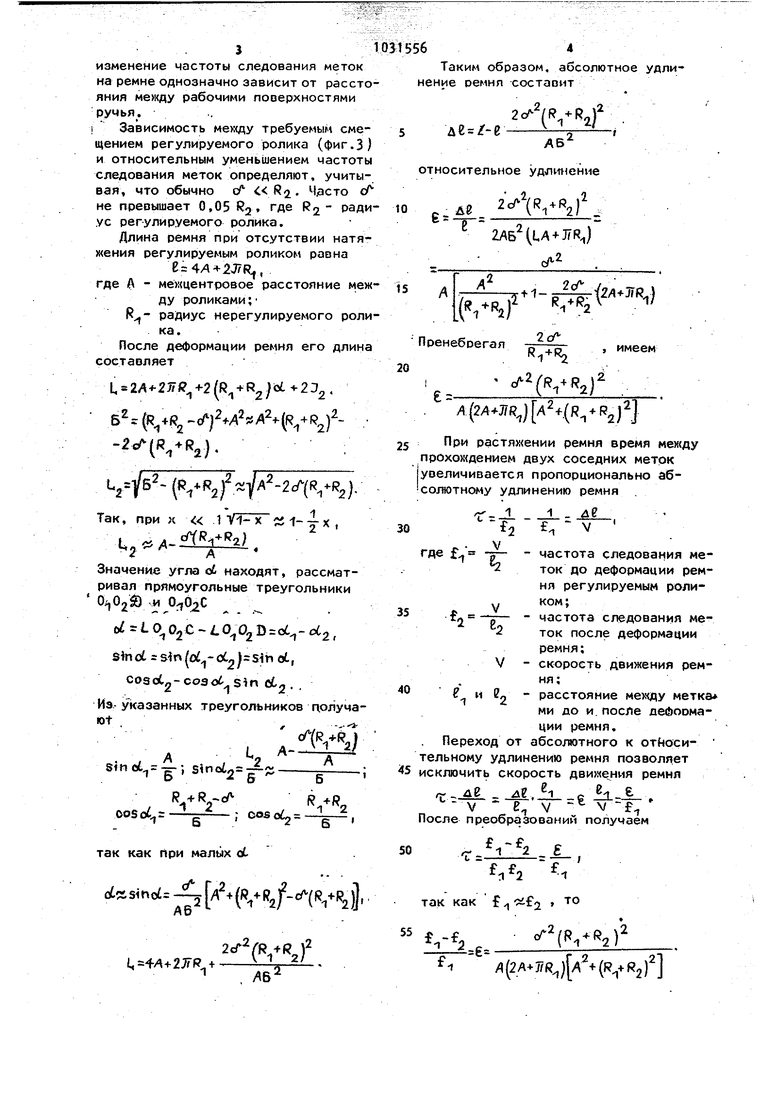
Изобретение относится.к черной м таллургии, а именно к прокатному пр изводству. Известен способ настройки роликов правильной машины, при котором устанавливают между роликами гибкую ленту, перемещают регулируемые роли ки в направлении, перпендикулярном оси подачи заготовки, и определяют расстояние рабочими поверхнос тями роликов, расположенных в разных рядах Cl JНедостатком известного способа является необходимость пробных пропусков, что снихчает производительность машины и точность ее настройки. Цель изобретения - повышение точ ности и производитeльнocт f настройки.. Поставленная цель достигается те что согласна способу настройки роли ков правильной машины, при котором устанавливают между роликами гибкую ленту, перемещают регулируемые роли ки в направлении, перпендикулярном оси подачи заготовки, и определяют расстояние между рабочими поверхнос тями роликов, расположенных в разны рядах, на эластичную ленту наносят метки, а расстояние мекоду роликами определяют по величине относительно уменьшения частоты следования меток при вращении роликов с постоянной скоростью, при :этом относительное уменьшение частоты следования меток на ленте определяют по зависимости (R.RJV A()A( где f - исходная частота следования меток, 1/с; 2 частота следования меток после настройки машины, 1/с; сЛ - требуемое уменьшение расстояния между рабочими пове ностями роликов, мм; R - радиус рабочей поверхности нихтего ролика в месте захвата, мм; Й2 рэдиус рабочей поверхности верхнего ролика в месте захпата, мм; А - ме ; центровое расстояние меж ду роликами, мм. На фиг. 1 изображено устройство для осуществления предлагаемого способа на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 схема, показывающая связь мехщу смещением рабочей поверхности ручья регулируемого ролика и удлинением ремня, установленного на нерегулируемых роликах. Устройство содержит эластичный ремень 1 с нанесенными на нем метками 2. Ремень натянут на пару нижних нерегулируемых роликов 3 и растягивается верхним регулируемым роликом 4. Ролики сортоправильной машины имеют два ручья; между рабочими поверхностями первого ручья, образованного поверхностями 5 и 6 роликов, проходит эластичный ремень 1 или х{е сортовой прокат в процессе правки. Тре-. буемое положение роликов определяют по расстоянию х между поверхностями 5 и 6 при правке в первом ручье или 7 и 8 - при правке во втором ручье. Способ осуществляют следующим образом. На пару нерегулируемых (нихших) роликов натягивают эластичный ремень с нанесенными на нем через равные промех(утки метками. Приводят во вращение нерегулируемые ролики. Определяют, например, по строботахометру исходного частоту следования меток. Производят перемещение регулируемого (верхнего ролика до требуемого положения. Полох ение верхнего ролика контролируют по величине относительного уменьшения.частоты следования меток, соответствующего заданной деформации проката. Величину уменьшения частоты следования метоб на эластичном ремне определяют по заданной деформации проката следующим образом. Настраивают сортоправильную машину, определяя положение верхнего ролика, например, методом пробных пропусков. Устанавливают эластичный ремень с метками на пару нижних роликов. Приводят во вращение нижние ролики и измеряют частоту следования меток на эластичном ремне, который испытывает дополнительное растяжение, огибая верхний ролик. Отводят верхний ролик вверх таким образом, чтобы он не касался ремня. Измеряют частоту следования меток на эластичном ремне. Поскольку скорость ремня постоянна {привод обеспечивает жесткую связь роликами ). то - . 3 , ;изменение частоты следования меток на ремне однозначно зависит от рассто яния между рабочими поверхностями ручья. , i Зависимость мекаду требуемым смещением регулируемого ролика (фиг.З) и относительным уменьшением частоты следования меток определяют, учитывая, что обычно с «fi- Чзсто сЛ не превышает 0,05 Rj Рэди ус регулируемого ролика. Длина ремня при отсутствии натяжения регулируемым роликом равна E 4 - -2J7Rj, где А - мемцентровое расстояние меж ду роликами; радиус нерегулируемого роли ка. После деформации ремня его длина составляет Ц (К + ) -2.:(R,R,). ()Так, при X « 1 V1-X й1-у X , . Значение угла ot находят, рассматривая прямоугольные треугольники 0;,02S и 0,02С , sinci slr()sln ot, cosctg-coaot Sin . . Из- указанных треугольников цолуча / -- А Ц А-% sfnc,.-g.-, s 2--j- ; vv Ooso4 g cos так как при малых d. (()
(
2сГt,,+
ДБ
(,2)
1 /1()) Л Таким образом, абсолютное удлиие ремня составит ( осительное удлинение Аи . -71- - 2АБ (LA + JRj 2 () енебрегал Л((Д2() При растяжении ремня время между охох дением двух соседних меток еличивается пропорционально аблютному удлинению ремня Т-- 1 . V е . - частота следования меток до деформации ремня регулируемым ролиу ком; частота следования ме2 ток после деформации ремня; V - скорость движения ремня; и 2 расстояние между метка ми до и.