Изобретение относится к электрог технике, в частности к стабилизированным источникам тока.
Цель изобретения - повышение точности стабилизации токов.
На фиг. 1 приведена блок-схема системы стабилизации постоянных регулируемых токов для питания N независимых нагрузок; на фиг. 2 - блок- схема варианта вьтолнения измерительного преобразователя постоянного тока; на фиг. 3 - блок-схема варианта выполнения источника эталонного тока; на фиг. 4 - принципиальная схема цифровой управляемой проводимости .
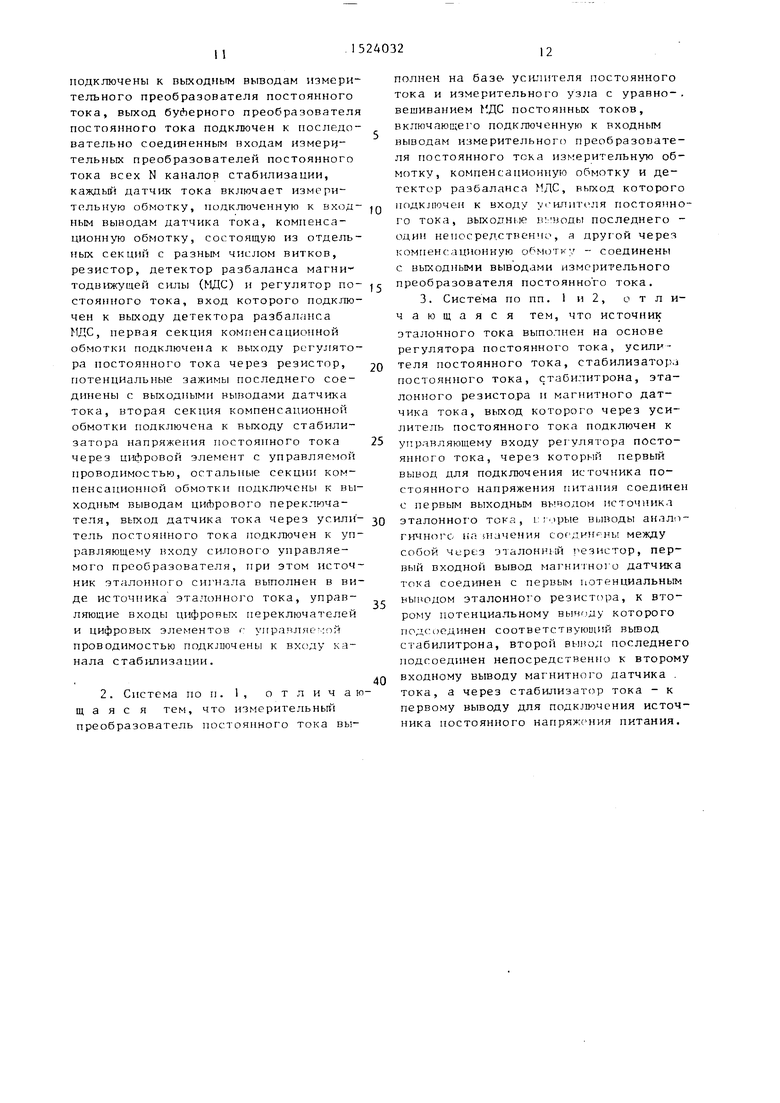
Автоматизированная система стабилизации постоянных регулируемых токо для питания N независимых нагрузок (фиг . 1.) содержит электронную вычислительную машину 1, блок 2 связи, блок 3 управления, блок 4 ручного набора команд и адреса, соединенный с соответствующим входом блока 3 управления, второй вход блока 3 управления соединен через блок 2 связи с электронной вычислительной машиной 1 , источник 5 эталонного сигнала, буферны преобразователь 6 постоянного тока, вход которого подключен к источнику эталонного сигнала, и стабилизатор 7 постоянного напряжения. Предлагаемая система содержит первый 8, второй 9 и N-й 10 каналы стабилизации.
Канал стабилизации включает силовой управляемый преобразователь 1I, датчик 12 тока, усилитель 13 постоянного тока, выход которого подключен к управляющему входу силового управляемого преобразователя 11, а вход - к выходу датчика 12 тока. В состав канала 8 входят также измерительный преобразователь 14 постоянного тока, ци})ровой переключатель 15 и цифровой элемент 16 с управляемой проводимостью. Управляющие входы цифрового переключателя 1 5 и цифрового элемента 16 с управляемой пpoвoд iмocтью подключены к выходу блока 3 управления.
Датчик 12 тока содержит измерительную обмотку 17, компенсационную обмотку 18, состоящую из отдельных секций с разным числом витков, детектор 19 разбаланса НДС, резистор 20, регулятор 21 постоянного тока, к выходу которого подключены соединенные последовательно резистор 20 и первая секция 22 компенсационной обмотки 18
0
5
0
5
0
5
0
5
0
5
Потенциальные зажимы резистора 20 подключены к выходным выводам датчика 12 тока. Вход регулятора 21 постоянного тока подключен к выходу детектора 19 разбаланса МДС. Вторая секция 23 компенсационной обмотки 18 подключена через циЛровой элемент I6 с управляемой проводимостью к выходу стабилизатора 7 постоянного напряжения. Остальные секции компенсационной обмотки 18 подключены к выходам пифровог о переключателя 15.
