Изобретение относится к медицине, точнее к протезированию, и может быть использовано при протезировании после ампутации плеча.
Цель изобретения - снижение энергопотребления при одновременном удобстве пользования протезом.
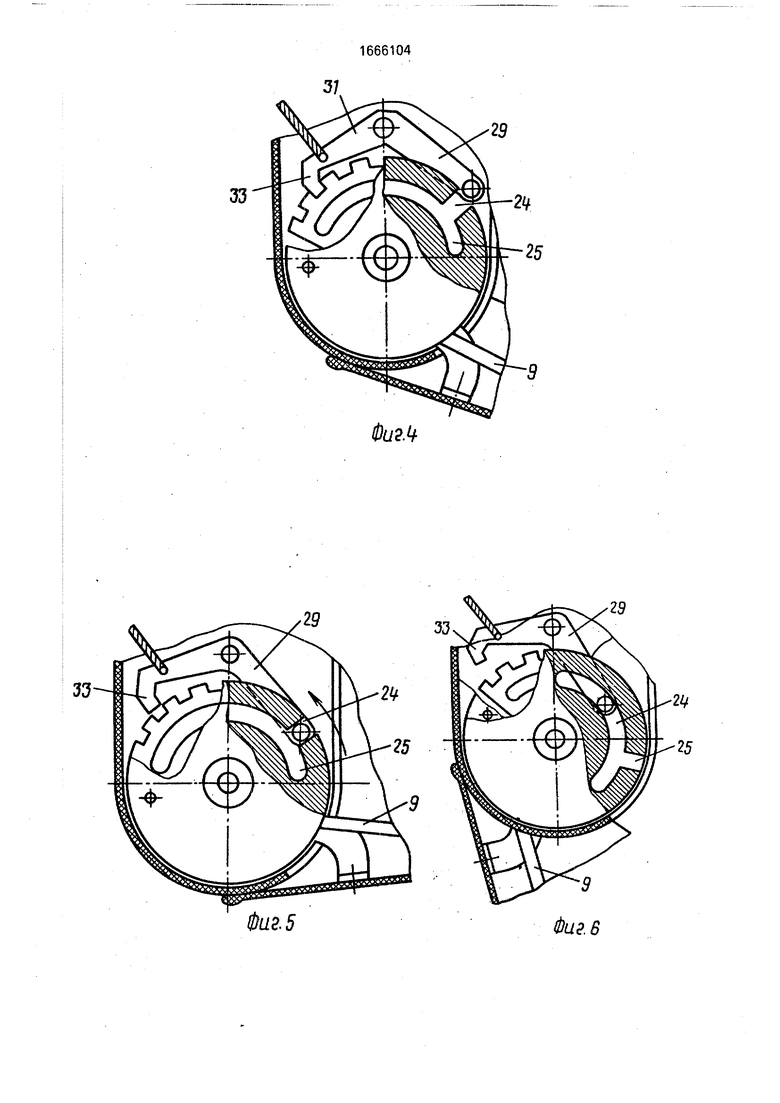
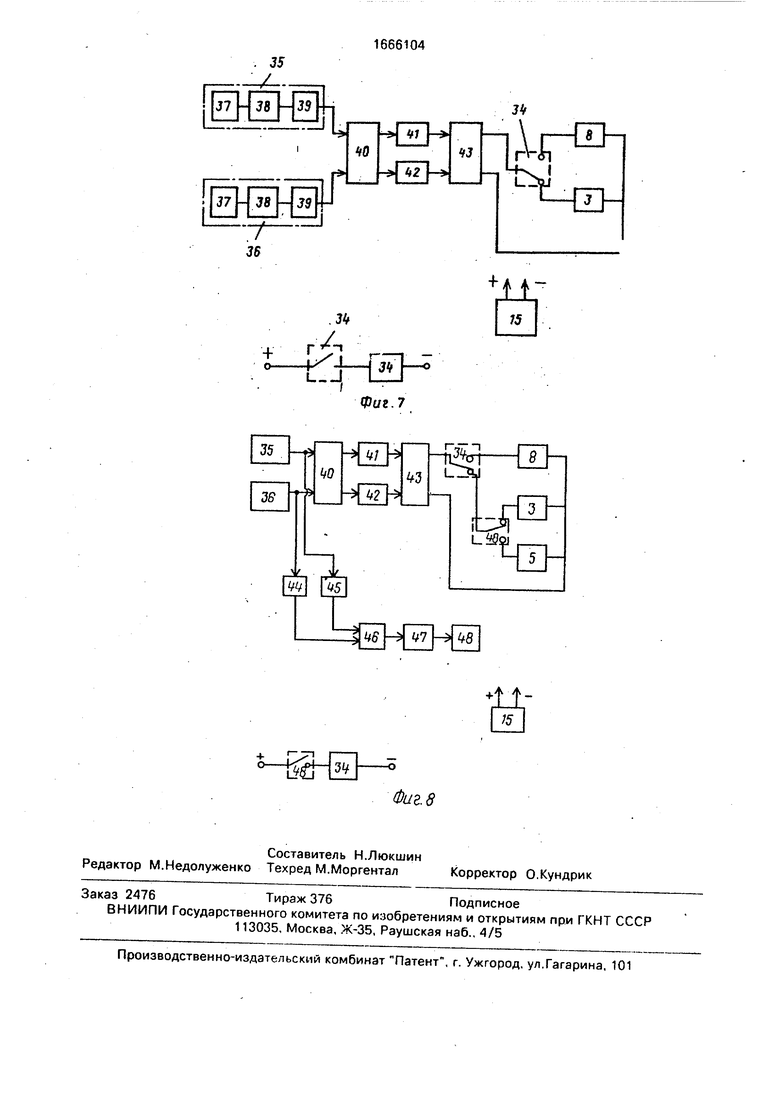
На фиг.1 показан протез плеча, общий вид; на фиг.2 - локтевой узел протеза плеча; на фиг.З - вид слева на фиг,2, разрез; на фиг.4, 6 - три рабочих положения локтевого узла соответственно: жестко фиксированное положение, рабочее положение, положение свободного качания гильзы предплечья, исходное; на фиг,7,8 - блок- схемы системы управления протезом на две и три пары движений соответственно.
Протез плеча содержит искусственную кисть 1, управляющий рычаг 2 искусственной кисти 1, электропривод 3 искусствен ной кисти 1, ротационное кольцо 4 пассивной ротации плеча, электропривод 5 ротации искусственной кисти 1, гильзу предплечья 6, локтевой узел 7, электропривод 8 локтевого узла 7, управляющий рычаг 9 локтевого узла 7, гильзу плеча 10, элементы 11 крепления протеза, тягу 12 с микропереключателем 13, систему 14 управления, установленную в гильзе плеча 10, и выносной источник 15 питания (на 12 В постоянного напряжения). В гильзе предплечья 6 жестко закреплена рамка 16, на которой установлены электропривод 3 искусственной кисти 