со
00
;о о
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования моторных реакций животных | 1984 |
|
SU1309936A2 |
| ОХРАННАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА | 2000 |
|
RU2231123C2 |
| Устройство для отображения измерительной информации | 1984 |
|
SU1197146A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Устройство для считывания информации с подвижных объектов | 1988 |
|
SU1576395A1 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА С СЕЛЕКТИВНЫМ МАСШТАБИРОВАНИЕМ | 2000 |
|
RU2174745C1 |
| Система магнитной записи и воспроизведения телевизионных сигналов | 1980 |
|
SU995375A1 |
| ОХРАННАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА "ДЕНЬ-НОЧЬ" | 2002 |
|
RU2234818C2 |
| Телевизионное устройство для контроля движения транспортных средств | 1983 |
|
SU1235002A1 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА С СЕЛЕКТИВНЫМ МАСШТАБИРОВАНИЕМ | 2000 |
|
RU2199828C2 |
1. УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ МОТОРНЫХ РЕАКЦИЙ ЖИВОТНЫХ, включающее электростимулятор, подключенный через переключатель к электродам, вживленным в мозг животного. о т л и ч ю w е в с я тем, что, с целью повьшения точности и расширения 1)ункциональных возможностей, оно снабжено блоком формирования траектории, телевизионной камерой, селектором, блоком элементов И, блоком регистрации, смесителем и видеоконтрольнЕям блоком, причем телевизионная камера выходами соединена с входами селектора, видеоконтрольногр блока, смесителя- и блока формирования траектории, подключенного выходами к входам смесителя и блока элементов И, который подключен выходгши к входам переключателя и блока регистрации, а входом - к селектора, при этом выход смесителя подключен к I входу видеоконтрольного блока. (Л 2. Устройство по п. 1, о т л и ч а ю- ш е е С я тем, что переключа тель выполнен в виде электронного ;коммутатора. §
