Изобретение относится к aetOMatMческому управлению электроэнергетическими агрегатами, в частности к автоматическому регулированию частоты последних, при резких изменениях характеристик нагрузки, например, при выделении агрегата из энергосис темы в случае аварии и работе на изо лированный район, при сбросе нагрузки и т.п. Известны способы автоматической коррекции уставок регуляторов частоты при изменении характеристик нагрузки. Простейший из них заключаетс в автоматическом изменении устайок динамических параметров регуляторов при переходе агрегата от режима холостого хода к режиму работы на энер госистему. Согласно этому способу уставки переключаются при включении и отключении выключателя генератора сигналом, формируемым блок-контактом выключателя t Зи ГО Недостаток указанного способа заключается в том, что уставки выбираются, исходя из обычной схемы вклю чения генератора в сеть, и при нестандартном включении могут привести к нарушению устойчивости, например при выделении агрегата на изолирован ный район в результате аварии передачи. При этом действия персонала по ручному изменению уставок могут оказаться неправильными, так как характеристики нагрузки энергорайона и величины возмущений в нем, как правило, неизвестны. Известны также способы, основанные на выявлении режима автоколебаний и на программном изменении уставок динамических параметров регулятора частоты для демпфирования колебаний. Фирмой Вудворд режим автоколебаний выявляется по движению регулирующего органа путем формирования верхнего и нижнего пределов допустимых отклонений и регистрации ситуаций последо вательных отклонений выходной координаты за зону допустимых отклонений Если интервал времени между двумя последовательными, противоположными по знаку, такими отклонениями меньше чем некоторый заранее заданный (10100 с), то такое поведение системы классифицируется ка автоколебательное и формируется сигнал переключения уставок динамических параметров на определенное время (2-10 мин). S за7692тем уставки возвращаются в исходное положение Г 3 3 Однако быстрое переключение уставок (через 10-100 с) может быть ложным, так как в аварийной ситуации можёт произойти несколько системных переключений подряд, вызывающих большие возмущения, и коррекция характеристик регулятора может быть неверной, что приводит к ухудшению свойств системы управления в целом. Кроме того, не определяется направление изменения характеристик регулятора и нет гарантии, что система после переключения будет устойчива. Наиболее близким к изобретению является способ коррекции характеристик регулятора частоты электроэнергетического агрегата по колебаниям контролируемого параметра (частоты), в котором также формируются два предела допустимых отклонений (верхний и нижний), регулируются последовательные выходы контролируемого параметра за пределы упомянутой зоны и осуществляется счет числа колебаний за контрольное время, а при превышении числа колебаний установленного уровня осуществляется изменение динамических параметров регулятора J Недостатки способа:не определяется направление изменения характеристик регулятора, что не гарантирует устойчивости во вйех возможных ситуациях, например, при выделении на потребителя с отрицательным самовыравниванием; допускаются автоколебания регулирующего органа произвольной амплитуды, что может привести к израсходованию Запаса рабочей жидкости рля силовой следящей системы (в случае гидрогенератора) и отключению генератора от сети. Таким образом, ни аналоги, ни прототип не обеспечивают надежного и правильного воздействия на изменение характеристик регулятора при действии возмущений с одновременным изменением свойств нагрузки. Цель изобретения - повышение надежности функционирования. Указанная цель достигается тем, что согласно способу автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата, основанному на изменении уставок динамических параметров регулятора измеряют электрическую активную мощность генератора, внешние и форми 310 руемые регулятором параметры, определяющие энергетическую характеристику двигателя, а также скорость изменения формируемого регулятором параметра, на основе энергетической ха1характеристики двигателя по измеренным значениям внешних параметров,- ее определяющих, и электрической активной мощности, прогнозируют значение форми руемого регулятором параметра, при котором будет достигнут баланс мощностей двигателя и генератора, формируют дополнительный сигнал - разность прогнозируемого и измеренного значений упомянутого параметра, формируют также сигнал допустимого .ртклонения, пропорциональный произведению выпрямленных значений сигналов доп олнительного и скорости изменения параметра, формируемого регулятором, уставки динамических параметров регулятора изме няют по пропорционально-интегральному закону используя в качестве входного сигнала произведение сигналов дополнительного и скорости изменения, параметра, формируемого регулятором, а сигнал допустимого отклонения испол зуют для смещения нуля интегрирования При описании способа использованы обозначения: электрическая активная мощность, генератора; мощность, развиваемая двигателем;nj| .