Нагрузка 24 первого канала 8 стабилизации подключена к его клеммам 25 и 26, нагрузка 27 второго канала 9 - к его клеммам 28 и 29, а нагрузка 30 N-ro канала 1 О - к его клеммам 31 и 32. На фиг.1 обозначены выходные зажимы 33 и 34 источника эталонного сигнала, выходные зажимы 35 и 36 измерительного преобразователя 14 (используемого в первом канале 8 стабилизации) , входные зажимы 37 и 38 преобразователя 14, входные зажимы 39-42 измерительнЬ1х преобразователей второго 9 и N-ro 10 каналов стабилизации, зажимы 43 и 44 цифрового элемента 16 с управляемой проводимостью, используемой в первом канале 8 стабилизации. Первы; : канал 8 стабилизации подключается к выходу стабилизатора постоянного напряжения через зажимы 45 и 46, Соответственно второй 9 и N-й I О каналы стабилизации - через зажимы 47, 48 и 49, 50.
Блок 3 управления связан с соответствующими узлами первого 8, второго 9 и N-ro 10 каналов стабилизации через жгуты 51 - 53 соответственно .
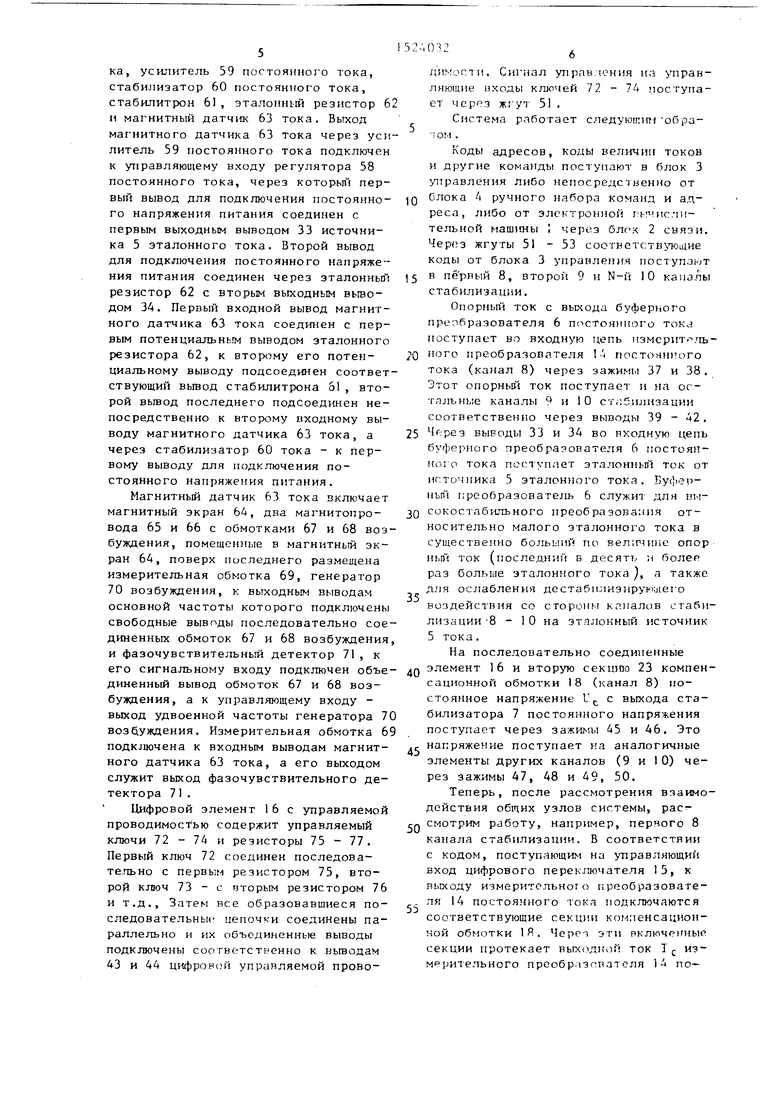
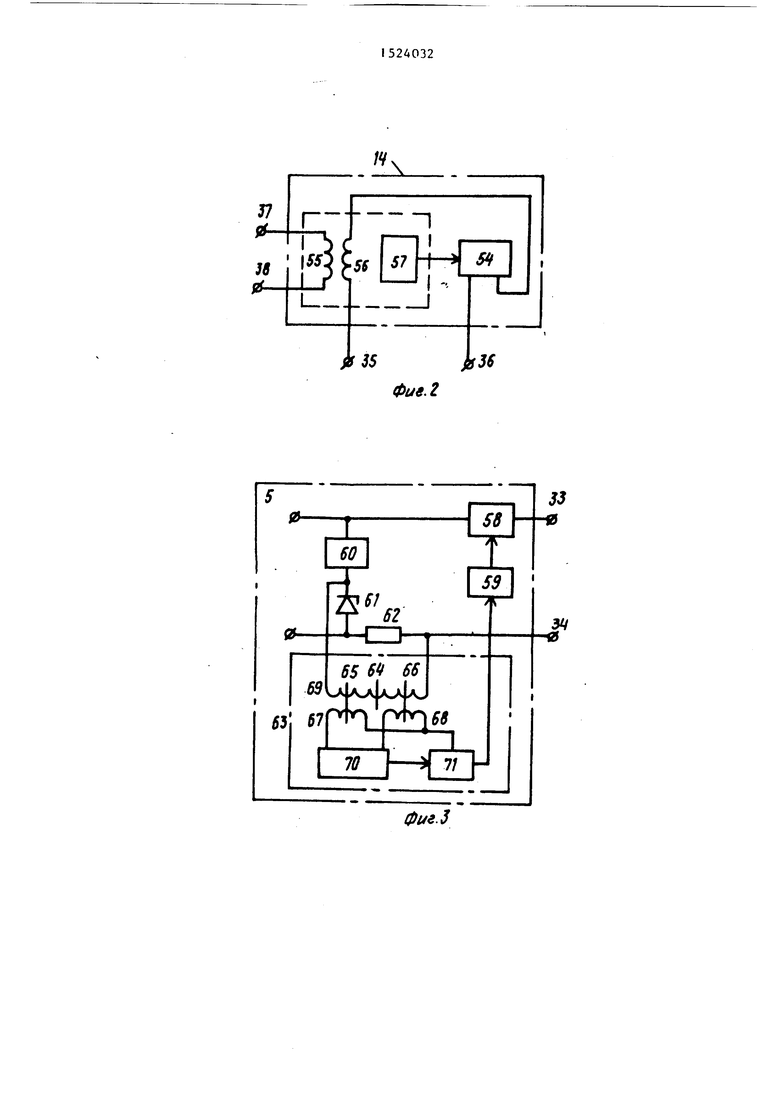
Измерительный преобразователь 14 постоянного тока (фиг.2; содержит усилитель 54 постоянного ток а и измерительный узел с уравновешиванием МДС постоянных токов, включающий измерительную 55 и компенсационную 56 обмотки, а также детектор 57 разбаланса МДС. Выход