жащее шесть источников опорного напряжения, два масштабных резистора и интегратор, выход которого соеди.йен с первым выводом первого масштабного резистора, второй вывод которого подключен к входу интегратора, выход которого соединен с первым выво- дом четырехдиодного ограничительного моста, второй вывод которого подклгочен к входу интегратора, выходы первого и второго источников опорного напряжения соединены соответственно с третьим и четвертБ1м выходами четырехдиодного ограничительного моста, отличающееся тем, что, с целью повышения точности, в него вве дены инвертор и первый и второй блоки огран 1чения, выходы которых подключены соответственно к входу интеграто-, ра и к первому выводу второго масштабного резистора, второй вывод которого соединен с входом интегратора, выход которого соединен через инвертор с информационным входом первого блока ограничения и непосредственно с информационным входом второго блока ограничения; первый и второй управляющие входы первого блока ограг ничения соединены с выходами соответственно третьего и четвертого источников опорного напряжения, а первый и второй управляющие входы второго блока ограничения соединены с выходами соответственно пятого и шестого источников опорного напряжения.
4, Устройство для моделирования механических систем с трением, содержащее шесть источников опорного напряжения, два масштабных резистора и интегратор, выход которого является выходом устройства, вход которого соединен с первьом вьшодом первого Масштабного резистора, вторЬй вывод которого подключен к входу интегратора, выход которого соединен с первым выводом четырехдиодного ограничительного моста, второй вывод которого подключен к входу интегратора, выходы первого и второго источников опорного напряжения соединены соответственно с третьим и четвертым рыводами четырехдиодного ограничительного моста, отличающееся тем, что, с целью повышения точности, в него введены первый и второй блоки ограничения, выходы которых подключены соответственно к входу интегратора и к первому выводу второго масштабного резистора/ второй вывод которого соединен с входом интегратора, выход которого подключен к информационным входам первого и второго бл6ков ограничения,первый и второй управ ляющие входы первого из которых соединены соответственно с выходами третьего и четвертого источников опорного напряжения, а первый и второй управляющие входы второго блока ограничения соединены с выходами соответственно пятого и шестого источников опорного напряжения.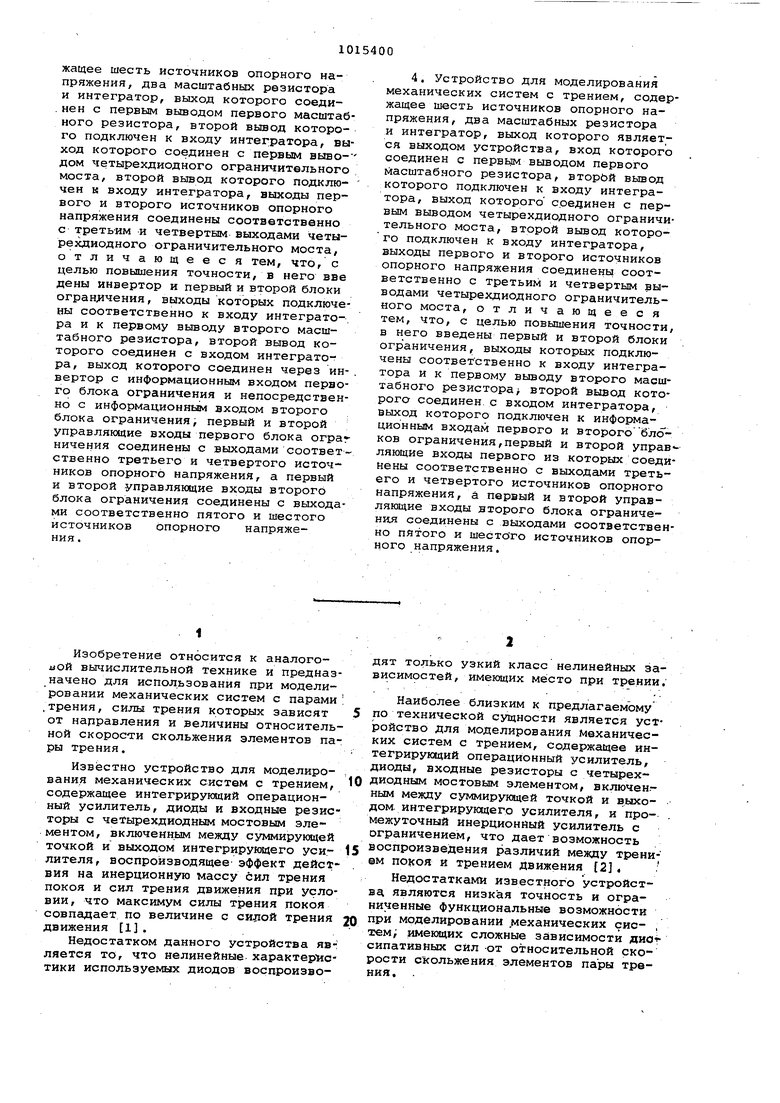

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования коэффициента трения (его варианты) | 1981 |
|
SU1015399A1 |
| Устройство для моделирования сухого трения | 1982 |
|
SU1091186A1 |
| Устройство для моделирования механической передачи | 1978 |
|
SU752387A1 |
| Устройство для моделирования коэффициента трения | 1982 |
|
SU1076919A2 |
| Устройство для воспроизведения зависимости силы трения от скорости пар трения (его варианты) | 1982 |
|
SU1043682A1 |
| Устройство для моделирования КПД механических передач (его варианты) | 1982 |
|
SU1076924A1 |
| Устройство для моделирования муфт трения | 1981 |
|
SU1003109A1 |
| Устройство для моделирования процессов наполнения и опорожнения двух связанных через сопло резервуаров | 1981 |