П.- внешние параметры, определяющие режим двигателя; положение регулирующего органа;выходной сигнал регулятора; сигнал частоты вращения; уставки динамических пара,|Метров. Все обозначенные величины технически несложно преобразуются с помощью различных измерительных преобразователей в электрические сигналы, пропорциональные их значениям в данный момент времени. Если на систему регулирования действует возмущение со стороны нагрузки, т.е. изменяется Над, то первоочередной задачей управления является наискорейшее достижение баланса между МдцИ , чтобы.предотвратит разгон ротора, так как, a. ю dt где U) - угловая скорость; 3 - момент инерции ротора; . скорость изменения кинетичёркой энергии ,ротора. При Мдв- ы,д.о; 0 г о и, слеь61UI довательно. что свидетельствует о компенсации действующего возмущения и переходе систе1««1| в режим стабилизации. Первой операцией способ, если считать необходикше величины измеренными, является прогнозирование ожидаемого равновесного значения параметра формируемого регулятором по сигналам электрической активной мощности генератора.внешним параметрам и энергетической характе| Истике двигателя. Результат прогноза показывает при каком значении параметра, определяющего режим двигателя иформируемого регулятором, например, положении регулирующего органа или напряжений электронного блока, будет достигнут баланс мощностей, отдаваемой генератором в сеть и развиваемой двигателем. Иными словами непрерывно формируется сигнал, который указывает при каком значении выходного сигнала будет достигнуто равновесие. Этот сигнал может быть сформирован с помощью нелинейного функционального преобразователя на основе экспериментально снятой характеристики (, П, П2, ...) П, П,, ...) и - 1 9 Вторая операция способа - формирование дополнительного сигнала разности между прогнозируемым и измеренным значениями формируемого регулятором параметра. Дополнительный сигнал характеризует величину действующего на систему возмущения .или величину отклонения ее от положения равновесия. Третья операция способа - формирование сигнала допустимого отклонения .равного произведению выпрямленных значений сигналов дополнительного и скорости изменения параметра, формируемого регулятором и определяющего режим двигателя Этот сигнал количественная оценка амплитуды колебаний системы вокруг положения равновесия. Четвертая операция способа - формирование входного сигнала для пропорционально-интегрального закона изменения уставок регулятора, которы определяется как произведение дополн тельного сигнала на сигнал скорости изменения параметра, формируемого ре гулятором и определяющего режим двигателя. Например, если дополнительный сиг нал положителен, то регулятор должен увеличивать свой выходндй сигнал, чтобы достигнуть равновесия системы, если, кроме того, скорость изменения выходного сигнала также положительна то можно изменять уставки на увеличе ние быстродействия,. в этом случае знак произведения положителен. Так как в положении равновесия ре гулятора величина входного сигнала для ПИ - закона изменения уставок равна нулю, то уставки определяются интегрированным выходным сигналом. Смысл формирования сигнала допустимого отклонения и использование его в качестве смещающего нуль при интег рировании становится очевидным при рассмотрении режима автоколебаний в системе. В этом случае дополнительны сигнал и сигнал скорости изменения параметра, формируемого регулятором, синусоиды, сдвинутые по фазе, и oneрация интегрирования дает в этом слу чае постоянный результат, если рассматриваемые синусоиды сдвинуты по 1)азе на 90, на уи, что эквивалентно автоколебательной настройке регулятора. Использование в качестве смещающе го нуль интегрирования сигнала, пропорционального произведению амплитуд сигнала допустимого отклонения и ско рости изменения параметра, формируем регулятором, гарантирует настройку с заранее заданным запасом по фазе в контуре главной обратной связи, что говорит о постоянстве показателей устойчивости системы. I В некоторых случаях первая операция способа может быть несколько видоизмененной: вместо прогнозирования равновесного положения регулирующих органов, можно прогнозировать мощность, которая будет развита двигате лем в статике при данном положении регулирующих органов по характеристике ( /X, П , 11, .. J П.. П. чдвки, и, м. Предлагаемый способ может быть реализован применительно к регуляторам частоты вращения гидроагрегата. В качестве параметра, определяющего режим гидротурбины и формируемого регулятором, возьмем положение главного сервомотора. А о скорости изменения этого параметра можно судить по смещению главного золотника от положения равновесия. Эти сигналы используются в современных системых управления . Для стабилизации указанных систем широко используется гибкая обратная (изодромная) связь, которая