Область техники, к которой относится изобретение.
Изобретение относится к автоматизированным системам мониторинга состояния окружающей среды и может быть использовано для прогнозирования и контроля развития техногенной аварийной ситуации, ее экологических последствий, ситуационной осведомленности при планировании аварийно-спасательных работ.
Технический уровень.
При возникновении чрезвычайной ситуации с выбросом техногенных примесей в окружающую среду при планировании аварийно-спасательных работ первоочередной задачей является формирование прогноза экологических последствий и оценка воздействия вредных и опасных факторов в районе аварии на человека и окружающую среду. Эффективность решения этой задачи зависит от эффективности мониторинга состояния окружающей среды района техногенной аварии и источника загрязнения.
Под районом техногенной аварии понимают часть местности, подвергшейся и часть местности, которая потенциально может быть подвержена воздействию вредных и опасных факторов аварийного техногенного источника. Под многопараметрическим мониторингом района техногенной аварии понимают измерения и систематизацию параметров окружающей среды различной физической природы, характеризующие условия проведения аварийно-спасательных работ: погодные (метеорологические, гидрологические, морфологические и т.п.), экологические (радиационные, токсические, химические), ситуационные. Под ситуационной осведомленностью в районе техногенной аварии понимают сбор и систематизацию данных, связанных с условиями проведения аварийно-спасательных работ. Под повышением эффективности мониторинга района техногенной аварии понимают повышение достоверности, полноты и оперативности измерений параметров окружающей среды, т.е. увеличение их количества и качества в режиме реального времени.
По периметру территории радиационно-опасных объектов Российской Федерации функционирует автоматизированная система контроля радиационной обстановки (АСКРО), включающая датчики радиационного контроля и контроля физических параметров атмосферы: температуры воздуха, атмосферного давления, направления и скорости ветра, влажности. АСКРО позволяет своевременно выявить поступление радиоактивных веществ в атмосферу и оперативно сформировать прогноз радиоактивного загрязнения местности в районе аварийного радиационно-опасного объекта.
В аварийных ситуациях с мобильными потенциально-опасными объектами, такими как железнодорожные, автомобильные или морские транспорты с радиационно- или химически опасными грузами, транспорты с бортовыми ядерными энергетическими установками и т.п., достоверная информация о состоянии окружающей среды в месте аварии не всегда доступна в силу удаленности метеорологических или гидрологических постов и средств контроля за техногенными выбросами. В рассматриваемых ситуациях применяют мобильные системы экологического мониторинга на базе автомобильных шасси, летательных аппаратов, морских судов, амфибий. Например, известно морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны (Патент РФ 2610156, 08.02.2017, В63В 35/00), которое выполнено в виде летательного аппарата с реализацией режимов полета у экрана, вне экрана и в водоизмещающем режиме (экраноплан). В состав входит измерительная аппаратура для контроля параметров атмосферы и водной среды, экологической обстановки, аппаратура для видео- и радиолокационной съемки, телеуправляемый подводный аппарат, навигационный комплекс, аварийно-спасательные средства, водолазное оборудование.
Для долговременного контроля экологической обстановки устанавливают переносные датчики. Так, известен способ определения и прогнозирования объема загрязненного грунта с использованием сети автономных датчиков контроля физических характеристик грунта и приземного слоя атмосферы, которые устанавливают в районе, подвергшемся загрязнению техногенной примесью, в процессе проведения радиационного обследования территории (Патент РФ 2778214, 15.08.2022, G01T 1/169). Датчики позволяют осуществлять долговременный автоматизированный дистанционный контроль экологической обстановки путем передачи телеметрических данных по беспроводному каналу связи.
Одним из путей получения требуемого объема данных о состоянии окружающей среды в любой точке пространства является использование мобильных робототехнических комплексов. Роботы классифицируют по средам их функционирования: воздушные, наземные, надводные, подводные, т.е. каждый робот способен действовать лишь в своей узкой сфере ответственности. Повышению эффективности робототехнических комплексов способствует создание гибридных мобильных робототехнических комплексов (ГМРК), объединяющих роботы, действующие в различных средах - воздух, суша, вода, соответственно: беспилотные летательные аппараты (БЛА), мобильные роботы (MP) и необитаемые подводные аппараты (НПА) и надводные [1]. На сегодняшний день все виды указанных роботов активно разрабатываются, серийно выпускаются в РФ и включаются в техническое обеспечение специальных аварийных формирований различных ведомств и служб, включая, МЧС и Минобороны России [2, 3]. Для обеспечения согласованной работы ГМРК используют алгоритмы и технологии, позволяющие роботам накапливать информацию, распознавать ее, производить оценку ситуации, осуществлять обмен данными о параметрах окружающей среды и взаимодействие в группе. Для робототехнических средств разрабатывают специализированные целевые нагрузки для выполнения задач мониторинга. Известны целевые нагрузки для MP и БЛА радиационного обследования территории, поиска радиационно-опасных объектов, отбора проб воздуха, грунта и растительности; на БЛА используют устройства измерения метеорологических параметров; на НПА устанавливают погружные гамма-спектрометры, магнитометры, гидролокаторы и пр. оборудование [1-6]. Известно устройство с падающими метеозондами, которое устанавливают на БЛА [6].
Известны способы применения БЛА для измерения параметров ветра в пограничном и свободном слоях атмосферы по его летным и навигационным данным, для восстановления скорости ветра используют записи полетного контроллера [4, 5]. Результаты метеорологического зондирования на базе квадрокоптеров показали, что они объективно отражают реальные условия и совпадают с данными высотной метеорологической мачты в Обнинске и высокоточных измерений акустических анемометров [4]. Известен способ применения НПА для измерения параметров течений по его ходовым и навигационным данным (Патент РФ 2622460, 15.06.2017, G01P 5/00).
Аналоги.
К аналогам патентуемой системы многопараметрического мониторинга района техногенной аварии можно отнести следующие системы и комплексы мониторинга состояния окружающей среды с использованием робототехнических средств.
Известен комплекс радиационного мониторинга на территории атомной электростанции (АЭС) на базе БЛА, который используют в дополнение к стационарным системам [7]. Комплекс позволяет проводить мониторинг радиационной обстановки всей территории АЭС в автономном режиме.
Известен мониторинговый комплекс атмосферного воздуха, который основан на использовании современных систем измерения, установленных на БЛА, что позволяет решать актуальные задачи по быстро разворачиваемым системам экологического мониторинга за состоянием окружающей среды [8]. Он включает малогабаритный БЛА вертолетного типа (мБЛА-ВТ) и малогабаритный БЛА самолетного типа (мБЛА-С). Комплекс применяется для решения следующих задач: проведение дистанционного воздушного мониторинга, видеосъемки и аэрофотосъемки местности и объектов с высоты от 50 м до 1000 м; выполнение тепловизионного мониторинга; проведение измерений радиационного загрязнения атмосферы; обнаружение утечек метана; количественное определение концентрации кислорода, оксида углерода, диоксида углерода, оксида азота, диоксида азота, диоксида серы, сероводорода, а также измерение температуры и давления (разрежения) в зоне отбора пробы; количественное определение запыленности атмосферы в заданной точке. Основными преимуществами рассматриваемого комплекса являются возможность ведения наблюдений в труднодоступных местах и получение трехмерного изображения загрязнения атмосферного воздуха. Мониторинг с использованием БЛА проводится в четыре этапа: рекогносцировка территории; выбор объекта исследования; численное моделирование экспериментальных данных; оценка и прогноз экологической ситуации района обследования.
