Изоирстелкс касастс,я усолсригенетвоваHiiii .машины для динамической баланснpojiKu коленчатых валов, роторов и других Jeл вращения, в которой колебания двух независимых ои), вызываемые неуравношчиениостыо балансирус што нздели;;, преобразуются в электрнческие колебания, величины и фазы векторных р/азностен или сумм KOTOpBix ин|)еделя1отся нри помон и электроизмерительной схемы.
Известные такого рода ма И11НЫ не обладают достаточной нроизводительностыо, а нроцесс онределення на них нсуравиовеи енности сложен. Такие машины могут удовлетво ;и1ельно работать только в условиях нолулаборатор)юго. а не серийного производства балансируемых нзделлй.
Оиисываемая ниже машииа иредназначена для балансировки изделн к условиях массового ирои:5вп.1ства. например, четырехкалеичатых валов.
Маншна характеризуется иримененисм в электрической схеме двух независимо работаюигих каналов для иропускания и обработки сигналов, ои)е;;ел-я1ощих величины U фазы неуравиовешениости в двух разных и.тоскостях вращения, а так;,-е налнчием прерывателей в циш сигнала, иодаваемого тщдикатор, н нрименением переключатели для и;- менеиия схемы ири выборе той или иной комбинации нлосквстей уравновештания.
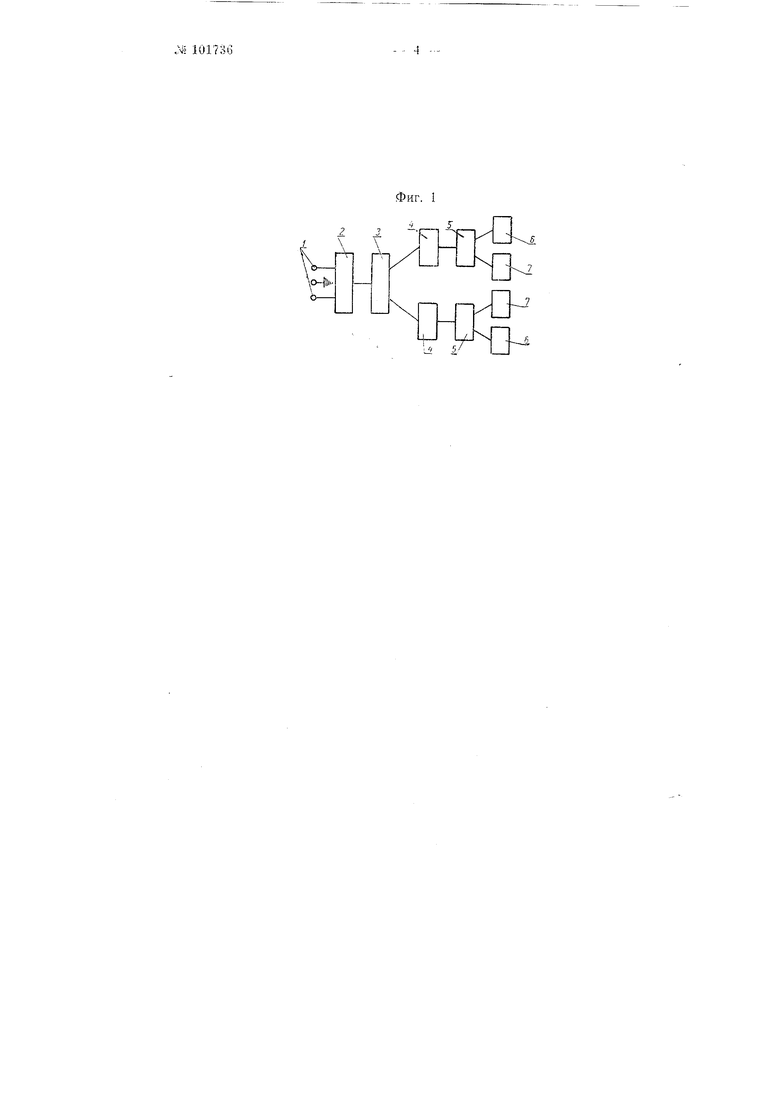