детектора 57 разбаланса ЬЩС подключен к входу усилителя 54 постоянного тока, выходные выводы последнего соединены с выходными зажимами 35 и 36 один непосредственно, а другой - через компенсационную обмотку 56. Измерительная- обмотка 55 подключена к входньм зажимам 37 и 38.
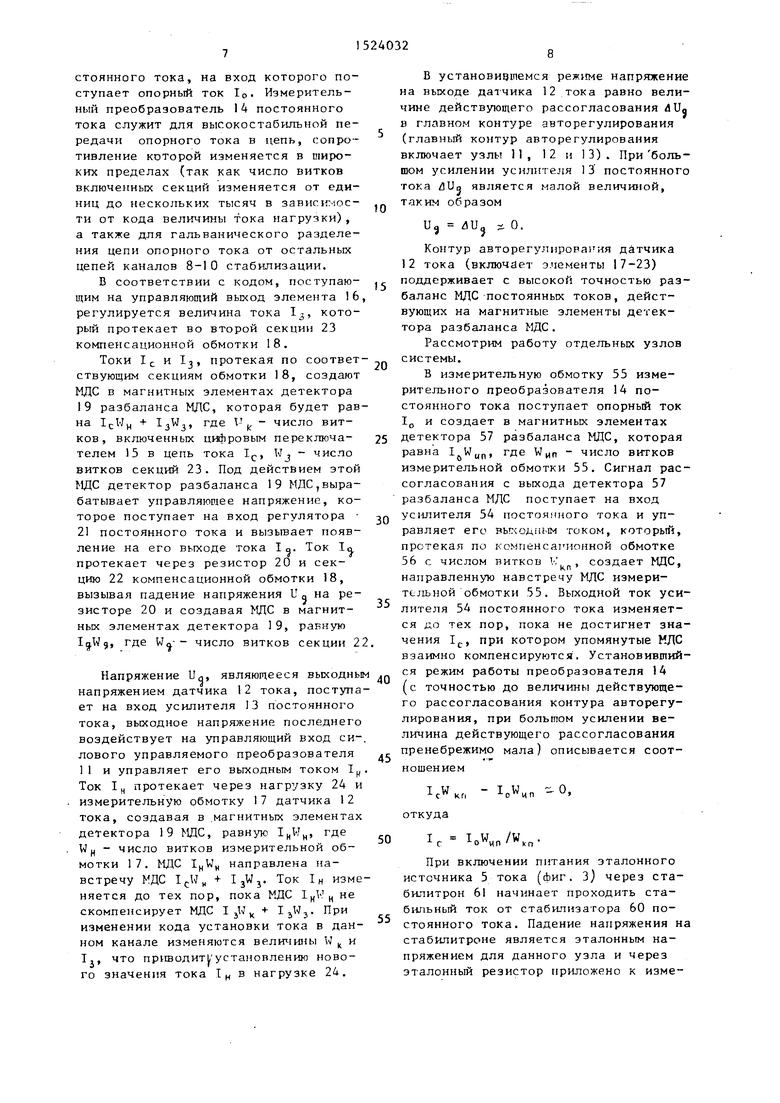
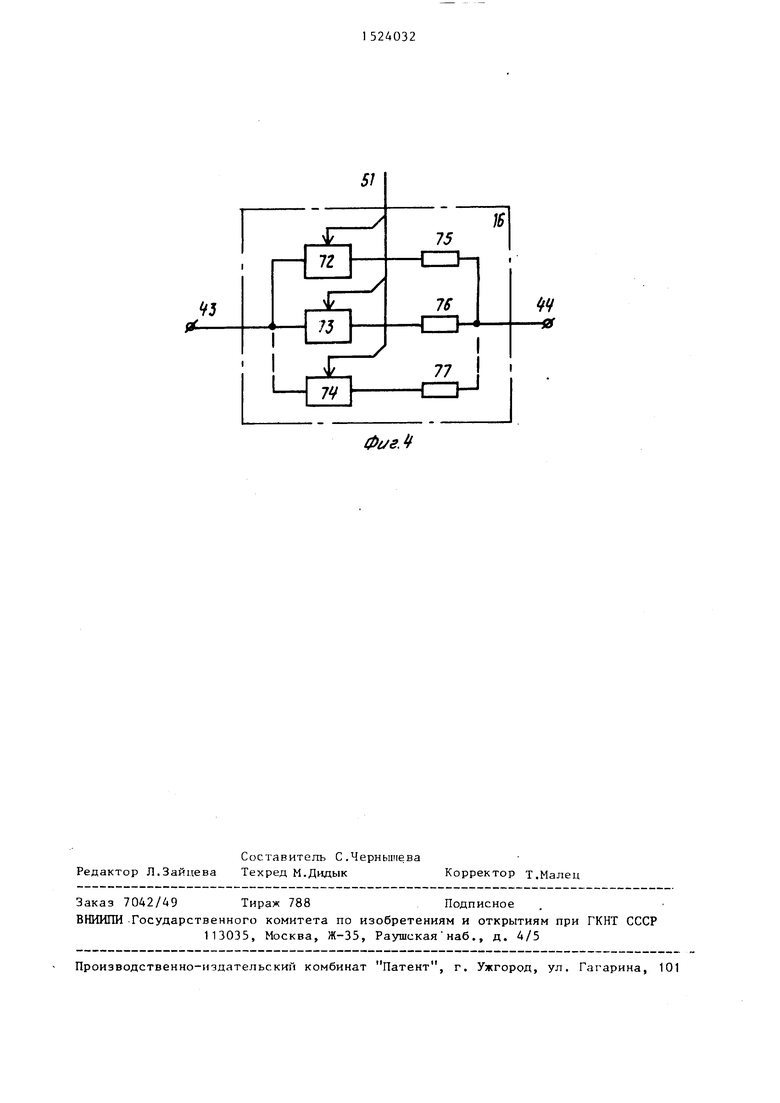
Источник эталонного тока 5 (Лиг.З)- содержит регулятор 58 постоянного тока, усилитель 59 постоянного тока, стабилизатор 60 постоянного тока, стабилитрон 61, эталонный резистор 62 и магнитный датчик 63 тока. Выход магнитного датчика 63 тока через усилитель 59 постоянного тока подключен к управляющему входу регулятора 58 постоянного тока, через которьй первый вывод для подключения ПОСТОЯ} НОго напряжения питания соединен с первым выходным выводом 33 источника 5 эталонного тока. Второй вывод для подключения постоянного напряжения питания соединен через эталонный резистор 62 с вторым выходным вьшо- дом 34. Первый входной вывод магнитного датчика 63 тока соединен с первым потенциальным выводом эталонного резистора 62, к второму его потенциальному выводу подсоединен соответствующий вьгаод стабилитрона 61 , второй вьшод последнего подсоед1шен непосредственно к второму входному выводу магнитного датчика 63 тока, а через стабилизатор 60 тока - к первому выводу для подключения постоянного напряжения питания.