выполняется, например, ввиде инерционной связи по скорости перемещения главного сервомотора. На фиг.1 представлена структурная схема изодромного регулятора, характеристики которого корректируются устройством, реализующим предлагаемый способ; на фиг.2 - энергетическая характеристика гидроагрегата. Устройство содержит иммитатор (нелинейный функциональный преобразователь) 1, блок вычитания (субстрактор) 2, выпрямители 3 и 4, блоки умножения 5 и 6, пропорциональный элемент 7, интегратор 8, сумматор 9, электромеханический элемент 10, управляющий изменением уставок, измеритель частоты вращения 11, элемент рассогласования 12, пропорциональное звено 13 гибкой oбpafи6й связи, электрогидравлический преобразователь 1ч, инерционное звено 15 гибкой обратной связи, звено 16 формирования статической характеристики регулятора, главный золотник 17, датчик 18 положения главного золотника, главный сервомотор 19, датчик 20 положения главного сервомотора, гидроагрегат 21, измеритель 22 мощности, датчик 23напора ГЭС,. Для прогнозирования значения параметра, формируемого регулятором, необходимо располагать энергетической характеристикой агрегата, т.е. статической зависимостью мощности, развиваемой двигателем от положения регулирующего органа и напора для случая примера реализации. Такая характеристика для гидроагрегата известна по результатам натурных или модельных испытаний (фиг.2). Прогнозирование заключается в нахождении того значения положения регулирующего органа /и, |при котором двигатель разовьет мощность, :равную мгновенному значению электрической мощности генератора. Фактичес ки надо определить значения функции (ц. заданным значениям переменных, от которых она зависит: электри ческой активной мощности генератора и действующего на рабочее колесо напора (Jli,-ii-V MHO/H ном/ Указанную задачу можно решить с .помощью нелинейных функциональных преобразователей достаточно широко применяекмх а аналоговых устройствах различного назначения. Устройство работает следующим образом. При изменении сигнала например увеличении электрической активной мощности Мдд, который формируется из мерительным преобразователем 22 мощности, в первый момент времени сервомотор 19 регулятора неподвижен. Им митатор 1 формирует сигнал, который дает значение сигнала, пропорциональ ного положению главного сервомотора, необходимое для достижения равновеси при измеренной мощности и напоре (сигнал датчика 23), этот сигнал больше сигнала датчика 20 положения, т.е. дополнительный сигнал, снимаемы с блока 2 вычитания, положителен. Па дение частоты вращения вызывает смещение главного золотника 17 в положительном направлении, т.е. на движение сервомотора вверх. Произведени сигнала датчика положения главного золотника (сигнал датчика 18) и дополнительного сигнала положительно, что приводит к формированию пропорциональным каналом (пропорциональный элемент, сумматор 9, элемент 10, звено 13, звено 15) сигнала к уменьшению интенсивности стабилизирующего воздействия и ускорению компенсации возмущ.ния. В момент времени, когда дополнительный сигнал становится рав :Ным нулю, уставки возвращаются в исходное положение, и при дальнейшем движении регулятора наблюдается процесс увеличения интенсивности воздей ствия в цепи стабилизирующей обратной ,Q связи (звенья 13 и 15), что приводит к быстрому торможению движения главного сервомотора 19. Таким образом, воздействие, пропорциональное произведению сигнала отклонения главного золотника и дополнительного сигнала, спо-собствует удержанию регулирующего органа в окрестности положению равновесия, т.е. не позволяет развиться автоколебаниям. Так как само это проиЭведение при малых колебаниях величина второго порядка малости, то окончательная установка уставок осуществляется на малых колебаниях интегрирующим каналом (выпрямители 3 и k, блок умножения 6, интегратор В, сумматор 9, элемент 10), который на частоте собственных колебаний системы устанавливает определенный сдвиг по фазе в разомкнутом контуре, чем обеспечивает заранее заданный коэф(Ьициент затухания колебаний. При реализации предлагаемого способа для других систем регулирования частоты в его состав могут дополнительно включаться: фильтры высокой и низкой частоты, блоки формирования знаковых функций для повышения эффективности пропорционального сигнала, дифференциаторы, выполняющие функции измерителей скорости, несколько исполнительных устройств для изменения различных уставок и специальные цепи, вводимые в прямой тракт регулятора для возможности реализации способа, например связка компаратор - интегра тор, охваченные отрицательной обратной связью. Технико-экономические преймущества способа по сравнению с известными заключаются, прежде всего, в непрерывном контроле за переходным процессом, причем пропорциональный сигнал ПИ - закона управления ставками осуществляет быстрое изменение свойств регулятора в течение самого переходного процесса, а неинтегрированный сигнал обеспечивает окончательный выбор уставок для установившегося режима. .
