, а случай состояния понижающей передачи, в котором вращение двигателя 512 уменьшается и выдается от первой кольцевой шестерни R1, является режимом ПОН/П для ГТС.
[0355] На фиг. 59 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС и показывает случай прямого соединения, где вращающиеся элементы второго дифференциала 844 и первого дифференциала 846 вращаются как одно целое. Как показано на фиг. 52, прямое соединение в режиме неподвижной шестерни (далее именуемом режимом фиксированной передачи с прямым соединением) осуществляется в состоянии, когда сцепление С1 и сцепление CR включены, а тормоз В1 выключен. В режиме фиксированной передачи с прямым соединением сцепление С1 сцеплено, а тормоз В1 выключен, при этом первый дифференциал 846 переходит в состояние прямого соединения. Кроме того, в режиме фиксированной передачи с прямым соединением сцепление CR находится в состоянии сцеплено, при этом вращающиеся элементы второго дифференциала 844 и первый дифференциал 846 вращаются как одно целое. Таким образом, первый блок 824 передачи мощности способен напрямую выдавать мощность двигателя 512 от первой кольцевой шестерни R1. Блок 582 гибридного управления заставляет двигатель 512 выдавать крутящий момент Те двигателя, чтобы придать движение транспортному средству 810. В режиме фиксированной передачи с прямым соединением, также можно напрямую выдавать мощность первой вращающейся электрической машины MG1 от первой кольцевой шестерни R1 путем приведения в действие первой вращающейся электрической машины MG1 с использованием электрической энергии аккумуляторного блока 520. В режиме фиксированной передачи с прямым соединением, также можно передавать мощность второй вращающейся электрической машины MG2 на ведущие колеса 516 путем приведения в действие второй вращающейся электрической машины MG2 с использованием электрической энергии аккумуляторного блока 520. Таким образом, блок 582 гибридного управления может не только обеспечить выдачу крутящего момента Те двигателя, но и заставить также, по меньшей мере, либо первую вращающуюся электрическую машину MG1, либо вторую вращающуюся электрическую машину MG2, выдавать крутящий момент, чтобы придать движение транспортному средству 810. То есть в режиме фиксированной передачи с прямым соединением транспортное средство 810 может приводиться в движение только двигателем 512, или же ему может помогать крутящий момент, который генерируется первой вращающейся электрической машиной MG1 и/или второй вращающейся электрической машиной MG2.
[0356] На фиг. 60 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС, и показывает случай неподвижности выходного вала, где первая кольцевая шестерня R1 фиксируется так, чтобы быть неповоротной. Как показано на фиг. 52, выходной вал, фиксирующийся в режиме неподвижной шестерни (далее именуемый режимом фиксированной передачи на выходном валу), осуществляется в состоянии, когда тормоз В1 и сцепление CR включены, а сцепление С1 находится в состоянии расцеплено. В режиме фиксированной передачи на выходном валу сцепление CR находится в состоянии сцеплено, при этом второй дифференциал 844 и первый дифференциал 846 образуют один дифференциальный механизм. Кроме того, в режиме фиксированной передачи на выходном валу тормоз В1 включен, а сцепление С1 выключено, при этом первая кольцевая шестерня R1 фиксируется так, чтобы быть неповоротной. Таким образом, первый блок 824 передачи мощности способен обеспечивать противодействующую силу против мощности двигателя 512, сообщаемую второй солнечной шестерне S2, с использованием первой вращающейся электрической машины MG1. Поэтому в режиме фиксированной передачи на выходном валу можно заряжать аккумуляторный блок 520 электрической энергией, генерируемой первой вращающейся электрической машиной MG1 с использованием мощности двигателя 512. Блок 582 гибридного управления управляет двигателем 512, создает противодействующую силу против мощности двигателя 512 посредством генерирования мощности первой вращающейся электрической машиной MG1 и заряжает аккумуляторный блок 520 электрической энергией, генерируемой первой вращающейся электрической машиной MG1 через блок 518 управления мощностью. Поскольку первая кольцевая шестерня R1 фиксируется так, чтобы быть неповоротной в режиме фиксированной передачи на выходном валу, режим фиксированной передачи на выходном валу представляет собой режим, в котором аккумуляторный блок 520 эксклюзивно заряжается во время остановки транспортного средства 810. Как описано со ссылкой на фиг. 59 и фиг. 60, в режиме фиксированной передачи с прямым соединением или режиме фиксированной передачи на выходном валу в режиме привода ГТС, сцепление CR находится в состоянии сцеплено.
[0357] Как описано в вышеописанном шестом варианте осуществления со ссылкой на фиг. 5 и фиг. 28-29, режим ПОН/П для ГТС установлен при высокой нагрузке двигателя 512, где используется относительно большой коэффициент I редукции, и режим ПОВ/П для ГТС устанавливается при низкой нагрузке или высокой скорости транспортного средства двигателя 512, где используется относительно небольшой коэффициент I редукции. Таким образом, режим ПОН/П для ГТС или режим ПОВ/П для ГТС используется селективно. В результате возрастание крутящего момента или скорости вращения каждой из вращающихся электрических машин MG1, MG2 предотвращается или снижается, и реактивная мощность уменьшается при высокой скорости транспортного средства. Это ведет к снижению потерь при преобразовании энергии в электрическом контуре и совершенствованию потребления топлива. Как вариант, это ведет к уменьшению размеров каждой из вращающихся электрических машин MG1, MG2.
[0358] В каждом из режимов - режиме ПОН/П для ГТС и режиме ПОВ/П для ГТС - первый блок 824 передачи мощности должен служить в качестве вариатора электрической машины. Состояние, в котором коэффициент I редукции первого блока 824 передачи мощности равен «1», представляет собой состояние, эквивалентное состоянию режима фиксированной передачи с прямым соединением, в котором сцепление С1 и сцепление CR оба включены (см. фиг. 59). Поэтому предпочтительным образом блок 582 гибридного управления меняет режим управления между режимом ПОВ/П для ГТС (движение вперед), в котором сцепление С1 находится в состоянии сцеплено, и режимом ПОН/П для ГТС, в котором сцепление CR находится в состоянии сцеплено путем изменения рабочих статусов сцепления С1 и сцепления CR во время синхронизации состояния, где коэффициент I редукции равен «1».
[0359] Блок 582 гибридного управления определяет, какой режим привода должен устанавливаться путем внесения скорости V транспортного средства и нагрузки транспортного средства (например, требуемого приводного крутящего момента) в карту изменения режима привода, как показано на фиг. 30 или фиг. 31 вышеописанного шестого варианта осуществления изобретения. Когда этот определенный режим привода представляет собой текущий режим привода, блок 582 гибридного управления поддерживает текущий режим привода. Когда этот определенный режим привода отличен от текущего режима привода, блок 582 гибридного управления устанавливает этот определенный режим привода вместо текущего режима привода.
[0360] Когда установлен режим ЭТС с одним электрическим двигателем, блок 582 гибридного управления включает режим привода ЭТС, использующий только вторую вращающуюся электрическую машину MG2 в качестве источника движущей силы, чтобы придать движение транспортному средству 810. Когда установлен режим ЭТС с двумя электрическими двигателями, блок 582 гибридного управления включает режим привода ЭТС, использующий и первую вращающуюся электрическую машину MG1, и вторую вращающуюся электрическую машину MG2 в качестве источника движущей силы, чтобы придать движение транспортному средству 810.
[0361] Когда установлен режим ПОВ/П для ГТС или режим ПОН/П для ГТС, блок 582 гибридного управления включает привод от двигателя, где прямой крутящий момент двигателя передается первой кольцевой шестерне R1 путем создания противодействующей силы против мощности двигателя 512 посредством генерирования мощности первой вращающейся электрической машиной MG1, и крутящий момент передается на ведущие колеса 516 путем приведения в действие второй вращающейся электрической машины MG2 электрической энергией, генерируемой первой вращающейся электрической машиной MG1. В режиме ПОВ/П для ГТС или режиме ПОН/П для ГТС блок 582 гибридного управления управляет двигателем 512 в рабочей точке двигателя (то есть рабочей точке двигателя, выраженной оборотами Ne двигателя и крутящим моментом Те двигателя) с учетом известной оптимальной линии расхода топлива двигателем 512. В режиме ПОВ/П для ГТС или режиме ПОН/П для ГТС также можно приводить в действие вторую вращающуюся электрическую машину MG2 с помощью электрической энергии аккумуляторного блока 520 в дополнение к электрической энергии, генерируемой первой вращающейся электрической машиной MG1.
[0362] Когда установлен режим фиксированной передачи с прямым соединением, блок 582 гибридного управления включает привод от двигателя, где транспортное средство 810 движется путем прямой подачи мощности двигателя 512 от первой кольцевой шестерни R1. В режиме фиксированной передачи с прямым соединением блок 582 гибридного управления может заставить транспортное средство 810 двигаться путем прямой подачи мощности первой вращающейся электрической машины MG1 от первой кольцевой шестерни R1 с помощью приведения в действие первой вращающейся электрической машины MG1 посредством электрической энергии аккумуляторного блока 520 в дополнение к мощности двигателя 512 или передачи мощности второй вращающейся электрической машины MG2 на ведущие колеса 516 путем приведения в действие второй вращающейся электрической машины MG2 с помощью электрической энергии аккумуляторного блока 520.
[0363] Во время остановки транспортного средства 810, когда емкость аккумулятора СЗ ниже или равна заданной емкости, при которой определяется, что требуется зарядка, блок 582 гибридного управления устанавливает режим фиксированной передачи на выходном валу. Когда установлен режим фиксированной передачи на выходном валу, блок 582 гибридного управления создает противодействующую силу против мощности двигателя 512 посредством генерирования мощности первой вращающейся электрической машиной MG1 и заряжает аккумуляторный блок 520 электрической энергией, генерируемой первой вращающейся электрической машиной MG1 через блок 518 управления мощностью.
[0364] Как описано выше, в режиме ЭТС с одним электрическим двигателем, двигатель 512 переходит в состояние совместного вращения путем включения сцепления С1, сцепления CR или тормоза В1, и в этом состоянии можно увеличить обороты Ne двигателя с использованием первой вращающейся электрической машины MG1. Таким образом, когда двигатель 512 запускается в режиме ЭТС с одним электрическим двигателем, электронный блок 580 управления устанавливает сцепление С1, сцепление CR или тормоз В1 в зацепленное состояние, и в этом состоянии воспламеняет топливо, увеличивая при этом обороты Ne двигателя с использованием, если необходимо, первой вращающейся электрической машины MG1.
[0365] На Фиг. 61 представлена схема, которая иллюстрирует пример случая, где обороты Ne двигателя увеличиваются для запуска двигателя 512 путем генерирования крутящего момента Tg машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено в режиме ЭТС с одним электрическим двигателем со ссылкой на номограмму, идентичную номограммам с фиг. 53-60. На фиг. 61 при таком запуске двигателя крутящий момент Ted, соответствующий отрицательному крутящему моменту Те двигателя 512 (именуемый также втягивающим крутящим моментом двигателя), возникающим из-за возрастания скорости вращения остановленного двигателя 512 в качестве противодействующей силы для увеличения оборотов Ne двигателя, передается первой кольцевой шестерне R1 («ВЫХОД»), соединенной с ведущими колесами 516, при этом возникает падение приводного крутящего момента. Напротив, толчок во время запуска двигателя уменьшается путем выдачи крутящий момент Tmadd, который компенсирует падение приводного крутящего момента (именуемого также компенсирующим крутящим моментом) с использованием второй вращающейся электрической машины MG2. То есть при таком запуске двигателя, электронный блок 580 управления дополнительно заставляет вторую вращающуюся электрическую машину MG2 выдавать компенсирующий крутящий момент Tmadd в качестве крутящего момента отмены противодействующей силы. Состояние, показанное на фиг. 61, возникает во время переходного процесса при запуске двигателя, то есть обороты Ne двигателя возрастают. Во время режима привода ЭТС вращение каждого из вращающихся элементов первого планетарного зубчатого механизма 850, которые вращаются как одно целое в результате включения сцепления С1 и обозначены штриховой линией, устанавливается на ноль. Когда действует торможение двигателем, обороты Ne двигателя увеличиваются, как в случае состояния, показанного на фиг. 61.
[0366] На фиг. 61 величина пробелов между смежными линиями среди вертикальных линий Y1 - Y4 составляет 1:λ:λ, как показано на чертеже. Каждая «λ» во втором члене уравнения и третьем члене уравнения вычисляется на основе передаточного числа (= число зубьев солнечной шестерни/число зубьев кольцевой шестерни) каждого планетарного зубчатого механизма 848, 850, и не всегда является одной и той же величиной. В настоящем варианте осуществления каждая «λ» во втором члене уравнения и третьем члене уравнения принимается за одинаковую величину для удобства. При запуске двигателя, как показано также на фиг. 61, поскольку сцепление С1 находится в состоянии сцеплено, вращающиеся элементы первого планетарного зубчатого механизма 850, обозначенного штриховой линией, вращаются как одно целое. В этом состоянии, когда положительный крутящий момент Tg выдается из первой вращающейся электрической машины MG1, скорость вращения двигателя 512, соединенного со второй солнечной шестерней S2 первого планетарного зубчатого механизма 850, увеличивается. При запуске двигателя крутящий момент Ted, передаваемый на первую кольцевую шестерню R1 («ВЫХОД»), составляет 1/(1 + λ)×Те. По этой причине компенсирующий крутящий момент Tmadd, который компенсирует падение приводного крутящего момента в первой кольцевой шестерне R1 («ВЫХОД»), составляет 1/(1 + λ)×Те. Это происходит благодаря той же причине, что и явлении, что прямой крутящий момент двигателя в режиме ПОВ/П для ГТС (движение вперед) уменьшается по сравнению с крутящим моментом Те двигателя, как описано выше. Здесь при вычислениях величины инерции опущены.
[0367] В этой связи, поскольку компенсирующий крутящий момент Tmadd равен величине возрастания при крутящем моменте второй вращающейся электрической машины MG2, если двигатель 512 запускается в состоянии, когда вторая вращающаяся электрическая машина MG2 уже выдала большой крутящий момент Tm машины MG2, имеется вероятность того, что нельзя обеспечить требуемый компенсирующий крутящий момент Tmadd. При этом имеется озабоченность, что вторая вращающаяся электрическая машина MG2 не может в достаточной степени компенсировать падение приводного крутящего момента и, в результате, невозможно уменьшить толчок во время запуска двигателя.
[0368] Когда электронный блок 580 управления запускает двигатель 512 в режиме ЭТС с одним электрическим двигателем, электронный блок 580 управления переводит сцепление CR из расцепленного состояния в сцепленное состояние в состоянии, в котором сцепление С1 сцеплено, и заставляет первую вращающуюся электрическую машину MG1 выдавать компенсирующий крутящий момент Tmadd. В дополнение к сцепленному состоянию сцепления С1, когда предельная нагрузка по крутящему моменту (далее именуемого крутящим моментом Tcr сцепления CR) генерируется в сцеплении CR, состояние переключается в состояние режима фиксированной передачи с прямым соединением, где сцепление С1 и сцепление CR оба включены (см. фиг. 59), при этом можно увеличить обороты Ne двигателя без генерирования крутящего момента Tg машины MG1 (положительный крутящий момент). Такой запуск двигателя путем генерирования крутящего момента Tcr сцепления CR в сцеплении CR не использует крутящий момент Tg машины MG1 (положительный крутящий момент), но при этом можно использовать крутящий момент Tg машины MG1 (отрицательный крутящий момент), чтобы создать компенсирующий крутящий момент Tmadd. Таким образом, когда двигатель 512 запускается, можно легко компенсировать падение приводного крутящего момента. Поскольку второй вращающейся электрической машине MG2 не нужно оставлять компенсирующий крутящий момент Tmadd без использования для режима привода ЭТС, поскольку первая вращающаяся электрическая машина MG1 способна выдавать компенсирующий крутящий момент Tmadd, область, в котором режим привода ЭТС выполняется с использованием второй вращающейся электрической машины MG2 (то есть область режима ЭТС с одним электрическим двигателем), расширяется.
[0369] На фиг. 62 представлена схема, которая иллюстрирует пример случая, когда двигатель 512 запускается путем увеличения оборотов Ne двигателя с помощью переключения сцепления CR из расцепленного состояния в сцепленное состоянию в состоянии, когда сцепление С1 сцеплено, в режиме ЭТС с одним электрическим двигателем, и первая вращающаяся электрическая машина MG1 должна выдавать компенсирующий крутящий момент Tmadd со ссылкой на такую же номограмму, что и на фиг. 61. На фиг. 35 представлена диаграмма, которая иллюстрирует крутящий момент Tcr сцепления CR, требуемый для генерирования в сцеплении CR (далее требуемый крутящий момент Tcrn сцепления CR) в случае, когда первая вращающаяся электрическая машина MG1 выдает компенсирующий крутящий момент Tmadd.
[0370] На фиг. 62, поскольку сцепление С1 находится в состоянии сцеплено, вращающиеся элементы первого планетарного зубчатого механизма 850, обозначенные штриховой линией, вращаются как одно целое. В этом состоянии вращение двигателя 512, соединенного со второй солнечной шестерней S2 первого планетарного зубчатого механизма 850, увеличивается путем генерирования крутящего момента Tcr сцепления CR в сцеплении CR в результате перевода сцепления CR из расцепленного состояния в сцепленное состояние. При запуске двигателя сцепление CR находится в состоянии проскальзывания, однако, крутящий момент Tcr сцепления CR генерируется для увеличения оборотов Ne двигателя, при этом крутящий момент Ted, передаваемый на первую кольцевую шестерню R1 («ВЫХОД»), представляет собой втягивающий крутящий момент Те двигателя.
[0371] Кроме того, при запуске двигателя путем генерирования CR крутящего момента Tcr в сцеплении CR компенсирующий крутящий момент Tmadd генерируется путем использования крутящего момента Tg машины MG1 (отрицательный крутящий момент). Крутящий момент Tg машины MG1 (отрицательный крутящий момент) добавляет крутящий момент (этот крутящий момент обозначен как Tgd) для компенсации падения приводного крутящего момента на первой кольцевой шестерне R1 («ВЫХОД»). С другой стороны, крутящий момент Tg машины MG1 (отрицательный крутящий момент) добавляет крутящий момент (этот крутящий момент обозначен как Tgdd) в направлении снижения оборотов Ne двигателя к первому планетарному зубчатому механизму 850, который обозначен штриховой линией и вращаются как одно целое, поскольку сцепление С1 находится в состоянии сцеплено. Поэтому крутящий момент, который воздействует на первую кольцевую шестерню R1 («ВЫХОД») в то время, когда генерируется крутящий момент Tcr сцепления CR для увеличения оборотов Ne двигателя, равен [Tgd - |Те + Tgdd|]. Когда считается, что состояние, в котором генерируется крутящий момент Tcr сцепления CR в дополнение к включенному состоянию сцепления С1, эквивалентно состоянию режима фиксированной передачи с прямым соединением (см. фиг. 59), в котором и сцепление С1, и сцепление CR включены, абсолютная величина крутящего момента Tg ЭГ1 (отрицательного крутящего момента) составляет [Tgd - |Tgdd|]. По этой причине крутящий момент, который воздействует на первую кольцевую шестерню R1 («ВЫХОД»), равен [|Tg| - |Те|]. Таким образом, когда первая вращающаяся электрическая машина MG1 выдает, по меньшей мере, крутящий момент, соответствующий втягивающему крутящему моменту Те двигателя, в качестве крутящего момента Tg машины MG1 (отрицательный крутящий момент), можно компенсировать падение приводного крутящего момента. Здесь при вычислениях величины инерции опущены.
[0372] В качестве условия, что можно увеличить обороты Ne двигателя путем генерирования крутящего момента Tcr сцепления CR, по меньшей мере, крутящий момент Tcr сцепления CR, соответствующий крутящему моменту Tgdd, который добавляется к первому планетарному зубчатому механизму 850, с использованием крутящего момента Tg машины MG1 (отрицательный крутящий момент), требуется в дополнение к втягивающему крутящему моменту Те двигателя. Таким образом, требуемый крутящий момент Tcm сцепления CR представляет собой крутящий момент, который превышает [|Те + Tgdd|]. Крутящий момент Tgdd равен [(1 + λ)/λ×Tg], при этом требуемый CR крутящий момент Tcm, с помощью которого увеличиваются обороты Ne двигателя, представляет собой крутящий момент, который превышает крутящий момент (= |Те + (1 + λ)/λ×Tg|), как обозначено сплошной линией на фиг. 35. Здесь при вычислениях величины инерции опущены.
[0373] Как описано со ссылкой на фиг. 62 и фиг. 35, даже когда вторая вращающаяся электрическая машина MG2 не выдает часть компенсирующего крутящего момента Tmadd, однако когда первая вращающаяся электрическая машина MG1 выдает крутящий момент Tg машины MG1 (отрицательный крутящий момент), соответствующий втягивающему крутящему моменту Те двигателя, можно обеспечить компенсирующий крутящий момент Tmadd. Поэтому область режима ЭТС с одним электрическим двигателем может устанавливаться на основе максимального крутящего момента второй вращающейся электрической машины MG2, при этом можно расширить область режима привода ЭТС за пределы области режима ЭТС с одним электрическим двигателем, который устанавливается на основе крутящего момента, полученного путем вычитания компенсирующего крутящего момента Tmadd из максимального крутящего момента второй вращающейся электрической машины MG2.
[0374] Когда абсолютная величина крутящего момента Tg машины MG1 (отрицательный крутящий момент) возрастает, требуемый крутящий момент Tcm сцепления CR также увеличивается. Кроме того, при запуске двигателя путем генерирования крутящего момента Tcr сцепления CR, сцепление CR находится в состоянии проскальзывания, при этом имеется вероятность того, что возникнут тепловые проблемы. По этой причине желательно установить верхнюю предельную величину абсолютной величины крутящего момента Tg машины MG1 (отрицательный крутящий момент) с учетом возможной величины в качестве крутящего момента Tcr сцепления CR.
[0375] Когда первая вращающаяся электрическая машина MG1 выдает крутящий момент Tg машины MG1 (отрицательный крутящий момент), который превышает компенсирующий крутящий момент Tmadd, можно произвести ускорение, одновременно запуская двигатель, путем увеличения приводного крутящего момента.
[0376] Чтобы реализовать вышеописанное управление запуском двигателя, электронный блок 580 управления дополнительно включает в себя средство определения условия, то есть блок 586 определения условия, средство запуска управления, то есть блок 588 запуска управления, и средство управления компенсацией крутящего момента, то есть блок 589 управления компенсацией крутящего момента.
[0377] Когда при запуске двигателя путем генерирования крутящего момента Tg машины MG1 (положительный крутящий момент) (см. фиг. 61), блок 586 определения условия определяет, действительно ли вторая вращающаяся электрическая машина MG2 способна создать требуемый компенсирующий крутящий момент Tmadd. Например, блок 586 определения условия определяет, действительно ли крутящий момент, полученный путем вычитания крутящего момента Tm машины MG2, который соответствует требуемому приводному крутящему моменту, и который в текущий момент выдается из второй вращающейся электрической машины MG2, из крутящего момента Tm машины MG2, который в текущий момент выдается из второй вращающейся электрической машины MG2, недостаточен для компенсации крутящего момента Tmadd во время режима привода ЭТС в режиме ЭТС с одним электрическим двигателем. Компенсирующий крутящий момент Tmadd равен [1/(1 + λ)×Те], как описано выше. Втягивающий крутящий момент Те двигателя вычисляется, например, на основе ускорения при возрастании скорости вращения во время запуска двигателя, требований очистки выхлопных газов и пр.
[0378] Во время запуска двигателя 512, когда блок 586 определения условия определяет, что компенсирующий крутящий момент Tmadd при запуске двигателя путем генерирования крутящего момента Tg машины MG1 (положительный крутящий момент) не является достаточным, блок 588 запуска управления, например, запускает двигатель 512, заставляя первую вращающуюся электрическую машину MG1 выдавать крутящий момент Tg машины MG1 (положительный крутящий момент) в состоянии, когда сцепление С1 находится в состоянии расцеплено, и воспламеняет топливо, увеличивая при этом обороты Ne двигателя (см. фиг. 61).
[0379] Во время запуска двигателя 512, когда блок 586 определения условия определяет, что компенсирующий крутящий момент Tmadd при запуске двигателя путем генерирования крутящего момента Tg машины MG1 (положительный крутящий момент) не является достаточным, блок 588 запуска управления запускает двигатель 512 путем приведения сцепления CR из расцепленного состояния в зацепленное состояние в состоянии, когда сцепление С1 находится в состоянии сцеплено, и путем воспламенения топлива, увеличивая при этом обороты Ne двигателя (см. фиг. 62).
[0380] При запуске двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние, либо первая вращающаяся электрическая машина MG1, либо вторая вращающаяся электрическая машина MG2 способна генерировать компенсирующий крутящий момент Tmadd. То есть, когда двигатель 512 запускается, блок 589 управления компенсацией крутящего момента способен выдавать крутящий момент из каждой машины - первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2, при этом падение приводного крутящего момента уменьшается. При компенсации падения приводного крутящего момента с использованием второй вращающейся электрической машины MG2, компенсирующий крутящий момент Tmadd может воздействовать непосредственно на ведущие колеса 516, при этом относительно легко управлять величиной компенсирующего крутящего момента Tmadd. С другой стороны, при компенсации падения приводного крутящего момента с использованием первой вращающейся электрической машины MG1, противодействующий крутящий момент создается сцеплением CR, приводимым из расцепленного состояния в сцепленное состояние в состоянии проскальзывания, при этом относительно трудно управлять величиной компенсирующего крутящего момента Tmadd, который воздействует на ведущее колесо 516. По этой причине блок 589 управления компенсацией крутящего момента заставляет первую вращающуюся электрическую машину MG1 выдавать крутящий момент, на величину которого крутящий момент Tm MG2 недостаточен для крутящего момента, для уменьшения падения приводного крутящего момента, так, что компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, выдается, отдавая предпочтение перед компенсирующим крутящим моментом Tmadd, который генерируется первой вращающейся электрической машиной MG1. То есть первая вращающаяся электрическая машина MG1 обеспечивает недостаточную величину компенсирующего крутящего момента Tmadd, выдавая крутящий момент Tg машины MG1 (отрицательный крутящий момент).
[0381] Более конкретно, когда блок 588 запуска управления запускает двигатель 512 путем приведения сцепления CR из расцепленного состояния в сцепленное состояние, блок 589 управления компенсацией крутящего момента реализует участие MG1, чтобы заставить первую вращающуюся электрическую машину MG, генерировать компенсирующий крутящий момент Tmadd. При участии MG1 блок 589 управления компенсацией крутящего момента выдает крутящий момент Tg машины MG1 (отрицательный крутящий момент) из первой вращающейся электрической машины MG1, при этом падение приводного крутящего момента уменьшается.
[0382] При запуске двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние, крутящий момент Ted, который передается первой кольцевой шестерне R1 («ВХОД»), представляет собой втягивающий крутящий момент Те двигателя, как описано выше. Поэтому при таком запуске двигателя, когда компенсирующий крутящий момент Tmadd не обеспечивается путем использования крутящего момента Tg машины MG1 (отрицательный крутящий момент), компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, равен [-Те]. Поэтому крутящий момент Tg машины MG1 (отрицательный крутящий момент) при участии MG1 представляет собой крутящий момент, на величину которого крутящий момент Tm MG2 недостаточен для компенсации крутящего момента Tmadd (= -Те). То есть крутящий момент Tg машины MG1 (отрицательный крутящий момент) представляет собой крутящий момент, в котором крутящий момент, полученный путем вычитания крутящего момента Tm машины MG2, который соответствует требуемому приводному крутящему моменту, и который в текущий момент выдается из второй вращающейся электрической машины MG2, из крутящего момента Tm машины MG2, который в текущий момент выдается из второй вращающейся электрической машины MG2, недостаточен для компенсации крутящего момента Tmadd (= -Те). Когда вторая вращающаяся электрическая машина MG2 не способна выдавать часть компенсирующего крутящего момента Tmadd, или когда применен вариант осуществления изобретения, в котором вторая вращающаяся электрическая машина MG2 изначально не выдает компенсирующий крутящий момент Tmadd, блок 589 управления компенсацией крутящего момента выдает крутящий момент Tg машины MG1 (отрицательный крутящий момент) из первой вращающейся электрической машины MG1, при этом падение приводного крутящего момента уменьшается с использованием только первой вращающейся электрической машины MG1.
[0383] Когда нагрузка транспортного средства (например, требуемый приводной крутящий момент) уменьшается, крутящий момент Tm машины MG2, который используется для приведения в движение транспортного средства 810, уменьшается, при этом запас крутящего момента Tm машины MG2, который может использоваться для компенсирующего крутящего момента Tmadd, соответственно возрастает. Как описано выше, желательно использовать крутящий момент Tm машины MG2 для компенсирующего крутящего момента Tmadd, отдавая предпочтение перед крутящим моментом Tg машины MG1 (отрицательный крутящий момент). Поэтому блок 589 управления компенсацией крутящего момента уменьшает абсолютную величину крутящего момента Tg машины MG1 (отрицательный крутящий момент), который выдается из первой вращающейся электрической машины MG1, когда нагрузка транспортного средства уменьшается.
[0384] Компенсирующий крутящий момент Tmadd, который генерируется первой вращающейся электрической машиной MG1, действует в направлении снижения скорости вращения второй кольцевой шестерни R2 (то есть вращающихся элементов первого дифференциала 846, которые вращаются как одно целое из-за включенного сцепления С1), соединенной с первым водилом СА1 (то есть действует в качестве противодействующего крутящего момента на сцепление CR из расцепленного состояния в направлении сцепленного состояния). По этой причине блок 589 управления компенсацией крутящего момента устанавливает абсолютную величину крутящего момента Tg машины MG1 (отрицательный крутящий момент), который выдается из первой вращающейся электрической машины MG1 на заданную величину или меньше ее. Заданная величина устанавливается на основе крутящего момента Tcr сцепления CR, который может генерироваться на основе, например, тепловой нагрузки, и пр.,. и крутящего момента [(= |Те + (1 + λ)/λ×Tg|)], обозначенного сплошной линией на фиг. 35.
[0385] При запуске двигателя путем приведения сцепления CR из расцепленного состояния в сцепленное состояние изменение оборотов Ne двигателя имеет тенденцию к флуктуации по отношению к целевой величине, при этом имеется вероятность того, что ухудшится стабильность сгорания в двигателе 512. Обороты Ne двигателя подвергаются управлению с обратной связью с использованием крутящего момента Tg машины MG1, временная константа которого меньше, чем у гидравлического давления Pcr сцепления CR, для управления сцеплением CR. То есть, когда двигатель 512 запускается, блок 589 управления компенсацией крутящего момента выдает крутящий момент Tg машины MG1 из первой вращающейся электрической машины MG1 во время управления с обратной связью, при этом обороты Ne двигателя изменяются вблизи целевой величины.
[0386] Когда температура THoil рабочего масла для управления сцеплением CR низка, имеется вероятность того, что приемистость (что является синонимом управляемость) сцепления CR уменьшается из-за высокой вязкости рабочего масла. Когда температура THoil рабочего масла высока, имеется вероятность того, что приемистость сцепления CR уменьшается из-за утечки рабочего масла из зазоров и пр., клапанов (соленоидного клапана, клапана регулировки давления, и пр., расположенных в гидравлическом контуре 554 управления), связанных с подачей гидравлического давления на сцепление CR. Когда приемистость сцепления CR низка, приемистость запуска двигателя может упасть. В таком случае, хотя компенсирующий крутящий момент Tmadd является недостаточным, более предпочтительно запускать двигатель путем генерирования крутящего момента Tg машины MG1 (положительный крутящий момент), чем запускать двигатель путем переключения сцепления CR из расцепленного состояния в сцепленное состояние. То есть, даже когда невозможно уменьшить падение приводного крутящего момента, обеспечению приемистости запуска двигателя придается более высокий приоритет.
[0387] Более конкретно, во время запуска двигателя 512, когда блок 586 определения условия определяет, что компенсирующий крутящий момент Tmadd при запуске двигателя путем генерирования крутящего момента Tg машины MG1 (положительный крутящий момент) не является достаточным, блок 586 определения условия определяет, что приемистость (управляемость) во время управления сцеплением CR высокая или низкая на основе температуры THoil рабочего масла для управления сцеплением CR. Блок 586 определения условия определяет, действительно ли приемистость во время управления сцеплением CR высокая или низкая на основе того, выше ли температура THoil рабочего масла заданной температуры масла. Заданная температура масла, имеющая, например, пороговое значение, определяется заранее для определения того, что вязкость рабочего масла низкая до такой степени, что обеспечивается приемистость сцепления CR. Другими словами, блок 586 определения условия определяет, действительно ли приемистость для управления сцеплением CR высокая или низкая на основе того, является ли температура THoil рабочего масла ниже второй заданной температуры масла. Вторая заданная температура масла имеет, например, величину, которая больше, чем заданная температура масла, и представляет собой порог, определяемый заранее для определения того, что утечка рабочего масла из клапанов уменьшается до такой степени, что обеспечивается приемистость сцепления CR.
[0388] Когда блок 586 определения условия определяет, что приемистость для управления сцеплением CR высокая, блок 588 запуска управления выполняет управление запуском двигателя (именуемого также запуском двигателя с включением сцепления CR) для переключения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 включено. С другой стороны, когда блок 586 определения условия определяет, что реакция для управления сцеплением CR низкая, блок 588 запуска управления выполняет управление запуском двигателя (именуемого также обычным запуском двигателя) для увеличения оборотов Ne двигателя с использованием первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено, а сцепление CR находится в состоянии расцеплено.
[0389] На фиг. 63 представлена собой блок-схему, которая иллюстрирует соответствующий участок операций управления электронного блока 580 управления, то есть операции управления для легкой компенсации падения приводного крутящего момента во время запуска двигателя 512. Эта блок-схема, например, реализуется тогда, когда делается определение на запуск двигателя во время режима привода ЭТС. На фиг. 64 представлена схема, на которой показан пример временной диаграммы в случае, когда выполняются операции управления, показанные на блок-схеме на фиг. 63.
[0390] На фиг. 63, сначала, на этапе (далее слово этап опущено) S10, соответствующем функции блока 586 определения условия, определяется, действительно ли компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, является недостаточным в случае, когда выполняется обычный запуск двигателя. Когда делается утвердительное определение на S10, определяется на S20, соответствующем функции блока 586 определения условия, действительно ли приемистость для переключения сцепления CR высокая на основе того, выше ли температура THoil рабочего масла, чем заданная температура масла. Например, действительно ли приемистость для управления сцеплением CR высокая, может быть определено на основе того, ниже ли температура THoil рабочего масла, чем вторая заданная температура масла (> заданная температура масла). Когда делается утвердительное определение на S20, выбирается запуск двигателя с включением сцепления CR и выполнение участия машины MG1 (то есть с помощью MG1), выбирается на S30, соответствующем функциям блока 588 запуска управления и блока 589 управления компенсацией крутящего момента. Вслед за S30 двигатель 512 запускается путем приведения сцепления CR из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 находится в состоянии сцеплено, и путем воспламенения топлива, увеличивая при этом обороты Ne двигателя. При запуске двигателя компенсирующий крутящий момент Tmadd выдается из первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2. Крутящий момент Tg машины MG1 (отрицательный крутящий момент) выдается с помощью MG1 в качестве крутящего момента, на величину которого крутящий момент Tm машины MG2 является недостаточным для требуемого компенсирующего крутящего момента Tmadd (см. фиг. 62). С другой стороны, когда делается отрицательное определение на S10 или когда делается отрицательное определение на S20, обычный запуск двигателя выбирается на S40, соответствующем функции блока 588 запуска управления. Вслед за S40 двигатель 512 запускается, выдавая крутящий момент Tg машины MG1 (положительный крутящий момент) из первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено, и воспламеняя топливо, увеличивая при этом обороты Ne двигателя (см. фиг. 61).