Магнитный датчик 63 тока включает магнитный экран 64, два магнитопро- вода 65 и 66 с обмотками 67 и 68 возбуждения, помещеннь е в магнитный экран 64, поверх последнего размещена измерительная обмотка 69, генератор 70 возбуждения, к выходным выводам основной частоты которого подключены свободные выводы последовательно соединенных обмоток 67 и 68 возбуждения и фазочувствительный детектор 71 , к его сигнальному входу подключен объединенный вывод обмоток 67 и 68 возбуждения, а к управляющему входу - выход удвоенной частоты генератора 70 возбуждения. Измерительная обмотка 69 подключена к входным выводам магнитного датчика 63 тока, а его выходом служит выход фазочувствительного детектора 7 1 .
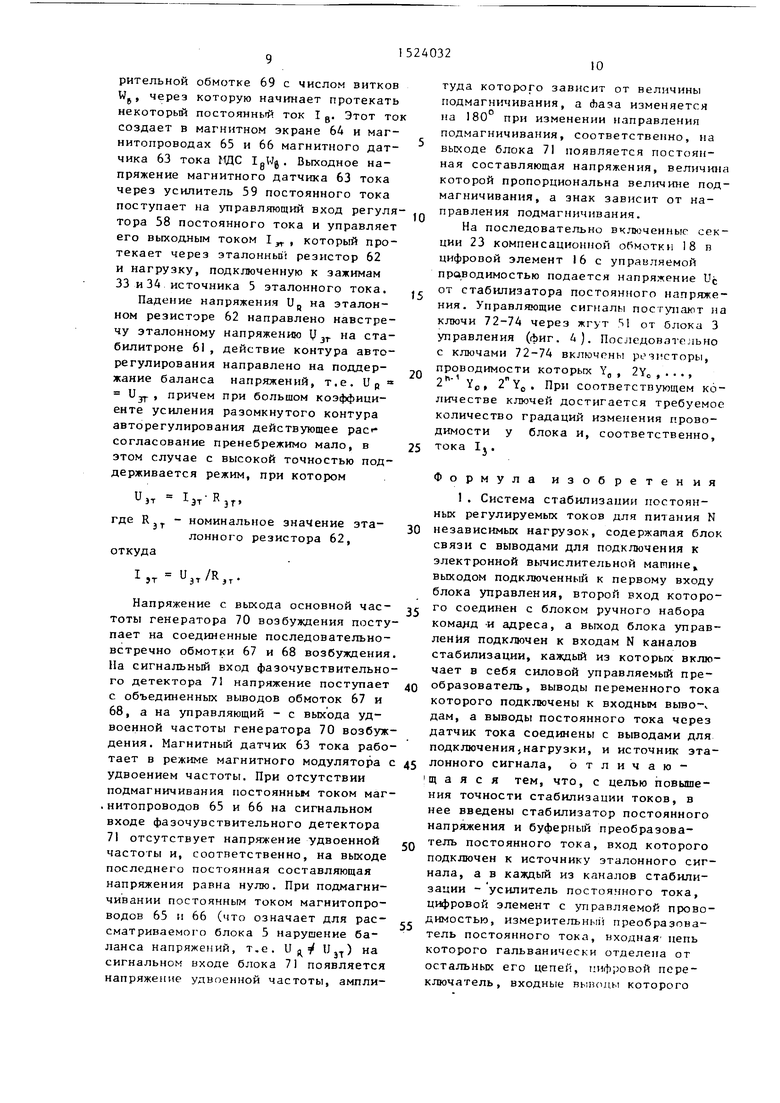
Цифровой элемент 16 с управляемой проводимостью содержит управляемый ключи 72 - 74 и резисторы 75 - 77. Первый ключ 72 соединен последова- те.пьно с первым резистором 75, второй ключ 73 - с пторым резистором 76 и т.д.. Затем все образовавшиеся последовательные цепочки соединены параллельно и их объединеннь1е выводы подключены соответственно к выводам 43 и 44 цифровой управляемой прово
0
5
0
5
0
5
0
5
димогли. Сигнал управления на управляющие оходы ключей 72 - 74 поступает через жгут 51.