0uti
Изобретение относится к сельскому хозяйству, в частности к изучению поведения животных и их моторных реакций.
Известны устройства, включгиощие электростимулятор, подключенный через переключатель к электродам, вживленным в мозг животного l С2.
Недостатками известных устройств являются низкая точность и ограниченные функциональные возможности.
Цель изобретения - повышение точ-i ности и расширение функциональных возможностей.
Указанная цель дбстигается тем, что устройство снабжено блоком формирования траектории, телевизионной камерой, селектором, блоком элементов И, блоком регистрации, смесителем и Видеоконтрольным блоком, причем телевизионная камера выходами соединена 3 входами селектора, видеоконарольного блока, смесителя и блока формирования траектории, подключенного выходами к входам смесителя и блока элементов И, который подключен .выходами к входам переключателя и блока регистрации, а входом - к выходу селектора, при этом выход смесителя подключен к входу видеоконтрольнрго блока.Переключатель выполнен в в.иде электронного коммутатора.
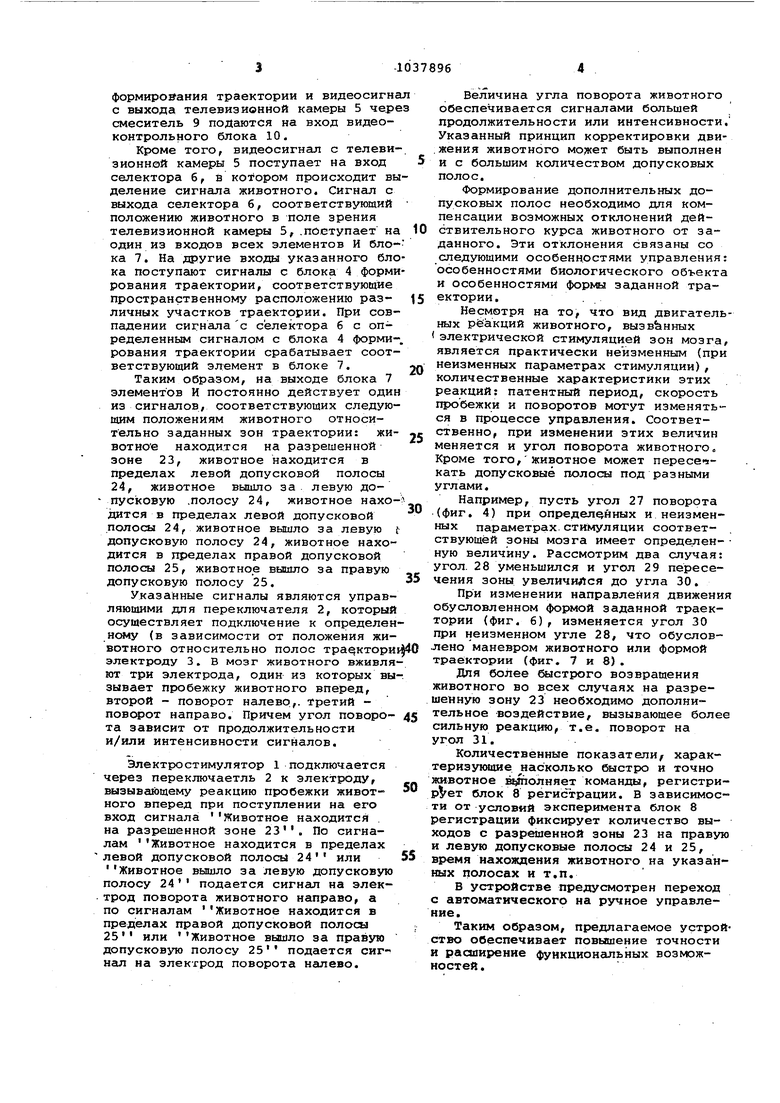
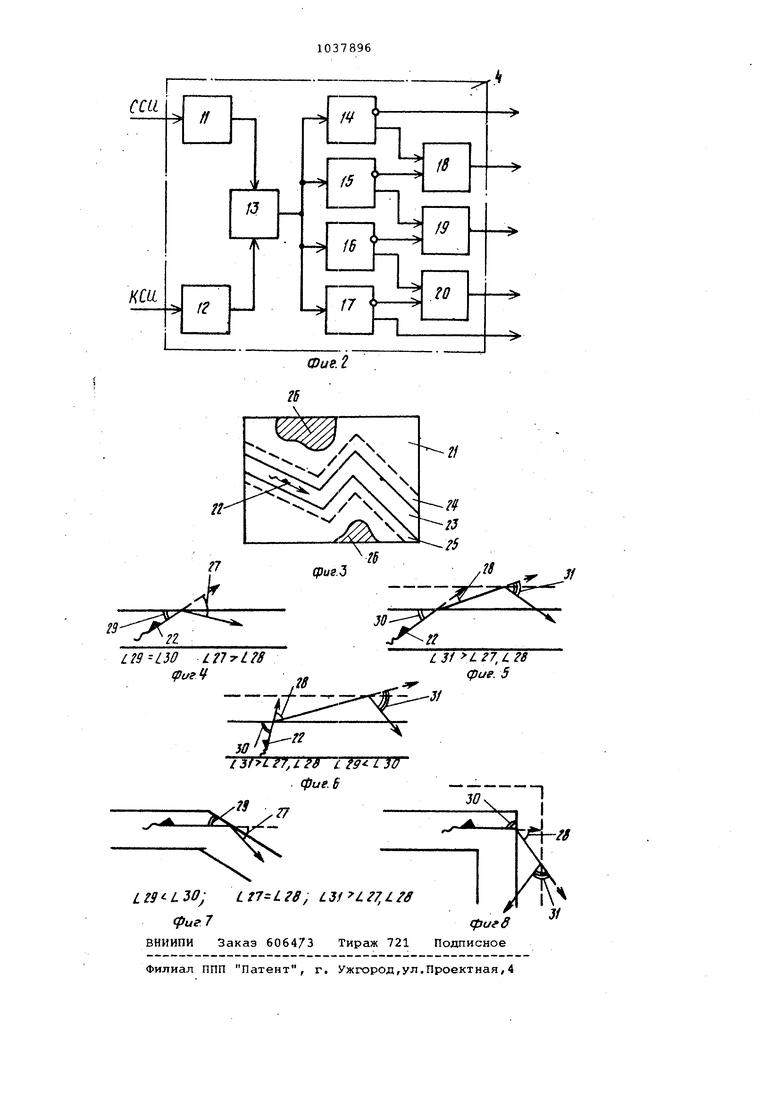
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - функциональная схема блока формирования траек-тории; на фиг. 3 - схематичный вид на экране; на фиг. 4 - пересечение животными границы разрешенной зоны под заданным углом; на фиг. 5 - изменение направления движения животного в допусковой зоне при его выходе.в разрешенную зону; на фиг. 6 то же, при пересечении им границы разрешенной зоны под углом большим заданного; на фиг. 7 и 8 - то же, при изогнутой форме границы разрешенной зоны.
