Изобретение относится к контрольным устройствам для конвейеров и может быть использовано на дробильно-обогатительных и агломерационных фабриках, а также металлургических заводах, перерабатывающих магнетитовые руды.
Известен сигнализатор наличия руды СНР-1063М, предназначенный для непрерывного контроля наличия сыпучих и кусковых руд на транспортерных лентах. Устройство содержит контактный датчик и электронный сигнализатор. Принцип действия его основан на измерении сопротивления электрической цепи при замыкании ее через руду и контроле этого сопротивления чувствительным электронным реле 1.
Известно также устройство, содержащее закрепленные на раме конвейера постоянный магнит и установленный над ним магнитоуправляемый контакт. При сходе ленты металлические тросы ленты образуют с постоянным магнитом поле, которое приводит к срабатыванию магнитоуправляемого контакта. По существу устройство определяет наличие стального троса ленты в зоне действия датчика 2.
Основным недостатком известного устройства является то, что оно не обладает необходимой чувствительностью для определения наличия руды на ленте. Действительно, поскольку магнитоуправляемый контакт расположен над постоянным магнитом в его поле, срабатывание контакта возможно лишь в случае значительного изменения поля, для чего необходимо или уменьшить величину поля, введя сильное шунтирование магнита, или изменить конфигурацию поля. Однако магнетитовая руда по сравнению со сталью, из которой выполнен трос, имеет меньшую максимальную и остаточную намагниченность, и поэтому осуществить сильное шунтирование поля рудой невозможно. Поскольку руда расположена на ленте ровным слоем, внести искажения в конфигурацию поля, подобно стальным тросам, руда не может. Расположение магнитоуправляемого контакта над магнитом приводит к увеличению зазора между магнитом и лентой, что уменьшает взаимодействие магнита и руды. Ущстройство сигнализирует лишь о двух состояниях объектов: «Есть и «Нет, оно не содержит элементов для компенсации внешних магнитных полей.
Целью изобретения является увеличение чувствительности и надежности работы устройства до уровня, необходимого для определения наличия магнетитовых руд на ленте.
Поставленная цель достигается тем, что устройство для контроля наличия магнетитовой руды на ленте конвейера, содержащее установленные на раме конвейера постоянный магнит и магнитоуправляемый контакт, снабжено дву.мя обмотками магнитоуправляемого контакта, конденсатором, резистором, переменным резистором и блоком питания, причем к блоку питания подключены цепь из последовательно соединенных магнитоуправляемого контакта, первой обмотки и резистора и цепь из последовательно соединенных второй обмотки и переменного резистора, а конденсатор включен параллельно первой обмотке, при этом посто нный магнит и магнитоуправляемый контакт установлены под лентой по направлению ее движения так, что направления намагничивания магнита и пружины магнитоуправляемого контакта перпендикулярны направлению движения ленты.
