(5) ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Тензометрическое весоизмерительное устройство | 1980 |
|
SU964476A2 |
| Тензометрическое весоизмерительное устройство | 1976 |
|
SU581386A1 |
| Тензометрическое устройство с автоматической установкой нуля | 1972 |
|
SU446838A1 |
| Тензометрическое весоизмерительное устройство | 1985 |
|
SU1268960A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1992 |
|
RU2039956C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 1999 |
|
RU2162238C1 |
| ЗАДАТЧИК МОЩНОСТИ РЕГУЛЯТОРА ЭЛЕКТРИЧЕСКОГО РЕЖИМА ДУГОВОЙ ПЕЧИ | 2008 |
|
RU2402890C2 |
| Кондуктометрический анализатор | 1982 |
|
SU1037155A1 |
| Управляемый мультивибратор | 1986 |
|
SU1420646A1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ РАЗБАЛАНСА МОСТОВОЙ СХЕМЫ В ЧАСТОТУ ИЛИ СКВАЖНОСТЬ | 2018 |
|
RU2699303C1 |
1
Изобретение относится к электро-. измерительной технике, а более конкретно к устройствам для измерения неэлектрических величин электрическими методами, и может быть использовано для работы с мостовыми, датчиками, например для измерения деформаций с помощью тензорезисторов.
Известно устройство для измерения неэлектримеских величин, содержащее мостовой датчик и о перационные усилители С1 .
Недостаток этого устройства - невозможность коррекции нелинейности датчика разных знаков без дополнительных пересоединений внутри устройства.
Наиболее близким к предлагаемому является тензометрическое весоизмерительное устройство, содержащее генератос импульсов с времязадающей КС-цепью, блок согласования, мостовой датчик,в измерительную диагональ которого включен потенциометр, согласующий усилитель и дополнительный усилитель. Это устройство позволяет одним регулировочным элементом ( потенциометром) регулировать как знак, так и глубину производимой коррекции нелинейности, присущей данному конкретному датчику С 2 .
Недостатком известного устройства является невозможность обеспечить компенсацию параболически нелинейной характеристики мостового датчика в случае питания датчика током постоянной- амплитуды, что снижает точность измерения. Такое питание применяется для компенсации тем. пературной погрешности полупрово1цниковых датчиков структуры кремний на сапфире.
Цель изобретения - повышение точности измерения за счет компенсаций нелинейности датчика.
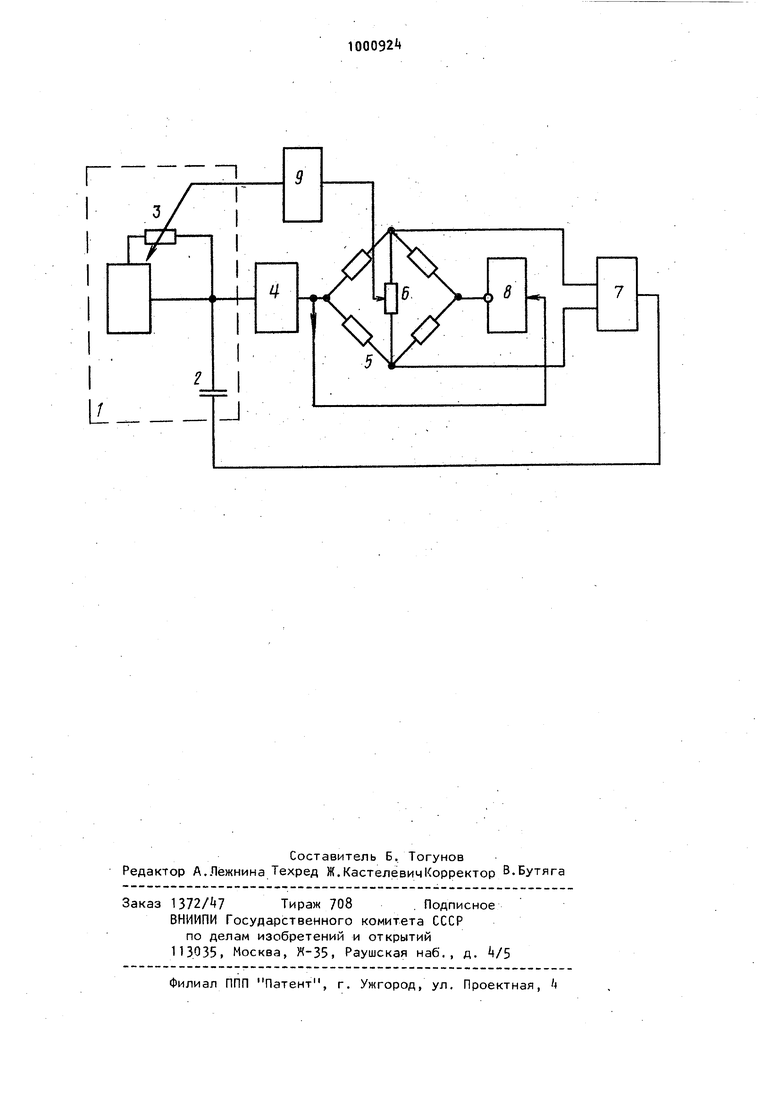
Указанная цель достигается тем, что в тензомет|эическом устройстве, содержащем генератор импульсов с времязадающей RC-цепью, блок согласования, вход которого соединен с соединенными между собой выводами элементов RC-цепи, а выход - с вершиной диагонали питания мостовогс датчика, в измерительную диагональ которого включены потенциометр и входы согласующего усилителя, выход которого через один из элементов RC-цепи, например конденсатор, соединен с входо блока согласования, другой элемент RC-цепи выполнен управляемым и в уст ройство введены инвертор и блок упра ления, причем вход блока управления .соединен с движком потенциометра, а выход - с управляющим входом другого элемента RC-цепи, а инвертор включен в диагональ питания мостового датчика так, что его вход соединен с выходом блока согласования, В качестве управляемого элемента времязадающей цепи предлагается ислользовать резисторный оптрон. Управляемый элемент можно реализовать также на основе резисторной матрицы, управляемой цифровым кодом. В качестве генератора импульсов предлагается также использовать операционный усилитель с программным управлением, вход управления коэффициентом передачи которого соединен с выходом (лока управления. ма чертеже приведена схема предлагаемого устройства. Устройство содержит генератор 1 и пульсов с времязадающей RC-цепью, со стоящей из конденсатора 2 и управляемого резистора 3, блок k согласования, мостовой датчик 5, потенциометр 6, согласующий усилитель 7, инвертор 8 и блок 9 управления. Выходным параметром устройства является период выходного сигнала ге нератора. Блок k согласования и инвертор 8 питают мост парафазным напряжением, так, что в измерительной диагонали моста присутствует только дифференциальный сигнал (синфазный сигнал от сутствует ). Коэффициент передачи моста К определяется относительным изменением to сопротивления тензорезисторов eR p(m) М, (1) где р(т) - многочлен чувствительности резисторов к внешнему воздействию М. Для тензорезисторных мостовых датиков силы наиболее типична параболиеская нелинейность, т.