(54) СТАВ ИЛИ ЗАТОР ПОСТОЯ ИНОГО РЕРУЛИ РУЕМОГС)
1
Изобретение относится к электро- , технике, в частности к стабилиэирюванным источникам тока.
Известен стабилизатор постоянного регулируемого тока, содержащий силовой регулятор, измерительно-усилительный блок, датчик тока и источник опорной величины, в качестве которого используется прецизионный цифроаналоговый преобразователь, обеспечивакнций возможность управления стабилизатором с помощью ЭВМ 1.
Наиболее существенный недостаток известного устройства заключается.в том, что оно теряет способность управляться от ЭВМ при использовании в нем датчиков тока с S-образной выходной характеристикой, которой обладает ряд перспективных датчиков тока, например датчик магномодуляционного типа, или основанные.на использовании явлений ядерного и электронного, резонанса.
Наиболее близким техническим решением к изобретению является стабилизатор постоянного регулируемого тока, содержащий силовой- регулятор, соединенный через датчик тока с клеммами для подключения нагрузки, управляющий вход силового регулятора подклюТОКА
чен к выходу измерительнотусилительт ного блока, входы .которого соединены соответственно с источником опорного напряжения и выходом датчика . .
тока, который выполнен в виде преобразователя ток - магнитная индукция .ток, включающего первичную обмотку, включенную последовательно с силовым
Q регул5ятором, и две обмотки,каждая из которых состоит из отдельных секций с разным числом витков, двух цифровых переключателей делителя тока и эталонного резистора, выход первого цифрового переключателя подклю15 чен к первой обмотке преобразователя ток -магнитная индукция - ток, выход делителя тока соединен со звходом второго цифрового переключателя, выход которого подключен ко второй
20
обмотке преобразователя, а управляющие входы цифровых переключателей подключены.к выходу блока прогрсмного управления.
25
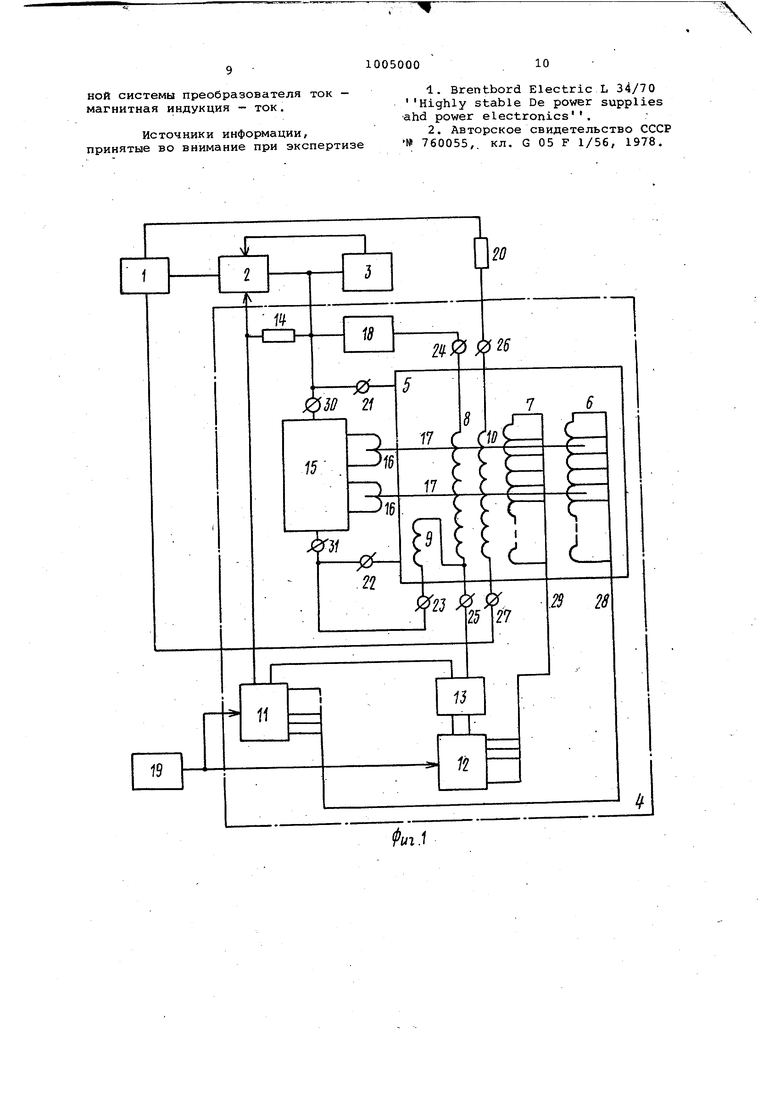
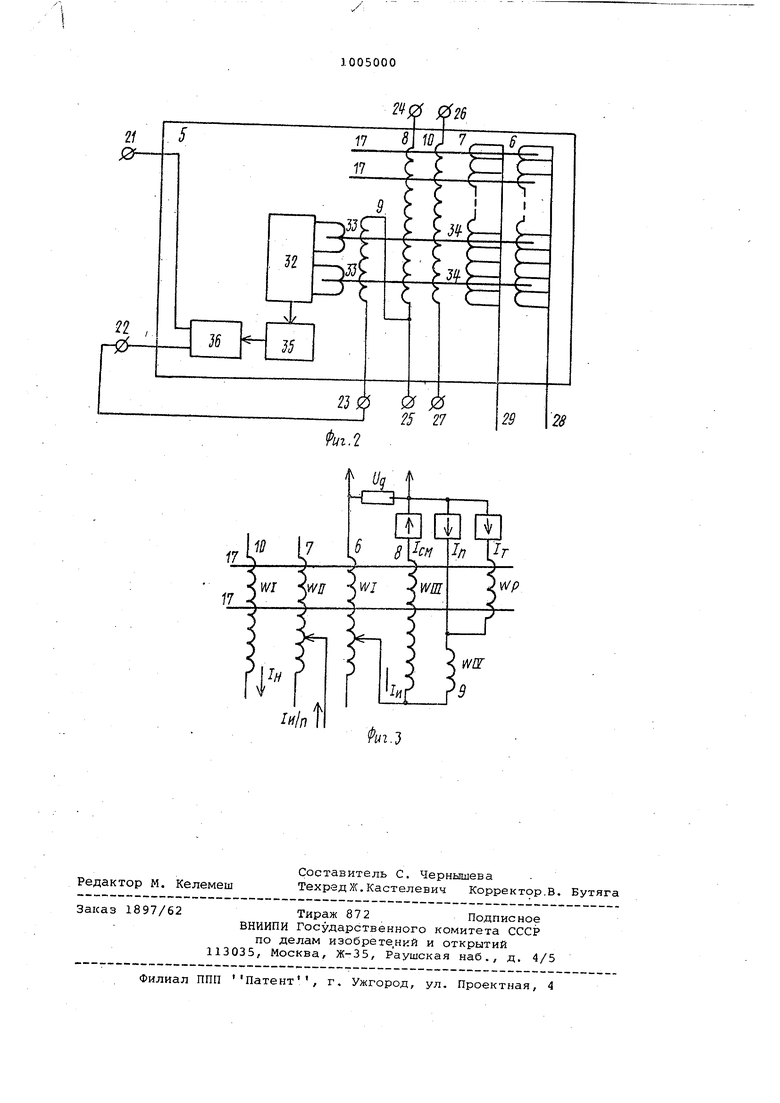
Недостатком этого известного устройства является снижение надежности его работы, проявляющееся в срыве . стабилизации, если в ходе технологического процесса происходит измене30 ние величины сопротивления нагрузки. Цель изобретения - повышение надежности функционирования устройств при изменении величины сопротивления нагрузки в ходе технологическог процесса. Указанная цель достигается тем, что стабилизатор снабжен трансформа тором постоянного тока и источником тока, а в преобразователь введены третья и четвертая обмотка, причем первичная, первая, вторая и третья обмотки преобразователя намотаны на элементы.магнитной.системы преобразователя и на сердечники трансформатора постоянного тока, а четвертая - только на элементы.магнитной система преобразователя, первый выходной за жим преобра:зователя ток - магнитная индукция - ток подключен к выходу ; датчика тока и через последовательно соединенные эталонный резистор, первый цифровой переключатель, делитель . тока и четвертую обмотку преобразователя - ко второму выгодному зажиму указанного преобразователя, вакодные зажимы трансформатора постоянного тока соединены соответственно с выходными за жимами преобразователя, источник тока одним полюсом подсоединен к первому выходному.