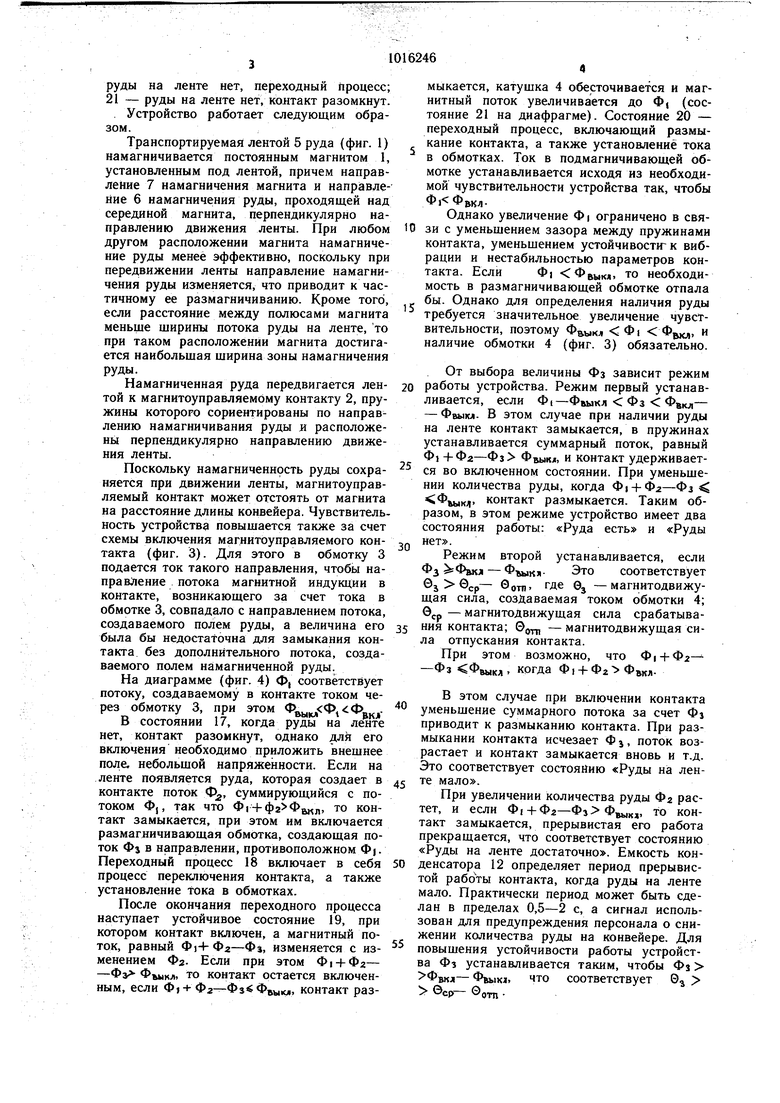
На фиг. 1 схематически изображен участок конвейерной ленты с предлагаемым устройством; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схема включения магнитоуправляемого контакта, на фиг. 4 - диаграмма, поясняющая принцип работы устройства.
Устройство содержит (фиг. 1 и 2) постоянный магнит 1 и магнитоуправляемый контакт 2 со вспомогательными обмотками 3 и 4, установленный под транспортерной лентой 5. Направление 6 намагничения руды магнитом в средней части транспортерной ленты перпендикулярно направлению движения ленты и противоположно направлению 7 намагничения магнита.
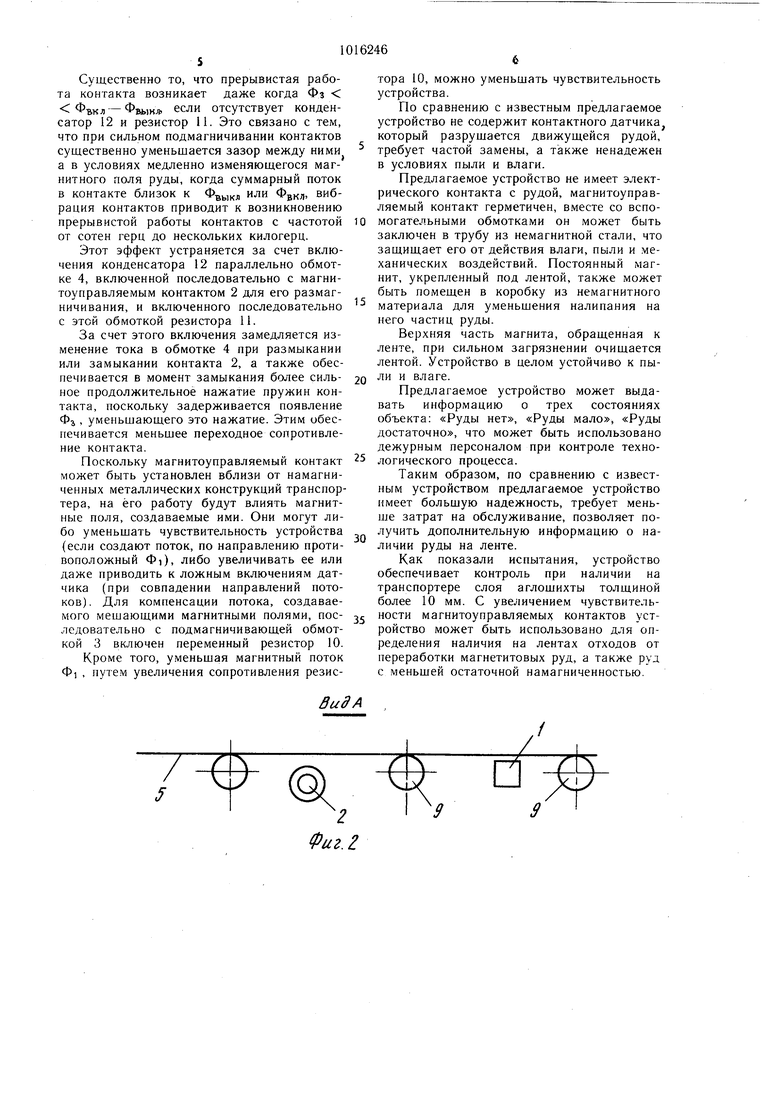
