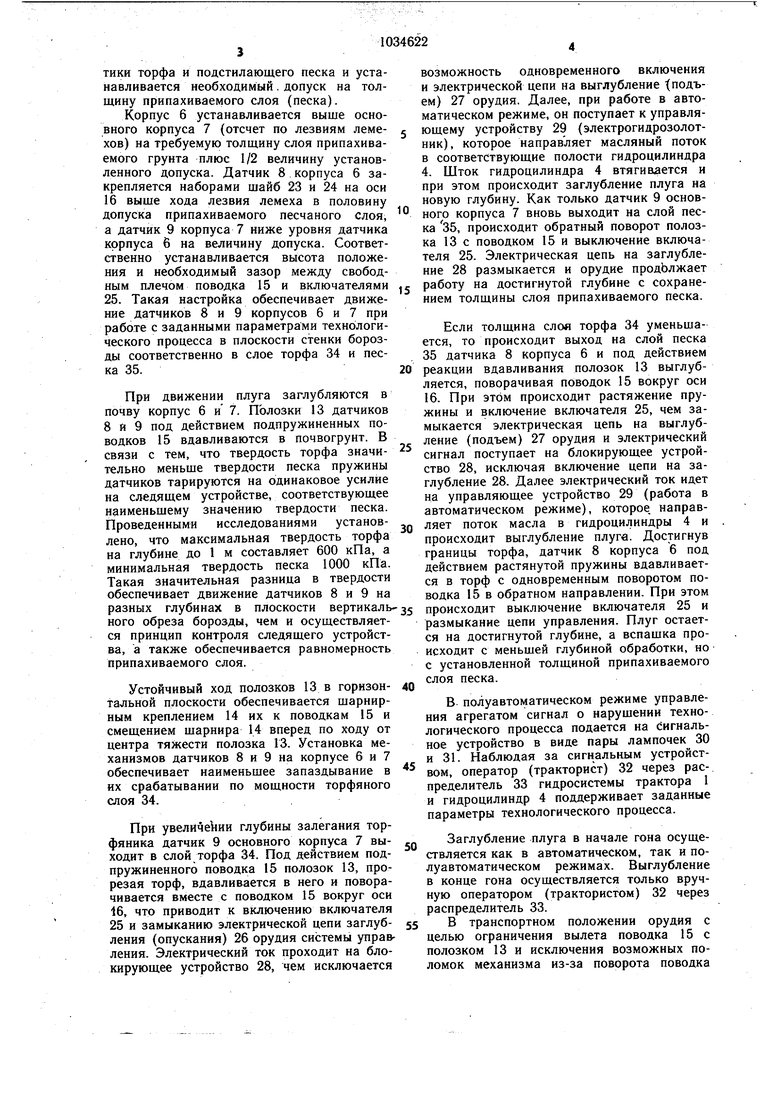
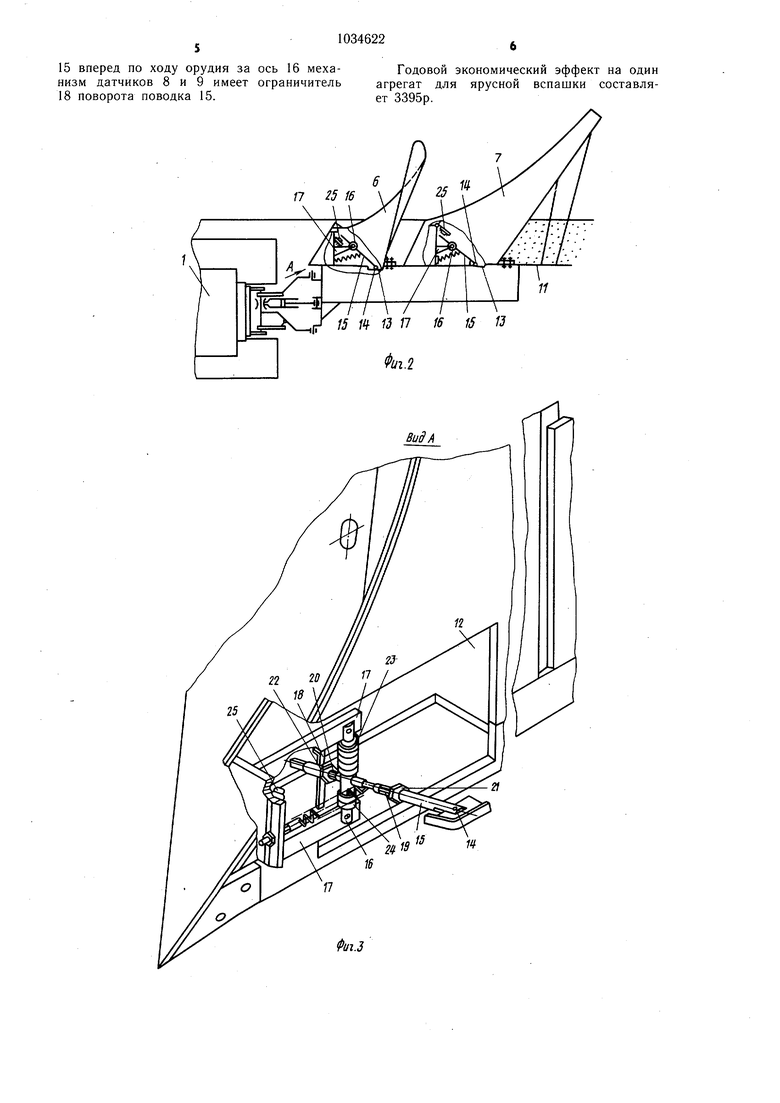
Изобретение относится к сельскохозяйственному машиностроению, в частности к агрегатам для ярусной вспашки мелкозалежных торфяников с выносом на дневную поверхность подстилаемого песка при создании новой структуры почвы. Известен агрегат для ярусной вспашки, включающий движитель, раму с плужными корпусами и систему управления подъемом и опусканием рамы орудия Недостатком этого агрегата является невозможность получения равномерной глубины припахиваемого слоя песка. Наиболее близким по технической суш,ности к предлагаемому является агрегат для ярусной вспашки, включаюш,ий движитель, к которому посредством системы управления подъема и опускания подсоединена рама орудия с поярусно и-последовательно расположенными по ходу движения плужными корпусами с полевыми досками, а также датчик твердости грунта следяш,его устройства, связанного с системой управления, при этом горизонтальная плоскость, проходящая через режущую кромку лемеха первого по ходу движения агрегата плужного корпуса, расположена выше соответствующей плоскости второго по ходу движения корпуса 2. Однако и этот агрегат не обеспечивает равномерную толщину припахиваемого минерального слоя из-за установки следящего устройства между основным корпусом и предплужником, где следящее устройство контактирует с постоянно разрыхляемым грунтом и, как правило, подает неустойчивый сигнал на систему управления, кроме того, один датчик следящего устройства, перемещаясь по границе раздела генетических слоев, выдает постоянно чередующиеся сигналы «Подъем-опускание, снижает надежность и долговечность работы системы управления. Цель изобретения - повыщение качества вспашки почвы с различным соотношением генетических слоев, повышение надежности работы агрегата. Поставленная цель достигается тем, что следящее устройство снабжено дополнительным датчиком твердости грунта, а упомянутые датчики расположены в общей продольно-вертикальной плоскости со стороны полевых досок плужных корпусов и выще горизонтальных плоскостей, проходящих через режущие кромки лемехов, причем система управления подъемом рамы орудия связана с первым по ходу движения датчиком, а опускания - со вторым. На фиг. 1 представлена схема агрегата в рабочем положении, вид сбоку; на фиг. 2 - то же, вид в плане; на фиг. 3 - вид А на фиг. 2, в аксонометрии; на фиг. 4 - схема управления агрегатом. Агрегат для ярусной вспащки состоит из движителя 