Устройство включает электростимулятор 1, подключенный через переклю, чатель 2 к электродам 3, вживленным в мозг животного, блок 4 формирования траектории, телевизионную камеру 5, селектор б, блок 7 элементов И, блок 8 регистрации, смеситель 9 и видеоконтрольный блок 10, блок 4 формирдвания траектории имеет генераторы 11 и 12, сумматор 13, триггеры Шмигта 14-17, элементы И 18-20.
На фиг. 3-8 обозначены телевизионный растр 21 животное 22, разрешенная .зона 23 движения животного, левая допусковая полоса 24, правая допусковая полоса 25, препятствия 26, угол
27поворота животного при определенных и неизменных параметрах стимуляции соответствующей зоны мозга, угол
28увеличеннь1й угол 27, угол 29 пересечения животным разрешенной зоны ТТ, угол 30 увеличенный угол 29, угол 31 поворота животного, в котором телевизионная камера 5 выходами соединена с входами селектора 6, видеоконтрольного блока 10, смесителя 9 и блока 4 формирования траектории, подключенного выходами к входам смесителя 9 и блока 7 элементов И, который подключен выходами к входам переключателя 2 и блока 8 регистрации, а входом - с выходом селектора б, при этом выход смесителя 9 подключен к входу видеоконтрольного блока 10, причем переключатель 2 выполнен в виде элек тронного коммутатора.
Устройство работает следующим образом.
Параметры сти муляции животного 22, в мозг которого вживлены электроды 3, определяются предварительно по известным методикам.
Синхронизация работы видеоконтрольного блока 10 осуществля ется сигналом с телевизионной камеры 5. Блоком 4 формирования траектории формируется условное изображение задаваемой траектории. С выхода телевизионной камеры 5 на вход генераторов 11 и 12 блока 4 формирования траектории поступают соответственно строчные (ССИ) и кадровые (КСИ) синхроимпульсы. Генераторы 11 и 12 формируют импульсн строчной и кадровой частоты различной формы например пилообразной, треугольной параболической и др. Указанные импульсы поступают в сукматор 13, с выхода которого их адаптивная смесь подается на выходы триггеров Шмитта 14-17. Пороги срабатывания указанных триггеров Шмитта определяют фронт формируемой фигуры на экране видеоконтрольного блока 10. С выходов триггеров Шмитта 14-17 прямые и инверсные импульсы поступают на элементы И 18-20, на выходах которых, а также инверсном выходе триггера Шмитта 14 и прямом выходе триггера Шмитта 17 формируются сигналы допусковых зон траектории. Ширина зон определяется itbpoГами срабатывания триггеров Шмитта 17.
Форма импульсов на выходе генераторов 11 и 12 определяет форму траектории. Например, для импульсов пилообразной формы траектория будет представлять собой прямую линию, наклон которой определяется, соотношением амплитуд пилообразных импульсов строчной и кадровой частот. В случае пара-, боллической форлйл импульсов траектория будет иметь вид эллиптической замкнутой кривой. Используя другие генераторы и комбинируя их сочетания, получают более сложные траектоЕ ии. На экране видеоконтрольного блока 10 изображение задаваемой траектории совмещается с изображением животного, для чего сигналы с выходов блока 4
формирования траектории и видеосигнал с выхода телевиэионной камеры 5 через смеситель 9 подаются на вход видеоконтрольного блока 10.