На фиг. 1 и 2 показаны также блок 8 питания устройства и ролики 9 опоры конвейерной ленты. Последовательно с обмоткой 3 магнитоуправляемого контакта 2 (фиг. 3) включен переменный резистор 10, позволяющий компенсировать влияние посторонних магнитных полей и производить регулировку чувствительности устройства.
Последовательно с обмоткой 4 магнитоуправляемого контакта включен резистор 11, определяющий ток в обмотке 4, а параллельно обмотке 4 включен конденсатор 12. На клеммы 13 и 14 подается постоянное напряжение, полярность которого согласована с полярностью конденсатора 12. Напряжение на клеммах 15 и 16 является выходным напряжением устройства.
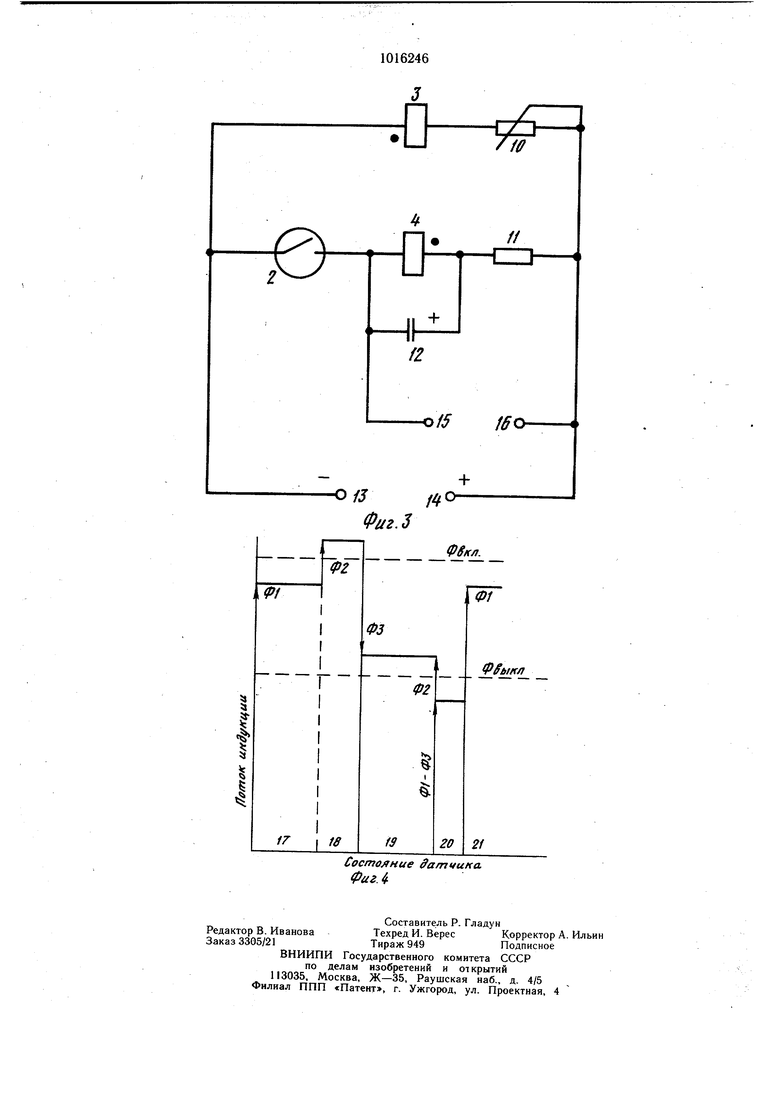
Работа устройства поясняется диаграммой (фиг. 4), где по вертикальной оси откладывается поток индукции, создаваемый в пружинах контакта вспомогательными обмотками или полем намагниченной руды.
