Изобретение относится к медицинской технике, а именно к области протезостроения.
Известен механизм поктевсго шарнира содержащий гипьзу предплечья, гильзу
ппеча, соединенные осью вращения покт&вого шарнира, корпус локтевого щарнира, механизм привода локтя, состоящий из тяги, .закрепленной на рамке, установленной на оси вращения локтевого шарнира, и разгружающий механизм, состоящий из .профилированного кулачка, установленного на оси вращения и упругого элемента р Устройство позволяет уменьшить статический момент веса гИльзы предплечья с искусственной кистью относительно оси локтевого шарнира.
Однако величина компенсации статического момента ограничена жесткостью пружины и зависит от профитю кулачка. Увеличением жесткости можно компенсировать вес тяжелых предметов, но в Va- ком случае статический момент веса гил зы предплечья и искусственной кисти перекомпенсируется, при уменьшении жесткости возможно компенсировать частично вес взятых предметов, но тогда инвалиду приходится прикладывать дополнительные усилия на тягу для поднятия и удер жания предметов или самого протеза.
Известен также механизм локтевого шарнира,, содержащий гильзы плеча и предплечья, с локтевой осью, пружинный уравновешивающий узел и проводной узе снабженный электромеханическим приводом 2 Однако это устройство не обеспечивает развития компенсирующего мсмента, , соответствующего весу захваченного предмета.
Цель изобретения - снижение энергозатрат за счет саморегулирования уравновешивающего момента в зависимости от веса захваченного предмета.
