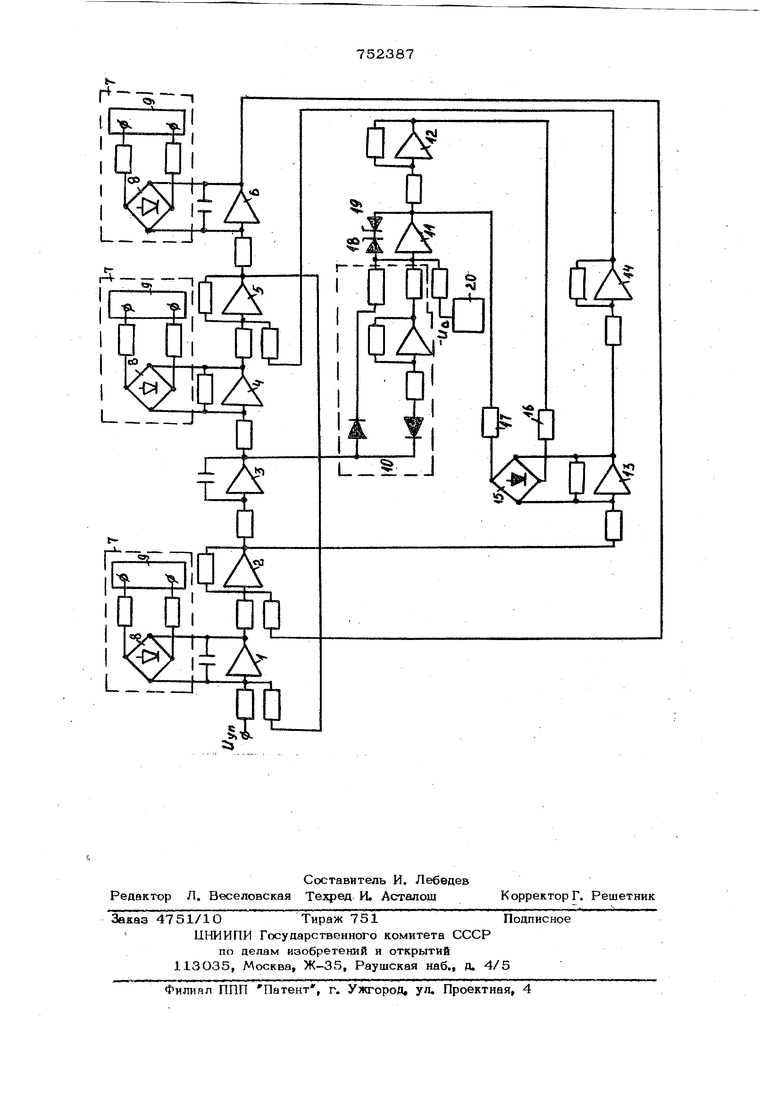
Изрбретение относится к средствам аналоговой вычислительной техники и пред назначено для моделирования систем, содержащих механические передачи. Известны аналоговые устройства для моделирования механических передач, содержащие интеграторы, усилители и ограничители. При этом в основу устройства положены различные математические мо дели механических передач ij . Наиболее близким по технической сущности к предлагаемому является устройст- . во, моделирукжцее механическую передачу, представленную двумя сосредоточенными массами (массой двигателя и массой нагрузки), разделенными упругой связью, и содержащее интеграторы, сумматоры и элементы моделирования нелинейности 2, Недостаток такого устройства заключается в недостаточной точности моделирования, поскольку оно не учитывает потери энергии деформации упругих элементов в механической передаче. Цель изобретения - повышение точности моделирования при выбранной математической модели механической передачи. Поставленная цель достигается тем, что в устройство для моделирования механической передачи, содержащее интеграторы, сумматоры, первый усилитель и блоки моделирования нелинейности, причем выход первого интегратора соединен с первым входом первого сумматора, выход которого соединен со входом второго интегратора, выход которого соединен со входом первого усилителя, выход которого подключен к первому входу второго сумматора, выход которого соединен со входом третьего интегратора, выход которого соединен со вторым входом первого сумматора, выход второго сумматора подключен к первому входу первого интегратора, второй вход которого является входом устройства, каждый блок моделирования нелинейности содержит двухсторонний регулируемый ограничитель, выполненный в виде диодного моста, первая диагональ которого подклю- чена к соответствующему источнику опорного напряжения, выходы первого и третьего интеграторов и первого усилителя через вторую диагональ диодного моста соответствующего блока моделирования не- , линейности подключены ко входам своих блоков, дополнительно введены блок выделения модуля сигнала, дополнительный сумматор, второй, третий и четвертый усилители, ограничительные стабилитроны, двух-10 сторонний регулируемый ограничитель, выполненный в виде диодного моста и согла сующими резисторами, дополнительный источник опорного напряжения, причем вы- ход второго интегратора соединен со входом блока выделения модуля сигнала, выход которого соединен с первым входом дополнительного сумматора, а дополнительный источник опорного напряжения соединен со вторым входом дополнительного сумматора, выход которого соединен со входом второго усилителя, вход и выход которого через согласующие резисторы сое динены с первой диагональю диодного моста дополнительного двухстороннего регулируемого ограничителя, выход третьего усилителя через вторую диагональ диодного моста подключен ко входу этого усилителя, вход которого соединен с выходом первого сумматора, а выход третьего усилителя через четвертый усилитель соединен со вторым входом второго сумматора, причем в обратную связь дополнительного сумматора включены встречно-последовательно два ограничительных стабилитрона. F-la чертеже представлена схема предлагаемого устройства. Устройство содержит