1 и электропривод 8 локтевого узла 7. Управляющий рычаг 2 искусственной кисти 1 установлен в гильзе предплечья 6 и закреплен между ползуном 17 электропривода 3 и рычажным механизмом 18 искусственной кисти 1, соединяющим блок 19 первого пальца и блок 20 второго пятого пальцев. Управляющий рычаг 9 локтевого узла 7 установлен в гильзе предплечья б и закреплен между ползуном 21 электропривода 8 и упорным диском 22 локтевого узла 7. Локтевой узел 7 выполнен в виде оси 23, на которой установлены упорный диск 22 с пазом 24 для фиксации и кольцевой проточкой 25 и зубчатый сектор 26, который с помощью рычага 27 жестко зафиксирован на гильзе предплечья 6 и кинематически связан с подпружиненной посредством пружины 28 защелкой 29, установленной на оси 30 и выполненной в виде двуплечего рычага 31.
На концах плеч двуплечей защелки 29 размещены боковой упор 32 для фиксации упорного диска 22 и фронтальный упор 33 для фиксации зубчатого сектора 26. На защелке 29 закреплена тяга 12, в разрыве которой установлен микропереключатель 13,
причем контакты последнего соединены с реле 34 системы 14 управления и с одним из полюсов источника 15 питания. В зависимости от потребностей система 14 управления
может реализовать три или две пары движений исполнительных механизмов. При реализации двух пар движений ротация кисти может быть пассивной.
