Иродмстом 1 : 11Г||) яилиется миогоппльнып ) автоматический станок для распиловки тюлек.
lliinecTiibie шиалорезные станки, сна.Пл;онн ло транспортером и дисковыми пилами, расположенными друг на другом па одном основании, не автомат11зирова)1ы. Переналадка нилыгых устройств в зависимости от диаметра 1)азделываемых тюлек производится рабочим, оослулсявающим станок.
111)едлагаемы11 н налоре; ный многопильны1 станок отличается от известных пнало))езных станков тем, что (т снабжен электрическим кома 1доан11арато.ч и запоминающим релейным устропетвом, управляюнио исполнительными механизмами но автоматической переналадке пильных головок в зависимости от диаметра разделываемых тюлек.
Командоаппарат корреспондирует ;japaнее предписанную переналадку подвижных пильных головок, отвечающую напвыгодненншму иснользовапию объема древесины 1)азделываемой тюльки.
На всех суннортах .электропил щналорезного станка установлены следящие прпводы, осун(ествляю1цие переналадку пильпых головок 1 соответствии с положением комаидоаппарата.
Д.тя B03Mo;i;HoiT)r одновременной распиловки на 111нало1)сз1гом станке нескольких тюлек каждое нолоисепио командоаппарата фиксируется запоминающим релейным устройством на все время прохождения через пшалорезный станок, разделываемой тюльки, что обеспечивает требующуюся переналадку пильных головок для разделки тюльки в соответствии с ее диа(Т11(1М.