Поставленная цель достигается тем, что в механизме локтевого шарнира, содержащем гильзы плеча и предплечья, установленные на локтевой оси, соединенный с гильзами приводной узел, а также пружинный уравновешивающий узеп, установлен переключатель в виде двух пластин, размещенных в гипьзе предплечья и шарнирно соединенных с локтевой осью, и расположенного между пластинами двуплечевого рычага с шарнирвыми звеньями и пружиной, а уравновешввающий узел выполнен в виде фигурной пластины с ушками, имеющими с расположенными в них ограничителями.
трех пружин растяжения, две из которых посредством ушков соединены с гильЗой плеча, а также ролика, кинематическим соединенного с двуплечим рычагом, и троса, один конец которого закреплен в гильзе плеча,а другой - на уравновешивающем узле. Кроме того, приводной узел включает установленный в гильзе предплечья электромеханический привод, кинематически связанный с переключателем, причем выходной элемент привода соединен посредством кривошипа с гильзо плеча.
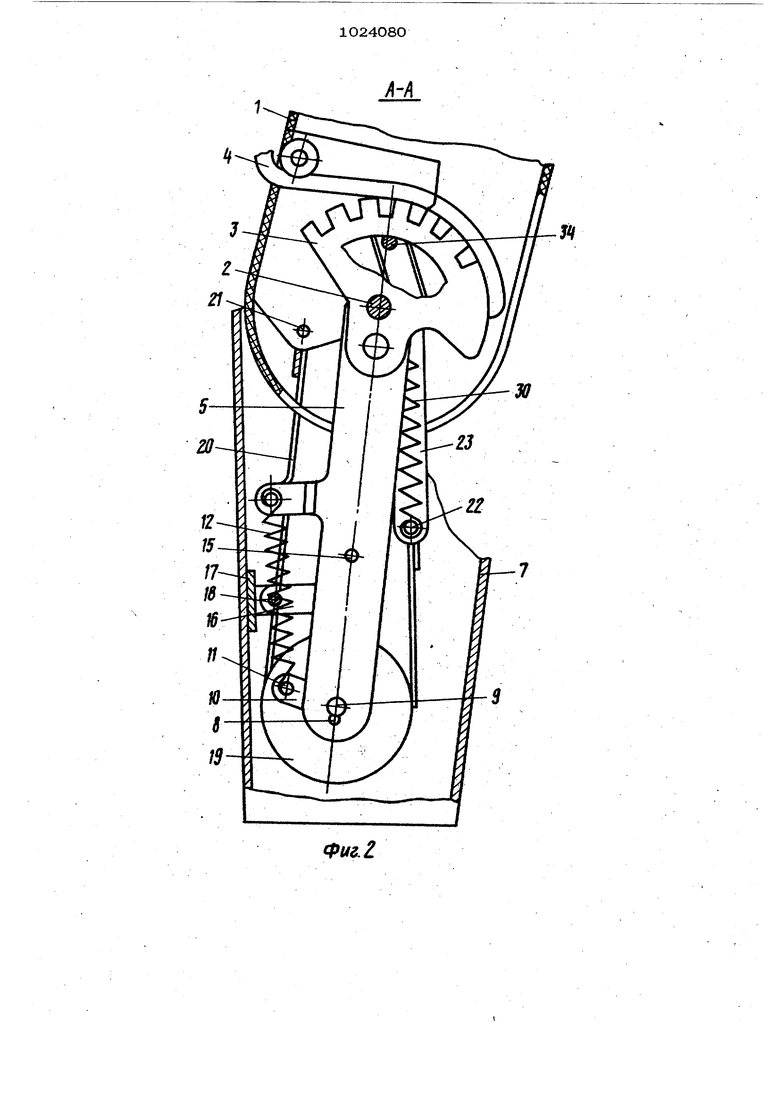
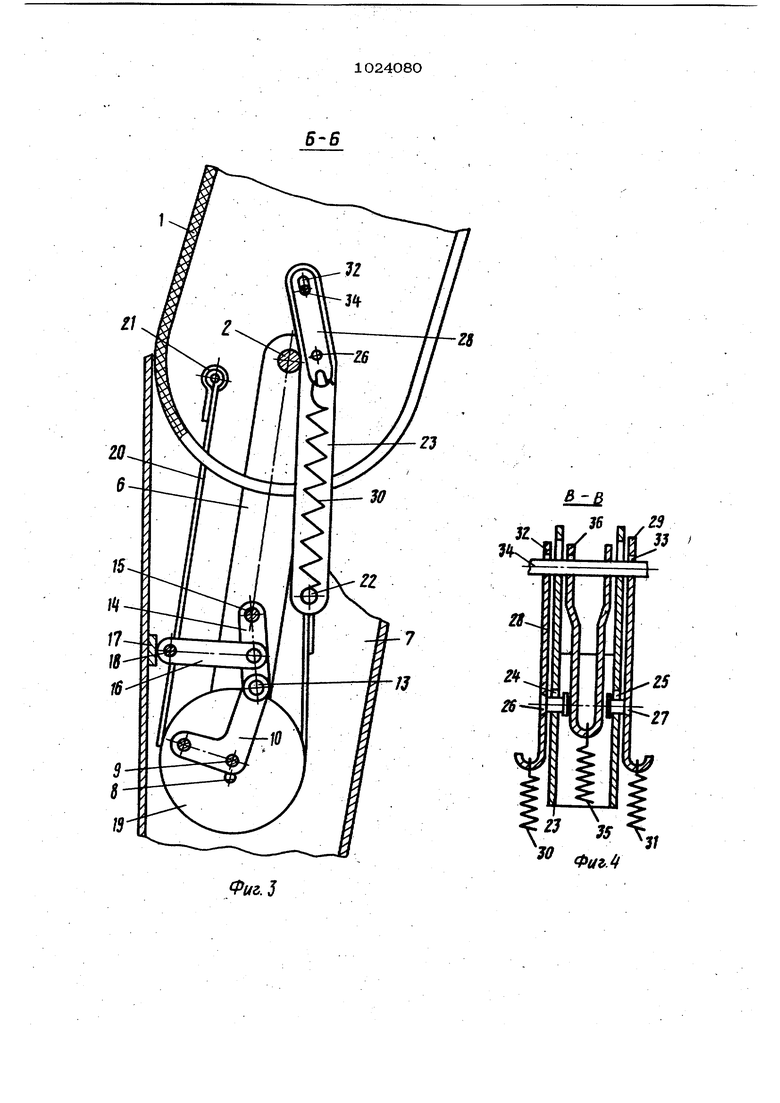
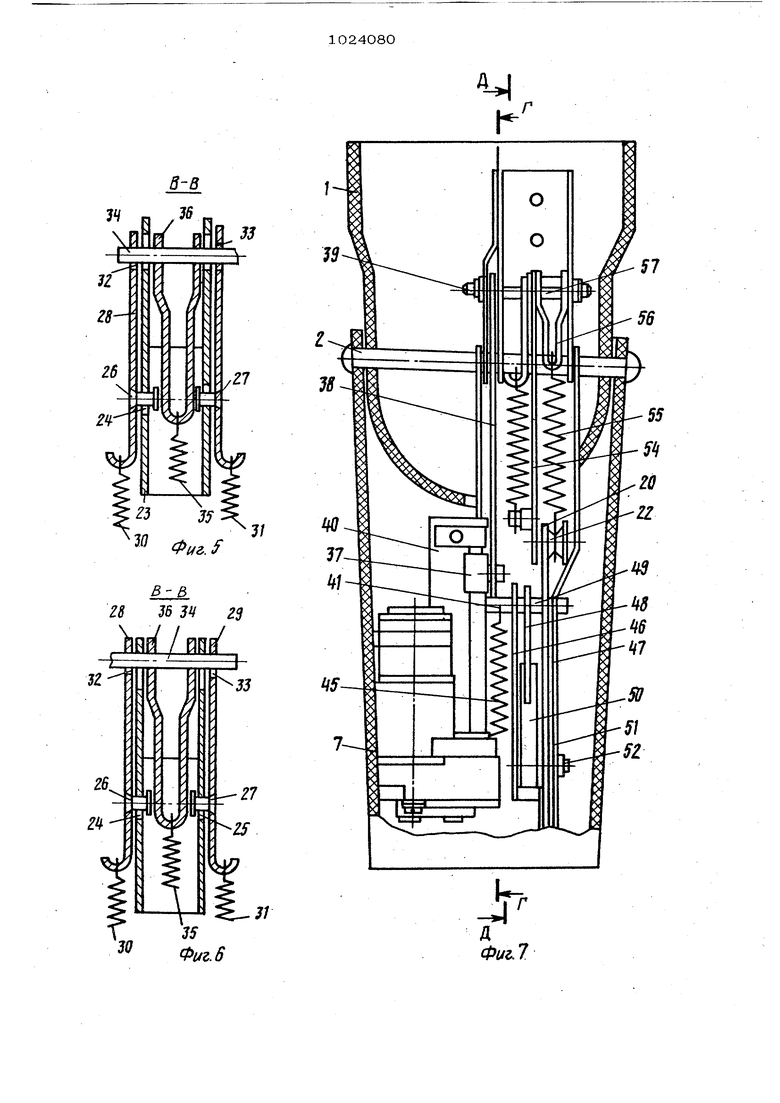
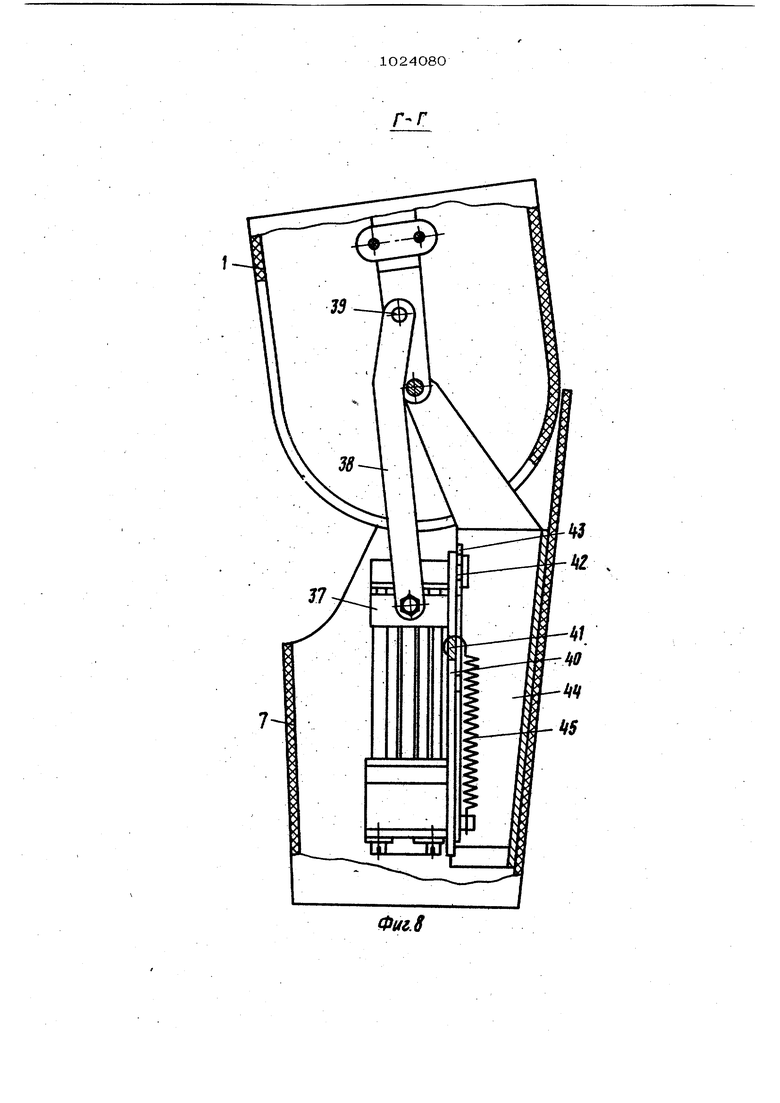
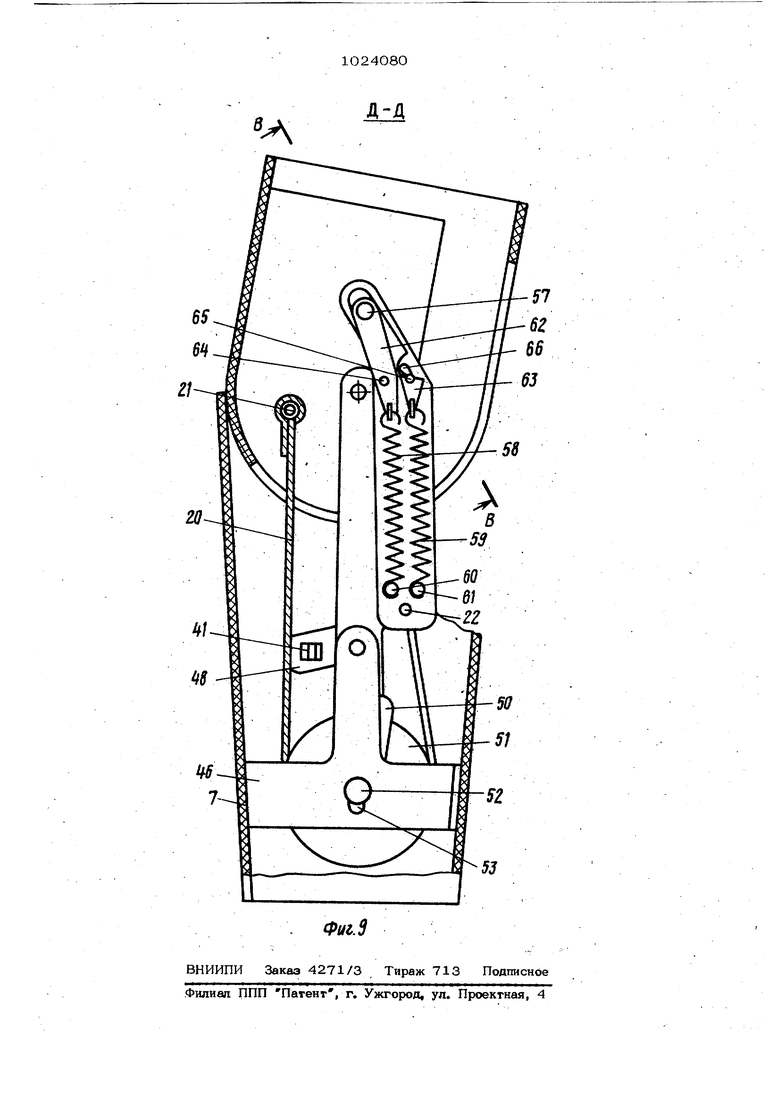
Ни фиг. 1 показан механизм, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение,В-В (включена только пружина уравновешивания диетальной чаоти протеза); на фиг. 5 - сечение В-В (включена первая пружина уравновешивания статического момента поднимаемого предмета); на фиг. 6 - сечение В-В (включены две пружины уравновешивания статического момента поднимаемого предмета); на фиг. 7 - механизм при установке в качестве приводного узла -электромеханического привода, общий вид; на фиг. 8 - сечепие Г-Г на фиг. 7; на фиг.. 9 - сечение D -D на фиг. 7.