первый интегратор 1, первый сумматор 2, второй интегратор 3, первый усилитель 4, второй сумматор 5, третий интегратор 6, блоки 7 моделирования нелинейности, каждый из которых содержит четырехдиодный мост 8, подключенный одной диагональю к соответствующему интегратору или усилителю, а другая диагональ четырехдиодного моста 8 подключена к источнику 9 опорного напряжения. Кроме того, устройство содержит блок 10 выделения модуля сигнала, дополнительный сумматор 11, второй, третий и четвертый усилители 12, 13, 14, диодный мост 15 с ограничительными резисторами 16, 17, стабилитроны в обратной связи дополнительного сумматора 18, 19 и дополнительный источник 2О опорного напряжения. Устройство работает следующим образом. Напряжение , пропорциональное движущему моменту на валу двигателя, поступает на вход интегратора 1. С выхода интегратора 1 напряжение, пропорциональное скорости движения выходного вала двигателя, поступает на вход сумматора 2 и с выхода сумматора 2 - на вход интегратора 3, Формируемое на выходе интегратора 3 напряжение Ug поступает на вход усилителя 4, Пока величина U g на выходе интегратора 3 не превысит по абсо-т лютной величине напряжения U д , пропорционального величине люфта Д в механи4eCKoii передаче, на выходе усилителя 4 нет напряжения. Как только | Ug j j Ыд); на выходе усилителя 4 появляется напряжение, поступакщее на вход сумматора 5. Одновременно напряжение с выхода суммйтора 2 поступает на вход усилителя 13, а напряжение с выхода интегратора 3 поступает на блок 1О. С помощью блока Ю на входе сумматора 11 формируется напряжение 1 UglКроме того, на вход сумматора 11. поступает напряжение Уд с источника опорного напряжения 2О. Сумматор 11 выполнен на усилителе без обратной связи и работает в релейном режиме. Величина напряжения U Qf, на его выходе определяется стабилитронами 18, 19 и знак при jUs I Uil противоположен знаку постоянного напряжения с источника опорного напряжения 20. Это напряжение с выходов сумматора 11 и усилителя 12 через ограничительные резисторы 17 и 16 поступает соответственно на диагональ диодного моста 15. Диодный мост 15 с резисторами 16, 17, подключенный к усилителю 12, работает аналогично блоку 7, подключенному к усилителю 4. Пока напряжение I UoI U д| напряжение с выхода сумматора 2, поступающее на вход усилителя 13, не пройдет на его выход, а следовательно, на вход сумматора 5, При ид|знак напряжения на выходе сумматора 11 и усилителя 12 мгновенно меняется на противоположный, а следовательно, меняется знак напряжения на диагонали диодного моста 15, в результате напряжение с выхода сумматора 2 проходит через усилители 13, 14 на вход сумматора 5, на выходе которого формируется напряжение Мц , поступающее на вход интегратора 6, 57 В сочетании с блоками 7 интеграторы, 1 и 6 моделируют действие момента сопротивления от сил сухого трения на валу двигателя и валу нагрузки соответственно. Таким образом, предлагаемое устройство позволяет при моделировании механической передачи учитывать одновременно люфт и потери энергии деформации упругих элементов механической передачи и, в результате, повысить точность моделирования механической передачи. Формула изобретения Устройство для моделирования механической передачи, содержащее интеграторы сумматоры, первый усилитель и блоки