|
SU982027A1 |
| Устройство для моделирования силы трения | 1981 |
|
SU999071A1 |
| Устройство для воспроизведения зависимости силы трения от нормальной силы,скорости,времени и предварительного смещения | 1985 |
|
SU1312619A1 |
1. Устройство для моделирования механических систем с трением, содержащее шесть источников опорного напряжения, ДБа-масштабных резистора и интегратор, выход которого является выходом устройства,- вход которого соединен с первым выводом первого масштабного резистора, второй вывод которого подключен к входу интегратора, выход которого соединен с первым выводом четырехдиодного ограничительного моста, второй вывод которого подключен к входу интегратора, выходы первого и второго источников опорного напряжения соединены соответственно с третьим и четвертым выводами четырехдиодного ограничительного моста, отличающееся тем, что, с целью повышения точности, в него введены инвертор и первый и второй блоки ограничения, выходы которых подключены соответственно к входу интегратора и к первому выводу второго масштабного резистора, второй вывод которого соединен с входом интегратора, выход которого подключен через инвертор к информационным входам первого и второго блоков ограничения, первый и второй управляющие входы первого из которых соединены соответственно с выходами третьего и четвертого источников опорного напряжения, а первый и второй управляющие входы второго блока ограничения соединены с выходами соответственно пятого и шестого источников опорного напряжения. , 2. Устройство для моделирования механических систем с тренИем, содержащее шесть источников опорного напряжения, два масштабных резистора и интегратор, выход которого являЧется выходом устройства, вход которого .соединен с первым выводом первого масштабного резистора, второй вьшод которого подключен к входу.интегра-. тора, выход которого соединен с первым выводом четырехдиоднрго ограничительного моста, второй вывод кото(Л рого подключен к входу интегратора, выход первого и второго источников с опорного напряжения соединены соответственно с третьим и четвертым выводами четырехдиодного ограничительного моста, отличаю две с я, тем, что, с целью повышения точности, в наго введены инвертор и первый и второй блоки ограничения, выходы которых соответственно к входу интегратора и к первому вьЁводу второго масштабного резистора, второй вывод СП которого соединен с входом интегра4 тора, выход которого соединен через инвертор с информационным входом второго блока ограничения и непосредственно с информационным входом-первого блока ограничения, первый и второй управляющие входы первого блока ограничения соединены с выходами соответственно третьего и четвертого источников опорного напряжения, а первый и второй управляющие входы второго блока ограничения соединены с выходами соотве.тственно пятого и шестого источников опорного напряжения. 3. Устройство для моделирования 4exaничecкиx систем с трением, содер
Изобретение относится к аналоговой вычислительной технике и предназначено для использования при моделировании механических систем с парами .трения, силы трения которых зависят от направления и величины относительной скорости скольжения элементов пары трения.