Система 14 управления (фиг. 7и8)вклю0 чает два аналогичных канала 35 и 36 предварительного усиления, выполненных в виде последовательно соединенных электродов 37 съема биопотенциалов, усилителей 38 и детекторов 39, выполненных в виде
5 интеграторов, выход каждого канала 35 и 36 подключен к входу балансного усилителя 40, выполненного на операционном усилителе типа КР140УД12. Выходы балансного усилителя 40 через импульсные преобразователи
0 41 и 42, выполненные в виде мультивибраторов, соединены с усилителем мощности 43, выполненным по мостовой схеме. Для реализации трех пар движений (см. фиг.З). Выходы каналов 35 и 36 предварительного
5 усиления подключены также к входам формирователей импульсов 44 и 45,соответственно выходы которых соединены соответственно с элементом 1/1 46, подключенным к триггеру 47, соединенным с
0 Реле 48.,
При реализации двух пар движений в диагональ мостовой схемы усилителя 43 мощности через контакты реле 34 подключены электропривод 3 искусственной кисти
5 1 и электропривод 8 локтевого узла 7 (фиг.7). При реализации трех пар движений в диагональ мостовой схемы усилителя мощности 43 через контакты реле 34 и 48 подключены электроприводы 3, 5 и 8 соответственно ис0 кусственной кисти 1, ротации и локтевого узла 7.
Система 14 управления в таком протезе может быть выполнена и по другой схеме. Привод 5 ротации встроен в механизм
5 49 ротации и представляет собой один узел, соединенный с гильзой предплечья 6 и кольцом 4 ротации искусственной кисти 1, управляющий рычаг 2 искусственной кисти 1 проведен через паз 50 привода 5 ротации
Q искусственной кисти 1.
Протез используют следующим образом.
Инвалид одевает протез на культю плеча таким образом, чтобы управляющие
е мышцы-антагонисты располагались под электродами 37 съема биопотенциалов. Тяга 12 при этом размещается на плечевом поясе. В исходном состоянии гильза предплечья 6 находится в положении свободного качания. При этом боковой и фронтальный
упоры 32, 33 защелки 29 локтевого узла 7 находятся вне зацепления с зубчатым сектором 26. Механизм локтевого узла 7 полностью расфиксирован. Для выполнения какого-либо движения, например охвата - раскрытия кисти, инвалид включает блок 15 питания. При этом элементы системы 14 управления устанавливаются в исходное состояние, при котором к ней подключен электропривод 3 искусственной кисти 1, При поочередном сокращении мышц культи плеча биосигналы передаются через каналы 35 и 36 предварительного усиления, балансный усилитель 40, один из импульсных преобразователей 41 или 42 на усилитель 43 мощности. В результате осуществляется вращение двигателя электропривода 3 искусственной кисти 1, который через управляющий рычаг 2 приводит в движение рычажный механизм 18 искусственной кисти 1, осуществляя схват или раскрытие пальцев, пропорционально разностному сигналу с управляющих мышц.
Для включения исполнительного механизма локтевого узла 7 при необходимости реализации движения локтем инвалид осуществляет натяжение тяги 12. При этом микропереключатель 13 срабатывает и подключает к источнику 15 питания реле 34, которое срабатывает и контакты его подключают к системе 14 управления электропривод 8 локтевого узла 7. Тем же натяжением тяги 12 приводится в движение защелка 29, которая боковым упором 32 входит в зацепление с пазом 24 упорного диска 22, который фиксируется относительно гильзы плеча 10. При сокращении управляющих мышц плеча разностью биопотенциалов этих мышц инвалид аналогично управлению искусственной кистью проводит пропорциональное управление электроприводом 8 локтевого узла 7, который, перемещая управляющий рычаг 9 локтевого узла 7, приводит в движение гильзу предплечья 6 относительно гильзы плеча 10, т.е. инвалид осуществляет управляемые угловые движения локтевым узлом 7, пропорционально разности биосигналов мышц-антагонистов плеча.