1, к которому посредством системы управления подъема и опускания 2, имеющей навесное устройство 3, гидроцилиндр 4 с электрической частью его управления, подсоединена рама 5 с поярусно и последовательно расположенными по ходу движения плужными корпусами 6 и 7, при этом горизонтальная плоскость, проходящая через режущую кромку лемеха первого по ходу движения агрегата плужного корпуса 6, расположена выше соответствующей плоскости второго плужного корпуса 7. На агрегате смонтировано следящее устройство с датчиками твердости грунта 8 и 9, которые размещены в общей продольно-вертикальной плоскости в выполненных в полевых досках 10 и 11 плужных корпусов 6 и 7 окнах 12. Каждый датчик твердости грунта выполнен, например, в виде полозка 13, соединенного в шарнире 14 с одним из плеч телескопического подпружиненного двуплечего поводка 15, шарнирно установленного на вертикальной оси 16, жестко закрепленной к кронштейнам 17, на верхнем из которых установлен ограничитель 18 нерабочего поворота поводка 15. Телескопическое изменение длины плеч поводка 15 обеспечивается резьбовыми соединениями 19 и 20 и фиксируется контрогайками 21 и 22. Высота поводка 15 на оси 16 регулируется наборами шайб 23 и 24. На уровне подпружиненного плеча поводка 15 в корпусах 6 и 7 закреплены выключатели 25 электрической цепи системы управления агрегатом. Электрическая часть системы управления агрегата для ярусной вспашки (фиг. 4) состоит из двух подсхем: автоматического и полуавтоматического режима работы. В автоматическом режиме она включает датчик 8 корпуса 7, управляющего системой опускания 26, орудия, и датчика 9 корпуса 6, управляющего системой подъема 27 орудия, и соединенных через блокирующее устройство 28 с управляющим устройством 29 направления хода штоков гидроцилиндра 4 подъема-заглубления рабочих органов. В полуавтоматическом режиме схема управления включает те же датчики 8 и 9, связанные через то же блокирующее устройство 28 с лампочками 30 и 31 сигнального устройства, воздействующими на оператора 32, управляющим распределителем 33 гидросистемы машины, содержащей и гидроцилиндр 4. На фиг. 1 также показаны слои торфа 34 и подстилаемого песка 35. Агрегат работает следующим образом. По результатам предварительной зондировки поля, подлежащего ярусной вспашке, определяется среднестатическое значение толщины слоя торфа и характеристики торфа и подстилающего песка и устанавливается необходимый . допуск на толщину припахиваемого слоя (песка).
