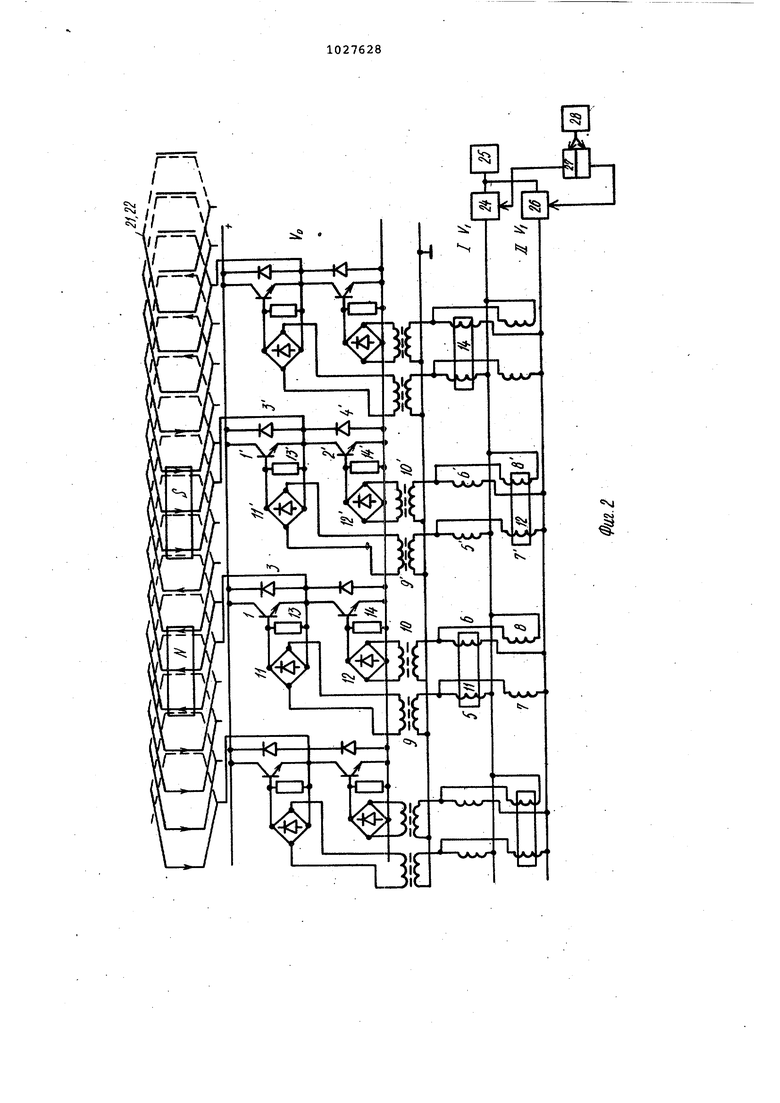
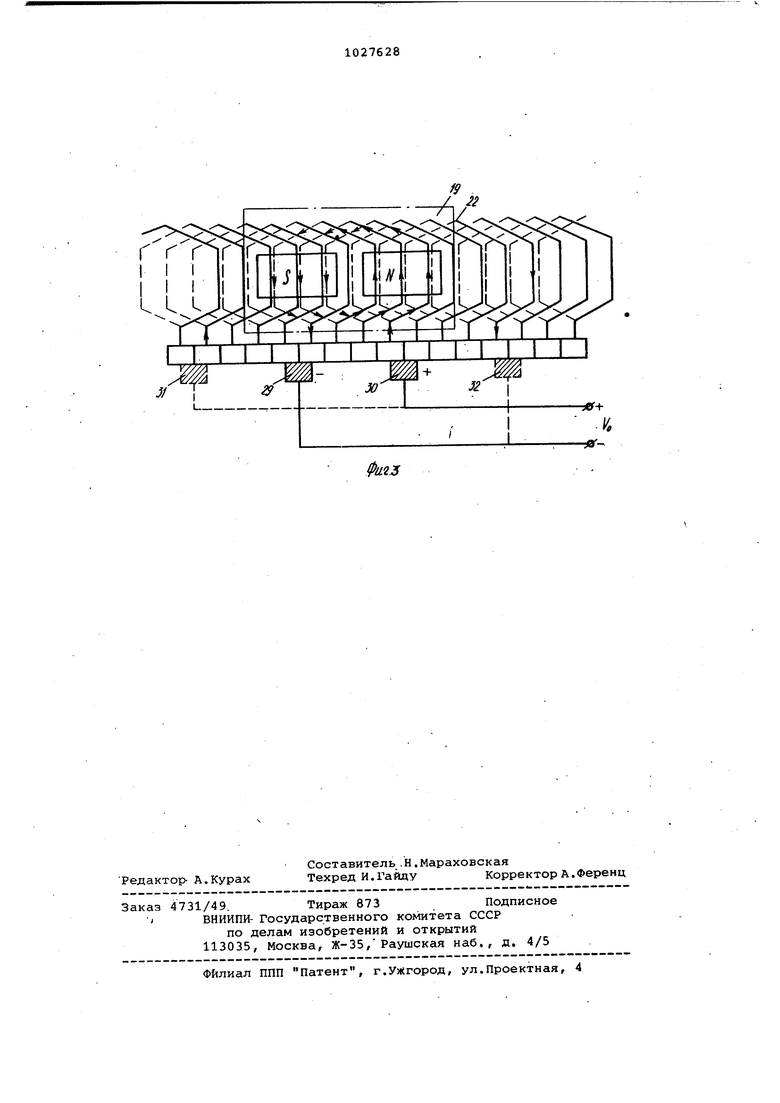
Изобретение относится к технике испытаний и калибровки и может быт использовано для воспроизведения заданных законов изменения линейны ускорений. Известные устройства с приводом от электродвигателей имеют невысокую точность воспроизведения закон изменения ускорения из-за наличия динамических возмущений от упругих деформаций, сил трения и нагрева Поэтому широкое применение находят стенды с линейными двигателями постоянного тока, которые позволяют исключить кинематические цепи, преобразующие вращательное движение электродвигателей .в поступательное перемещение испытательного стола. В этом случае удается исключить упругие деформации и люфты, которые характерны для кинематических цепей указанных аналогов, и получить высокие точности воспроизведения пара метров поступательного движения . Наиболее близким по технической сущности к предлагаемому является стенд, содержащий испытательный стол, подвижный индуктор, с постоянными магнитами и шунтами по нейтралям полюсов, станину с якорными-об мот.ками и бесконтактный коммутатор включающий в себя два ряда датчиков положения якорной обмотки. В извест ном стенде используется линейный двигатель постоянного тока с полупр водниковым коммутатором. Повышенная точность работы стенда достигается тем, что индуктор машины, содержащи |постоянные магниты и шунты по нейтралям полюсов, выполнен подвижным, а обмотка якоря размещена на .станине. При этом под напряжением находится только та часть якорной обмотки, над которой расположен индуктор, что приводит к уменьшению тепловых потерь энергии и снижает нагрев станины. Бесконтактный комму татор исключает возмущения, связанные с механическим взаимодействием подвижных щеток и неподвижного коллектора С 21. Основным недостатком прототипа является неполное использование обмотки, расположенной под индуктором и, как следствие этого, снижение ве личины воспроизводимых предельных ускорений.. Это вызвано тем, что ма нитные шунты, переключающие секции якорной обмотки, расположены на ней ралях полюсов подвижного индуктора и запитывают только те секции якорной обмотки, которые электрически связаны с ними и размещены между магнитными шунтами. Поэтому часть якорной обмотки, расположенная под крайними полюсами индуктора (верхний или нижний ее слой) отключена от источника питания.