Известен морской роботизированный комплекс «Глайдерон», основанный на согласованной работе БЛА и автономного НПА [9]. Предлагаемое решение представляет собой объединение в единую модульную конструкцию роботов различного типа и различной функциональности и получения на этой основе синергетического эффекта совместного использования морских и воздушных объектов управления в задачах мониторинга акватории для решения задачи ситуационной осведомленности. На глайдере устанавливают разнообразную сменную полезную нагрузку. БЛА с разнообразными элементами технического зрения и анализа окружающей среды позволяет получать требуемые по постановке задачи мониторинга данные ситуационной осведомленности в воздушной среде, в ближнем надводном слое, на поверхности акватории, а также в окрестности прибрежной зоны.
Известна автоматизированная система аварийного и экологического мониторинга окружающей среды региона (Патент РФ 2324957, 20.09.2008), содержащая стационарные и мобильные посты, центральный контрольный пункт. Каждый стационарный и мобильный пост включает блок предварительной обработки информации, блок шифрования, блок помехоустойчивого кодирования, приемопередатчик, блок управления, канал прямой и обратной связи. Каждый мобильный пост содержит задающий генератор, фазовый манипулятор, первый и второй смесители, усилитель первый и второй промежуточной частоты, первый и второй усилители мощности, дуплексер, первый и второй гетеродины, блок помехоустойчивого кодирования, полосовой фильтр, перемножитель, усилитель второй промежуточной частоты, первый, второй и третий фазовые детекторы, первый и второй блоки вычитания, фазовозвращатели.
Известна система экологического мониторинга атмосферного воздуха горнопромышленной промагломерации (Патент РФ 25367889, 27.12.2014). Система содержит первую и вторую группы быстродействующих датчиков экологического контроля состояния атмосферы, систему GPS, метеостанцию, мобильную телефонную станцию, центральный диспетчерский пункт. Причем датчики первой группы для измерения фоновых концентраций химического загрязнения и уровней физического загрязнения атмосферного воздуха устанавливают на стационарных постах. Датчики второй группы для измерения концентраций химического загрязнения и уровней физического загрязнения атмосферного воздуха устанавливают на БЛА. В случае обнаружения превышения нормативных значений загрязнений датчиками первой группы в места превышения уровня загрязнения направляют БЛА с датчиками второй группы, совершающий облеты по адаптивной программе, обеспечивающие эффективное прогнозирование возникновения и развития аварийной ситуации.
Недостатком известных технических систем является недостаточная эффективность получения объективной информации, обусловленная ограниченностью области их применения, отсутствием технической возможности проведения оперативной расчетно-аналитической обработки измеренных параметров и оперативного прогнозирования загрязнения окружающей среды.
Прототип.
К наиболее близким аналогам можно отнести систему экологического мониторинга и прогнозирования загрязнения атмосферы промышленного региона (Патент РФ 2446434, 10.11.2012), содержащую первую и вторую группы датчиков экологического контроля состояния среды, электротранспортные средства, средства радиосвязи датчиков второй группы с аппаратурой городской телефонной сети, центральный диспетчерский пункт, быстродействующие газовые датчики экологического контроля атмосферы, систему GPS, мобильную телефонную систему, метеостанцию, группу датчиков замеров концентраций непосредственно с источников загрязнения, первый центр моделирования, центр обработки и сравнения данных, второй центр моделирования, блок моделирования метеопараметров, центр прогноза загрязнения, датчики времени и концентрации загрязняющих веществ от источника загрязнения; датчики замеров концентраций непосредственно с источников загрязнения и метеостанция соединены с первым центром моделирования, выход которого соединен с первым входом обработки и сравнения данных, быстродействующие газовые датчики экологического контроля атмосферы и система GPS по средствам мобильной телефонной системы соединены со вторым входом центра обработки и сравнения данных, первые группы датчиков экологического контроля соединены с третьим входом центра обработки и сравнения данных, вторые группы датчиков по средствам радиосвязи соединены с аппаратурой городской телефонной сети, выход которой соединен с четвертым входом центра обработки и сравнения данных, выход которого соединен с первым входом центрального диспетчерского пункта и первым входом центра прогноза загрязнения, выход центрального диспетчерского пункта соединен с задатчиком времени, первый выход которого соединен с входом блока моделирования метеопараметров, а второй выход соединен с входом временно-параметрических задатчиков концентраций загрязняющих веществ от источников загрязнения, выходы которых соединены с первым входом моделирования, выход блока метеопараметров соединен со вторым входом второго центра моделирования, выход которого соединен со вторым входом центрального диспетчерского пункта и со вторым входом центра прогноза загрязнений, выход которого соединен с третьим входом центрального диспетчерского пункта.
Система предназначена для размещения в промышленном регионе, содержит сеть стационарных датчиков, использует городскую телефонную сеть, что не позволяет использовать систему для экологического мониторинга в случае аварии мобильного потенциально-опасного объекта, не обеспечивает получение полного объема данных необходимых для оценки условий проведения аварийно-спасательных работ.
Цель изобретения - повышение эффективности мониторинга района техногенной аварии.
Технический результат предлагаемой системы заключается в увеличении количества и качества многопараметрических измерений в режиме реального времени одновременно в воздухе, воде и на грунте в районе техногенной аварии, независимо от его географического местоположения; расширение функциональных возможностей гибридных робототехнических комплексов аварийно-спасательных формирований.
Способ достижения технического результата.
Указанный технический результат достигается тем, что система содержит группы датчиков первая воздушного, вторая наземного и третья подводного многопараметрического мониторинга, каждая группа содержит подгруппы датчиков: первая - метеорологического, вторая - экологического мониторинга и третья - ситуационной осведомленности, датчики размещают на беспилотных электротранспортных средствах мобильных постов беспилотных комплексов многопараметрического мониторинга соответственно воздушного, наземного и подводного, электротранспортные средства с подгруппой датчиков запускают в интересующие области района техногенной аварии. Программно-аппаратным комплексом мобильного центрального пункта управления и моделирования системы планируют согласованную работу беспилотных комплексов многопараметрического мониторинга и по каналам связи передают управляющие команды на пункты управления беспилотных комплексов многопараметрического мониторинга и принимают от последних данные первой, второй и третьей групп датчиков мобильных постов, систематизируют поступающие данные, обрабатывают по заданным алгоритмам и передают данные о фактических и прогнозируемых условиях погодных, экологических и ситуационных в районе техногенной аварии органу управления аварийно-спасательными работами.
