Изобретение относится к способам магнитных измерений; проводимых на земной поверхности с целью поиска полезных ископаемых, оконтуривания месторождений, определения глубин залегания и подсчета запасов.
Известный способ магниторазведки базируется на выявлении аномального поля (т. е. поля, созданного намагниченностью искомых объектов геологического и негеологического происхождения), изучении его структуры и пространственного распределения. При измерении напряженности магнитного поля выявление и изучение аномального поля Яа оаложмяется тем, что измерения производятся на фоне значительно большего по величине нормального поля Н„. С помощью магнитометров измеряют суммарное поле
Ях Яц+Яа,
причем непосредственно измеряются либо
компоненты вектора Я , Я, Ну и Я., где X, у, Z оси географической системы координат, либо модуль (Я)Е И два угла а (магнитное склонение) и (3 (магнитное наклонение),
той же cjiCTeSie координат. Информацию об
-
аномальном поле Яд получают через приращения ДЯх; ДЯу и ДЯг, либо через приращения Да и др. Поскольку , то для выявлепия приращений необходимо применять высокочувствительиые индикаторы поля (магнито-механические, феррозондовые и др.) при тщательной, прецизионной нивелировке и
ориентации их относительно стран света.
При из.мерении градиента скалярного магнитного поля выявить и изучить аномалии легче:
Г, „+Га,
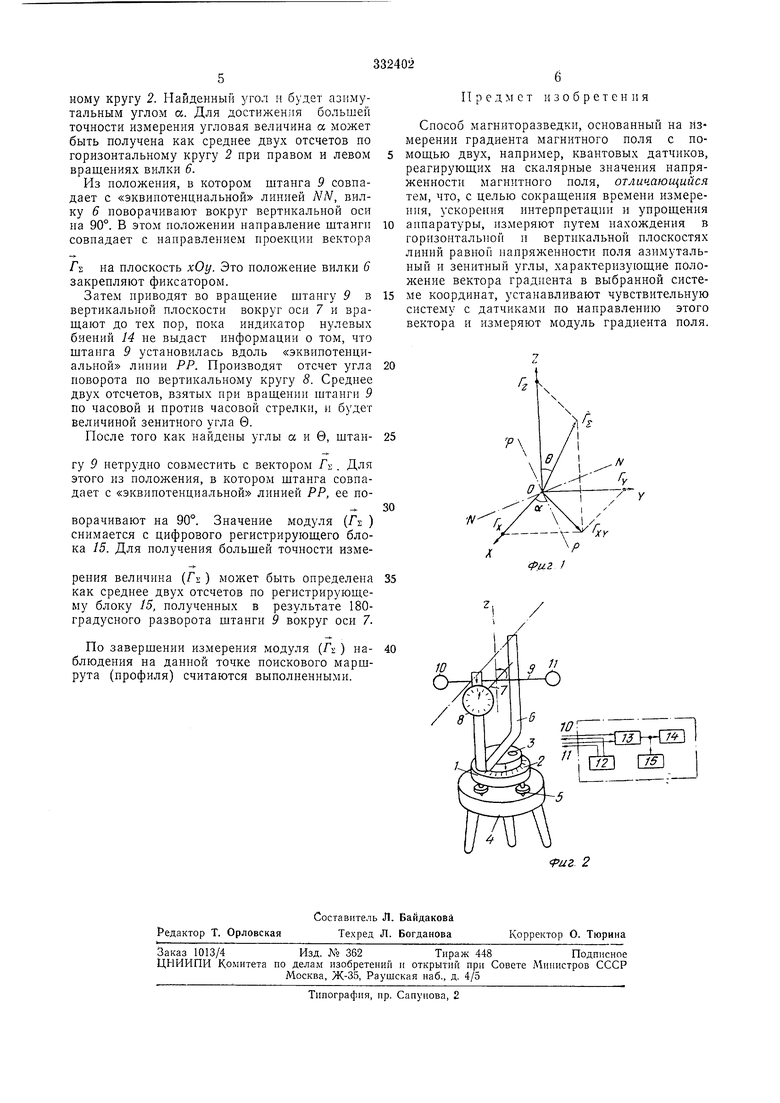
где r,i и Га - соответственно нормальный и аномальный градиенты поля. Как правило, (при работе на железорудных месторождениях ,i). Поэтому хотя для выявления вектора Га необход11 о применять высокочувствительные магнитные градиентометры, но отпадает прецизионная нивелировка и ориентация чувствительных систем этих приборов относительно стран света. Предложенный способ магниторазведки путем нахождения, в горизонтальной и вертикальной нлоскостях линий равной ианряжеиностн магиитного иоля азимутальный и зенитный углы, характеризующие ноложсиие вектора градиента в выбранной енетеме координат, устанавливают чувствительную систему с датчиками но нанравлеиию этого вектора и измеряют модуль градиента ноля. Непосредственное онределеиие нанравлеиия градиента ноля сокраш.ает время наблюдения, унрощает схему н конструкцню градиентометров, позволяет, учитывая, что , нроизводнть экспресс-интернретацию, вплоть до выдачи команд на изменение маршрутов (ходов) в процессе магнитной съемки. На фнг. 1 изображена векторная диаграмма, ноясняющая измеряемые нараметры ос н в; на фиг. 2 показаны основные элементы градиентометра, с помощью которого можно проводить магниторазведку нредложенным способом. Прямоугольная система координат х, у, z (фнг. 1) выбрана таким образом, что нлоскость л:О;/оказывается горизонтальной, а ось г совпадает с вертикалью. Направление оси х устанавливают произвольно, например, оно может совпадать с направлением профиля съемки. Важно, чтобы нанравление оставалось ностояниым .для данного района съемкн и было привязано к географической карте или планшету. В выбранной снсте.ме коордннат ноложение вектора Г-й однозначно определяется с номощью двух углов: азимутального а. (между осью X н проекций Гуу вектора Ts на илоскость хОу) и зенитного в (между осью z н направлением вектора TV). Если углы ее и 9 определены, то магнитную ось чувствительной системы градиеитометра можно ориеитировать но вектору Г--:, и затем измерить модуль этого вектора. Знание модуля (А ) н углов а и в равносильно знанию компонент вектора А . Действительно, Г /д.