зажиму. преобразователя, а другим через третью обмотку преобразователя - к точке .Соединения четвертой обмотки преобразователя и делителя тока. На фиг. 1 представлена принципиальная электрическая схема стабили затора; на фггг. 2 - принципиальная схема одного из вариантов выполнения преобразователя ток - магнитная ин;дукция - ток; на фиг. 3 - эквивалент ная схема датчика тока стабилизатора представленного на фиг. 1. Стабилизатор содержит силовой регулятор 1, измерительно-усилительный блок 2, источник 3 опорного напряжения, датчик 4 тока, преобразователь 5 ток - магнитная индукция г ток, первую, вторую, третью и четвертую обмотки (б - 9) преобразователя 5, первичную обмотку 10 преобразователя 5, первый и. второй цифровой переключатели 11 и 12, делителе 13-toKa, эталонный резистор 14, трансформатор 15 постоянного тока (ТПТ), рабочие обмотки 16; и сердечники 17 транс форматора 15 постоянного тока, источ ник 18 тока, блок 19 программного управления, нагрузку 20 стабилизатора, первый.21 и второй 22 выходные зажимы преобразователя 5, вывод 23 четвертой обмотки, выводы 24 и 25 третьей обмотки, выводы 26 и 27 первичной обмотки, жгуты 28 и 29, выводов первой и второй обмоток, выходные зажимы 30 и 31 трансформатора постоянного тока; Вариант выполнения преобразователя ток - магнитная индукция - ток, i представленный на Фиг.2, кроме перечисленных выше его элементов, содержит также магнитный модулятор 32, модуляционные обмотки 33 и сердечники 34 магнитного модулятора 32, демодулятор 35 второй гармоники, усилитель 36 постоянного тока. На фиг. 3 трансформатор 15 постоянного тока представлен источником тока т и рабочей обмоткой Wp, активная часть преобразователя 5 - источником D,-источник 18 постоянного тока -Л{.цл, эталонный резистор 14 - А ькодное напряжение датчика 4 тока, ид Я и в цепи эталонного резистора, W.J., W,7,, Wjv и Wp - соответственно число витков первичной 10, третьей 8, четвертой 9 обмоток преобразователя 5 и рабочей .обмотки .ТПТ . 1 5, .W-r и W л число .включенных витков первой б и второй 7 обмоток преобразователя 5. Стабилизатор работает следующим образом. В статическом режиме через первичную обмотку 10 преобразователя 5 ток - магнитная индукция - ток протекает ток нагрузки Jj , который создает намагничивающую силу (и.с.) , действукадую на сердечники 17 ТПТ 15 и элементы магнитной- системы преобразователя 5. Условимся также, что ток Лс(уу, генерируемый источником 18 тока, протекая по третьей обмотке 8, создает н.с. W,-}-, , действукяцую на сердечники 17 и эл®«1енты магни.тной системы преобразователя 5 в том же направлении, в котором действует н..с. JH Wj, а, протекая по четвертой обмотке 9, создает н.с. ,, действующую только на элементы магнитной системы преобразователя 5, причем н.с. JCM Wjv направлена навстречу н.с. DcwWjTt Примем такисё, что в следящей системе преобразователя 5 используется способ выделения сигнала ошибки, обеспечивающий выполнение следующего условия для режима равновесного состояния преобразователя 5: now 0. Как следует из схемы стабилизатора по фиг. 1 и эквивалентной схемы датчика тока по фиг. 3 ток в цепи эталонного резистора 14 равен (в установившемся режиме) - 3 - U. + 3„ (2) Чтобы подчеркнуть отличия известного и предложенного технического решения укажем, что в известном устройстве ток в цепи эталонного резистора обеспечивается только за счет выходного тока vJf,) преобразователя (при разорванных цепях 3f ,:как очевидно из эквивалентнЪйсхемы Эy 3,), т.