Изобретение относится к телемехагт вике и предназначено для автоматиза-ции управления рассредоточенньами объектами.
Известны телемеханические устройства для автоматизации управления рассредоточенными объектами контроля и управления, состоящие из диспетчерского пункта и контролируемого пункта,Содержащих распределитель, дешифратор, линейный блок, блок развязки, элементы И, индикаторы, генератор, синхронизатор, блок памяти, датчики телесигнализации 1.
Наиболее близкой к предлагаемой по технической сущности является система телемеханики, содержащая на полукомплекте диспетчерского пункта первый регистр памяти, первый выход которого подключен к первому входу формирователя полярности сигнала, выход которого соединен с первым входом блока развязки, блок питания, выход которого соединен с первым входом блока ввода команд, первый выход которого подключен к второму входу первого регистра памяти, второй выход - к первому входу индикатора, к второму входу которого подключен вторбй выход первого регистра
памяти, третий и четвертый выходы которого соединены соответственно с вторым входом блока развязки и первым входом линейного блока, выход . которого соединен с :входом.блока аварийной телесигнализации,.генератор тактовых импульсов, первый и второй выходы jcoToporo подключены со1ответ ственнр к второму входу формиро10вателя полярности сигнала и к входу формирователя синхроимпульсов, первый выход которого через инвертор соединен с третьим входом формирователя полярности сигнала, второй выход
15 формирователя синхросигнала соединен с входом программно-временного блока, выход которого соединен с выходом диспетчерского пункта, блок ввода адреса, выход которого соединен с
20 BTOpbw цходам регистра памяти, формирователь сигналов телеуправления, выход которого соединен с входом переключателя, вход-выход программновременного блок:а подключен к первому
25 входу-выходу переключателя, второй вход-выход которого соединен с первым входом-выходом блока развязки, . второй вход-выход которого Соединен с входом-выходсял линейного Яблока,
30 .входы-выходы которого соответственно
подключены через основные линии связи к входам-вьоходам линейных блоков контролируемых пунктов 2.
Недостатками этих устройств является-то, что при автоматизации управления объектами коэффициент использования устройства не превышает 0,30,5, а следовательно, их низкая информативкость. Это связано с тем, ,что на 30 км линии связи допускается подключать 32 КП, а ирригационные каналы на 30 км длины имеют 10-15 объектов контроля и управления,
Целью изобретения является повышение информационной емкости и сокращение суммарной длины линии связи
Поставленная цель достигается тем, что в комплексный диспетчерский пункт, содержащий первый регистр памяти, первый выход которого подключен к первому входу формирователя полярности сигнала, выход которого соединен с первым входом блока развязки, блок питания, выход которого соединен с первым входом блока ввода команд, первый выход которого подключен к второму входу.первого регистра памяти, второй выход - к первому входу индикатора, к второму входу которого подключен второй выход первого регистра памяти, третий и четвертый выходы которого соединены соответственно с вторым входом блока развязки и первым входом линейног;о блока, выход которого соединен с входом блока аварийной телесигнализа ции, генератор тактовых импульсов, первый и второй выходы которого подключены соответственно к второму, входу формирователя полярности сигнала и к входу формирователя синхроимпульсов, первый выход которого через инвертор соединен с третьим входом формирователя полярности сигнала, второй выход формирователя синхросигнала соединен с входом программновременного блока, выход которого соединен с выходом диспетчерского пункта, блока ввода адреса, выход которого соединен с вторым входом регистра; памяти, формирователь сигналов телеуправления, выход которого соединен с входом переключателя, выход-вход программно-временного блока подключен к первому входу-выходу переключателя, второй вход-выход которого соединен с первым входом-выходом блока развязки, второй входвыход которого соединен с входом-выходом линейного блока входы-выходы которого соответственно подключены через основные линии связи к входам выходам линейных блоков контролируемых пунктов, введены второй регистр памяти, блок сравнения и .блок ключей выход которого соединен с входом генратора тактовых импульсов, первый
и второй выходы блока сравнения сое динены соответственно с третьим : входом индикатора и первым входом . блока ключей, к второму входу которого подключен третий выход блока ввода команд, пятый выход первого регистра памяти соединен с первым входом блока сравнения, к второму входу которого подключен выход формиро вателя сигналов телеуправления, вход-выход блока сравнения соединен с входом-выходом второго регистра памяти, в систему также введены коммутаторы, казкдый из которых содержит блок вызова, распределитель сигнаолов, блок аварийной телесигнализации блок сигналов телеуправления и блок ключей, вход-выход блока сигналов телеуправления подключен к первому входу распределителя импульсов, к второму входу которого подключен выход блока.аварийной телесигнализации вход-выход распределителя сигналов подключен к входу-выходу блока вызова входы-выходы которого соединены соответственно через дополнительные линии связи с основными линиями связи и с входами блока ключей коммутатора, выходы которого соединены соответственно-с входами-выходами линейньох блоков контролируемых пунктов.