Корпус 6 устанавливается выше основного корпуса 7 (отсчет по лезвиям лемехов) на требуемую толщину слоя припахиваемого грунта плюс 1/2 величину установленного допуска. Датчик 8.корпуса 6 закрепляется наборами шайб 23 и 24 на оси 16 выше хода лезвия лемеха в половину допуска припахиваемого песчаного слоя, а датчик 9 корпуса 7 ниже уровня датчика корпуса 6 на величину допуска. Соответственно устанавливается высота положения и необходимый зазор между свободным плечом поводка 15 и включателями 25. Такая настройка обеспечивает движение датчиков 8 и 9 корпусов 6 и 7 при работе с заданными параметрами технологического процесса в плоскости стенки борозды соответственно в слое торфа 34 и песка 35.
При движении плуга заглубляются в почву корпус 6 и 7. Полозки 13 датчиков 8 и 9 под действием подпружиненных поводков 15 вдавливаются в почвогрунт. В связи с тем, что твердость торфа значительно меньше твердости песка пружины датчиков тарируются на одинаковое усилие на следящем устройстве, соответствующее наименьщему значению твердости песка. Проведенными исследованиями установлено, что максимальная твердость торфа на глубине до 1 м составляет 600 кПа, а минимальная твердость песка 1000 кПа. Такая значительная разница в твердости обеспечивает движение датчиков 8 и 9 на разных глубинах в плоскости вертикаль ного обреза борозды, чем и осуществляется принцип контроля следящего устройства, а также обеспечивается равномерность припахиваемого слоя.
Устойчивый ход полозков 13 в горизонтальной плоскости обеспечивается шарнирным креплением 14 их к поводкам 15 и смещением шарнира 14 вперед по ходу от центра тяжести полозка 13. Установка механизмов датчиков 8 и 9 на корпусе 6 и 7 обеспечивает наименьшее запаздывание в их срабатывании по мощности торфяного слоя 34.
При увеличении глубины залегания торфяника датчик 9 основного корпуса 7 выходит в слой торфа 34. Под действием подпружиненного поводка 15 полозок 13, прорезая торф, вдавливается в него и поворачивается вместе с поводком 15 вокруг оси 16, что приводит к включению включателя 25 и замыканию электрической цепи заглубления (опускания) 26 орудия системы управления. Электрический ток проходит на блокирующее устройство 28, чем исключается
возможность одновременного включения и электрической цепи на выглубление tподъем) 27 орудия. Далее, при работе в автоматическом режиме, он поступает к управляющему устройству 29 (электрогидрозолотник), которое направляет масляный поток в соответствующие полости гидроцилиндра 4. Шток гидроцилиндра 4 втягивается и при этом происходит заглубление плуга на новую глубину. Как только датчик 9 основног о корпуса 7 вновь выходит на слой песка 35, происходит обратный поворот полозка 13 с поводком 15 и выключение включателя 25. Электрическая цепь на заглубление 28 размыкается и орудие продЬлжает работу на достигнутой глубине с сохранением толщины слоя припахиваемого песка.