е. динамический диапазон преобраэователя по выходному току (Jf,) дол жен быть достаточно широким, что создает условия для появления в еле дящей системе преобразователя боль ших начальных рассогласований и свя занных с ними недостатков прототипа ; В предложенном техническом решении ток Jf, составляет часть тока 3 причем как будет показано при определенных условиях Jj является лишь малой долей Зр (порядка единиц процента). Для предложенного устройства в момент включения стабилизатора ток в цепи эталонного резистора.14 равен: З}, установившемся режиме значение Зр определяет ся соотношением (2), т.е. ввиду малости Лп значение Jj, незначительно отличается от значения 3 , Таким образом, предложенное техническое, решение гарантирует работу следя- щей системы преобразователя 5 при Цалом начальном рассогласовании, следствием чего является повышение надежности функционирования стабили затора при изменении величины сопро тивления нагрузки в ходе технологического процесса. Определим условия, при которых указанные преимущества предложенног технического решения достигаются. С учетом всех сделанных замечани можно записать для режима равновесного состояния преобразователя 5: )ЭД/с,.«ц/гг), откуда с учетом (2) и при условии Wjfi W|v получаем t Для ФПГ 15, исходя из закона полног тока (при разомкнутой цепи Зп f име ем . H - CM fr T%4 T-3cFvK r-Wj| откуда для идеального ТПТ при усло вии WP W|f, получаем () (Из соотношений (3) и (4) с учетом соотношения (2) и при условии Wp получаем V (; откуда следует, что при идеальном .ТПТ Зп 0. Из соотношения (5) при учете по решности ТПТ йолучаем ит.{1±еЛ)-Э.,(6) откуда Зп ±Лт , где (Л- ртносительная погрешность ТПТ, обычно значение сГ составляет 1-2%. Таким образом, подтверждается,, что величина Эр составляет малую олю от значения 3, и преобразователь 5 работает в режиме малых начальных рассогласований, причем это достигается при условии W,-, Vlp. Обсудим теперь функцию, вйНолняемую в стабилизаторе источником постоянного- 18 тока.. Как известно, для большинства используемых на практике схем .ТПТ пО лярность выходного тока не- зависит . от полярности тока в обмотках намагничивания . При переходно процессе в цепи нагрузки стабилизатора, содержащей реактивные элементы, направление тока Лп может изменяться на противоположное относительно стационарного режима. Однако направление тока DJ при этом не изменяется, это означает, чт.о намагничивающие .силы, создаваемые токами J t УДУ действовать в одинаковом направлении на сердечники 17 ТПТ 15. Такое сог- . ласное действие н.