Обозначения на фиг. 4: Ф - поток, создаваемый обмоткой 3; Ф,4д - поток, при котором контакт замыкается; Ф„„„.- поток,
,
при котором контакт размыкается; Ч - поток, создаваемый рудой в определенный момент времени; Ф - поток, создаваемый обмоткой 4.
Сдвиг по горизонтали соответствует различным состояниям контакта: 17 - руды на ленте нет, контакт разомкнут; 18 - руда на ленте есть, переходный процесс; 19 - руда на ленте есть, контакт замкнут; 20 -
руды на ленте нет, переходный процесс; 21 - руды на ленте нет, колтакт разомкнут.
Устройство работает следующим образом.
Транспортируемая лентой 5 руда (фиг. 1) намагничивается постоянным магнитом 1, установленным под лентой, причем направление 7 намагничения магнита и направление 6 намагничения руды, проходящей над серединой магнита, перпендикулярно направлению движения ленты. При любом другом расположении магнита намагничение руды менее эффективно, поскольку при передвижении ленты направление намагничения руды изменяется, что приводит к частичному ее размагничиванию. Кроме того, если расстояние между полюсами магнита меньше ширины потока руды на ленте, то при таком расположении магнита достигается наибольшая ширина зоны намагничения руды.
Намагниченная руда передвигается лентой к магнитоуправляемому контакту 2, пружины которого сориентированы по направлению намагничивания руды я расположены перпендикулярно направлению движения ленты.
Поскольку намагниченность руды сохраняется при движении ленты, магнитоуправляемый контакт может отстоять от магнита на расстояние длины конвейера. Чувствительность устройства повышается также за счет схемы включения магнитоуправляемого контакта (фиг. 3). Для этого в обмотку 3 подается ток такого направления, чтобы направление потока магнитной индукции в контакте, возникающего за счет тока в обмотке 3, совпадало с направлением потока, создаваемого полем руды, а величина его была бы недостаточна для замыкания контакта без дополнительного потока, создаваемого полем намагниченной руды.
На диаграмме (фиг. 4) ф, соответствует потоку, создаваемому в контакте током через обмотку 3, при этом 1вы|с/ ВКЛ
В состоянии 17, когда руды на ленте нет, контакт разомкнут, однако для его включения необходимо приложить внешнее поле, небольшой напряженности. Если на ленте появляется руда, которая создает в контакте поток Ф, суммирующийся с потоком Ф|, так что Ф| + то контакт замыкается, при этом им включается размагничивающая обмотка, создающая поток Oj в направлении, противоположном Ф|. Переходный процесс 18 включает в себя процесс переключения контакта, а также установление тока в обмотках.