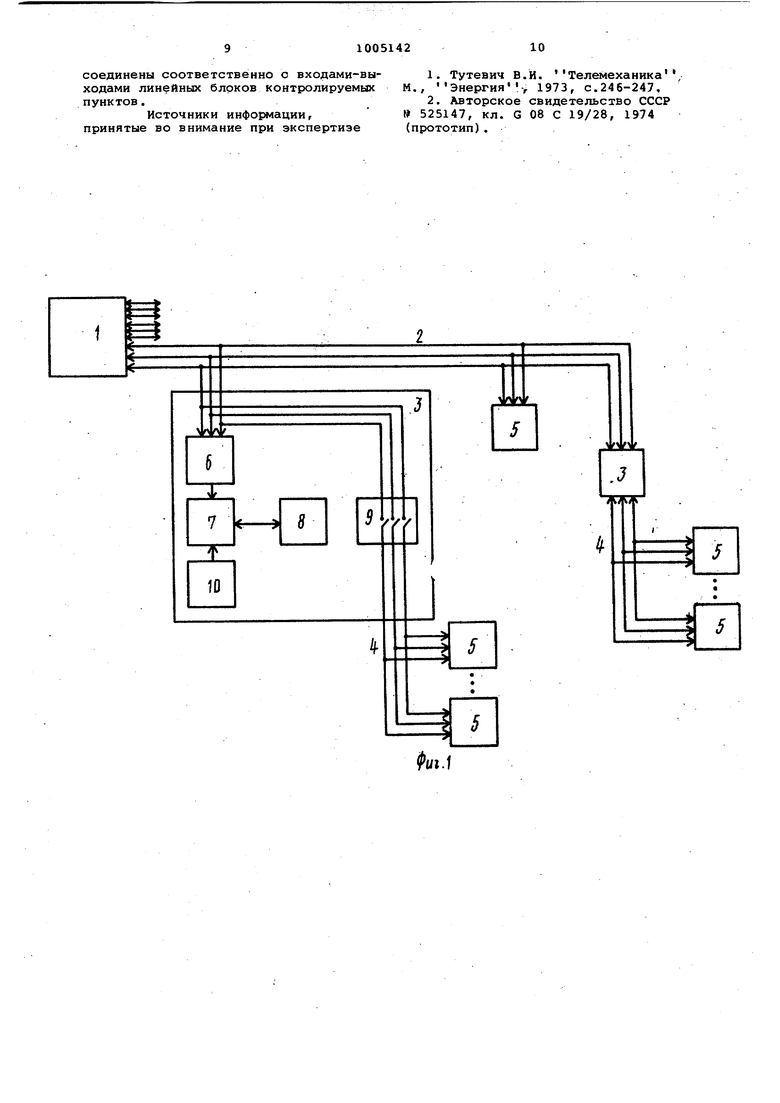
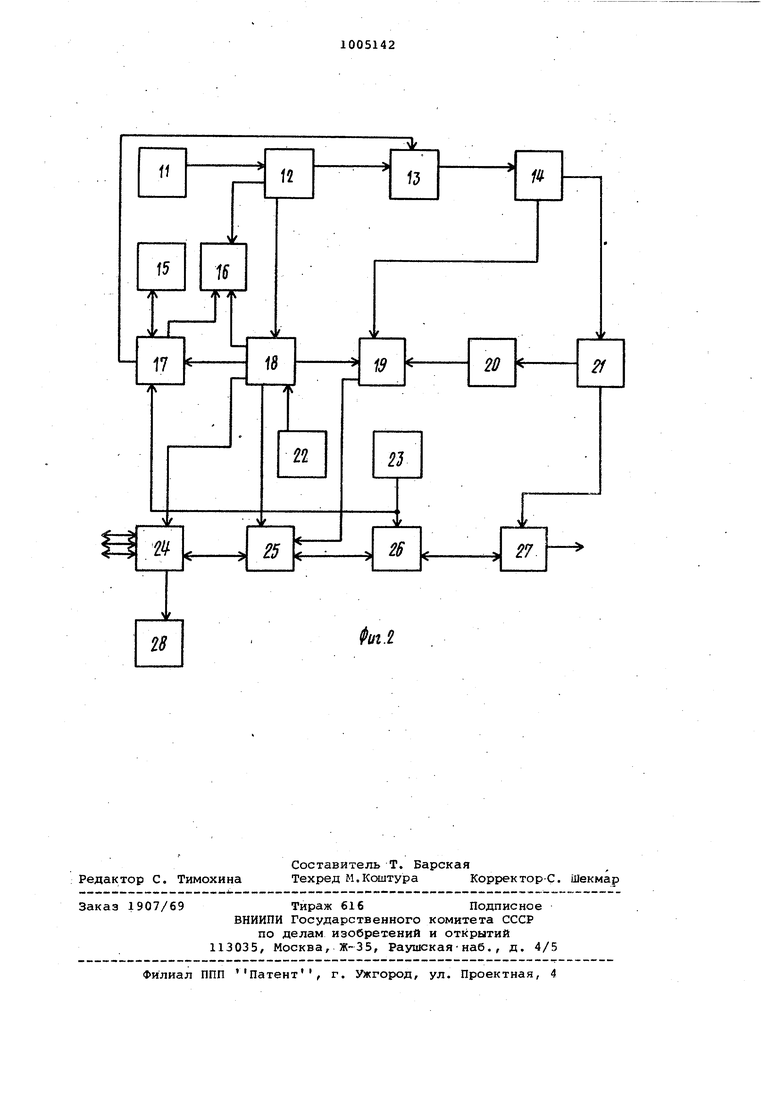
На фиг. 1-изображена блок-схема предлагаемой телемехакической системы; на фиг. 2 - блок-схема диспетчерского пункта.
Телемеханическая система; содержит диспетчерский пункт 1, основное направление линии связи 2, комг утатор 3, дополнительные линии связи 4, контролируемые пункты (КП) 5; коммутатор содержит блок 6 вызова, распределитель 7 сигналов, блок 8 сигналов телеуправления, блок 9 ключей, блок 10 аварийной телесигнализации.
В полукомплект диспетчерского пунк.та входят блок 11 питания, блок 12 ввода команд, блок 13 ключей, генератор 14 тактовых импульсов, второй регистр 15 памяти, индикатор 16, блок 17 сравнения, первый регистр 18 памяти, формирователь 19 полярности сигнала, инвертор 20, формирователь 21 синхроимпульсов, блок 22 ввода адреса, формирователь 23 сигналов телеуправления, линейный блок 24, блок 25 развязки, переключатель 26, программно-временной блок 27, блок 28 аварийной телесигнализации.
Система работает следующим образом
В исходном состоя«ии все ответвления линий связи отключены от главного направления с помощью нормально открытых контактов реле блока 9 коммутатора 3.