е. . р(т) fiCUjrM)., (2) де /ь и -j- - коэффициенты. У линейного датчика р(т)р и отосительное отклонение от линейности ри условии (2 ) имеет вид: Г gд-J-. Длительность периода выходного сигг ала Т, и напряжения питания моста ависит от разбаланса моста и при реднем положении движка потенциомета 6 при линейном датчике пропорциоальна это)- разбалансу TX Toll + к), 3 де Т 0RC-период при разбалансе . датчика ( ); С ,R- пapaмeтpы элементов времязадающей RC-цепи.; резистора 3 и конденсатора 2 соответственно; О - коэффициент, занисящий от конкретного исполнения генератора ; K.t2iK K.K - коэффициент передачи такта управления эффективным значением емкости конденсатора 2; Кд- коэффициент передачи блока согласования К-.- коэффициент передачи согласующего усилителя 7. Коэффициент передачи инвертора 8 KQ -1.. ® При любом.ином положении движка потенциометра 6 пропорциональность нарушается и длительность переиода начинает нелинейно зависеть от коэффициента передачи мостового датчика. Величина и знак этой нелинейности однозначно связаны с положением движка потенциометра 6, поэтому, изменяя последнее, можно добиться компенсации нелинейности коэффициента передачи мостового датчика любого знака. При смещении движка потенциометра 6 от среднего положения величина сопротивления R управляемого резистора 3, выполненного одним из вышеуказанных способов, начинает зависеть от разбаланса датчика. Это управление осуществляется выходным сигналом блока 9 управления (,()), (-4) где ot - коэффициент управления величиной R выходным сигналом моста через цепь, состоящую из потенциометра 6 и блока 9 управления. Таким образом, с учетом выражения С Ц ) зависимость (, 3 ) выглядит сл дующим образом: {-и-рм(2 ).fbM2( .2осУгVi T 1j Условием компенсации параболической нелинейности является равенство нул коэффициента при М , т.е. сГ 2КД 4:2с6/ьК4К-,о, (Ь) отсюда . Величина коэффициента сС однознач но связана с положением движка поте циометра 6. Таким образом, предлагаемое устройство, обеспечивая коррекцию нелинейности любого знака, дает возможность повысить точность измерени нужной неэлектрической величины в различных областях электроизмерител ной техники, например в тензометрии при измерении усилий и давлений. Формула изобретения
Источники информации, принятые во внимание при экспертизе
по заявке № 32104l7i кл. G 01 R 17/10 1980. 4 через один из элементов RC-цепи, например конденсатор, соединен с входом блока согласования, отличающееся тем, что, с целью повышен 1я точности измерения за счет компенсации нелинейности датчика, другой элемент RC-цепи выполнен управляемым и в устройство введены инвертор и блок управления, причем вход блока управления соединен с движком (Потенциометра, а выход - с управ|ляющим входом другого элемента ВСгцепи, а инвертбр включен в диагональ питания мостового датчика так, что его вход соединен с выходом блока согласования. 2.Устройство по п.1, от л ичающееся тем, что управляемый элемент RC-цепи выполнен в виде резисторного оптрона. 3.Устройство по п.1, о т л и чающееся тем, что управляемый элемент RC-цепи выполнен в виде резисторной матрицы, управляемой цифровым кодом. . . t. Устройство по п. 1, о т л и чающееся тем, что генератор импульсов выполнен на основе .операционного усилителя с программным уп- . равлением, вход управления коэффициентом передачи которого соединен с выходом блока управления. .