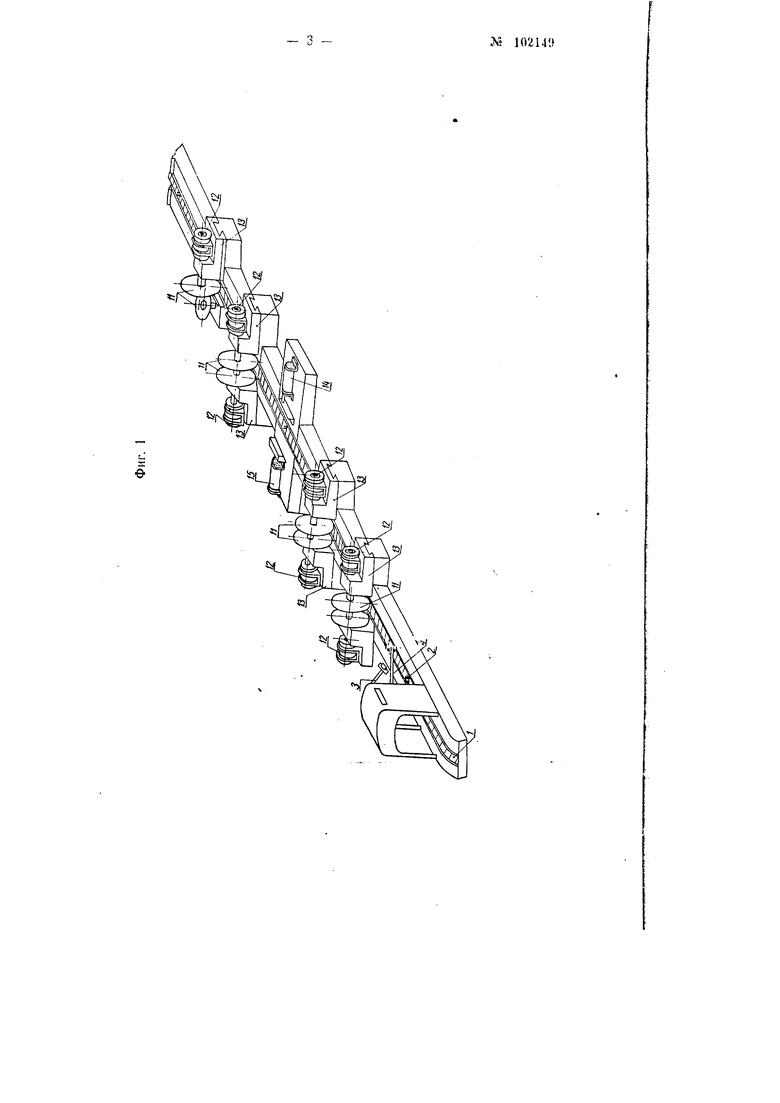
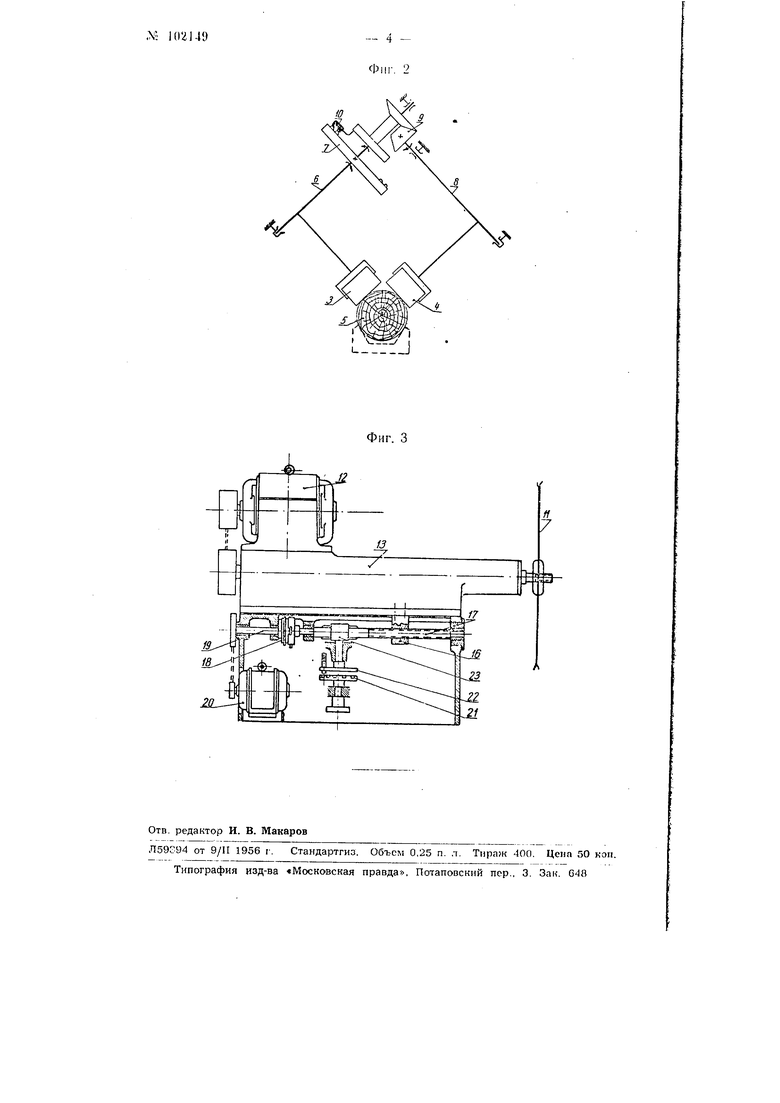
На фиг. 1 показан общий многопильного Н1налорезного автоматического станка; на фнг. 2 - киноматическа) схема рычажных датчиков и командоапиарата; па фпг. 3 - следян1ий 1рииод для переналадки пильной головки.
Разделываемые тюльк1г поступают на транспортер (1) и перемен1аются вместе с лентой транепортера. Под действием залсимного механизма (на чертеже не показан) тюлька плотно заигпмается с тсчцов упорами (2).
Зажатая тюлька подается транспортером (1) к рычажным датчикам (3) i (4), которые устанавливаются в положение, соответствующее измеряемому ими диаметру тюльки.
На фиг. 2 показана кинематическая схема перестановки командоаппарата в зависимости от поворота рыча;1;пых датчиков (3) п (4) на тот или иной угол в соответствии с- диаметром разделывае ой тюльки (5). Датчик (3) новорачивает пал (6), на котором установлен контактный диск (7) командоаппарата. Датчнк (4) поворачивает вал (S) и через коническую шестеренную передачу (9) переставляет щетки (10), скользяи(ие по контактам диска (7).