[0391] На фиг. 64 показан случай, где запуск двигателя с включением сцепления CR производится из состояния, в котором транспортное средство 810 выполняет режим привода ЭТС при постоянной величине хода педали акселератора. На фиг. 64 во время режима привода ЭТС, в котором работа двигателя 512 остановлена в состоянии режима ЭТС с одним электрическим двигателем, в котором сцепление С1 находится в состоянии сцеплено (см. дополнительное использование торможения двигателем на фиг. 52), или установлен режим ПОВ/П для ГТС (движение вперед), величина перемещения θacc акселератора начинает возрастать (см. момент t1 времени). Соответственно, требуемый приводной крутящий момент возрастает, при этом крутящий момент Tm машины MG2 также возрастает, положительная электрическая мощность (то есть электрическая энергия разрядки аккумулятора) из электрической энергии (именуемой также аккумуляторной электрической энергией) аккумуляторного блока 520 также пропорционально возрастает (см. момент t1 времени - момент t4 времени). После чего, в результате того факта, что величина перемещения θасс акселератора возросла, делается определение на запуск двигателя (см. момент t3 времени). Таким образом, крутящий момент Tcr сцепления С1 генерируется в сцеплении CR. Командная величина гидравлического давления для подачи гидравлического давления Pcr сцепления CR может выдаваться от момента времени, в который делается определение на запуск двигателя, или, чтобы улучшить приемистость для включения сцепления CR, как показано в примере на фиг. 64, можно спрогнозировать запуск двигателя и затем запустить подготовку генерирования крутящего момента Tcr сцепления CR от момента времени, в который прогнозируется запуск двигателя. Например, пороговое значение, при котором прогнозируется запуск двигателя, устанавливается для величины перемещения θacc акселератора, которая ниже порогового значения, при который делается определение на запуск двигателя. Момент t2 времени обозначает, что подготовка генерирования крутящего момента Tcr сцепления CR запускается, поскольку величина перемещения θасс акселератора достигла порогового значения, при котором прогнозируется запуск двигателя. При подготовке генерирования крутящего момента Tcr сцепления CR сначала временное высокое гидравлическое давление для смещения клапана регулировки давления, который подает гидравлическое давление Pcr сцепления CR, выдается в качестве командной величины гидравлического давления гидравлического давления Pcr сцепления CR и, после чего, выдается постоянное давление холостого хода для смещения поршня сцепления CR (см. момент t2 времени - момент t3 времени). Постоянное давление холостого хода не является таковым для смещения поршня до выполнения так называемого уплотнения для выполнения уплотнения зазора между фрикционными материалами сцепления CR. В примере на фиг. 64 после прогнозирования запуска двигателя величина перемещения θасс акселератора возросла, при этом делается определение на запуск двигателя, и командная величина гидравлического давления для гидравлического давления Pcr сцепления CR для генерирования крутящего момента Tcr сцепления CR начинает выдаваться (см. момент t3 времени). При выдаче командной величины гидравлического давления сначала выдается временное высокое гидравлическое давление для уплотнения сцепления CR и, после чего, выдается постоянное давление холостого хода (см. момент t3 времени - момент t6 времени). Когда крутящий момент Tcr сцепления CR фактически начинает генерироваться в результате выдачи командной величины гидравлического давления гидравлического давления Pcr сцепления CR для генерирования крутящего момента Tcr сцепления С1, обороты Ne двигателя начинают возрастать (см. момент t5 времени). При обнаружении возрастания оборотов Ne двигателя, крутящий момент Tm машины MG2 увеличивается, и крутящий момент Tg машины MG1 (отрицательный крутящий момент) выдается для выдачи компенсирующего крутящего момента Tmadd (см. момент t5 времени - момент t6 времени). Поскольку каждая из вращающихся электрических машин MG1, MG2 включает в себя синусо-косинусный вращающийся трансформатор, начало возрастания оборотов Ne двигателя может быть с точностью определено на основе скорости Ng вращения MG1 и скорости Nm вращения MG2. Путем использования определения начала такого возрастания оборотов Ne двигателя зависимость между крутящим моментом Tcr сцепления CR и командной величиной гидравлического давления для гидравлического давления Pcr сцепления CR для генерирования крутящего момента Tcr сцепления CR может быть распознана, и командная величина гидравлического давления для гидравлического давления Pcr сцепления CR, которое используется во время запуска двигателя, в следующий раз может быть скорректирована. В качестве альтернативного варианта командная величина гидравлического давления для гидравлического давления Pcr сцепления CR может быть скорректирована путем использования гидравлического давления Pcr сцепления CR, определенного датчиком 574 гидравлического давления CR или ходом поршня, определенного датчиком хода поршня в сцеплении CR. Когда обороты Ne двигателя начинают возрастать, управление с обратной связью выполняется с использованием первой вращающейся электрической машины MG1, при этом достигается нужная траектория возрастания оборотов двигателя. Поскольку приемистость первой вращающейся электрической машины MG1 выше, чем CR гидравлическое давление Pcr, повышается отслеживаемость цели. Поскольку приводной крутящий момент колеблется из-за флуктуаций крутящего момента Tg машины MG1 (отрицательный крутящий момент), то при управлении с обратной связью, флуктуации снимаются крутящим моментом Tm машины MG2 (см. момент t5 времени - момент t6 времени). Когда обороты Ne двигателя достигают заданной скорости вращения, в двигателе 512 происходит зажигание (см. момент t6 времени). С возрастанием крутящего момента Те двигателя после зажигания командная величина гидравлического давления для уменьшения гидравлического давления Pcr сцепления CR выдается при подготовке привода от двигателя после этого (см. момент t6 времени - момент t8 времени). После зажигания определяется, действительно ли двигатель 512 выполнил полное сгорание (см. момент t7 времени), и, когда сгорание становится устойчивым, крутящий момент Те двигателя увеличивается (см. момент t8 времени и позже). Поскольку режим привода меняется на привод от двигателя, использующий мощность двигателя Ре в качестве основного источника мощности, аккумуляторная электрическая энергия, которая используется, чтобы придать движение транспортному средству 810, уменьшается (см. момент t8 времени - момент t9 времени).
[0392] Как описано выше, согласно настоящему варианту осуществления изобретения, когда двигатель 512 запускается, не выдается крутящий момент Tg машины MG1 (положительный крутящий момент), который используется для запуска двигателя 512 в состоянии, когда сцепление С1 находится в состоянии сцеплено, сцепление CR находится в состоянии расцеплено, а сцепление CR приводится из расцепленного состояния в сцепленное состояние в состоянии, когда сцепление С1 находится в состоянии сцеплено, и крутящий момент Tg машины MG1 (отрицательный крутящий момент) выдается таким образом, что падение приводного крутящего момента уменьшается, при этом можно генерировать компенсирующий крутящий момент Tmadd с использованием первой вращающейся электрической машины MG1. Таким образом, когда двигатель 512 запускается, можно легко компенсировать падение приводного крутящего момента. Таким образом, например, когда компенсирующий крутящий момент Tmadd целиком вырабатывается второй вращающейся электрической машиной MG2, можно расширить область привода с помощью электрического двигателя от второй вращающейся электрической машины MG2, что определяется таким образом, что при этом резервируется компенсирующий крутящий момент Tmadd.
[0393] Согласно настоящему варианту осуществления изобретения, когда двигатель 512 запускается, крутящий момент выдается из каждой машины - первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2, при этом падение приводного крутящего момента уменьшается, притом можно генерировать компенсирующий крутящий момент Tmadd с использованием и первой вращающейся электрической машины ЭГ1, и второй вращающейся электрической машины ЭГ2. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0394] Согласно настоящему варианту осуществления изобретения, поскольку абсолютная величина крутящего момента Tg машины MG1 (отрицательный крутящий момент) устанавливается на заданную величину или меньшую, можно достичь и возрастания оборотов Ne двигателя с использованием сцепления CR, и компенсации падения приводного крутящего момента с использованием первой вращающейся электрической машины MG1.
[0395] Согласно настоящему варианту осуществления изобретения, поскольку абсолютная величина крутящего момента Tg машины MG1 (отрицательный крутящий момент) уменьшается, когда нагрузка транспортного средства уменьшается, то есть запас крутящего момента Tm машины MG2 соответственно возрастает, компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, увеличивается, при этом можно стабильно компенсировать падение приводного крутящего момента. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0396] Согласно настоящему варианту осуществления изобретения, поскольку крутящий момент, на величину которого крутящий момент Tm машины MG2 недостаточен для крутящего момента для уменьшения падения приводного крутящего момента, выдается из первой вращающейся электрической машины MG1, компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, выдается, отдавая предпочтение перед компенсирующим крутящим моментом Tmadd, который генерируется первой вращающейся электрической машиной MG1, при этом можно стабильно компенсировать падение приводного крутящего момента. Таким образом, легко уменьшить толчок во время запуска двигателя.
[0397] Согласно настоящему варианту осуществления изобретения, когда двигатель 512 запускается, крутящий момент Tg машины MG1 выдается во время управления с обратной связью, при этом обороты Ne двигателя изменяются вблизи целевой величины, притом можно уменьшить колебания оборотов Ne двигателя с использованием первой вращающейся электрической машины MG1, имеющей более быструю приемистость, чем работа сцепления CR. Таким образом, легко обеспечить стабильность сгорания в двигателе 512.
[0398] Согласно настоящему варианту осуществления изобретения, когда приемистость во время управления сцеплением CR низкая, выполняется управление запуском двигателя для увеличения оборотов Ne двигателя с использованием первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено, и сцепление CR находится в состоянии расцеплено, при этом можно обеспечить приемистость во время запуска двигателя 512.
[0399] Согласно настоящему варианту осуществления изобретения, действительно ли приемистость во время управления сцеплением CR высокая или низкая, определяется на основе температуры THoil рабочего масла для управления сцеплением CR, и, когда приемистость сцепления CR низкая, приемистость во время запуска двигателя 512 обеспечивается выполнением управления запуском двигателя с использованием первой вращающейся электрической машины MG1 для обеспечения плавного запуска двигателя 512.
[0400] Согласно настоящему варианту осуществления изобретения второй дифференциал 844 включает в себя одноступенчатый планетарный зубчатый механизм, в котором первая солнечная шестерня S1 представляет собой пятый вращающийся элемент RE5, первая кольцевая шестерня R1 является шестым вращающимся элементом RE6, а первое водило СА1 представляет собой четвертый вращающийся элемент RE4, при этом, когда дифференциальный статус второго дифференциала 844 управляется в состоянии, когда сцепление С1 находится в состоянии сцеплено, а сцепление CR находится в состоянии расцеплено, крутящий момент, уменьшенный по сравнению с крутящим моментом Те двигателя, механически передается на первую кольцевую шестерню R1.
[0401] Далее будет описан одиннадцатый вариант осуществления изобретения. В нижеследующем описании аналогичные ссылочные позиции обозначают участки, являющиеся общими для вариантов осуществления изобретения, и их описание опущено.
[0402] В вышеописанном десятом варианте осуществления изобретения, когда приемистость во время управления сцеплением CR высокая, выполняется запуск двигателя с включением сцепления CR, и крутящий момент Tg машины MG1 (отрицательный крутящий момент) выдается посредством участия машины MG1 для создания компенсирующего крутящего момента Tmadd. С другой стороны, когда приемистость во время управления сцеплением CR низкая, выполняется обычный запуск двигателя путем использования крутящего момента Tg машины MG1 (положительный крутящий момент). При обычном запуске двигателя, компенсирующий крутящий момент Tmadd создается путем использования только крутящего момента Tm машины MG2. Поэтому, когда приемистость во время управления сцеплением CR высокая, возможно уменьшить крутящий момент Tm машины MG2, который нужно зарезервировать (то есть крутящий момент Tm машины MG1, оставленный без использования в режиме привода ЭТС) для использования в качестве компенсирующего крутящего момента Tmadd во время запуска двигателя. В крайнем случае, в варианте осуществления изобретения, в котором компенсирующий крутящий момент Tmadd создается путем использования крутящего момента Tg машины MG1 (отрицательный крутящий момент), то не требуется резервировать крутящий момент Tm машины MG2 для использования в качестве компенсирующего крутящего момента Tmadd. С другой стороны, когда приемистость во время управления сцеплением CR низкая, стабильность сгорания во время запуска двигателя повышается посредством обычного запуска двигателя, при использовании крутящего момента Tg машины MG1 (положительный крутящий момент), однако компенсирующий крутящий момент Tmadd генерируется с использованием только второй вращающейся электрической машины MG2. Поэтому электронный блок 580 управления сужает область режима привода ЭТС, где транспортное средство 810 движется путем использования второй вращающейся электрической машины MG2 в качестве источника движущей силы в состоянии, когда работа двигателя 512 остановлена в случае, когда приемистость во время управления сцеплением CR низкая по сравнению со случаем, в котором приемистость во время управления сцеплением CR высокая.
[0403] В частности, когда блок 586 определения условия определяет, что приемистость во время управления сцеплением CR высокая, блок 582 гибридного управления выбирает (задает) первую ЭТС область в качестве области режима ЭТС с одним электрическим двигателем. С другой стороны, когда блок 586 определения условия определяет, что приемистость во время управления сцеплением CR низкая, блок 582 гибридного управления выбирает (задает) вторую ЭТС область в качестве области режима ЭТС с одним электрическим двигателем. Первая ЭТС область устанавливается при этом, например, таким образом, что область стороны высокой нагрузки транспортного средства является широкой (то есть требуемый приводной крутящий момент распространяется на область более высокого крутящего момента) по сравнению со второй ЭТС областью.
[0404] На фиг. 38 представлена блок-схема, которая иллюстрирует соответствующий участок операций управления электронного блока 580 управления, то есть операций управления для изменения ЭТС области на основе приемистости во время управления сцеплением CR. Блок-схема, например, периодически выполняется во время движения. На фиг. 38 она уже была описана в вышеописанном седьмом варианте осуществления изобретения, поэтому ее описание опущено.
[0405] Как описано выше, согласно настоящему варианту осуществления изобретения область режима привода ЭТС в случае, когда приемистость во время управления сцеплением CR низкая, уже, чем область режима привода ЭТ в случае, когда приемистость во время управления сцеплением CR высокая, при этом, во время запуска двигателя 512, запас крутящего момента Tm машины MG2 имеет тенденцию к резервированию (то есть компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, имеет тенденцию к резервированию).
[0406] На фиг. 65 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства 900, согласно двенадцатому варианту осуществления изобретения. На фиг. 65 транспортное средство 900 представляет собой гибридное транспортное средство, включающее в себя двигатель 512, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, систему 902 передачи мощности и ведущие колеса 516. Система 902 передачи мощности включает в себя первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2.
[0407] Система 902 передачи мощности расположена в контуре передачи мощности между двигателем 512 и ведущими колесами 516. Система 902 передачи мощности включает в себя первый блок 904 передачи мощности, второй блок 526 передачи мощности, ведомую шестерню 530, ведомый вал 532, шестерню 534 конечной передачи (которая имеет меньший диаметр, чем ведомая шестерня 530), шестерню 538 дифференциала, и пр. внутри корпуса 522. Ведомая шестерня 530 находится в зацеплении с ведущей шестерней 528. Ведущая шестерня 528 представляет собой выходной вращающийся элемент первого блока 904 передачи мощности. Ведомая шестерня 530 жестко прикреплена к ведомому валу 532 с тем, чтобы быть неповоротной относительно него. Шестерня 534 конечной передачи жестко прикреплена к ведомому валу 532 с тем, чтобы быть неповоротной относительно него. Шестерня 538 дифференциала находится в зацеплении с шестерней 534 конечной передачи через дифференциальную кольцевую шестерню 536. Система 902 передачи мощности включает в себя оси 540, соединенные с шестерней 538 дифференциала, и пр.
[0408] Первый блок 904 передачи мощности расположен коаксиально с входным валом 542, который представляет собой входной вращающийся элемент первого блока 904 передачи мощности, и включает в себя второй дифференциал 906, первый дифференциал 908 и сцепление CR. Второй дифференциал 906 включает в себя второй планетарный зубчатый механизм 848 (второй дифференциальный механизм) и первую вращающуюся электрическую машину MG1. Первый дифференциал 908 включает в себя первый планетарный зубчатый механизм 850 (первый дифференциальный механизм), сцепление С1 и тормоз В1.
[0409] Во втором дифференциале 906, первое водило СА1 представляет собой четвертый вращающийся элемент RE4, который представляет собой входной элемент, соединенный с выходным вращающимся элементом первого дифференциала 908 (то есть второе водило СА2 первого планетарного зубчатого механизма 850), и служит в качестве входного вращающегося элемента второго дифференциала 906. Первая солнечная шестерня S1 соединена как одно целое с валом 552 ротора первой вращающейся электрической машины MG1, и представляет собой пятый вращающийся элемент RE5, являющийся противодействующим элементом, с которым соединена первая вращающаяся электрическая машина MG1 так, что при этом передается мощность. Первая кольцевая шестерня R1 соединена как одно целое с ведущей шестерней 528 и является шестым вращающимся элементом RE6, который представляет собой выходной элемент, соединенный с ведущими колесами 516. Первая кольцевая шестерня R1 служит в качестве выходного вращающегося элемента второго дифференциала 906.
[0410] В первом дифференциале 908 вторая солнечная шестерня S2 представляет собой первый вращающийся элемент RE1, который соединен как одно целое с входным валом 542, и с которым двигатель 512 соединен через входной вал 542 так, что при этом передается мощность. Вторая солнечная шестерня S2 служит в качестве входного вращающегося элемента первого дифференциала 908. Вторая кольцевая шестерня R2 представляет собой третий вращающийся элемент RE3, селективно соединяемый с корпусом 522 через тормоз В1. Второе водило СА2 представляет собой второй вращающийся элемент RE2, соединенный с входным вращающимся элементом второго дифференциала 906 (то есть первым водилом СА1 второго планетарного зубчатого механизма 848). Второе водило СА2 служит в качестве выходного вращающегося элемента первого дифференциала 908. Вторая солнечная шестерня S2 и второе водило СА2 селективно соединяются друг с другом через сцепление С1. Первая солнечная шестерня S1 и вторая кольцевая шестерня R2 селективно соединяются друг с другом через сцепление CR. Таким образом, сцепление С1 представляет собой первое устройство сцепления, которое селективно соединяет первый вращающийся элемент RE1 со вторым вращающимся элементом RE2. Сцепление CR представляет собой второе устройство сцепления, которое селективно соединяет пятый вращающийся элемент RE5 с третьим вращающимся элементом RE3. Тормоз В1 представляет собой третье устройство сцепления, которое селективно соединяет третий вращающийся элемент RE3 с корпусом 522, который является невращающимся элементом.
[0411] Второй планетарный зубчатый механизм 848 способен служить в качестве механизма распределения мощности, который распределяет мощность двигателя 512, сообщенную на первое водило СА1, между первой вращающейся электрической машиной MG1 и первой кольцевой шестерней R1 в состоянии, когда относительное движение разрешено. Таким образом, второй дифференциал 906 служит в качестве известного дифференциала электрической машины (вариатора электрической машины). То есть второй дифференциал 906 представляет собой трансмиссионный механизм электрической машины, в котором дифференциальный статус второго планетарного зубчатого механизма 848 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1.
[0412] Первый дифференциал 908 способен устанавливать четыре состояния, то есть состояние прямого соединения, состояние понижающей передачи, нейтральное состояние и состояние внутренней блокировки путем изменения рабочих статусов сцепления С1 и тормоза В1. В частности, когда сцепление С1 находится в состоянии сцеплено, первый дифференциал 908 переходит в состояние прямого соединения, в котором вращающиеся элементы первого планетарного зубчатого механизма 850 вращаются как одно целое. Когда тормоз В1 сцеплен, первый дифференциал 908 переходит в состояние понижающей передачи, где скорость вращения второго водила СА2 уменьшается по сравнению с оборотами Ne двигателя. Когда сцепление С1 расцеплено и тормоз В1 расцеплен, первый дифференциал 908 переходит в нейтральное состояние, где относительное движение первого планетарного зубчатого механизма 850 разрешено. Когда сцепление С1 сцеплено и тормоз В1 сцеплен, первый дифференциал 908 переходит в состояние внутренней блокировки, где вращение каждого из вращающихся элементов первого планетарного зубчатого механизма 850 останавливается.
[0413] Первый блок 904 передачи мощности способен образовывать вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности во втором дифференциале 906. То есть в первом блоке 904 передачи мощности в дополнение к тому факту, что первое водило СА1 (четвертый вращающийся элемент RE4) соединено со вторым водилом СА2 (вторым вращающимся элементом RE2), первая солнечная шестерня S1 (пятый вращающийся элемент RE5) соединяется со второй кольцевой шестерней R2 (третьим вращающимся элементом RE3) путем включения сцепления CR. В результате, второй дифференциал 906 и первый дифференциал 908 образуют один дифференциальный механизм, второй дифференциал 906 и первый дифференциал 908 в целом могут служить в качестве вариатора электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности одного второго дифференциала 906.
[0414] В первом блоке 904 передачи мощности первый дифференциал 908 и второй дифференциал 906, которыми устанавливаются четыре состояния, соединены друг с другом, и транспортное средство 900 способно достичь множества режимов привода (описанных выше) синхронно с изменением рабочего статуса сцепления CR.
[0415] В выполненном таким образом первом блоке 904 передачи мощности мощность двигателя 512 и мощность первой вращающейся электрической машины MG1 передаются от ведущей шестерни 528 на ведомую шестерню 530. Поэтому двигатель 512 и первая вращающаяся электрическая машина MG1 соединяются с ведущими колесами 516 через первый блок 904 передачи мощности так, что при этом передается мощность.
[0416] Во втором блоке 526 передачи мощности, мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530 без прохождения через первый блок 904 передачи мощности. Поэтому вторая вращающаяся электрическая машина MG2 соединена с ведущими колесами 516 так, что при этом передается мощность без прохождения через первый блок 904 передачи мощности. То есть вторая вращающаяся электрическая машина MG2 представляет собой вращающуюся электрическую машину, соединенную с осями 540, которые являются выходными вращающимися элементами системы 902 передачи мощности так, что при этом передается мощность без прохождения через первый блок 904 передачи мощности.
[0417] Выполненная таким образом система 902 передачи мощности предпочтительно используется для переднеприводного (FF) транспортного средства. В системе 902 передачи мощности мощность двигателя 512, мощность первой вращающейся электрической машины MG1 или мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530 и последовательно передается от ведомой шестерни 530 на ведущие колеса 516 через шестерню 534 конечной передачи, шестерню 538 дифференциала, оси 540, и пр. В транспортном средстве 900 двигатель 512, первый блок 904 передачи мощности и первая вращающаяся электрическая машина MG1 расположены вдоль оси, отличной от оси, вдоль которой расположена вторая вращающаяся электрическая машина MG2 так, что при этом осевая длина уменьшается.
[0418] Транспортное средство 900 включает в себя электронный блок 580 управления, включающий в себя контроллер, который управляет устройствами, относящимися к движению. Транспортное средство 900 дополнительно включает в себя блок 518 управления мощностью, аккумуляторный блок 520, гидравлический контур 554 управления, механический масляный насос (не показан) и пр.
[0419] Режимы привода, которые могут выполняться транспортным средством 900, будут описаны со ссылкой на фиг. 66, и фиг. 67-74. На фиг. 66 представлена диаграмма работы сцепления, на которой показан рабочий статус каждого из узлов - сцепления С1, тормоза В1 и сцепления CR - в каждом режиме привода. Значок кружок, пропуск, значок треугольник, «G» и «М» на схеме на фиг. 66 такие же, что и на фиг. 52 согласно вышеописанному десятому варианту осуществления, поэтому их описание опущено. Как показано на фиг. 66, транспортное средство 900 способно селективно выполнять режим привода ЭТС и режим привода ГТС в качестве режима привода.
[0420] На фиг. 67-74 представлены номограммы, которые соответственно показывают скорости вращения вращающихся элементов RE1 - RE6 во втором планетарном зубчатом механизме 848 и первом планетарном зубчатом механизме 850. На этих номограммах вертикальные линии Y1 - Y4 обозначают скорости вращения вращающихся элементов. С левой стороны, если смотреть на лист, вертикальная линия Y1 обозначает скорость вращения первой солнечной шестерни S1, которая представляет собой пятый вращающийся элемент RE5, соединенный с первой вращающейся электрической машиной MG1, и скорость вращения второй кольцевой шестерни R2, которая представляет собой третий вращающийся элемент RE3, который селективно соединяется с корпусом 522 через тормоз В1, вертикальная линия Y2 обозначает скорость вращения первого водила СА1, которое представляет собой четвертый вращающийся элемент RE4, и скорость вращения второго водила СА2, которое представляет собой второй вращающийся элемент RE2, причем первое водило СА1 и второе водило СА2 соединены друг с другом, вертикальная линия Y3 обозначает скорость вращения первой кольцевой шестерни R1, которая является шестым вращающимся элементом RE6, соединенным с ведущей шестерней 528, и вертикальная линия Y4 обозначает скорость вращения второй солнечной шестерни S1, которая представляет собой первый вращающийся элемент RE1, соединенный с двигателем 512. Различные значки, то есть значок незакрашенный квадрат, значок незакрашенный кружок, значок незакрашенный ромб, значок закрашенный кружок, значок закрашенный ромб, стрелка, сцепление С1, непрерывная линия и пунктирная линия, такие же, что и на фиг. 53-60 вышеописанного десятого варианта осуществления, поэтому их описание опущено.
[0421] На фиг. 67 представлена номограмма в режиме ЭТ с одним электрическим двигателем. Как показано на фиг. 66, режим ЭТС с одним электрическим двигателем осуществляется в состоянии, когда и сцепление С1, и тормоз В1, и сцепление CR расцеплены. Блок 582 гибридного управления останавливает работу двигателя 512 и выдает крутящий момент Tm машины MG2, чтобы придать движение транспортному средству 900 от второй вращающейся электрической машины MG2. Фиг. 67 показывает случай в то время, когда транспортное средство 900 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении (то есть в направлении вращения первой кольцевой шестерни R1 в то время, когда транспортное средство 900 движется вперед), чтобы выдавать положительный крутящий момент. В то время, когда транспортное средство 900 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении в отличие от работы в то время, когда транспортное средство 900 движется вперед. Когда дополнительно используется торможение двигателем, как показано на фиг. 66, сцепление С1 или сцепление CR находится в состоянии сцеплено (см. дополнительно используемое торможение двигателем в режиме ЭТС с одним электрическим двигателем). Торможение двигателем может работать путем включения тормоза В1.
[0422] На фиг. 68 представлена номограмма в режиме ЭТС с двумя электрическими двигателями. Как показано на фиг. 66, режим ЭТС с двумя электрическими двигателями осуществляется в состоянии, когда сцепление С1 и тормоз В1 включены, а сцепление CR находится в состоянии расцеплено. Блок 582 гибридного управления останавливает работу двигателя 512, и заставляет первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 выдавать крутящий момент Tg машины MG1 и крутящий момент Tm машины MG2, чтобы придать движение транспортному средству 900. На фиг. 68 показан случай в то время, когда транспортное средство 900 движется вперед в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в положительном направлении, чтобы выдавать положительный крутящий момент, и первая вращающаяся электрическая машина MG1 вращается в отрицательном направлении для выдачи отрицательного крутящего момента. В то время, когда транспортное средство 900 движется назад, первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 вращаются в противоположном направлении в отличие от работы в то время, когда транспортное средство 900 движется вперед.
[0423] На фиг. 69 представлена номограмма в то время, когда транспортное средство 900 движется вперед в режиме ПОВ/П для ГТС в режиме привода ГТС, и показывает случай переключения на низкую передачу, где скорость вращения Ne двигателя уменьшается по скорости и сообщается компонентам, которые осуществляют функции электрического вариатора электрической машины. На фиг. 70 представлена номограмма в то время, когда транспортное средство 900 движется вперед в режиме ПОВ/П для ГТС в режиме привода ГТС, и показывает случай переключения на высокоскоростную передачу, где обороты Ne двигателя сообщаются при постоянной скорости компонентам, которые осуществляют функции вариатора электрической машины. На фиг. 71 представлена номограмма в то время, когда транспортное средство 900 движется назад в режиме ПОВ/П для ГТС в режиме привода ГТС, и показывает случай переключения на высокоскоростную передачу, где обороты Ne двигателя сообщаются при постоянной скорости компонентам, которые осуществляют функции электрического вариатора электрической машины. Как показано на фиг. 66, переключение на пониженную передачу в режиме ПОВ/П для ГТС (далее именуемом режимом ПОВ/П ГТ Lo) осуществляется в состоянии, когда тормоз В1 находится в состоянии сцеплено, а сцепление С1 и сцепление CR находятся в состоянии расцеплено. Как показано на фиг. 66, переключение на повышенную передачу в режиме ПОВ/П для ГТС (далее именуемом режимом ПОВ/П для ГТС Hi) осуществляется в состоянии, когда сцепление С1 находится в состоянии сцеплено, а тормоз В1 и сцепление CR находятся в состоянии расцеплено. В режиме ПОВ/П для ГТС Lo сцепление С1 находится в состоянии расцеплено, тормоз В1 находится в состоянии сцеплено, и первый дифференциал 908 переходит в состояние понижающей передачи, при этом мощность двигателя 512 передается на первое водило СА1, соединенное со вторым водилом СА2 в состоянии, когда обороты Ne двигателя уменьшаются. С другой стороны, в режиме ПОВ/П для ГТС Hi сцепление С1 сцеплено, а тормоз В1 расцеплен, и первый дифференциал 908 переходит в состояние прямого соединения, при этом мощность двигателя 512 передается на первое водило СА1, соединенное со вторым водилом СА2 в состоянии, когда обороты Ne двигателя остаются неизменными. Кроме того, в режиме ПОВ/П для ГТС, сцепление CR находится в состоянии расцеплено, при этом второй дифференциал 906 в одиночку образует вариатор электрической машины. Таким образом, первый блок 904 передачи мощности способен распределять мощность двигателя 512, сообщенную первому водилу СА1, между первой солнечной шестерней S1 и первой кольцевой шестерней R1. То есть в первом блоке 904 передачи мощности прямой крутящий момент двигателя механически передается на первую кольцевую шестерню R1 путем создания противодействующей силы против крутящего момента Те двигателя, который вводится на первое водило СА1 с использованием первой вращающейся электрической машины MG1, а электрическая энергия, генерируемая первой вращающейся электрической машиной MG1 путем использования мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, передается на вторую вращающуюся электрическую машину MG2 через заданный электрический контур. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. На фиг. 69 показан случай в то время, когда транспортное средство 900 движется вперед в состоянии, в котором вторая вращающаяся электрическая машина MG2 выдает положительный крутящий момент в положительном направлении. В то время, когда транспортное средство 900 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении в отличие от работы в то время, когда транспортное средство 900 движется вперед. На Фиг. 70 показан случай в то время, когда транспортное средство 900 движется вперед в состоянии, в котором вторая вращающаяся электрическая машина MG2 вращается в положительном направлении, чтобы выдавать положительный крутящий момент. На фиг. 71 показан случай в то время, когда транспортное средство 900 движется назад в состоянии, когда вторая вращающаяся электрическая машина MG2 вращается в отрицательном направлении для выдачи отрицательного крутящего момента.
[0424] На фиг. 72 представлена номограмма в режиме ПОН/П для ГТС в режиме привода ГТС. Как показано на фиг. 66, режим ПОН/П для ГТС осуществляется в состоянии, когда сцепление С1 и тормоз В1 расцеплены, а сцепление CR находится в состоянии сцеплено. В режиме ПОН/П для ГТС, второй дифференциал 906 и первый дифференциал 908 в целом образуют вариатор электрической машины который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности одного второго дифференциала 906. Таким образом, первый блок 904 передачи мощности способен распределять мощность двигателя 512, сообщаемого второй солнечной шестерней S2, между первой солнечной шестерней S1 и первой кольцевой шестерней R1. То есть в первом блоке 904 передачи мощности прямой крутящий момент двигателя механически передается на первую кольцевую шестерню R1 путем создания противодействующей силы против крутящего момента Те двигателя, сообщаемого второй солнечной шестерней SS, с использованием первой вращающейся электрической машины MG1, а электрическая энергия, генерируемая первой вращающейся электрической машиной MG1 путем использования мощности двигателя 512, распределенной на первую вращающуюся электрическую машину MG1, передается на вторую вращающуюся электрическую машину MG2 через заданный электрический контур. Блок 582 гибридного управления заставляет двигатель 512 работать, заставляет крутящий момент Tg машины MG1, который представляет собой противодействующий крутящий момент против крутящего момента Те двигателя, выдаваться посредством генерирования мощности первой вращающейся электрической машиной MG1, и заставляет крутящий момент Tm машины MG2 выдаваться из второй вращающейся электрической машины MG2 путем использования электрической энергии, генерируемой первой вращающейся электрической машиной MG1. На фиг. 72 показан случай в то время, когда транспортное средство 900 движется вперед в состоянии, в котором вторая вращающаяся электрическая машина MG2 вращается в положительном направлении, чтобы выдавать положительный крутящий момент. В то время когда транспортное средство 900 движется назад, вторая вращающаяся электрическая машина MG2 вращается в обратном направлении, в отличие от работы в то время, когда транспортное средство 900 движется вперед.
[0425] Как описано со ссылкой на фиг. 69-72, режим ПОВ/П для ГТС и режим ПОН/П для ГТС отличаются друг от друга вращающимся элементом, которому сообщается мощность двигателя 512, компонентами, которые осуществляют функции вариатора электрической машины, при этом режим ПОВ/П для ГТС и режим ПОН/П для ГТС отличаются друг от друга коэффициентом распределения мощности в то время, когда первый блок 904 передачи мощности должен служить в качестве вариатора электрической машины. Прямой крутящий момент двигателя в режиме ПОВ/П для ГТС уменьшается по сравнению с крутящим моментом Те двигателя. С другой стороны, прямой крутящий момент двигателя в режиме ПОН/П для ГТС увеличивается по сравнению с крутящим моментом Те двигателя. В настоящем варианте осуществления изобретения второй дифференциал 906 в одиночку образует вариатор электрической машины в режиме ПОВ/П для ГТС (см. фиг. 69-71). Таким образом, когда дифференциальный статус второго дифференциала 906 управляется в результате управления рабочим статусом первой вращающейся электрической машины MG1 в состоянии, когда сцепление С1 находится в состоянии сцеплено, а сцепление CR находится в состоянии расцеплено, крутящий момент, уменьшившийся по сравнению с крутящим моментом Те двигателя, механически передается на первую кольцевую шестерню R1.