При достижении локтевым узлом 7 заданного положения инвалид отпускает тягу 12. Микропереключатель 13 возвращается в исходное положение и отключает при этом обмотку реле 34. Защелка 29 при этом также пружиной 28 возвращается в исходное положение, боковой упор 32 защелки 29 выходит из зацепления с пазом 24, фронтальный упор 33 входит в зацепление с зубчатым сектором 26, жестко связанным рычагом 27
с гильзой предплечья 6. За счет этого локтевой узел 7 фиксируется, а его электропривод 8 освобождается от нагрузки. В достигнутом положении локтевого узла 7 инвалид может
производить схват - раскрытие пальцев искусственной кисти 1, активную или пассивную ее ротацию и другие пассивные движения протезом. Для возврата локтевого узла 7 в рабочее положение необходимо
0 повторно натянуть тягу 12 и подключить электропривод 8 локтевого узла 7 к системе 14 управления. Сокращая одну из мышц, соответствующую требуемому тянущему или толкающему перемещению механизма
5 локтевого узла 7, инвалид добивается требуемого положения гильзы предплечья 6 относительно гильзы плеча 10 в протезе. Для достижения положения свободного качания протеза (исходного положения) необходимо
0 резко натянуть и сразу же опустить тягу 12. При этом оба упора 32, 33 защелки 29 оказываются вне зацепления и приводят протез в расфиксированное положение.
Для реализации ротации искусственной
5 кисти 1 инвалид производит одновременное сокращение мышц-антагонистов. При этом сигнал с каналов 35 и 36 предварительного усиления поступает на формирователи импульсов 44 и 45i затем через элемент И 46
0 передается на вход триггера 47. который, срабатыв,ая . подключает реле 48. Контакты этого реле подключают к системе 14 управления электропривод ротации 5 искусственной кисти 1. После этого, пооче5 редно сокращая управляющие мышцы, инвалид через систему 14 управления производит управление ротацией искусственной кистью 1 в ту или другую сторону, пропорционально разности биосигналов
0 мышц-антагонистов, аналогично управлению схватом-раскрытием искусственной кистью 1, как описано выше.
Использование микропереключателя 13 с тягой 12 упорного диска 22 с защелкой
5 29, имеющей два плеча с боковым 32 и фронтальным 33 упорами, позволяет с помощью зубчатого сектора 26 фиксировать локтевой узел 7 в достигнутом угловом положении и в момент фиксации отключать
0 электропривод 8 локтевого узла 7. от исполнительного механизма этого узла, что позволяет существенно снизить энергопотребление электроприводом 8 и использовать источник 15 питания меньшей емкости,
е что снижает вес и габариты протеза плеча. Кроме того, такое конструктивное решение локтевого узла 7 позволяет зафиксировать его в любом нужном для инвалида положении, т.е. функциональность протеза плеча повышается. Использование управляющих
рычагов 2,9 для приведения в даижение исполнительных механизмов искусственной кисти 1 и локтевого узла 7 позволяет электроприводы 3,8 этих механизмов жестко закрепить на рамке 16 в гильзе предплечья 8 и сместить тем самым центр масс к оси 23 локтевого узла 7. Все это позволяет в 2-3 раза экономить электроэнергию источника питания 15, т.к. силовые затраты нз угловые перемещений гильзы предплечья б требуются меньше из-за уменьшения плеча приложения сил сопротивления. Кроме того, смещение, центра масс улучшает удобство пользования протезом, так. как из-за уменьшения упомянутого плеча уменьшается общая нагрузка на культю.
Использование тяги 12 для управления локтевым узлом 7 облегчает перевод инвалида с тягового протеза на биоэлектрический за счет снижения нагрузки на тягу 12: для управления тяговым протезом необходимо усилие 10-15 кг, для управления описанным протезом - 2-3 кг, что очень важно для инвалидов, длительно пользовавшихся тяговым протезом.