Контактный диск (7) и щетки (10) вращаются в противополо:кные стороны, что увеличивает точность выбора положения . командоаппарата в зависимоет1 от диаметра тюльки (5).
После установки щетки (10) на контактах диска (7) запоминающее электрическое релейное устройство (на чертеже
НС показпио) фпкгпрупт ппдпниут для данноги диамот), 110.)С1(,чладку 11ИЛ1 иых голонок штгалорс.июго автпмишческо () станка на нсп время i)a;uiMi:ii .faiiiioii
ТЮЛ1.К11.
При поступлении па траисшч р (1) тюлек - BTopoit 11 Ti)eTi,eii - : Мь повто1)Я1отеи операции по пх зажм -. и подаче к рычажпым датчикам (3) и I). НоBwe поло;ке1 ил диска (7) п (10) (|iMi;(npyiiiTiii вторым и третьим лаппминатощим илектричоекими 11елеипыми устропстиами.
Многопильпый пшалорезпып станок CFiafi iceii пятыо-восеммо аильными головками (11) с :-)лектродв ггателями (12), устанавливаемыми па передвижных суппортах (13),
Поворот тюлек иа 90 вокруг их продольиои оси ири раскрое осуиц;ствляотся ,ат(лем, выполнепным в виде двух толкателей (14) п (15). Толкатель (15) опрокидывает тюльку путем иажима па нее выиш центра тянсести, а второй толкатель (bi) возвраи1;ает опрокинутую тюльку па продольный трапснортер (1) для дальнейшей разделкп пильными головками (11). Импульсы тока для срабат)ваиия толкателе поступают от ;ianoMnпаюи сго релейпого устройства.
На фиг. 3 показана конструкция следяв1его привода для переналадки пильных голо1 ок (11). Каждая пильная головка (11) установлена па передвижлом суниорте (13), снабженном маточной гайкой (16), перемещаемой вннтом (17), Электрическая му(1)та (18) осуи1ествляет сцепле.пие 1) (17) с валом (19). Последний ирпводится во враи(еиие реверсивпым элект 1одвигателем (20), направление и)ащения которого определяется полярностью подачи тока к его контактам. Пзмепен1 е паправлепия тока производится ))елейным запоминающим устройством в зависимости от начального пололсепия суппорта (13) перед очередной его переналадкой.
Синфазно с суппортом (13) по неподвпя:но.му коптактпому диску (21) перемещается однооборотная планка (22) со щетками, скользящими по контактам диска (21). При достижении планкой контакта, па который подано папряжение
нлект|)ичееким : апомипаю1цим угтрмистJ OM, |)а1це11ляетс11 му{11та (18) и суии(11)Т {1Л) ос|;|)1авливается в т)ебуемом ио.ю:i;eiiiiH. (и11фа:1пость перемещепия планки (22) о||СС11счи1Тается червячной не1)едачг11 (23).
Предмет изобретения
1.П1налоре:; 1ьп1 станок, гиаб;ке1 пый ирод||Л1:И1)м Т1)анРиортер(И1 д.гя нодачи И1иал1 ной ткмькн н дисковыми ии.юми,
устаНОНЛеИМ,. на ГЮДВИ КПЫХ CylllKij)та, i)acn(i.ii);i:eiiiibix iHiHaiuio и иос.пДииательпо друг за другом на об1цем основании, о т л н ч а 10 щ и и с я тем, чтп, г целью аг.тиматизации ироцесса 11.)Г(1Т1111леппя Н1нал при одновремпииой разде.1ке нескольких тюлек п зависимости от их диаметра, станок спаб;кен электрическим комаидоапиаратом, иосылающнм импульсы тока запоминающему релейному устройству, уп1)авляюи1ему исполнительными механизмами по а1 томатической иереналадке пильнь1х головок.