после дефоомации ремня. Переход от абсо/тотного к отйосильному удлинению ремня позволяет ключить скорость движе ния ремня -., -§±-А , - V е V - V -f сле преобразований получаем ..x к как cif 2 то Относительное уменьшение частоты следования меток практически рав но относительному увеличению рассто яния метками , которое, в свою очередь, однозначно связано с расстояние1 1 между рабочими поверх нocтя и , Найденные значения . сво дят в таблицу для настронки сортоправильной машины. На значения- -Vпрактически не влияет исходная час -тота следования меток. После настройки машины эластичный ремень извлекают машины. .Пример, Верхний регулируемый ролш перемещают е горизонтал ном направлении до тех пор, пока вершины нерегулируемых роликов 3 и середина технологической канавки на ролике не окажутся в плоскости, перпендикулярной осям вращения роли ков. На пару нерегулируемьт нижних Iроликов 3 натягивают эластичный ремень t, на котором нанесены метки шириной мм. Приводят во вращение нижние ролики и протягивают ремень со скоростью ЮОм/мин. Исходная частота следования меток составляет , 10009i. 25000 1/мин (166 1/с. При, исходн1.1х данных R 300, А 650 и с 20 мм получим величину относительного уменьшения частоты следования меток .{300+275 f-20 650{ 2fe50-Hj7300)65o24(300+275 1,, Измерительная система состоит из стандартных, приборов считывателя импульсов на основе фотодиода и час тотомера, например, модели , позволяющего суммировать число им-пульсов с точностью до одн,ого импульса. Определение с точноЬтью 10 можно сделат&, если измерение частоты будет пшизведено с точностью 0,1-1,210 1СГ, что может быть выполнено, если будет считано 10 импульсов. Для этого потребуется суммирование импульсов производить в течение времени h мин 2500( С помощью указанного частотомера производят определение величины . В проце.ссе настройки машины требуется поднастроек. Таким образом, в процесс настройки займет не более 20-25 мин, причем в процессе настройки не образуется брака. Сокращения времени настройки можно добиться путем повьнцения скорости движения ремня или увеличения числа меток на нем. После настройки ремень снимают с роликов. Предлагаемый способ настройки благодаря одновременному выполнению операций установочного перемещения регулируемых роликов и определения расстояния между рабочими поверхностями роликов в просвет.