в силу разомкнутого характера обмотки по торцам. Цель изобретения - расширение диапазона воспроизводимых ускорений. Поставленная цель достигается тем, что в стенде линейных ускорений, содержащем испытательный стол, подвижный индуктор с постоянными магнитами и шунтами по нейтралям полюсов, станину с якорными обмотками и бесконтактный коммутатор, включающий в себя два ряда датчиков положения якорных обмоток, в индуктор введены дополнительные магнитные шунты, вынесенные на одно полюсное деление за пределы крайних полюсов индуктора по ходу стенда и установленные над вторым рядом датчиков положения по отношению к основному магнитн®му шунту. На фигь 1 представлена конструктивная схема предлагаемого стенда линейных ускорений/ на фиг, 2 электрическая схема коммутатораJ на фиг. 3 - электрическая схема питания обмотки якоря при работе полупроводникового коммутатора. Каждая секция якорной обмотки переключаемся полупроводниковым коммутатором, в ячейке которого содержатся транзисторы 1 и 2, обратные диоды 3 и 4, индуктивные датчики 5-8 положения, расположенные в два ряда вдоль якорной обмотки, импульсные трансформаторы 9 и 10, выпрямительные мосты 11 и 12 и резисторы 13 и 14. Магнитные шунты северного 15 и 1ЮЖНОГО 16 полюсов размещены на геометрической нейтрали полюсов и осуществляют коммутацию-секций якорной обмотки. Каждый из этих шунтов движется по соответствующему ряду датчиков положения. Дополнительные магнитные шунты северного 17 и южного 18 полюсов вынесены по ходу движения на одно полюсное деление и размещены над вторым по отношению к основному шунту рядом датчиков положения. Индуктор 19 перемещается по направляющей 20. Якорные обмотки 21 и 22 размещены вдоль хода машины на станине 23, .Каждая ячейка коммутатора состоит из транзисторного ключа, образованного последовательным соединением транзисторов 1 и 2 и шунтированных диодов 3 и 4, индуктивных датчиков 5-8 положения, развязывающих трансформаторов 9 и 10, Датчики положения размещены в два ряда вДоль якорной обмотки, причем над первым рядом расположен магнитный шунт 15 северного полюса, над вторым рядом магнитный шунт 16 южного полюса. Обмотка датчиков 5 и 7 положения соединены через развязызакяций трансформатор 9 и выпрямитель 11 с базой транзистора 1. Обмотки датчиков б и 8 положения соединены через развязывающий трансформатор 10 и выпрямитель 12 с базой транзистора 2, Для обеспечения надежного закрытия транзистора коммутатора при отсутст ВИИ сигнала с датчиков положения Эходиые выводы транзисторов шунтированы резисторами 13 и 14. Питается двигатель от источника питания постоянного тока Уд .