в
7 5
/
СО
со о:)
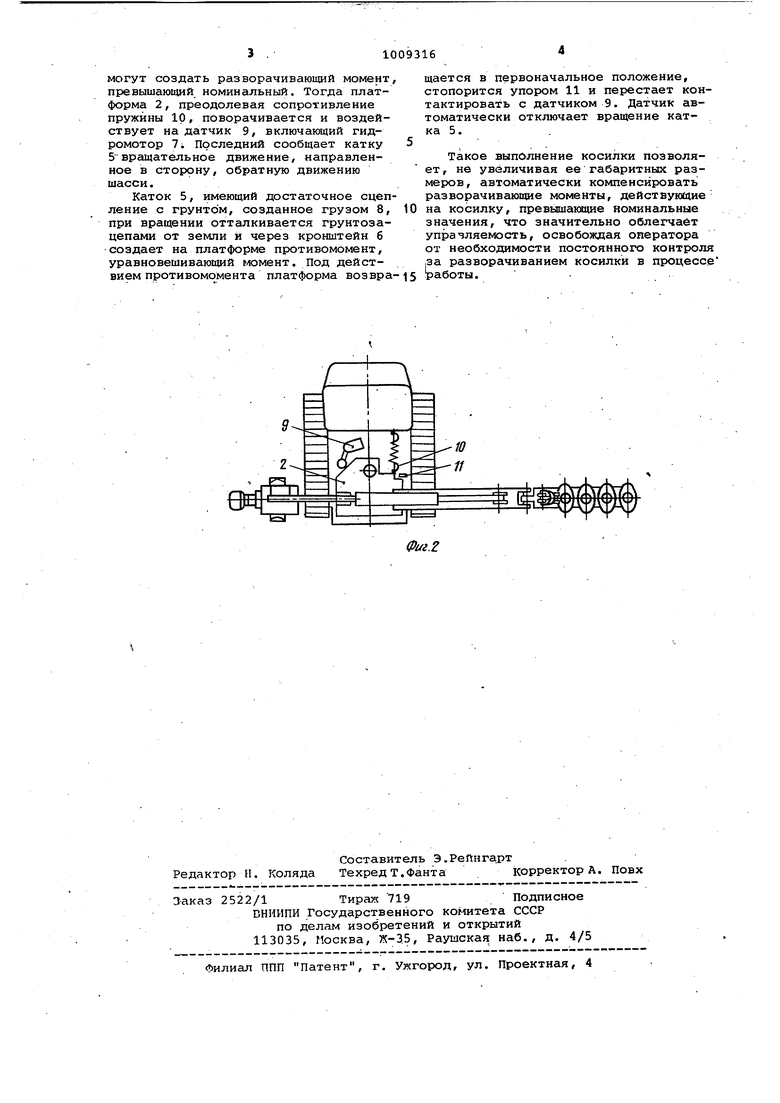
Фиг.1 Изобретение относится к области сельскохозяйственного машиностроени и может быть использовано преимущес венно для окашивания растительности на от.косах каналов и дамб. Известна косилка, включающая базовую машину, поворотную раму, режущий аппарат с копирующей лыжей, раму режущего аппарата, а также гид равлическую систему управления режу щим аппаратом f . Недостатком этого устройства является наличие большого момента, возникающего от действия сил сопротивления резанию, разворачивающего базовую машину в горизонтальной пло кости, что ухудшает управляемость косилкой и приводит к снижению произ водительности. Особенно велико знач ние разворачивающего момента при окашивании грубостебельчатой растит тель ности или при большой густоте растительности в каналах больших га баритов. При этом величина разворачивающего момента существенно измен ется в зависимости от изменения сте пени густоты и вида растительности. Известна косилка, содержащая самоходное шасси, поворотную платформ с закрепленной на ней стрелой с рабочим органом, стабилизатор, выполненный в виде опорного катка 21 . В этой машине разворачивапщий момент может быть уравновешен выдви жением стабилизатора, что несколько улучшает управляемость машиной. Однако выдвижение стабилизатора приводит к увеличению габаритов машины, что вызывает необходимость со дания вдоль трассы канала проезжей полосы значительно более широкой, чем габариты базового тягача, а это требует дополнительных затрат средст и времени на строительно-планировочные работы и вместе с тем, увеличивает полосу отчуждения вдоль трассы канала, а следовательно, и стоимость окащивания. Кроме того, необходимость уравновешивания разворачивающего- момента, часто меняющегося по величине, требует от .оператора большого напряжения при управлении косилкой. Целью изобретения является уменьшение габаритных размеров и облегчение управления косилкой. Укаэ.анная цель достигается тем, что опорный каток снабжен приводом, а шасси - датчиком положения поворот ной платформы, который связан с приводом опорного катка. Датчик обеспечивает автоматическо включение обратного вращения катка при превышении номинального разворачивающего момента на платформе. Датчик может быть выполнен, например, в виде рычага, один конец которого взаимодействует с платфор-т мой, а другой управляет золотником, включающим или выключающим приводом катка. Такое выполнение.косилки позволяет, не увеличивая ее габаритных размеров, автоматически исключить влияние -опасных разворачивающих моментов нарушающих управляемость косилкой. На фиг. 1 изображена предлагаемая косилка, вид сзади; нафиг. 2 то же, вид в плане. Косилка состоит из самоходного шасси 1, на котором смонтирована поворотная в горизонтальной плоскости платформа 2. На платформе закреплена стрела 3 с рабочим-органом 4, устанавливаемая при работе сбоку тягача. С другой стороны тягача установлен каток 5, снабженный грунтозацепами и связанный с поворотной платформой 2 кронштейном б. Каток 5 приводится во вращение, например, гидромотором 7. Для уравновешивания стрелы 3 с рабочим органом 4 и улучшения сцепления катка 5 с грунтом предусмотрены грузы 8. Управление гидромотором 7 осуществляется с помощью датчика 9, выполненного, например, в виде рычага, один конец которого взаимодействует с платформой, а другой управляет зйлотником (на чертежах не показан), включающим гидромотор 7. Пружины 10 служат для удержания от разворота плат; формы 2, а упор 11 фиксирует платформу в рабочем