Система работает следуюшш обра- ;ом .
Коды адресов, коды величии токов и другие команды поступают в блок 3 1травления либо непосредс 1 венно от блока 4 ручного набора команд и адреса, либо от электронной , 1и- тельной машины 1 через блок 2 связи. Через жгуты 51 - 53 соответств 101дие коды от блока 3 управления поступают в пё рпый 8, второй 9 и N-й 10 каналы стабилизации.
Опорньш ток с выхода буферного преобразователя 6 п(- стоя)1ного тока поступает во входную цепь лзмсрит.- ль- ного преобразователя 14 постоянжтго тока (канал 8) через зажимы 37 и 38. Этот опорный ток поступает и на ос- талънь е каналы 9 и 10 ст;;511лизации соотнетственно через выводы 39 -42. Через выводы 33 и 34 во входную цепь буферного преобразователя 6 постоян- псл о тока поступает эталонньп ток от ис .точцика 5 эталонного тока. Буфеп- иьп1 гфеобразователь 6 служит для пы- сокостабильного преобразования относительно малого эталонного тока в существенно больыий по Beniruine опор HiiOi ток (последний в десять ;i более раз больше эталонного тока ), а также для ослабления дестабилизирующего воздействия со сторонк.г каналов стабилизации -8-10 на эталонный источник 5 тока.
На последовательно соединенные элемент 16 и вторую секцюо 23 компенсационной обмотки 18 (канал 8) постоянное напряжение L выхода стабилизатора 7 постоянного напряжения поступает через 45 и 46, Это напряжение поступает I a аналогичные элементы других каналов (9 и 10) через зажимы 47, 48 и 49, 50.
Теперь, после рассмотрения взаимодействия общих узлов системы, рассмотрим работу, например, первого 8 капала стабилизации. В соответствии с кодом, поступающим на управляющий вход цифрового переключателя 15, к выходу измерительного преобразователя 14 постоянного тока подключаются соответствующие секции компенсационной обмотки 1Я. Черет эти включе1гные секции протекает ток 1 измерительного преобразователя 14 по-
стоянного тока, на вход которого поступает опорный ток TO. Измерительный преобразователь I4 постоянного тока служит для высокостабильной передачи опорного тока в цепь, сопротивление которой изменяется в ширю- ких пределах (так как число витков включенных секций изменяется от единиц до нескольких тысяч в завис1Г-юс- ти от кода величины тока нагрузки), а также для гальванического разделения цепи опорного тока от остальных цепей каналов 8-1 О стабилизации.
В соответствии с кодом, поступаю- щим на управляющий выход элемента 16 регулируется величина тока 1.5 который протекает во второй секции 23 компенсационной обмотки 18.
Токи I ( и 1, протекая по соответ ствующим секциям обмотки 18, создают НДС в магнитных элементах детектора 19 разбаланса НДС, которая будет равна IcW + к витков, включенных цифровым переключа- телам 15 в цепь тока 1,, Wj - число витков секций 23. Под действием этой оде детектор разбаланса 19 МДС,вырабатывает управляющее напряжение, которое поступает на вход регулятора 21 постоянного тока и вызьшает появление на его выходе тока IQ. Ток IQ, протекает через резистор 20 и секцию 22 компенсационной обмотки 18, вызывая падение напряжения U Q на резисторе 20 и создавая МДС в магнитных элементах детектора 19, равную , где число витков секции 2
Напряжение и, являющееся выходны напряжением датчика 12 тока, поступает на вход усилителя 13 постоянного тока, выходное напряжение последнего воздействует на управляющий вход силового управляемого преобразователя 11 и управляет его выходным током 1 Ток 1ц протекает через нагрузку 24 и измерительную обмотку 17 датчика 12 тока, создавая в магнитных элементах детектора 19 ЩC, равную , где W j - число витков измерительной обмотки 17. МДС направлена навстречу МДС + 3 Г - изменяется до тех пор, пока МДС н скомпенсирует МДС I jW IjWj. При изменении кода установки тока в данном канале изменяются величины W и 1,, что пр1шодит1 установлению нового значения тока IK в нагрузке 24.
o
Q 5 о
Q д
В установившемся режиме напряжение на выходе датчика 12 тока равно величине действующего рассогласования AVq в главном контуре авторегулирования (главный контур авторегулирования включает узлы 11, 12 и 13). При большом усилении усилителя 13 постоянного тока является малой величиной, таким образом
Ug AVa 0.