е позволяет устранить пробные пропуски, что ускоряет и упрощает процесс настройки и дает возможность оперативно производить настройку машины при минимальных затратах. Неравномерный износ роли; ов не приводит к услохшению и Замедлению процесса настройки машины, так как базовый отсчет частоты следования меток производится при движении эластичного ремня по существующим рабочим поверхностям ручьев. Обеспечение оперативного контроля . настройки сортоправильной машины позволяет увеличить выпуск высококачественного проката как за счет уменьшения на настройку, так и за счет отсутствия брака, который образуется при пробных пропусках.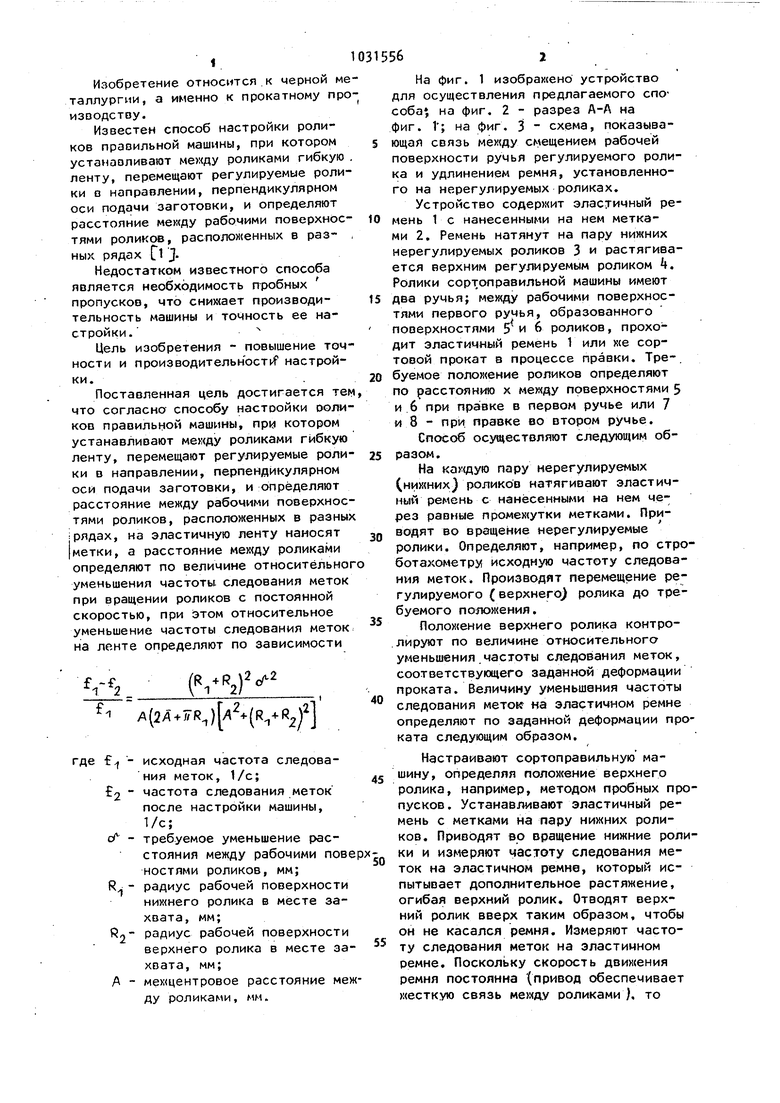
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЛЕНТЫ РАСТЕНИЙ | 2002 |
|
RU2221361C2 |
| ТЕРЕБИЛКА ЛЬНА | 2022 |
|
RU2802228C1 |
| МАШИНА ДЛЯ УБОРКИ ЛЬНА | 2001 |
|
RU2236111C2 |
| ТЕРЕБИЛЬНЫЙ АППАРАТ ЛЬНОУБОРОЧНОЙ МАШИНЫ | 2013 |
|
RU2552428C1 |
| ПОДБОРЩИК-ОБОРАЧИВАТЕЛЬ ЛЕНТ ЛЬНА | 1994 |
|
RU2122309C1 |
| ТЕРЕБИЛЬНЫЙ АППАРАТ ЛЬНОУБОРОЧНОЙ МАШИНЫ | 2010 |
|
RU2446666C2 |
| ЭТИКЕТИРОВОЧНАЯ МАШИНА | 2006 |
|
RU2319647C1 |
| ЛЬНОУБОРОЧНЫЙ КОМБАЙН | 1971 |
|
SU308706A1 |
| СПОСОБ УБОРКИ ЛЬНА-ДОЛГУНЦА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2268576C2 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС НАНЕСЕНИЯ ЭТИКЕТОК | 2006 |
|
RU2319648C1 |
CfWCOfi НАСТРОЙКИ РОЛИКОВ ПРАВИЛЬНОЙ ШШЫ, при котором устанавливают роликами гибкую лент перемещают регулируемые ролики в направлении перпендикулярном к оси подачи заготовки, и определяют расстояние мевду рабочими поверхностями роликов, расположенных в разных рядах, отличающийся тем, что, с целью повышения томности и производительности настройки, на эла тичную ленту наносят метки, а рассто яние мехчду роликами определяют по ве личине относительного уменьшения час следования меток при вращении ов с постоянной скоростью, при относительное уменьшение частоедования меток на ленте опредепо зависимости .::( A(,)(R,R2) - исходная частота следования меток, 1 частота следования меток после настройки машины, 1/cj требуемое уменьшение расстояния между рабочими поверхностями роликов, мм; радиус рабочей поверхности нижнего ролика в месте захвата, мм; радиус рабочей поверхности верхнего ролика в месте захвата, мм; Л - межцентровое расстояние между роликами, мм. . .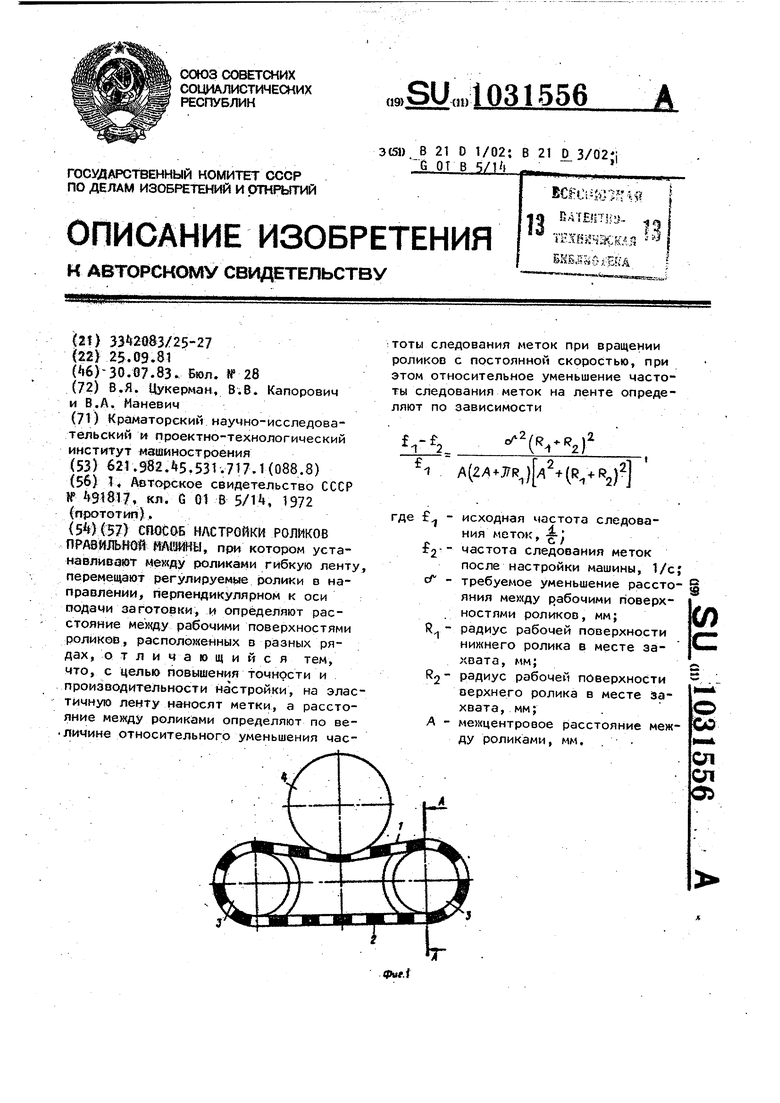
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