моделирования нелинейности, причем выход первого интегратора соединен с первым вхо-t дом первого сумматора, выход которого соединен со входом второго интегратора, выход которого соединен со входом перво го усилителя, выход которого подключен к первому входу второго сумматора, выход которого соединен со входом третьего интегратора, выход которого соединен со вторым входом первого сумматора, выход второго сумматора подключен к первому входу первого интегратора, второй вход которого является входом устройства каждый блок моделирования нелинейности содержит двухсторонний регулируемый ограничитель, выполненный в виде диодного моста, первая диагональ которого подключена к соответствующему источнику опорного напряжения, выходы первого и третьего интеграторов и первого усилителя через вторую диагональ диодного моста соответствукйшего блока моделирования не- линейности подключены ко входам своих 67 блоков, отличающееся тем,что, с целью повышения точности моделирования, в устройство введены блок выделения модуля сигнала, дополнительный сумматор, второй, третий и четвертый усилители, ограничительные стабилитроны двухсторонний регулируемый ограничитель, выполненный в виде диодного моста,согласуКЕцие резисторы и дополнительный источник опорного напряжения, причем выход второго интегратора соединен со входом блока выделения модуля сигнала, выход которого соединен с первым входом дополнительного сумматора, а дополнительный источник опорного напряжения соединен со вторым входом дополнительного сумматора, выход которого соединен со входом второго усилителя вход и выход которого через согласующие резисторы соединены с первой диагональю диодного моста дополнительного двухстороннего регулируемого ограничителя, выход третьего усилителя через вторую диагональ диодного моста подключен ко входу этого усилителя, вход которого соединен с выходом первого сумматора, а выход третьего усилителя через четвертый усилитель соединен со вторым входом второго сумматора, причем в обратную связь дополнительного сумматора включены встречно-последовательно два ограничительных стабилитрона. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 341051, кл. Q 06 G 7/64, 1970. 2. Литовченко Н. Г. и др. Аналитическое и структурное описание механических передач систем автомагического регулирования с ограничениями и люфтами, Автоматика и телемеханика , 1961, Т. ХХП, № 3, с. 11О2 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования коэффициента трения (его варианты) | 1981 |
|
SU1015399A1 |
| Устройство для моделирования коэффициента трения | 1982 |
|
SU1076919A2 |
| Устройство для моделирования механических систем с трением (его варианты) | 1981 |
|
SU1015400A1 |
| Устройство для моделирования КПД механических передач (его варианты) | 1982 |
|
SU1076924A1 |
| Устройство для моделирования многозвенной механической передачи | 1975 |
|
SU641465A1 |
| Устройство для моделирования коэффициента трения | 1981 |
|
SU960859A1 |
| Устройство для моделирования двигателя внутреннего сгорания | 1983 |
|
SU1120371A1 |
| Устройство для моделирования люфта в механической передаче | 1985 |
|
SU1287198A1 |
| Устройство для моделирования механической передачи | 1981 |
|
SU982032A2 |
| Устройство для моделирования газотурбинного двигателя | 1983 |
|
SU1121683A1 |