Управление системой осуществляется полностью.с помощью блоков 12 и 13. Блок 13 в исходном состоянии закрыт. Блок 11 питания включается соответствующим тумблером блока 12 и вырабатывает множество постоянных и переменных напряжений для питания всех составных элементов системы. При необходимости вызова КП 5, которое подключено к линии связи 4, с помощью коммутатора 3 подключается соответствующая линия связи 4 к основной 2, после чего осуществляется вызов требуемого КП 5. Набор номера выбираемого коммутатора осуществляется блоком 22 кнопками управления. Номер объекта, состоящий из трех цифр восьмиричной системы, фиксируется регистром 18 в двоичной форме. В зависимости от того, какая цифра была набрана первой в регистре 18 блоком 24 выбирается соответствукхцее основное направление линии связи. Второй цифрой номера объекта выби рается определенная комбинация линий импульсов выбора..В зависимости от значения второй цифры номера блоком 25 выбирается определенная структур цепей прохождения всех рабочих импульсов в-конкретные линии выбранного основного направления. При наборе третьей цифры номера объекта выбирается определенная комбинация полярностей трех и лпульсо вызова формирователем 19. После полного набора номера выбранного объекта в блоке 17 сравнивается номер выбранного объекта с номерами, хранящимися в блоке памяти адресов, где записаны адреса коммутаторов . При совпадении номеров с вы хода блока 17 поступает сигнал на управляющий вход блока 13, благодар чему ключ блока 13 открывается. После чего блоком 12 через открытый ключ блока 13 осуществляется запуск генератора 14 тактовых импульсов, который вырабатывает четыре тактовы импульса. На первом такте осуществляется посылка первого запускающего импульса повышенной амплитуды и второго импульса, полярности которых были определены .формирователем 19, а направление - блоком 25. Одновременная пdcылкa двух импульсов вызова возможна потому, что во всех случаях они посылаются по разным проводам. Во время второго такта создается пауза и в линию связи посылаются импульсы пониженного напряжения. Во время третьего такта посылается тре тий импульс вызова, полярность кото рого периодически изменяется на про тивоположную инвертором 20. При чет вертом такте к блоку 25 подключается переключатель 26, который опреде ляет род телеоперации. Телеуправление осуществляется формирователем 23. В данном случае. ля подключения дополнительной линии вязи 4 на выбранный коммутатор по ылается команда Включить. ОдноВключитьпостуременно сигнал ает на вход блока 17, где происхоит операция запоминания, номера выбанного коммутатора в состоянии Включить. С выхода блока 17 по- . ступает сигнал на индикатор 16, где загорается лампочка соответствующео выбранного номера коммутатора.Для селективного вызова коммутатора 3 используется блок 6 вызова, содержащий три узла для приема трех селективных импульсов вызова. После набора нужного коммутатора осуществляется опрос объекта, посылая импульсы опроса по свободному проводу линии связи. При этом сдвиг , распределителя 7 осуществляется с помощью изменения полярности напряжения его питания. Распределитель 7 имеет восемь . . внутренних состояний. При первом его состоянии передаются сигналы квитирования, которые используются как подаДресные признаки. На втором-шестом тактах передаются разряды кода гелеоперации. Посылка сигналов телеуправления осуществляется на седьмом такте, информация с которого поступает в блок 8, где срабатывает реле и встает на самоблокировку, одновременно замыкаются контакты блока 9.. На восьмом такте производится передача сигналов состояния объекта. Таким образом, линия связи 4 подключается к основному направлению линии связи, после чего возможно осуществление вызова требуемого КП 5, подключенному к ответвлению. С помощью блока 12 осуществляется стирание информации в регистре 18 и ключ блока 13 закрывается. В резуль,тате устройство подготовлено к вызову требуембго КП 5. Вызов требуемого КП 5 осуществляется аналогично вызову коммутатора,/ При сравнении номера вызываемого КП 5 в блоке 17 с номерами, хранящимися в регистре 15 адресов коммутаторов, не обнаружив совпадения адресов, блок 17 выдает сигнал на управляющий вход блока ключа. 13, благодаря чему ключ открывается и происходит вызов После опроса требуемого КП 5для отключения линии связи 4 набирается номер коммутатора и посылается команда Отключить, благодаря чему на коммутаторе реле снимается с самоблокировки и контакты размыкаются, Одновременно в блоке 17 командой отключить, которая поступает с формирювателя 23, происходит стирание состояния Включить выбранно го адреса -коммутатора. В случае, если какой-либо коммутатор находится в .