|А |slnO-cosa , ГУ iy |А IsInO-sina , /.rJlAjcosS, где ix, iy н iz - орты, совпадающие с направлением соответствующих осей координат. С помощью двух датчиков, например квантовых, последовательно находят две взаимно нерненднкулярные «эквипотенциальные линии. Одна из них - линия лежит в гориаонтальной нлоскости хОу другая - линия РР - в вертикальной илоскости, образуемой осью Z и векторОМ TV. NN периеидикулярна вектору Л-t-/, линия РР иериондикулярна вектору А . Поскольку с положение.м вектора Гху связан угол а, а с положением вектора - у1-ол в, нахожденнс лнннй и РР п системе координат х, у, z фактически и сводится к измерению углов а и 8. Заметим, что при размещеннн датчиков градиентометра вдоль линии NN или линии РР частота биений электрических колебаиий, вырабатываемых этими датчиками, стремится к нулю. На фиг. 2 схематически изображены основные элементы градиеитометра, пригодного для измерения углов а и 9, а также модуля (А ). Градиентометр еостонт из чувствительной системы, механически сопряженной с теодолитом, н нульта, электрнчески связываемого с чувствительной системой носредством гибкого кабеля. Чувствительная система базируется на теодолитном столе 1, несущем горизонтальный круг 2 н круговой уровень 3. Теодолитный стол установлен на штативе 4. Нивелировка стола осуществляется с номощью нодъе.мных винтов 5. На подвижной части теодолитного стола закренлена вилка 6 с горизонтальной осью 7, на которую насажен вертикальный круг 5. На оси 7 укреплена штанга 9, несущая на концах датчики 10 и 11, нанрнмер квантовые, преобразующие скалярные значения напряженности магнитного ноля в частоту электрических колебаний. Вилка 6 вместе с подвижной частью теодолитного стола / может поворачиваться вокруг вертикальной оси на 360°. Штаига 9 с укрепленными на ней датчиками может поворачиваться вокруг горизонтальной оси также на 360°. Углы новорота вилкн 6 н штанги 9 отсчитываются по горизонтальному 2 н вертикальному 8 кругам соответственно. Нульт состоит из четырех блоков: генераторного блока 12 - для иитания датчиков 10 н 11, блока 13 - для смешения сигналов, ностуиающих с датчиков, а также для формирования разиостного сигнала с индикатора нулевых биений 14 и цифрового регистрирующего блока 15, с которыми связан блок 13. Носле нивелировки теодолитного стола / и ориентации визирной лннии вилкн 6 но оси X производят нулевой отсчет по горизонтальному кругу 2. С иомощью фиксатора штангу 9 закренляют в горизонтальной нлоскостн. Затем начинают вращать вилку 6 вокруг вертикальной оси z в сторону ноложительного наиравления оси у и вращают до тех нор, нока индикатор нулевых биений 14 не выдаст информации о том, что щтанга 9 установилась вдоль «эквипотенциальной линии NN. Нро
| название | год | авторы | номер документа |
|---|---|---|---|
| Градиентометр | 1980 |
|
SU901952A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| Способ гравиметрической разведки | 1983 |
|
SU1163297A1 |
| Способ геофизической разведки геотермальных месторождений подземных вод | 2024 |
|
RU2840773C1 |
| БИОСЕКРЕТ | 1994 |
|
RU2133048C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2012 |
|
RU2510500C1 |
| СИСТЕМА БУРЕНИЯ ПАРАЛЛЕЛЬНЫХ СКВАЖИН ДЛЯ ПРИМЕНЕНИЙ ПГД | 2013 |
|
RU2613377C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ МАГНИТНОГО СОСТОЯНИЯ ОБЪЕКТОВ | 2021 |
|
RU2759799C1 |