Известно устройство для моделирования механических систем с трением, содержащее интегрирующий операционный усилитель, диоды и входные резисторы с четырех диодным мостовым элементом, включенн.ым между суммирующей точкой и выходом интегрирующего усилителя, воспроизводящее- эффект действия на инерционную массу бил трения покоя и сил трения движения при условии, что максимум силы трения покоя совпадает по величине с сигюй трения движения 1.
Недостатком данного устройства является то, что нелинейные характеристики используемых диодов воспроизводят только узкий класс нелинейных зависимостей, имеющих место при трении;
Наиболее близким к предлагаемому по технической сущности является устройство для моделирования Механических систем с трением, содержащее ннтегрирующий операционный усилитель, диоды, входные резисторы с четырехдиодным мостовым элементом, включен.ным между суммирующей точкой и выходом интегрирующего усилителя, и про- . межуточный инерционный усилитель с ограничением, что дает возможность
воспроизведения различий между трением покоя и трением движения 2,
Недостатками известного устройства являются низкая точность и ограниченные функциональные возможности
при моделировании механических сие- ,
тем; имекядих сложные зависимости дног сипативных сил -от относительной скорости сКольжения элементов пары трения. .
1Гель изобретения - повышение точности и расширениефункциональных возможностей устройства.
Указанная цель достигается тем, что в устройство для моделирования механических систем с трением, содержащее шесть источникбв опорного напряжения, два масштабHfcix резистора и интегратор, выход которого является выходом устройства, вход которого соединен с пе)вым выводом первого масштабного р езистора, второй выход которого подключен к входу интегратора, выход которого соединен с первым выводом Четырехдиодного ограничительного моста, второй .вывод которого поД ключей к входу интегратора, выходы первого и второго счетчиков опорного напряжения соединены соответственно с третьим и че гвертым выводами четырехдиодного ограничительного моста, введены инвертор и первый и второй блоки ограничения, выходы которых подключены соответственно к входу интегратора и к перйому выводу второго масштабного резистора, второй вывод которого соединен с входом интегратора, выход которого подключен через инвертор к информационным входам первого ивторого блоков ограничения, первый и второй управляющие входы первого из которых соединены соответственно с вьхкодами третьего и четвертого источников опорного напряжения, а первый и второй .управляющие входы второго блока ограничения соединены с выходами соответственно пятого и шестого источников опорного напряжв ния.
По второму варианту в устройство для моделирования механических систем с трением, содержащее шесть источников опорного напряжения, два масштабных резистора и интегратор, выход которого является выходом устройства, вход которого соединен с первым выводом первого масштабного резистора, второй вывод которого подключен к входу интегратора, выход которого соединен с первым выходом четырехдиодного о граиичитвльного моста, второй вывод которого подключен к входу интегратора, выход первого и второго источников опорного напряжения соединены соответственно с третьим и четвертым выводами четырехдиодного ограничительного моста, введены инвертор и первый и второй блоки ограничения, выходы которых подключены соответственно к.входу интегратора и к первому выводу второго масштабного резистора, второй-вывод которото соединен с входом интегратора, выход которого соединен через инвертор с ииформациоиным входом второго блока ограиичения и непосредственно с информационным входом первого блока ограничения, первый и второй управлякяцие входы первого блока ограничени-ттсоединены с выходгши соответственно третьего и четвертого источников опорного напряжения, а первый и второй управляющие входы второго блока ограничения соединены с выходами соответственно пятого и шестого источников опорного напряжения.
По третьему варианту в устройство для моделирования механических сис0тем с трением, содержащее шесть источников опорного напряжения, два масштабных резистора и интегратор, выход которого соединен с первым выводом первого масштабного резистора,
5 второй вывод которого подключен к входу интегратора, вьхкрд которого соединен с первым выводом четырехди-, одного ограничительного моста, втоipo ft вывод которого подключен к входу интегратора,ВЕЙсода первого и второго
0 источников опорного напряжения соедиг нены соответственно с третьим и четвертым выводами Четырехдиодного ограничительного моста, введены инвертор и первый и второй блоки ограничения-,
5 выходы которых подключены соответственно к входу интегратора и к пёрво-му выводу второго масштабного резистора, второй вывод которого соединен с входом интегратора, выход которого
0 соединен через инвертор с информационным входом первого блока ограничег ния и непосредственно с информационным входом второго блока ограничения, первый и второй управляющие входы пер
5 вого блока ограничения соединены с выходами соответственно третьегои четвертого источников опорного напряжения , а первый и второй управляющие входы второго блока ограничения сое0динены с выходами соответственно пятого и шестого источников опорного напряжения.