Предлагаемая система от известных систем мониторинга отличается тем, что в систему в качестве электротранспортных средств дополнительно введены MP и НПА соответственно в наземный и подводный беспилотные комплексы многопараметрического мониторинга и средство транспортирования беспилотных комплексов многопараметрического мониторинга и центрального пункта управления и моделирования к месту аварии; что вторую группу датчиков размещают на MP, в систему дополнительно введена третья группа датчиков контроля параметров гидросферы, которую размещают на НПА, в группы датчиков введены первая подгруппа датчиков метеорологического мониторинга, вторая подгруппа датчиков экологического мониторинга и третья подгруппа датчиков ситуационной осведомленности, выполненные в виде сменных целевых нагрузок для робототехнических мобильных средств и подгруппа автономных автоматических датчиков долговременного дистанционного контроля параметров среды, доставляемых и устанавливаемых в интересующие области района техногенной аварии робототехническим средством; что беспилотные комплексы многопараметрического мониторинга функционируют одновременно и согласованно по адаптивным программам центрального пункта управления и моделирования, содержащего программно-аппаратные модули, обеспечивающие решение расчетных и аналитических задач моделирования и оценки фактических и прогнозируемых условий погодных, экологических и ситуационных в районе техногенной аварии по данным многопараметрического мониторинга и данным внешних источников информации, динамичного управления беспилотными комплексами многопараметрического мониторинга с заданными требованиями эффективности. Сущность изобретения.
Сущность изобретения поясняется на фигурах.
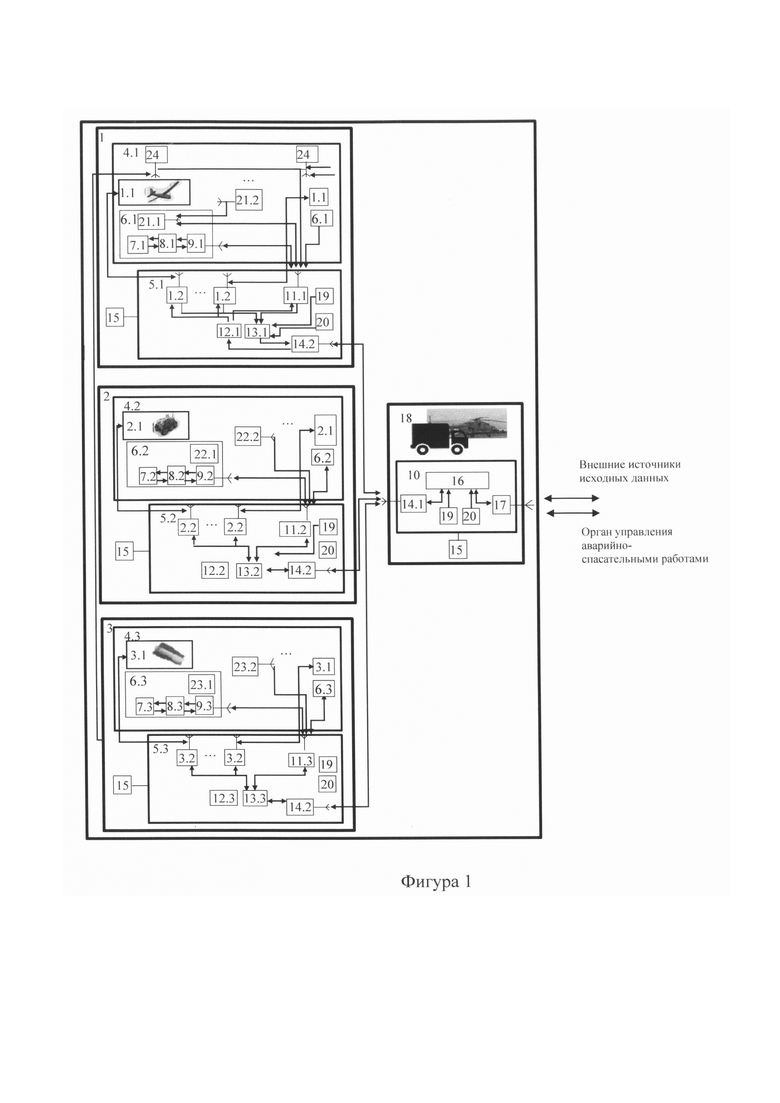
На фигуре 1 изображена структурная схема системы многопараметрического мониторинга района техногенной аварии.
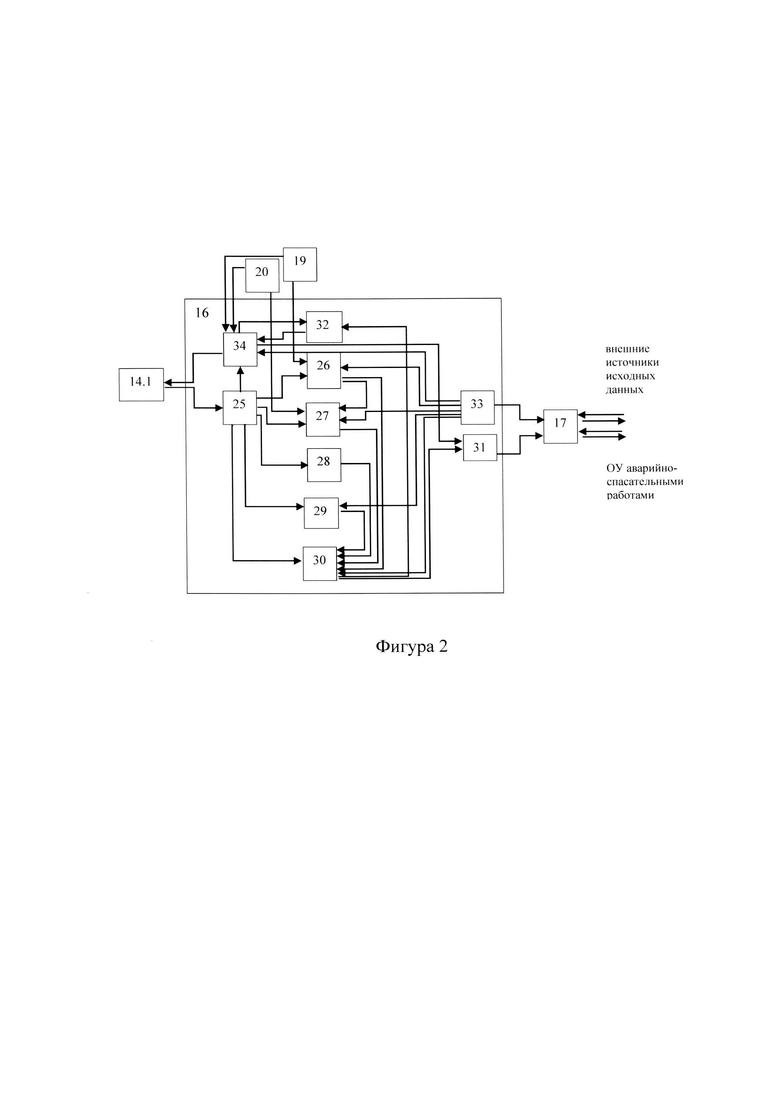
На фигуре 2 изображена схема программно-аппаратного комплекса центрального пункта управления и моделирования системы многопараметрического мониторинга района техногенной аварии.