[0426] На фиг. 73 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС, и показан случай прямого соединения, где вращающиеся элементы второго дифференциала 906 и первый дифференциал 908 вращаются как одно целое. Как показано на фиг. 66, режим фиксированной передачи с прямым соединением осуществляется в состоянии, в котором сцепление С1 и сцепление CR включены, а тормоз В1 находится в состоянии расцеплено. Таким образом, первый блок 904 передачи мощности способен напрямую выдавать мощность двигателя 512 от первой кольцевой шестерни R1. Блок 582 гибридного управления заставляет двигатель 512 выдавать крутящий момент Те двигателя, чтобы придать движение транспортному средству 900. Таким образом, блок 582 гибридного управления может не только обеспечить выдачу крутящего момента Те двигателя, но и заставить также, по меньшей мере, одну из машин - либо первую вращающуюся электрическую машину MG1, либо вторую вращающуюся электрическую машину MG2 - выдавать крутящий момент, чтобы придать движение транспортному средству 900.
[0427] На фиг. 74 представлена номограмма в режиме неподвижной шестерни в режиме привода ГТС и показан случай режима понижающей передачи (ПОН/П), где вращение двигателя 512 уменьшается по скорости и выдается от первой кольцевой шестерни R1. Как показано на фиг. 66, в ПОН/П в режиме неподвижной шестерни (далее именуемом ПОН/П режимом фиксированной передачи) осуществляется в состоянии, когда тормоз В1 и сцепление CR включены, а сцепление С1 расцеплено. В ПОН/П в режиме фиксированной передачи сцепление CR находится в состоянии сцеплено, при этом второй дифференциал 906 и первый дифференциал 908 образуют один дифференциальный механизм. Кроме того, в ПОН/П в режиме фиксированной передачи, тормоз В1 сцеплен, а сцепление С1 находится в состоянии расцеплено, при этом первый дифференциал 908 переходит в состояние понижающей передачи. Таким образом, в первом блоке 904 передачи мощности вращение двигателя 512, сообщаемого второй солнечной шестерней S2, уменьшается по скорости и выдается от первой кольцевой шестерни R1. Блок 582 гибридного управления заставляет двигатель 512 выдавать крутящий момент Те двигателя, чтобы придать движение транспортному средству 900. Таким образом, блок 582 гибридного управления может не только обеспечить выдачу крутящего момента Те двигателя, но и заставить также вторую вращающуюся электрическую машину MG2 выдавать крутящий момент, чтобы придать движение транспортному средству 900. ПОН/П в режиме фиксированной передачи предпочтителен, например, во время подъема на возвышенности, буксировки и пр.
[0428] Блок 582 гибридного управления определяет, какой режим должен быть установлен путем внесения скорости V транспортного средства и нагрузки транспортного средства (например, требуемого приводного крутящего момента) в карту изменения режима привода, как показано на фиг. 30 или фиг. 31 вышеописанного шестого варианта осуществления. Когда этот определенный режим привода представляет собой текущий режим привода, блок 582 гибридного управления поддерживает текущий режим привода. Когда этот определенный режим привода отличен от текущего режима привода, блок 582 гибридного управления задает этот определенный режим привода вместо текущего режима привода. В настоящем варианте осуществления в области каждого режима фиксированной передачи с прямым соединением, показанным на фиг. 30 и фиг. 31, область низкой скорости транспортного средства может быть установлена для области ПОН/П режима фиксированной передачи.
[0429] Блок 584 изменения мощности передачи управляет работой узлов сцепления (рабочими статусами) сцепления С1, тормоза В1 и сцепления CR на основе режима привода, установленного блоком 582 гибридного управления. Блок 584 изменения мощности передачи выдает сигнал Sp команды управления гидравликой для соединения и/или расцепления каждого из узлов - сцепления С1, тормоза В1 и сцепления CR гидравлическому контуру 554 управления, чтобы обеспечить передачу мощности для движения в режиме привода, установленного блоком 582 гибридного управления.
[0430] Когда двигатель 512 запускается в режиме ЭТС с одним электрическим двигателем, электронный блок 580 управления устанавливает сцепление С1, сцепление CR или тормоз В1 в состояние сцеплено и, в этом состоянии воспламеняет топливо, увеличивая при этом обороты Ne двигателя, с использованием первой вращающейся электрической машины MG1, когда это необходимо. При таком запуске двигателя, электронный блок 580 управления дополнительно заставляет вторую вращающуюся электрическую машину MG2 выдавать компенсирующий крутящий момент Tmadd в качестве крутящего момента подавления противодействующей силы.
[0431] В транспортном средстве 900 согласно настоящему варианту осуществления изобретения, как и в случае с транспортным средством 810 вышеописанных десятого и одиннадцатого вариантов осуществления изобретения, возникает обеспокоенность, что вторая вращающаяся электрическая машина MG2 не может в достаточной степени компенсировать падение приводного крутящего момента, и, в результате, невозможно уменьшить толчок во время запуска двигателя. Напротив, в транспортном средстве 900 согласно настоящему варианту осуществления изобретения, как в случае с транспортным средством 810 вышеописанных десятого и одиннадцатого вариантов осуществления, выполняется запуск двигателя с включением сцепления CR, и крутящий момент Tg машины MG1 (отрицательный крутящий момент) выдается посредством помощи машины MG1 для выдачи компенсирующего крутящего момента Tmadd. То есть операции управления электронного блока 580 управления, показанные в вышеописанном десятом варианте осуществления и одиннадцатом варианте осуществления, могут быть применены на транспортном средстве 900 согласно настоящему варианту осуществления изобретения. Таким образом, согласно настоящему варианту осуществления изобретения достигаются преимущества, аналогичные таковым в вышеописанных десятом и одиннадцатом вариантам осуществления изобретения.
[0432] На фиг. 75 представлена схема, которая иллюстрирует схематичную конфигурацию устройств, относящихся к движению транспортного средства 1000 согласно тринадцатому варианту осуществления изобретения. На фиг. 75 транспортное средство 1000 представляет собой гибридное транспортное средство, включающее в себя двигатель 512, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, систему 1002 передачи мощности и ведущие колеса 516. Система 1002 передачи мощности включает в себя первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2.
[0433] Система 1002 передачи мощности расположена в контуре передачи мощности между двигателем 512 и ведущими колесами 516. Система 1002 передачи мощности включает в себя первый блок 1004 передачи мощности, второй блок 526 передачи мощности, ведомую шестерню 530, ведомый вал 532, шестерню 534 конечной передачи (которая имеет меньший диаметр, чем ведомая шестерня 530), шестерню 538 дифференциала, и пр. внутри корпуса 522. Ведомая шестерня 530 находится в зацеплении с ведущей шестерней 528. Ведущая шестерня 528 представляет собой выходной вращающийся элемент первого блока 1004 передачи мощности. Ведомая шестерня 530 жестко прикреплена к ведомому валу 532 с тем, чтобы быть неповоротной относительно него. Шестерня 534 конечной передачи жестко прикреплена к ведомому валу 532 с тем, чтобы быть неповоротной относительно него. Шестерня 538 дифференциала находится в зацеплении с шестерней 534 конечной передачи через дифференциальную кольцевую шестерню 536. Система 1002 передачи мощности включает в себя оси 540, соединенные с шестерней 538 дифференциала, и пр.