По четвертому варианту в устройство для моделирования механических систем с трением, содержащее шесть
5 источников опорного напряжения, двамасштабных резистора и интегратор, выход которого является выходом устройства, вход которого соединен- с первым выводом первого масштабного ре0зистора, второй вывод которого подключен к входу интегратора, выход которого соединен с первым выводом четырехдиодного ограничительного моста, второй вывод которого подключен к вхо5ду интегратора, выходы первого и второго источников опорного напряжения соединены соответственно с третьим и четвертым выходами Четырехдиодного ограничительного моста, введены пер0вый и второй блоки ограничения, выходы которых подключены соответственно к входу интегратора и к пepвo 4y выводу второго масштабного резистора, второй вывод которого соединен с входом интегратора, выход которого поц
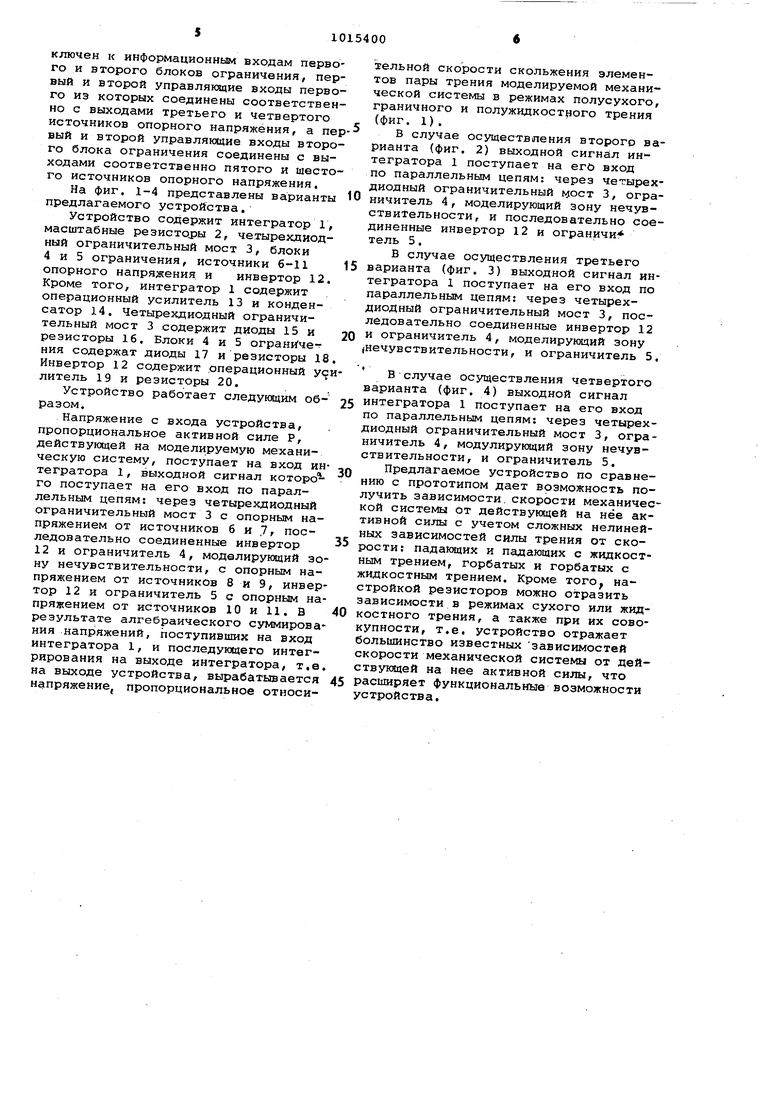
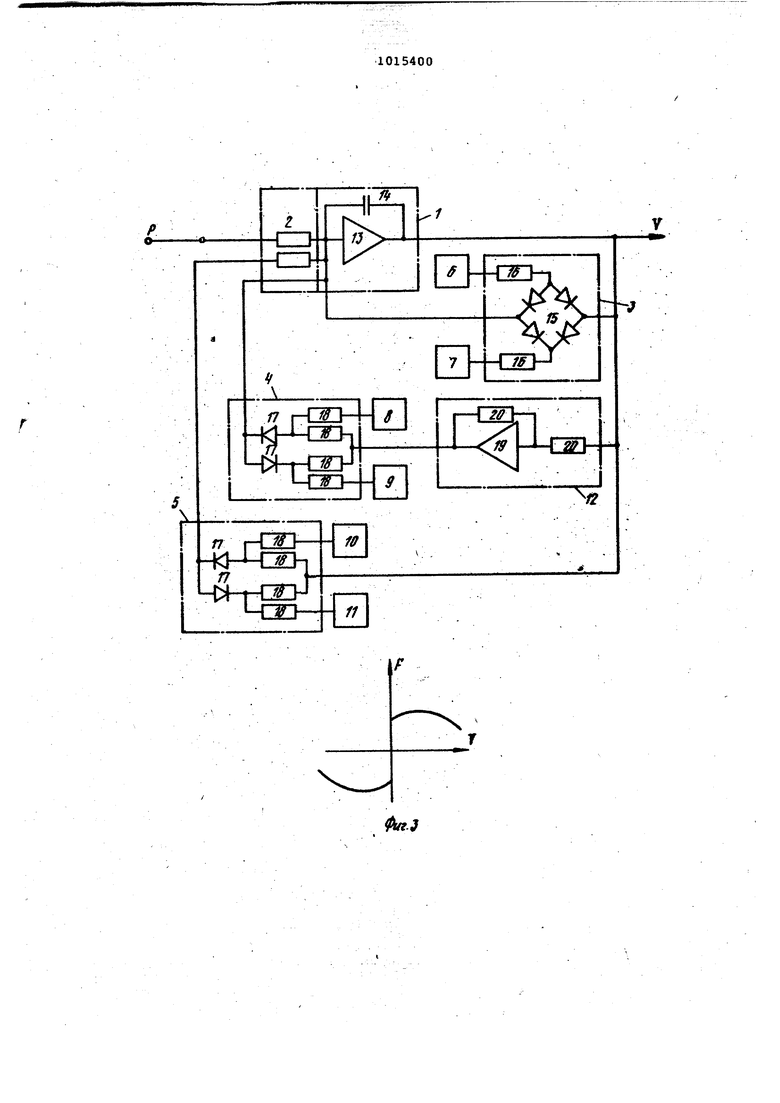
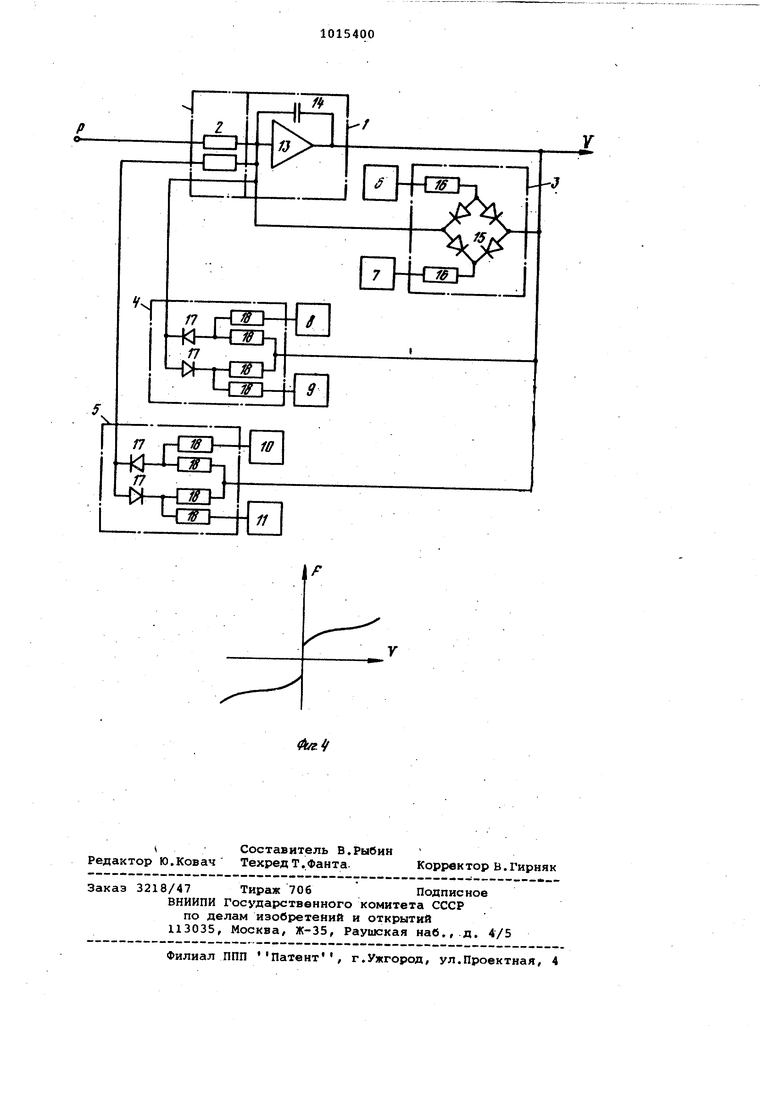
5 ключей к информационным входам первого и второго блоков ограничения/ первый и второй управлякяцие входы первого из которых соединены соответственно с выходами третьего и четвертого источников опорного напряжения, а пер вый и второй управляющие входы второго блока ограничения соединены с выходами соответственно пятого и шестого источников опорного напряжения. На фиг, 1-4 представлены варианты предлагаемого устройства. Устройство содержит интегратор 1, масштабные резисторы 2, четырехдиодный