Согласно чертежу фиг. 1 и фиг. 2 предлагаемая система многопараметрического мониторинга района техногенной аварии содержит следующие структурные элементы: беспилотные воздушный (БВК) 1, наземный (БНК) 2 и подводный (БПК) 3 комплексы многопараметрического мониторинга, мобильный центральный пункт управления и моделирования 10 и средство их доставки в район техногенной аварии 18; беспилотные комплексы многопараметрического мониторинга содержат мобильный пост 4 и пункт управления беспилотным комплексом многопараметрического мониторинга 5; мобильный пост содержит не менее чем одно мобильное робототехническое средство и не менее чем одну группу датчиков многопараметрического мониторинга 6, которая содержит первую, вторую и третью подгруппы датчиков 7 мониторинга среды функционирования беспилотного комплекса и не менее чем одну подгруппу автономных автоматизированных датчиков, дистанционно устанавливаемых мобильным робототехническим средством, входы и выходы датчиков подгруппы 7 соединены с выходами и входами блока опроса, сбора данных и формирования кодированного сообщения 8, вторые выход и вход которого соединены с входом и выходом приемопередающего устройства 9, обеспечивающего связь с наземным блоком управления и сбора данных 11 от подгруппы датчиков мобильного поста 4 пункта управления беспилотным комплексом 5.
Блок 8 содержит съемное энергонезависимое запоминающее устройство, совместимое с устройством считывания блока систематизации данных мониторинга 25 центрального пункта управления и моделирования 10.
Пункты управления БВК, БНК и БПК многопараметрического мониторинга 5 содержат не менее чем один пульт дистанционного управления робототехническим электротранспортным средством, соответственно БЛА 1.2, MP 2.2, НПА 3.2 мобильного поста 4; пульт дистанционного управления и сбора данных датчиков многопараметрического мониторинга 11 соответствующего мобильного поста 4, вход пультов управления 1.2, 2.2, 3.2 и 11 соединен с выходом блока приема и передачи управляющих команд 12 от мобильного центрального пункта управления системой и моделирования 10, вход блока 12 соединен с выходом приемопередающего устройства 14.2; выход пультов управления 1.2, 2.2, 3.2 и 11 соединен с входом блока систематизации и формирования кодированных сообщений 13 с данными подгрупп датчиков мобильного поста 4, выход блока 13 соединен с входом приемопередающего устройства 14.2, которое осуществляет прием/передачу данных от/на приемопередающего устройства 14.1 мобильного центрального пункта управления системой и моделирования 10.
Выход стационарного метеорологического поста 19 и выход стационарного экологического поста 20 пунктов управления беспилотными комплексами соединены с входами блока 13.
Мобильный пост 4 БВК содержит не менее чем один беспилотный летательный аппарат (БЛА) 1.1 и не менее чем одну первую группу датчиков 6.1 и средство ретрансляции сигналов 24 от наземного и подводного беспилотных комплексов мониторинга, работающих к группе; первая группа датчиков 6.1 содержит первую подгруппу датчиков метеорологических параметров атмосферы, вторую подгруппу датчиков контроля загрязнения техногенной примесью в атмосфере и на поверхности земли и третью подгруппу датчиков ситуационной осведомленности, в качестве подгруппы дистанционно устанавливаемых автономных автоматизированных датчиков содержит комплект падающих метеорологических датчиков 21.2, который содержит блок транспортирования, сброса, приема и ретрансляции данных от сбрасываемых датчиков 21.1 на пульт управления и сбора данных подгрупп датчиков мобильного поста 11.1.
Мобильный пост 4 БНК 2 многопараметрического мониторинга содержит не менее чем один мобильный робот (MP) 2.1, не менее чем одну вторую группу датчиков 6.2 многопараметрического мониторинга приземного слоя атмосферы и литосферы; вторая группа датчиков 6.2 содержит первую группу датчиков метеопараметров приземного слоя атмосферы и грунта, вторую подгруппу датчиков концентраций техногенной примеси в приземном слое и на поверхности земли, третью подгруппу датчиков ситуационной осведомленности в месте функционирования MP, в качестве подгруппы дистанционно устанавливаемых автономных автоматизированных датчиков содержит комплект дистанционно устанавливаемых датчиков автономного контроля параметров грунта 22.2 и устройство для их доставки и установки манипулятором MP 22.1.
Мобильный пост 4 БПК 3 содержит не менее чем один необитаемый подводный аппарат (НПА) 3.1 и не менее чем одну третью группу датчиков 6.3 многопараметрического мониторинга гидросферы, третья группа датчиков 6.3 содержит первую подгруппу датчиков физико-химических свойств воды, вторую подгруппу датчиков концентраций загрязнения техногенной примесью вод, бионта и донных отложений (грунта), третью подгруппу датчиков ситуационной осведомленности в акватории в районе аварии; в качестве подгруппы дистанционно устанавливаемых автономных автоматизированных датчиков содержит комплект дистанционно устанавливаемых и снимаемых сорбционных проточных устройств отбора проб воды 25.
Центральный пункт управления и моделирования 10 содержит программно-аппаратный комплекс 16 управления системой, систематизации данных поступающих по каналам связи и моделирования процессов в окружающей среде, блоки информационного обмена с органом управления аварийно-спасательными работами 17 и пунктами управления беспилотными комплексами 14.1 стационарные посты метеорологического 19 и экологического 20 контроля. Программно-аппаратный комплекс содержит электронно-вычислительные машины с программным обеспечением, согласно чертежу фиг. 2, блок систематизации данных многопараметрического мониторинга и передачи в блоки моделирования 25, вход которого соединен с выходом блока информационного обмена с пунктами управления беспилотными комплексами 14.1, первый выход соединен с первым входом блока моделирования динамических параметров среды 26, второй выход соединен с первым входом блока моделирования экологической обстановки 27, третий выход соединен с входом блока формирования изолиний концентраций фактического загрязнения 28, четвертый выход соединен с первым входом блока моделирования физического воздействия аварийного источника на окружающую среду 29, пятый выход соединен с первым входом блока моделирования ситуационной осведомленности о факторах окружающей среды 30, шестой выход соединен с третьим входом блока управления беспилотными комплексами 34; блок систематизации данных внешних источников 33, вход которого соединен с выходом блока информационного обмена с внешними источниками 17, первый выход которого соединен с первым входом блока управления беспилотными комплексами мониторинга 34, второй выход соединен со вторым входом блока моделирования динамических параметров среды 26, третий выход соединен со вторым входом блока моделирования экологической обстановки 27, четвертый выход соединен со вторым входом блока моделирования физического воздействия аварийного источника на окружающую среду 29, пятый выход соединен с блоком ситуационной осведомленности 30; блок передачи результатов многопараметрического мониторинга ОУ и запросов к внешним источникам информации 31, первый вход соединен с третьим выходом блока управления беспилотными комплексами 34, второй вход которого соединен с первым выходом блока моделирования ситуационной осведомленности о факторах окружающей среды 30, выход соединен с входом блока информационного обмена 17; второй выход блока моделирования ситуационной осведомленности о факторах окружающей среды 30 соединен со вторым входом блока планирования многопараметрического мониторинга 32, первый вход которого соединен со вторым выходом блока управления беспилотными комплексами 34, а выход соединен со вторым входом блока управления 34, первый выход которого соединен с входом блока информационного обмена 14.1, блок моделирования ситуационной осведомленности о факторах окружающей среды 30 вторым входом соединен с выходом блока моделирования физического воздействия аварийного источника на окружающую среду 29, третьим входом соединен с выходом блока формирования изолиний концентраций фактического загрязнения 28, четвертым входом соединен с выходом блока моделирования экологической обстановки 27, пятым входом соединен с первым выходом блока моделирования динамических параметров среды 26, второй выход которого соединен с третьим входом блока моделирования экологической обстановки 27; выход стационарного метеорологического поста 19 соединен с третьим входом блока моделирования динамических параметров среды 26, выход стационарного экологического поста 20 соединен с четвертым входом блока моделирования экологической обстановки 27; вход и выход блока 14.1 по беспроводному каналу связи соединены с выходом и входом блока 14.2 пунктов управления беспилотными комплексами мониторинга, выход и вход которого соединены с первым входом и выходом блока первичной обработки данных мониторинга 13, второй вход которого соединен с пунктом сбора данных целевых нагрузок 12, на третий вход которого передают данные состояния технических систем по проводному каналу связи или посредством запоминающего устройства, четвертый вход соединен с выходом стационарного метеорологического поста, пятый вход соединен с выходом стационарного экологического поста. Форматы сообщений соответствуют установленным стандартам протоколов обмена в системе.