Датчики 5 и 8 положения через ключ 24 подключают к генератору 25 прямоугольных импульсов, а датчики б и 7 положения чере ключ 26 подключают к генератору 25 прямоугольных импульсов. Вторые вхо ды ключей 24 и 26 прис оединены к противофазным выходам триггера 27, на вход которого подают управляющий сигнал задакнцего устройства 28. Стенд линейных ускорений работает следующим образом. При положительном сигнале управления на выходе заДанхцего блока 28 (фиг. 2) триггер 27 переходит в пер вое устойчивое состояние. Высокий выходной потенциал, снимаемый с вер него плеча триггера 27, открывает ключ 24 и присоединяет обомотки соответствующих датчиков положения пе вого и второго ряда.к генератору 25 импульсов. Вторая шина питания- при этом обесточена. Магнитный шунт 15 северного полюса насьадает сердечник индуктивного датчика 5 и подводит напряжение генератора 25 к первичной обмотке трансформатора 9. Соответственно на выходе этого трансфор матора появляется напряжение, которое после выпрямления в диодном мос ту 11 открывает транзистор 1. Одновременно магнитный шунт 16 южного : полюса насьядает серделник датчика 8 положения и подводит напряжение генератора 25 к первичной обмотке трансформатора 10. Выходное напряже ние трансформатора Ю через выпрями тель 12 открывает транзистор 2 и подключает обмотку 22 (21) якоря к минусу источникапитания Up. Аналогично работай-.догголнительные магнитные шунты 17 и 18 северного и южного полюсов, которые откр вают соответственно нижний и верхни транзисторы своих ячеек. Образуются две параллельные ветви, по которым течет ток от источника питания, и создается движущая сила. По мере перемещения индуктора магнитные шунты 15-18 включают другие датчики положения первого и второго ряда. осуществляя при этом поочередную коммутацию секций якорной обмотки. При отрицательном сигнале управления на выходе заданяцего блока 28 . триггер 27 переходит во второе устойчивое состояние, ключ 24 закрывается, а ключ 26 открывается. В этом случае включаются в работу датчики б , 7 и б и 7 положения, которые питаются от генератора 25 прямоугольных импульсов через ключ 26, По описанной последовательности открываются транзисторы 2 и 1 от основных магнитных шунтов 15 и 16. и соответствующие транзисторы от дополнительных магнитных шунтов 17 и 18. Вновь образуются две параллельные ветви, включенные к противоположным зажи-. мам.источника питания. Через секции якорной обмотки течет ток противоположного направления и появляется движущая сила, пе эемещающая индуктор в обратном направлении. Регулировать скорость движения индуктора можно изменением величины напряжения VQ. Направление движения определяют полярностью сигнала задающего блока 28. Открытые транзисторы условно обозначены щетками 29 и 30 соответствующей полярности (фиг. 3). Под полюсами индуктора 19 под напряжением оказывается только часть якорной обмотки 22, соответственно верх.