В гильзе плеча 1 (фиг. 1-3) на локтевой оси 2 установлен сектор 3 с закрепленной на нем тягой сгибания шарнира 4, которые образуют приводной узел. Сектор 3 неподвижно соединяется с шиной 5. Последняя вместе с шаной 6 я&ляется каркасом, на котором смонтированы переключатель и уравновешивающий механизм, расположенные в гильзе предплечья 7. На шинах 5 и 6 имеются пазы 8 (фиг. 2 и 3) для установки оси 9 с возможностью продольного перемещения. На оси 9 установлен переключатель, состоящий из двуплечего рычага 10с кнопкой 11, на которой закреплена пружина 12, служащая для изменения положения переключателя при уменьшении нагрузки. К двуплечему рычагу 10 посредством оси 13 (фиг. 3) ЙрисоёаиненьГ шарнирные звенья, планка 14, второй конец которой посредством оси 15 подвижно соединен с шинами 5 и 6, и штанга 16, которая посредством крошытейна 17 и оси 18 соединена с гильзой предплечья 7. На оси 9 установлен ролик 19, на котором закреплен трос 2О, один конец которого посредством оси 21 соединен с гильзой плеча 1, второй конец троса с помошью оси 22 соединен с уравновешивающим узлом выполненным в виде фигурной пластины 23 (фнг.1 и 3) с па зами 24 и 25 для крепления ограничитепей 26 и 27, устаиовпенных на ушках 28 и 29 дпя крепления пружин ЗО и 31 Ушки 28 и 29 йосредством пазов 32 и 33 соединены с упором 34, установле ным в гипьзе плеча 1. Кроме того, с фигурной пластиной соединена пружина 35, которая посредством ушка 36 связана с упором 34. При использовании вкачестве приводного узла - элект1Х)механического привода 37 (фиг. 7,8) он устанавпивается в гильзе предплечья 7 и посредством кривошипа 38 и стойки 39 соединен с гильзой плеча 1.Переключатель из пластин 40 с контактным ynojJOM 41 и направляющих стоек 42 (фиг. 8), заходящих в пазы 43 каркаса предплечья 44 З тановленного в гильзе предплечья7. Электроме;Ханический привод установлен на пластине 40, на каркасе предпгючья 44 закреплен один конец Пружишы 45, а второй ее конец закреплен на пластиие 40. Между двумя пластинами 46 и 4 каркаса 44 установлен двуплечий {ялчаг 48, закрепленный на втулке 49 и шар% нирно соединенный с коромыслом 5О, которое соединяется с роликом 51, уста новленным на оси 52, последняя заходит в паз 53 (фиг. 3). На ролике 51 закреп лен трос 2О, который одним концом присоедиМе н к гильзе плеча 1 посредством оси 21, а другой конец троса 20 соединен посредством оси 22 с уравновеши вающим узлом, выполненным в виде фи гурнрй пластины 54 с тремя пазами, закрепленной на ней посредством оси 22 пружины 55 уравновешиванш дистальной части протеза. Второй конец пружины 55 соединен с ушком 56 (фиг. 7), которое установлено в гильзе пг1еча 1 с помощью упора 57. На фигурной плао тине 54 также закреплены пружины 58 и 59 дпя уравновешивания статических моментов, поднимаемых предметов. Эти пружины одними концами закреплены с помощью кнопок 60 и 61 на пластине 54, а другие кониы пружин закреплены на ушках 62 и 63, на их концах также установлены ограничители 64 и 65, которые заходят в пазы 66, фигурной ппао тины 54. Пружины 30,31 или 58,59 ураввовешиваюошх механизмов установлены с предварительным натяжением, которое благодаря ограничителям 26,27 или 64, 65 сохраняется все время. Механизм локтевого шарнира работает следующим