Контур авторегулирования датчика 12 тока (включает элементы 17-23) поддерживает с высокой точностью разбаланс МДС постоянных токов, действующих на магнитные элементы детектора разбаланса МДС.
Рассмотрим работу отдельных узлов системы.
В измерительную обмотку 55 измерительного преобразователя 14 постоянного тока поступает опорный ток IP и создает в магнитных элементах детектора 57 разбаланса МДС, которая равна , где W,n - число витков измерительной обмотки 55. Сигнал рассогласования с выхода детектора 57 разбаланса МДС поступает на вход усилителя 54 постоянного тока и управляет его вькодним током, которьш, протекая по компенсапионной обмотке 56 с числом витков V. , создает МДС, направленную навстречу МДС измерительной обмотки 55. Выходной ток усилителя 54 постоянного тока изменяется до тех пор, пока не достигнет значения 1, при котором упомянутые МДС взаимно компенсируются. Установившийся режим работы преобразователя 14 (с точностью до величины действующего рассогласования контура авторегулирования, при большом усилении величина действующего рассогласования пренебрежимо мала) описывается соотношением
, - -о, откуда
I с
При включении питания эталонного источника 5 тока (фиг. 3) через стабилитрон 61 начинает проходить ста- бильньй ток от стабилизатора 60 постоянного тока. Падение напряжения на стабилитроне является эталонным напряжением для данного узла и через эталонный резистор приложено к измерительной обмотке 69 с числом витков Wj, через которую начинает протекать некоторый постоянный ток I ц. Этот то создает в магнитном экране 64 и маг- нитопроводах 65 и 66 магнитного датчика 63 тока НДС IgWj. Выходное напряжение магнитного датчика 63 тока через усилитель 59 постоянного тока поступает на управляющий вход регулятора 58 постоянного тока и управляет его вьгходным током 1 , который протекает через эталонны резистор 62 и нагрузку, подключенную к зажимам 33 и 34 источника 5 эталонного тока. Падение напряжения U на эталонном резисторе 62 направлено навстречу эталонному напряжению Ujr стабилитроне 61, действие контура авторегулирования направлено на поддержание баланса напряжений, т.е. Up и , причем при большом коэффициенте усиления разомкнутого контура авторегулирования действующее рас согласование пренебрежимо мало, в этом случае с высокой точностью поддерживается режим, при котором
и
Эт
где R
ЭТ
Эт
- номинальное значение эталонного резистора 62,
откуда
Ьт .
Напряжение с выхода основной частоты генератора 70 возбуждения поступает на соединенные последовательно- встречно обмотки 67 и 68 возбуждения. На сигнальный вход фазочувствительно- го детектора 71 напряжение поступает с объединенных выводов обмоток 67 и 68, а на управляющий - с выхода удвоенной частоты генератора 70 возбуждения. Магнитный датчик 63 тока работает в режиме магнитного модулятора с удвоением частоты. При отсутствии подмагничивания постоянньм током маг- .нитопроводов 65 и 66 на сигнальном входе фазочувствительного детектора 71 отсутствует напряжение удвоенной частоты и, соответственно, на выходе последнего постоянная составляющая напряжения равна нулю. При подмагни- чивании постоянным током магиитопро- водов 65 66 (что означает для рас- сматриваемог о блока 5 нарушение баланса напряжений, т.е. U ц У ) сигнальном входе блока 71 появляется напряжение удвоенной частоты, ампли0
5
0
5
0
5
0
5
0
5
туда которого зависит от величины подмагничивания, а Лаза изменяется на 180 при изменении направления подмагничивания, соответственно, на выходе блока 71 появляется постоянная составляющая напряжения, величина которой пропорциональна величине подмагничивания, а знак зависит от направления подмагничивания.
На последовательно включенные секции 23 компенсационной обмотки 18 п цифровой элемент 16 с управляемой приводимостью подается напряжение Uj от стабилизатора постоянного напряжения. Управляющие сигналы поступают ia ключи 72-74 через жгут S1 от блока 3 управления (фиг. 4). Последовательно с ключами 72-74 включены резисторы, проводимости которых Y, , 2Yo , , YO, 2 YO . При соответствующем количестве ключей достигается требуемое количество градаций изменения проводимости у блока и, соответственно, тока Ij.