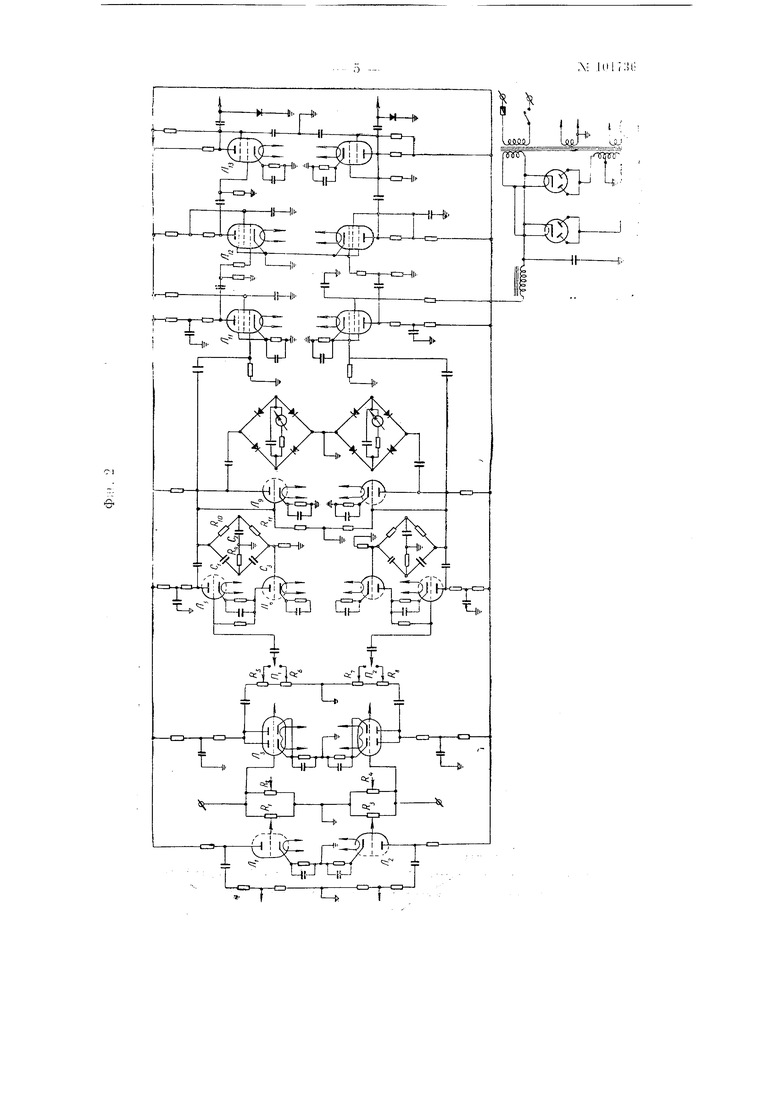
На фнг. 1 изображена нрннниииальная электрическая схема машины; на фиг. 2- схема нульта унравлення.
Так как механическая часть машины общеизвестиа, то онисанию иодлежнт только ее электрическая часть.
Электрическая часть машин), нредназкачена для определения вeлнчuнlJl и углового ))асиилиження дисбаланса одновременно для двух выбранных нлоскостей уравновешнкшия, а: таки.ч для выбора 3TU1X Д )}ух плоекосте тгз (;i:i;Hbix четырех комбинандтй. Она состоит из двух основных частей: Д15ух датчиков и элекTiDOHHOro решающе-нзмерительного устройства - нульта уиравления. Датчик и1)ед{.тавлиет собой магнитную цеиь с KO.ILHOвым зазором, в котором создается радиальиое магнитное иоле. В этo зазоре 1;дол1, об)азуюи(ей колеб.1етея , связанная с люлькой, на сменные нодшииннкл которой устаиавлнвается игейко баланси1)уемое изделие. Датчики ирисоедииены носредстпом зажлмов (1) к иульту yii:i)aBления. Последний иредстаиляет собой сис-тему блоков, из которь х блок (2) служит для выбора нары нлоскостей У1)авновешивания из четырех комбииацнй н )чает фазоинвертор)г н коммутандгонное лстройство. Блок () иредставляет собой с,месительные каскады. В блоках (2) н (3) нроизводитск электрическим сиособом ретненяе 5екторных уравненнй.