[0434] Первый блок 1004 передачи мощности расположен коаксиально с входным валом 542, который представляет собой входной вращающийся элемент первого блока 1004 передачи мощности, и включает в себя второй дифференциал 844, первый дифференциал 1006 и сцепление CR. Второй дифференциал 844 включает в себя второй планетарный зубчатый механизм 848 (второй дифференциальный механизм) и первую вращающуюся электрическую машину MG1. Первый дифференциал 1006 включает в себя первый планетарный зубчатый механизм 850 (первый дифференциальный механизм), сцепление С1 и тормоз В1.
[0435] Во втором дифференциале 844 первое водило СА1 представляет собой четвертый вращающийся элемент RE4, который представляет собой входной элемент, соединенный с выходным вращающимся элементом первого дифференциала 1006 (то есть второй кольцевой шестерней R2 первого планетарного зубчатого механизма 850), и служит в качестве входного вращающегося элемента второго дифференциала 844. Первая солнечная шестерня S1 соединена как одно целое с валом 552 ротора первой вращающейся электрической машины MG1, и представляет собой пятый вращающийся элемент RE5, являющийся противодействующим элементом, с которым соединена первая вращающаяся электрическая машина MG1 так, что при этом передается мощность. Первая кольцевая шестерня R1 соединена как одно целое с ведущей шестерней 528 и является шестым вращающимся элементом RE6, который представляет собой выходной элемент, соединенный с ведущими колесами 516. Первая кольцевая шестерня R1 служит в качестве выходного вращающегося элемента второго дифференциала 844.
[0436] В первом дифференциале 1006 вторая солнечная шестерня S2 представляет собой первый вращающийся элемент RE1, который соединен как одно целое с входным валом 542, и с которым двигатель 512 соединен через входной вал 542 так, что при этом передается мощность. Вторая солнечная шестерня S2 служит в качестве входного вращающегося элемента первого дифференциала 1006. Второе водило СА2 представляет собой третий вращающийся элемент RE3, селективно соединяемый с корпусом 522 через тормоз В1. Вторая кольцевая шестерня R2 представляет собой второй вращающийся элемент RE2, соединенный с входным вращающимся элементом второго дифференциала 844 (то есть первым водилом СА1 второго планетарного зубчатого механизма 848). Вторая кольцевая шестерня R2 служит в качестве выходного вращающегося элемента первого дифференциала 1006. Вторая солнечная шестерня S2 и второе водило СА2 селективно соединяются друг с другом через сцепление С1. Первая кольцевая шестерня R1 и второе водило СА2 селективно соединяются друг с другом через сцепление CR. Таким образом, сцепление С1 представляет собой первое устройство сцепления, которое селективно соединяет первый вращающийся элемент RE1 с третьим вращающимся элементом RE3. Сцепление CR представляет собой второе устройство сцепления, которое селективно соединяет шестой вращающийся элемент RE6 с третьим вращающимся элементом RE3. Тормоз В1 представляет собой третье устройство сцепления, которое селективно соединяет третий вращающийся элемент RE3 с корпусом 522, который является невращающимся элементом.
[0437] Первый блок 1004 передачи мощности отличается от первого блока 824 передачи мощности транспортного средства 810 согласно вышеописанному десятому варианту осуществления изобретения конструкцией элементов, однако, пространственное расположение элементов одинаковое, за исключением того, что вращающиеся элементы первого дифференциала 1006, которые селективно соединяются друг с другом сцеплением С1, отличны от вращающихся элементов первого дифференциала 846 транспортного средства 810, которые селективно соединяются друг с другом сцеплением С1. При включенном состоянии сцепления С1 в первом дифференциале 1006 так же, как и при включенном состоянии сцепления С1 в первом дифференциале 846, первый дифференциал 1006 переходит в состояние прямого соединения, в котором вращающиеся элементы первого планетарного зубчатого механизма 850 вращаются как одно целое. По этой причине первый дифференциал 1006, также как и первый дифференциал 846, способен устанавливать четыре состояния, то есть состояние прямого соединения, состояние изменения скорости обратного вращения двигателя 512, нейтральное состояние и состояние внутренней блокировки путем изменения рабочих статусов сцепления С1 и тормоза В1. Первый блок 1004 передачи мощности, также как и первый блок 824 передачи мощности, способен образовывать вариатор электрической машины, который работает при коэффициенте распределения мощности, отличном от коэффициента распределения мощности во втором дифференциале 844. Поэтому в первом блоке 1004 передачи мощности так же, как и в первом блоке 824 передачи мощности, первый дифференциал 1006 и второй дифференциал 844, которыми устанавливаются четыре состояния, соединены друг с другом, и транспортное средство 1000, также как и транспортное средство 810, способно осуществить множество режимов привода синхронно с изменением рабочего статуса сцепления CR.
[0438] В выполненном таким образом первом блоке 1004 передачи мощности мощность двигателя 512 и мощность первой вращающейся электрической машины MG1 передаются от ведущей шестерни 528 на ведомую шестерню 530. Поэтому двигатель 512 и первая вращающаяся электрическая машина MG1 соединяются с ведущими колесами 516 через первый блок 1004 передачи мощности так, что при этом передается мощность.
[0439] Во втором блоке 526 передачи мощности мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530 без прохождения через первый блок 1004 передачи мощности. Поэтому вторая вращающаяся электрическая машина MG2 соединена с ведущими колесами 516 так, что при этом передается мощность без прохождения через первый блок 1004 передачи мощности. То есть вторая вращающаяся электрическая машина MG2 представляет собой вращающуюся электрическую машину, соединенную с осями 540, которые являются выходными вращающимися элементами системы 1002 передачи мощности так, что при этом передается мощность без прохождения через первый блок 1004 передачи мощности.
[0440] Выполненная таким образом система 1002 передачи мощности предпочтительно используется для переднеприводного (FF) транспортного средства. В системе 1002 передачи мощности мощность двигателя 512, мощность первой вращающейся электрической машины MG1 или мощность второй вращающейся электрической машины MG2 передается на ведомую шестерню 530 и последовательно передается от ведомой шестерни 530 на ведущие колеса 516 через шестерню 534 конечной передачи, шестерню 538 дифференциала, оси 540 и пр. В транспортном средстве 1000 двигатель 512, первый блок 1004 передачи мощности и первая вращающаяся электрическая машина MG1 расположены вдоль оси, отличной от оси, вдоль которой расположена вторая вращающаяся электрическая машина MG2 так, что при этом осевая длина уменьшается.