Формула изобретения
1. Система стабилизации постоянных регулируемых токов для питания N независимых нагрузок, содержащая блок связи с выводами для подключения к электронной вычислительной матине,, выходом подключенный к первому входу блока управления, второй вход которого соединен с блоком ручного набора команд -и адреса, а выход блока управления подключен к входам N каналов стабилизации, каждый из которых включает в себя силовой управляемый преобразователь, выводы переменного тока которого подключены к входным выво-i дам, а выводы постоянного тока через датчик тока соединены с выводами для подключения.нагрузки, и источник эталонного сигнала, отличаю- |щ а я с я тем, что, с целью повьппе- ния точности стабилизации токов, в нее введены стабилизатор постоянного напряжения и буферный преобразователь постоянного тока, вход которого подключен к источнику эталонного сигнала, а в каждый из каналов стабилизации - усилитель постоянного тока, цифровой элемент с управляемой проводимостью, измерительный преобразователь постоянного тока, входная цепь которого гальванически отделена от остальных его цепей, Ифровой переключатель, входные вьикчлы которого
подключены к выходным выводам измерительного преобразователя постоянного тока, выход буАерного преобразователя постоянного тока подключен к последовательно соединенным входам измерительных преобразователей постоянного тока всех N каналов стабилизации, каждьй датчик тока включает измерительную обмотку, подключенную к вход- ным выводам датчика тока, компенсационную обмотку, состоящую из отдельных секций с разным числом витков, резистор, детектор разбаланса магни тодвижущей силы (ВДС) и регулятор по- стоянного тока, вход которого подключен к выходу детектора разбаланса МДС, первая секция компенсационной обмотки подключена к выходу регулятора постоянного тока через резистор, потенциальные зажимы последнего соединены с выходными выводами датчика тока, вторая секция компенсационной обмотки подключена к выходу стабилизатора напряжения постоянного тока через цифровой элемент с управляемой цроводимостью, остальные секции компенсационной обмотки подключены к выходным выводам цифрового переключателя, выход датчика тока через усили - тель постоянного тока подключен к управляющему входу силового управляемого преобразователя, при этом источник эталонного сигнала выполнен в виде источника эталонного тока, управляющие входы цифровьк переключателей и цифровых элементов г; упра ляе-:ой проводимостью подключены к входу канала стабилизации.
2. Система по п. 1 , отличающаяся тем, что измерительный преобразователь постоянного тока выQ0 5 0
5
0
полней на базе- усилителя постоянного тока и измерительного узла с уравно- . вешиванием Г.ДС постоянных токов, включающего подключенную к входным выводам измерительног(5 преобразователя постоянного тока из ;epитeльнyю обмотку, компенсационную обмотку и детектор разбаланса МДС, выход которого подключен к входу усилителя постоянного тока, выходные иь ноды последнего - один непосредственно, а друг ой через компенсационную обмотку - соединены с выходными выводами измерительного преобразователя постоянного тока.