Для уско1)ен11я н ун1)ощения нрон:е са снределення )авновеи енности схема носле блока (3) разделяется на два неза :(СИ11ЫХ о.динаково работаюцих к;1нала для каждой нз выбранных илогкостей уравновешнвання. 1ганалы елужаг для нроиускания и об)аботки сигналов н оиределяюг величины и фазы неуравновешенности в двух разных плоексстях вращення и тем самьпг обеспечивают одновременное измерение указанных сипгалов.
в ка;;гд;М канале сяеду оии n;iui;oM (4) являете; .ерек.иочатпль na.(iin:ii iw г. яотенцкометр1, для устанонкл ;л1а-1енкя груиото и т;)4ио;о масштабов. Блоки (5) 1редста ;ля1от couoii алсктрпчеоспо (цльт)ы на ( ц омкссгн. Далее в сал;дом лз каскадов электрические сигнаЛ1,1 поступают к два йло);;1: устройство (6) для пз.черепия величины Il баланса путем итсчета но noKa:;aiia;iM 1т1)уличног(1 яндииатора и устроГ ство (7) для oniUMo.iei-nw углового рас 1д;ло;-1;е1гия иебалакса: к составе ycTpoiicTiia (7) содержатся контактиые системы иои1ка.
Для выбора комбинации иар нлоскостеи уравиовеигивани.ч в цепи сигнала, нодаnaeitoro зга икд1 кп:го1)ы, установлены прерыватели (к нока:;анъ иа чертеже), работающий синхронно и сннфазио с вр;пцаЮ Ц мся балаисируемвм изделием.
Расиредсленис основных элементов схемы по указанным выше блокам следующс; (фнг. 2). , (2) включает нлекгроикые лампы к .Я- нотепциометры R,. R-,, ,, R, и переключатели (не иока3aHj)t на чертенке), а блок- (4) - нереключатели П, ;i П., г нотениномотры R,, Я„ RT, R,.
В блок (5) (рассматривается один из каналов), входят лампы Л,- ;-: /,; и четырехполюсник, состоящи: из eMKOCTeii Cj, С;, н С., и соиротивлеиип R,:, R,,, R,,.
Криицин действия маишиы заключается в измерении колебаний (амнлитуд л и фа.ы) двух точек геометрической оси балансируемого изделия. Для этого механические колебания иреобразуютея в соответствующие электрические, которые в элементах схемы иодвергаются обработке, 1- результате чего величины небалансов в выбранных плоскостях уравновеиптвания угловое расположение указываются на ириборах машииы.
Балансировка ироизводится ири зарезонансном числе оборотов, при KOTOpoit считается. что главная ось совиадает с осью вращения.
Цмиульсы от датчиков через зал;нмы «датчик нравый и «датчик левый поступают на потенциометры плоскостей RJ, Ro, R:(, R.,. Б зависимости от расположения плоскостей уравновещивания но длине балансируемой детали, устанавливаются ползункн указанных нотенциометров.
Для решения векторного уравнения колебания в смесительный блок долл;ен быть иодан на одну сетку лампы jlj полный сигнал правого датчика, а на вторую сетку Toii лс,е ламны чаеть сигнала левого датчика, чонределяемая ноложением движков нотенииометров R:J и R,.
J стаиовлено. что для части комбинаций iiai) плоскостей уравновемивания часть сигиада требуется иодавать в обратной фазе. Для этого служит фазоннверториый каскад на ламие Л. Под;1Ча требуемой части сигнала в фазе или иротивофазе осуществляется иереключателем (на чертеже не показан).
lipou№ реш-ениа векторных уравн-еиий, смесительный блок усиливает снгиал ио напряжению в несколько раз. На выходе из этого блока уснленны результативHbiii: сигнал поступает на мпспгтабные иотс)цнометры Rr, для точной шкалы и R,; для грубой щкалы.