[0441] Транспортное средство 1000 включает в себя электронный блок 580 управления, включающий в себя контроллер, который управляет устройствами, относящимися к движению. Транспортное средство 1000 дополнительно включает в себя блок 518 управления мощностью, аккумуляторный блок 520, гидравлический контур 554 управления, механический масляный насос (не показан) и пр.
[0442] Транспортное средство 1000 способно селективно выполнять режим привода ЭТС и режим привода ГТС в качестве режима привода. Каждый режим привода, который может выполняться в транспортном средстве 1000, и рабочие статусы устройств сцепления в каждом режиме привода такие же, что и каждый режим привода, и рабочие статусы устройств сцепления, показанные на схеме на фиг. 52 вышеописанного десятого варианта осуществления изобретения. Поскольку сцепление С1 согласно настоящему варианту осуществления селективно соединяет вторую солнечную шестерню S2 со вторым водилом СА2, номограммы, соответствующие режимам привода, такие же, что и номограммы, полученные при замене сцепления С1, устроенного так, чтобы соединять второе водило СА2 (третий вращающийся элемент RE3) со второй кольцевой шестерней R2 (вторым вращающимся элементом RE2), на сцепление C1, устроенного так, чтобы соединять вторую солнечную шестерню S2 (первый вращающийся элемент RE1) со вторым водилом СА2 (третьим вращающимся элементом RE3) на номограммах на фиг. 53-60 вышеописанного десятого варианта осуществления. Таким образом, номограммы в настоящем варианте осуществления не показаны, и описание со ссылкой на номограммы опущено.
[0443] Операции управления электронного блока 580 управления, показанные в вышеописанных десятом и одиннадцатом вариантах осуществления изобретения, могут быть применены на транспортном средстве 1000 согласно настоящему варианту осуществления изобретения. Таким образом, согласно настоящему варианту осуществления, достигаются преимущества, аналогичные таковым вышеописанных десятого и одиннадцатого вариантов осуществления.
[0444] Варианты осуществления изобретения с десятого по тринадцатый описаны подробно со ссылкой на сопровождающие чертежи, однако, изобретение применимо и к другим вариантам осуществления изобретения.
[0445] Например, в вышеописанных вариантах осуществления изобретения, как показано на блок-схеме на фиг. 63, запуск двигателя с включением сцепления CR с помощью MG1 или обычный запуск двигателя выбирается и выполняется на основе того, является ли компенсирующий крутящий момент Tmadd, который генерируется второй вращающейся электрической машиной MG2, недостаточным, а также температуры THoil рабочего масла, однако, изобретение не ограничивается этой конфигурацией. Например, может быть применен вариант осуществления изобретения, в котором способ запуска двигателя меняется на основе того, является ли недостаточным компенсирующий крутящий момент Tmadd, или температуры THoil рабочего масла, либо же может быть применен вариант осуществления, в котором двигатель постоянно запускается посредством запуска двигателя с включением сцепления CR с помощью MG1. В этих вариантах варианты осуществления, этапы S10, S20, S40 на блок-схеме на фиг. 63 при необходимости опускаются. Когда сцепление CR выполнено с возможностью изменения своего рабочего статуса в зависимости от электрической энергии, выполнять ли запуск двигателя с включением сцепления CR, может быть определено на основе статуса источника подачи электрической энергии. Таким образом, этапы блок-схемы на фиг. 63 могут при необходимости меняться.
[0446] В вышеописанных вариантах осуществления изобретения, каждый второй дифференциал 844, 906 включает в себя одноступенчатый второй планетарный зубчатый механизм 848, в котором первое водило СА1 представляет собой четвертый вращающийся элемент RE4, первая солнечная шестерня S1 представляет собой пятый вращающийся элемент RE5, а первая кольцевая шестерня R1 является шестым вращающимся элементом RE6, однако, изобретение не ограничивается этой конфигурацией. Например, каждый второй дифференциал 844, 906 может включать в себя одноступенчатый второй планетарный зубчатый механизм, в котором первое водило СА1 представляет собой четвертый вращающийся элемент RE4, первая кольцевая шестерня R1 представляет собой пятый вращающийся элемент RE5, а первая солнечная шестерня S1 является шестым вращающимся элементом RE6. В таком случае, например, на номограммах на фиг. 53-60 вышеописанного десятого варианта осуществления первая солнечная шестерня S1 и первая кольцевая шестерня R1 взаимозаменяемы друг с другом. Если коротко, каждый второй дифференциал 844, 906 должен только включать в себя одноступенчатый планетарный зубчатый механизм, в котором либо первая солнечная шестерня S1, либо первая кольцевая шестерня R1 представляет собой пятый вращающийся элемент RE5, другая является шестым вращающимся элементом RE6, и первое водило СА1 представляет собой четвертый вращающийся элемент RE4. Каждый второй дифференциал 844, 906 может включать в себя двухступенчатый планетарный зубчатый механизм вместо одноступенчатого второго планетарного зубчатого механизма. В случае двухступенчатого планетарного зубчатого механизма, один из элементов - либо солнечная шестерня, либо водило - представляет собой пятый вращающийся элемент, другой элемент является шестым вращающимся элементом, а кольцевая шестерня представляет собой четвертый вращающийся элемент.
[0447] В вышеописанных вариантах осуществления изобретения каждое транспортное средство 810, 900, 1000 включает в себя тормоз В1. На самом деле, тормоз В1 может быть предусмотрен не всегда. Даже когда каждое транспортное средство 810, 900, 1000 не включает в себя тормоз В1, каждое транспортное средство 810, 900, 1000 способно селективно устанавливать режим ЭТС с одним электрическим двигателем или режим привода ГТС и способно менять режим управления между режимом ПОВ/П для ГТС и режимом ПОН/П для ГТС в режиме привода ГТС. Если коротко, при условии, что транспортное средство включает в себя двигатель 512, второй дифференциал 844, 906, первый дифференциал 846, 908, 1006 и вторую вращающуюся электрическую машину MG2, соединенную с ведущими колесами 516 так, что при этом передается мощность, изобретение может быть применено на транспортном средстве. Ведущие колеса W2, с которыми соединена вторая вращающаяся электрическая машина MG2 так, что обеспечивает передачу мощности, не всегда должны быть такими же, что и ведущие колеса 516, с которыми соединен шестой вращающийся элемент второго дифференциала 844, 906 так, что при этом передается мощность. Например, одна из пар колес - пара передних колес, и пара задних колес - может представлять собой ведущие колеса 516, а другая может являться ведущими колесами W2. В таком случае ведущие колеса 516 и ведущие колеса W2 являются ведущими колесами, а шестой вращающийся элемент и вторая вращающаяся электрическая машина MG2 соединяются с ведущими колесами вместе так, что при этом передается мощность. Изобретение описано путем использования систем 814, 902, 1002 передачи мощности, которые соответственно предпочтительно используются для переднеприводных (FF) транспортных средств 810, 900, 1000, однако, изобретение также применимо к системе передачи мощности, которая используется транспортными средствами другой системы, например, FR система и RR система.