Если толщина слоя торфа 34 уменьшается, то происходит выход на слой песка 35 датчика 8 корпуса 6 и под действием реакции вдавливания полозок 13 выглубляется, поворачивая поводок 15 вокруг оси 16. При этом происходит растяжение пружины и включение включателя 25, чем замыкается электрическая цепь на выглубление (подъем) 27 орудия и электрический сигнал поступает на блокирующее устройство 28, исключая включение цепи на заглубление 28. Далее электрический ток идет на управляющее устройство 29 (работа в автоматическом режиме), которое, направляет поток масла в гидроцилиндры 4 и происходит выглубление плуга. Достигнув границы торфа, датчик 8 корпуса 6 под действием растянутой пружины вдавливается в торф с одновременным поворотом поводка 15 в обратном направлении. При этом происходит выключение включателя 25 и размыкание цепи управления. Плуг остается на достигнутой глубине, а вспашка происходит с меньшей глубиной обработки, но с установленной толщиной припахиваемого слоя песка.
В полуавтоматическом режиме управления агрегатом сигнал о нарущении технологического процесса подается на сигнальное устройство в виде пары лампочек 30 и 31. Наблюдая за сигнальным устройством, оператор (тракторист) 32 через распределитель 33 гидросистемы трактора 1 и гидроцилиндр 4 поддерживает заданные параметры технологического процесса.
Заглубление плуга в начале гона осуществляется как в автоматическом, так и полуавтоматическом режимах. Выглубление в конце гона осуществляется только вручную оператором (трактористом) 32 через распределитель 33.
В транспортном положении орудия с целью ограничения вылета поводка 15 с полозком 13 и исключения возможных поломок механизма из-за поворота поводка
15 вперед по ходу орудия за ось 16 механизм датчиков 8 и 9 имеет ограничитель 18 поворота поводка 15.
Годовой экономический эффект на один агрегат для ярусной вспашки составляет 3395р.