Пункты управления беспилотными комплексами многопараметрического мониторинга и центральный пункт управления и моделирования содержат техническое средство автономного электропитания 15 типа дизельный электрогенератор, к которому подключают электропотребителей пунктов управления.
Центральный пункт управления 5 размещают в средстве транспортирования 18 системы автоматизированной мобильной многопараметрического мониторинга в район аварии.
Состав подгрупп датчиков многопараметрического мониторинга зависит от назначения и задач аварийно-спасательного формирования.
БВК 1 в зависимости от используемой подгруппы датчиков 6.1 мониторинга выполняет задачи: мониторинга высотных метеорологических параметров подгруппой датчиков измерения метеорологических параметров; экологического контроля состояния окружающей среды подгруппой датчиков контроля концентраций техногенных загрязнений в атмосфере; ситуационной осведомленности подгруппой датчиков разведки места и района аварии, включая средства картографирования местности, мониторинга состояния водной поверхности, выявления очагов возгорания и температуры авариных объектов. Мониторинг метеорологических параметров осуществляют подгруппой метеорологических датчиков, параметры ветра восстанавливают по данным полетного контроллера БЛА 1.1. программным обеспечением блока моделирования динамических параметров среды 26 центрального пункта управления, например, по алгоритму [5]. В подгруппу метеорологических датчиков первой группы в зависимости от решаемых задач включают датчики температуры и влажности воздуха, ИК-датчик температуры подстилающей поверхности, приемник воздушных давлений, датчик атмосферного давления, выполненные в виде целевой нагрузки типа [4].
Для разработки параметризации атмосферы в численных моделях переноса примесей над территорией с четко выраженной неоднородностью необходимы данные о вертикальных профилях параметров атмосферы над границами термических и динамических свойств подстилающей поверхности (суша-вода, лед-вода, лес-поле). Оперативные и детальные данные получают от сбрасываемых метеодатчиков 21.2, содержащих беспроводной канал связи с бортовым блоком управления датчиками 21.2 и GPS приемник, типа целевой нагрузки разведки метеорологических условий, разработанной ООО «Специальный Технологический Центр».
В подгруппа первой группы датчиков ситуационной осведомленности в зависимости от решаемых задач включают оптоэлектронные датчики в видимом и инфракрасном диапазонах контроля обстановки в районе аварии (завалы, дороги, очаги возгорания и пр.), дистанционного обследования состояния грунта (наличия полостей, промерзлостей, грунтовых вод,) и поверхности воды (наличия пленок поверхностно-активных веществ, волнения, ледового покрытия), основанные на различных физических принципах.
БНК в зависимости от состава подгрупп датчиков мониторинга выполняет задачи: мониторинга приземных метеорологических параметров; контроля физических и химических свойств грунта, экологического контроля состояния грунта и растительности; ситуационной осведомленности в зоне аварии.
В подгруппу датчиков контроля параметров окружающей среды второй группы датчиков 6.2 включают датчики температуры и влажности почвы на опускаемой штанге, температуры и влажности воздуха, анемометр на выдвижной штанге, датчик атмосферного давления, средства транспортирования и отбора проб грунта и растительности манипулятором MP.
Для долговременного контроля экологической и метеорологической обстановки в районе аварии БНК содержит комплект датчиков, устанавливаемых для долговременного контроля параметров окружающей среды в заданных точках района 22. Например, датчики, описанные в Патенте РФ №2778214. Датчики размещают в контейнере на корпусе MP, конструкция контейнера должна предусматривать установку датчиков манипулятором MP. Стационарные датчики с заданной периодичностью передают данные измерений на пульт управления и сбора данных мониторинга 11.2 БНК по беспроводному каналу связи.
В подгруппу третьей группы датчиков ситуационной осведомленности в месте аварии включают оптоэлектронные средства высокого разрешения в видимом и инфракрасном диапазонах и средство контроля температуры поверхностей (пирометр).
Во вторую подгруппу первой и второй групп датчиков контроля загрязнения техногенной примесью в атмосфере и на поверхности земли включают датчики измерения концентраций (активности) загрязняющих веществ, тип датчиков и способ регистрации наличия загрязнения зависит от вида аварийного источника (радиационный, химический);
БПК в зависимости от используемой подгруппы датчиков мониторинга может выполнять задачи: мониторинга гидрофизических параметров водной; экологического контроля состояния водной среды; ситуационной осведомленности в подводной обстановке, профилирования дна и придонных объектов, исследования донных отложений.
Первая подгруппа третьей группы датчиков 6.3 контроля гидрофизических параметров водной среды содержит датчики температуры, давления воды, электропроводности воды, оптических свойств воды.
Состав датчиков второй подгруппы третьей группы для контроля уровней загрязнения воды и донных отложений техногенной примесью зависит от вида аварийного источника (радиационный, токсический, нефтепродукты и пр.).
Третья подгруппа третьей группы датчиков ситуационной осведомленности в аварийном районе акватории включают средства обследования состояния дна и придонных объектов гидроакустические, магнитометрические оптоэлектронные средства подводного наблюдения с дополнительной системой освещения.
В качестве датчиков долговременного контроля экологической обстановки в акватории БПК может содержать проточные сорбционные устройства, доставляемые и устанавливаемые в подводном положении телеуправляемыми НПА с манипулятором.
Блок 8 выполнен на платформе одноплатного компьютера.
Устройства передачи данных системы блоков 11, 13, 31 содержат расчетно-аналитический блок, устройство шифрования, устройство помехоустойчивого кодирования.
Передачу данных от группы датчиков мобильных постов беспилотных комплексов на их пункты управления осуществляют в запросном режиме или с заданным временным периодом. Передача данных от группы датчиков многопараметрического мониторинга БПК зависит от типа используемых НПА. Связь с телеуправляемыми НПА осуществляют по проводному каналу на пункт управления БПК с последующей передачей данных на центральный пункт по беспроводному каналу. Для связи с автономными НПА в подводном режиме используют гидроакустический канал связи или радиоканал для передачи данных при всплытии НПА на поверхность воды с ретрансляцией сигнала посредством целевой нагрузки 24 БЛА из состава БВК.