Кроме того, видеосигнал с телевизионной камеры 5 поступает на вход 5 селектора б, в котором происходит выделение сигнала животного. Сигнал с выхода селектора б, соответствующий положению животного в поле зрения телевизионной камеры 5, .поступает на 10 один из входов всех элементов И блока 7. На другие входы указанного блока поступают сигналы с блока 4 формирования траектории, соответствующие пространственному расположению раз- 5 личных участков траектории. При совпадении сигнала с селектора 6 с определенным сигналом с блока 4 форми-. рования траектории срабатывает соответствующий элемент в блоке 7. 20
Таким образом, на выходе блока 7 элементов И постоянно действует один из сигналов, соответствующих следующим положениям животного относительно заданных зон траектории: жи- «s вотное находится на разрешенной зоне 23, животное находится в пределах левой допусковой полосы 24, животное вышло за. левую допусковую .полосу 24, животное нахо-л дится в пределах левой допусковой полосы 24, животное вышло за левую t допусковую полосу 24, животное находится в пределах правой допусковой полосы 25, животное вышло за правую допусковую полосу 25.
Указанные сигналы являются управляющими для переключателя 2, который осуществляет подключение к определенному (в зависимости от положения животного относительно полос тра кторИ1 0 электроду 3. В мозг животного вживляют три электрода, один из которых вы-, зывает пробежку животного вперед, второй - поворот налево.,, третий поворот направо. Причем угол поворо- 45 та зависит от продолжительности и/или интенсивности сигналов.
Электростимулятор 1 подключается ерез переключаетль 2 к электроду, вызыва1Ьщему реакцию пробежки живот- 50 ного вперед при поступлении на его вход сигнала Животное находится . на разрешенной зоне 23. По сигнаам Животное находится в пределах евой допусковой полосы 24 или 55 Животное вышло за левую допусковую олосу 24 подается сигнал на элекрод поворота животного направо, а по сигналам Животное находится в пределах правой допусковой полосы ;
25
или Животное вышло за правую
допусковую полосу 25 подается сигнгш на электрод поворота налево.
Величина угла поворота животного обеспечивается сигналами большей продолжительности или интенсивности. Указанный принцип корректировки дви.жения животного может быть выполнен и с большим количеством допусковых полос.
Формирование дополнительных допусковых полос необходимо для компенсации возможных отклонений действительного курса животного от заданного. Эти отклонения связаны со следующими особенностями управления: особенностями биологического объекта и особенностями формы заданной траектории. . .
Несмотря на то, что вид двигательных реакций животного, вызванных электрической стимуляцией зон мозга, является практически неизменным (при неизменных параметрах стимуляции), количественные характеристики этих реакций: патентный период, скорость пробежки и поворотов могут изменяться в процессе управления. Соответственно, при изменении этих величин меняется и угол поворота животного. Кроме того,животное может пересе- кать допусковыё полосы под разными углами.
Например, пусть угол 27 поворота (фиг. 4) при определенных и неизменных параметрах стимуляции соответствующей зоны мозга имеет определенную величину. Рассмотрим два случая: угол. 28 уменьшился и угол 29 пересечения зоны увеличился до угла 30.
При изменении направления движени обусловленном формой заданной траектории (фиг. 6), изменяется угол 30 при неизменном угле 28, что обусловлено маневром животного или формой траектории (фиг. 7 и 8) .
Для более быстрого возвращения животного во всех случаях на разрешенную зону 23 необходимо дополнительное воздействие, вызывающее более сильную реакцию, т.е. поворот на угол 31.
Количественные показатели характеризующие насколько быстро и точно животное в олняет команды, регистриpVsT блок 8 регистрации. В зависимости от условий эксперимента блок 8 регистрации фиксирует количество выходов с разрешенной зоны 23 на правую и левую допусковыё полосы 24 и 25, время нахождения животного на указанных полосах и т.п.
В устройстве предусмотрен переход с автоматического на ручное управление.
Таким образом, предлагаемое устройство обеспечивает повьниение точности и расширение функциональных возможностей .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лисейчиков Ю.Н | |||
| и др | |||
| Злек тронный привор для определения двигательной активности | |||
| -БЭВ | |||
| М | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПРЕВРАЩЕНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ КАПЕЛЬНЫХ, ПАРООБРАЗНЫХ И ГАЗООБРАЗНЫХ ЖИДКОСТЕЙ В ЭНЕРГИЮ ДАВЛЕНИЯ | 1923 |
|
SU633A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР №849576, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