ний и нижний слой двухслойной, обмотки. Это положение сохраняется при многополюсном индукторе, когда под крайними полюсами запитан только один слой обмоток в промежутке между крайними полюсами (средние полюса под напряжением окаэываются оба слоя обмоток. На этом же рисунке пунктиром показаны дополнительные щетки 31 и 32, вынесенные за пределы индуктора 19 на одно полюсное деление по отношению к основным щеткам 29 и 30. С учетом действия дополнительных щеток 31 и 32 под напряжением оказываются оба слоя якорной обмотки 22, т.е. часть якорной обмотки 22, расположенная под крайними . полюсами индуктора 19, формирует полное тяговое усилие. Таким образом, введение дополнительных магнитных шунтов и вынесение их на одно полюсное деление позволяет существенно (практически в 2 раза) увеличить тяговое усилие индуктора и при прочих равных уело- . ВИЯХ во столько же раз увеличить амлитуду -воспроизводимых стендом линейных ускорений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд линейных ускорений | 1973 |
|
SU451952A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2022 |
|
RU2799810C1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Линейный электрический двигатель | 1984 |
|
SU1179494A1 |
| Вентильный электродвигатель | 1978 |
|
SU785929A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2453968C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВЕНТИЛЬНОЙ КОММУТАЦИЕЙ | 1973 |
|
SU405158A1 |
| Вентильный электродвигатель | 1974 |
|
SU674164A1 |
| Дугостаторный электропривод винтового пресса | 1981 |
|
SU1027055A1 |
СТЕНД ЛИНЕЙНЫХ УСКОРЕНИЙ, содержащий испытательный стол, подвижный индуктор с постоянными магнитами и шунтами по нейтралям полюсов, станину с якорными обмотками и бесконтактный кою утатор, включающий в себя два ряда датчиков положения якорной обмотки, отличающийс я тем, что, с целью расширения диапазона воспроизводимых ускорений, в индуктор введены дополнительные магнитные шунты, вынесенные на одно полюсное деление за пределы крайних полюсов индуктора по ходу стенда и установленные над вторым рядом датчиков положения по отношению к магнитному шунту.§
| i | |||
| Смольников К.Г | |||
| и др | |||
| Градуировка угловых акселерометров с использованием в.ариаторов скорости | |||
| „ Сб.Исследование параметров движения | |||
| Труда метрологических институтов СССР | |||
| Вып | |||
| Способ подпочвенного орошения с применением труб | 1921 |
|
SU139A1 |
| ПЕЧНОЙ ЖЕЛЕЗНЫЙ РУКАВ (ТРУБА) | 1920 |
|
SU199A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стенд линейных ускорений | 1973 |
|
SU451952A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