Расчетно-аналитические блоки мобильного центрального пункт управления и моделирования представляют собой программно-аппаратные комплексы со программным обеспечением, объединенные в локальную сеть.
Предлагаемая система работает следующим образом.
Беспилотные комплексы многопараметрического мониторинга и центральный пункт управления доставляют в аварийный район наземными транспортными средствами или транспортной авиацией 19.
Блок 33 посредством каналообразующего устройства 17 принимает и распознает входные данные от внешних источников информации.
Блок 33 принимает задачу мониторинга от органа управления аварийно-спасательными работами и первичные сведения об аварийном источнике и районе аварии, дешифрует и распознает тип информации, передает в блок управления беспилотными комплексами мониторинга 34.
Программно-аналитический блок 34, определяя области мониторинга, требования эффективности мониторинга и передает в блок планирования мониторинга 32. Формирует запросы о гидрометеорологической и экологической обстановке в районе мониторинга для ближайших гидрометеорологических и экологических постов, параметрах аварийного источника, чрезвычайных ситуациях в районе аварии, таких как пожары, подтопления, разрушения и пр. для служб ЧС. Передают запросы в блок 31. Блок 31 формирует и кодирует сообщения по установленным протоколам обмена и передает соответствующим адресатам посредством каналообразующего устройства 17.
Поступающие данные блок 33 систематизирует и передает в соответствующие программно-аналитические блоки: данные о гидрометеорологической обстановке передают в блок 26; экологической обстановке передает в блок 27; данные о параметрах аварийного источника в блок 29; данные от службы чрезвычайных ситуаций в блок 30. В программно-аналитических блоках 26 и 27 учитывают данные измерений стационарных постов 19 и 20. В блоках 26, 27 и 29 программным обеспечением по известным моделям прогнозируют обстановку в районах мониторинга на заданное время. Результаты прогноза передают по установленным протоколам обмена в блок 30. В блоке 30 формируют общую модель обстановки в районе мониторинга с учетом топографии местности, инфраструктуры и областей повышенной опасности (ЧС). Результаты предварительного прогноза обстановки в районе мониторинга передают в блок планирования многопараметрического мониторинга 32.
Программным обеспечением блока 32 осуществляют планирование многопараметрического мониторинга с заданными показателями эффективности и прогнозируемой ситуационной обстановки на заданное время. Выполняет расчетно-аналитические задачи: расчета точек контроля для требуемой эффективности выявления метеорологической, гидрологической обстановки в районе аварии; расчета точек контроля для требуемой эффективности выявления экологического мониторинга района аварии; планирования маршрутов мониторинга для РТС наземного, воздушного и подводного базирования по данным геоинформационной системы и данным ситуационной осведомленности мобильных постов. Формирует маршрутные задания для беспилотных мобильных комплексов мониторинга, передают в блок 34.
В блоке 34 исходя из технических характеристик беспилотных комплексов многопараметрического мониторинга рассчитывают состав беспилотных комплексов многопараметрического мониторинга и состав подгрупп датчиков измерений параметров окружающей среды (сменных целевых нагрузок) для выполнения поставленной задачи мониторинга в заданных условиях. Передают задания соответствующим беспилотным мобильным комплексам многопараметрического мониторинга 1, 2 и 3 посредством каналообразующих средств 14 в блоки приема и анализа данных 12.
Блок 12 систематизирует и передает управляющие команды на пульты управления РТС 1.1, 2.1, 3.1, в процессе мониторинга ретранслирует запросы на пульт управления группой датчиков 11.
Мобильные посты готовят к работе по полученному заданию.
Мобильные и стационарные посты осуществляют многопараметрический мониторинг в сфере функционирования базовых роботизированных средств выбранной для выполнения задачи мониторинга подгруппой датчиков (целевой нагрузки) и передают данные бортовых контроллеров функционирования РТС на пульты управления РТС (1.2. 2.2 и 3.2), телеметрические данные подгрупп датчиков на приемопередающее устройство 11.
Бортовые блоки 8 осуществляют опрос функционирующих датчиков 7 с заданной периодичностью или по сигналу от пульта управления датчиками мониторинга, поступающего с приемопередающего устройства 11, формируют кодированное сообщение, которое передают в приемопередающее устройство 9 и записывают на энергонезависимом запоминающем устройстве.
Пульты управления РТС 1.1, 2.1, 3.1 и пульт управления группой датчиков 11 передают данные в блок систематизации 13, который распознает и формирует сообщения в соответствие с установленным протоколом обмена и передает посредством каналообразующих устройств 14 на центральный пункт управления системой.
Блок 25 выполняет аналитические задачи систематизации разнородных входных данных по их типам и группирование данных для передачи аппаратно-программным блокам 26, 27, 28, 29, 30. В блок 34 передает весь объем поступающих данных.
Блок 34 осуществляет контроль и коррекцию заданий выполнения мониторинга района аварии и архивирование данных на постоянное запоминающее устройство (сервер).
Блоки 26, 27, 29 осуществляют прогнозирования соответственно гидрометеорологической обстановки, экологической обстановки, физического воздействия источника на среду, блок 28 формирует изолинии концентраций загрязняющих примесей по фактическим данным экологического контроля.
Блок моделирования динамических параметров среды 26 выполняет расчетно-аналитические задачи: параметризации пограничного слоя атмосферы; параметризации гидрологических характеристик акваторий; параметризации гидротермодинамических характеристик почвы.
Блок моделирования экологической обстановки 27 выполняет расчетно-аналитические задачи переноса примеси по известным методикам в пограничном слое атмосферы, акваториях, грунте и ассимиляции данных экологического мониторинга в результаты прогноза экологической обстановки.
Блок построения и оценки фактической экологической обстановки 28, который выполняет расчетно-аналитические задачи, в частности, расчеты изолиний концентраций техногенной примеси на суше на данные интервалы времени, изолиний концентраций примеси в акватории на заданные интервалы времени, параметров выброса техногенной примеси из аварийного источника.
Блок моделирования физического воздействия аварийного источника на окружающую среду 29, который выполняет расчетно-аналитические задачи, в частности, расчеты воздействия удара взрывной волны, расстояния и направления разброса частей источника взрыва, параметров термического воздействия.
Расчетно-аналитический блоки 26, 27, 28, 29 передают данные в блок 30, который формирует комплексную оценку ситуационной обстановки в районе техногенной аварии по данным мониторинга, формирует отчет и передает в блок 31 и 32. Блок моделирования комплексной обстановки 30 в частности включает расчетно-аналитические задачи: распознавания заданных объектов в данных мониторинга; систематизации и обобщения данных многопараметрического мониторинга.
Блок 31 формирует кодированные сообщения по установленным протоколам обмена и передает органу управления посредством каналообразующего блока 17.
Блок 32 проводит анализ соответствия фактической и прогнозируемой обстановки, при необходимости проводит корректировку заданий для беспилотных мобильных комплексов и передает в блок 34.
Алгоритм работы системы циклически повторяют по мере выявления обстановки в районе аварии с целью уточнения фактической обстановки и дальнейшего прогнозирования ее развития.