[0448] Вышеописанные варианты осуществления являются только иллюстративными и могут быть применены в режимах, включающих в себя различные модификации или усовершенствования на основе знаний специалистов в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2644833C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2422310C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2654250C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА, ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666008C1 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| СИСТЕМА ПРИВОДА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2572978C1 |
| ГИБРИДНОЕ ПРИВОДНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2007 |
|
RU2410250C2 |
| Устройство управления для транспортного средства с электрическим приводом | 2016 |
|
RU2655575C2 |
| УСТРОЙСТВО ПРИВОДА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2371329C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ АВТОМОБИЛЕМ | 2017 |
|
RU2675484C1 |
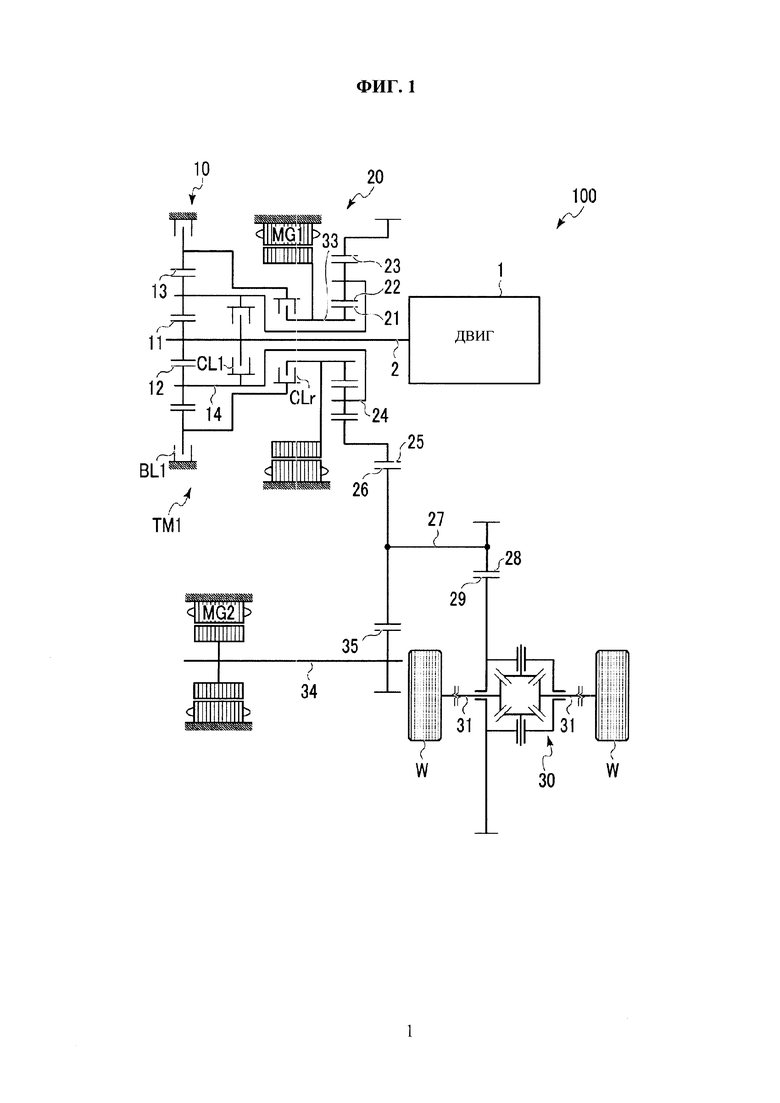
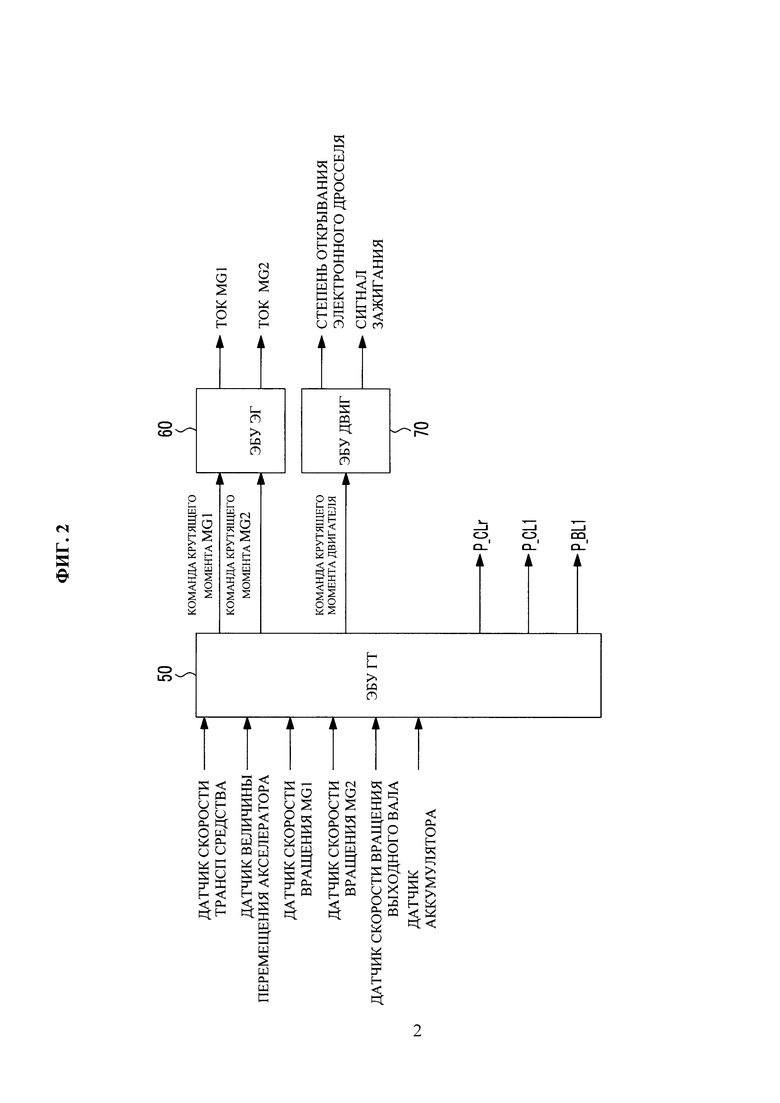
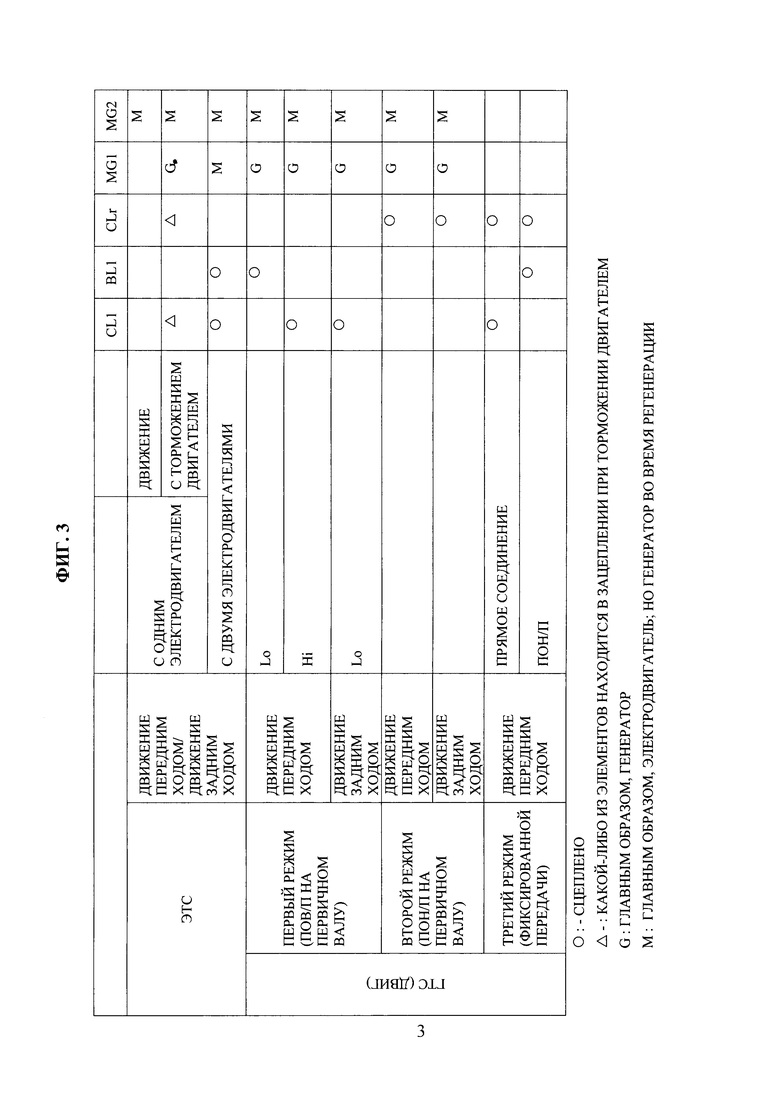
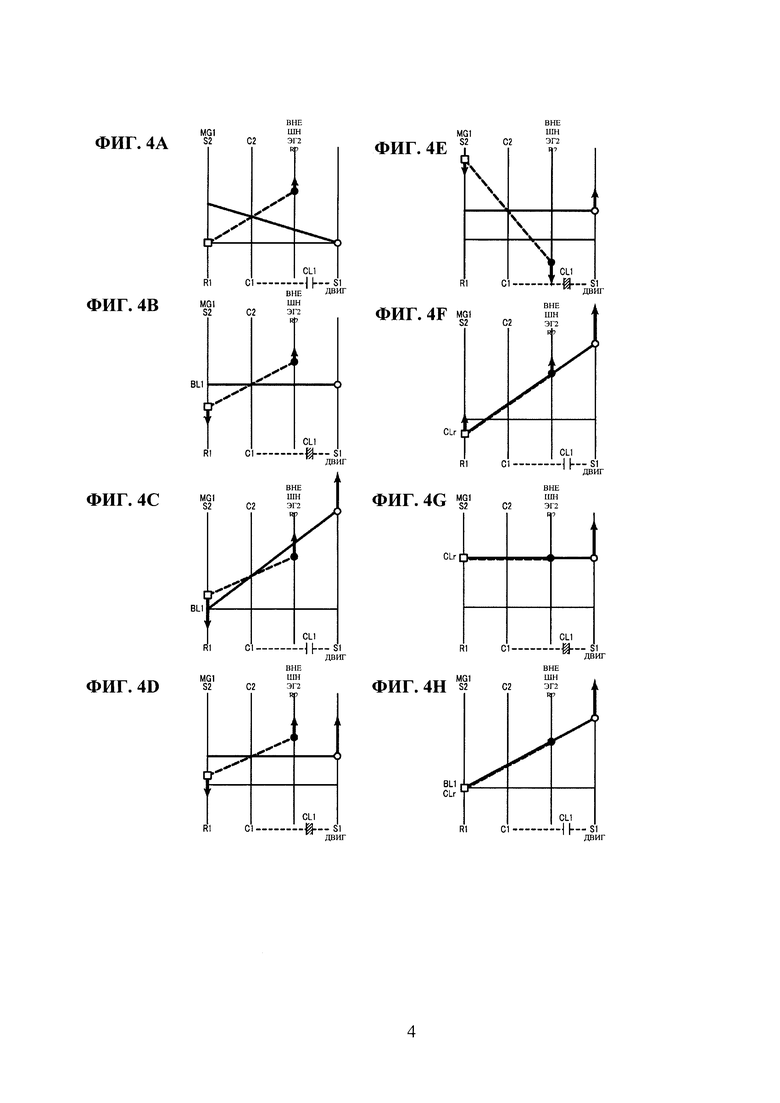
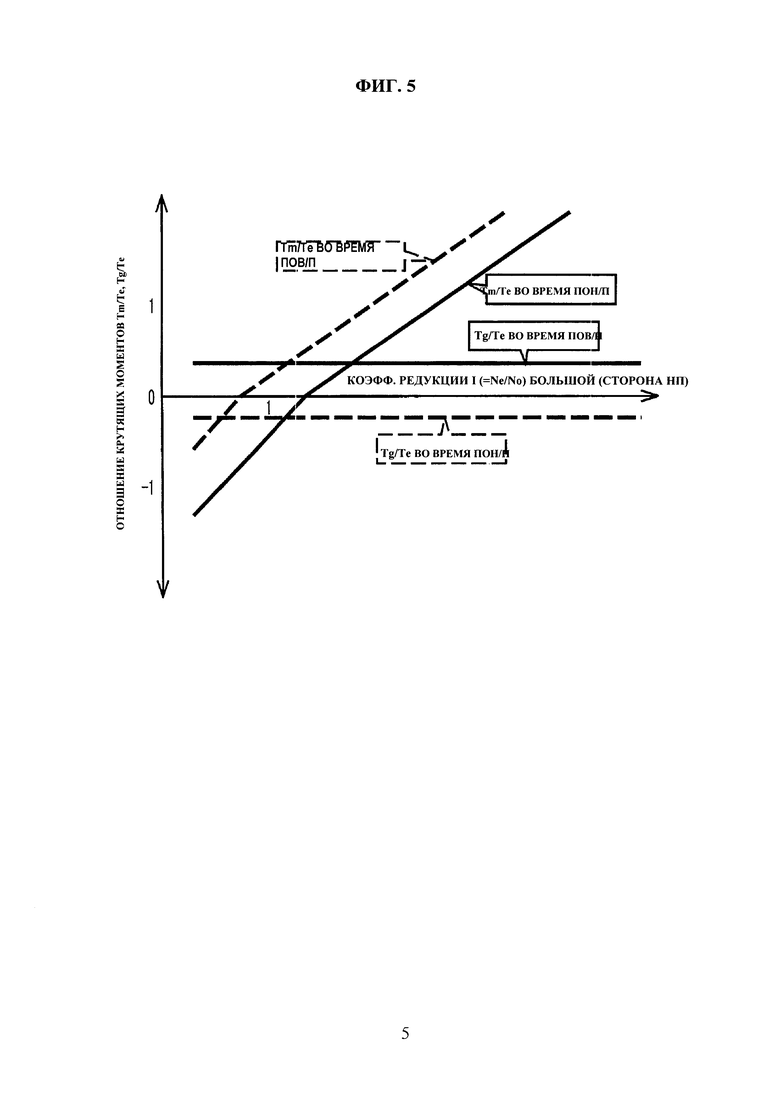
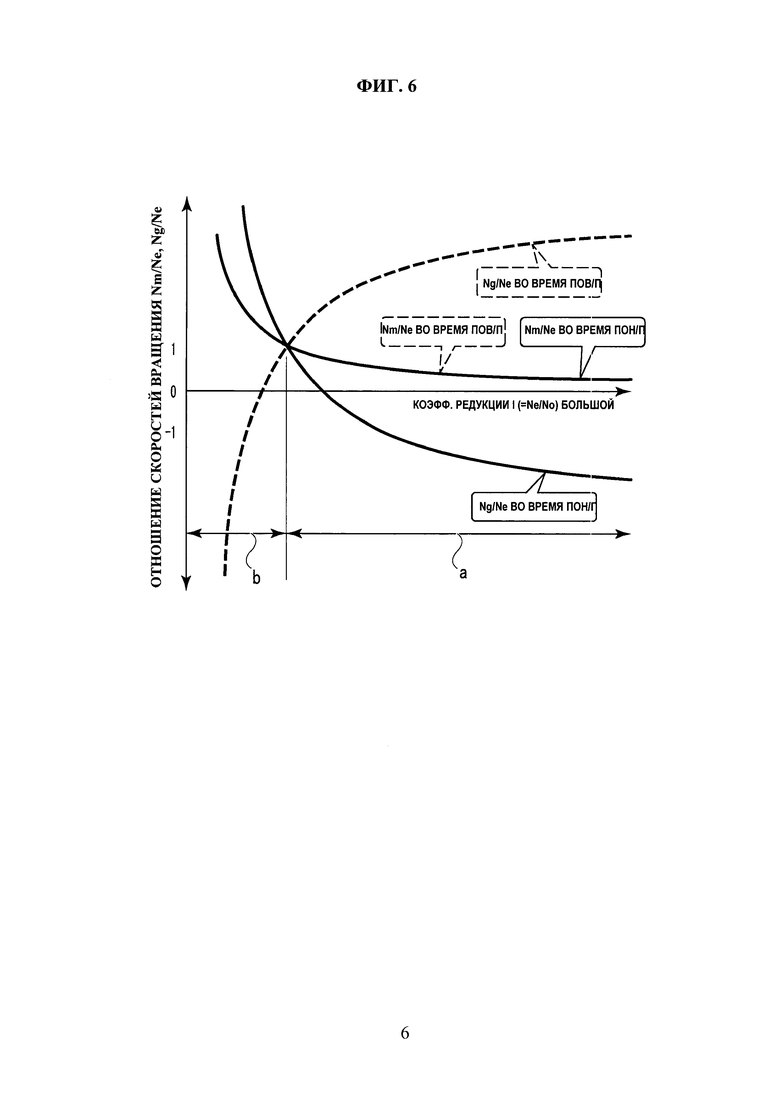

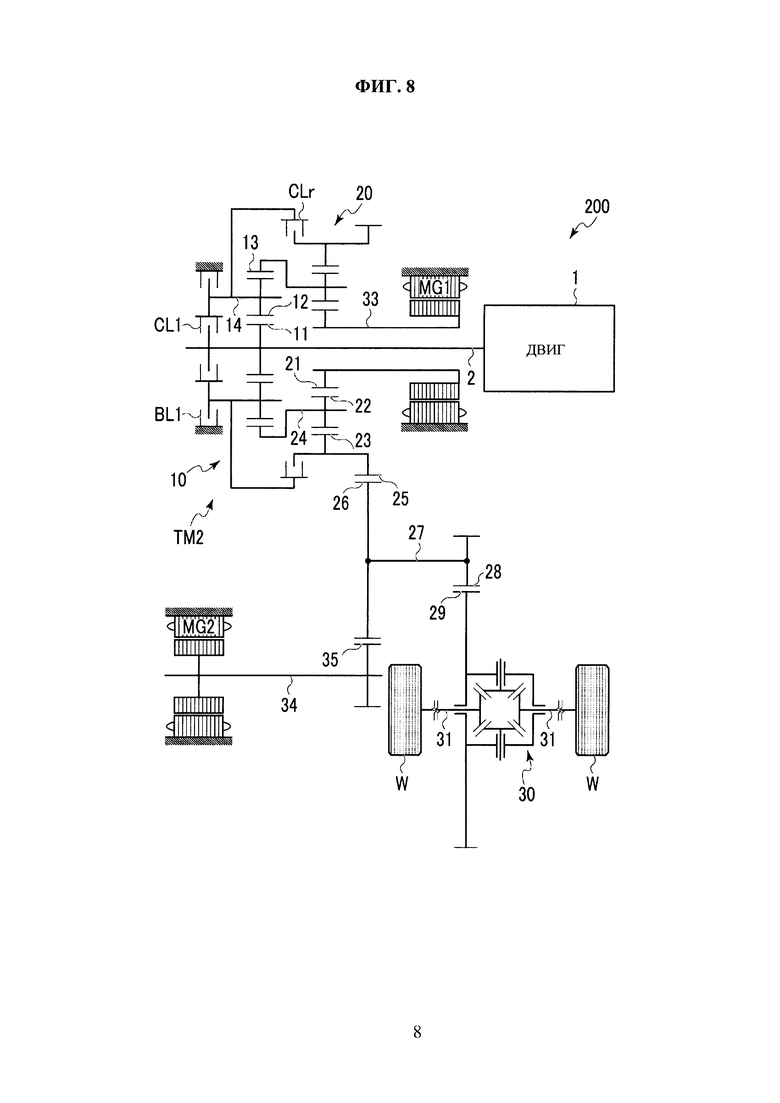
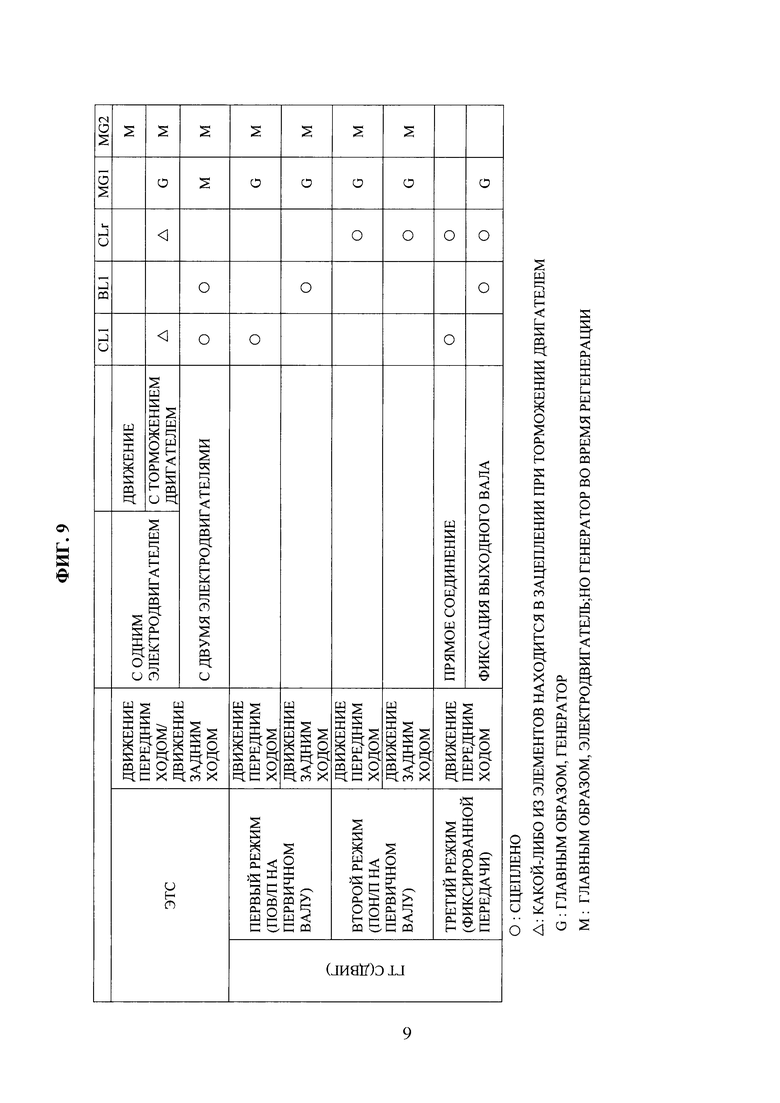
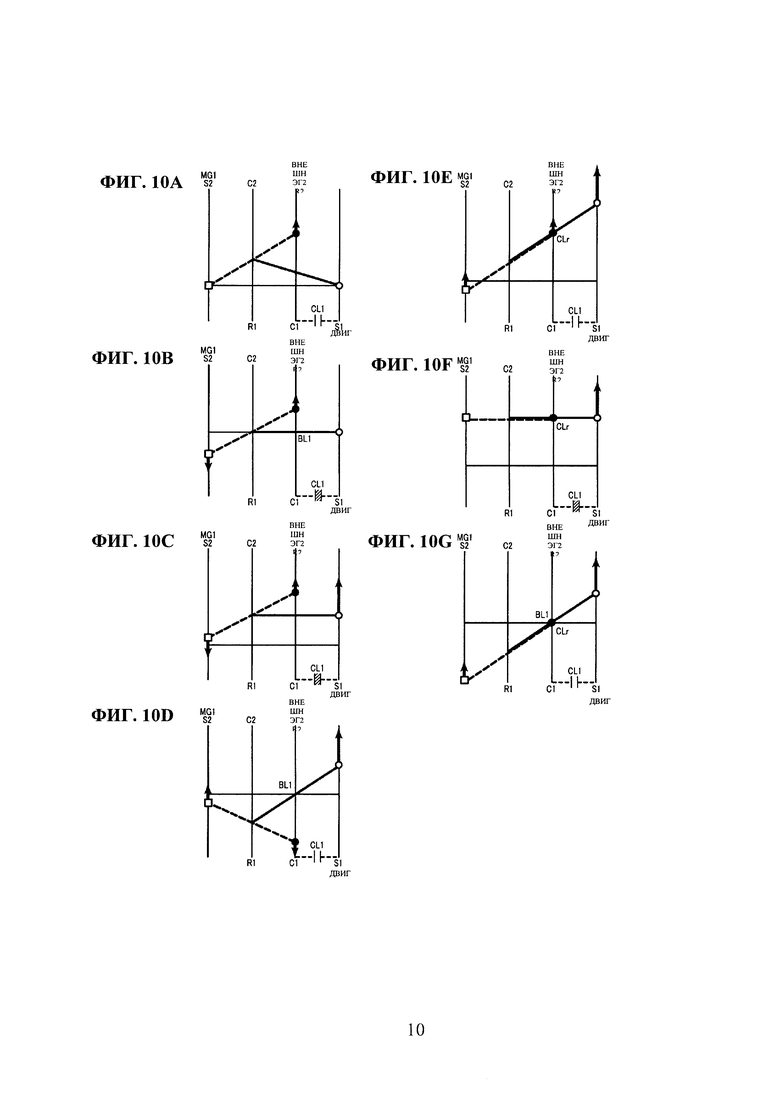
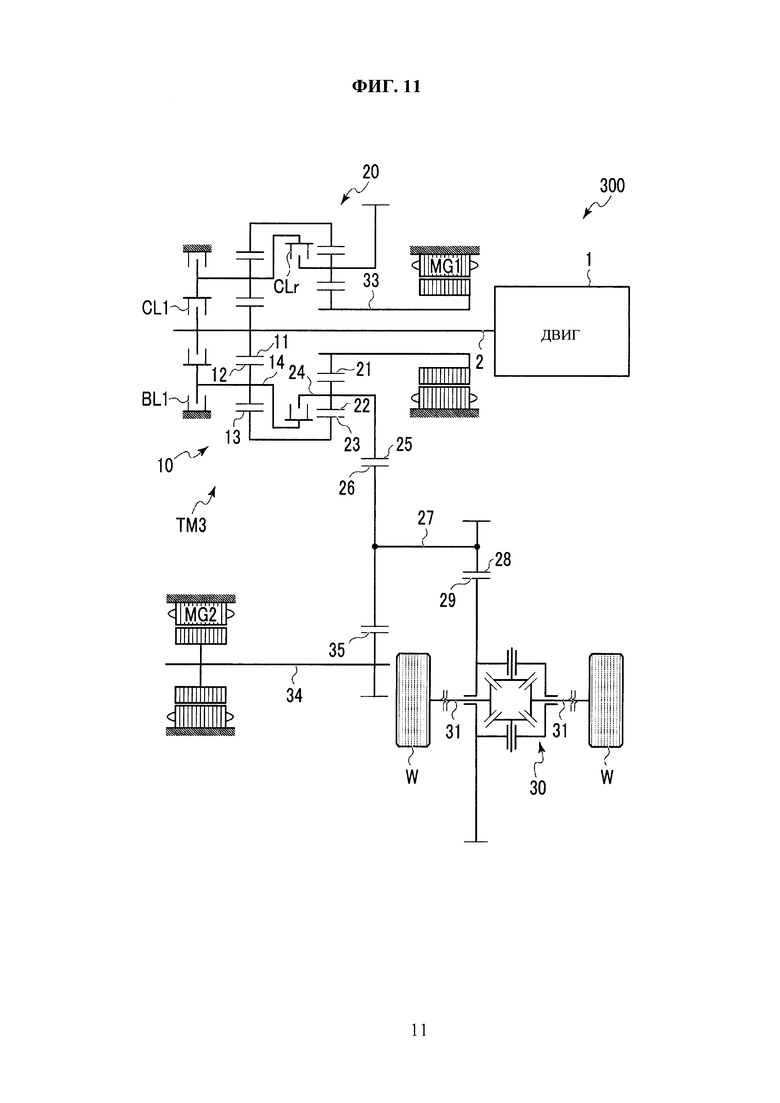

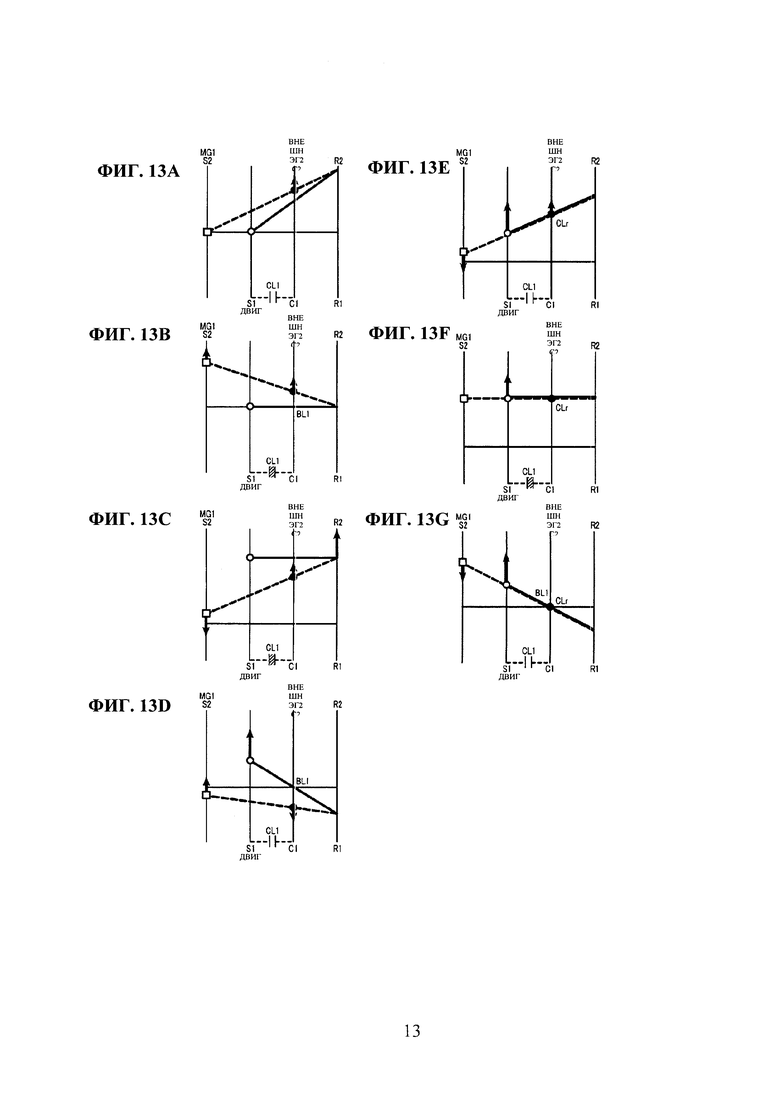

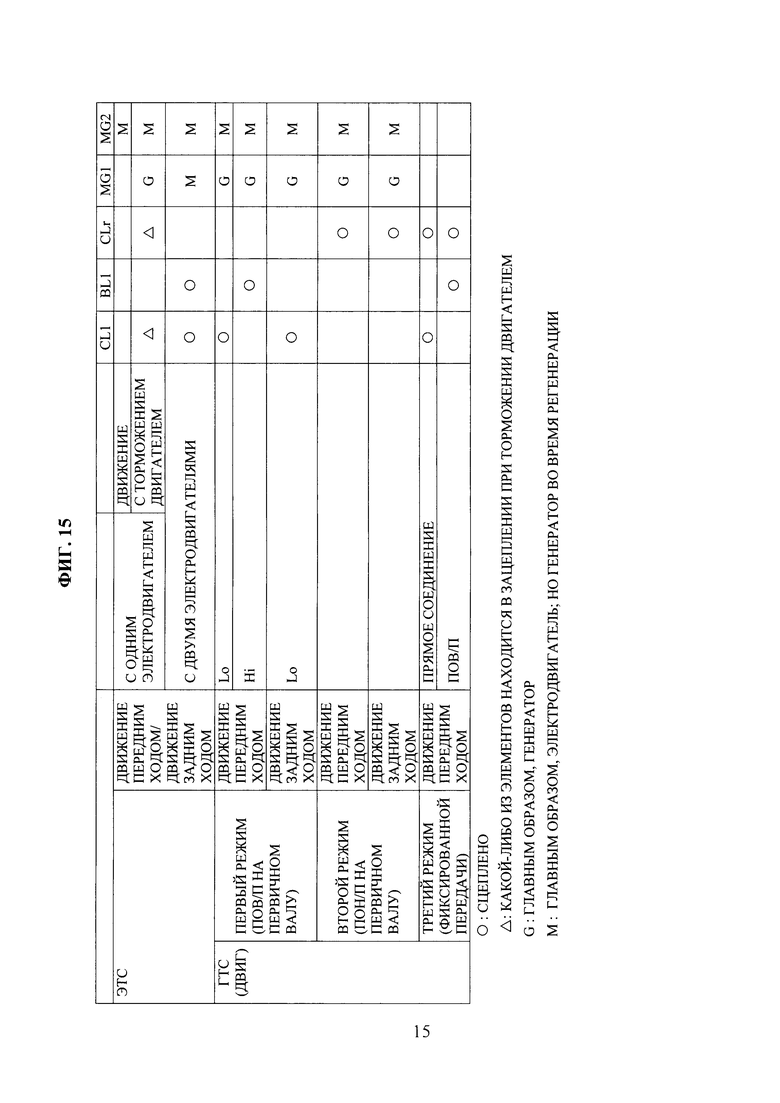

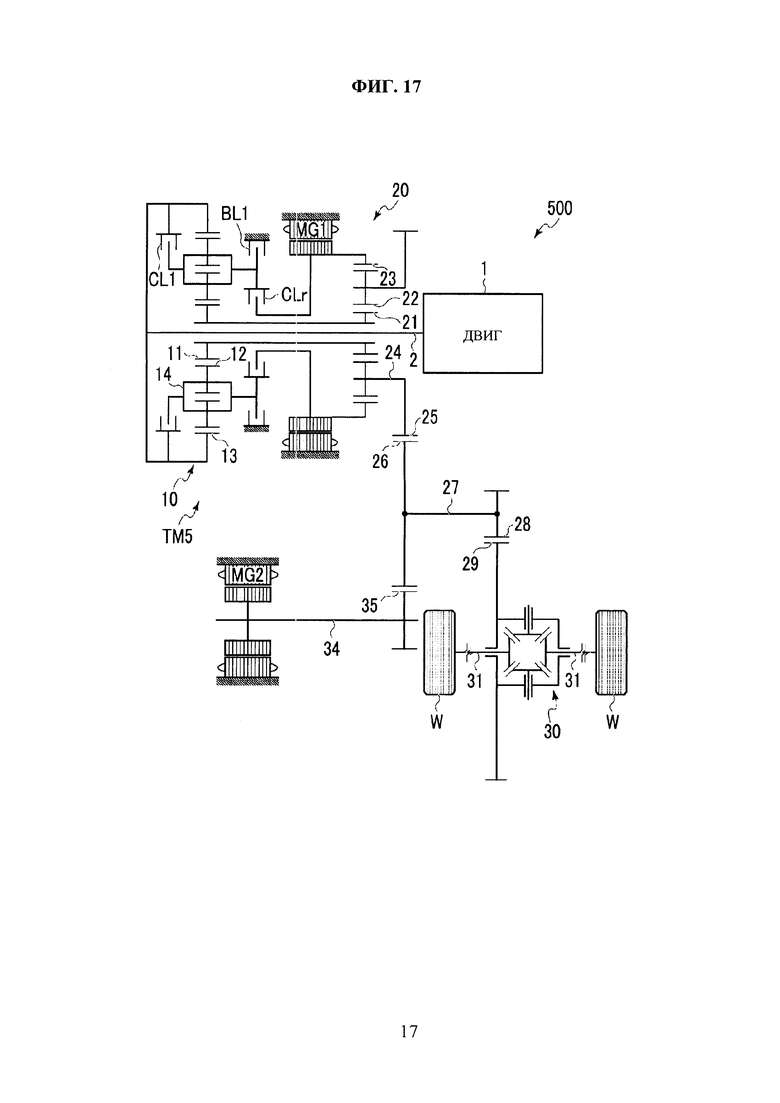

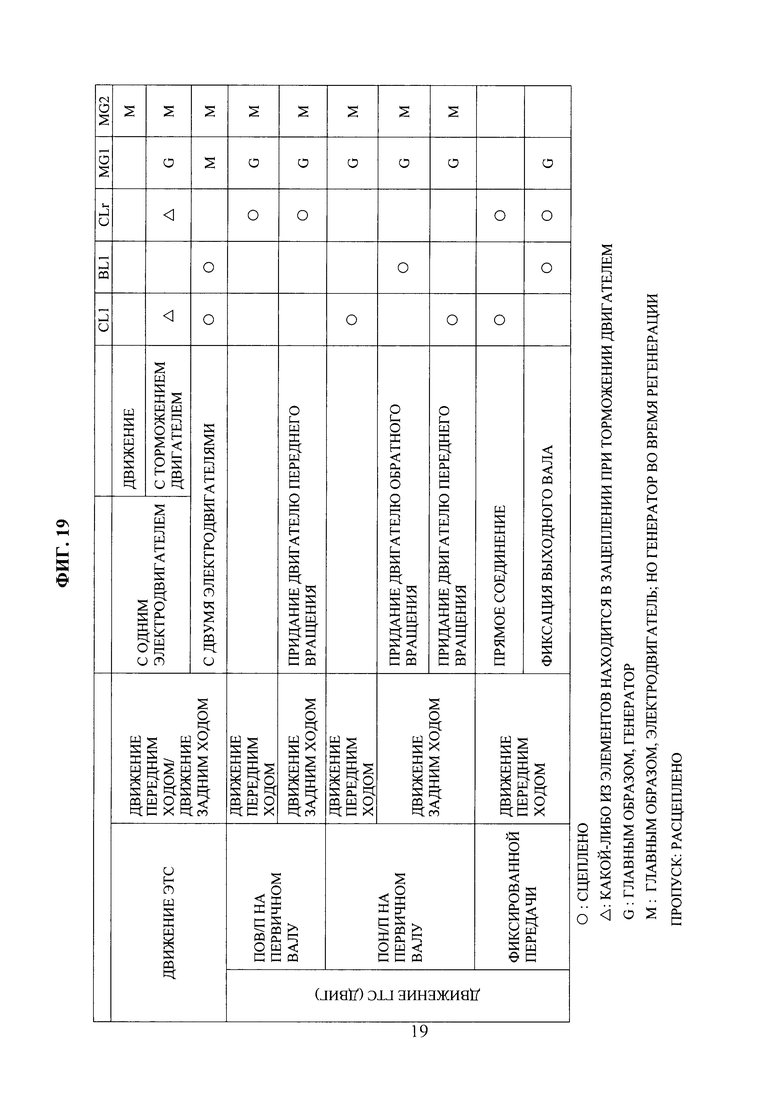
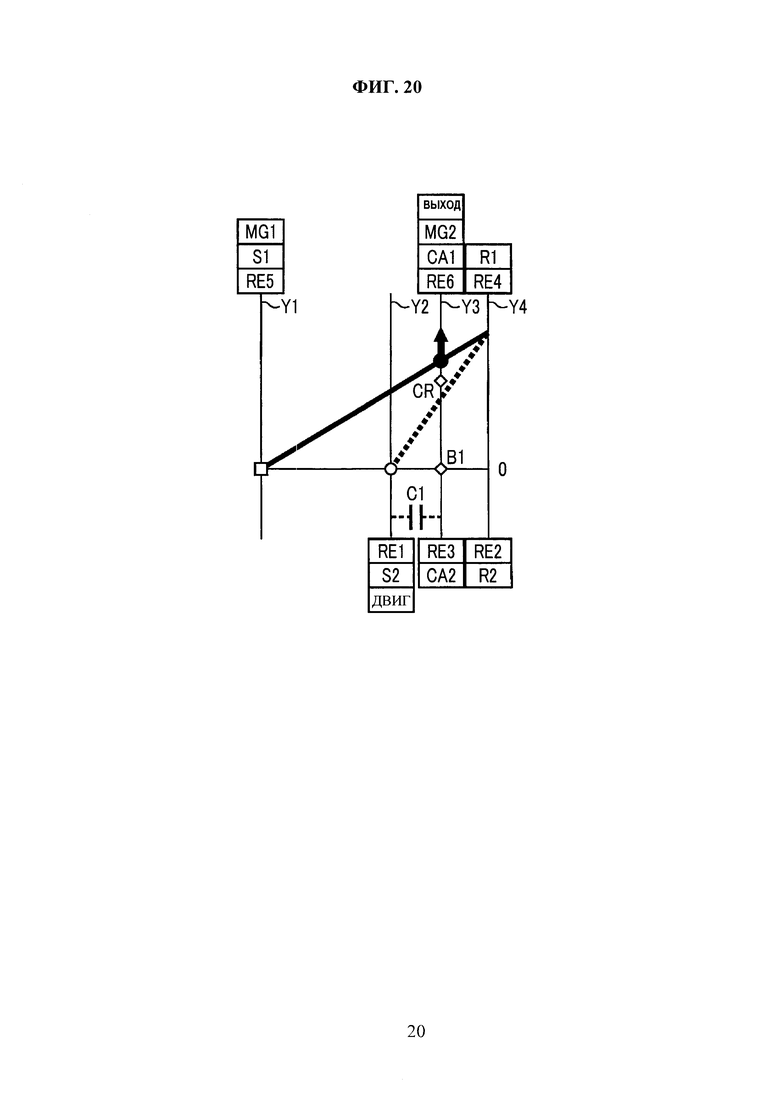
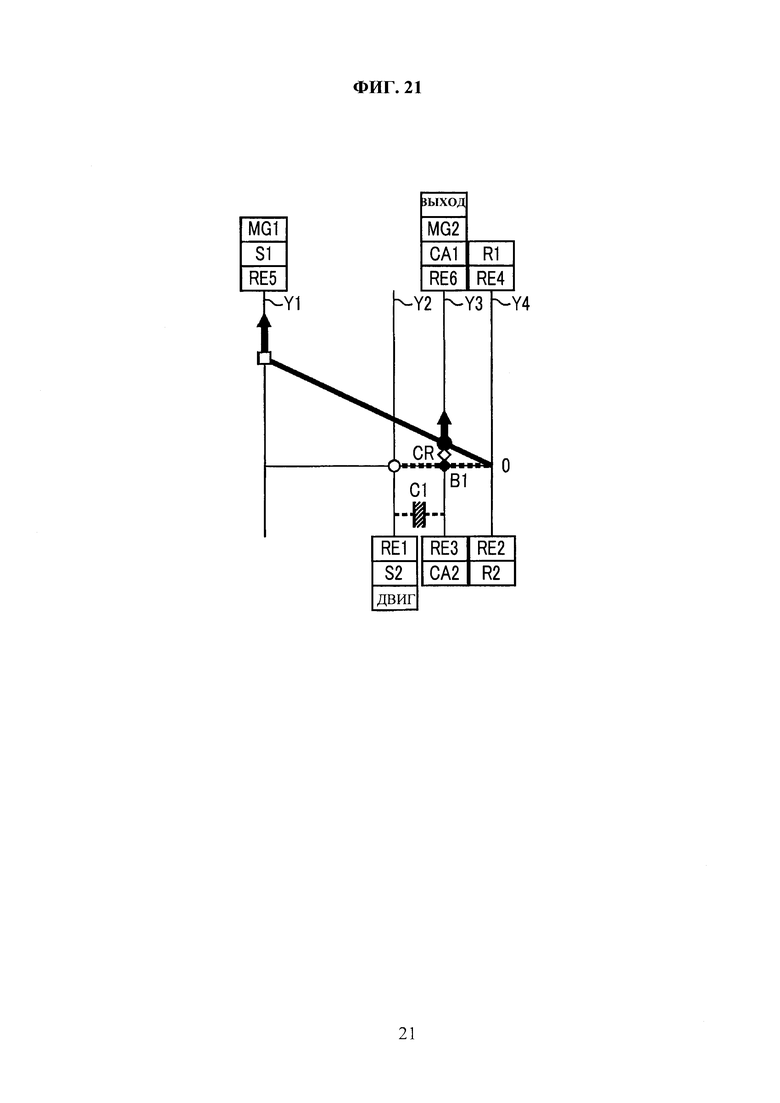
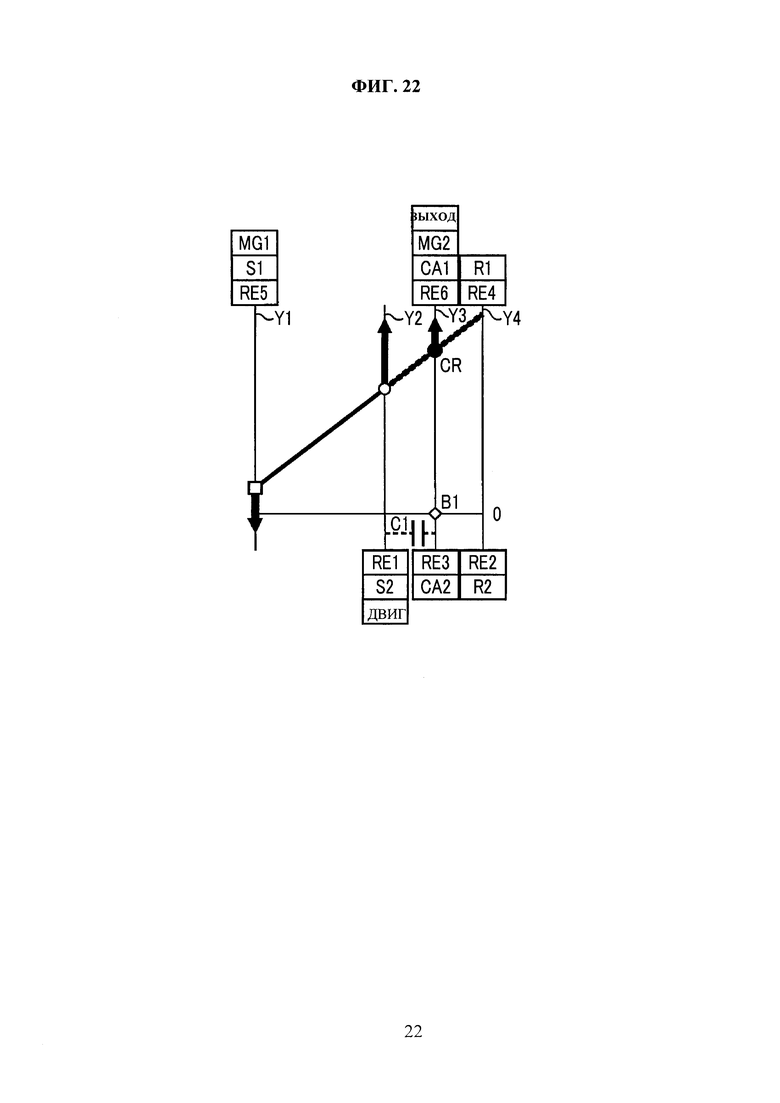
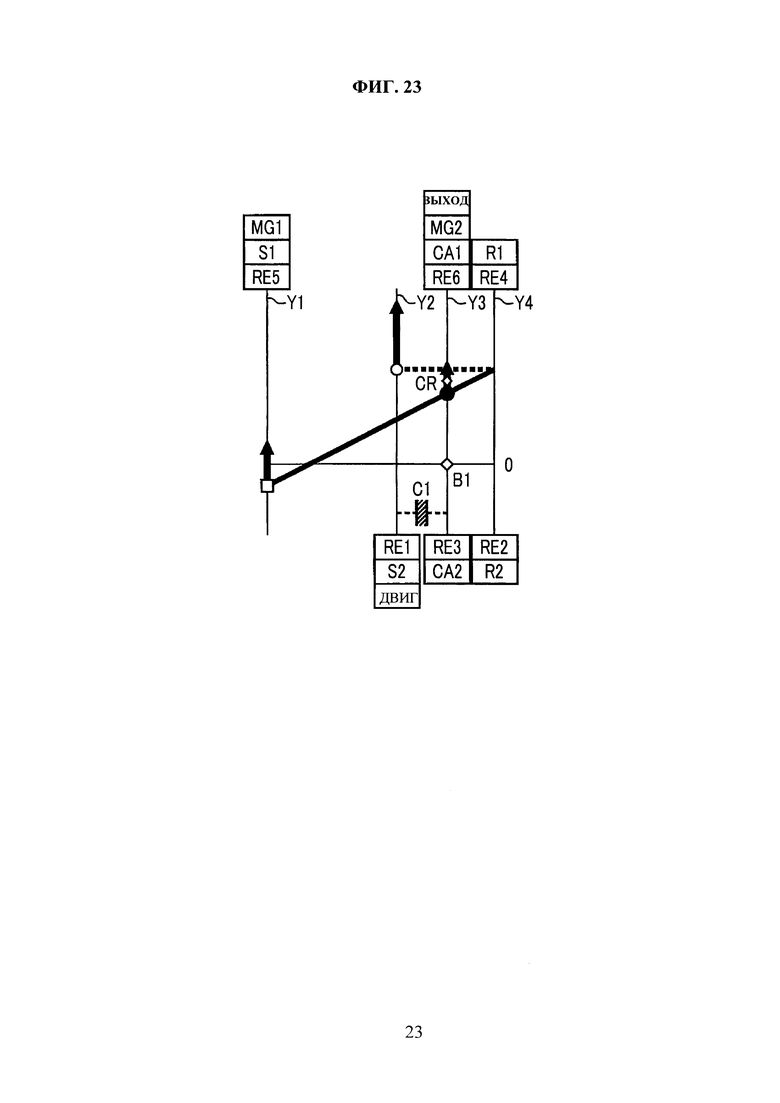
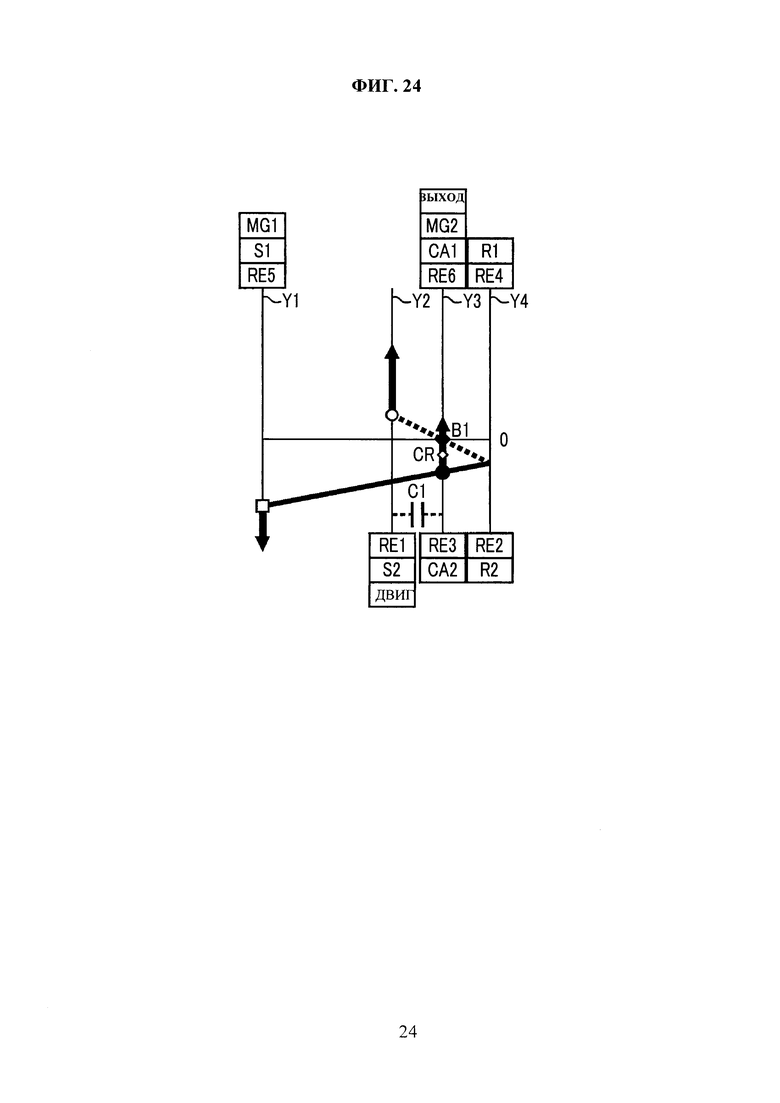
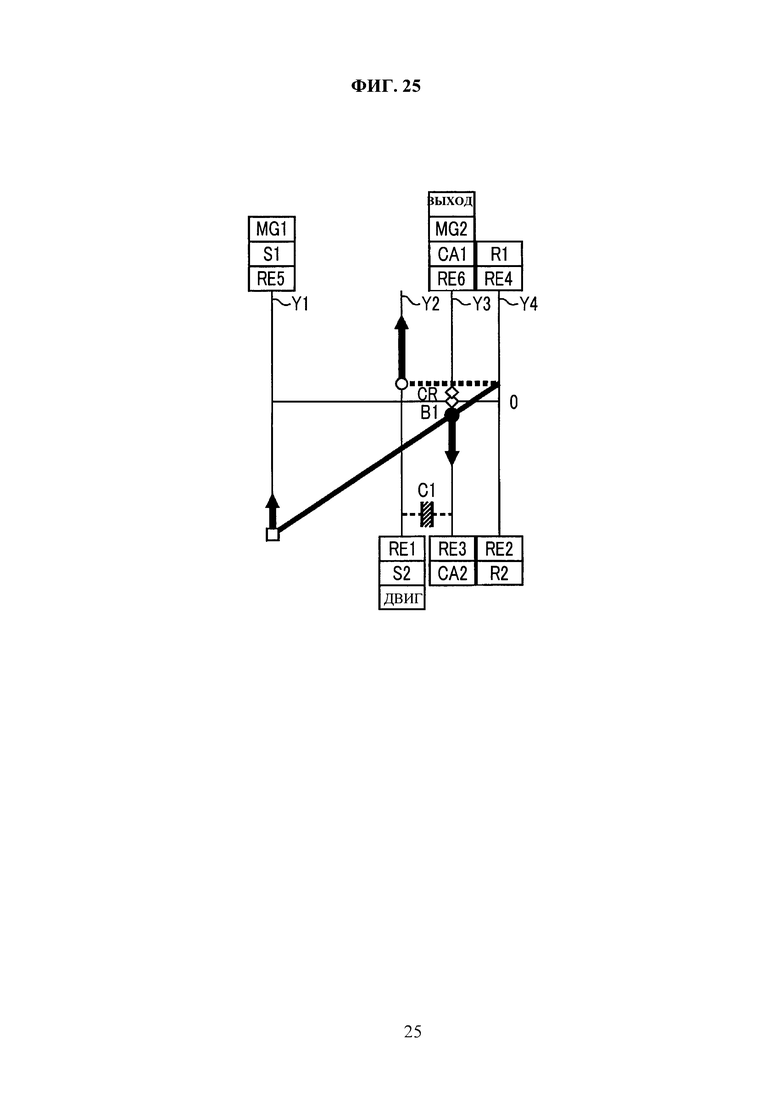
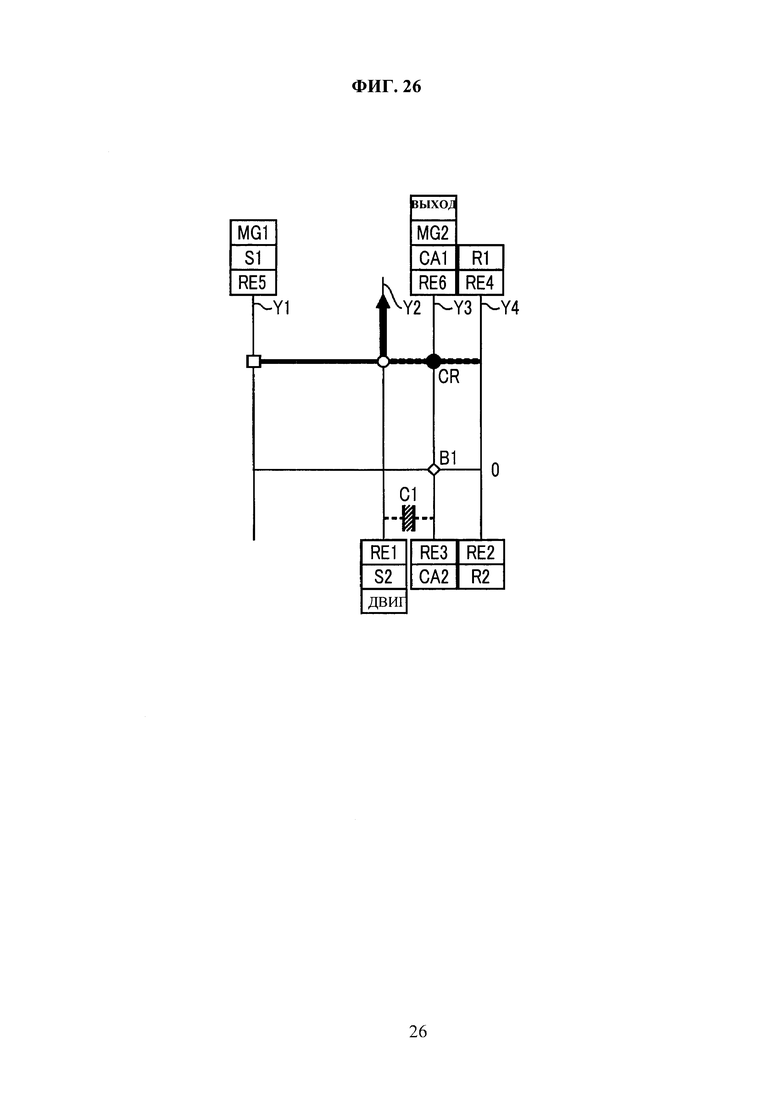

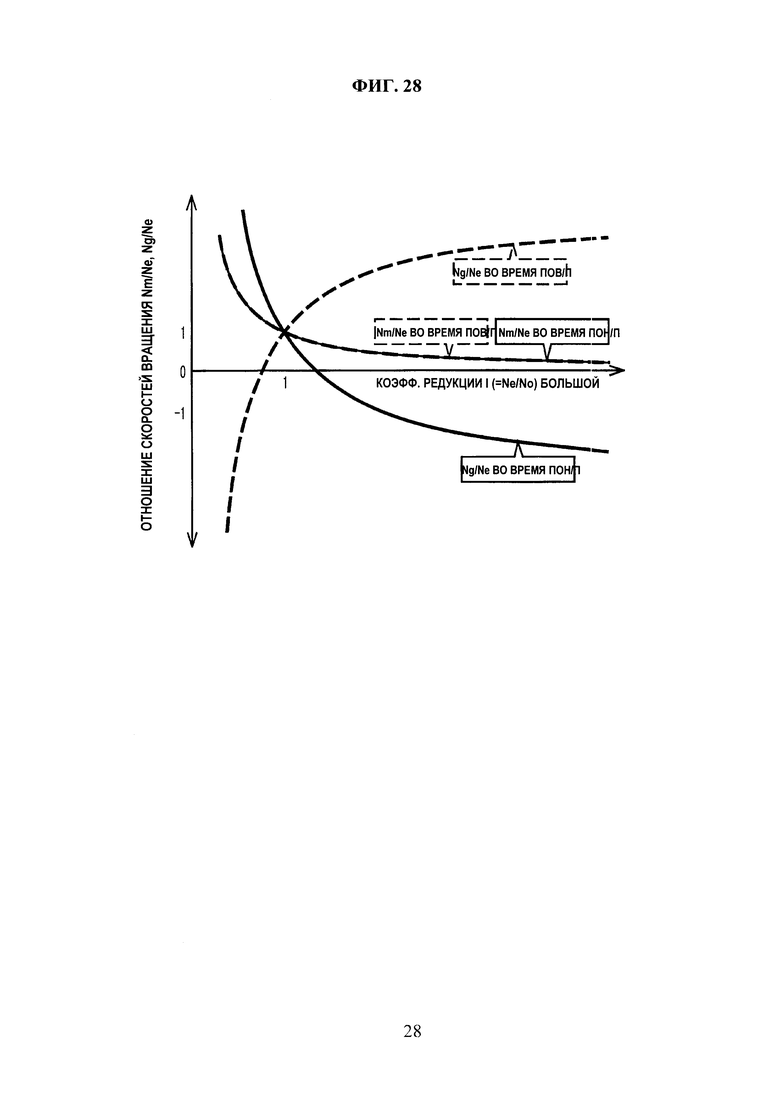
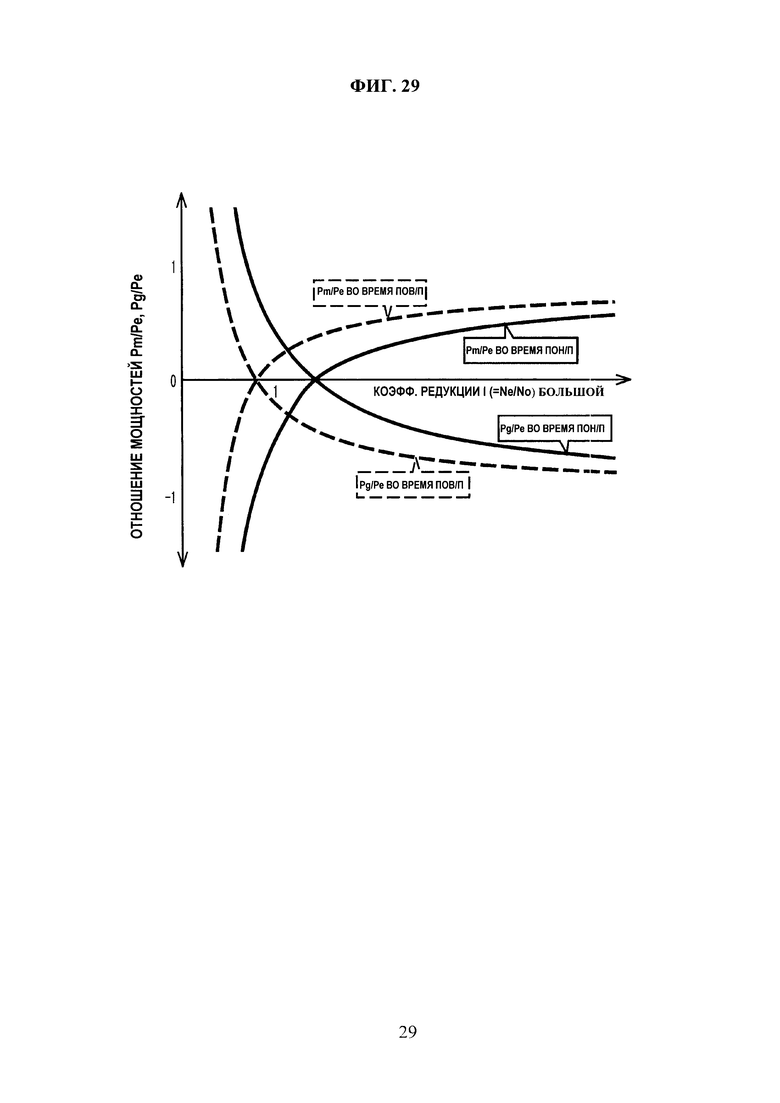
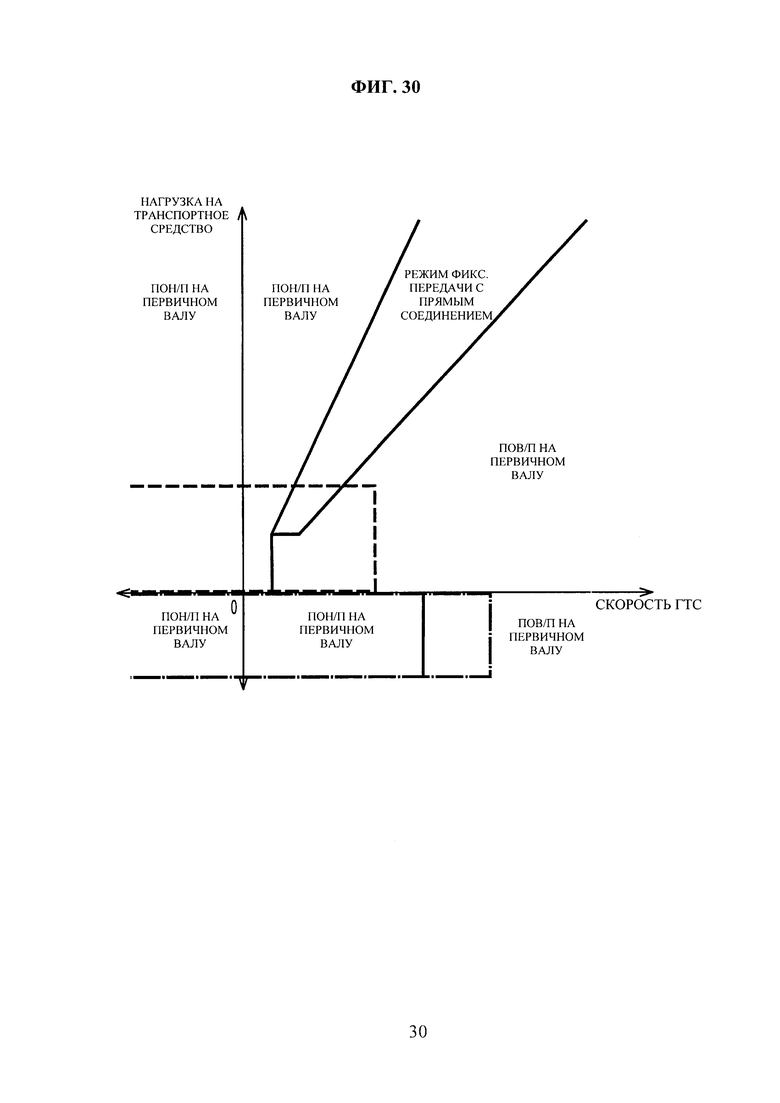

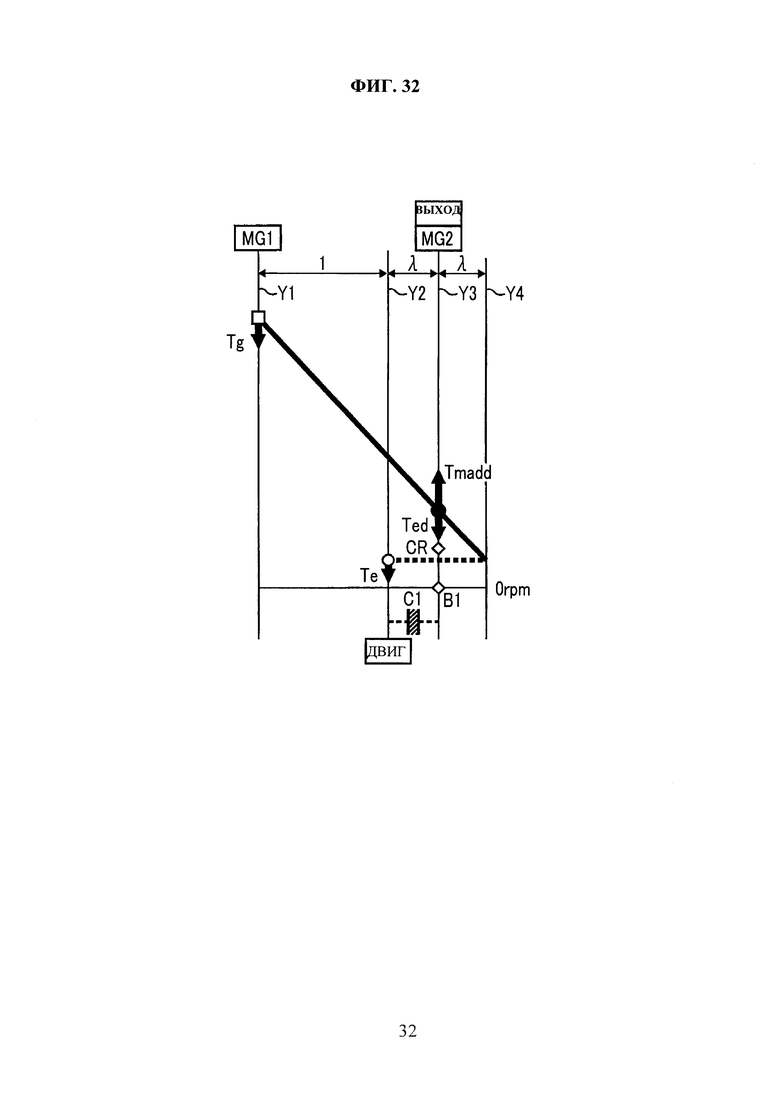


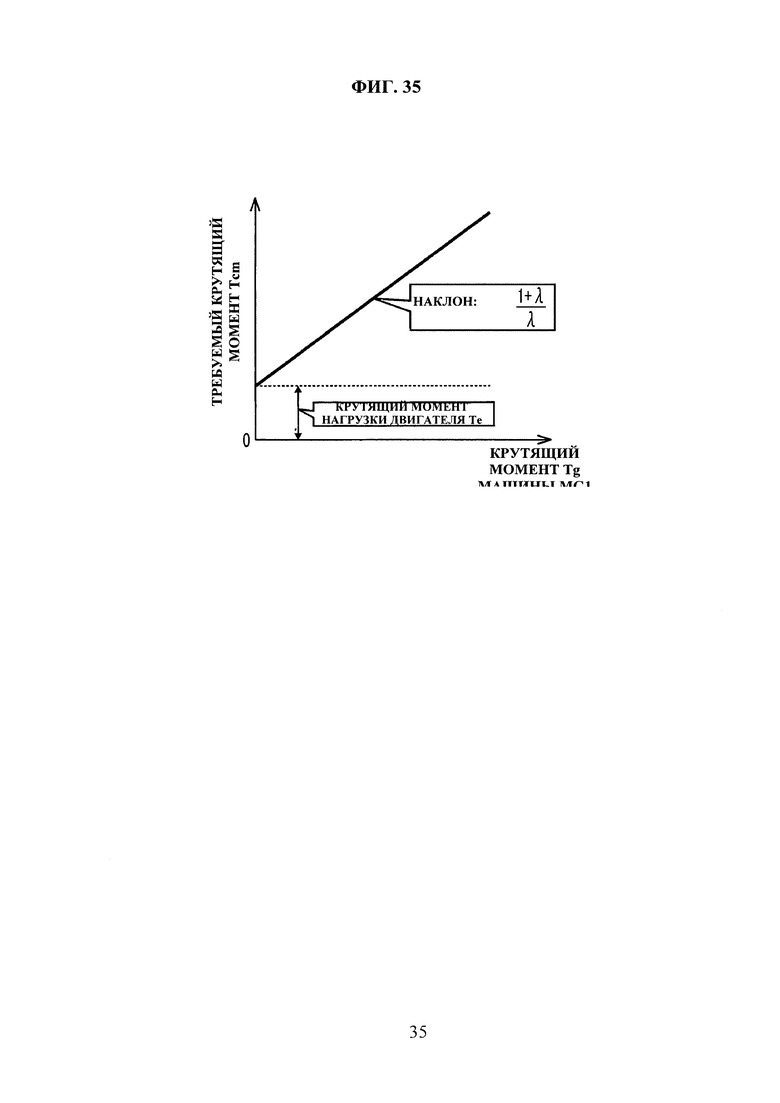
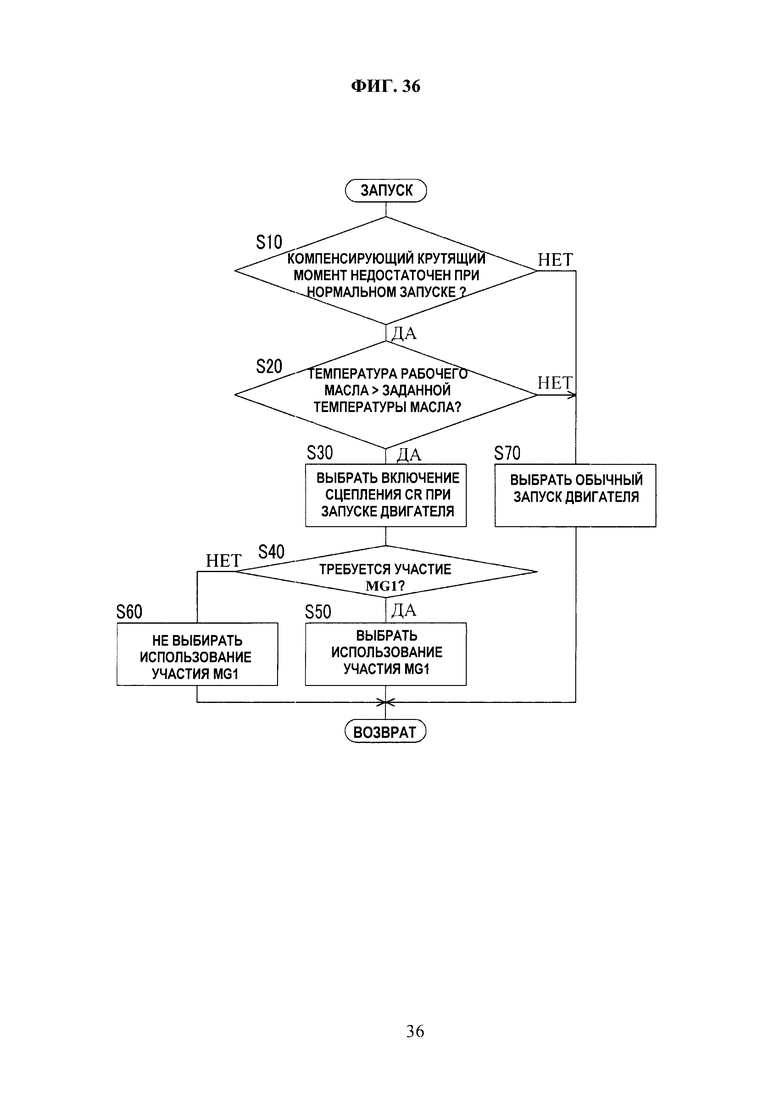
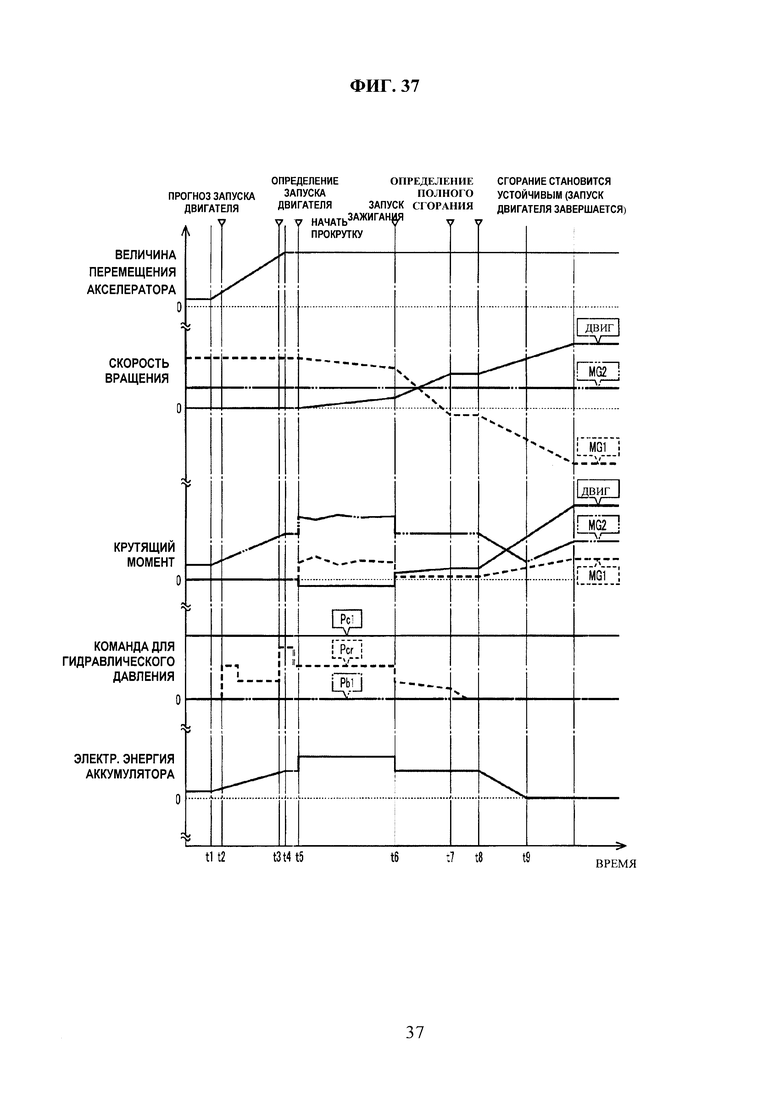
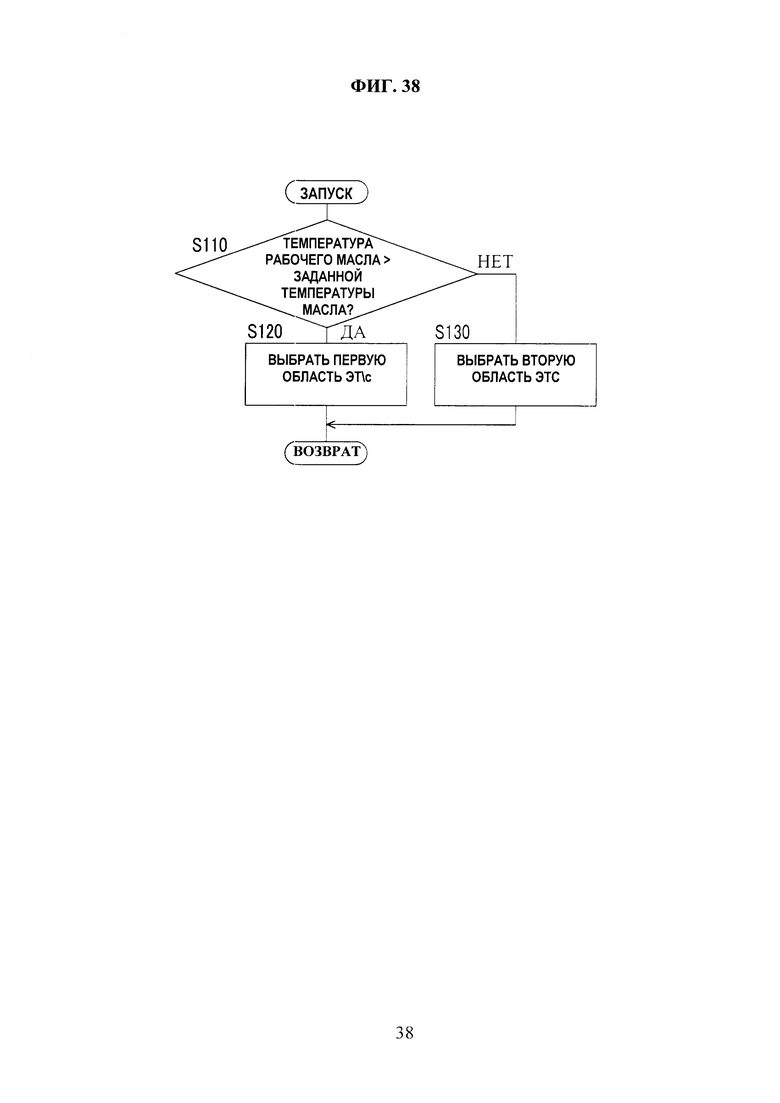
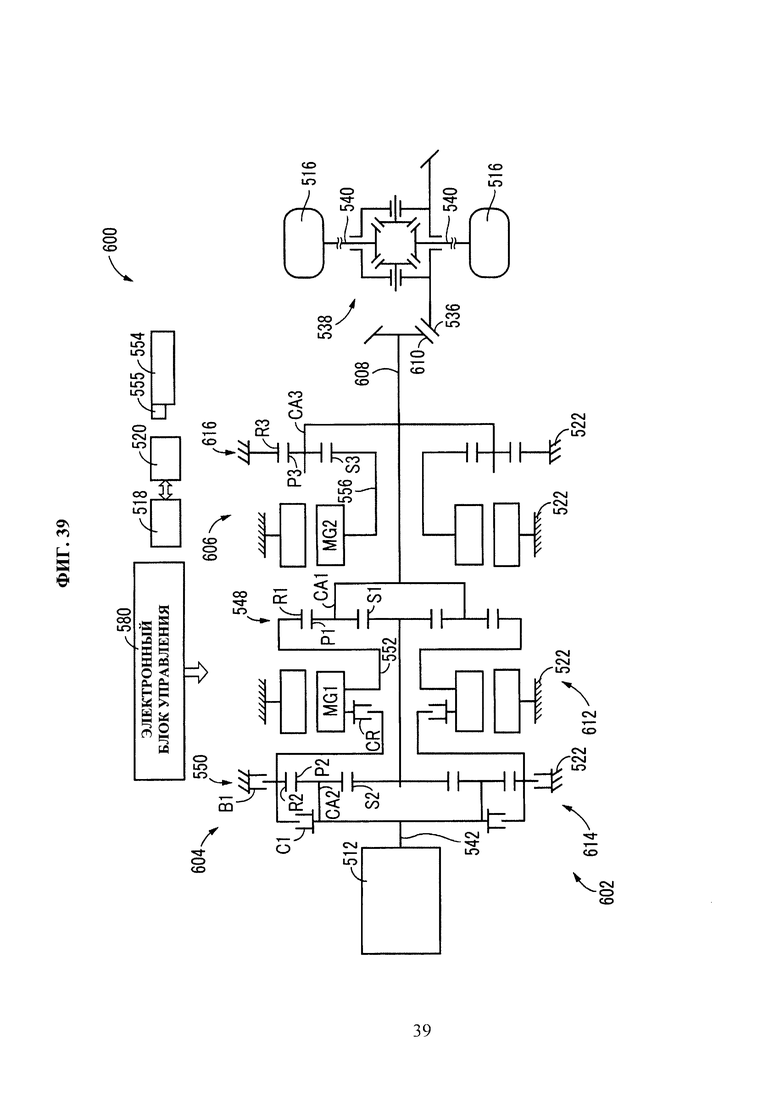
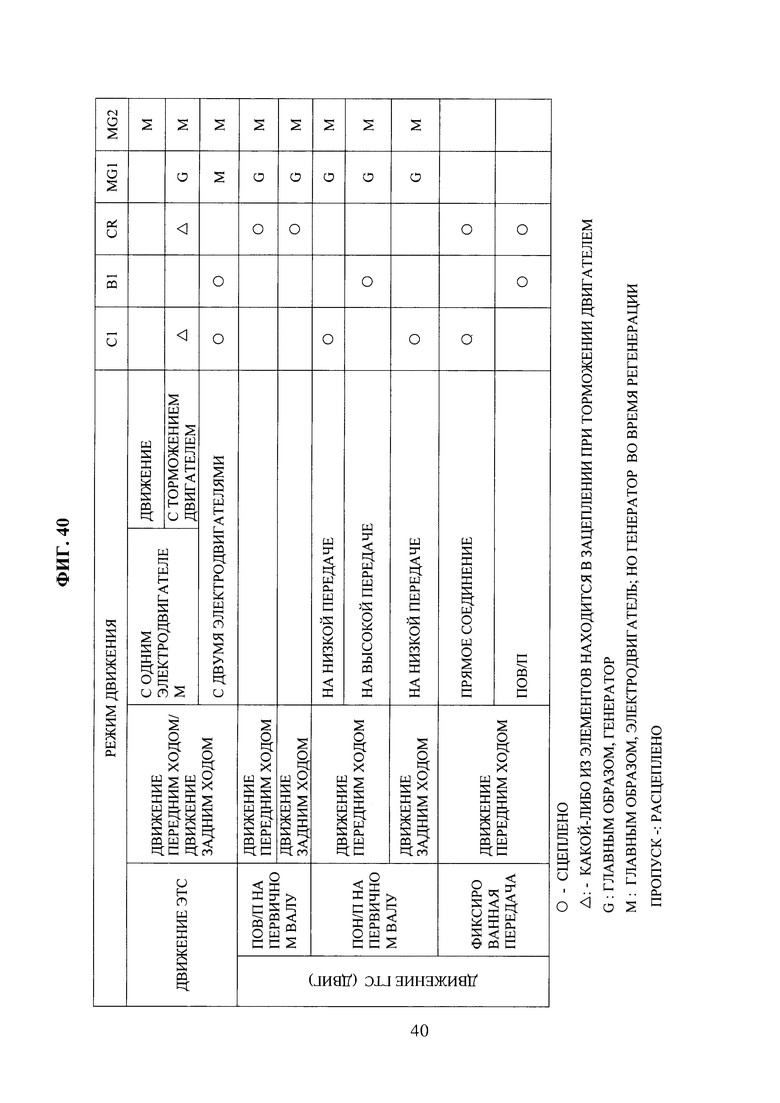
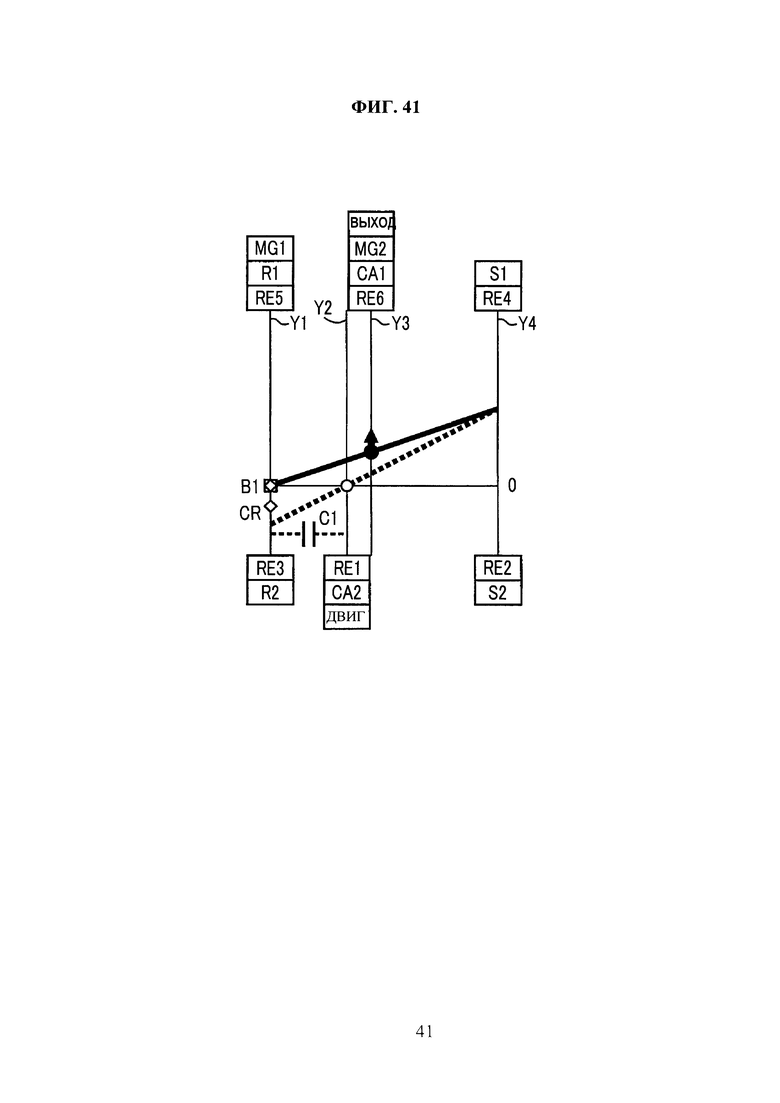
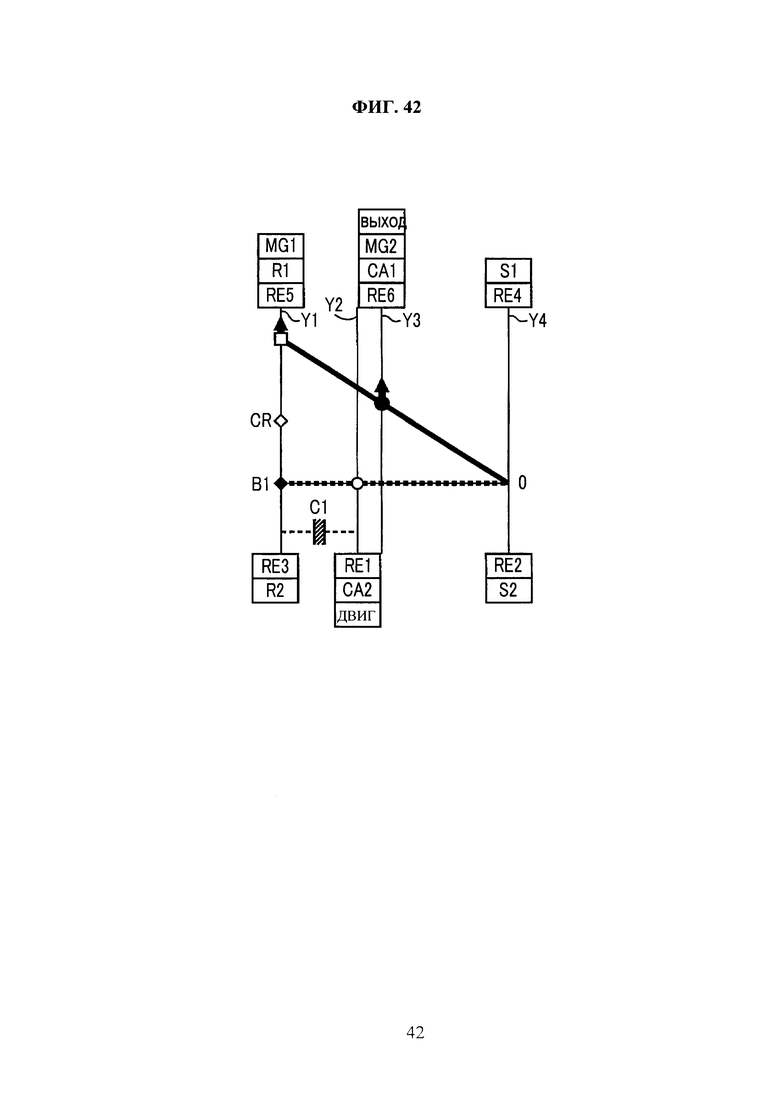
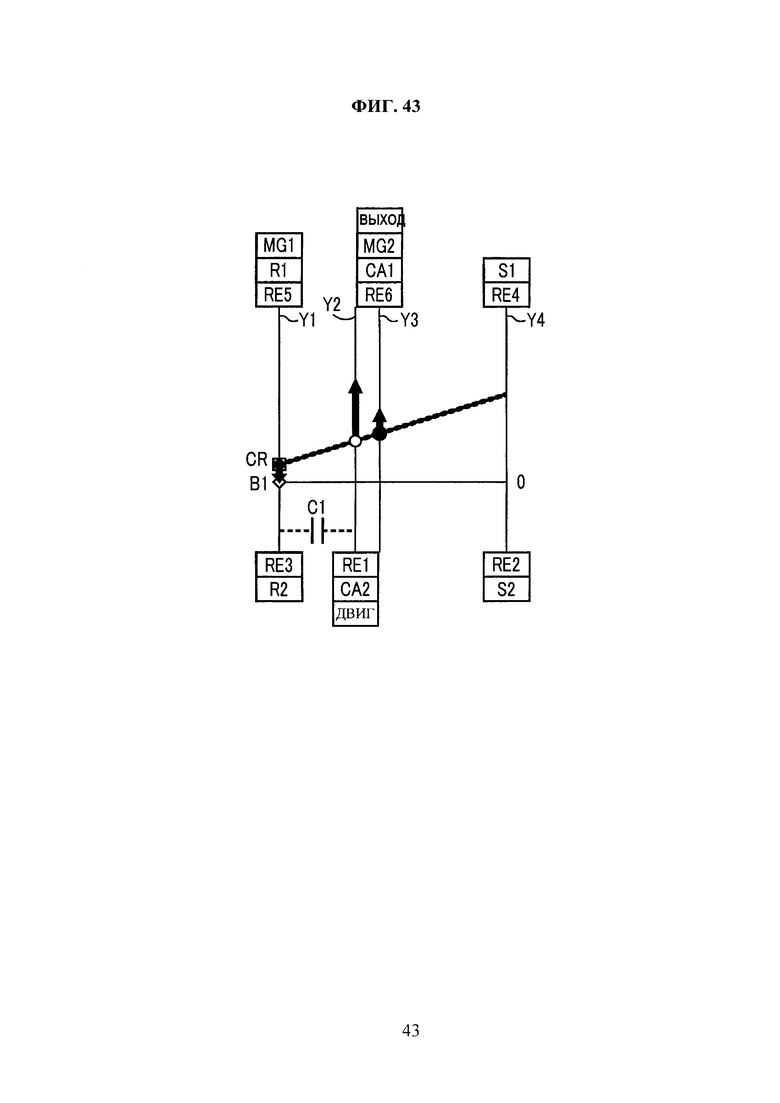
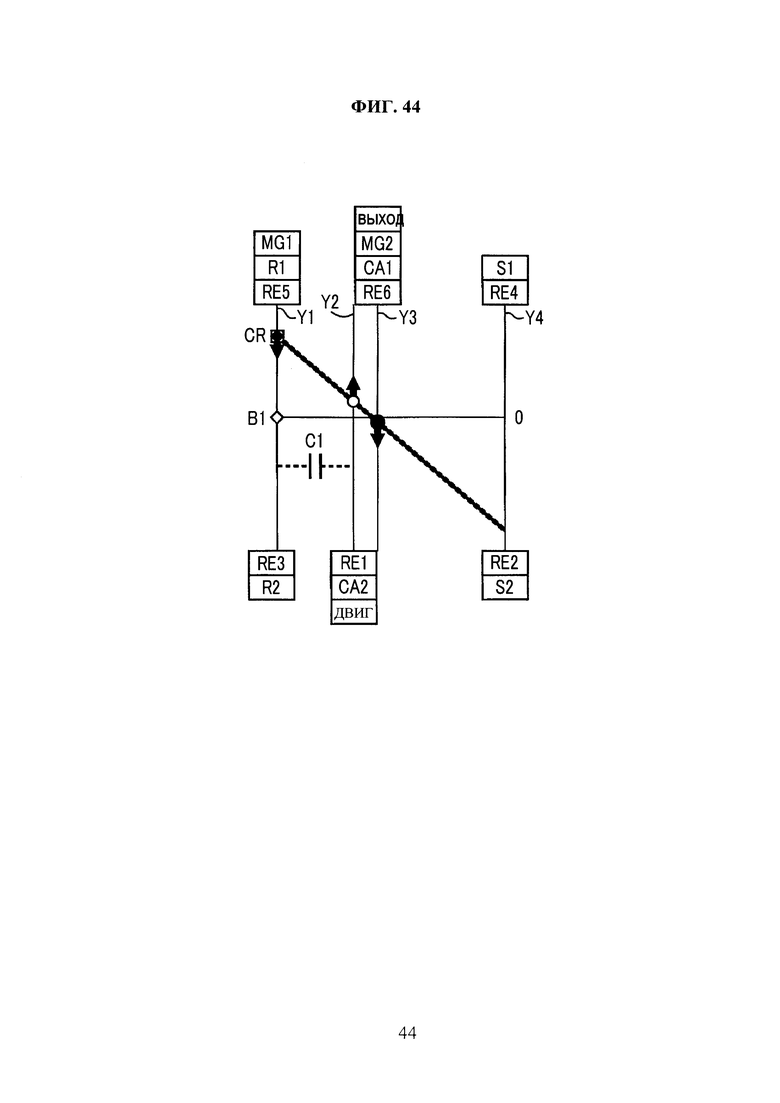
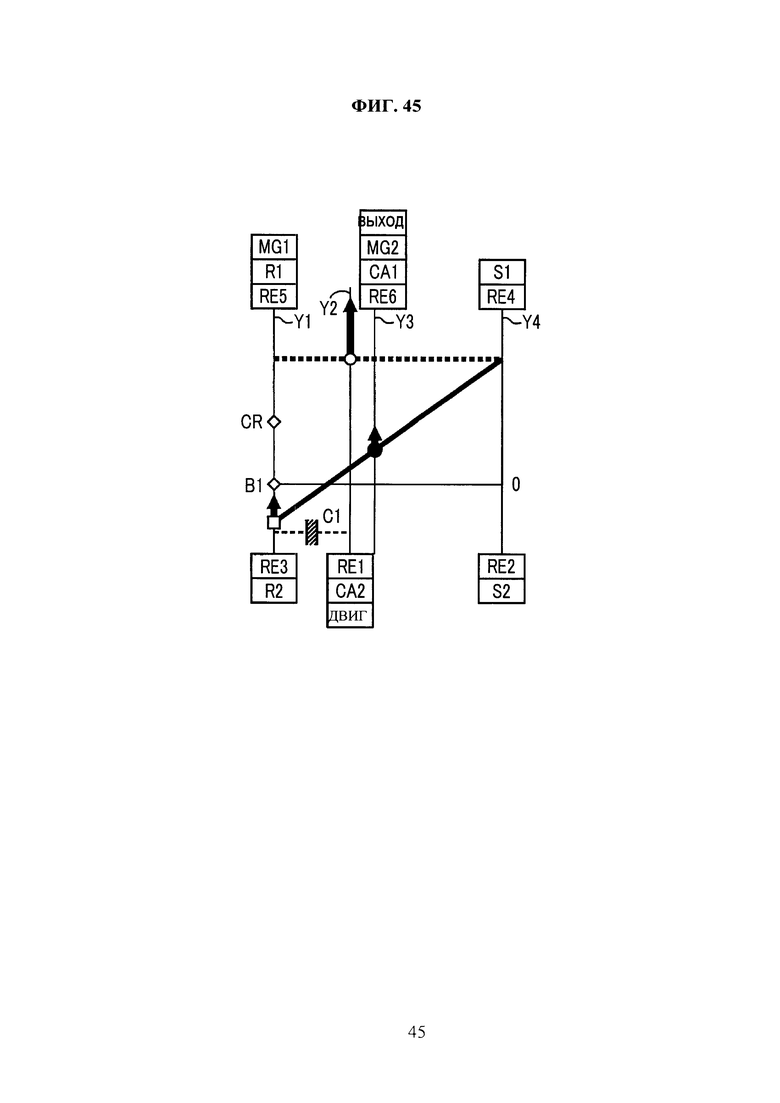
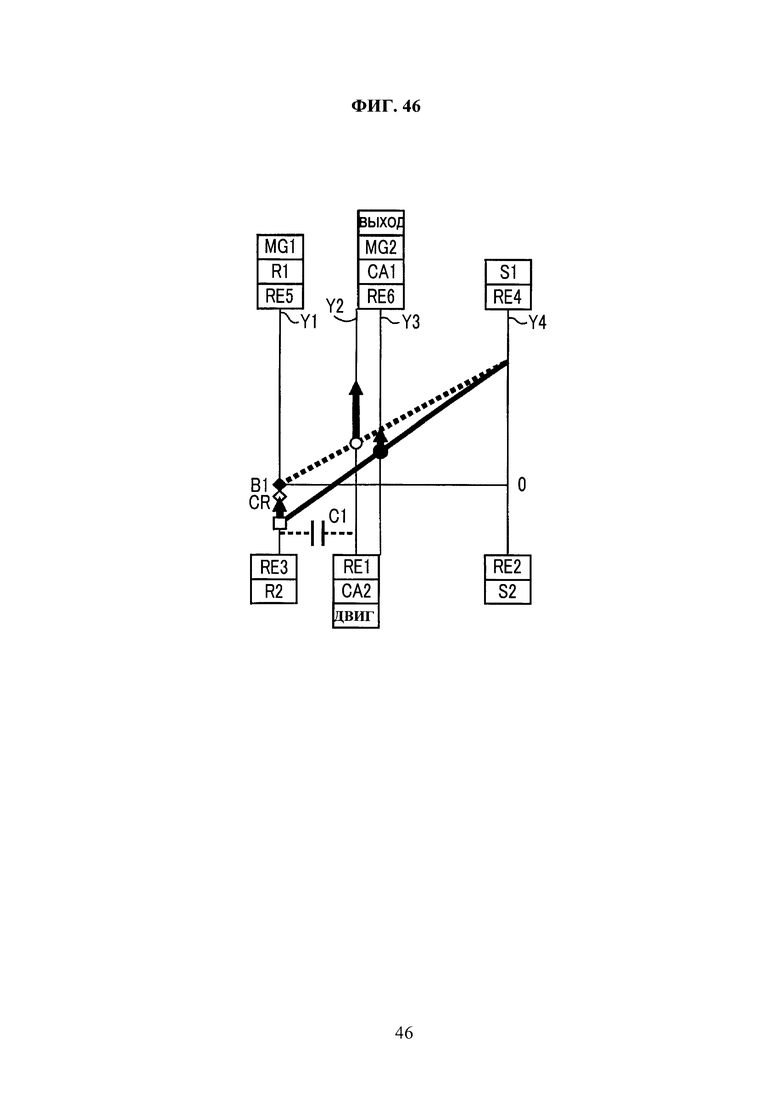
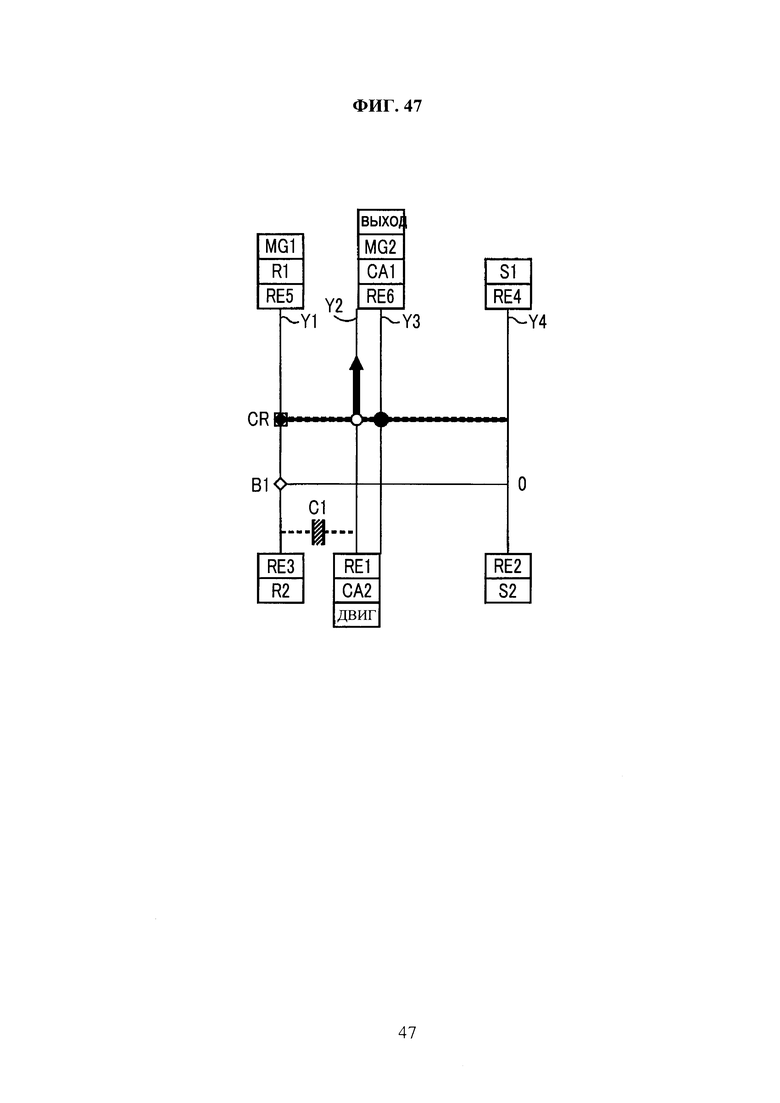
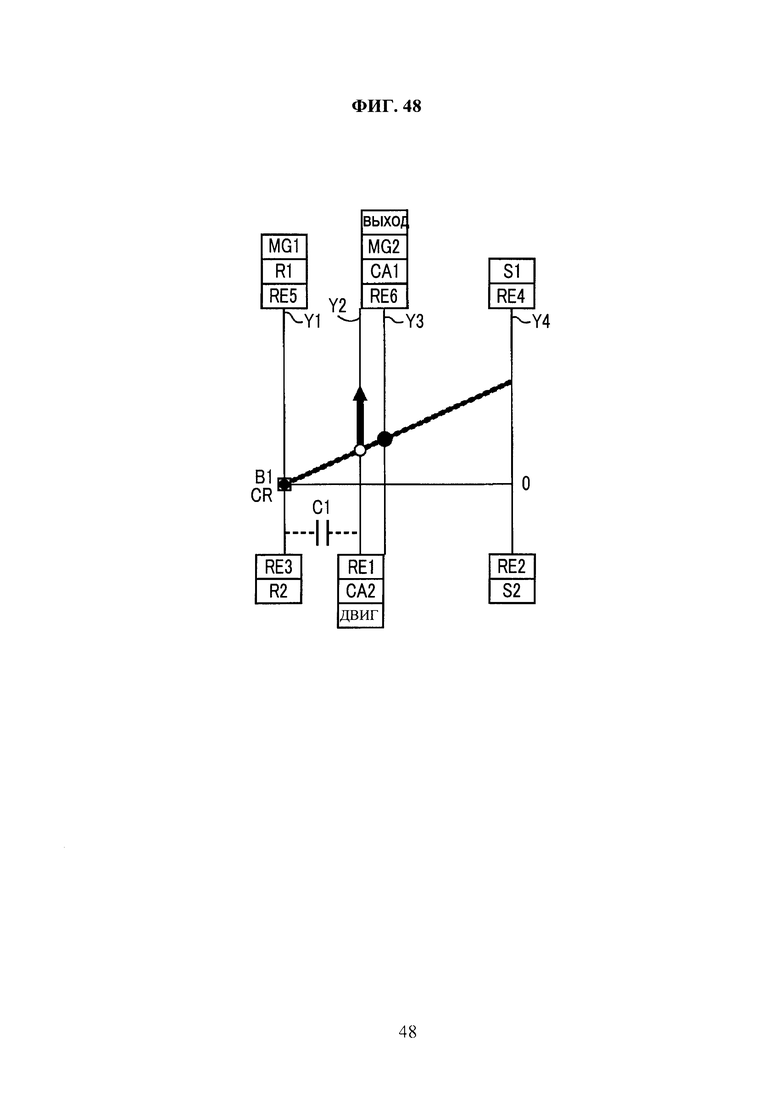
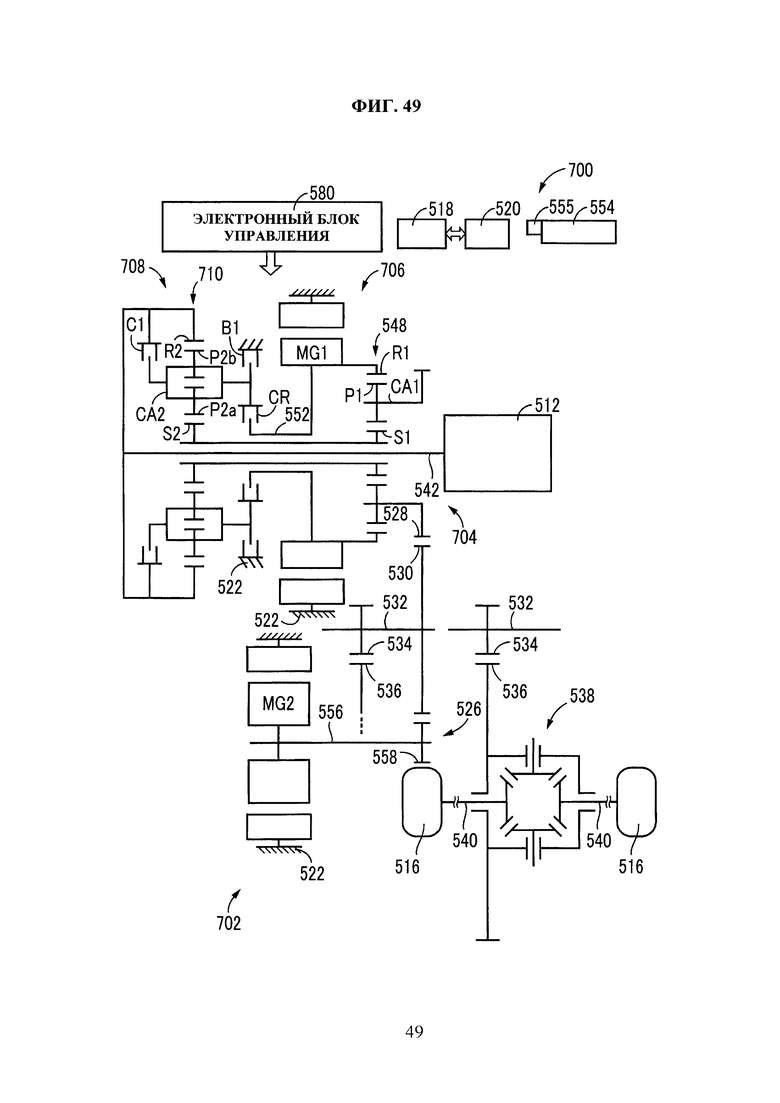
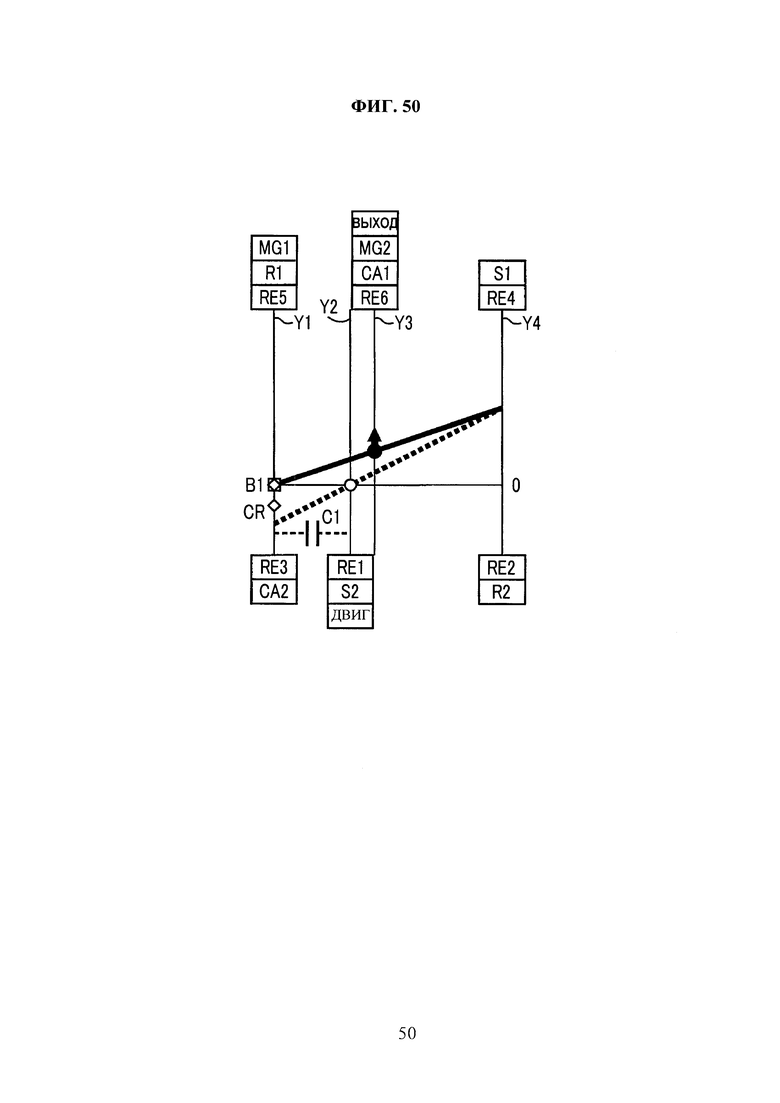
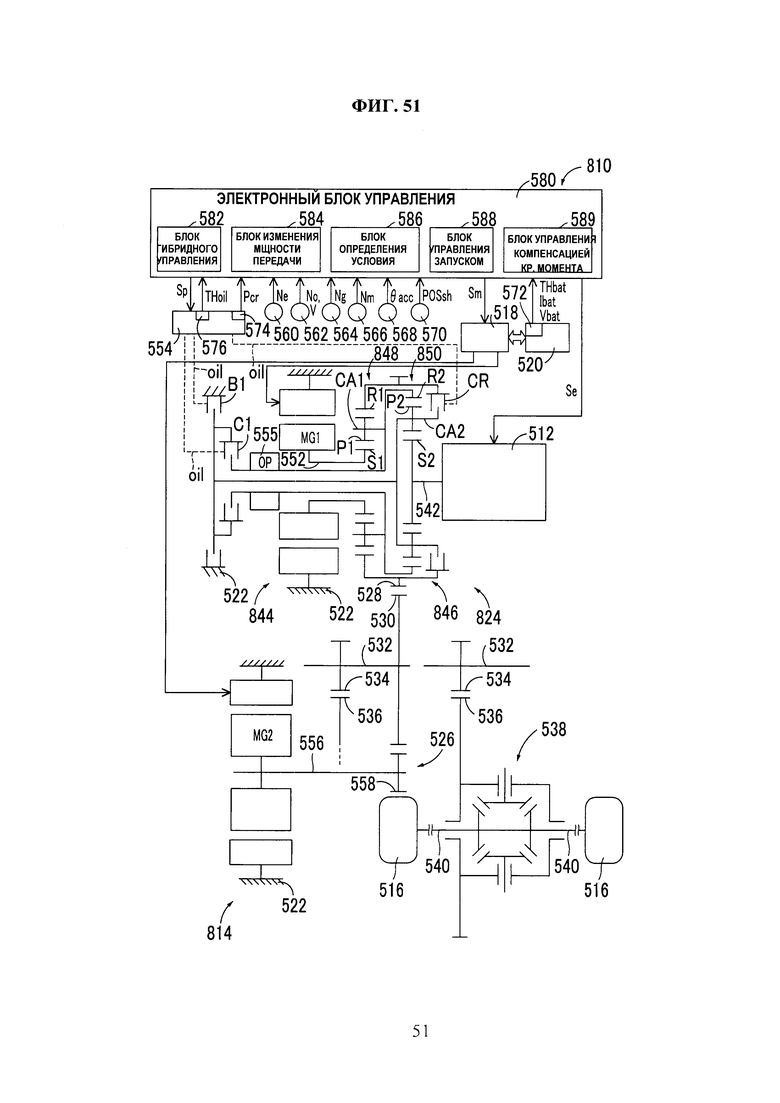
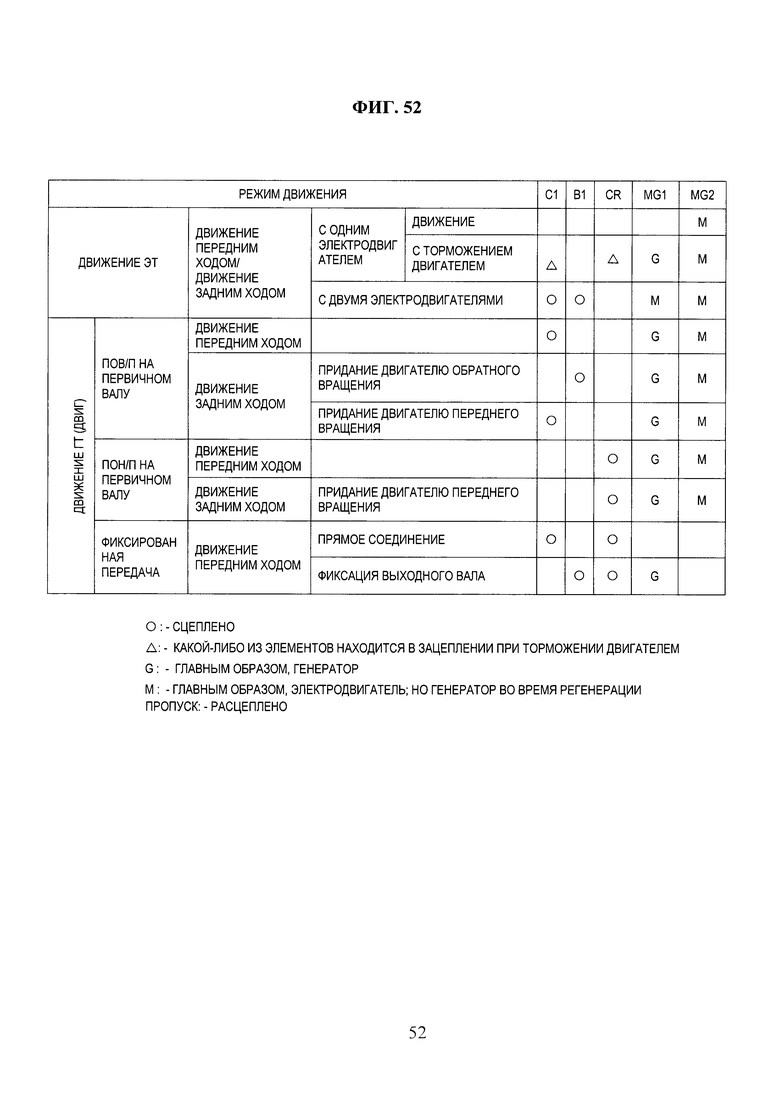
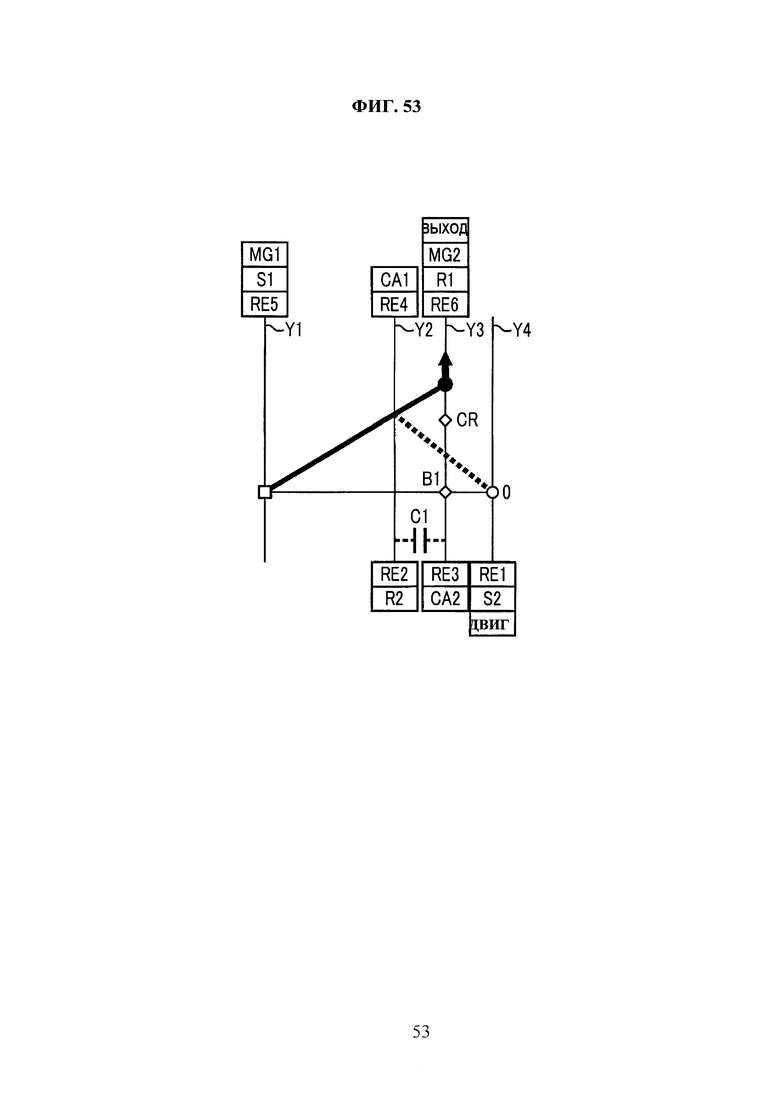
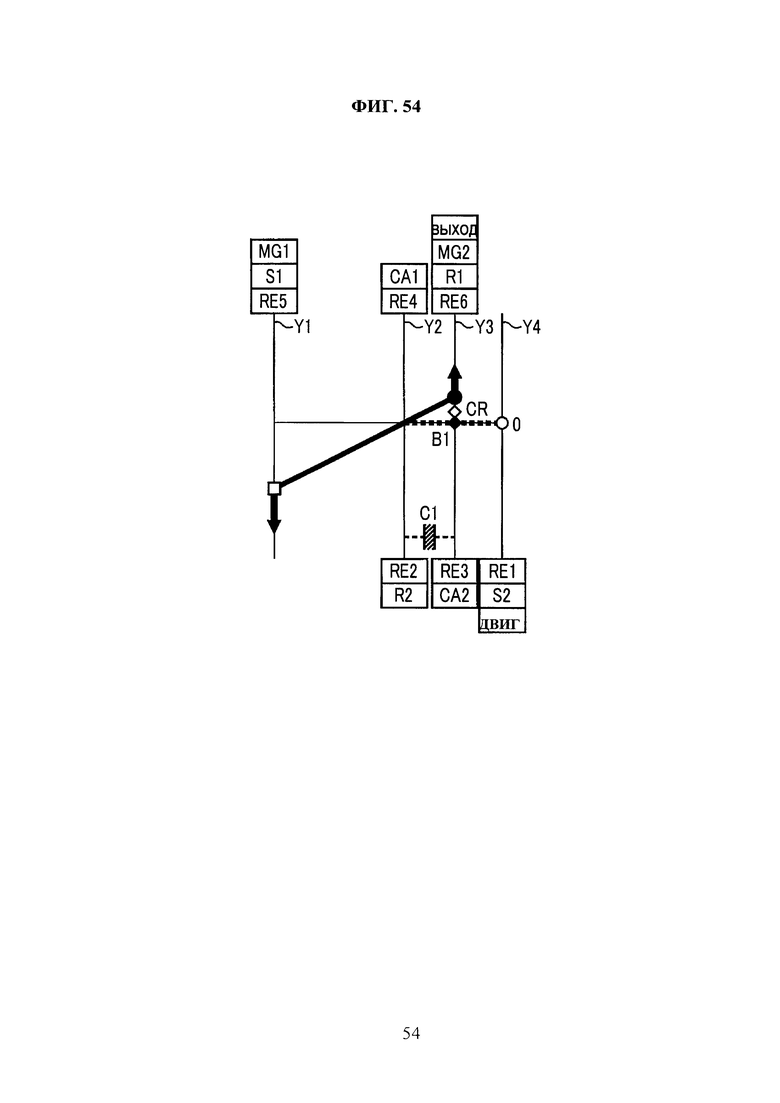
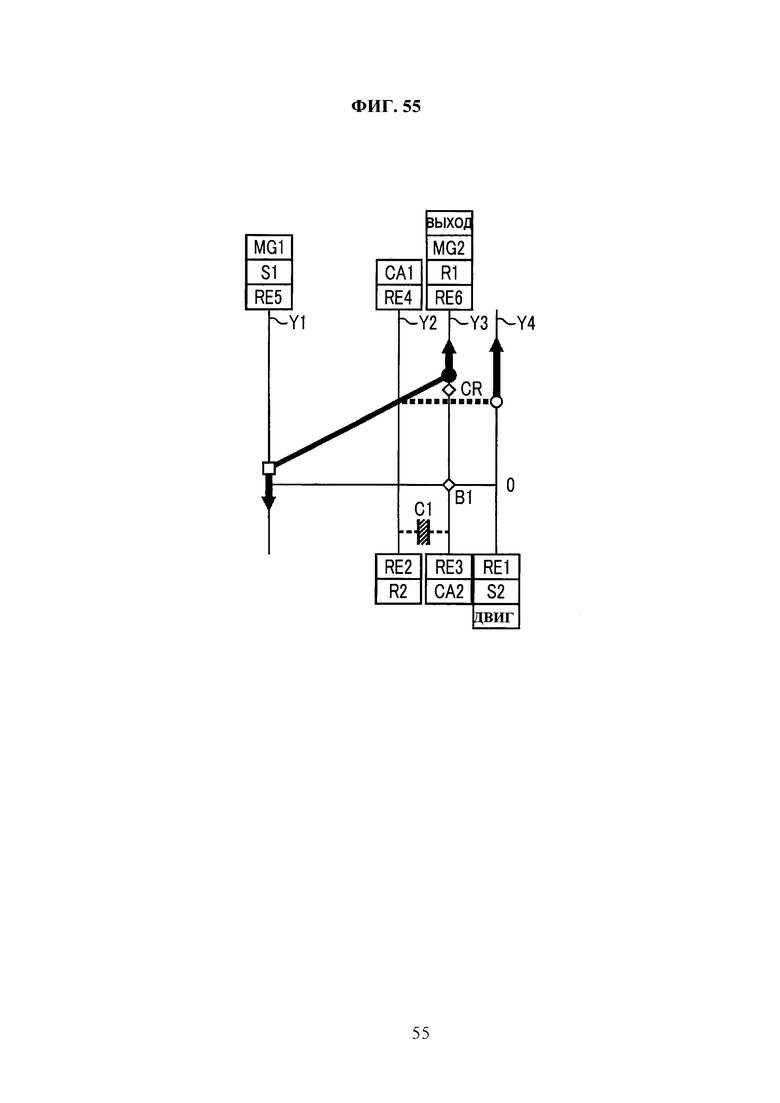
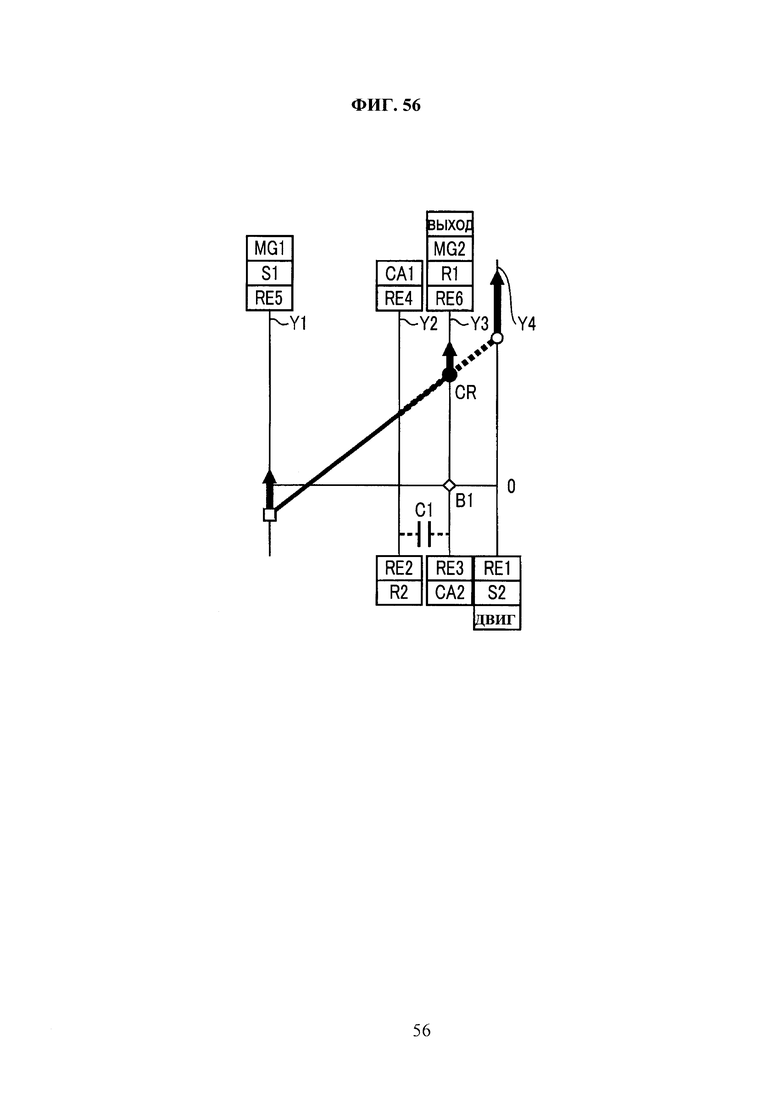

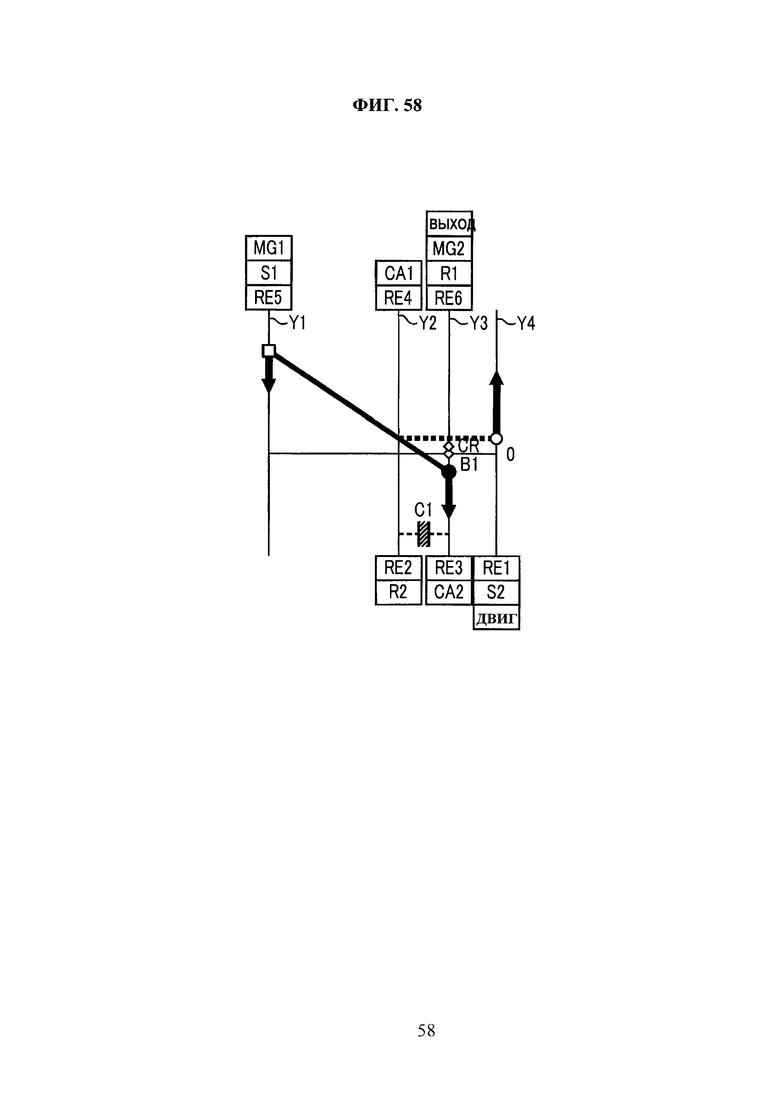

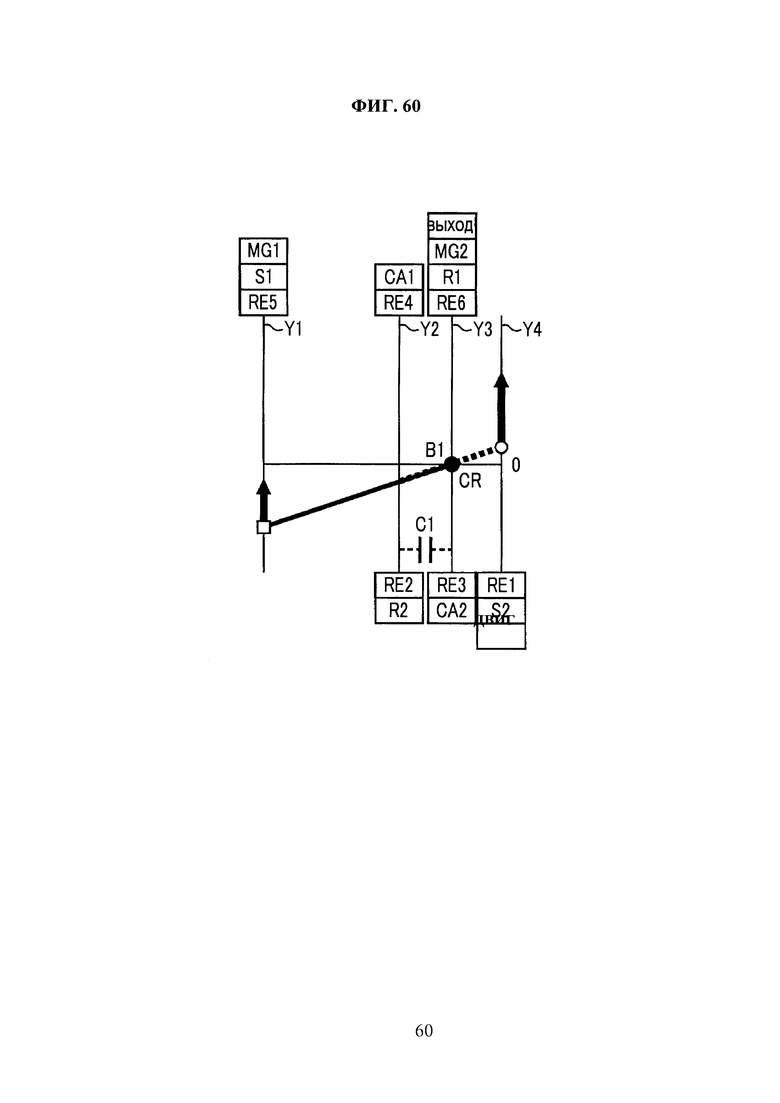
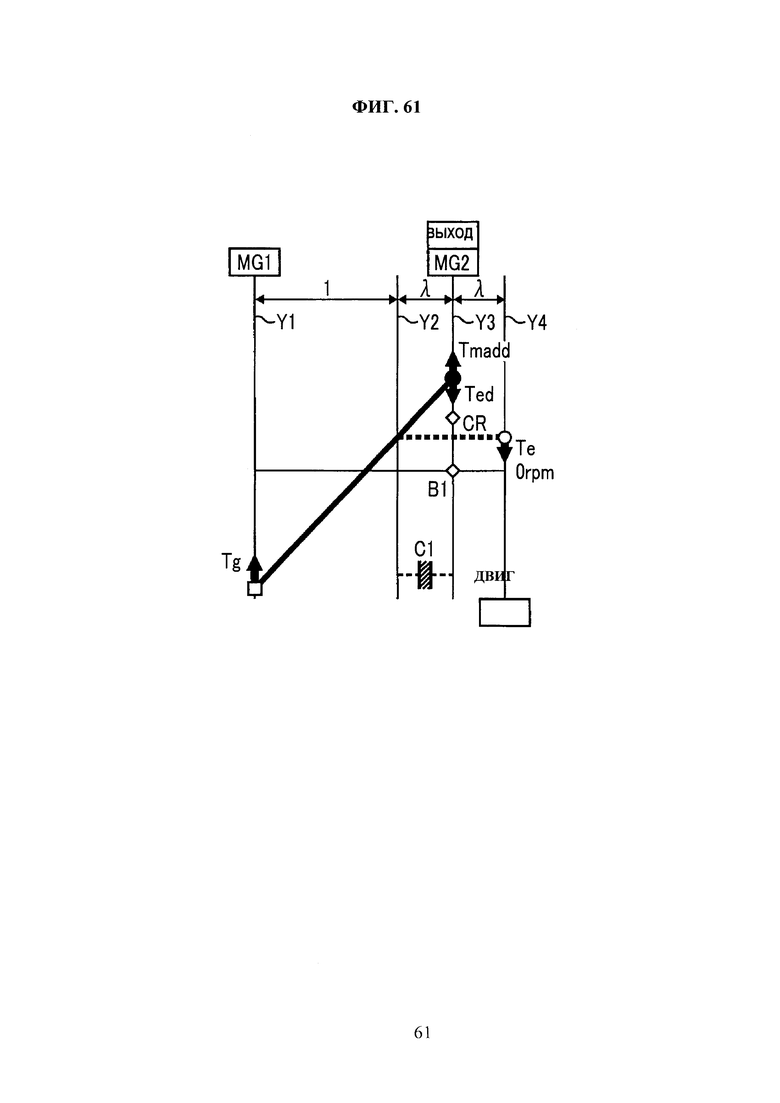
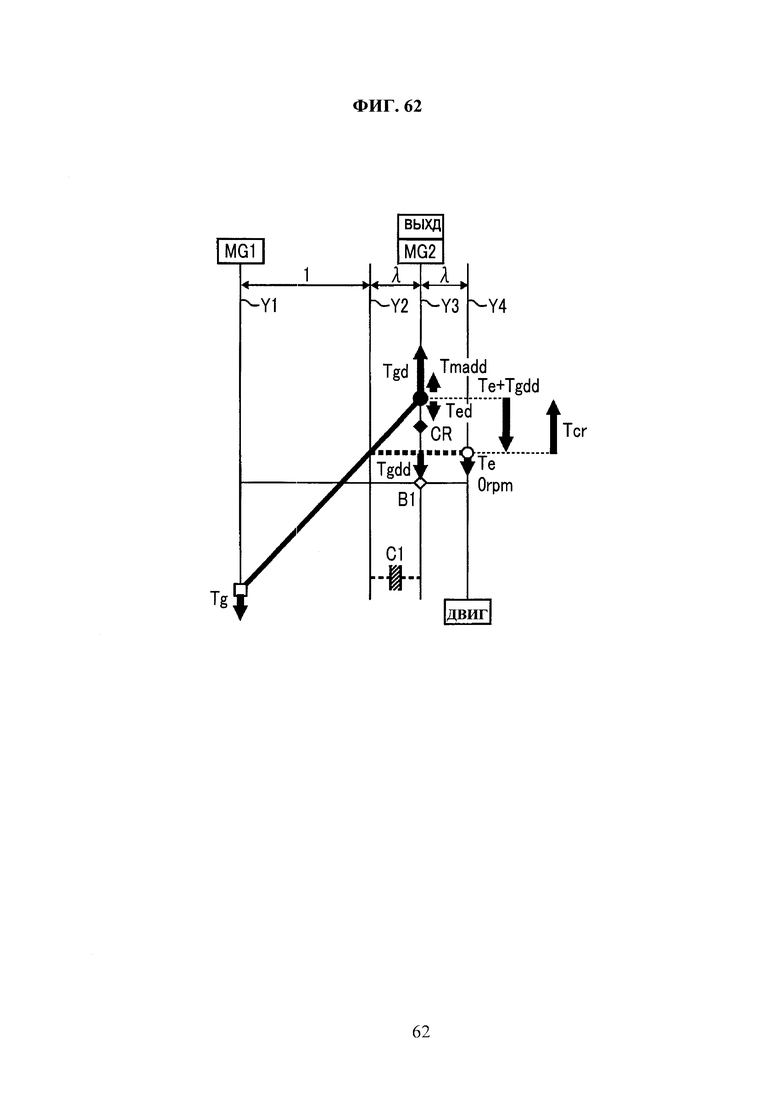
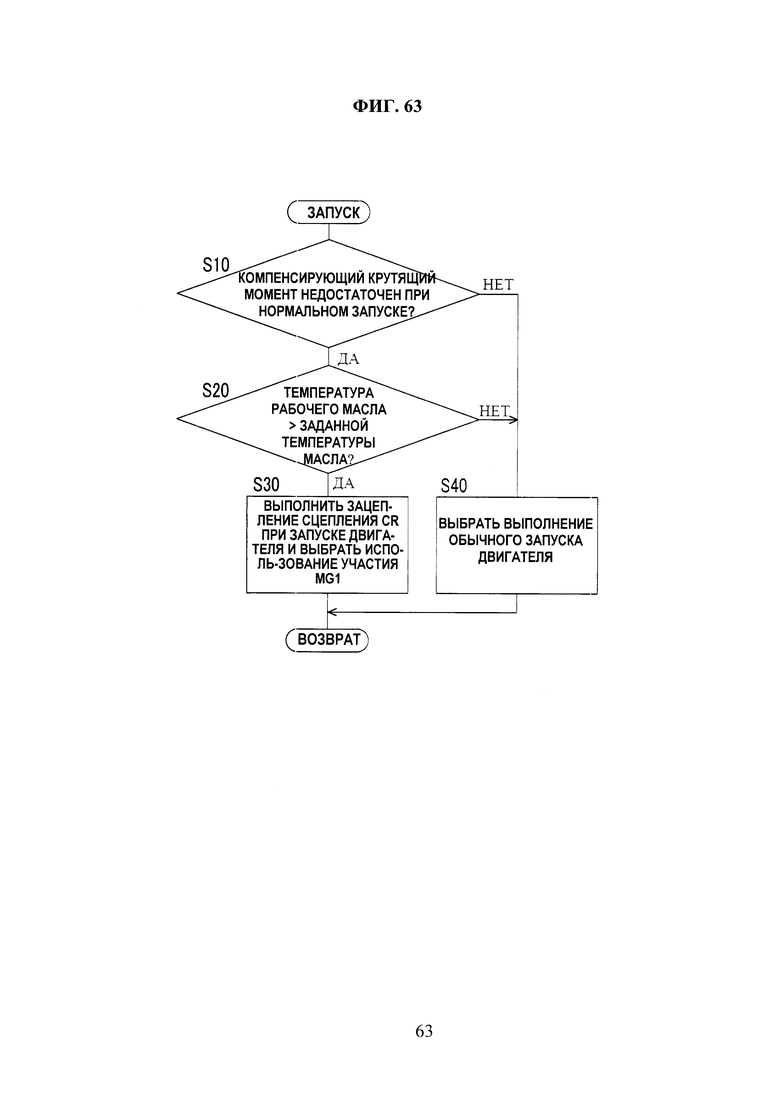
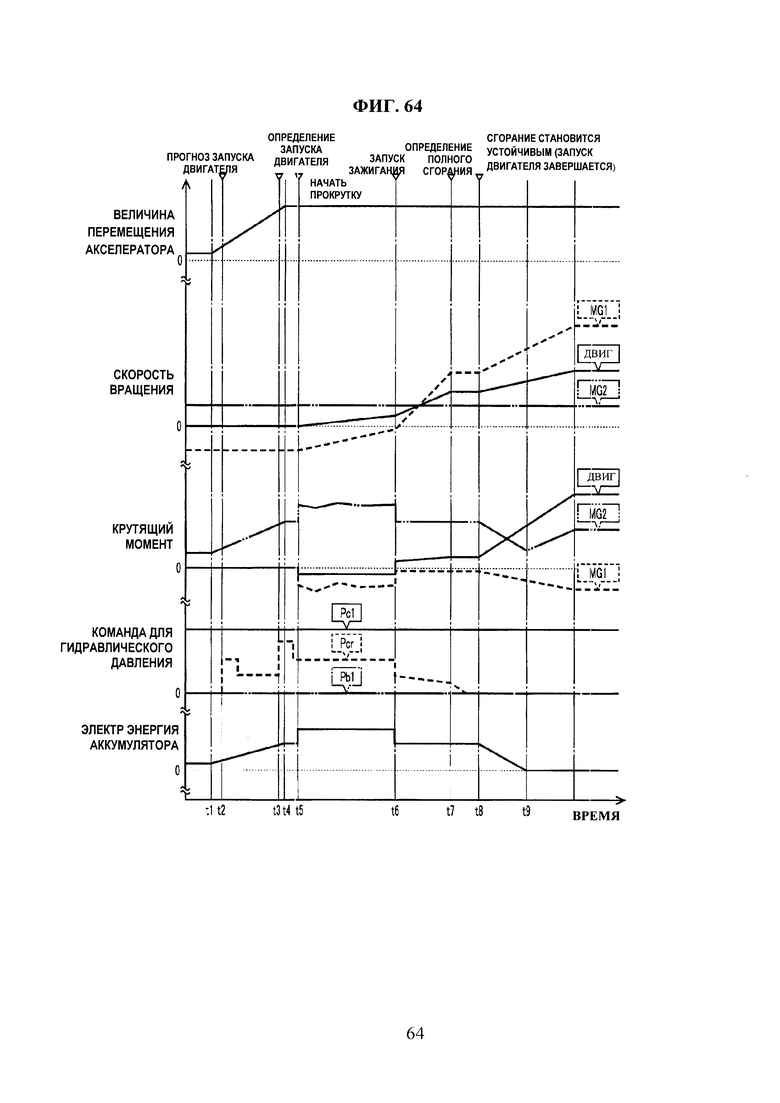
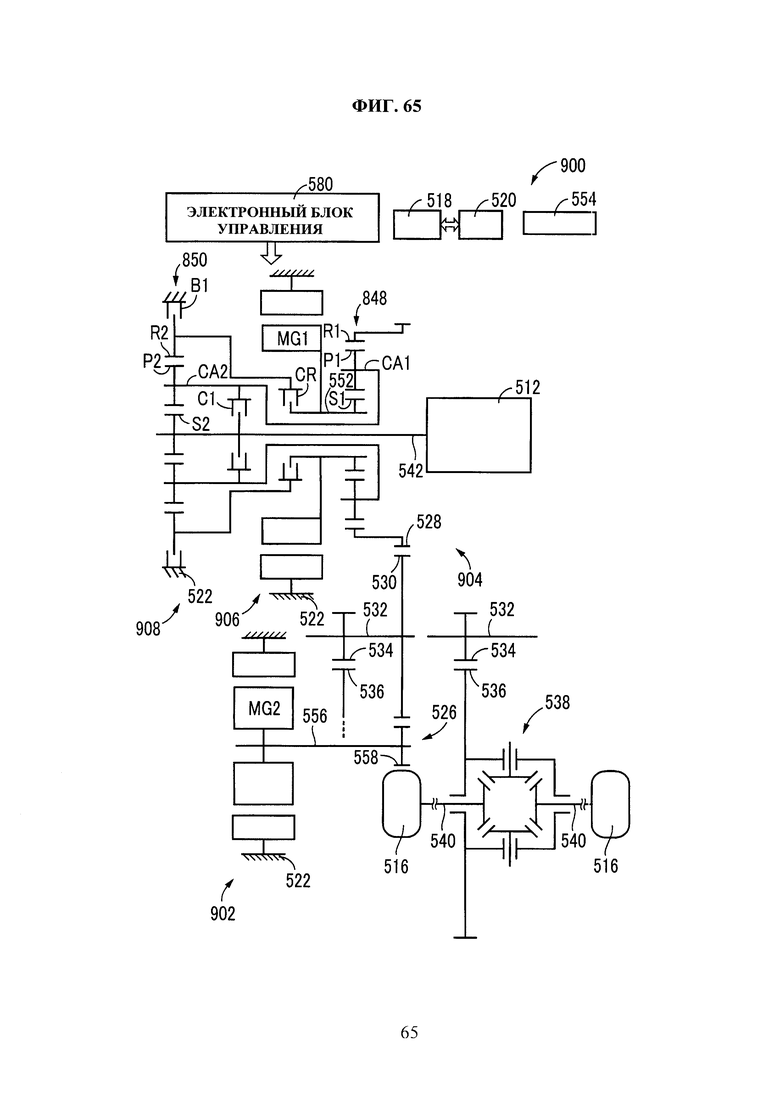
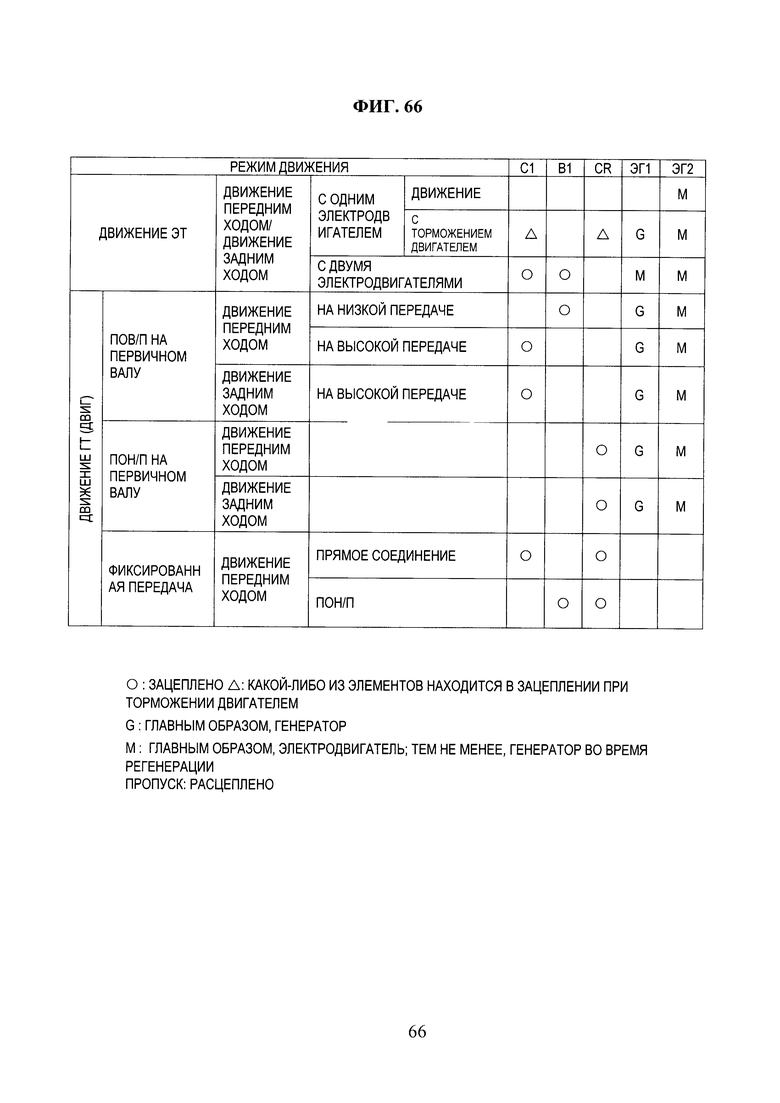
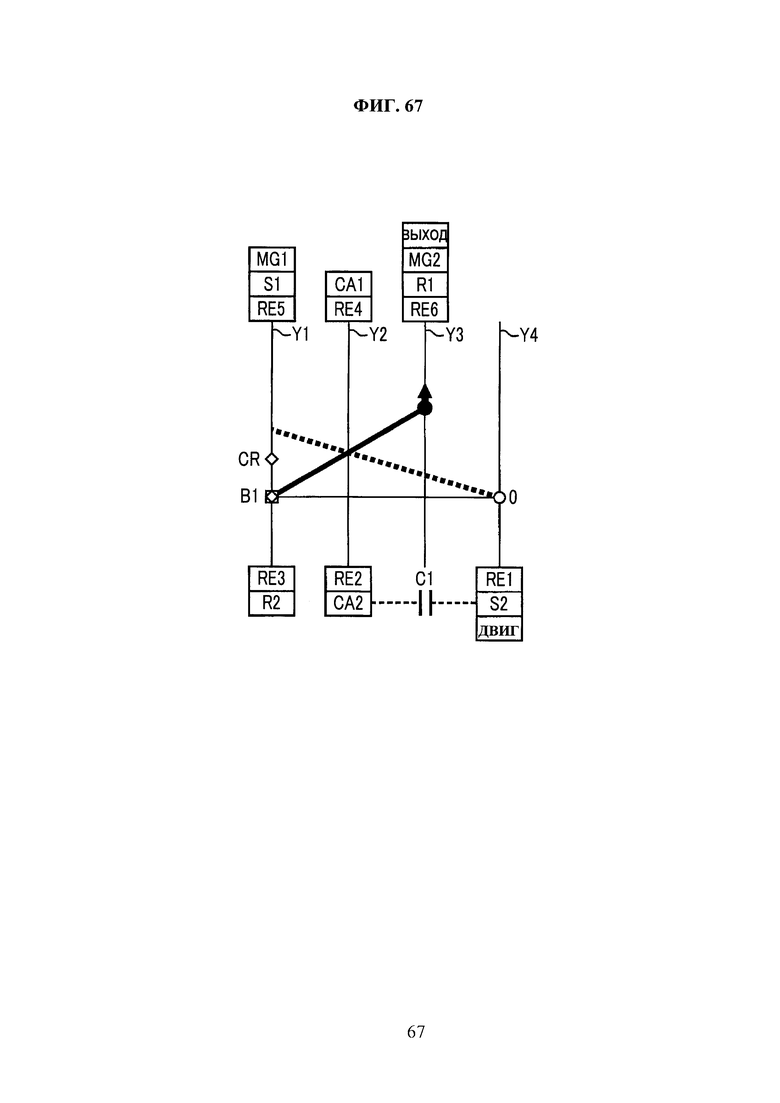
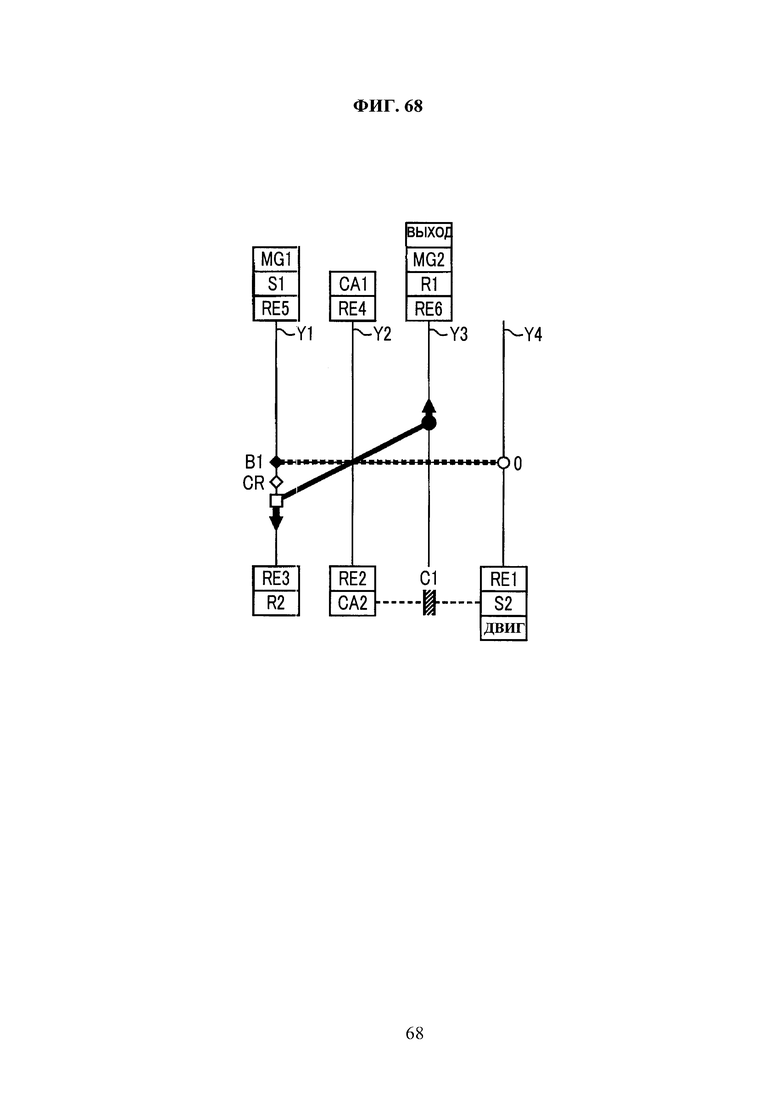
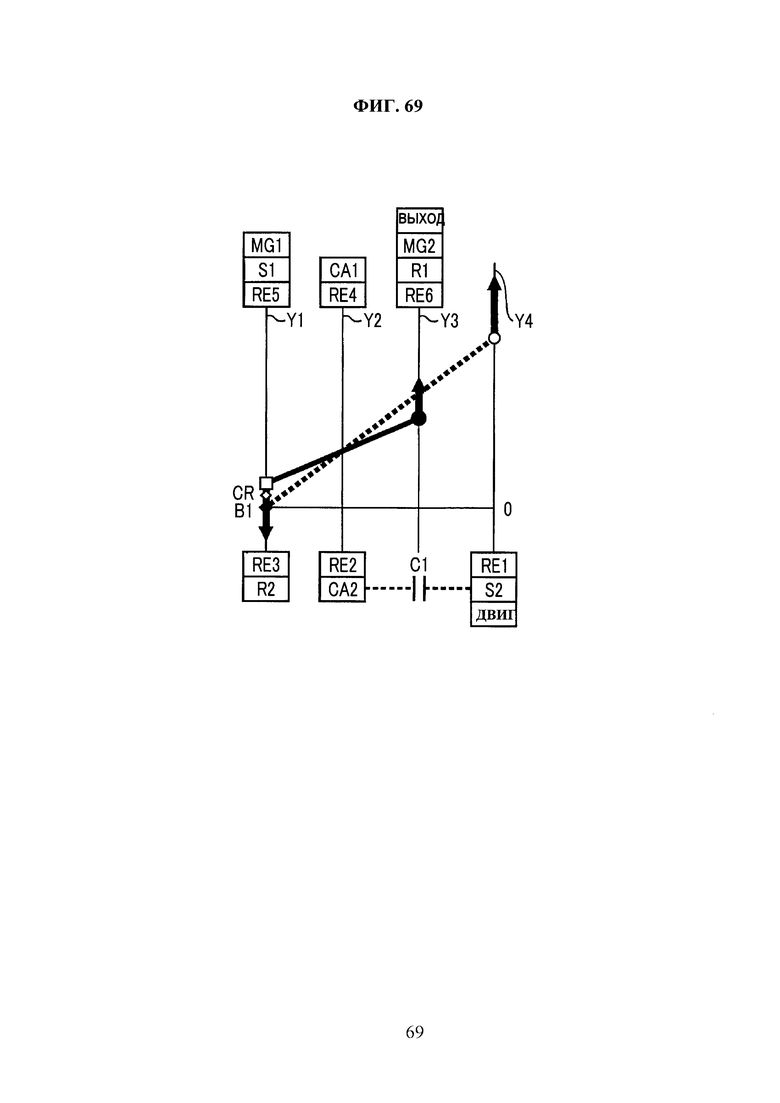
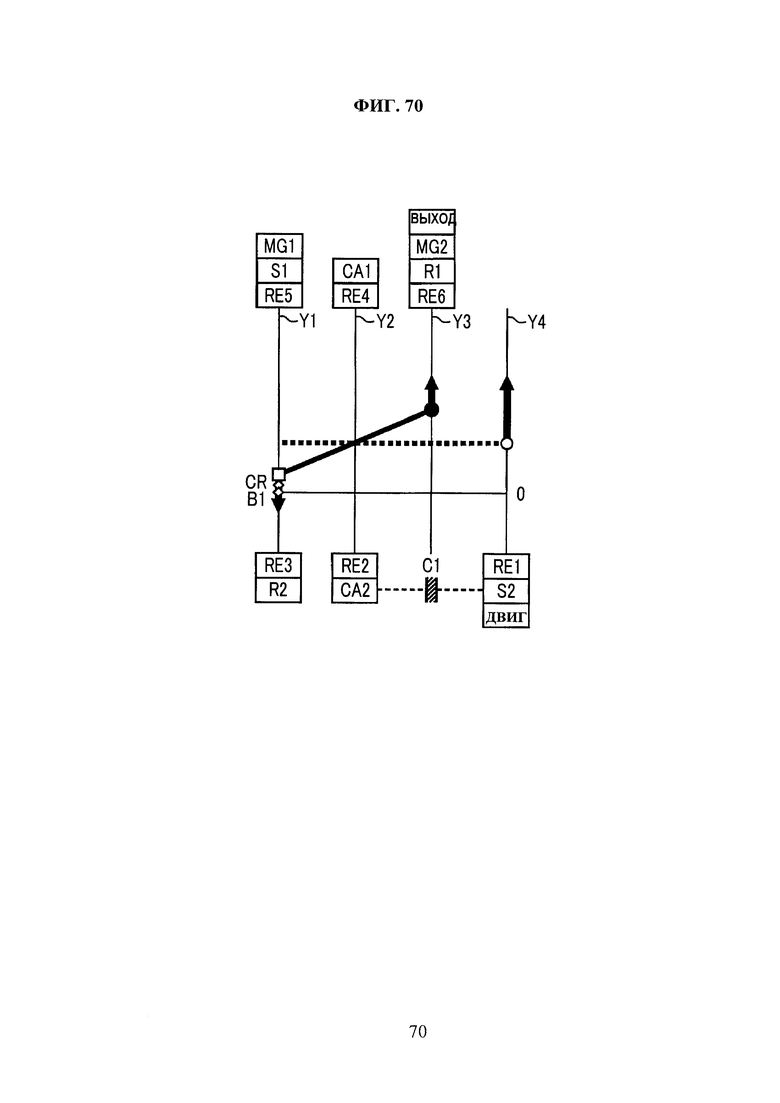
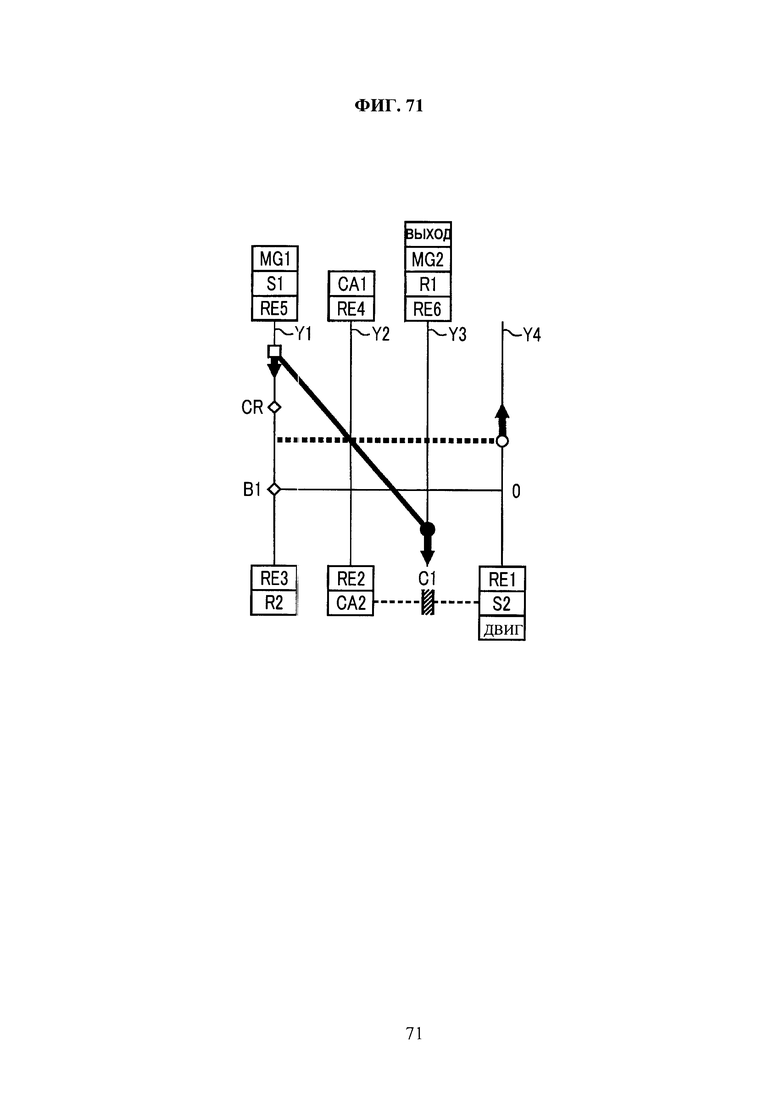
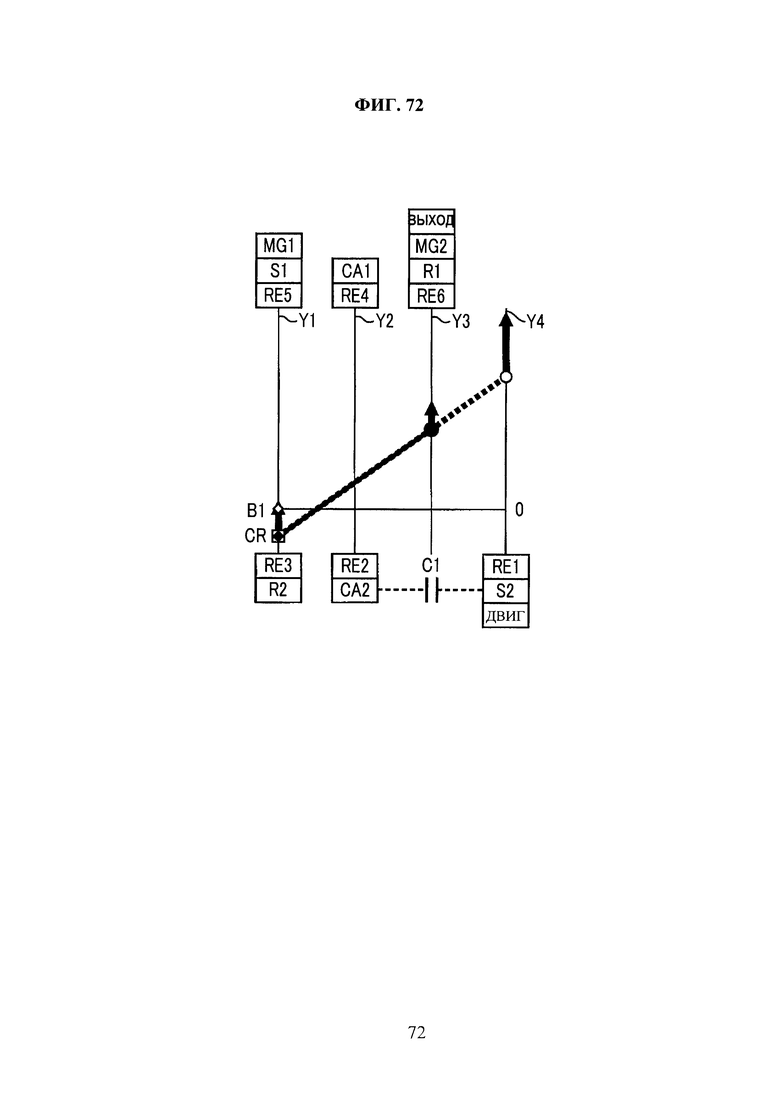
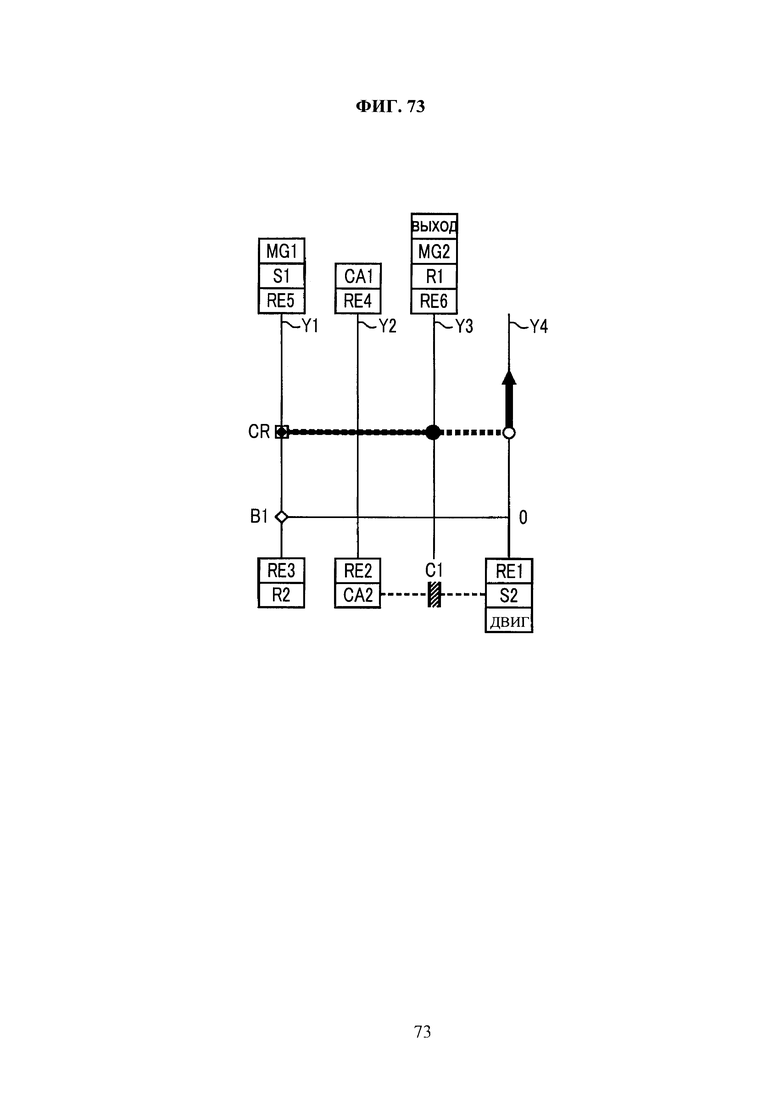
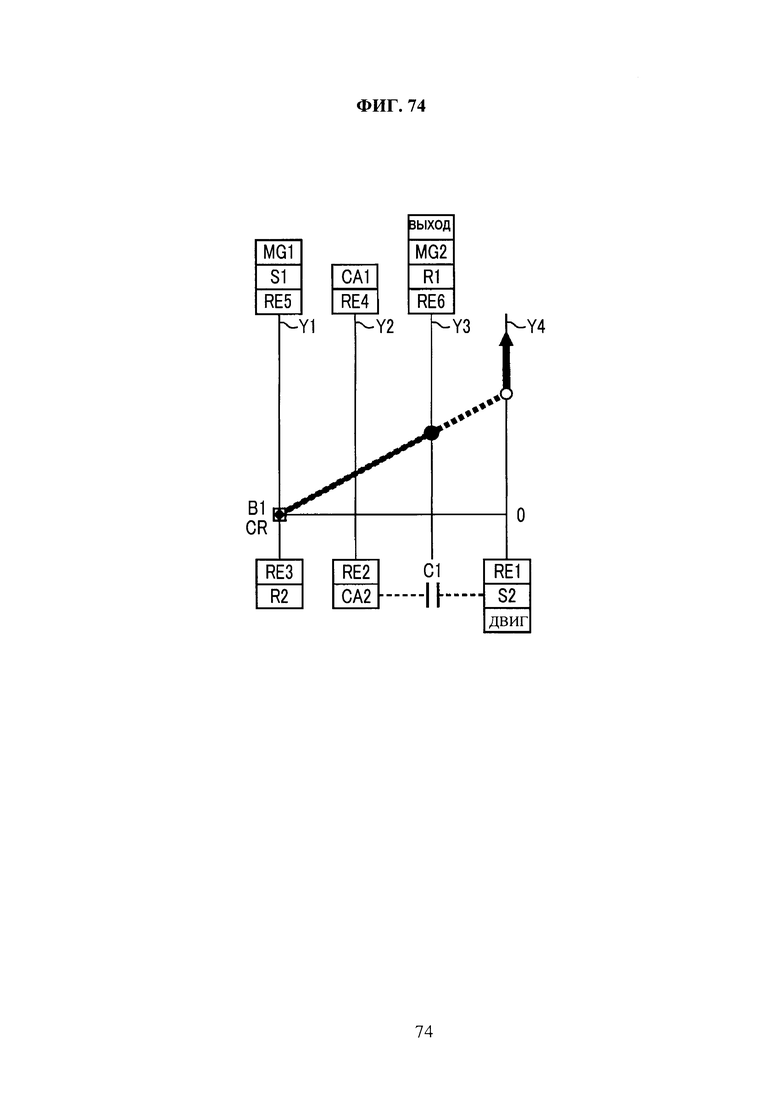
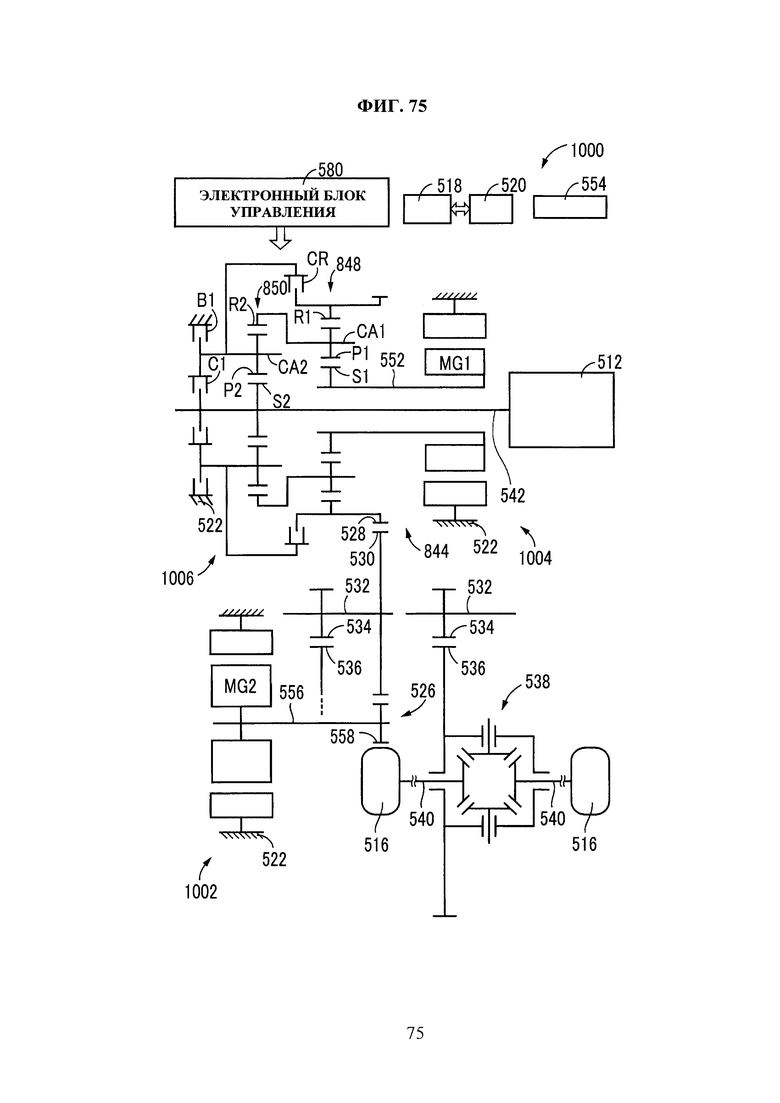
Изобретение относится к системам передач гибридных транспортных средств. Система (ТМ1) передачи мощности включает первый дифференциальный механизм (10), соединенный с двигателем, и второй дифференциальный механизм (20). Первый дифференциальный механизм включает первый вращающийся элемент, соединенный с двигателем, второй и третий вращающиеся элементы. Второй дифференциальный механизм включает четвертый вращающийся элемент, соединенный со вторым вращающимся элементом, пятый вращающийся элемент, соединенный с первой вращающейся электрической машиной (MG1), шестой вращающийся элемент, который представляет собой выходной элемент второго дифференциального механизма. Система передачи мощности дополнительно включает первое сцепление (CL1), тормоз (BL1) и второе сцепление (CLr). Первое сцепление сконфигурировано с возможностью формировать пару для разъемного соединения двух элементов из следующих - первого, второго и третьего вращающихся элементов. Тормоз выполнен с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом. Второе сцепление выполнено с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с пятым или шестым вращающимися элементами. Достигается повышение экономичности и надежности. 3 н. и 25 з.п. ф-лы, 75 ил. 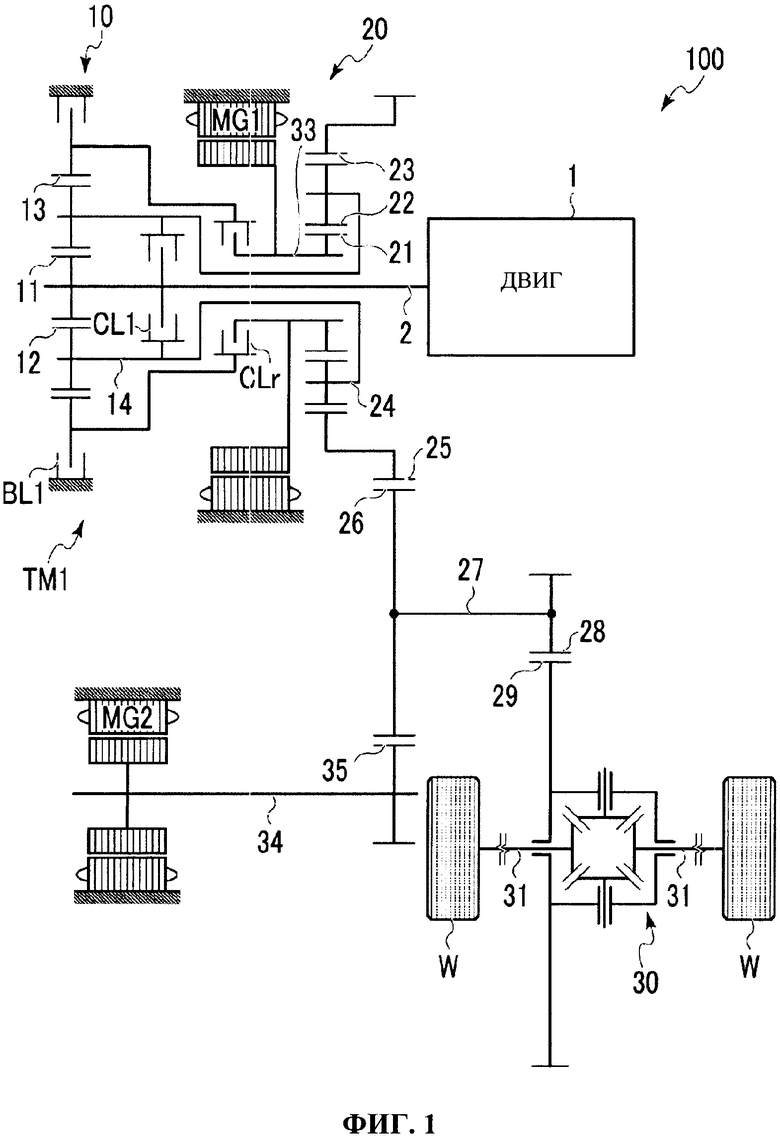
1. Система передачи мощности для передачи мощности от двигателя, при этом система передачи мощности характеризуется тем, что содержит:
первый дифференциальный механизм, соединенный с двигателем, первый дифференциальный механизм, включающий в себя первый вращающийся элемент, второй вращающийся элемент и третий вращающийся элемент, причем первый вращающийся элемент соединен с двигателем;
второй дифференциальный механизм, включающий в себя четвертый вращающийся элемент, пятый вращающийся элемент и шестой вращающийся элемент, при этом четвертый вращающийся элемент соединен со вторым вращающимся элементом первого дифференциального механизма, пятый вращающийся элемент соединен с первой вращающейся электрической машиной, шестой вращающийся элемент представляет собой выходной элемент;
первый блок сцепления, который является, по меньшей мере, одним из следующих: блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения друг с другом двух из следующих элементов - первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента, либо блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом; и
второй блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента первого дифференциального механизма либо с пятым вращающимся элементом, либо с шестым вращающимся элементом второго дифференциального механизма.
2. Система передачи мощности по п. 1, в которой
каждый из следующего - первый дифференциальный механизм и второй
дифференциальный механизм - представляет собой планетарный зубчатый механизм,
первый вращающийся элемент представляет собой солнечную шестерню,
второй вращающийся элемент представляет собой водило,
третий вращающийся элемент представляет собой кольцевую шестерню,
четвертый вращающийся элемент представляет собой водило,
пятый вращающийся элемент представляет собой солнечную шестерню,
шестой вращающийся элемент представляет собой кольцевую шестерню,
первый блок сцепления включает в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента со вторым вращающимся элементом, а также блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и
второй блок сцепления сконфигурирован с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с пятым вращающимся элементом.
3. Система передачи мощности по п. 1, в которой
каждый из следующего - первый дифференциальный механизм и второй дифференциальный механизм - представляет собой планетарный зубчатый механизм,