Таким образом,предлагаемый протез, обладая существенно уменьшенным энергопотреблением, позволяет использовать при управлении только один источник 15 питания, повысить удобство пользования протезом, повысить функциональность угловых движений локтевого узла 7, снизить вес и габариты источника 15 питания, а значит и протеза. Такой протез плеча позволяет повысить уровень социально трудовой реабилитации инвалидов с высокими ампутациями верхних конечностей,
Формула изобретения
Протез плеча, содержащий искусственную кисть с электроприводом и рычажным механизмом, электроприводы ротации и локтевого узла, установленные в гильзе предплечья шарнирно посредством локтевого узла с осью, соединенной с гильзой плеча, систему управления с блоком питания и элементы крепления, отличающийся тем, что, с целью снижения энергопотребления при одновременном удобстве пользования протезом, в него введены два управляющих рычага, реле коммутации электроприводов, установленное в системе управления, и связанная одним концом с элементами крепления тяга с микропереключателем, контакты которого соединены с реле коммутации электроприводов, при этом локтевой узел выполнен в виде подвижно размещенных на его оси упорного диска с пазом и кольцевой проточкой и зубчатого сектора, жестко связанного с гильзой предплечья, а также шарнирно
установленной в гильзе плеча подпружиненной двуплечей защелки с расположенными на ее плечах фронтальным и боковым упорами, кинематически связанными соответственно с упорным диском и зубчатым
сектором, причем электропривод локтевого узла посредством одного из управляющих рычагов шарнирно соединен с упорным диском, другой управляющий рычаг размещен между электроприводом искусственной кисти и ее рычажным механизмом, а второй конец тяги закреплен на плече защелки, снабженном фронтальным упором.
.29
Фаг 2
29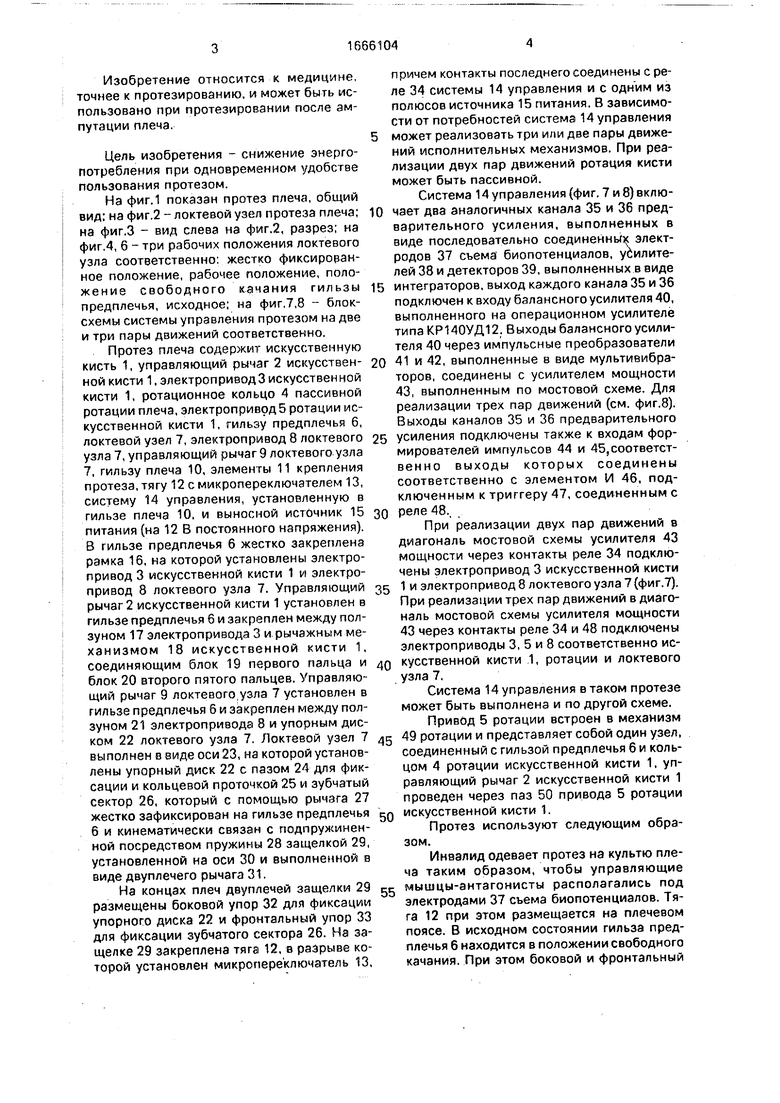
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез плеча | 1989 |