ограничительный мост 3, блоки 4 и 5 ограничения, источники 6-11 опорного напряжения и инвертор 12. Кроме того, интегратор 1 содержит операционный усилитель 13 и конденсатор 14. Четырехдйодный ограничительный мост 3 содержит диоды 15 и резисторы 16. Блоки 4 и 5 огранйче-г ния содержат диоды 17 и резисторы 18 Инвертор 12 содержит .операционный уси литель 19 и резисторы 20. Устройство работает следующим образом. Напряжение с входа устройства, пропорциональное активной силе Р, действующей на моделируемую механическую систему, поступает на вход интегратора 1, выходной сигнал которо го поступает на его вход по параллельным цепям: через четырехдиодный ограничительный мост 3 с опорным напряжением от источников 6 и ,7, последовательно соединенные инвертор 12 и ограничитель 4, модалирунвдий зону нечувствительности, с опорным напряжением от источников 8 и 9, инвертор 12 и ограничитель 5 с опорным напряжением от источников 10 и 11. В результате алгебраического суммирования напряжений, поступивших на вход интегратора 1, и последующего интегрирования на выходе интегратора, т.е на выходе устройства/ вырабатывается напряжение, пропорциональное относительной скорости скольжения элементов пары трения моделируемой механической системы в режимах полусухого, граничного и полужидкоеT Joro трения (фиг. 1). В случае осуществления второго варианта (фиг. 2) выходной сигнал ин тегратора 1 поступает на егй вход по параллельным цепям: через четырехдиодный ограничительный мост 3, ограничитель 