образом. В исходном положении, когда локтевой шарнир находится в разогнутом сооТОЯН1Ш и нагрузка на механизм облегчения сгибания в локтевом шарнире отсутствует, двуплечий рычаг 10 и плавка 14 переключателя под действием пру жин 12 посредством штанги 16 и кро№штейна 17 удерживают механизм пере ключателя ближе к задней стенке гвга зы предплечья 7. При натяжении тяги 4 сгибания локтевого шарнира сектор 3 вместе с шинами 5 и 6 поворачивает механизм переключателя вокруг оси 2. Под действием веса дистальной части протеза, который передается посредством кронштейна 17, штанги 16, планки 14 и двуплечего рычага 10, Пружина 12 растягивается, двуплечий рычаг 1О и nnatfка 14 поворачиваются, ось 13 приближается к осевой линии шин 5 и 6, а ось 9 перемещается в пазу 8. Перемещение оси 9 вызывает вдвижение установленного на ней ролика 19. Ролик, в свою очередь. производит натяжение троса 20. Так как один конец троса 2О закреплен на неподвижной оси 21, а второй - на оси 22 фигурной пластины 23, то натяжение троса приводит к перемещению фигурной плао тины 23, что вызывает растяжение пру живы 35, установленной на ушке 36, и ; частичной компенсации веса дистальной части протеза (фиг. 4). При сгибании предплечья с грузом, удерживаемым в кисти, продолжается работа механизма, усиливается натяжение троса 20, фигурная пластина 23 перемещается на большую величину, ушко 28 перемещается вместе с сепаратором до тех пор, пока паз 32 переместится к упору 34. Так как дальше ушко 28 .двигаться не может, то пружина ЗО включается и компенсирует момент поднимаемых предметов (фиг. 5). . Если момент поднимаемых предметов больше, чем способна компенсировать пружина, то под действием этого момента сил, фигурная пластина 23 продолжает движение и паз 33 ушка 29 приближается к упору 34, после чего пружина 31 вступает в действие, компенсируя увеличенный момент веса взятых предметсю, вследствие чего уменьиюется усилие, прилагаемое инвалидом к тяге при сгвва-, НИИ в локтевсял шарнире протеза с предметом в киств (фиг. 6). Разгибание поктеворо шарнира осуществляется за счет недокомпенсированной части веса протеза и взятых предметов, при уменьшении ипи снятия усипия на тяге 4, сгибающей локтевой шарнир. Когда кисть освобождается от предмета фигурная пластина 23 под действие пружин ЗО и 31 сдвигается в сторону упора 34, пружины 30 и 31 включаются, а пружина 35 сокращается только частично, продолжая компенсировать лишь вес диетальной части протеза. При этом двуплечий, рычаг 10 и планка 14 поворачиваются, вслед за этим штанга 16 посредством крошнтейна 17 и оси18 смещает гипьзу предплечья 1 в сторону незначительного сгибания, после чего предплечье можно сгибать и разгибать уже без предмета. В случае установки в приводном узле электромеханического привода работа ме ханизма осуществляется следующим образом. В исходном состоянии пружина 55 своим натяжением уравновешивает статический момент веса дистальной части протеза. При поступлении на электропривод 37 сигнала на сгибание он через кривошип 38 и стойку 39, соединенную с гильзой плеча 1, сгибает предплечье 7 По мере сгибания плечо приложения силы пружины 55 увеличивается. Уравновешивающий момент ее изменяется в той же зависимости, что и момент дистал1- и части протеза. При сгибании предп.