Фиг.1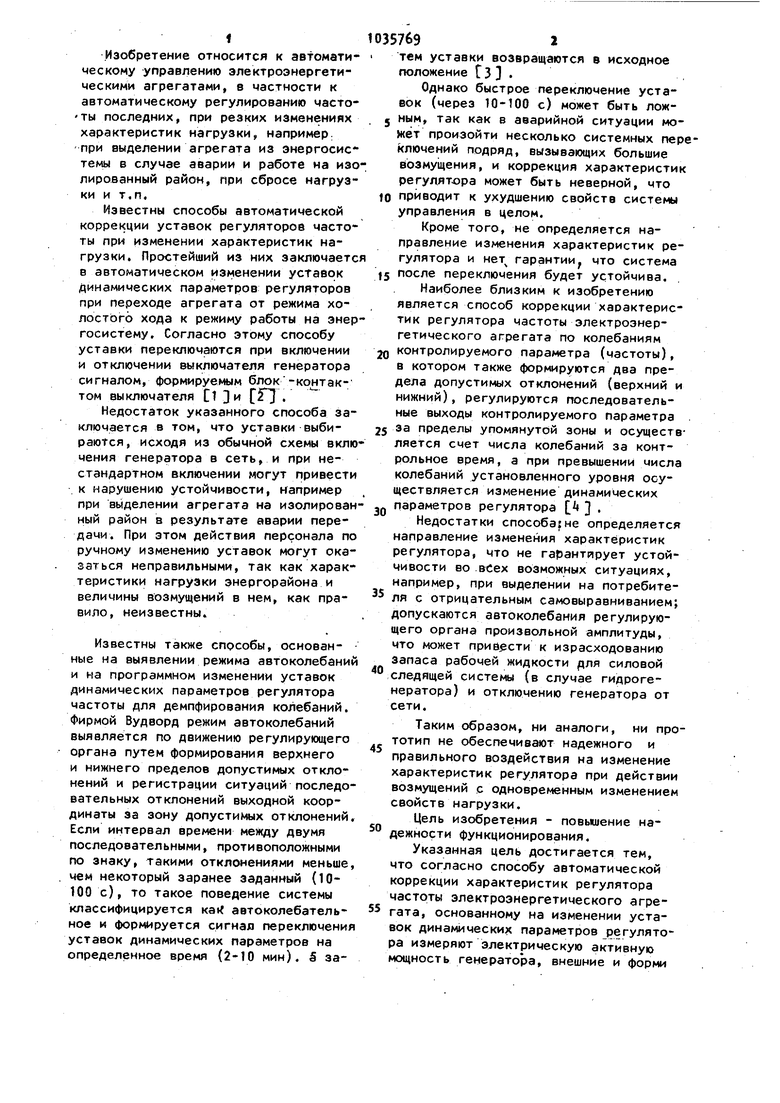


СПОСОБ АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ХАРАКТЕРИСТИК РЕГУЛЯТОРА ЧАСТОТЫ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОГО АГРЕГАТА, основанный на изменении уставок динамических параметров регулятора, о тличающийся тем, что, с целью повышения надежности функционирования регулятора, измеряют электрическую активную мощность генератора, внешние и формируемые регулятором параметры, определяющие энергетическую характеристику двигателя, a также скорость изменения формируемого регулятором параметра, на основе энергетической характеристики двигателя по измеренным значениям внешних параметров, ее определяющих, и электрической активной мощности, прогнозируют значение формируемого регулятором параметра, при котором будет достигнут баланс мощностей двигателя и генератора, формируют дополнительный сигнал - разность прогнозируемого и измеренного значений упомянутого параметра, формируют также сигнал i допустимого отклонения, пропорциональ ный произведению выпрямленных значений скорости изменения параметра, формируемого регулятором, и дополнительного сигнала и изменяют уставки jje динамических параметров регулятора по пропорционально-интегральному закону, используя в качестве входного сигнал, пропорциональный произведеDO нию значений дополнительного сигнала сл | на скорость изменения формируемого регулятором параметра, a сигнал доЭд пустимого отклонения используют для :о смещения угла интегрирования.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пивоваров В,А | |||
| Проектирование и расчет систем регулирования гидротурбин | |||
| Л., Машиностроение % 1973, С.215: 2,Фирменный проспект ШЗ i tf its, - Электрогйдравлйческий регулятор РИТМ-1, 197 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР Vf кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| (З) | |||