4, моделирующий зону нечувствительности, и последовательно соединенные инвертор 12 и ограничи тель 5. В случае осуществления третьего варианта (фиг. 3) выходной сигнал интегратора 1 поступает на его вход по параллельным цепям: через четырехдиодный ограничительный мост 3/ последовательно соединенные инвертор 12 и ограничитель 4 / моделируклций зону (Нечувствительности, и ограничитель 5. В случае осуществления четвертого варианта (фиг. 4) выходной сигнал интегратора 1 поступает на его вход по параллельным цепям: через четырехдиодный ограничительный мост 3/ ограничитель 4/ модулирующий зону нечувствительности, и ограничитель 5. Предлагаемое устройство по сравнению с прототипом дает возможность получить зависимости, скорости механической системы от действующей на нее активной силы с учетом сложных нелинейных зависимостей силы трения от скорости: падаквдих и падающих с жидкостным трением, горбатых и горбатых с жидкостным трением. Кроме того настройкой резисторов можно отразить зависимости в режимах сухого или жидкостного трения, а также при их совокупности, т.е. устройство отражает большинство известных зависимостей скорости механической системы от действукяцей на нее активной силы/ что расширяет функциональные возможности устройства.
Г
HHhl
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ МЕХАНИЧЕСКИХСИСТЕМ | 0 |
|
SU263294A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ^МЕХАНИЧЕСКИХ | 0 |
|
SU366478A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