первый вращающийся элемент представляет собой солнечную шестерню,
второй вращающийся элемент представляет собой кольцевую шестерню,
третий вращающийся элемент представляет собой водило,
четвертый вращающийся элемент представляет собой водило,
пятый вращающийся элемент представляет собой солнечную шестерню,
шестой вращающийся элемент представляет собой кольцевую шестерню,
первый блок сцепления включает в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента с третьим вращающимся элементом, а также блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и
второй блок сцепления сконфигурирован с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с шестым вращающимся элементом.
4. Система передачи мощности по п. 1, в которой
каждый из следующего - первый дифференциальный механизм и второй дифференциальный механизм - представляет собой планетарный зубчатый механизм,
первый вращающийся элемент представляет собой солнечную шестерню,
второй вращающийся элемент представляет собой кольцевую шестерню,
третий вращающийся элемент представляет собой водило,
четвертый вращающийся элемент представляет собой кольцевую шестерню,
пятый вращающийся элемент представляет собой солнечную шестерню,
шестой вращающийся элемент представляет собой водило,
первый блок сцепления включает в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента с третьим вращающимся
элементом, а также блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и
второй блок сцепления сконфигурирован с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с шестым вращающимся элементом.
5. Система передачи мощности по п. 1, в которой
каждый из следующего - первый дифференциальный механизм и второй дифференциальный механизм - представляет собой планетарный зубчатый механизм,
первый вращающийся элемент представляет собой водило,
второй вращающийся элемент представляет собой солнечную шестерню,
третий вращающийся элемент представляет собой кольцевую шестерню,
четвертый вращающийся элемент представляет собой солнечную шестерню,
пятый вращающийся элемент представляет собой кольцевую шестерню,
шестой вращающийся элемент представляет собой водило,
первый блок сцепления включает в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента с третьим вращающимся элементом, а также блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и
второй блок сцепления сконфигурирован с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с пятым вращающимся элементом.
6. Система передачи мощности по п. 1, в которой
каждый из следующего - первый дифференциальный механизм и второй дифференциальный механизм - представляет собой планетарный зубчатый механизм,
первый вращающийся элемент представляет собой кольцевую шестерню,
второй вращающийся элемент представляет собой солнечную шестерню,
третий вращающийся элемент представляет собой водило,
четвертый вращающийся элемент представляет собой солнечную шестерню,
пятый вращающийся элемент представляет собой кольцевую шестерню,
шестой вращающийся элемент представляет собой водило,
первый блок сцепления включает в себя блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения первого вращающегося элемента с третьим вращающимся элементом, и блок сцепления, сконфигурированный с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с неподвижным элементом, и
второй блок сцепления сконфигурирован с возможностью формировать пару для разъемного соединения третьего вращающегося элемента с пятым вращающимся элементом.
7. Система передачи мощности по любому из пп. 1-6, в которой
коэффициент распределения мощности, с которым мощность двигателя распределяется между пятым вращающимся элементом и шестым вращающимся элементом в состоянии, когда первый блок сцепления находится в состоянии сцеплено, и второй блок сцепления не сцеплен, представляет собой первый коэффициент распределения мощности и коэффициент распределения мощности, при котором мощность двигателя распределяется между пятым вращающимся элементом и шестым
вращающимся элементом в состоянии, когда второй блок сцепления находится в состоянии сцеплено, и первый блок сцепления не сцеплен, представляет собой второй коэффициент распределения мощности, при этом первый коэффициент распределения мощности отличен от второго коэффициента распределения мощности.
8. Транспортное средство, характеризующееся тем, что содержит:
систему передачи мощности по п. 1;
первую вращающуюся электрическую машину, рабочий статус которой управляется для управления дифференциальным статусом второго дифференциального механизма, при этом крутящий момент, увеличенный по сравнению с крутящим моментом двигателя, механически передается на шестой вращающийся элемент, когда дифференциальный статус второго дифференциального механизма управляется в состоянии, в котором первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления не сцеплен;
двигатель, соединенный с первым вращающимся элементом так, что при этом передается мощность;
ведущее колесо, соединенное с шестым вращающимся элементом;
вторую вращающуюся электрическую машину, соединенную с ведущим колесом так, что при этом передается мощность; и
электронный блок управления, выполненный с возможностью при запуске двигателя переводить второй блок сцепления из расцепленного состояния в сцепленное состояние в состоянии, когда первый блок сцепления находится в состоянии сцеплено.
9. Транспортное средство по п. 8, в котором
электронный блок управления выполнен с возможностью при запуске двигателя выдавать крутящий момент из первой вращающейся электрической машины таким образом, что падение выходного крутящего момента на ведущем колесе уменьшается.
10. Транспортное средство по п. 9, в котором
электронный блок управления выполнен с возможностью при запуске двигателя выдавать крутящий момент, как из первой вращающейся электрической машины, так и из второй вращающейся электрической машины таким образом, что падение выходного крутящего момента на ведущем колесе уменьшается.
11. Транспортное средство по п. 9 или 10, в котором
электронный блок управления выполнен с возможностью установки крутящего момента, который выдается из первой вращающейся электрической машины, на заданную величину или меньшую.
12. Транспортное средство по п. 9 или 10, в котором
электронный блок управления выполнен с возможностью уменьшения крутящего момента, который выдается из первой вращающейся электрической машины, когда нагрузка при движении транспортного средства уменьшается.
13. Транспортное средство по п. 9 или 10, в котором
электронный блок управления выполнен с возможностью выдачи из первой вращающейся электрической машины крутящего момента, на величину которого крутящий момент второй вращающейся электрической машины недостаточен для крутящего момента для уменьшения падения выходного крутящего момента на ведущем колесе.
14. Транспортное средство по п. 9 или 10, в котором
электронный блок управления выполнен с возможностью при запуске двигателя выдавать крутящий момент из первой вращающейся электрической машины при управлении с обратной связью таким образом, что обороты двигателя изменяются вблизи целевого значения.
15. Транспортное средство по п. 8 или 9, в котором
электронный блок управления выполнен с возможностью, когда управляемость во время управления вторым блоком сцепления выше заданного критерия, выполнения управления запуском двигателя для