ФигЛ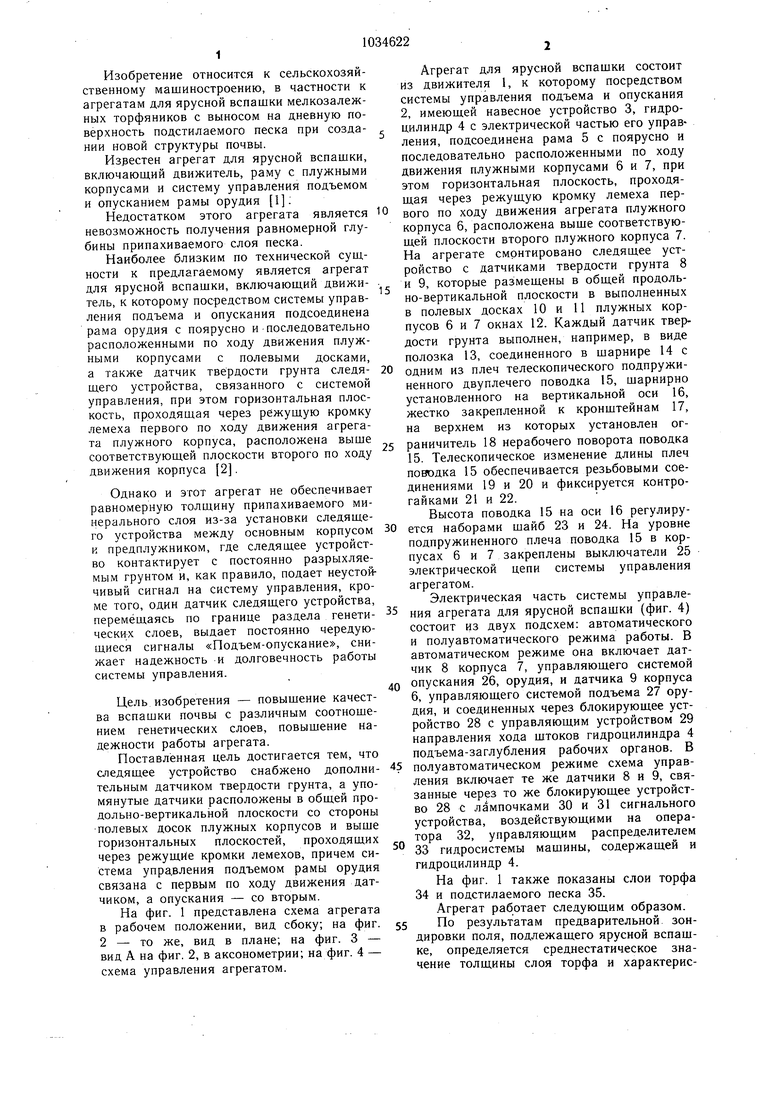
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛУГ | 2006 |
|
RU2335107C2 |
| Плуг для ярусной вспашки | 1979 |
|
SU828992A1 |
| Агрегат для ярусной вспашки | 1980 |
|
SU917719A1 |
| Плуг для ярусной вспашки почвы | 1983 |
|
SU1090272A1 |
| Двухъярусный плуг | 1990 |
|
SU1764527A1 |
| ПАХОТНЫЙ АГРЕГАТ | 2013 |
|
RU2538397C2 |
| ПЛУГ | 2012 |
|
RU2491807C1 |
| Ярусный плуг | 1983 |
|
SU1165244A1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2000 |
|
RU2193831C2 |
| МОТОПЛУГ | 2015 |
|
RU2606279C1 |
АГРЕГАТ ДЛЯ ЯРУСНОЙ ВСПАШКИ, включающий движитель, к которому посредством системы управления подъема и опускания подсоединена рама орудия с поярусно и последовательно расположенными по ходу движения плужныJ 35 25 /7 f ми корпусами с полевыми досками, а также датчик твердости почвы следящего устройства, связанного с системой управления, при этом горизонтальная плоскость, проходящая через режущую кромку лемеха первого по ходу движения агрегата плужного корпуса, расположена выше соответствующей плоскости второго по ходу движения корпуса, отличающийся тем, что, с целью повышения качества вспашки почвы с различным соотношением генетических слоев и надежности работы агрегата, следящее устройство снабжено дополнительным датчиком твердости грунта, а упомянутые датчики расположены в общей продольно-вертикальной плоскости со стороны полевых досок корпусов и выше горизонтальных плоскостей, проходящих через режущие кромки лемехов, причем система управления подъема рамы орудия связана с первым по ходу движения датчиком, а опускания - со вторым. W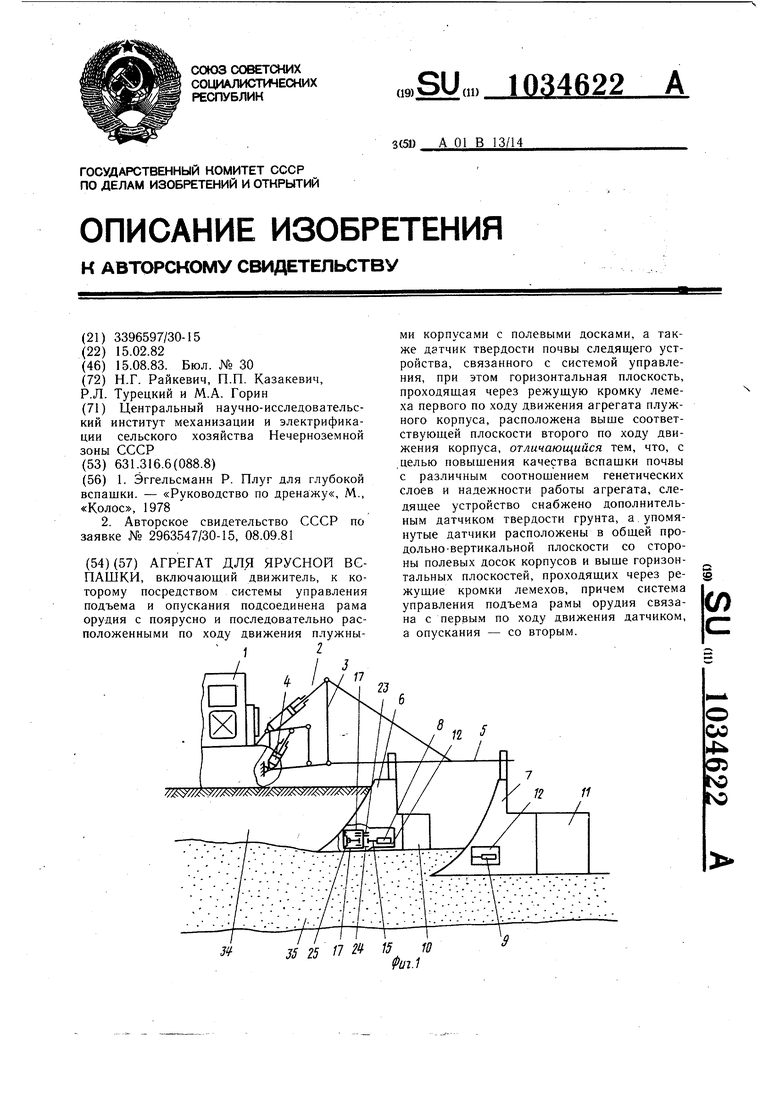
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Эггельсманн Р | |||
| Плуг для глубокой вспашки | |||
| - «Руководство по дренажу«, М., «Колос, 1978 2 | |||
| Авторское свидетельство СССР по заявке № 2963547/30-15, 08.09.81 (54) | |||