с. на указанные сердечники приводит к переходу рабочей точки ТПТ 15 на левую его характеристики и к замагничиванию-сердечников до насыщения, вследствие возникающей в этом случае положительной обратной связи, функциО нирование стабилизатора при этом нарушается. Ввёдениэ источника 19 тока и обмотки 8 преобразователя 5 позволяет установить рабочую точку ТПГ 15 на правей ветви его характеристики; выбором величины тока 3j. и числа витков обмотки 8 можно создать условия, исключающие переход рабочей точки на ле- : вую ветвь характеристики ТОТ 15 при переходном процессе (-0 Wj-f3j., где DHT - амплитудное значение отрицательной полуволны тока J в переходном процессе): Ток Эй , протекая по эталонному резистору 14, создает на нем падение напряжения ид, которое с учетом соотношения (3) -равно J 3 W R3-vKNWg Wj-VM5). (1) Это напряжение с выхода датчика 4 поступает на один из входов измёрИтельно-усилительного блока 2, на второй вход которого поступает опорное напряжение Uon от источника 3, При отклонении величины тока Зц от заданного значения ид j UQ,, и на выходе измерительно-усилительного блока 2 появляется управляющий сигнал, который поступает на вход силового регулятора 1. Под воздействием этого сигнала ток в цепи нагрузки изменя-. ется и его отклонение от заданного значения уменьшается до допустимой. малой величины. Это означает, что Уд Ugn с учетом (7) получаем V%n( Это соотношение показьшает, что ток в нагрузке 20 зависит от ряда параметров и в том числе от количества включенньох витков первой 6 и второй 7 обмоток преобразователя 5, а также от коэффициента деления п делите ля тока 13. Изменяя Wj и Wп с помощью цифровых переключателей 11 и 12, можно изменить Эц в определенных пределах. В заключение рассмотрим работу преобразователя 5, выполненного по схеме фиг. 2. Все общие замечания, относящиеся к этому преобразователю и приведенные выше, остаются справедливыми и для конкретного его вар анта (фиг. 2). Сердечники 34 являют ся элементами магнитной системы преобразователя 5. На модуляционные обмотки 33 подается напряжение пита ния частоты Р„. При наличии постоян ного подмагничивания сердечник.ов 33 на выходе магнитного модулятора 32 появляется напряжение удвоен-ной частоты 2 Fj, амплитуда и фаза которого зависят соответственно от величины и направления постоянного подмагничивания. Это напряжение поступает на вход демодулятора 35, на выходе которого в случае HJW и О появляет ся напряжение сигнала оишбки. Под действием напряжения сигнала ошибки выходной ток усилителя постоянногй тока 36, который для данной схемы является выходным током преобразователя Dfj , изменяется пока не будет достигнуто равновесие состояния, прео разователя 5, характеризующееся, как .уже отмечалось, условием El3W 0. Таким образом, и данный вариант преобразователя ток - магнитная инду ция - ток при включении его в стабилизатор обеспечивает преобразование тока в ток 0 согласно соотношения (3) со всеми последствиями, рассмотренными выше при общем анализе работы стабилизатора. Таким образом, изобретение позволяет повысить надежность работы стабилизатора. Формула изобретения 1. Стабилизатор постоянного регулируемого тока, содержащий силовой регулятор, соединенный через датчик тока с клеммами для подключения нагрузки, управляющий вход силового регулятора подключен к выходу измерительно-усилительного блока, входы которого соединены соответственно с источником опорного напряжения и выходом датчика тока, который выполнен в виде преобразователя ток - магнитная индукция - ток, включающего первичную обмотку, включенную последовательно с силовым регулятором, и две обмотки, каждая из которых состоит из отдельных секций с разным числом витков, двух цифровых переключателей, делителя тока и эталонного резистора, выход первого цифрового переключателя подключен к первой обмотке преобразователя ток - магнитная индукция,- ток, выход делителя тока соединен со входом второго цифрового переключателя, выход которого подключен ко второй обмотке преобразователя, а управляющие входы цифровых переключателей подключены к выходу блока программного управления,, отличающийс я тем, что, с целью повышения надежности функционирования стабилизатора при изменении величины сопротивления нагрузки в ходе технологического процесса, он снабжен трансформатором постоянного тока и источником тока, а в преобразователь введены третья и четвертая обмотки, причем первичная, первая, вторая и третья обмотки преобразователя намотаны на элементы магнитной системы преобразователя и на сердечники трансформатора постоянного тока, четвертая - только на элементы магнитной системы преобразователя, первый выходной зажим преобразователя ток - магнитная индукция - ток подклюЧ:ен к выходу датчика тока через последовательно соединенные эталонный резистор, первый цифровой переключатель, делитель тока и четвертую обмотку преобразователя - ко второму выходному зажиму указанного преобразователя, выходные зажимы трансформатора постоянного тока соединены соответственно с выходными зажимами преобразователя, источник тока одним полюсом подсоединен к первому вькодному зажиму преобразователя, а другим через третью обмотку преобразователя - к точке соединения четвертой обмотки преобразователя и делителя тока. 2. Стабилизатор по п. 1, отличающийся тем, что преобразователь ток - магнитная индукция - ток выполнен на основе магнитного модулятора с удвоением частоты, выход которого через демодулятор второй гармоники связан со входом усилителя постоянного тока, выходные выводы которого подсоединены к выдрдным зажимам преобразователя ток магнитная индукция - ток, причем сердечники магнитного модулятора являются магнитными элементами магнитной системы преобразователя ток - магнитная индукция - ток.
Источники информации, принятые во внимание при экспертизе
1.Brentbord Electric L 34/70 Highly stable De power supplies
ahd power electronics.
2.Авторское свидетельство СССР 760055,. кл. G 05 F 1/56, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизатор постоянного регулируемого тока (его варианты) | 1982 |
|
SU1057934A1 |
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
| Стабилизатор постоянного регулируемого тока | 1983 |
|
SU1112353A1 |
| Стабилизатор постоянного тока | 1984 |
|
SU1288665A1 |
| Система стабилизации постоянных регулируемых токов для питания N независимых нагрузок | 1987 |
|
SU1524032A1 |
| Стабилизатор постоянного тока | 1990 |
|
SU1711136A1 |
| Стабилизатор постоянного тока | 1987 |
|
SU1467545A2 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2019841C1 |
| Стабилизатор постоянного тока | 1984 |
|
SU1180862A1 |
| Преобразователь постоянного напряжения в постоянное | 1990 |
|
SU1764127A1 |
26
f(
