(54) ПЕНСХ:НИМАТЕаЬ ФЛОТАЦИОННОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Пеносниматель флотационной машины | 1984 |
|
SU1207501A1 |
| УПОРНЫЙ ПОДШИПНИК | 1991 |
|
RU2020307C1 |
| Подшипниковый узел ротора винтового компрессора | 2019 |
|
RU2702812C1 |
| Судовой валопровод | 1983 |
|
SU1134480A1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ ГИДРОМАШИНА С ПРИВОДНЫМ НАКЛОННЫМ ДИСКОМ | 2014 |
|
RU2567157C2 |
| Устройство для аэрации жидкости | 1978 |
|
SU749435A1 |
| Центробежная литейная машина с вертикальной осью вращения | 1976 |
|
SU643229A1 |
| МУФТА ГИДРОДИНАМИЧЕСКАЯ | 2006 |
|
RU2353834C2 |
| ПРИВОД ВАЛКА ПРОКАТНОЙ КЛЕТИ С ПЕРЕКОШЕННЫМИ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ВАЛКАМИ, УСТАНОВЛЕННЫМИ В КЛЕТИ С ВОЗМОЖНОСТЬЮ ОСЕВОГО ПЕРЕМЕЩЕНИЯ | 1995 |
|
RU2084299C1 |
| ОСЕВОЙ ЭЛЕКТРОВЕНТИЛЯТОР | 2004 |
|
RU2253045C1 |
1
Изобретение относится к обогащению полезных ископаемых методом 4лотааии, в частности к устройствам для удаления минерализованной пены с поверхности фпотаинонных машин при обогащении горнорудного, угольного, коксохимического сырья.
Известны пеноснимателн флотаинонных машин, содержащие приводы и установленные вдоль машины валопроводы,
СОСТОЯЩНе из подшипниковых опор в КЗ
ряда последовательно соединенных валов с лопастями, укрепленными на этих валах Для удаления пенного продукта флотации J. Соединение валов в валоцроводе таких пеноснимателей осуществляется упруШМИ или жесткими муфтами.
Известен пеносннмательфлотационной машины, в котором валы соединены в один многоопорный валопровод при помощи cBapKH 2i
В таких пеноснимателях соединения и опорные части валов не могут компенсировать перекоса или несоосности, связанных с неточностью изготовления или монтажа. Это приводит к повышенному износу подшипников и шеек валов, что является одной из причин снижения их работоспосо ости, снижения надежности и долговечности при передаче нагрузок. В результате повышенного износа втулок подшипников нарушаются посадочные размеры шеек валов, что ведет к необходимости частой замены валов при ремонте.
10
Наиболее близким к изобретению по технической сущности и достигаемому результатуявляется пеносниматель флотационной машины, включакший привод, подшипниковые опоры, валопровод из ря15да последовательно соединенных валов с укрепленными на них лопастями fS,
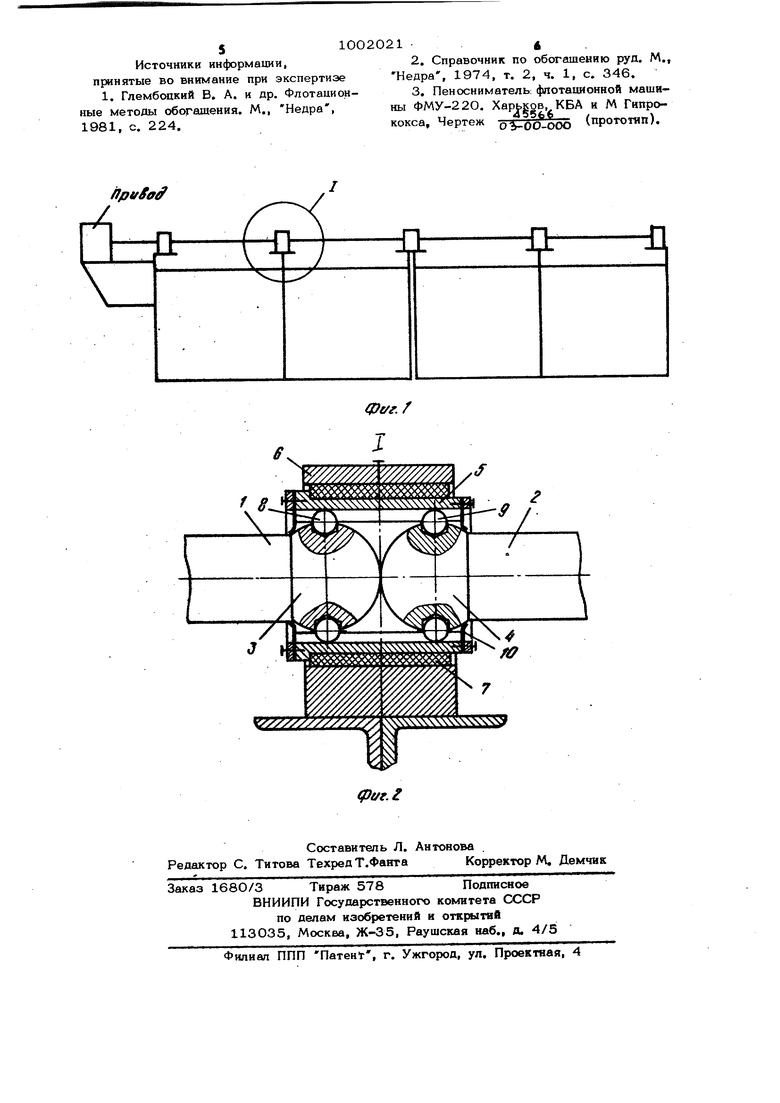
Такой пеносниматель, составленный из четырех валов для двухкамерной секJQ ции машины, требует применения восьми опор, пЪскольку каждый вал устанавливается в двух сферических шарикоподшипниках. Валы соединены между,- собой кулачковыми муфтами, а взаимнор цент310рирование их обеспечивается тем, что конец одного вала, выполненный сферическим, входит во втулку, выполненную ш конце второго вала. Центрирование ван лов тремя опорными поверхностями (подшипниковыми опорами с краев и опорной поверхностью соединительной муфты в средней части) требует высокой точности подгонки и установки валов. Отклонение любой из этих опорных поверхностей от общей оси влечет наклон одного из валов, соединение, которого с последующим валом, установленным на общей оси, изгибает его при монтаже. Это приводит к возникновению дополнительных напряже- is из НИИ в валах и сил упругости в опорах, что вызывает необходимость увеличить поперечное сечение валов и мощность электродвигателя привода пеноснимателя. Целью изобретения является повышение надежности упрощения конструкции, монтажа и ремонта пеноснимателей флотационных машин. Цель достигается тем, что