Введение в состав робототехнических комплексов аварийно-спасательных формирований целевых нагрузок многопараметрического мониторинга расширит их функциональность за счет возможности ведения комплексной разведки местности в районе техногенной аварии. Возможность варьировать разнородные целевые нагрузки при одновременном задействовании в системе мониторинга однотипных и разнородных мобильных постов позволяет повысить эффективность получения объективной информации о состоянии окружающей среды в районе аварии в соответствии с задачами аварийно-спасательных работ независимо от местоположения аварийного источника. Оперативная расчетно-аналитическая обработка данных позволяет оперативно прогнозировать и оценивать ситуацию в зоне функционирования мобильных постов и аварийно-спасательных формирований и в режиме реального времени осуществлять динамической управление работами аварийно-спасательными и системой многопараметрического мониторинга. Введение в состав системы энергонезависимых запоминающих устройств позволит обеспечить полноту передачи данных функциональных блоков мобильного постов в случае задержки передачи данных в каналах связи или потери связи с пунктом управления. Ретрансляторы радиосигналов, размещенные на БЛА, обеспечивают оперативность передачи данных от наземных и подводных мобильных постов на центральный пункт управления в случае превышения дальности сигнала связи или его перекрытия естественными и техногенными преградами. Использование робототехнических платформ в качестве носителей датчиков мониторинга исключает или минимизирует воздействие вредных и опасных факторов на персонал в процессе мониторинга района аварии.
Соответствие критерию «новизна».
Предлагаемая техническая система является новой, поскольку в известных системах не используют гибридные робототехнические системы для мониторинга состояния окружающей среды в районе техногенной аварии, функционирующих одновременно и согласованно в едином информационном и управленческом пространстве в атмосфере, на земле и под водой.
Соответствие критерию «изобретательский уровень».
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что известные робототехнические комплексы используют для многопараметрического мониторинга окружающей среды в районе техногенной аварии.
Соответствие критерию «промышленная применимость».
Конструкция датчиков первой, второй и третьей групп предложенной системы экологического мониторинга района аварии, а также их носителей, основана на использовании известных элементов и технических трудностей для реализации не представляет.
Технико-экономическая эффективность.
Предлагаемая система многопараметрического мониторинга окружающей среды в районе техногенной аварии обеспечивает повышение эффективности оценки экологической обстановки и ситуационной осведомленности в районе аварии, чем способствует рациональному планированию работ по ликвидации последствий техногенной аварии, обеспечивающему сохранение жизни и здоровья персонала аварийно-спасательных формирований и населения, оказавшегося в районе аварии и экономическую эффективность. Предлагаемая техническая система может быть создана на базе широко используемых в аварийно-спасательных подразделениях гибридных робототехнических мобильных комплексов за счет расширения перечня сменных целевых нагрузок и программного обеспечения пункта управления, что расширит их функциональные возможности.
Список литературы
1. Половко С.А., Попов А.В. Перспективы применения гибридных групп мобильных роботов специального назначения // Труды Международной научно-технической конференции «Экстремальная робототехника и конверсионные тенденции» - СПб.: ЦНИИ РТК. - 2018. - С. 25-33.
2. Липовский Д.Д., Денисеня Ю.А., Васильев А.В. Специальные требования к робототехническим комплексам войск радиационной, химической и биологической защиты // Труды Международной научно-технической конференции «Экстремальная робототехника и конверсионные тенденции». - СПб.: ЦНИИ РТК. - 2018. - С. 361-366.
3. Дмитриев С.А. Направления развития робототехнических комплексов в системе МЧС России // Сборник трудов XXVIII Международной научно-практической конференции «Предотвращение. Спасение. Помощь» секция №5 «Применение робототехнических комплексов специального назначения». - М.: Академия гражданской защиты МЧС России. - 2018.
4. Репина И.А., Варенцов М.И., Чечин Д.Г. и др. Использование беспилотных летательных аппаратов для исследования атмосферного пограничного слоя // Инноватика и экспертиза. - 2020. - Вып. 2 (30) - С. 20-39.
5. Rautenberg A., Graf M.S., Wildmann N. Reviewing Wind Measurement Approaches for Fixed-Wing Unmanned Aircraft // Atmosphere - 2019 - 422. - Электрон, ресурс: www.mdpi.com/journal/atmosphere; doi: 10.3390/atmos9110 422 - Загл. в экрана.
6. Ханов Э.Б. Комплексы оповещения населения, поиска пострадавших и экстренной связи в чрезвычайных ситуациях // VI форум МЧС России и общественных организаций «Общество за безопасность». Авиационные спасательные технологии в обеспечении комплексной системы безопасности в Арктическом регионе. - С. 76-82
7. Власенко А.Н., Ивашева А.Ю., Лапин О.Е., Микуцкий В.Г., Семенихин П.В. Система для автономного мониторинга радиационной обстановки вокруг атомной электростанции // Труды Международной научно-технической конференции «Экстремальная робототехника и конверсионные тенденции». - СПб.: ЦНИИ РТК. - 2018. - С. 139-147.
8. Пашкевич М.А., Смирнов Ю.Д., Данилов А.С. Оценка качества окружающей среды с применением малогабаритных беспилотных летательных аппаратов // Записки горного института. - 2013. - Т. 204 - С. 269-271.