ёчья без груза пружина 45 удерживает пластину 40 с упором 41 и направляющие стойки 42 в контакте с нижней частью паза 43 каркаса прспялечья 44. При сгибании локтевого шарнира с грузом пружина 45 .растягивается. Это вызывает сдвиг пластины 4О с упором 41 в сторону верхней части паза 43. Упор 41 под действием момента сил, образована весом груза, поворачивает двуплечий рычаг 48. Через втулку 49 и коромысло 50 движеше передается на ролик 51 (фиг. 9), ось 52 которого перемещается в назу 53. Это вызывает дополнител нов натяжение троса 20, а значит смещ ние фигурной пластины 23, которая раотягивает пружину 55, установленную на оси 22. Растяжение пружины 55 приводит к перемещению ушка 62, на котором размещена пружина 58, благодаря тому, что паз ушка 62 входит в контакт с упо ром 57, ограничитель 64 передвУ1гавтся в паЗ:у 66 и пружина 58 отключается от фигурЕюй пластины 54 и одновременно подключается к упору 57, установленному в гильзе плеча 1 создавая дополнительный момент для сгибания предплечья относительно локтевой оси. Если вес предмета, удерживаемого кистью, не компенсируется уравновешивающей пружиной 58 пружина 45 растягивается больше, чем вызывается сдвиг пластины 4О. и упора 41 до конца паза 43. Упор 41 поворачивает рычаг 48 с коромыслом 50. Ось 52 ролика 51 перемещается дальше По пазу 53, натяжение троса 20 увеличивается, .пружины-55. и 58 дополнительно растягиваются, что приводит к смещению ушка 63 и к подключению пру жины 59, которая еще больше увеличивает момент сил, уравновешивающих вес предмета и дистапьной части предплечья и искусственной кисти. После того, как с взятым предметом производятся необходимые движения и кисть освобождается от предмета, момент сип, действующих на пружины 55,58 и 59 уменьшается, что приводит к их сокращению. Ролик 51 перемещается по пазу 53 в сторону локтевого шарнира, одновременно под действием пружины 45 пластина 4О с упором 41 перемещается в сторону локтевого шарнира, что вызывает поворот двупЛечего рычага 48 и коромысла 50. Сокращения пружины 59 ; гприводит к тому, что ушка 63 посредством ограшгчителя 65 подходит к концу паза 66 фигурной пластинь 54 и прекращает действовать на лрктевой шарнир. Пружина 58 продолжает некоторое время схэкрашаться, пока ограничитель 64 не достигнет конца паза. После этого уравновешивание дистальной части протеза без нагрузки осуществляется пружиной 55, На преодоление статического момента дистальной части протеза и взятого груза работают последовательно три пружины, причем их вклк чение регулируется автоматически в за.висимости от веса предмета, удерживаемого кистью протеза. Их включение в работу требует незначительного хода фигурнсй пластиШ) 54(Ф-1,5 мм) и плаотины 40(3-4). Предлагаемый механизм позволяет производить автоматическое регулирование величины уравновешивания при изменении нагрузки на предплечье (при поднятии предметов различного) веса) за счет поочередного включения уравновешивающих элементов (пружин); обеспечить равномерную нагрузку и незначительное растяжение упругих элементов уравновешивающего механизма; а также снизить потребляемую мощность эпектромехантеского привода без уменьшения грузоподъемности поктевого механизма, что особенно важно в протезировании.