3. Система по пп. 1 и 2, о т л и- чающаяся тем, что источник эталонного тока выполнен на основе регулятора постоянного тока, усилителя постоянного тока, стабилизатора постоянного тока, стабилитрона, эталонного резистора и магнитного датчика тока, выход которого через усилитель постоянного тока подключен к управляющему входу рег улятора постоянного тока, через который первый вывод для подключения источника постоянного напряжения питания соед1шен с первым выходным вьизодом источника эталонного тока, анал: - гично1 о на (начения СОСДИНРНЫ между собой через эпалонный резистор, первый входной вывод магнитного датчика тока соединен с первым потенциальным выводом эталонного резистора, к второму гютенциальному вынг1ду которого подсоединен соответствуюи й вьшод стабилитрона, второй выио;1 последнего подсоединен непосредственно к второму входному выводу магнитного датчика . тока, а через стабилизат(1р тока - к первому выводу для подключения источника постоянного напряж(Ч1ия питания.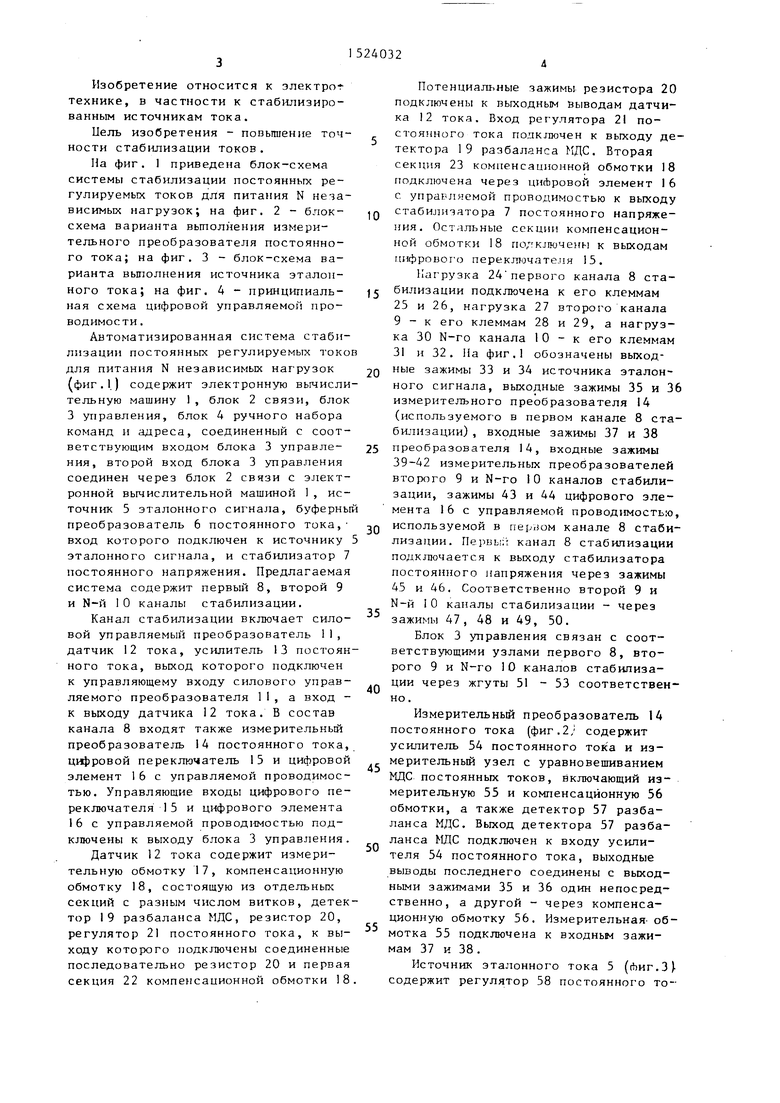
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
| СТАБИЛИЗАТОР ПОСТОЯННОГО РЕГУЛИРУЕМОГО ТОКА | 1991 |
|
RU2010304C1 |
| Стабилизатор постоянного регулируемого тока | 1983 |
|
SU1112353A1 |
| Стабилизатор постоянного тока | 1984 |
|
SU1180862A1 |
| Стабилизатор постоянного тока | 1990 |
|
SU1711136A1 |
| СТАБИЛИЗАТОР ПОСТОЯННОГО РЕГУЛИРУЕМОГО ТОКА | 1991 |
|
RU2010305C1 |
| Измерительный преобразователь постоянного тока | 1982 |
|
SU1150566A1 |
| Стабилизатор постоянного регулируемого тока (его варианты) | 1982 |
|
SU1057934A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2019841C1 |
| Измерительный преобразователь постоянного тока | 1984 |
|
SU1182422A1 |
Изобретение относится к вторичным источникам питания магнитных систем физических установок. Целью изобретения является повышение точности стабилизации токов. Это достигается введением в схему стабилизатора 7 постоянного напряжения, N цифровых переключателей 15, N цифровых элементов 16 с управляемой проводимостью, N усилителей постоянного тока и буферного преобразователя 14 постоянного тока. В качестве эталона в устройстве используется стабильный постоянный ток, который создает опорные м.д.с., сравниваемые с м.д.с., создаваемыми токами нагрузок. Нестабильность всей системы зависит только от одного резистора в источнике эталонного тока. Влияние нестабильности других резисторов на погрешность системы ослабляется на несколько порядков за счет введения указанных элементов и образованных ими связей. 2 з.п. ф-лы, 4 ил.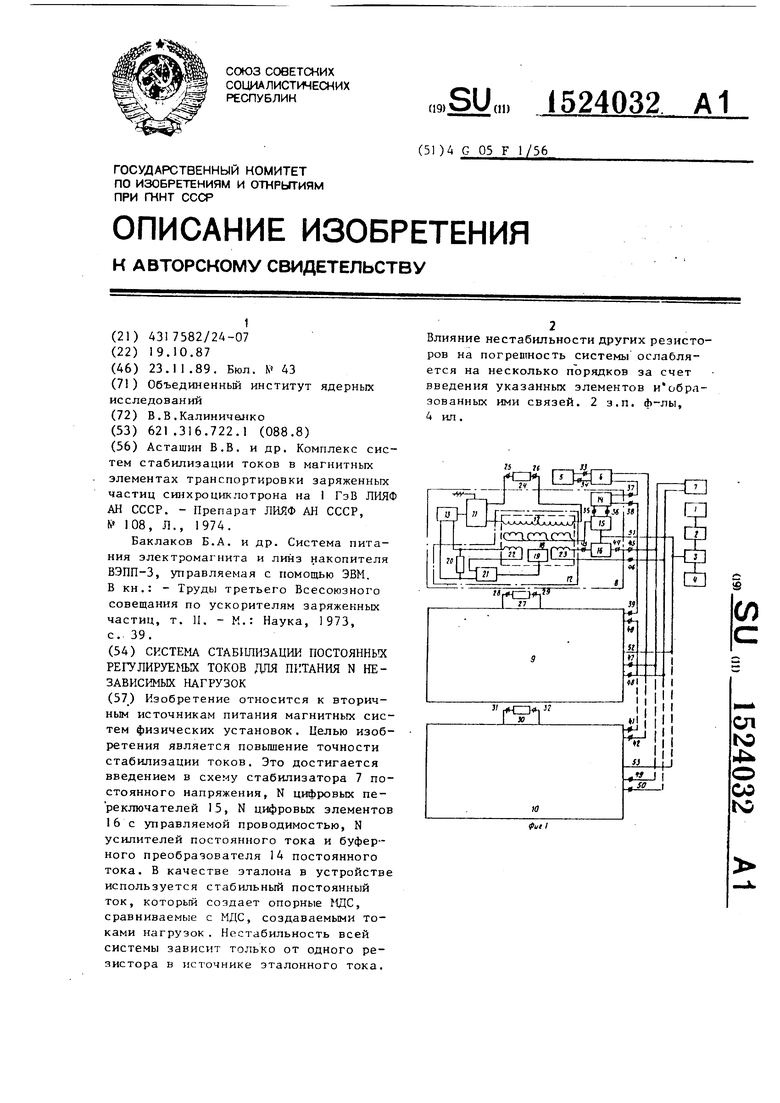
Фи8.2
фиг.5
.
| Асташин В.В | |||
| и др | |||
| Комплекс систем стабилизации токов в магнитных элементах транспортировки заряженных частиц синхроциклотрона на I ГэВ ЛИЯФ АН СССР | |||
| - Препарат ЛИЯФ АН СССР, Р 108, Л., 1974 | |||
| Бакланов Б.А | |||
| и др | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| В кн.: - Труды третьего Всесоюзного совещания по ускорителям заряженных частиц, т | |||
| П | |||
| - М.: Наука, 1973, с. | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