|
SU1732967A1 |
| Протез верхней конечности | 1988 |
|
SU1627172A1 |
| Многофункциональный активный протез руки | 1981 |
|
SU1009456A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| Протез предплечья на расщепленную культю | 1988 |
|
SU1724209A1 |
| Протез руки | 1989 |
|
SU1727824A1 |
| Протез плеча | 1977 |
|
SU707582A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
Изобретение относится к медицине, точнее к протезированию и протезостроению. Цель - снижение энергопотребления при пользовании протезом. Протез плеча содержит искусственную кисть 1 с электроприводом 3, электропривод ротации 5, электропривод 8 локтевого узла, гильзу предплечья 6, локтевой узел 7, гильзу плеча 10, систему управления 14 протезом, элементы крепления 11 и выносной блок питания 15. При этом в гильзу предплечья 6 введены управляющие рычаги 2, 9 искусственной кисти 1 и локтевого узла 7, установленные между исполнительными органами и соответствующими электроприводами, и рамка 16, на которой закреплены электроприводы 3, 8 искусственной кисти и локтевого узла, соответственно. Локтевой узел 7 выполнен в виде установленных на его оси 23 упорного диска 22 с пазом 24 и кольцевой проточкой 25, зубчатого сектора 26, жестко связанного с гильзой предплечья 6 и подпружиненной защелки 29, выполненной в виде двуплечего рычага с двумя упорами на концах - фронтальным 33 и боковым 32, установленной на оси 30 гильзы плеча 10. Упорный диск 22 через управляющий рычаг 9 шарнирно связан с электроприводом 8 локтевого узла 7. На защелке 29 закреплена тяга 12 с микропереключателем 13, контакты которого соединены с реле коммутации электроприводов в системе управления 14. 8 ил.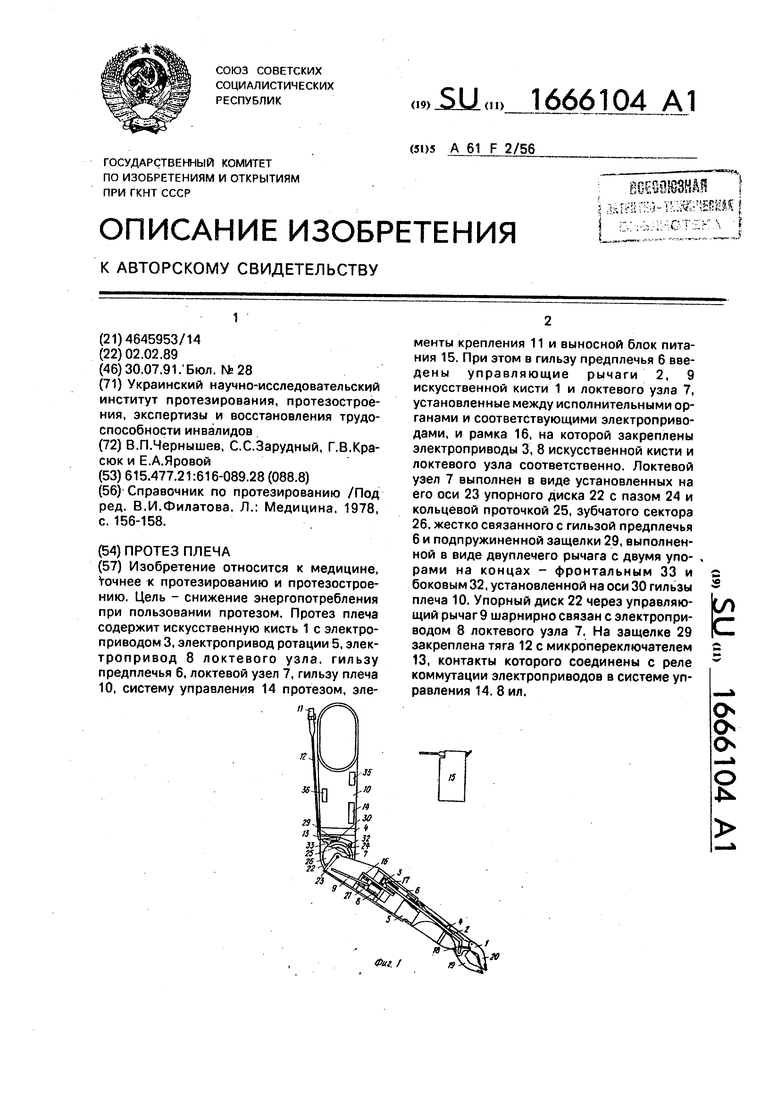
Фаз. 5
ФигМ
29
J
75
Фиг. 7
1115
| Справочник по протезированию /Под ред | |||
| В.И.Филатова | |||
| Л.: Медицина, 1978, с | |||
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