После окончания переходного процесса наступает устойчивое состояние 19, при котором контакт включен, а магнитный поток, равный Ф1-4- Фг-Ф, изменяется с изменением Фз. Если при этом -Фз Фьыкл, то контакт остается включенным, если Ф) +Фг-Фз Фвы«о1, контакт размыкается, катушка 4 обесточивается и магнитный поток увеличивается до Ф( (состояние 21 на диафрагме). Состояние 20 - переходный процесс, включающий размыкание контакта, а также установление тока в обмотках. Ток в подмагничивающей обмотке устанавливается исходя из необходимой чувствительности устройства так, чтобы
Ф1 ФВКЛОднако увеличение Ф| ограничено в связи с уменьшением зазора между пружинами контакта, уменьшением устойчивости к вибрации и нестабильностью параметров контакта. Если Ф| Фвь1кл. то необходимость в размагничивающей обмотке отпала бы. Однако для определения наличия руды требуется значительное увеличение чувствительности, поэтому Фвыкл Ф1 Фвк и наличие обмотки 4 (фиг. 3) обязательно.
От выбора величины Фз зависит режим 0 работы устройства. Режим первый устанавливается, если Ф1-Фмлкл Фз Фвкл- - Фвыкл. В этом случае при наличии руды на ленте контакт замыкается, в пружинах устанавливается суммарный поток, равный Фу +Ф2-Фз ФБЫКД, И контакт удерживается во включенном состоянии. При уменьшении количества руды, когда Ф1 + Ф2-Фз контакт размыкается. Таким образом, в этом режиме устройство имеет два состояния работы: «Руда есть и «Руды
0
Режим второй устанавливается, если
Фз - Фъыкя- Это соответствует .p- 00ТЛ. где 0J -магнитодвижущая сила, создаваемая током обмотки 4; Ojp - магнитодвижущая сила срабатывания контакта; Э., - магнитодвижущая сила отпускания контакта.
При этом возможно, что Ф|4-Фг- -Фз Фвыкл. когда Ф1-ЬФ2 ФвклВ этом случае при включении контакта
уменьшение суммарного потока за счет Фз приводит к размыканию контакта. При размыкании контакта исчезает Ф j, поток возрастает и контакт замыкается вновь и т.д. Это соответствует состоянию «Руды на лен5 те мало.
При увеличении количества руды Фа растет, и если Ф1Ч-Ф2-Фз Фвыкя. то контакт замыкается, прерывистая его работа прекращается, что соответствует состоянию «Руды на ленте достаточно. Емкость конденсатора 12 определяет период прерывистой работы контакта, когда руды на ленте мало. Практически период может быть сделан в пределах 0,5-2 с, а сигнал использован для предупреждения персонала о снижении количества руды на конвейере. Для
повышения устойчивости работы устройства Фз устанавливается таким, чтобы Ф) Фвкл- Фвыкл. что соответствует Q вер- ©ото Существенно то, что прерывистая работа контакта возникает даже когда Фз Фькл - Фм.шл если отсутствует конденсатор 12 и резистор 11. Это связано с тем, что при сильном подмагничивании контактов существенно уменьщается зазор между ними а в условиях медленно изменяющегося магнитного поля руды, когда суммарный поток в контакте близок к или вибрация контактов приводит к возникновению прерывистой работы контактов с частотой от сотен герц до нескольких килогерц. Этот эффект устраняется за счет включения конденсатора 12 параллельно обмотке 4, включенной последовательно с магнитоуправляемым контактом 2 для его размагничивания, и включенного последовательно с этой обмоткой резистора 11. За счет этого включения замедляется изменение тока в обмотке 4 при размыкании или замыкании контакта 2, а также обеспечивается в момент замыкания более сильное продолжительное нажатие пружин контакта, поскольку задерживается появление Ф , уменьщающего это нажатие. Этим обеспечивается меньщее переходное сопротивление контакта. Поскольку магнитоуправляемый контакт может быть установлен вблизи от намагниченных металлических конструкций транспортера, на его работу будут влиять магнитные поля, создаваемые ими. Они могут либо уменьшать чувствительность устройства (если создают поток, по направлению противоположный Ф), либо увеличивать