С нереключателя П, сигнал поступает на блок фильтра, нредставляюиц1Й co6oii усилительный каскад из ламп Л. м „,; с отрицательной обратной связью, через i)eoстатно емкостный мостС, С,, С и Ry, R,(
и Rii, Фильтр служит для подавления помех всех иных частот, кроме рабочей частоты сигнала.
С выхода фильтра сигнал постунает на. сетку ламиы Л,, измерительного каскада, с анода KOTOiioii уснленное наиряженис через сухой выирямитель попадает на гальванометр, традуированиый в единиилх днсбаланса.
Одновременно с выхода фильтра е.нгнал ностуиает на блок фазоотметчика,состоящего из трех каскадов иа ламнахЛ,,, Jl,v П ,1|з, аицикаторных лалш н KOHTai;rHi ix ycTpoiicTB (на чертеже не ноказаны). Назначение каскада на лампе Jbi - ноднять уровень сигнала до норога чувствительности следующего, ограннчпвашщего, 1;аскада иа ламие Л)2Изложеине работы машины относится к одному из каналов: работа другого канала аиалолтчна.
Н р е д мет и з о б р е т е н и я
1. Ыашииа для динамической баланснjioi-KH коленчатых валов, роторов и тому подобных предметов, к KOTopoii колебания лкух независимых опор, вызыиаеMi,: иеура)шовешенностью балансируемого нредмета, преобразуются в элект1)ичг-ские колебания, величины и фазы векторных разностей или сумм которых .опреде.яются ири помощи электроизме1)тельnoit схемы, о т л и ч а ю ц а я с я тем, что, с целью ускорения и уирои(ения процесса определения неуравноБе1иеиности, изме);;тельная схема содержлт два независимп работающих канала, которые служат для нроиускания и обработки сигналов, о:г)еделяющих величины и фазы неуравиовеи1енности в двух разных плоскостях вращения, н тем самым вбесиечивают одuocpCMuHHoe измерение укапанных олгнаЛОЕ.
2. Машина по п. 1, о т л и ч а ю щ а яся ТОМ, что, с целью выбора комбинаций пар цлоскостей уравновешцвания, в день сигнала, подаваемого на индикаторы, введены црерывателн, 1)абота1ощне синхронно и синфазко с вращающимся балансируемым нрсдметом и нозволяющие определить сс;и1аден 1е фазного положекия сигнала с cci/ropoM возможного устранения неураг,иоиешениости в предмете для каждой из псследуемых плоскостей.
3. Машина по п. 2, о т л п ч а ю щ а яс я что в нзмери-тельную схему введен переключатель. которыГг при выборе Toir пли nnoii комбипацпи плоскостей уравиовешпвания П1)опзводит одновременное включение соответствующих эти.: плоскостям ппдпкаторов, прерыва-телси, заранее настроенных решатотцпх контуров п часп1табн 1 х устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости движущихся объектов | 1947 |
|
SU78084A1 |
| Двухкаскадный генератор электрических колебаний | 1951 |
|
SU101946A1 |
| Устройство для определения статической составляющей дисбаланса | 1960 |
|
SU139120A1 |
| Электронный измеритель статических деформаций | 1953 |
|
SU102416A1 |
| БИБЛИОТЕКА I | 1972 |
|
SU332402A1 |
| ЭЛЕКТРОИСКРОВОЙ ОТМЕТЧИК ДИСБАЛАНСА И ФОРМИРОВАТЕЛЬ ВРЕМЕНИ РАЗРЯДА | 1992 |
|
RU2075736C1 |
| Импульсный ультразвуковой дефектоскоп | 1954 |
|
SU101412A1 |
| Устройство для тональной модуляции | 1935 |
|
SU48586A1 |
| Устройство для измерений дисбаланса роторов | 1981 |
|
SU1017937A1 |
| Приемник фазомодулированных колебаний | 1937 |
|
SU77502A3 |