пеносниматель фпотационной машины, включаюпдай привод, подшипниковые опоры, валопровоя из ря&в последовательно соединенных валов с укрепленными на них лопастями, Пеносниматель флотационной машины снабжен обоймами с продольными пазамя и телами качения, при этом концы валов ввлопровода выпопнены сферическими с пункамк на поверхности и соеданены друг с другом обоймами, помешен Ньдми в общих для обоих концов валов под шипниковые оиорны, причем концы валов с обоймой соединены телами качения, вложемнь1ми в лунки на сферах валов и в соответствуюцие лункам продольные пазы обоймы. На фиг. 1 изображен Пеносниматель, вид сбоку; на фиг. 2 - узел J на фиг. 1. Каждый из соединяемых валов валсяро вода, например, вал 1 и вал 2.,своими сферическими концами 3 и 4 вставлены в обойму 5, помещенную в общий для обо их валов опорный подшипник, состоящий из корпуса 6 и металл окерамической са мосмазьтаюшейся втулки 7. На поверхностях сфер 3 и 4 в диаметральной плоскости, перпендикулярной оси вала, вьшолнены лунки на глубину половины диаметра вложенных в них шариков 8 и 9 (тел ; качения). Выступающая часть шариков входит в соответствующие лункам продоль .ные пазы обоймы 5. Внутренняя полость о(5оймы 5 заполнена смазкой и закрыта с ropuoB уплотнениями 10. 214 Пеносниматель работает следующим образом, Вращение от привода передается на вал 1 пеноснимателя, который своим сферическим концом 3 через шарики 8 передает крутящий момент обойме 5. Обойма 5, вращаясь, передает крутящий момент валу 2 через шарики 9. Подобным образом работают остальные соединения валов пеноснимателя. Валы, опираясь сферическими концами на внутреннюю поверхность обоймы 5, создают равномерную нагрузку на втулку 7 опорного подшипника. Перенос или биение любого валов компенсируются поворотом вала 1 или 2 в обойме 5 вокруг осей сфер 3 и 4. Характер нагрузки на втулку 7 при этсяи не меняется. Пеносниматель обладает повышенной надежностью, в нем упрощен монтаж тем, что установка валов своими сферическими концами в обойме компенсирует их перекос, биение и несоосность, причем нагрузка на втулки подшипников передается обоймой равномерно, уменьшая удельное давление на их внутреннюю поверхность. Упрощение конструкции пеноснимателя флотационной машины вызвано тем, что умень шается количество опор валопровода, ремонт упрощается тем, что при износе трущихся поверхностей замене подлежат втулка и обойма. Таким образом, конструкция пеноснимателя повышает его надежность, упрощает монтаж и ремонт. Формула изобретения Пеносниматель флотационной машины, включающий привод, подшипниковые сяюры, вапопровод из ряда последовательно соединенных валов с укрепленными на них лопастями, отли чающийся тем. что, с целью повышения надежности и упрошения KOHCTfi KUHH, монтажа и ремонта, Пеносниматель фпотационной машины снабжен обоймами с продольными пазами и телами качения, при этом коноы валов вапопровода вьтолнены сферическими с лунками на поверхности и соединены друг с другом обоймами, помешенными в об - шие для обоих концов валов подшипниковые опоры, причем концы валов с обоймой соединены телами качения, впоженными в лунки на .сферах валов и в соответствуюшие лункам продольные пазы обоймы. Источники информации, принятые во внимание при экспертизе 1. Глембсдакий В. А. и др. Флотационные методы обогащения, М., Недра, 1981, с. 224, 10О 1 .А 2,Справочник по обогащению руд, М,, Недра, 1974, т, 2, ч, 1, с. 346. 3.Пеносниматель: флотационной машины ФМУ-22О, Харьков, КБА н М Гипрококса. Чертеж (прототип).
ijpt/fo
il
Ь