ее или даже приводить к ложным включениям датчика (при совпадении направлений потоков). Для компенсации потока, создаваемого мешающими магнитными полями, пос- ледовательно с подмагничивающей обмоткой 3 включен переменный резистор 10. Кроме того, уменьшая магнитный поток Ф , путем увеличения сопротивления резисВидАтора 10, можно уменьшать чувствительность устройства. По сравнению с известным предлагаемое устройство не содержит контактного датчика, который разрущается движущейся рудой, требует частой замены, а также ненадежен в условиях пыли и влаги. Предлагаемое устройство не имеет электрического контакта с рудой, магнитоуправляемый контакт герметичен, вместе со вспомогательными обмотками он может быть заключен в трубу из немагнитной стали, что защищает его от действия влаги, пыли и механических воздействий. Постоянный магнит, укрепленный под лентой, также может быть помещен в коробку из немагнитного материала для уменьшения налипания на него частиц руды. Верхняя часть магнита, обращенная к ленте, при сильном загрязнении очищается лентой. Устройство в целом устойчиво к пыли и влаге. Предлагаемое устройство может выдавать информацию о трех состояниях объекта: «Руды нет, «Руды мало, «Руды достаточно, что может быть использовано дежурным персоналом при контроле технологического процесса. Таким образом, по сравнению с известным устройством предлагаемое устройство имеет большую надежность, требует меньше затрат на обслуживание, позволяет получить дополнительную информацию о наличии руды на ленте. Как показали испытания, устройство обеспечивает контроль при наличии на транспортере слоя аглошихты толщиной более 10 мм. С увеличением чувствительности магнитоуправляемых контактов устройство может быть использовано для определения наличия на лентах отходов от переработки магнетитовых руд, а также руд с меньшей остаточной намагниченностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕ ФИКСИРУЮЩЕЕ ФЕРРОМАГНИТНОЕ | 1972 |
|
SU343315A1 |
| Датчик уровня | 1991 |
|
SU1777006A1 |
| СИГНАЛИЗАТОР ПЕРЕМЕЩЕНИЙ | 1969 |
|
SU238014A1 |
| Сигнализатор перемещений | 1975 |
|
SU556518A1 |
| Дискретный уровнемер | 1984 |
|
SU1191744A1 |
| Устройство для управления работой путевого выключателя | 1979 |
|
SU807878A1 |
| Магнитоуправляемое реле | 1980 |
|
SU959183A1 |
| Устройство для управления работой путевого выключателя | 1977 |
|
SU700879A1 |
| Устройство для управления работойпуТЕВОгО ВыКлючАТЕля | 1979 |
|
SU805437A1 |
| Устройство для контроля фазировки выводов обмоток электроизделий | 1982 |
|
SU1056085A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАЛИЧИЯ МАГНЕТИТОВОЙ РУДЫ НА ЛЕНТЕ КОНВЕЙЕРА, содержащее закрепленные на раме конвейера постоянный магнит и магнитоуправляемый контакт, отличаю8 щееся тем, что, с целью повышения чувствительности и надежности работы, оно снабжено двумя обмотками магнитоуправляемого контакта, конденсатором, резистором, переменным резистором и блоком питания, причем к блоку питания подключены цепь из последовательно соединенных магнитоуправ ляемого контакта, первой обмотки и резистора и цепь из последовательно соединенных второй обмотки и переменного резистора, а конденсатор включен параллельно первой обмотке, при этом постоянный магнит и магнитоуправляемый контакт установлены под лентой по направлению ее движения так, что направления намагничивания магнита и пружины магнитоуправляемого контакта перпендикулярны направлению S движения ленть ; (Л С О5 1C О5 //1 3 fy I fianpa/aeHue ижени/} Фиг i
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бухгольц В | |||
| П | |||
| Датчики и реле автоматического контроля в горной промышленности | |||
| М., «Недра, 1971, с | |||
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ДАТЧИК СХОДА РЕЗИНОТРОСОВОЙ ЛЕНТЫ КОНВЕЙЕРА | 0 |
|
SU313759A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