9. Абросимов В.К., Мочалкин А.Н., Татаренко Е.И. Морской роботизированный комплекс для решения задач ситуационной осведомленности в акваториях // Труды Международной научно-технической конференции «Экстремальная робототехника и конверсионные тенденции». - СПб.: ЦНИИ РТК. - 2018. - С. 509-512.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА АТМОСФЕРНОГО ВОЗДУХА ГОРНОПРОМЫШЛЕННОЙ ПРОМАГЛОМЕРАЦИИ | 2013 |
|
RU2536789C1 |
| СПОСОБ СБОРА ИНФОРМАЦИИ ОБ ЭКОЛОГИЧЕСКОМ СОСТОЯНИИ РЕГИОНА И АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2010 |
|
RU2443001C1 |
| Способ определения высоты шероховатости поверхности водоема | 2022 |
|
RU2796383C1 |
| Способ определения усредненных значений метеорологических параметров в пограничном слое атмосферы | 2019 |
|
RU2727315C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВОЗДУШНОГО МОНИТОРИНГА | 2015 |
|
RU2612754C1 |
| Способ определения класса устойчивости атмосферы по измерениям метеорологических параметров беспилотным летательным аппаратом | 2021 |
|
RU2756031C1 |
| СПОСОБ КОМПЛЕКСНОГО МОНИТОРИНГА ПРИРОДНОЙ СРЕДЫ | 2017 |
|
RU2680652C2 |
| Способ определения параметров аварийного радиационного источника по данным воздушной радиационной разведки местности | 2021 |
|
RU2755604C1 |
| Способ поиска и идентификации токсичных осколков разрушившегося в результате аварийных воздействий ядерно- и радиационно опасного объекта | 2020 |
|
RU2746840C1 |
| Способ мониторинга окружающей среды и беспилотный аппарат для использования в данном способе | 2016 |
|
RU2645249C1 |
Изобретение относится к автоматизированным системам мониторинга состояния окружающей среды для прогнозирования экологических последствий и развития техногенной аварийной ситуации. Система мониторинга содержит беспилотные комплексы воздушного, наземного и подводного мониторинга, с мобильными постами и введенными беспилотным летательным аппаратом, мобильным роботом, необитаемым подводным аппаратом с комплектом датчиков многопараметрического мониторинга, с подгруппами датчиков параметров среды функционирования робота, экологического контроля и ситуационной осведомленности; пункты управления беспилотными комплексами, сбора, обработки и передачи данных на центральный пункт управления; центральный пункт управления и моделирования обстановки, содержащий программно-аппаратные комплексы для решения расчетно-аналитических задач планирования мониторинга с заданными требованиями эффективности и моделирования обстановки в районе техногенной аварии по данным мониторинга. Технический результат - увеличение количества и качества многопараметрических измерений в режиме реального времени одновременно в воздухе, воде и на грунте в районе техногенной аварии, независимо от его географического местоположения; расширение функциональных возможностей гибридных робототехнических комплексов аварийно-спасательных формирований. 2 ил.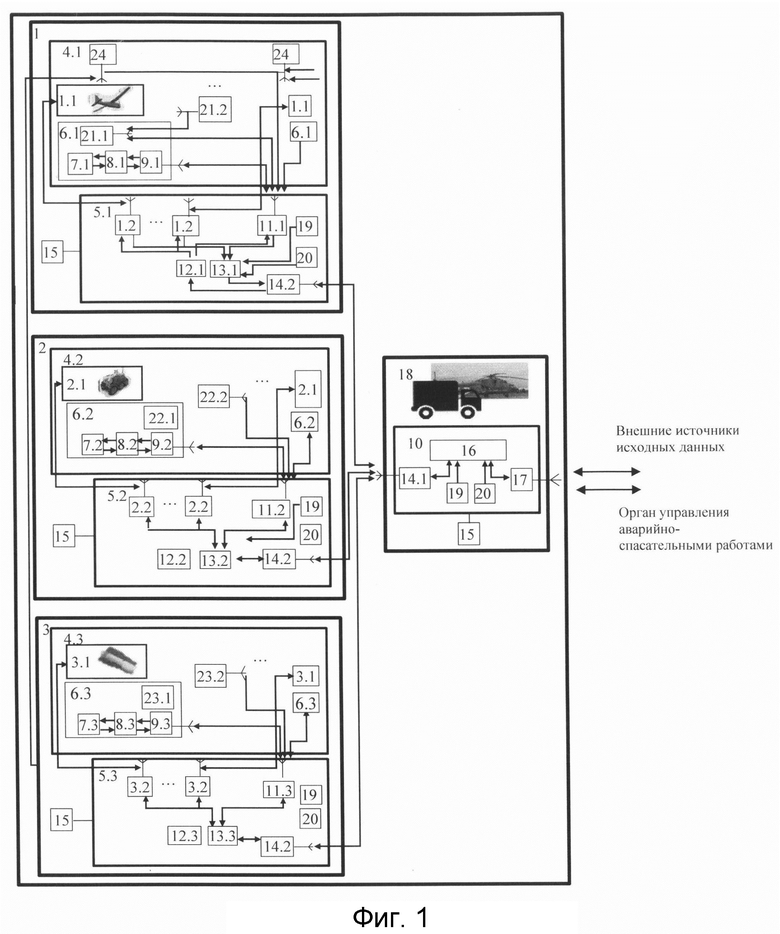
Система многопараметрического мониторинга района техногенной аварии, содержащая электротранспортные средства, первую и вторую группы датчиков контроля параметров атмосферы, первая группа датчиков установлена на беспилотные летательные аппараты, средства беспроводной связи датчиков контроля параметров среды с пунктом управления, систему GPS, метеостанции, центральный пункт управления и моделирования, который содержит блок моделирования метеопараметров, блок прогноза загрязнения техногенной примесью, отличающаяся тем, что в систему в качестве электротранспортных средств дополнительно введены мобильные роботы (MP) и необитаемые подводные аппараты (НПА) соответственно в наземный и подводный беспилотные комплексы многопараметрического мониторинга, и средство транспортирования беспилотных комплексов многопараметрического мониторинга и центрального пункта управления и моделирования к месту аварии; вторая группа датчиков установлена на мобильные роботы, в систему дополнительно введена третья группа датчиков контроля параметров гидросферы, которая установлена на подводный необитаемый аппарат, в группы датчиков введены подгруппы датчиков многопараметрического контроля состояния среды, которые выполнены в виде сменных целевых нагрузок, и подгруппа автономных автоматических датчиков долговременного дистанционного контроля параметров среды, доставляемых и устанавливаемых в интересующие области района техногенной аварии робототехническим средством, подгруппы датчиков многопараметрического контроля состояния среды содержат подгруппу датчиков параметров среды, подгруппу датчиков экологического контроля, подгруппу датчиков ситуационной осведомленности; система содержит воздушный, наземный и подводный беспилотные комплексы многопараметрического мониторинга и средства транспортирования беспилотных комплексов и центрального пункта управления к месту аварии, беспилотные комплексы многопараметрического мониторинга содержат мобильный пост многопараметрического мониторинга, стационарный пост метеорологического и экологического мониторинга в месте размещения пункта управления и пункт управления беспилотным комплексом, мобильный пост содержит не менее чем одно робототехническое средство, не менее чем одну группу датчиков контроля параметров среды функционирования мобильного поста, подгруппы которых соединены с бортовым компьютером управления и обработки данных мониторинга, который соединен с бортовым устройством прямой и обратной связи с пунктом управления беспилотным комплексом, беспилотные комплексы многопараметрического мониторинга функционируют одновременно и согласованно по программам центрального пункта управления и моделирования, содержащего программно-аппаратные модули, обеспечивающие решение расчетных и аналитических задач моделирования и оценки фактического и прогнозируемого состояния окружающей среды в районе техногенной аварии по данным многопараметрического мониторинга и данным, поступающим по каналам связи от внешних источников информации, динамичного управления беспилотными комплексами многопараметрического мониторинга с заданными требованиями эффективности.
| СИСТЕМА ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И ПРОГНОЗИРОВАНИЯ ЗАГРЯЗНЕНИЯ АТМОСФЕРЫ ПРОМЫШЛЕННОГО РЕГИОНА | 2011 |
|
RU2466434C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2006 |
|
RU2324957C1 |
| Способ определения параметров аварийного радиационного источника по данным воздушной радиационной разведки местности | 2021 |
|
RU2755604C1 |
| СПОСОБ КОМПЛЕКСНОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2021 |
|
RU2778495C1 |
| СПОСОБ ПОЛУЧЕНИЯ ГЕКСАФТОРЭТАНА | 1997 |
|
RU2124493C1 |
| АВТОМАТИЧЕСКОЕ ПЕРЕКЛЮЧАЮЩЕЕ УСТРОЙСТВО СТРЕЛЯЮЩЕЙ СКВАЖИННОЙ АППАРАТУРЫ | 0 |
|
SU213733A1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Технологии дистанционного мониторинга крупных пожаров с использованием беспилотных авиационных систем: монография / А | |||
| В | |||
| Кузнецов, Н | |||
| Г | |||
| Топольский, М | |||
| О | |||