положении. Работает косилка следующим образом. Самоходное шасси 1 с установленной на нем поворотной платформой 2, на которой закреплена стрела 3 с рабочим органом 4, перемещаясь вдоль оси канала по спланированной полосе на берме, производит окашиваниерастительности с откоса канала. Во время окашивания растительности на рабочий орган действуют силы со- противления резанию, которые создают момент, стрег/1ящийся развернуть стрелу и вместе с ней всю косилку в горизонтальной плоскости (по часовой стрелке на фиг. 2), нарушая управляемость косилкой. При работе на участках откосов с негустой растительнос-гтью или малым количеством грубостебельчатой растительности силы сопротивления резанию невелики и разворачивающий момент не вызывает нарушения управляемости шасси, а стрела с платформой удерживается от поворота пружиной 10, при этом датчик 9 не контактирует с платформой 2, гидромотор 7 отключен и каток 5 свободно перекатывается по грунту. При работе на участках откосов с густой или грубостебельчатой растительностью возросшие силы сопротивления резанию
могут создать разворачивающий момент, превышающий номинальный. Тогда платформа 2, преодолевая сопротивление пружины 10, поворачивается и воздействует на датчик 9, включающий гидромотор 7; Последний сообщает катку 5 врсидательное движение, направленное в сторону, обратную движению шасси.
Каток 5, имеющий достаточное сцепление с грунтом, созданное грузом 8, при вращении отталкивается грунтозацепами от земли и через кронштейн б создает на платформе противомомент, уравновешивающий момент. Под действием противомомента платформа возвращается в первоначальное положение, стопорится упором 11 и перестает контактировать с датчиком 9. Датчик автоматически отключает вращение катка 5.
Такое выполнение косилки позволяет, не увеличивая ее габаритных размеров , автоматически компенсировать разворачивающие моменты, действующие на косилку, превышающие номинальные значения, что значительно облегчает упрз ляемость, освобождая оператора от необходимости постоянного контроля |3а разворачиванием косилки в процессе работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Косилка для окашивания каналов | 1986 |
|
SU1335163A1 |
| Механизм навески режушего аппарата косилки для окашивания откосов или дна каналов | 1983 |
|
SU1158077A1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ОТКОСОВ И ДАМБ | 1972 |
|
SU424524A1 |
| ГИДРОМАНИПУЛЯТОР МОБИЛЬНОГО РОБОТА | 2022 |
|
RU2773065C1 |
| Косилка для окашивания каналов | 1988 |
|
SU1544245A1 |
| КУСТОРЕЗ | 2005 |
|
RU2316206C2 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| Механизм навески режущего аппарата косилки для окашивания каналов | 1986 |
|
SU1391522A1 |
| Механизм навески режущего аппарата уборочных машин для окашивания каналов и дамб | 1983 |
|
SU1117002A1 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2009 |
|
RU2390611C1 |
КОСИЛКА, содержащая самоходное шасси, поворотную платформу с закреплённой на ней стрелой с рабочим органом, стабилизатор, выполненный в виде опорного катка, о т личающаяся тем, что, с целью уменьшения габаритов косилки и облегчения управления ею, опорный каток снабжен приводом, а шасси датчиком, положения поворотной платформы, который связан с приводом опорного катка.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ВСЕСОЮЗНАЯ nATSi.:,^ -"^^Хг'КЧЗСКАЯбибляогека МБ АКОСИЛКА | 0 |
|
SU324981A1 |
| кл, А 35/26, 1970 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ОТКОСОВ И ДАМБ | 1972 |
|
SU424524A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