2.Шиалорез {ый стапок по п. 1, и тл н ч а ю и; j и с я тем, что, е цельго установки ПНЛЫ1ЫХ головок в 11оло,ке11не, обеспечпваю1цее напвыгодпейпип iiacnii.i тюльки, электрический комапдоаипарат выполнен в виде двух располо;кенных нод углом рыча;1;ных датчиков, один из киторых вран1ает диск с контактами, а второй - щеточное устройство в CTniioiiy, противоиоло;кну1о врагцению диска.
3.Шпалорезиый станок по пп. 1 и 2, о т л 1Г ч а ю nut и с я тем, что исиолнительпый механизм в)нолне}1 в виде ходового виита с маточной гайкой и еледяиигм устройством, состо1ицим и;| контактио1-о диска с. одио(|бо1)отиой илаикой. нереме цаюп(ейся сннфазно с Н1ГЛ1)11(1Й головкой и 1рекран1ающей ее передвижение нри достижении однооборотиой илаикой контакта на диске, на который подано напряжение запоминающим релейным устройством.
4.Форма вынолнепия и1иалорезного стапка по пп. 1-3, о т л ч а ю щ а я с я тем, что для поворота тюлькп па 90° вокруг ее продольной оси установлен кантователь, выполненный в виде двух толкателей, получающих и.мпулье тока от запоминаюп1его релейного устройства.
)
Фиг. 2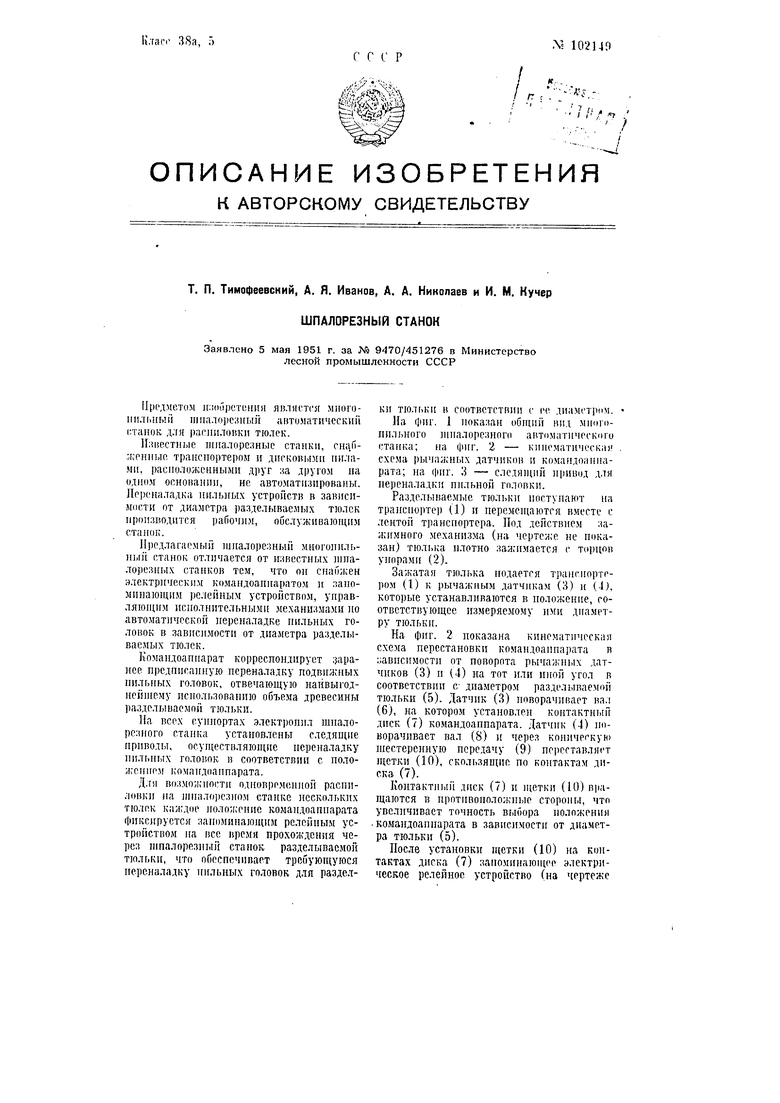
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1959 |
|
SU120781A1 |