состоянии Включить- и будет произведен набор дру гого номера коммутатора для посылки команды Включить, блок 17 не выдает сигнала на управляющий вход бдока 13. в этом случае необходимо набрать номер включенного коммутато ра, послать команду Отключить, после чего можно вызьшать любой дру гой коммутатор.. Таким образом, введение коммутат ров линий связи в телемеханическую систему no3Boj HeT обслуживать большее количество КП при максимально возможной длине линии связи, так ка одновременно к основному направлени линии связи подключается только одн дополнительная линия связи. При это суммарная длина линии связи основно го направления и любого одного из ответвлений не должна превышать заданных параметров. Введение коммутаторов позволяет увеличить информационную емкость системы за счет использования одина ковых адресов на ответвлениях, так как одновременно может быть подключено только одно ответвление.. Общее количество адресов одного направления при этом достигает NO NK + (NH - N.) -п, . где N - количество адресов коммутаторов ; - Максимально возможное количество . адресов КП на одном направлении; - количество ответвлений. Причем N|, должно быть меньше Ыц. Так, при NH 16 или 17 можно организовать 272 адреса. Введение коммутаторов позволяет y лeньшить суммарную длину линий свя зи, так как нет параллельных участков линий связи. 1 Коммутатор линии связи реализован из стандартных блоков аппаратуры КП телемеханического устройства, взятого за прототип. Формула изобретения Система телемеханики, содержащая на диспетчерском пункте первый регистр памяти, первый выход которого подключен к первому входу формирователя полярности сигнала, выход которого соединен с первым, входом блока развязки, блок питания, выход которо го соединен с первым входом блока ввода команд, первый выход которого подключен к второму входу первого регистра памяти, второй выход - к .первому входу индикатора, к второму входу которого подключен второй выход первого регистра памяти, третий и ч етвертый выходы которого соединены соответственно с вторым входом блока развязки и первым входом линейного блока, выход которого соединен с входом блока аварийной телесигнализации, генератор тактовых импульсов, первый и второй выходы которого подключены соответственно к второму входу формирователя полярности сигнала и к входу формирователя синхроимпульсов, первый выход которого через инвертор соединен с третьим входом формирователя полярности сигнала, второй выход формирователя синхросигиа.па соединен с входом программно-временного блока, выход которого соединен с выходом диспетчерского пункта, блок ввода адреса, выход которого соединен с вторым входом регистра памяти, формирователь сигналов телеуправления, выход которого соединен с входом переключателя, вход-выход программно-временного блока подключен к первому входу-выходу переключателя, второй вход-выход которого соединен с первым входом-выходом блока развязки, второй вход-выход которого соединен с В5 одом-выходом линейного блока, входы-выходы которого соответственно подключены через основные линии связи к входам-выходам линейных блоков контролируемых пунктов, о т л а юща- я с я тем, что, с целью повышения информативности системы, в нее введены на диспетчерском пункте второй регистр памяти, блок сравнения и блок ключей, выход которого соединен с входом генератора тактовых импульсов, первый и второй выходы блока сравнения соеди ю1ны соотретственно с третьим входом индикатора и первым входом блока ключей, к второму входу которого подключен третий выход блока ввода команд, пятый выход первого регистра памяти соединен с первым входом блока срав- . ненля, к второму входу которого подключен выход формирователя сигналов телеуправления, вход-выход блока сравнения соединей с входом-выходом второго регистра памяти ,t в систему также введены коммутаторы, каждый из которых содержит блок вызова, распределитель сигналов, блок аварийной телесигнализации, блок сигналов телеуправления и блок ключей, вход-вькод блока сигналов телеуправления подключен к первому входу распределителя импульсов, к второму входу которого подключен выход блока аварийной телесигнализации, вход-выход распределителя сигналов подключен к входу-выходу блока вызова, входы-выходы которого Соединены соответственно через дополнительные линии связи с основными линиями связи и с входами блока ключей коммутатора, выходы которого
соединены соответственно о входами-выходами линейных блоков контролируемых пунктов.
Источники информации, принятые во внимание при экспертизе
1.Тутевич В.И. Телемеханика М., Энергия у 1973, с.246-247,
2.Авторское свидетельство СССР 525147, кл. G 08 с 19/28, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики | 1982 |
|
SU1152015A1 |
| УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ | 1995 |
|
RU2111545C1 |
| Устройство для приема и передачи телеинформации | 1977 |
|
SU696519A1 |
| Комплексное телемеханическое устройство | 1980 |
|
SU960892A1 |
| Устройство для приема и регистрации телесигналов | 1978 |
|
SU698031A1 |
| Система телемеханики | 1983 |
|
SU1149296A1 |
| Диспетчерский полукомплект теле-МЕХАНичЕСКОгО уСТРОйСТВА | 1979 |
|
SU822227A1 |
| Система телемеханики | 1977 |
|
SU690530A1 |
| Устройство для телеизмерения и телесигнализации тяговых подстанций электрофицированных железных дорог | 1989 |
|
SU1716453A1 |
| УСТРОЙСТВО ТЕЛЕМЕХАНИКИ | 1995 |
|
RU2111546C1 |