где габариты и вес узлов должны быть ограничены в соотвегствии с антропометрическими возможностями инвалидов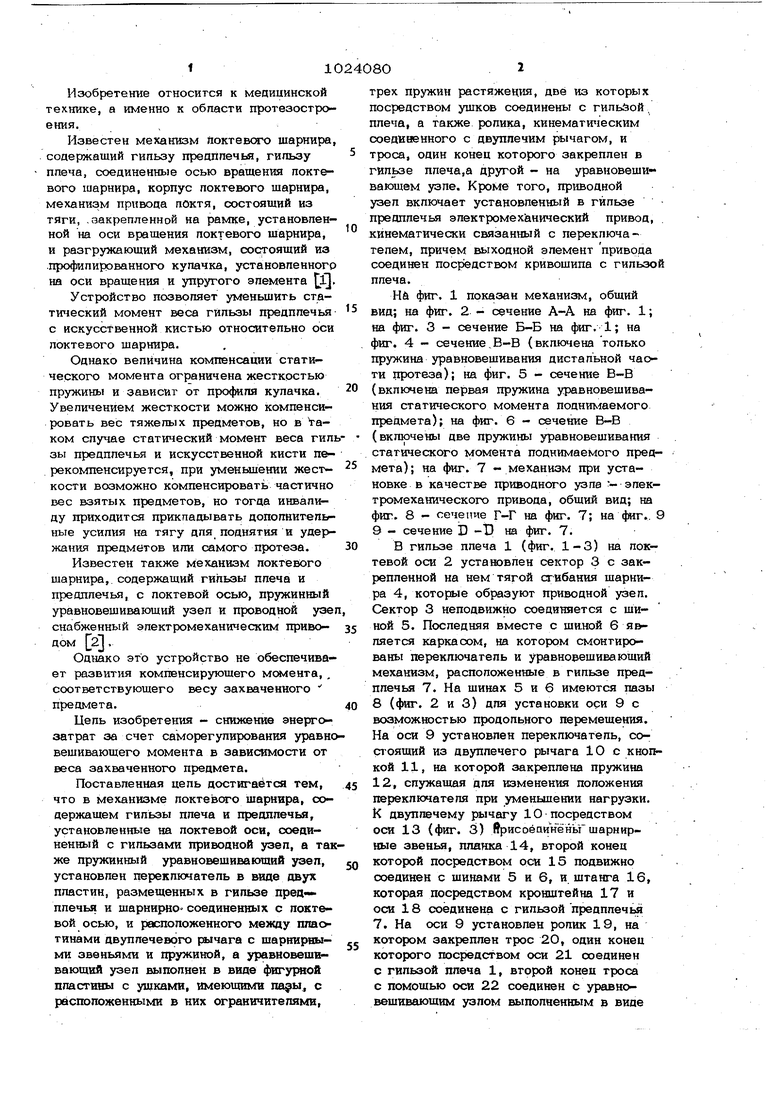
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез предплечья | 1984 |
|
SU1217403A1 |
| Стенд для испытания механизмов протезов верхних конечностей | 1977 |
|
SU626776A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Протез плеча с биоэлектрическим управлением | 1976 |
|
SU604557A1 |
| Механизм локтевого шарнира протеза плеча | 1981 |
|
SU995779A1 |
| ПРОТЕЗ ПЛЕЧА | 2007 |
|
RU2343879C1 |
| Функционально-косметический протез плеча | 1975 |
|
SU543396A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
1. МЕХАНИЗМ ЛОКТЕВОЮ ШАРНИРА, содержащий гильзы плеча и предплечья, установленные на локтевой оси, соединенный с гильзами приводной узел, а также пружинный уравновешивак - , ищи узел, .о уличающийся тем, что, с целью снижения энергозатрат за счет саморегулирования уравновешивающего момента в зависимости от веса за хваченного предмета, в нем установлен перекшочатель в виде двух пластин, размещенных в гильзе предплечья и шарнирно соединенных с локтевой осью,и расположенного между пластинами двуплечего рычага с шарнирными звеньями и пружиной, а уравновешивающий узел выполнен в виде фигурной пластины с ушками, имеющими пазы, с расположенными в них ограничителями, трех пружин растяжения, две из которых посредством ушков соединены с гильзой плеча, а также ролика, кинематически соединенного с двуплечим рычагом, и троса, один конец которого закреплен в гильзе плеча, а другой - на S уравновешивающем узле. 2. Механизм поп. 1, отличаю(Л щий с я тем, что- приводной узел включает установленный в гильзе пред ппечьа электромеханический привод, кинематически связанный с переключателем, причем выходной элемент привода соединен посредством кривошипа с гильзой плеча.
36
19
Фиъ.1
Л
Фиг. 2
Фиъ.З
в-в Bv
33
ЙПЙ
д
Фиг. 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ОБЛЕГЧЕНИЯ СГИБАНИЯ ПРОТЕЗА ПЛЕЧА В ЛОКТЕВОМ ШАРНИРЕ | 0 |
|
SU296570A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Протез плеча | 1978 |
|
SU670302A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