переведения второго блока сцепления из расцепленного состояния в сцепленное состояние в состоянии, когда первый блок сцепления находится в состоянии сцеплено, и
электронный блок управления выполнен с возможностью, когда управляемость во время управления вторым блоком сцепления ниже заданного критерия, выполнения управления запуском двигателя для увеличения оборотов двигателя с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен.
16. Транспортное средство по п. 15, в котором
электронный блок управления выполнен с возможностью сужения области привода с помощью электрического двигателя в случае, когда управляемость во время управления вторым блоком сцепления ниже заданного критерия по сравнению с областью привода с помощью электрического двигателя в случае, когда управляемость во время управления вторым блоком сцепления выше заданного критерия, а режим привода с помощью электрического двигателя представляет собой режим привода, в котором транспортное средство движется путем использования второй вращающейся электрической машины в качестве источника движущей силы в состоянии, когда работа двигателя остановлена.
17. Транспортное средство по п. 15, в котором
электронный блок управления выполнен с возможностью, когда, по меньшей мере, одно из следующего: либо температура рабочего масла для управления вторым блоком сцепления выше заданной температуры масла, либо температура рабочего масла ниже второй заданной температуры масла, которая выше заданной температуры масла, определения, что управляемость во время управления вторым блоком сцепления выше заданного критерия.
18. Транспортное средство по п. 8 или 9, в котором
второй дифференциальный механизм включает в себя одноступенчатый
планетарный зубчатый механизм, в котором один из элементов - либо солнечная шестерня, либо кольцевая шестерня - представляет собой четвертый вращающийся элемент, а другой из этих элементов - либо солнечная шестерня, либо кольцевая шестерня - представляет собой пятый вращающийся элемент, и водило является шестым вращающимся элементом.
19. Транспортное средство, характеризующееся тем, что содержит:
систему передачи мощности по п. 1;
первую вращающуюся электрическую машину, рабочий статус которой управляется для управления дифференциальным статусом второго дифференциального механизма;
двигатель, соединенный с первым вращающимся элементом так, что при этом передается мощность;
ведущее колесо, соединенное с шестым вращающимся элементом;
вторую вращающуюся электрическую машину, соединенную с ведущим колесом так, что при этом передается мощность; и
электронный блок управления, выполненный с возможностью при запуске двигателя переводить второй блок сцепления из расцепленного состояния в сцепленное состояние в состоянии, в котором первый блок сцепления находится в состоянии сцеплено, и
при запуске двигателя выдавать крутящий момент из первой вращающейся электрической машины так, что при этом падение выходного крутящего момента на ведущем колесе уменьшается.
20. Транспортное средство по п. 19, в котором
электронный блок управления выполнен с возможностью при запуске двигателя выдавать крутящий момент, как из первой вращающейся электрической машины, так и из второй вращающейся электрической машины, при этом падение выходного крутящего момента на ведущем колесе уменьшается.
21. Транспортное средство по п. 19 или 20, в котором
электронный блок управления выполнен с возможностью установки крутящего момента, который выдается из первой вращающейся электрической машины, на заданную величину или меньшую.
22. Транспортное средство по п. 19 или 20, в котором
электронный блок управления выполнен с возможностью уменьшения крутящего момента, который выдается из первой вращающейся электрической машины, когда нагрузка при движении транспортного средства уменьшается.
23. Транспортное средство по п. 19 или 20, в котором
электронный блок управления выполнен с возможностью выдачи из первой вращающейся электрической машины крутящего момента, на величину которого крутящий момент второй вращающейся электрической машины недостаточен для крутящего момента для уменьшения падения выходного крутящего момента на ведущем колесе.
24. Транспортное средство по п. 19 или 20, в котором
электронный блок управления выполнен с возможностью, при запуске двигателя, выдачи крутящего момента из первой вращающейся электрической машины при управлении с обратной связью так, что при этом обороты двигателя изменяются вблизи целевого значения.
25. Транспортное средство по п. 19 или 20, в котором
электронный блок управления выполнен с возможностью выполнения управления запуском двигателя для приведения второго блока зацепления из расцепленного состояния в сцепленное состояние в состоянии, когда первый блок сцепления находится в состоянии сцеплено, когда управляемость во время управления вторым блоком сцепления выше заданного критерия, а также выполнения управления запуском двигателя для увеличения оборотов двигателя с использованием первой вращающейся электрической машины в состоянии, когда первый блок сцепления находится в состоянии сцеплено, а второй блок сцепления расцеплен, когда управляемость во время управления вторым блоком сцепления ниже заданного критерия.
26. Транспортное средство по п. 25, в котором
электронный блок управления выполнен с возможностью сужения области привода с помощью электрического двигателя в случае, когда управляемость во время управления вторым блоком сцепления ниже заданного критерия по сравнению с областью привода с помощью электрического двигателя в случае, когда управляемость во время управления вторым блоком сцепления выше заданного критерия, и режим привода с помощью электрического двигателя представляет собой режим привода, в котором транспортное средство движется путем использования второй вращающейся электрической машины в качестве источника движущей силы в состоянии, когда работа двигателя остановлена.
27. Транспортное средство по п. 25, в котором
электронный блок управления выполнен с возможностью, когда, по меньшей мере, одно из следующего: либо температура рабочего масла для управления вторым блоком сцепления выше заданной температуры масла, либо температура рабочего масла ниже второй заданной температуры масла, которая выше заданной температуры масла, определения того, что управляемость во время управления вторым блоком сцепления выше заданного критерия.
28. Транспортное средство по п. 19 или 20, в котором
второй дифференциальный механизм включает в себя одноступенчатый планетарный зубчатый механизм, в котором один из элементов - либо солнечная шестерня, либо кольцевая шестерня - представляет собой четвертый вращающийся элемент, а другой из них - либо солнечная шестерня, либо кольцевая шестерня - представляет собой пятый вращающийся элемент, и водило является шестым вращающимся элементом.
| Применение настоя многокомпонентного сбора лекарственных растений для полосканий рта с целью профилактики развития и лечения мукозита | 2023 |
|
RU2810839C1 |
| WO 2006009049 A1, 26.01.2006 | |||
| WO 2007140123 A2, 06.12.2007 | |||
| US 7479081 B2, 20.01.2009 | |||
| US 2010018788 A1, 28.01.2010 | |||
| US 2010029429 A1, 04.02.2010 | |||
| Электромеханическая трансмиссия транспортного средства | 1972 |
|
SU728699A3 |

